
Potential of Low-Cost Light Detection and Ranging (LiDAR) Sensors: Case Studies for Enhancing Visitor Experience at a Science Museum


Abstract
1. Introduction
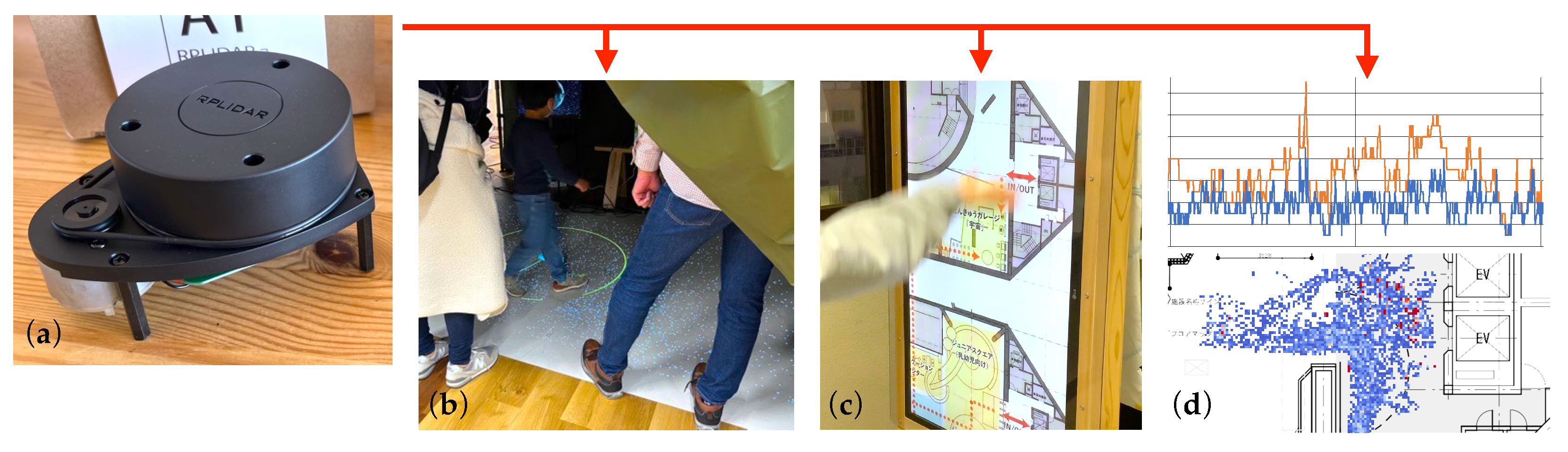
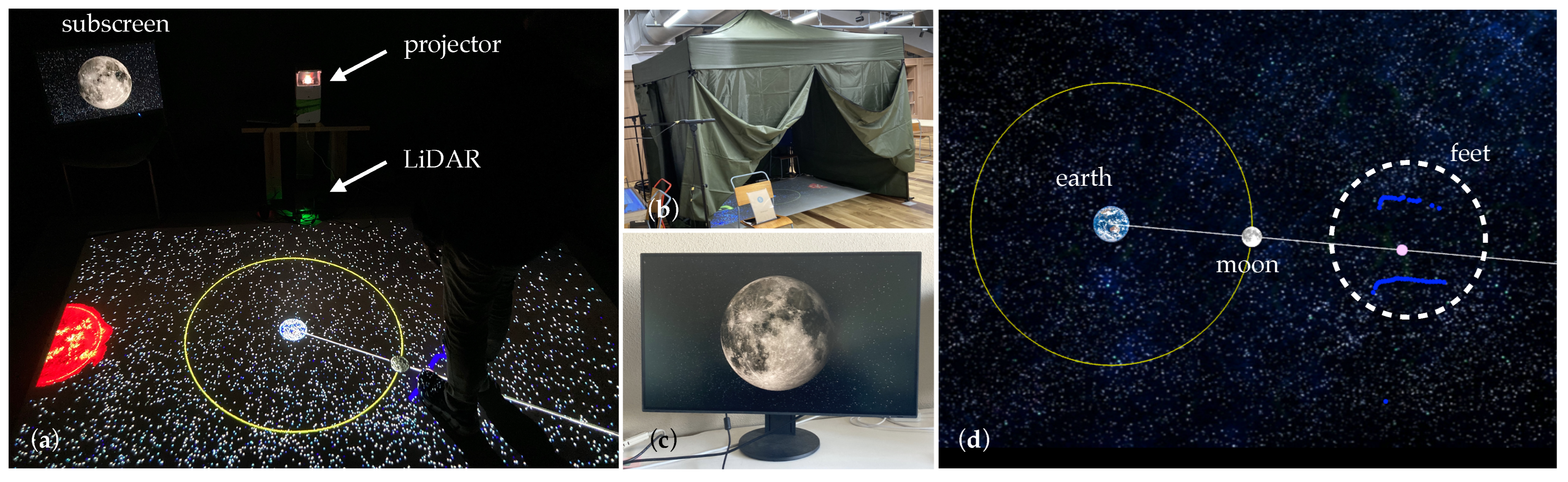
- A floor projection was implemented to interact with users through a single low-cost LiDAR sensor (Section 4). The application which was designed to learn about the phases of the Moon received a high evaluation of 4.2 on a scale of 1–5 from 32 users (Section 4.2).
