
Photonic Multiple Microwave Frequency Measurement System with Single-Branch Detection Based on Polarization Interference



Abstract
1. Introduction
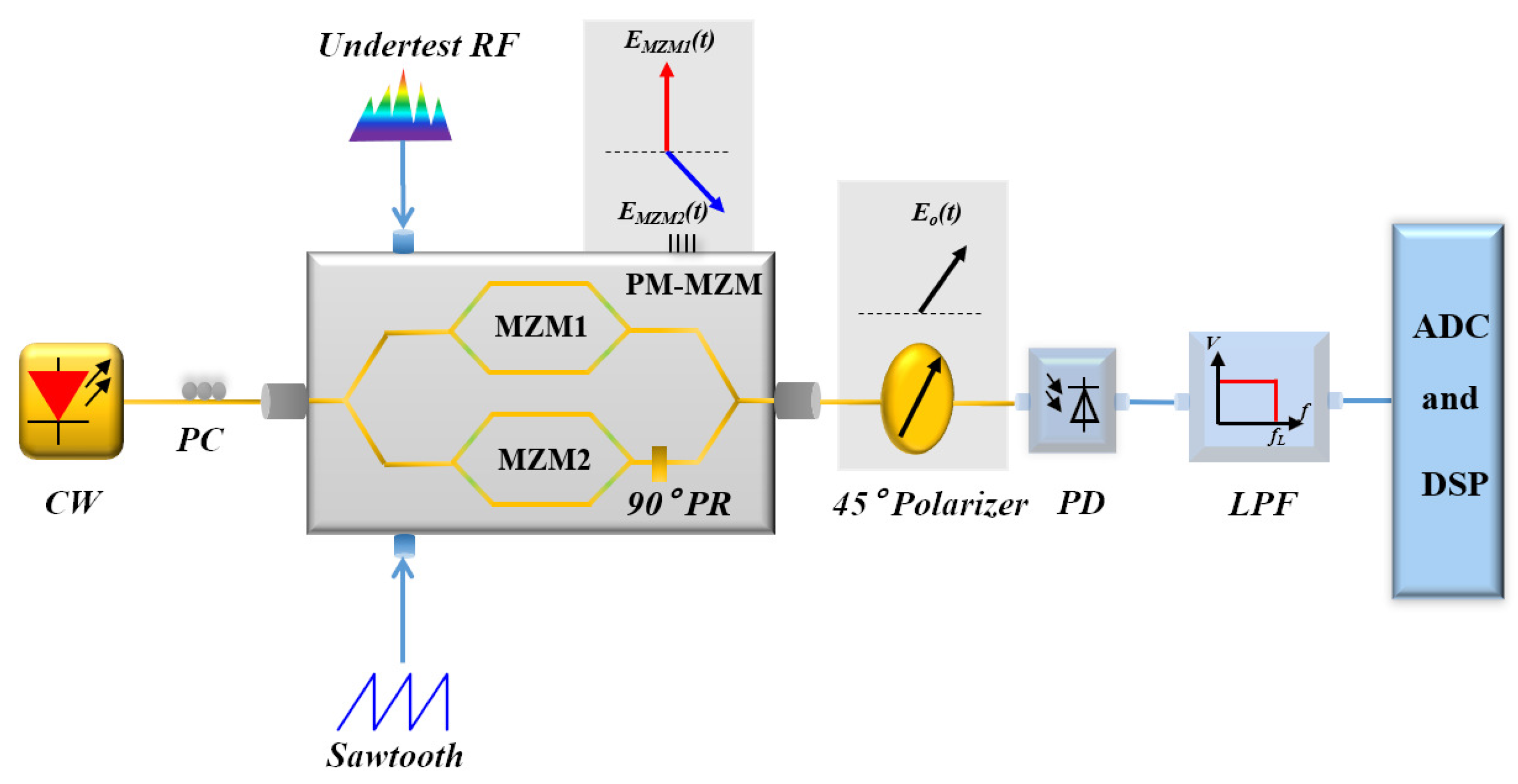
2. Theory and Principle
3. Simulation and Verification
4. Discussion
4.1. Performance Comparison
4.2. Frequency Ambiguity
4.3. Polarization Angle Drift
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Spezio, A. Electronic warfare systems. IEEE Trans. Microw. Theory Tech. 2002, 50, 633–644. [Google Scholar] [CrossRef]
- Capmany, J.; Mora, J.; Gasulla, I.; Sancho, J.; Lloret, J.; Sales, S. Microwave Photonic Signal Processing. J. Light. Technol. 2013, 31, 571–586. [Google Scholar] [CrossRef]
- Yao, J.; Capmany, J. Microwave photonics. Sci. China-Inf. Sci. 2022, 65, 1–64. [Google Scholar] [CrossRef]
- Li, J.; Pei, L.; Ning, T.; Zheng, J.; Li, Y.; He, R. Measurement of Instantaneous Microwave Frequency by Optical Power Monitoring Based on Polarization Interference. J. Light. Technol. 2020, 38, 2285–2291. [Google Scholar] [CrossRef]
- Zhang, H.; Zheng, P.; Yang, H.; Hu, G.; Yun, B.; Cui, Y. A Microwave Frequency Measurement System Based on Si3N4 Ring-Assisted Mach-Zehnder Interferometer. IEEE Photonics J. 2020, 12, 7102213. [Google Scholar] [CrossRef]
- Chen, H.; Huang, C.; Chan, E.H.W. Photonics-Based Instantaneous Microwave Frequency Measurement System with Improved Resolution and Robust Performance. IEEE Photonics J. 2022, 14, 5856008. [Google Scholar] [CrossRef]
- Wang, S.; Wu, G.; Sun, Y.; Chen, J. Photonic compressive receiver for multiple microwave frequency measurement. Opt. Express 2019, 27, 25364–25374. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhou, F.; Gao, D.; Wei, Y.; Xiao, X.; Yu, S.; Dong, J.; Zhang, X. Wideband adaptive microwave frequency identification using an integrated silicon photonic scanning filter. Photonics Res. 2019, 7, 172–181. [Google Scholar] [CrossRef]
- Xie, X.; Dai, Y.; Ji, Y.; Xu, K.; Li, Y.; Wu, J.; Lin, J. Broadband Photonic Radio-Frequency Channelization Based on a 39-GHz Optical Frequency Comb. IEEE Photonics Technol. Lett. 2012, 24, 661–663. [Google Scholar] [CrossRef]
- Winnall, S.; Lindsay, A.; Austin, M.; Canning, J.; Mitchell, A. A microwave channelizer and spectroscope based on an integrated optical Bragg-grating Fabry-Perot and integrated hybrid fresnel lens system. IEEE Trans. Microw. Theory Tech. 2006, 54, 868–872. [Google Scholar] [CrossRef]
