
Stability Control Strategies for Bidirectional Energy Storage Converters Considering AC Constant Power Loads


Abstract
1. Introduction
- (1)
- When the energy storage system is in charging and discharging states, nonlinear models of AC microgrids consisting of micro power sources, variable loads, and energy storage devices are constructed in a rotating coordinate frame.
- (2)
- The presented control techniques provide quantitative limits for the DC bus voltage loop control parameters of the energy storage DC/DC converter and the integral control loop control parameter of the energy storage DC/AC converter, and also interpret the positive stability influence of energy storage systems and micro power source, and the negative stability influence of AC CPLs.
- (3)
- The stability control strategies offer an important design basis for storage system converter control parameters and are very simple and easily implemented. Regulating outer voltage loop control parameters kp of energy storage DC/DC converter and inner current loop control parameters kip of DC/AC converter significantly increases large signal stability of islanded AC microgrids without extra equipment.
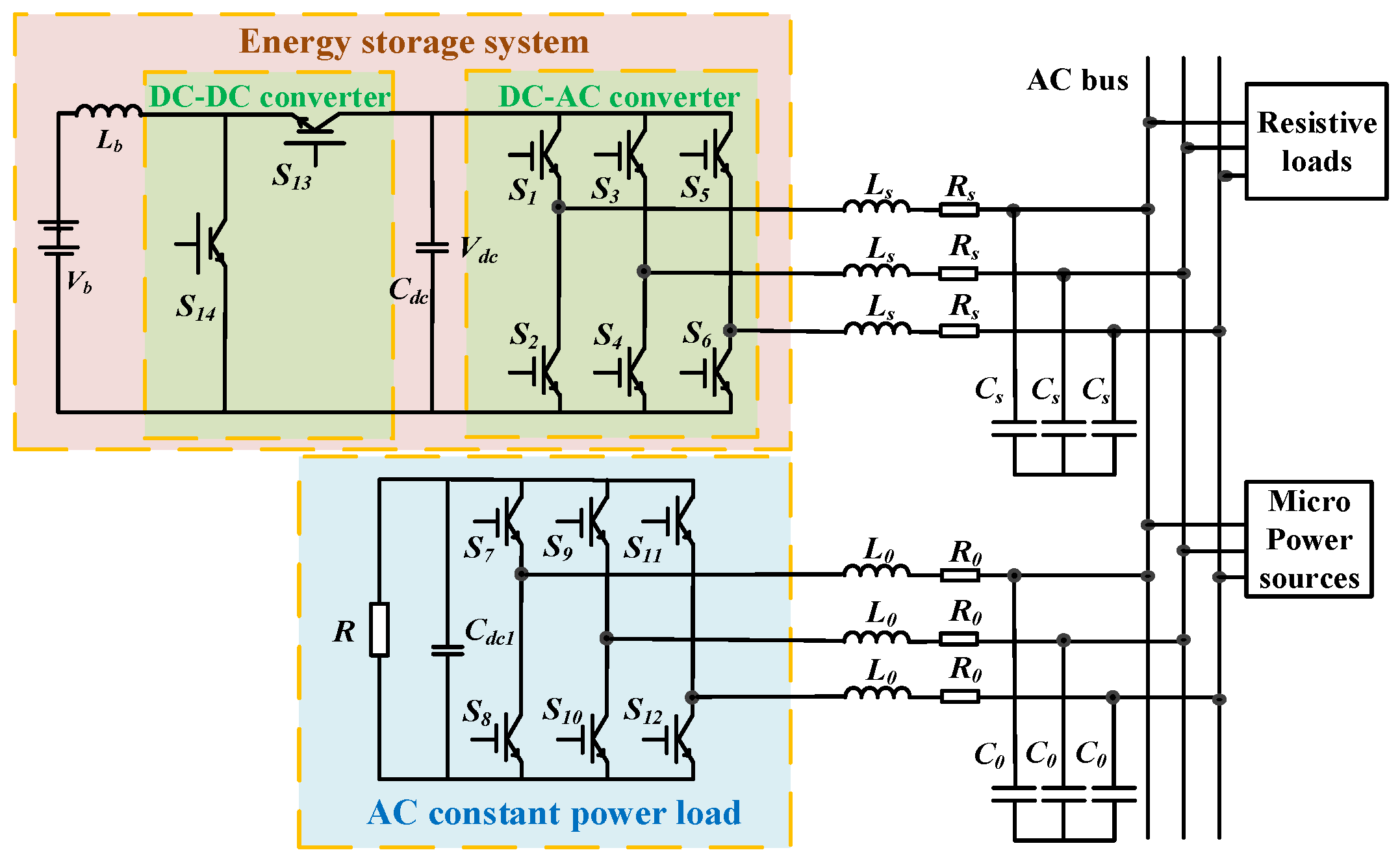
2. Simplified Nonlinear Models of AC Microgrids
2.1. AC Microgrids Characteristics
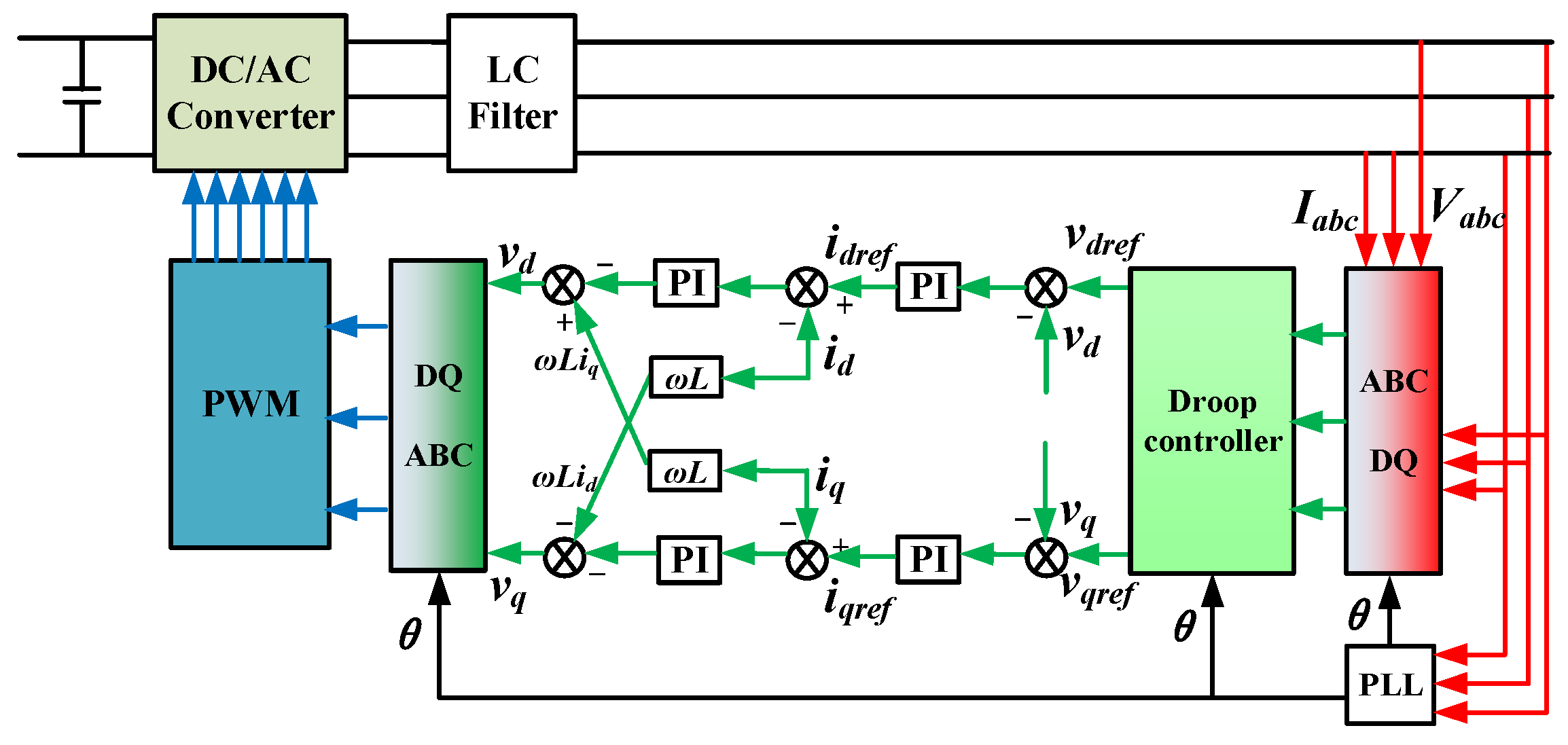
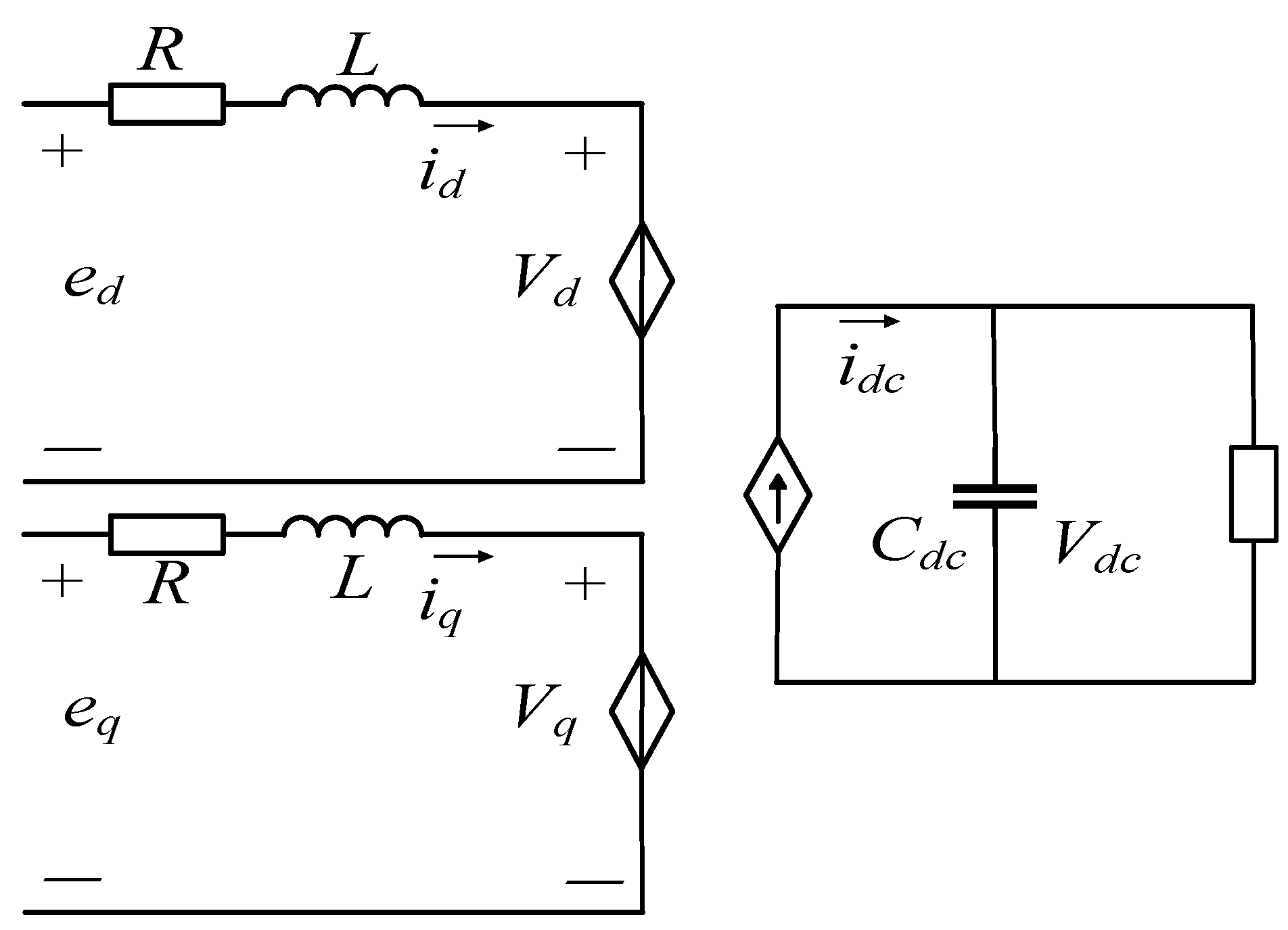
2.2. The Model of a Rotating Coordinate System DC-AC Converter
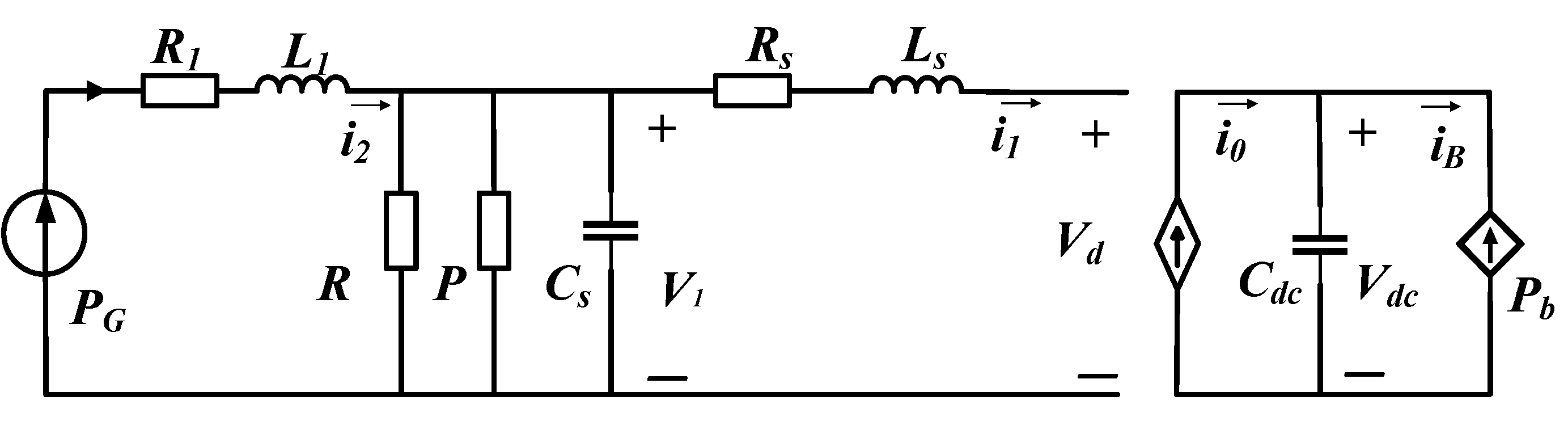
2.3. Nonlinear Models of AC Microgrids
3. AC Microgrid Stability Analysis Method for Large Signals
3.1. Large Signal Model When the Energy Storage System Is in a Discharging Condition
3.2. Large Signal Model When the Energy Storage System Is in a Charging Condition