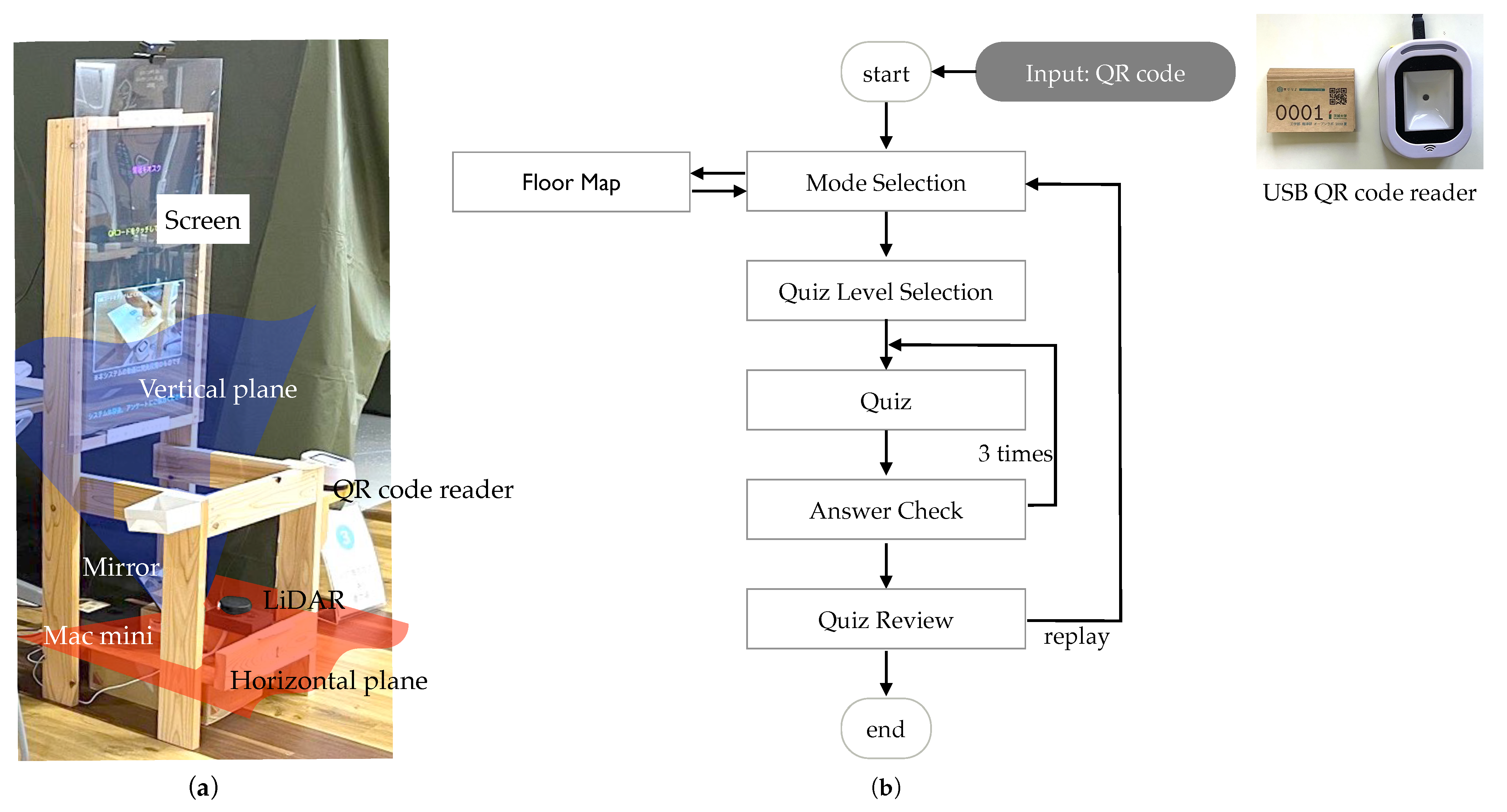
- An information kiosk was also proposed with touchless operations and visitor tracking. As detailed in Section 5, both functions were implemented using a single LiDAR device with a mirror reflecting a portion of the detection plane of