- Wei, Y.; Wang, X.; Miao, Y.; Chen, J.; Wang, X.; Gong, C. Measurement and analysis of instantaneous microwave frequency based on an optical frequency comb. Appl. Opt. 2022, 61, 6834–6840. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Guo, Y.; Wu, S. Frequency measurement of microwave signals in a wide frequency range based on an optical frequency comb and channelization method. Appl. Opt. 2022, 61, 3663–3670. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Pan, W.; Zou, X.; Bai, W.; Li, P.; Yan, L.; Teng, C. Wideband and Ambiguous-Free RF Channelizer Assisted Jointly by Spacing and Profile of Optical Frequency Comb. IEEE Photonics J. 2020, 12, 5500911. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Error (MHz) | Measurement Range (GHz) | Single-Branch Detection | Real Time | Multi-Tone Measurement | |
|---|---|---|---|---|---|
| Ref. [4] | ≤200 | 4.4–8.5 4.4–8.7 | No | Yes | No |
| Ref. [5] | ≤0.03 * ≤0.102 * ≤0.037 * | 10.5–15.7 24–35 5–39 | No | Yes | No |
| Ref. [6] | ≤270 | 8–18 | No | Yes | No |
| Ref. [7] | ≤88 | 0.6–42 | Yes | No | Yes |
| Ref. [8] | ≤273.3 | 1-30 | Yes | No | Yes |
| Ref. [9] | - | 0–19.5 8–10 | No | Yes | Yes |
| Ref. [10] | - | 1–23 | No | Yes | Yes |
| Ref. [11] | ≤500 | 0.5–13.5 13.5–26.5 26.5–39.5 | No | Yes | Yes |
| Ref. [12] | - | 0.1–50 | No | Yes | Yes |
| Ref. [13] | ≤2 | 1–40 | No | Yes | Yes |
| This work | ≤2 | 0.1–12 | Yes | Yes | Yes |
| Situation | Cases | ||
|---|---|---|---|
| Single-tone RF Measurement | |||
| Multi-tone RF Measurement | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Li, J.; Yan, M.; Pei, L.; Ning, T.; Zheng, J.; Wang, J. Photonic Multiple Microwave Frequency Measurement System with Single-Branch Detection Based on Polarization Interference. Electronics 2023, 12, 455. https://doi.org/10.3390/electronics12020455
Zhu W, Li J, Yan M, Pei L, Ning T, Zheng J, Wang J. Photonic Multiple Microwave Frequency Measurement System with Single-Branch Detection Based on Polarization Interference. Electronics. 2023; 12(2):455. https://doi.org/10.3390/electronics12020455
Chicago/Turabian StyleZhu, Wei, Jing Li, Miaoxia Yan, Li Pei, Tigang Ning, Jingjing Zheng, and Jianshuai Wang. 2023. "Photonic Multiple Microwave Frequency Measurement System with Single-Branch Detection Based on Polarization Interference" Electronics 12, no. 2: 455. https://doi.org/10.3390/electronics12020455
APA StyleZhu, W., Li, J., Yan, M., Pei, L., Ning, T., Zheng, J., & Wang, J. (2023). Photonic Multiple Microwave Frequency Measurement System with Single-Branch Detection Based on Polarization Interference. Electronics, 12(2), 455. https://doi.org/10.3390/electronics12020455