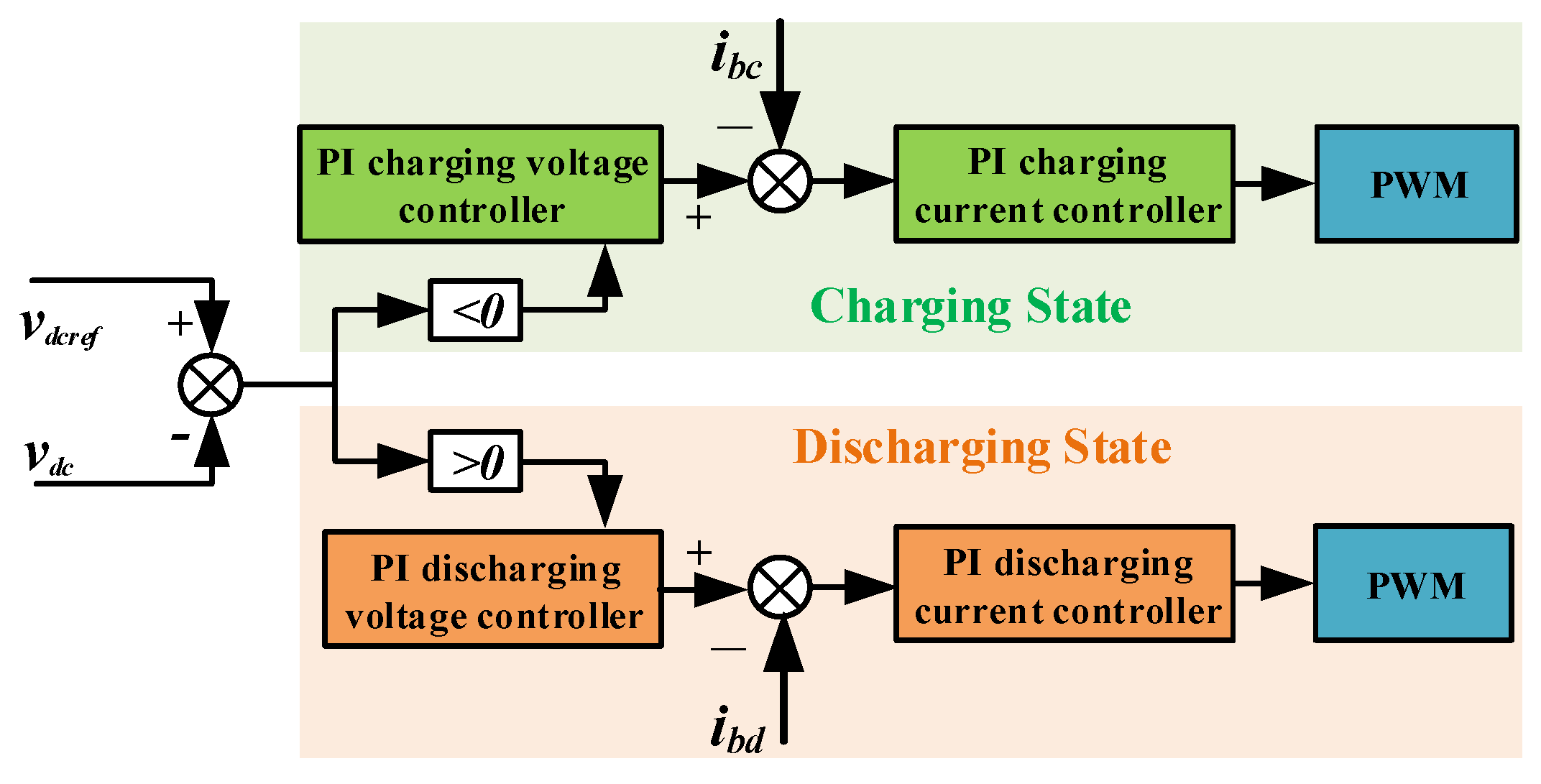
4. Stability Control Strategies for Energy Storage Converters
4.1. Stability Control Strategy When Energy Storage System in Discharging State
4.2. Stability Control Strategy When the Energy Storage System Is in Charging State
4.3. Comparative Analysis of Proposed Stability Control Strategies for Energy Storage Converters
5. Simulation Verification
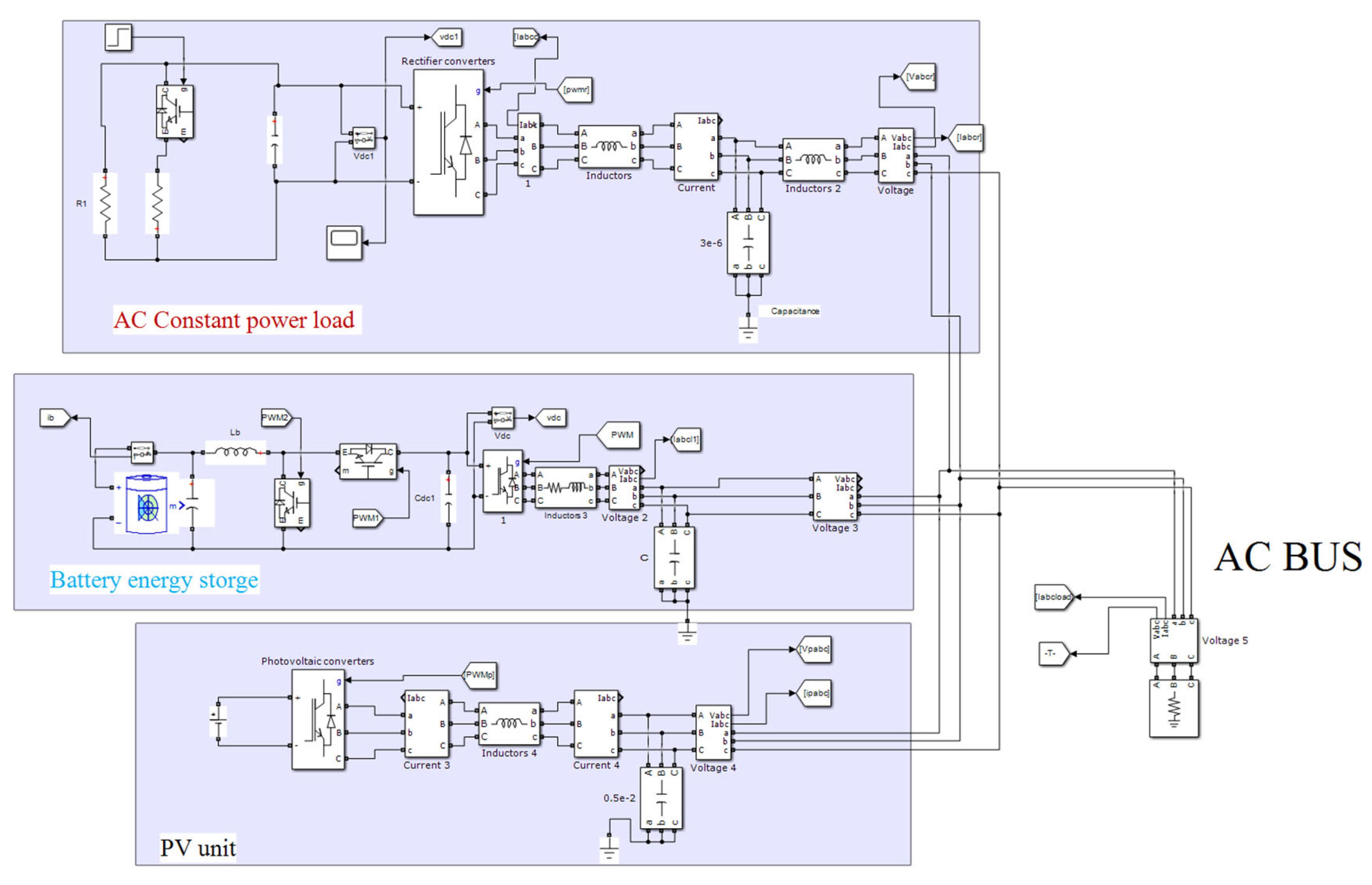
5.1. The Simulation Model of AC Microgrids
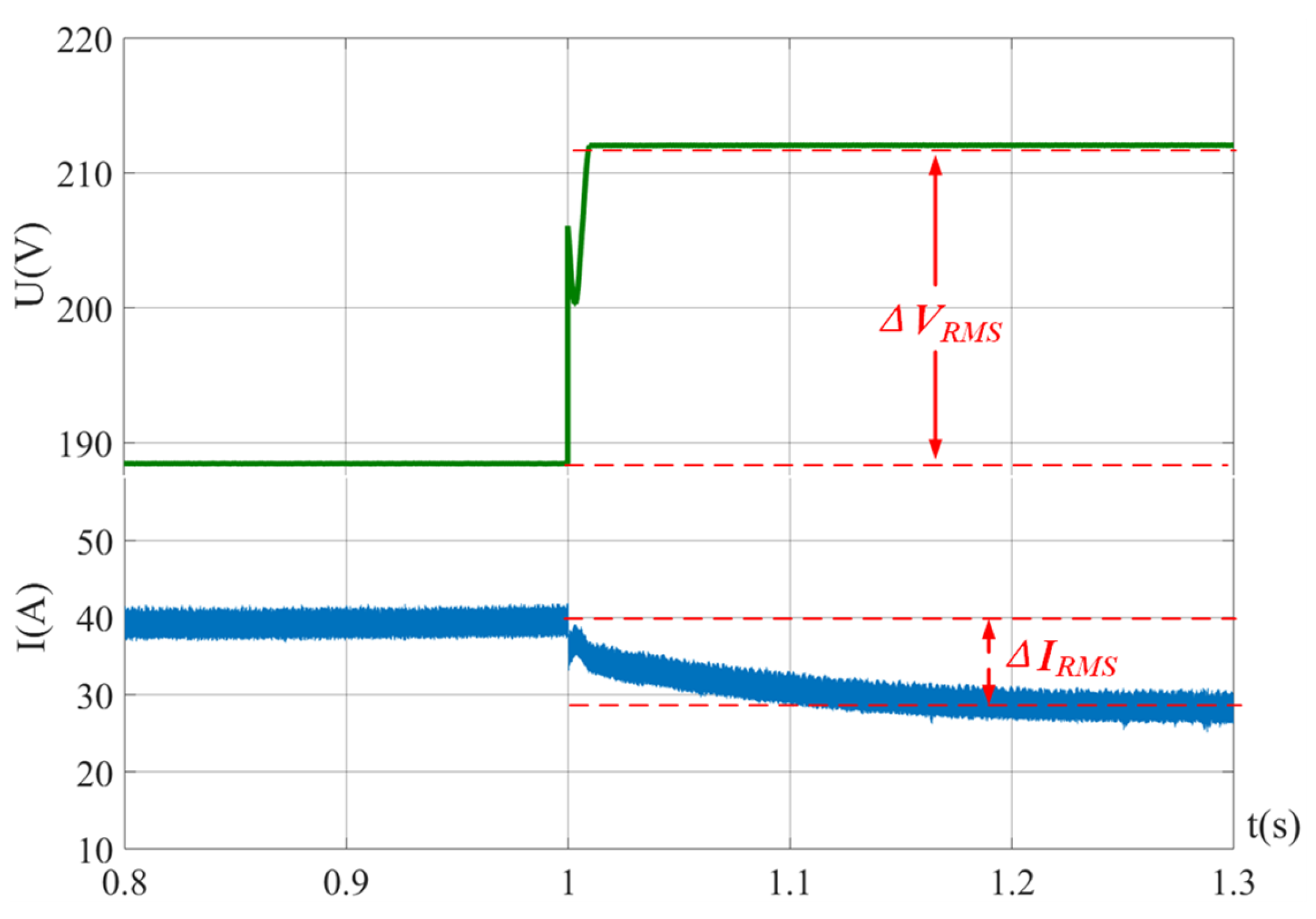
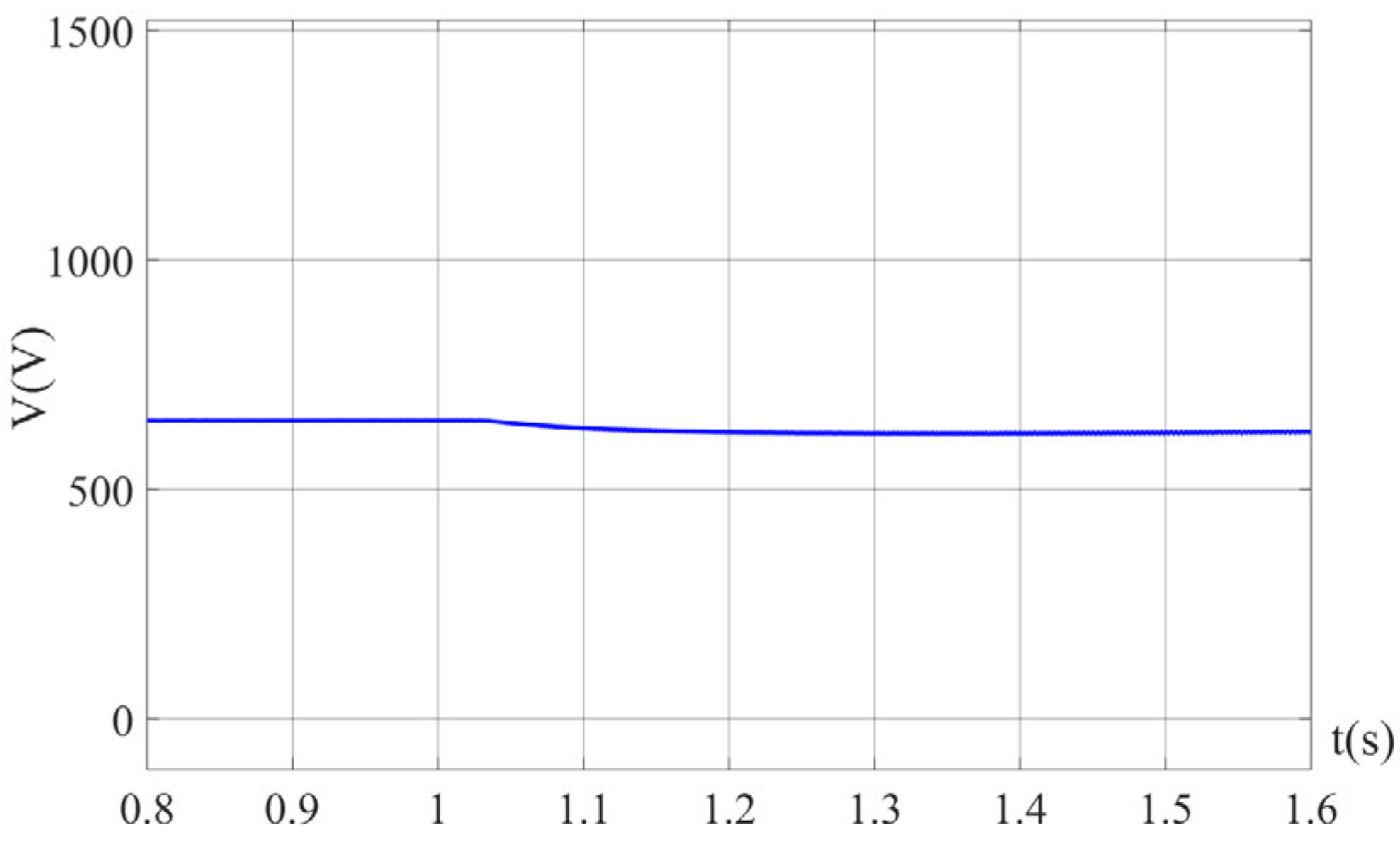
5.2. Stability Control Strategy Verification
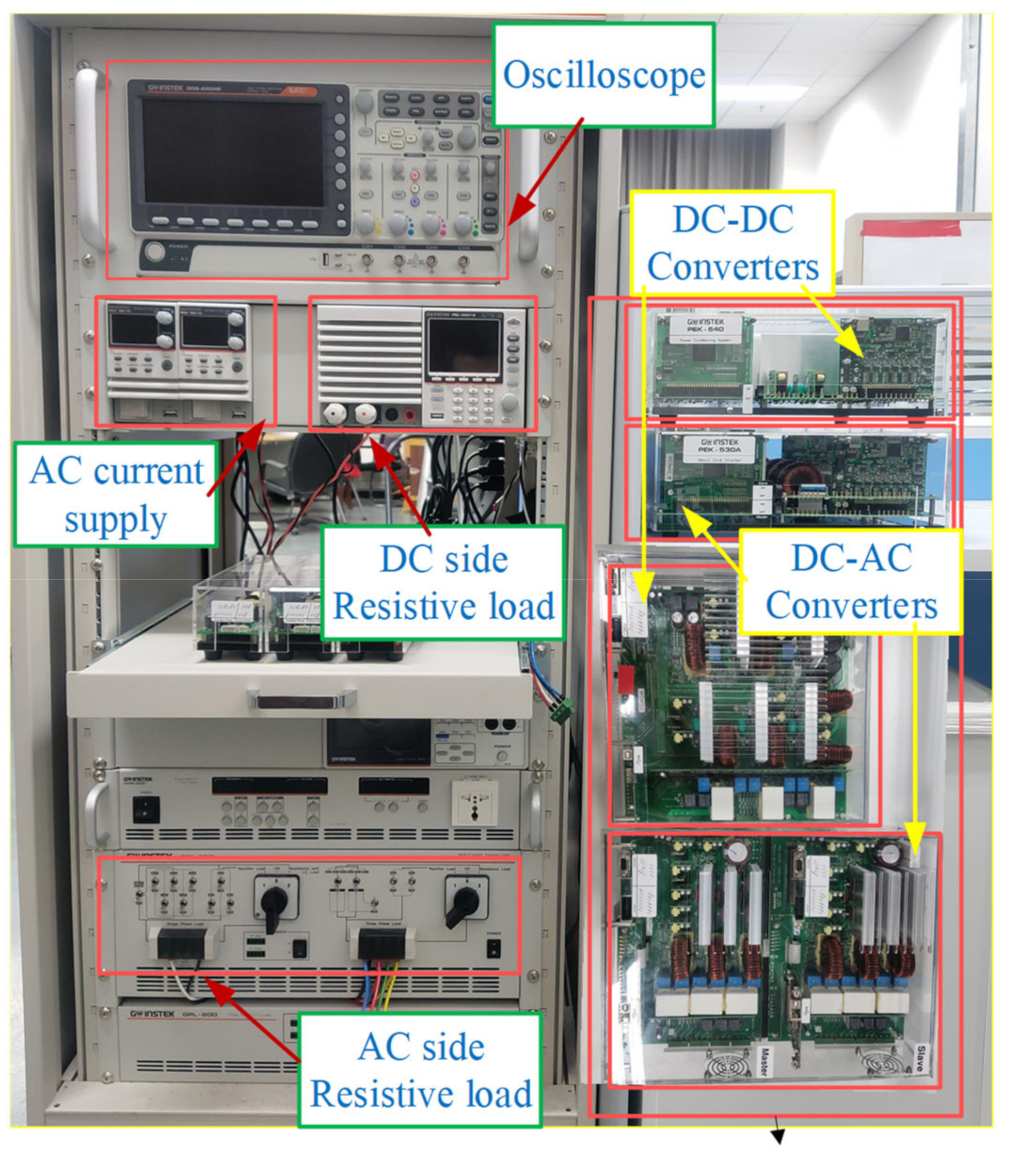
6. Experimental Results
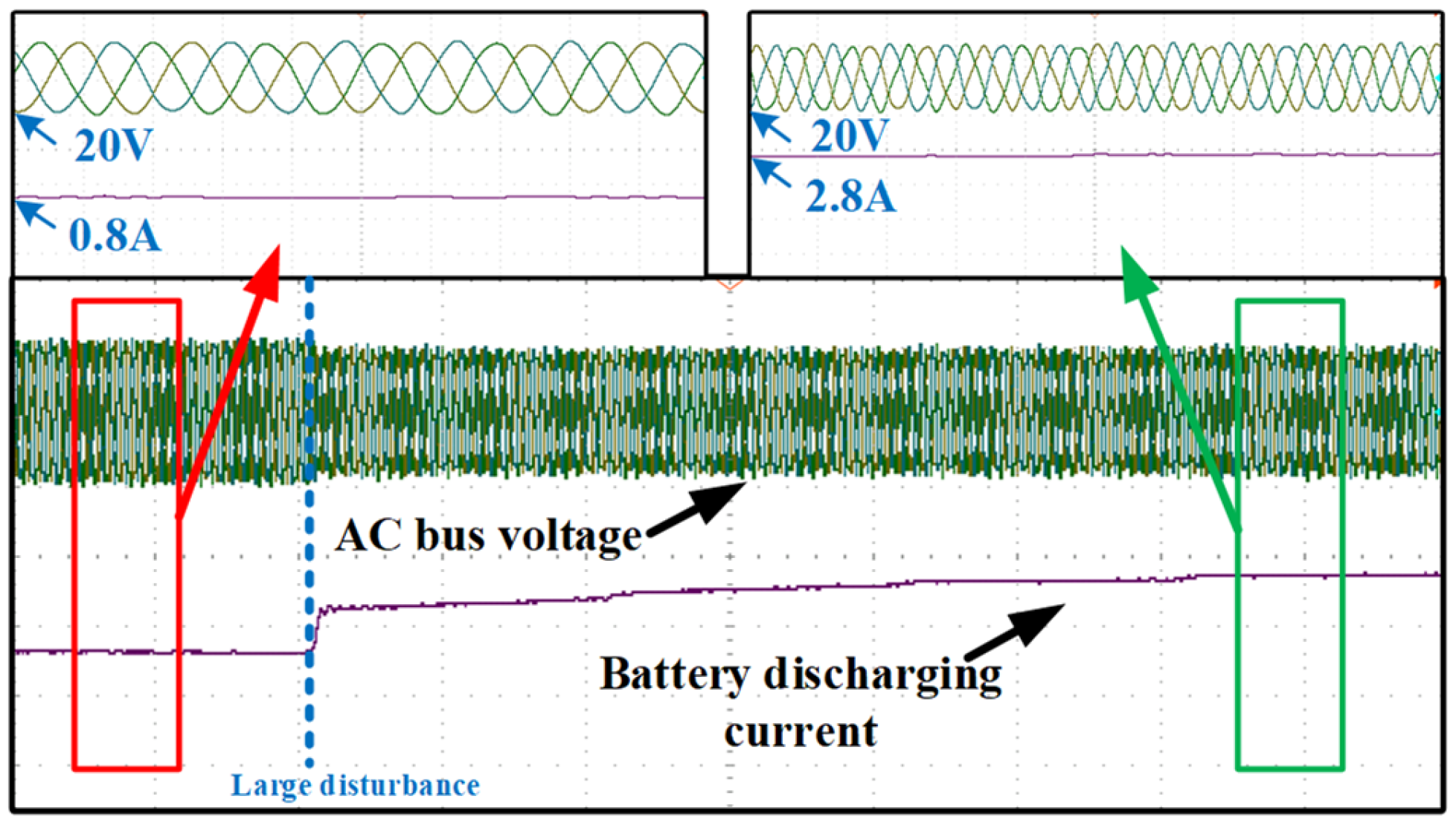
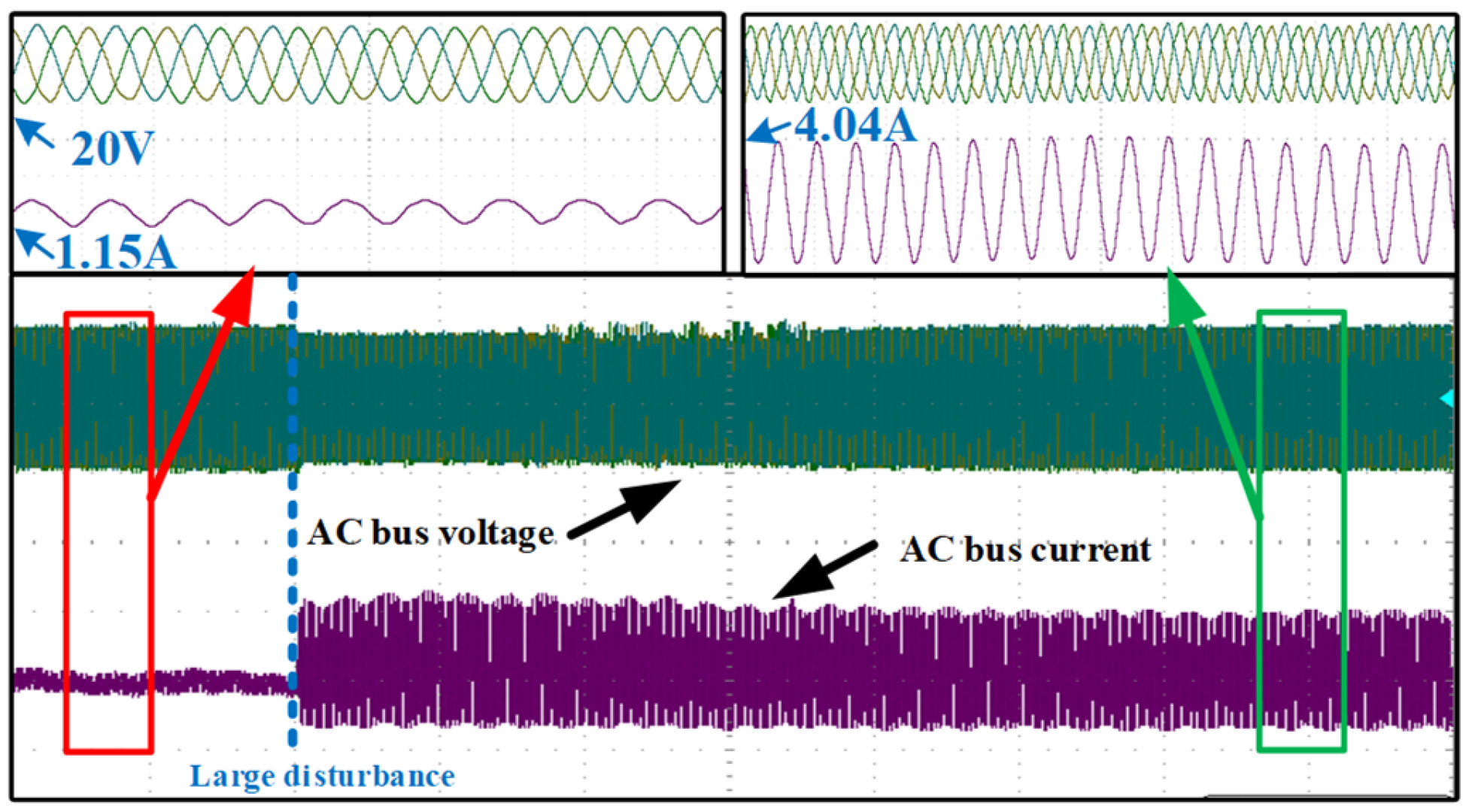
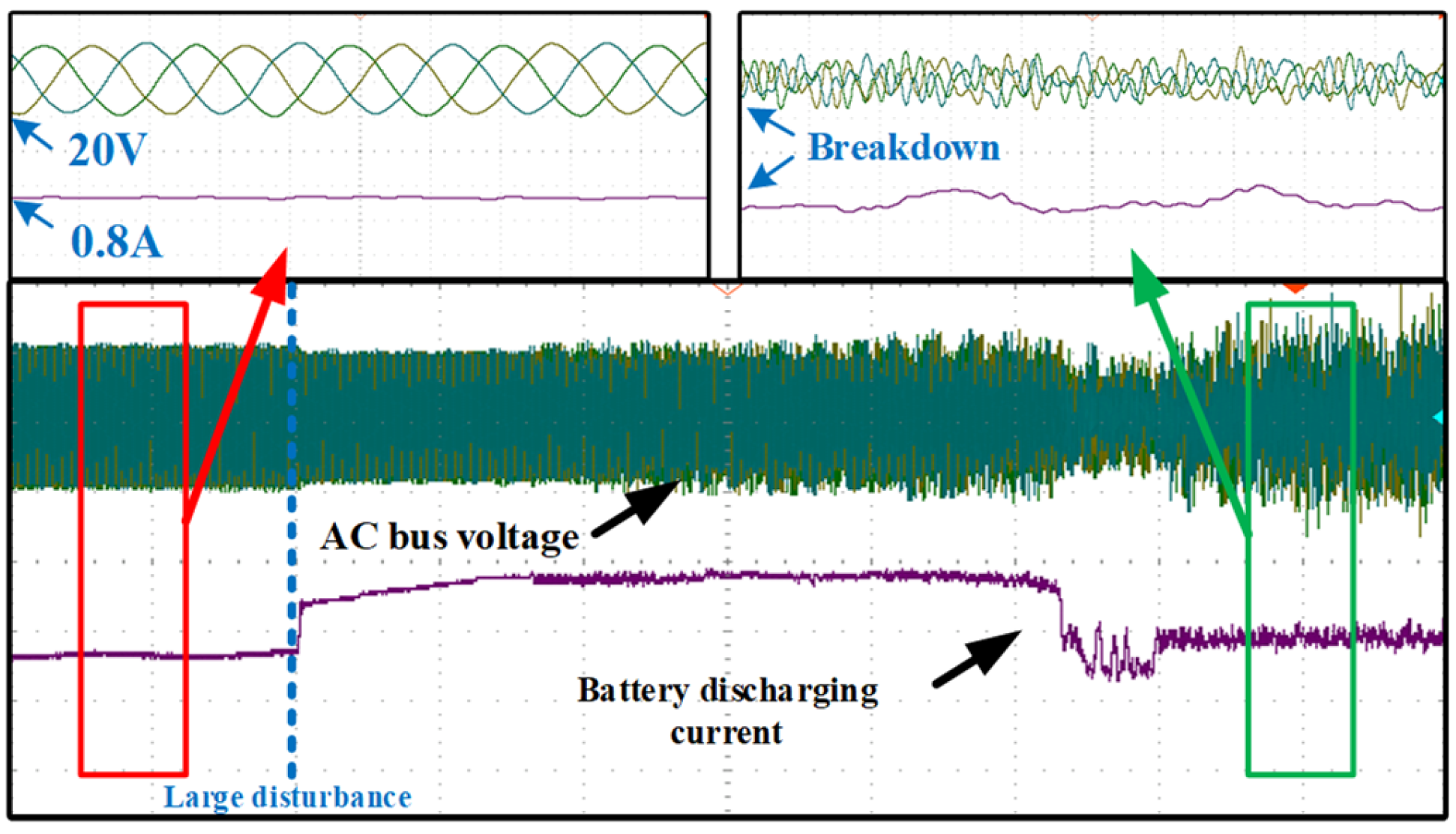
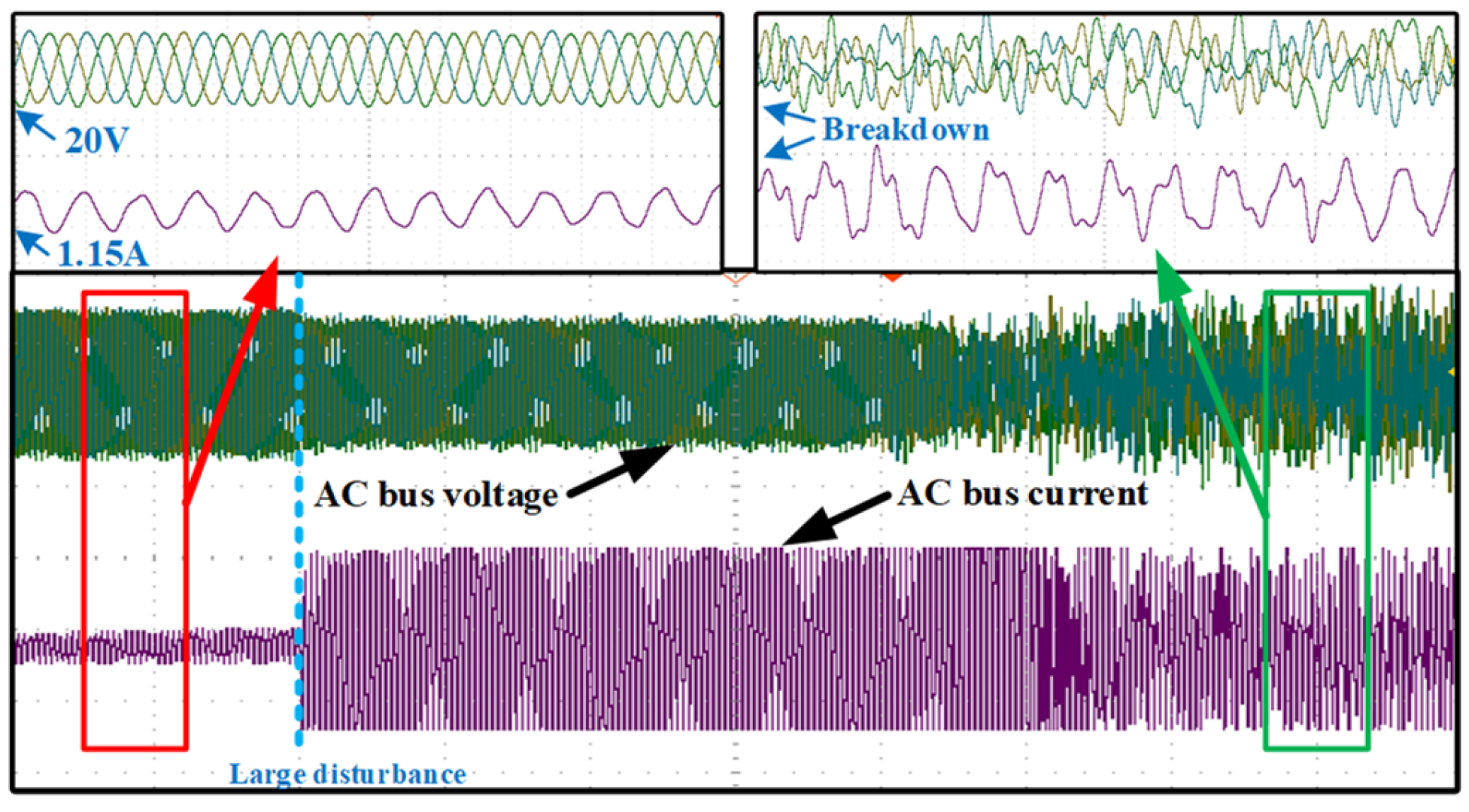
6.1. Discharging Stability Control Strategy Verification of Energy Storage Converters
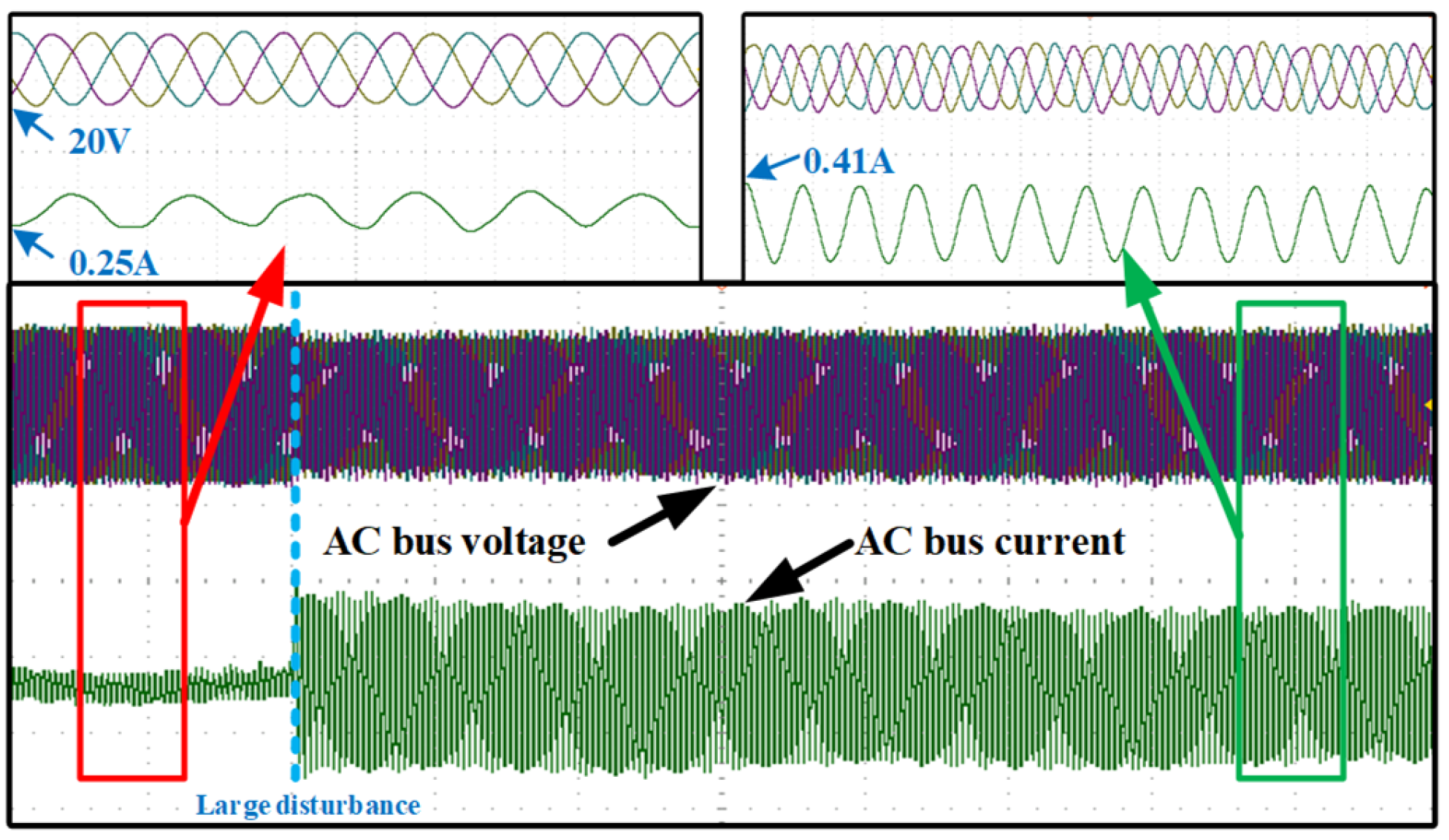
6.2. Charging Stability Control Strategy Verification of Energy Storage Converters
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sahoo, S.K.; Sinha, A.; Kishore, N. Control Techniques in AC, DC, and Hybrid AC–DC Microgrid: A Review. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 738–759. [Google Scholar] [CrossRef]
- Khayat, Y.; Shafiee, Q.; Heydari, R.; Naderi, M.; Dragicevic, T.; Simpson-Porco, J.W.; Dorfler, F.; Fathi, M.; Blaabjerg, F.; Guerrero, J.M. On the Secondary Control Architectures of AC Microgrids: An Overview. IEEE Trans. Power Electron. 2020, 35, 6482–6500. [Google Scholar] [CrossRef]