the 2D LiDAR. The kiosk provided a high accuracy rate in counting visitors when being idle without any interaction with visitors (Section 5.2).
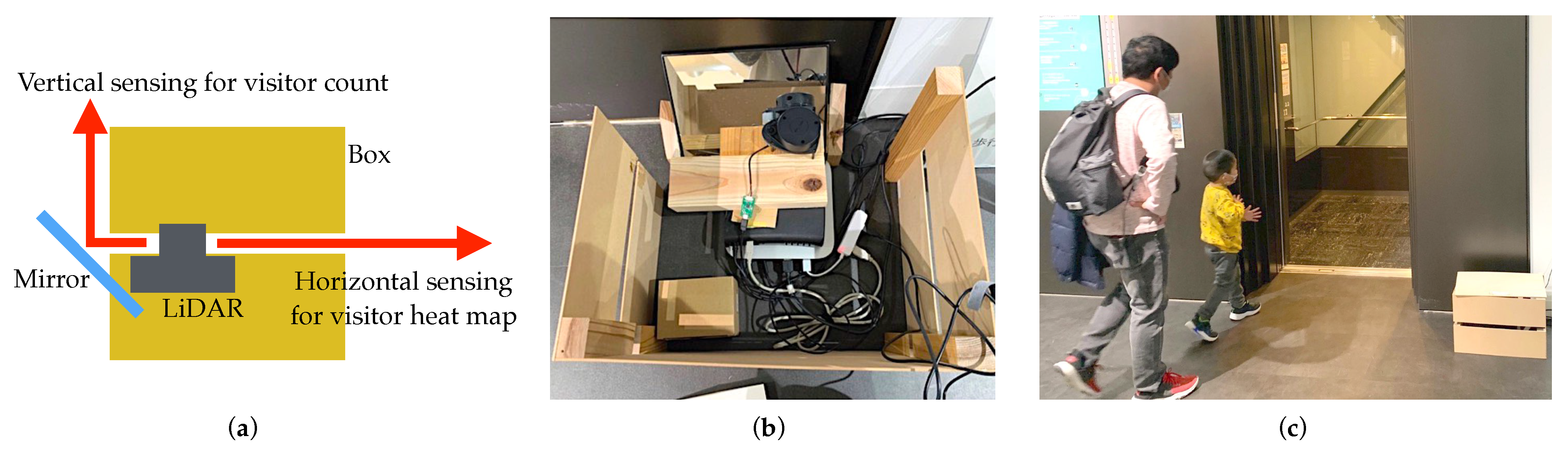
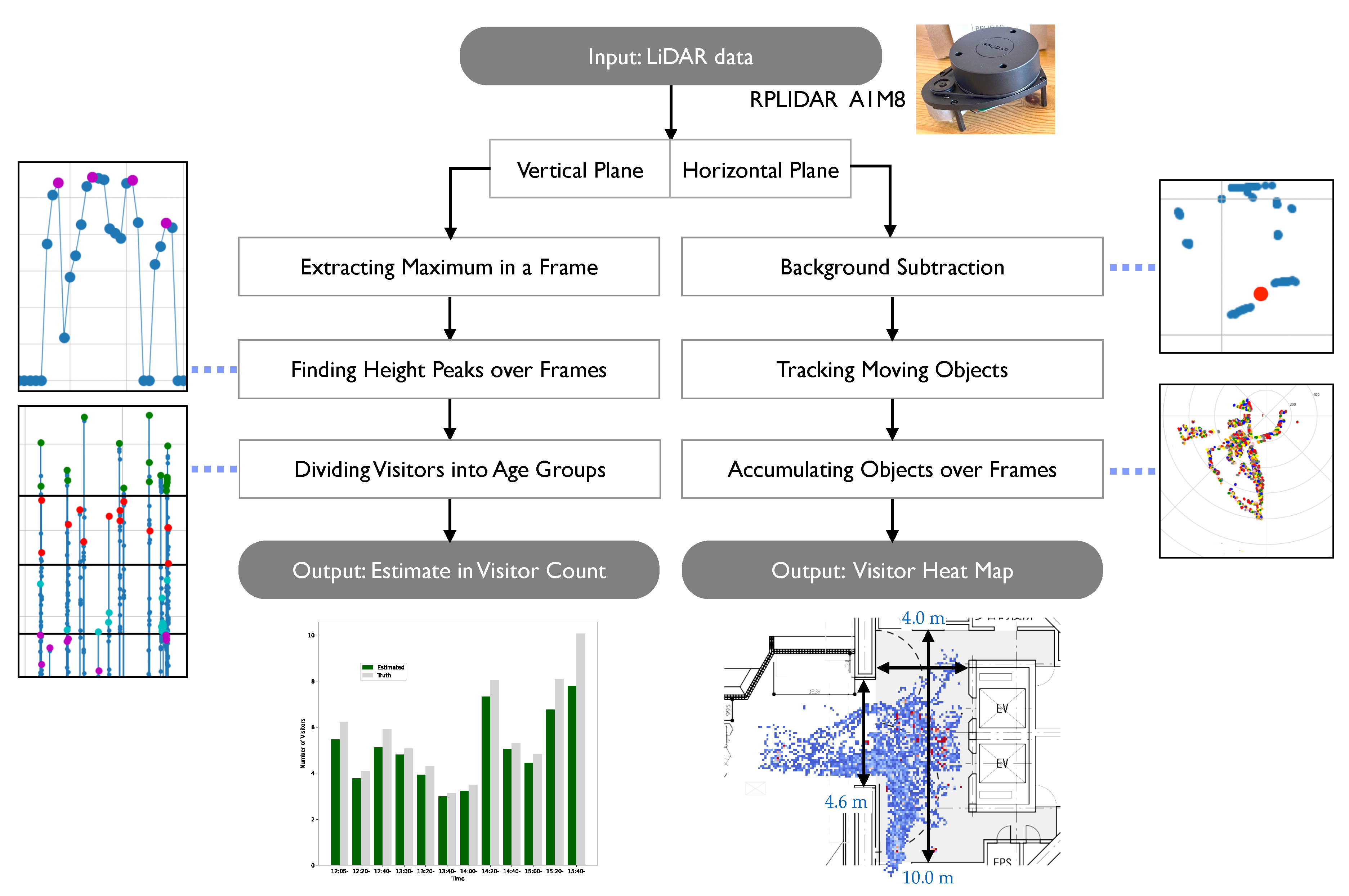
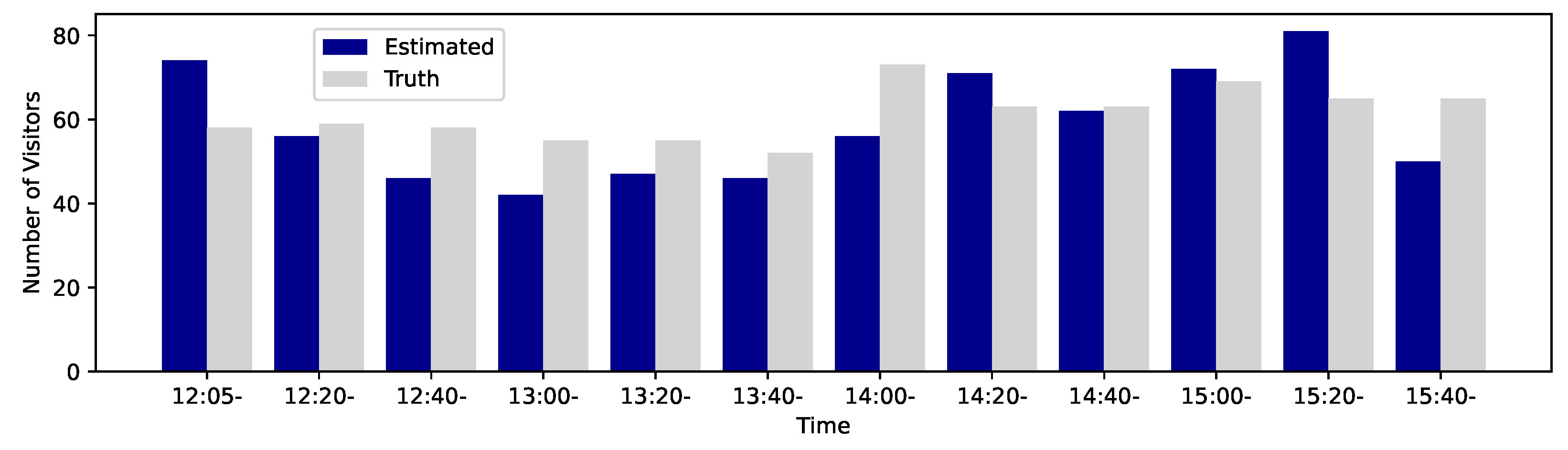
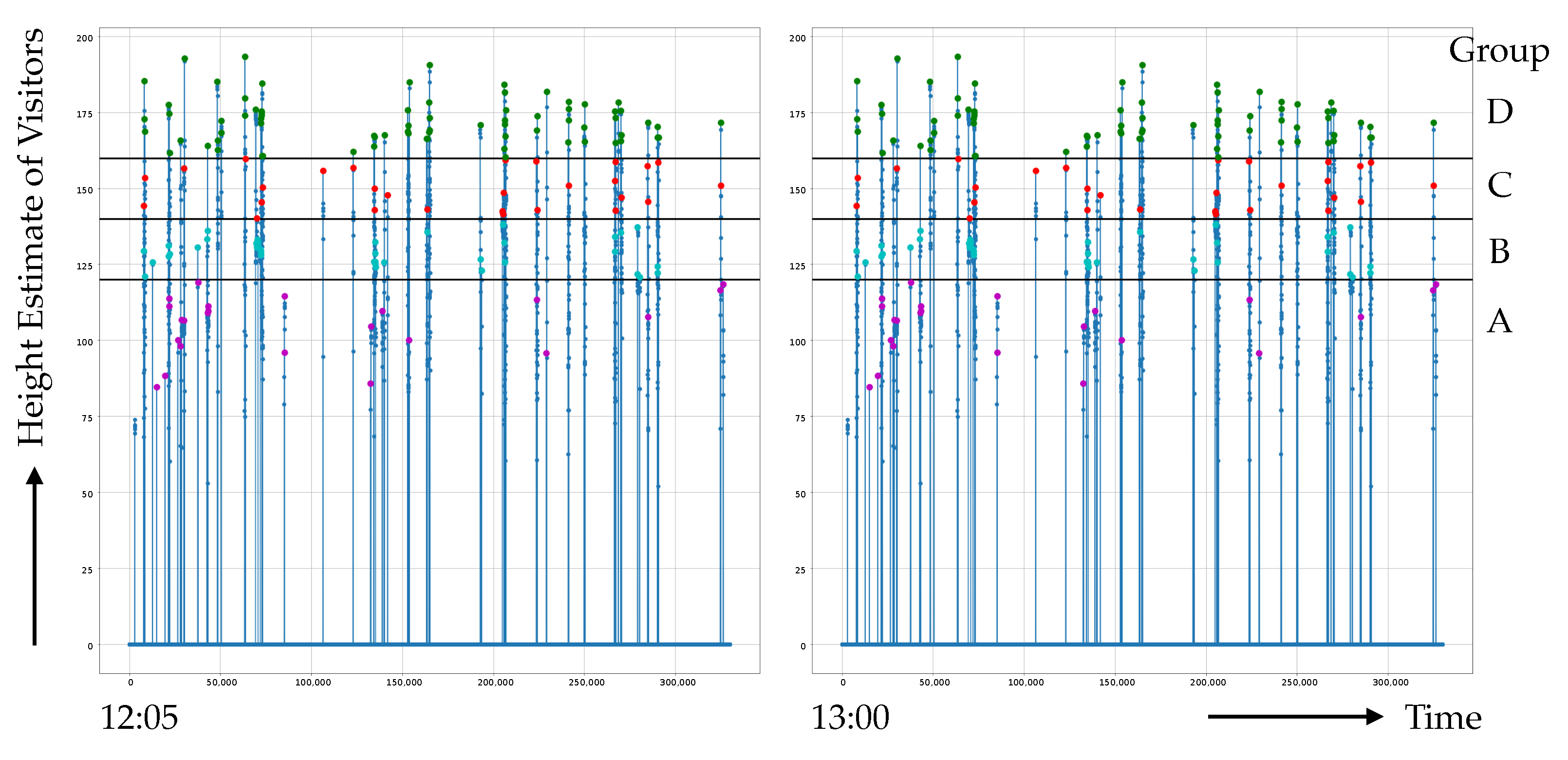
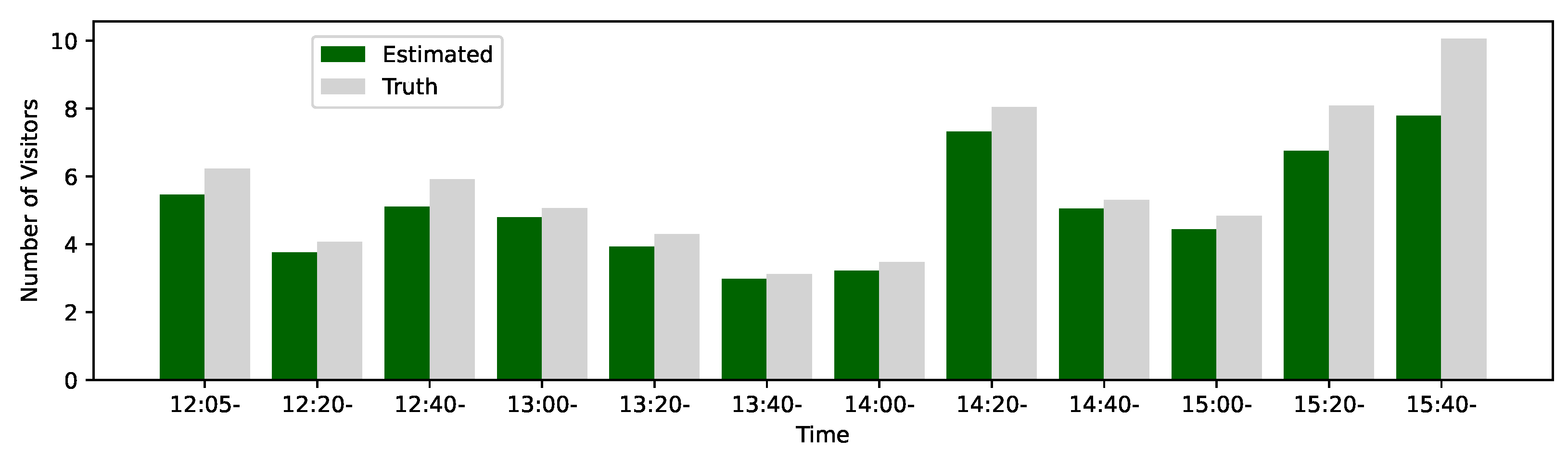
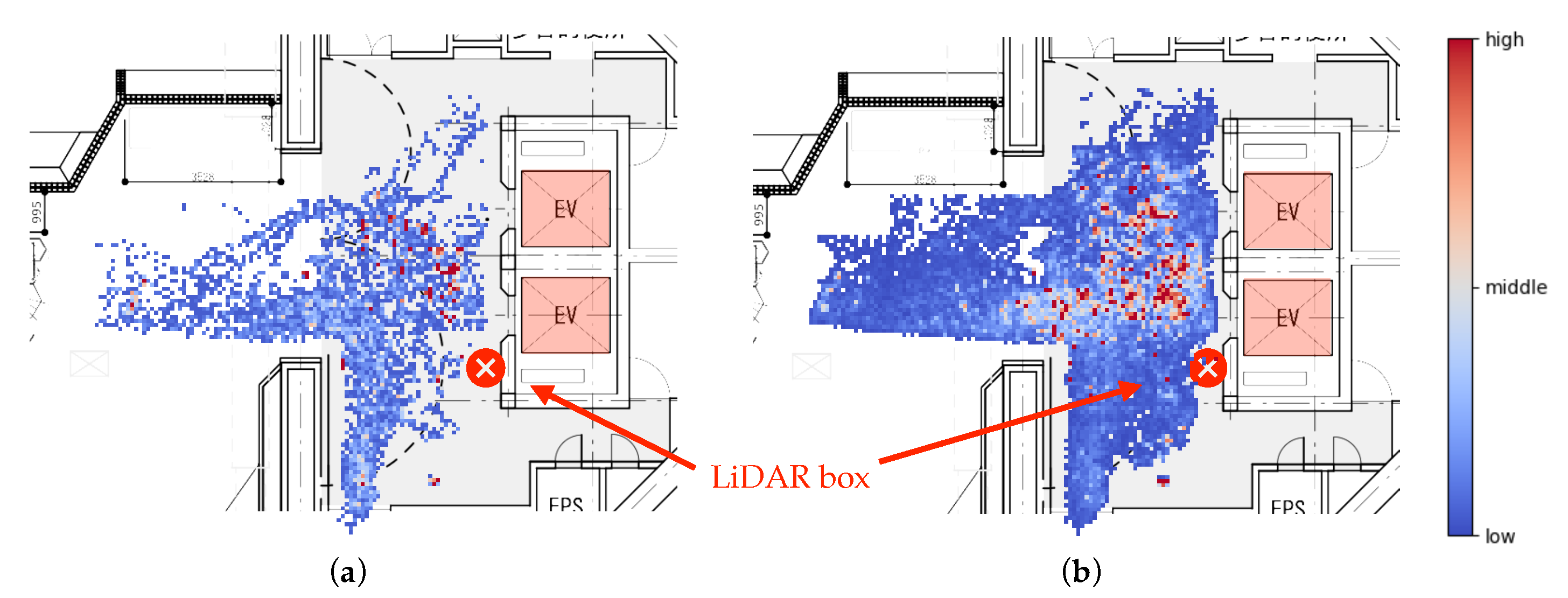
- A LiDAR box (Section 6) with vertical and horizontal scanning was developed to count visitors (85.3% accuracy), whereby visitor heat maps were generated (Section 6.4).