- Kabalan, M.; Singh, P.; Niebur, D. Large Signal Lyapunov-Based Stability Studies in Microgrids: A Review. IEEE Trans. Smart Grid 2017, 8, 2287–2295. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of Power Sharing Control Strategies for Islanding Operation of AC Microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, J.; Bao, W.; Zhao, Y. Infinity-Norm of Impedance-Based Stability Criterion for Three-Phase AC Distributed Power Systems with Constant Power Loads. IEEE Trans. Power Electron. 2015, 30, 3030–3043. [Google Scholar] [CrossRef]
- Xu, X.; Liu, Q.; Zhang, C.; Zeng, Z. Prescribed Performance Controller Design for DC Converter System with Constant Power Loads in DC Microgrid. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4339–4348. [Google Scholar] [CrossRef]
- Herrera, L.; Zhang, W.; Wang, J. Stability Analysis and Controller Design of DC Microgrids with Constant Power Loads. IEEE Trans. Smart Grid 2017, 8, 881–888. [Google Scholar]
- Matveev, A.S.; Machado, J.E.; Ortega, R.; Schiffer, J.; Pyrkin, A. A Tool for Analysis of Existence of Equilibria and Voltage Stability in Power Systems with Constant Power Loads. IEEE Trans. Autom. Control 2020, 65, 4726–4740. [Google Scholar] [CrossRef]
- Cesar, E.L.; Pagano, D.J.; Pou, J. Bifurcation Analysis of Parallel-Connected Voltage-Source Inverters with Constant Power Loads. IEEE Trans. Smart Grid 2018, 9, 5482–5493. [Google Scholar] [CrossRef]
- Xu, Q.; Jiang, W.; Blaabjerg, F.; Zhang, C.; Zhang, X.; Fernando, T. Backstepping Control for Large Signal Stability of High Boost Ratio Interleaved Converter Interfaced DC Microgrids with Constant Power Loads. IEEE Trans. Power Electron. 2020, 35, 5397–5407. [Google Scholar] [CrossRef]
- Sadabadi, M.S.; Shafiee, Q. Scalable Robust Voltage Control of DC Microgrids with Uncertain Constant Power Loads. IEEE Trans. Power Syst. 2020, 35, 508–515. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A Novel Composite Nonlinear Controller for Stabilization of Constant Power Load in DC Microgrid. IEEE Trans. Smart Grid 2019, 10, 752–761. [Google Scholar] [CrossRef]