- Personalization, which provides every visitor with a unique experience;
- Interactivity, which brings exhibits to life to ignite visitor interest;
- Review, which provides visitors with the opportunity to reflect on their current visit.
2. Related Work
2.1. LiDAR Applications at Museums
2.2. User Interface for Museum Exhibits
2.3. Visitor Tracking at Museums
3. Case Studies on LiDAR Applications
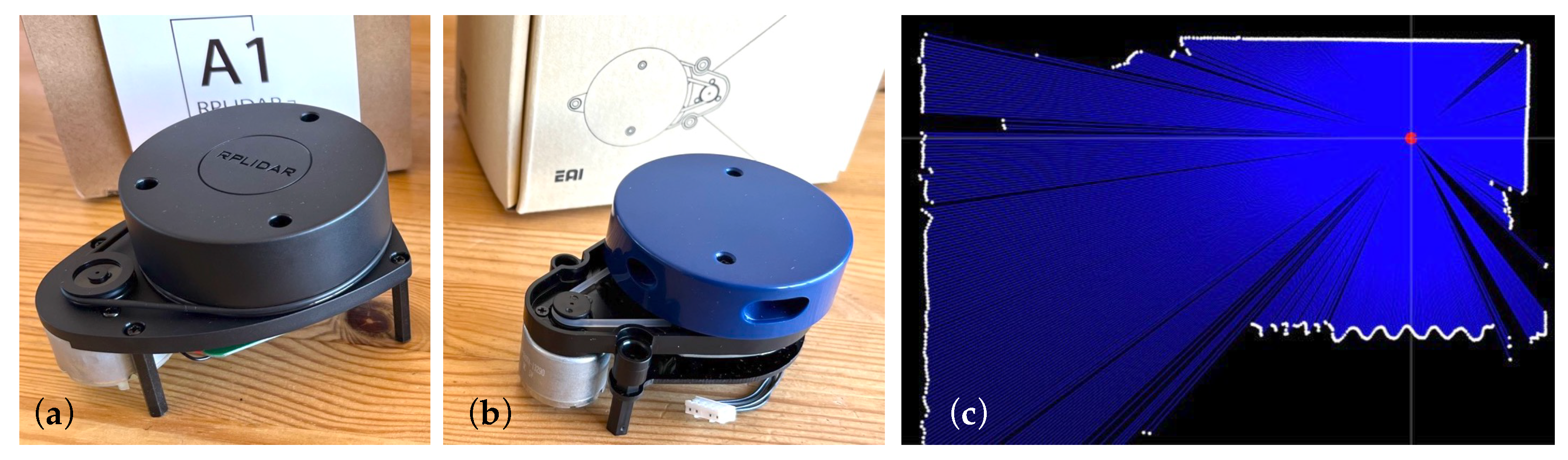
3.1. LiDAR Sensors
- A much wider viewing angle than those of cameras;
- Less concern over privacy issues raised by cameras recording the appearance of visitors;
- Low data density, making it more feasible to collect long-term records.
3.2. Experimental Setting of Case Studies
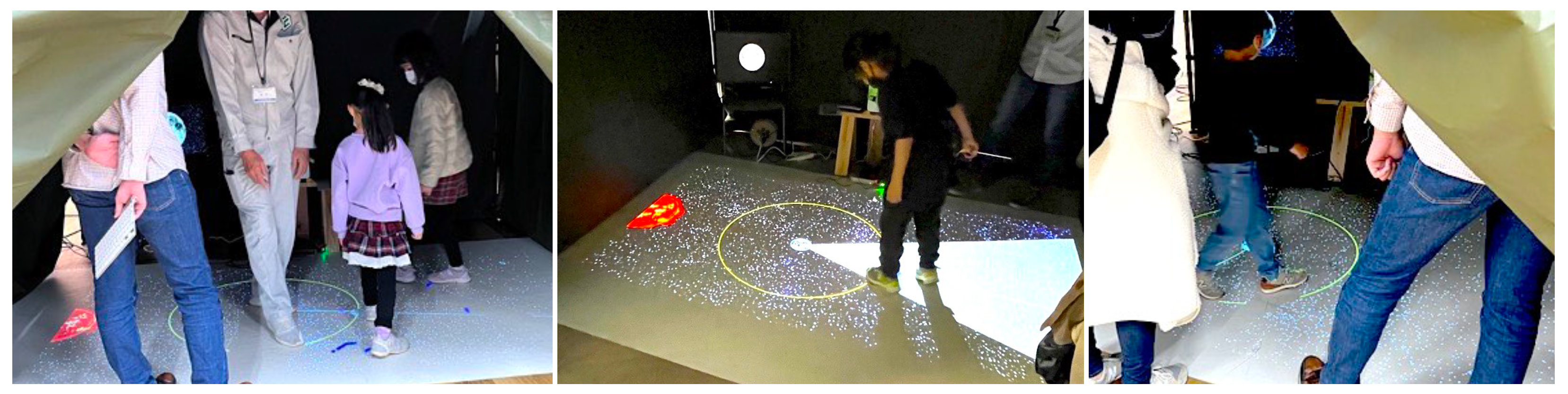
4. Case 1: Interactive Floor Projection to Learn about the Phases of the Moon
4.1. Application Design
4.2. User Study
5. Case 2: Versatile Information Kiosk with Touchless Interactions
- Multiple functions with fewer museum staff. Examples include floor guides, visitor membership services, and multilingual assistance. Wayfinding is particularly useful in large museums. Kiosks are more cost effective than hiring staff, whereby staff members can focus on basic and essential tasks to add value to the museum.
- Active learning experience offered to visitors. A kiosk is more attractive than ordinary static exhibits at a museum because visitors can interact with it and test their understanding by answering the questions displayed on the screen.
- Visitor data collection at a low cost. Using a visitor personalization method, such as a membership card, museum application software, or a paper ticket with a unique QR code, the staff can perform visitor analytics on the information collected from kiosks deployed at this museum.
- Floor plans;
- Interactive content such as quizzes;
- More detailed and specific information on a particular topic.
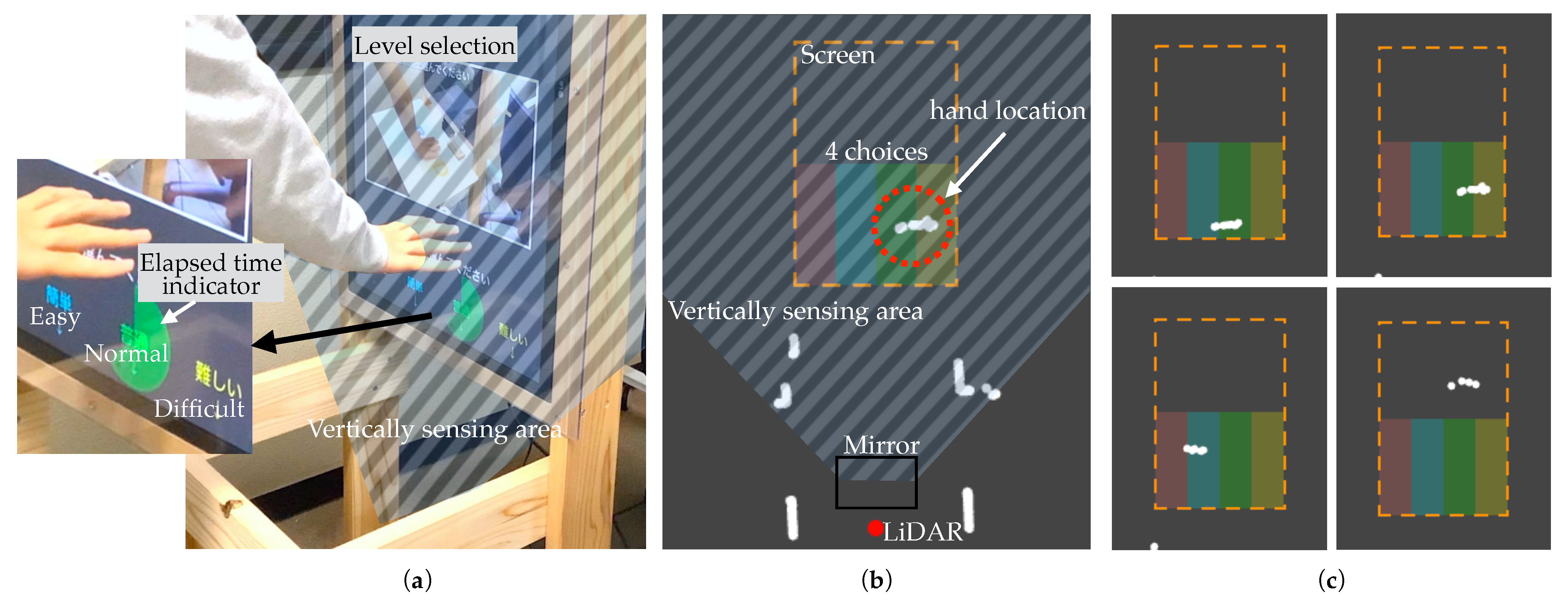
5.1. System Overview
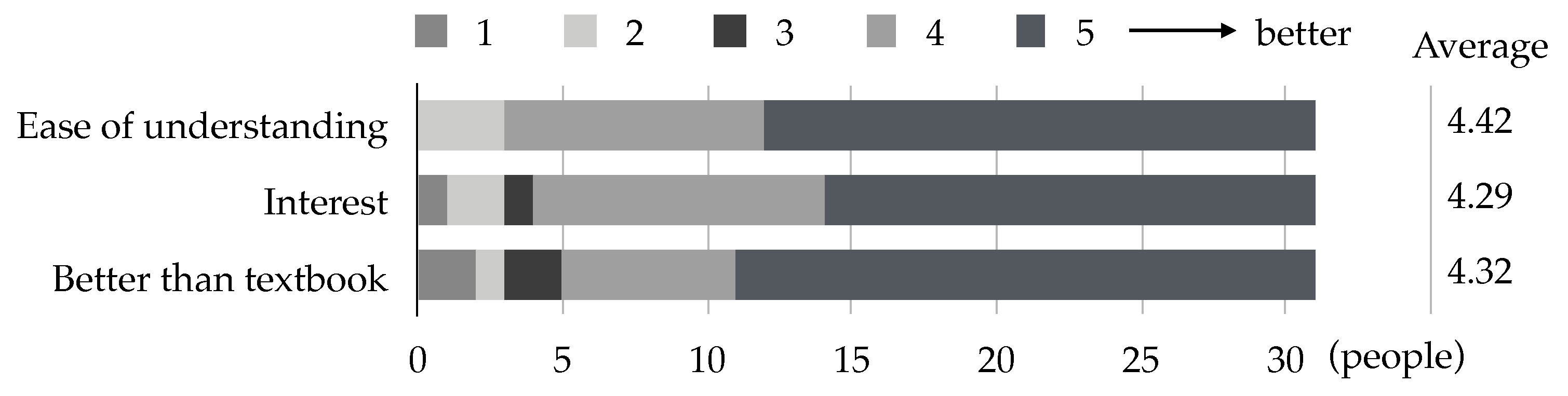
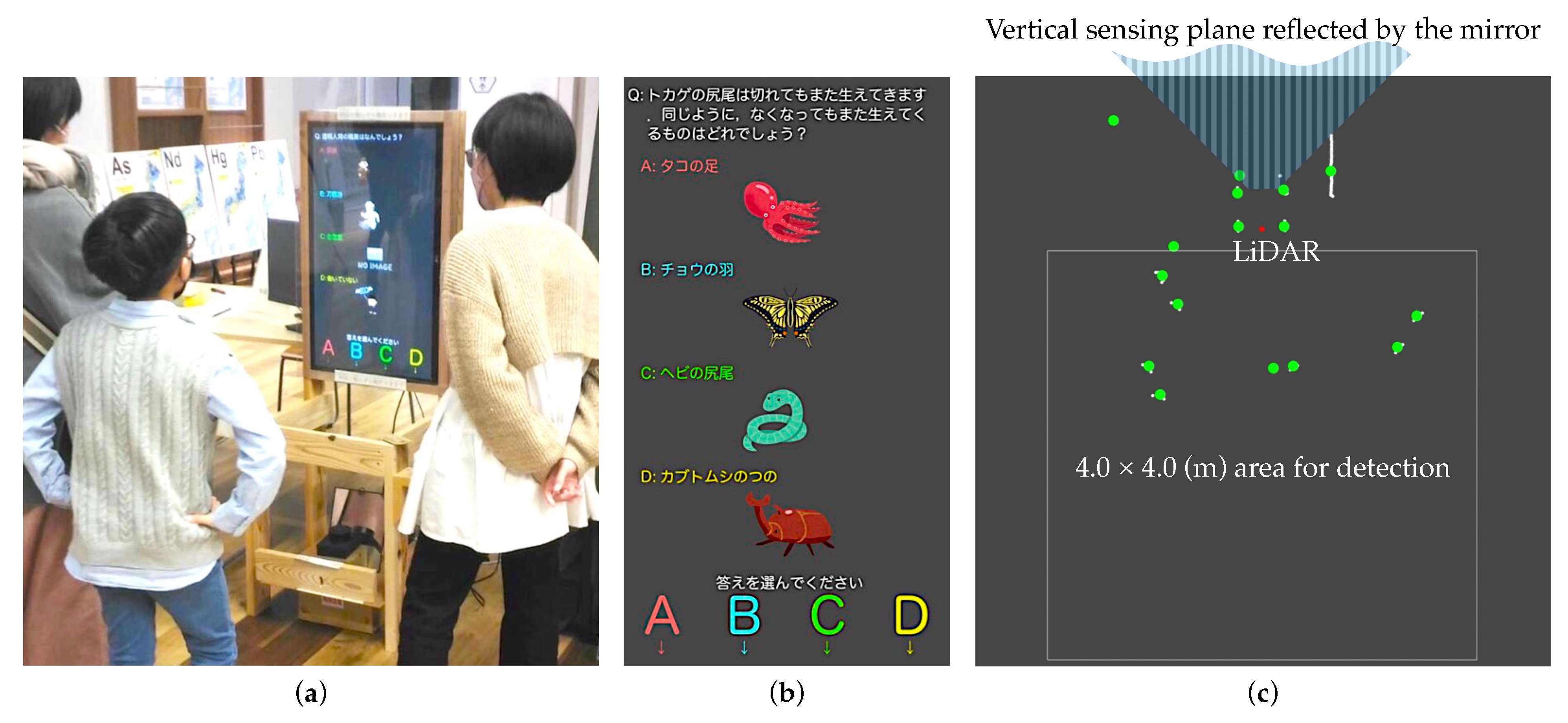
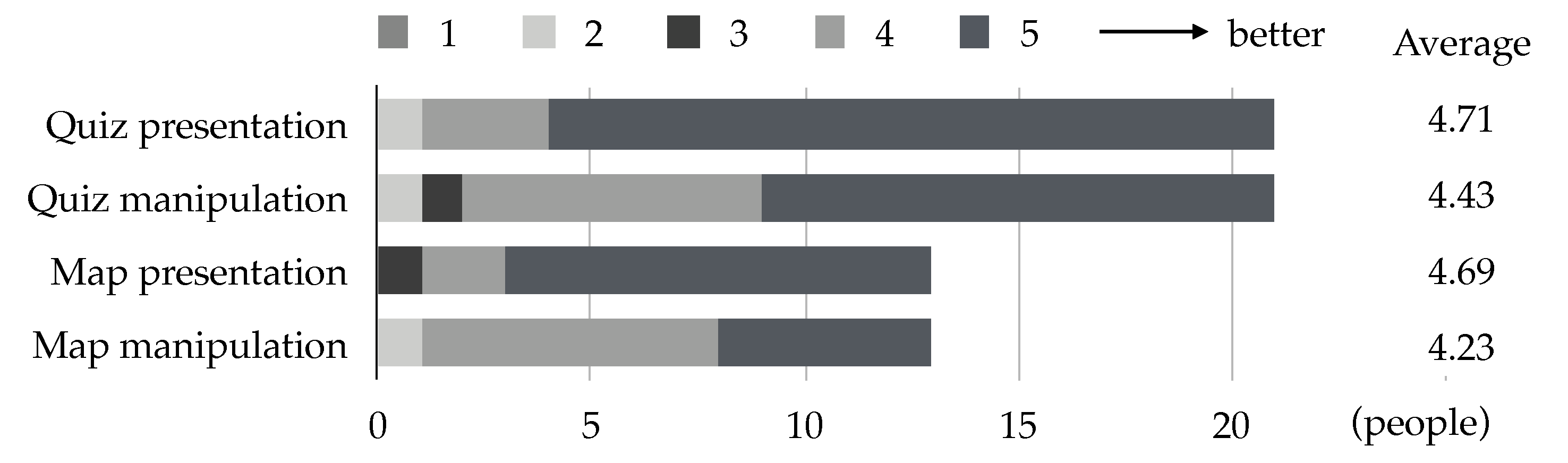