- Vafamand, N.; Khooban, M.H.; Dragicevic, T.; Blaabjerg, F.; Boudjadar, J. Robust Non-Fragile Fuzzy Control of Uncertain DC Microgrids Feeding Constant Power Loads. IEEE Trans. Power Electron. 2019, 34, 11300–11308. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J. Stability Analysis and Parameters Optimization of Islanded Microgrid with Both Ideal and Dynamic Constant Power Loads. IEEE Trans. Ind. Electron. 2018, 65, 3263–3274. [Google Scholar] [CrossRef]
- Hossain, E.; Perez, R.; Nasiri, A.; Padmanaban, S. A Comprehensive Review on Constant Power Loads Compensation Techniques. IEEE Access 2018, 6, 33285–33305. [Google Scholar] [CrossRef]
- Liu, Q.; Caldognetto, T.; Buso, S. Review and Comparison of Grid-Tied Inverter Controllers in Microgrids. IEEE Trans. Power Electron. 2020, 35, 7624–7639. [Google Scholar] [CrossRef]
- Gupta, A.; Doolla, S.; Chatterjee, K. Hybrid AC–DC Microgrid: Systematic Evaluation of Control Strategies. IEEE Trans. Smart Grid 2018, 9, 3830–3843. [Google Scholar] [CrossRef]
- Areerak, K.; Sopapirm, T.; Bozhko, S.; Hill, C.I.; Suyapan, A.; Areerak, K. Adaptive Stabilization of Uncontrolled Rectifier Based AC–DC Power Systems Feeding Constant Power Loads. IEEE Trans. Power Electron. 2018, 33, 8927–8935. [Google Scholar] [CrossRef]
- Karimipour, D.; Salmasi, F. Stability Analysis of AC Microgrids with Constant Power Loads Based on Popov’s Absolute Stability Criterion. IEEE Trans. Circuits Syst. II Express Briefs 2015, 62, 696–700. [Google Scholar] [CrossRef]