5.2. User Studies
6. Case 3: Visitor Tracking with Horizontal and Vertical Sensing
6.1. System Design
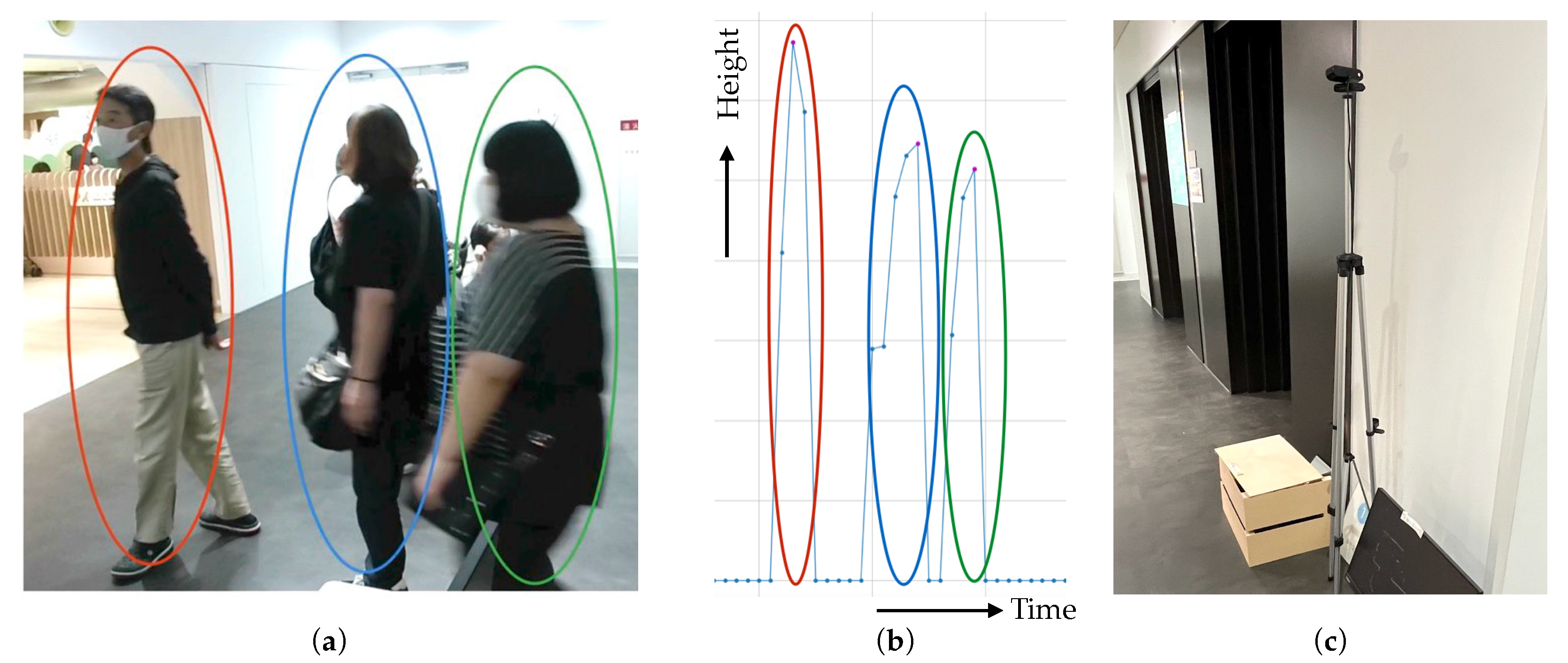