- Sulligoi, G.; Bosich, D.; Giadrossi, G.; Zhu, L.; Cupelli, M.; Monti, A. Multiconverter Medium Voltage DC Power Systems on Ships: Constant-Power Loads Instability Solution Using Linearization via State Feedback Control. IEEE Trans. Smart Grid 2014, 5, 2543–2552. [Google Scholar] [CrossRef]
- Chang, F.; Cui, X.; Wang, M.; Su, W.; Huang, A.Q. Large-Signal Stability Criteria in DC Power Grids with Distributed-Controlled Converters and Constant Power Loads. IEEE Trans. Smart Grid 2020, 11, 5273–5287. [Google Scholar] [CrossRef]
- Lin, P.; Jiang, W.; Wang, J.; Shi, D.; Zhang, C.; Wang, P. Toward Large-Signal Stabilization of Floating Dual Boost Converter-Powered DC Microgrids Feeding Constant Power Loads. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 580–589. [Google Scholar] [CrossRef]
- El Aroudi, A.; Haroun, R.; Al-Numay, M.S.; Calvente, J.; Giral, R. Fast-Scale Stability Analysis of a DC–DC Boost Converter with a Constant Power Load. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 549–558. [Google Scholar] [CrossRef]
- Hassan, M.A.; He, Y. Constant Power Load Stabilization in DC Microgrid Systems Using Passivity-Based Control with Nonlinear Disturbance Observer. IEEE Access 2020, 8, 92393–92406. [Google Scholar] [CrossRef]
- Valinejad, J.; Marzband, M.; Korkali, M.; Xu, Y.; Al-Sumaiti, A.S. Coalition Formation of Microgrids with Distributed Energy Resources and Energy Storage in Energy Market. J. Mod. Power Syst. Clean Energy 2020, 8, 906–918. [Google Scholar] [CrossRef]
- Tian, L.; Cheng, L.; Guo, J.; Wu, K. System Modeling and Optimal Dispatching of Multi-energy Microgrid with Energy Storage. J. Mod. Power Syst. Clean Energy 2020, 8, 809–819. [Google Scholar] [CrossRef]
- Weiss, L.; Mathis, W.; Trajkovic, L. A generalization of Brayton-Moser’s mixed potential function. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1998, 45, 423–427. [Google Scholar] [CrossRef]
- Xu, J.; Hu, Y.; Qian, H.; Xie, S. Delay-Based Phase-Locked Loop Parameters Design Based on Stability Region of Grid-Connected Single-Phase Inverter Under Grid Voltage Sags. IEEE Trans. Ind. Electron. 2022, 69, 11324–11334. [Google Scholar] [CrossRef]
- Rao, T.S.M.; Anuradha, T.; Kaur, U.; Rajan, M.S.; Patnala, T.R.; Kumar, V.R. Machine Learning for the Assessment of Transient Stability of Power Systems. In Proceedings of the 2022 6th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 25–27 May 2022; pp. 1238–1242. [Google Scholar]
- Mourinho, F.A.; Assis, T.M.L. A new approach to retrofit plans for distributed energy resources to mitigate adverse impacts on bulk power systems stability. IEEE Lat. Am. Trans. 2022, 20, 669–676. [Google Scholar] [CrossRef]
- Spanias, C.; Aristidou, P.; Michaelides, M. A Passivity-Based Framework for Stability Analysis and Control Including Power Network Dynamics. IEEE Syst. J. 2021, 15, 5000–5010. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, Y.; Enrique, T.R.; Zhe, C. Effect of Reactive Power Characteristic of Offshore Wind Power Plant on Low-Frequency Stability. IEEE Trans. Energy Convers. 2020. [Google Scholar] [CrossRef]
- Alsakati, A.A.; Vaithilingam, C.A.; Alnasseir, J.; Jagadeeshwaran, A. Transient Stability Improvement of Power System using Power System Stabilizer Integrated with Excitation System. In Proceedings of the 2021 11th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 27–28 August 2021; pp. 34–39. [Google Scholar] [CrossRef]
- Plesnick, S.; Singh, P. A New Impedance-based Relative Stability Criterion for DC Power Systems. In Proceedings of the 2020 52nd North American Power Symposium (NAPS), Tempe, AZ, USA, 11–13 April 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Liang, Y.L.; Li, K.J.; Ma, Z.; Lee, W.J. Typical Fault Cause Recognition of Single-Phase-to-Ground Fault for Overhead Lines in Nonsolidly Earthed Distribution Networks. In IEEE Transactions on Industry Applications; IEEE: Piscataway, NJ, USA, 2020; Volume 56, pp. 6298–6306. [Google Scholar]
- Li, Y.; Tang, G.; Ge, J.; He, Z.; Pang, H.; Yang, J.; Wu, Y. Modeling and damping control of modular multilevel converter based DC grid. IEEE Trans. Power Syst. 2018, 33, 723–735. [Google Scholar] [CrossRef]
- Amin, M.; Molinas, M.; Lyu, J.; Cai, X. Impact of Power Flow Direction on the Stability of VSC-HVDC Seen From the Impedance Nyquist Plot. IEEE Trans. Power Electron. 2017, 32, 8204–8217. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| AC bus voltage—Vs | 311 V |
| DC-DC converter high voltage—vdc | 650 V |
| Battery voltage—vb | 430 V |
| AC side filter inductor—Ls | 0.0007 H |
| AC side filter capacitor—Cs | 100 μF |
| DC side capacitor—Cdc | 800 μF |
| DC-AC converter voltage outer loop proportional link coefficient—kvp | 10 |
| DC-AC converter voltage outer loop integral link coefficient—kvi | 100 |
| DC-AC converter current outer loop proportional link coefficient—kip | 0.1 |
| DC-AC converter current outer loop integral link coefficient—kii | 100 |
| Sag coefficient-m,n | , |
| Output power of PV unit—PG | 30 kW |
| Initial power of AC constant power load—P1 | 1–22.5 kW |
| Resistive load power—Pr | 20 kW |
| Group | A | B |
|---|---|---|
| Outer voltage loop control parameters in discharging state—kp(d) | 1 | 0.5 |
| Outer voltage loop control parameters in charging state—kp(c) | 1 | |
| Power steps of AC CPL | 1–22.5 kW | |
| Following stability control strategy | YES | NO |
| Parameters | Value |
|---|---|
| AC side filter capacitor—Cs | 3 × 10−4 F |
| AC side filter inductor—Ls | 2.5 × 10−3 H |
| AC side filter inductor equivalent resistance—Rs | 0.318 Ω |
| Micro source output power—PG | 40 W |
| Battery current—i2 | 2.5 A |
| DC side capacitor—Cdc | 2 × 10−4 F |
| Voltage of DC side capacitor—vdc | 60 V |
| Battery voltage—vb | 50 V |
| Battery output power—Pb | 125 W |
| Group | A | B |
|---|---|---|
| Outer voltage loop control parameters in discharging state—kp(d) | 0.1 | 4 |
| Power steps of AC CPL | 20–120 W | |
| Following stability control strategy | YES | NO |
| Group | C | D |
|---|---|---|
| Outer voltage loop control parameters in discharging state kp(c) | 0.1 | 1.35 |
| Power steps of AC CPL | 20–87 W | |
| Following stability control strategy | YES | NO |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Wang, S.; Song, X.; Zhou, J. Stability Control Strategies for Bidirectional Energy Storage Converters Considering AC Constant Power Loads. Electronics 2023, 12, 1067. https://doi.org/10.3390/electronics12041067
Liu X, Wang S, Song X, Zhou J. Stability Control Strategies for Bidirectional Energy Storage Converters Considering AC Constant Power Loads. Electronics. 2023; 12(4):1067. https://doi.org/10.3390/electronics12041067
Chicago/Turabian StyleLiu, Xinbo, Shi Wang, Xiaotong Song, and Jinghua Zhou. 2023. "Stability Control Strategies for Bidirectional Energy Storage Converters Considering AC Constant Power Loads" Electronics 12, no. 4: 1067. https://doi.org/10.3390/electronics12041067
APA StyleLiu, X., Wang, S., Song, X., & Zhou, J. (2023). Stability Control Strategies for Bidirectional Energy Storage Converters Considering AC Constant Power Loads. Electronics, 12(4), 1067. https://doi.org/10.3390/electronics12041067