6.2. Vertical Measurement for Visitor Counting
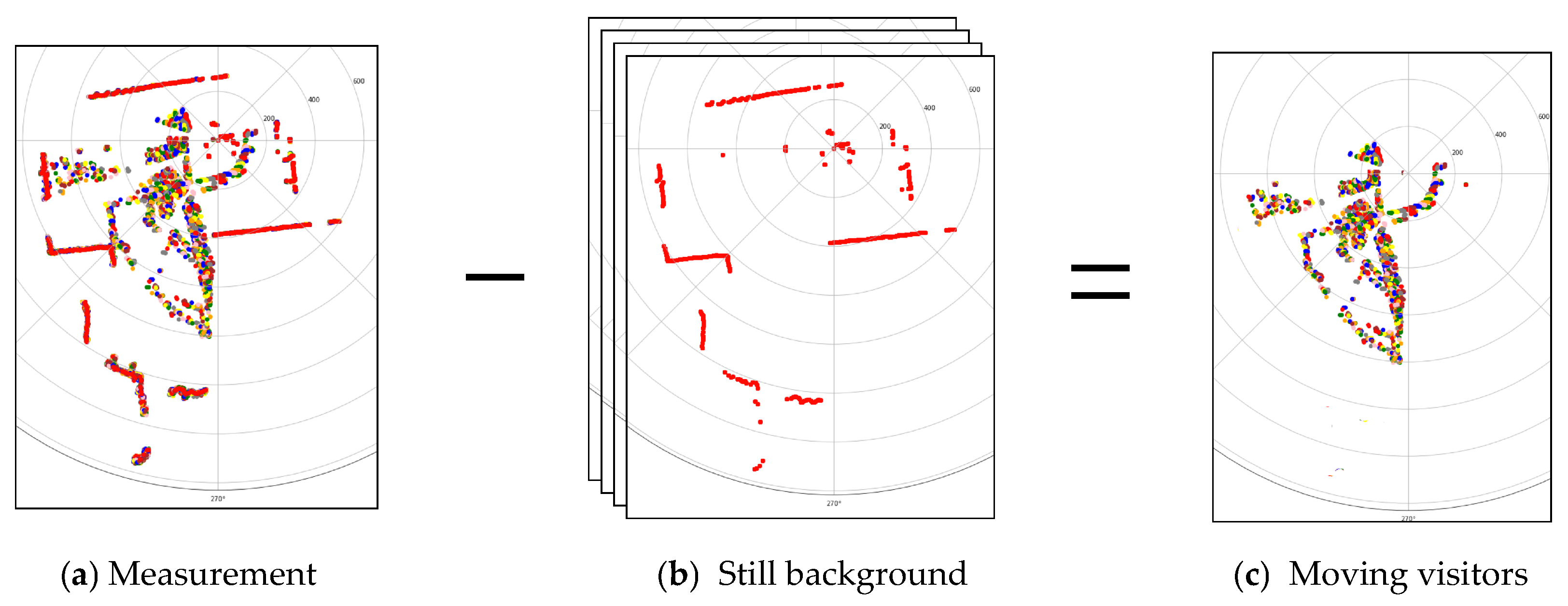
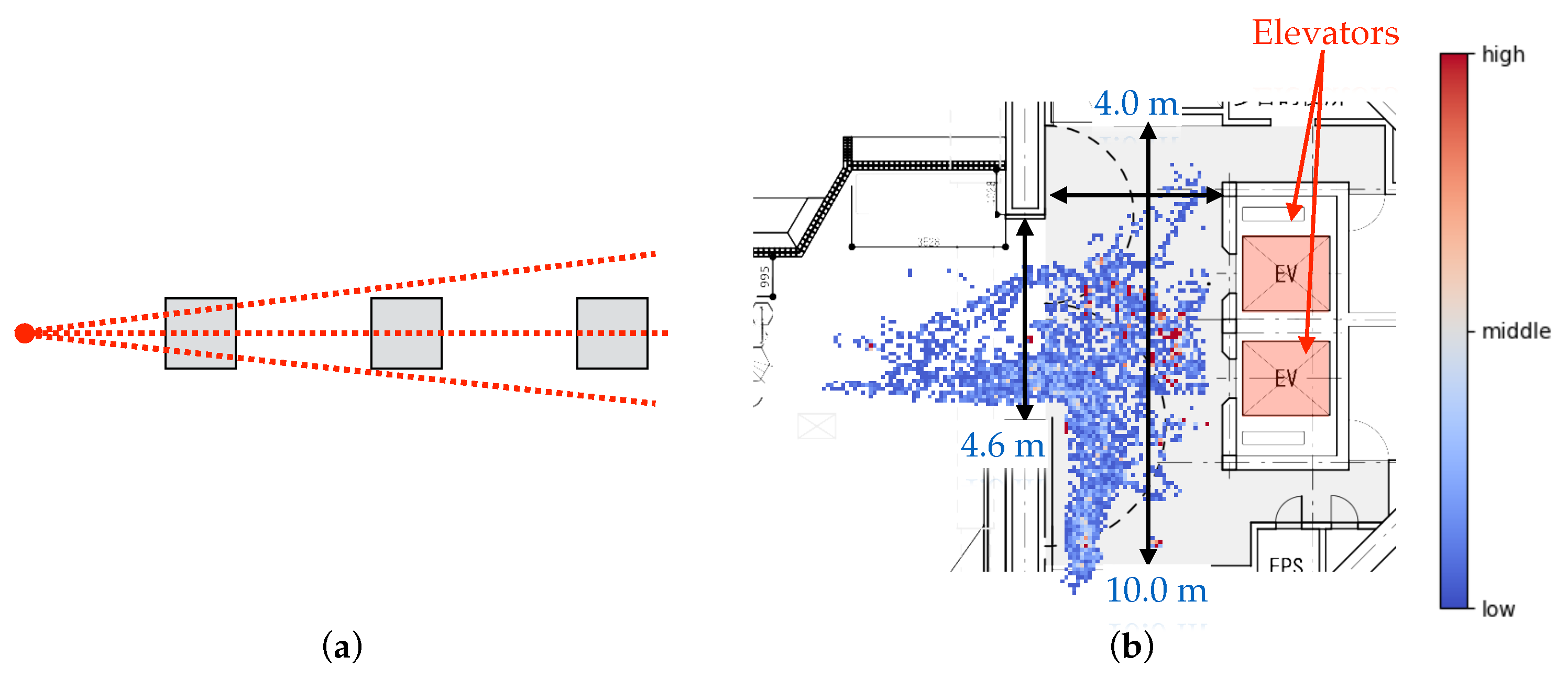
6.3. Horizontal Measurement for Visitor Tracking
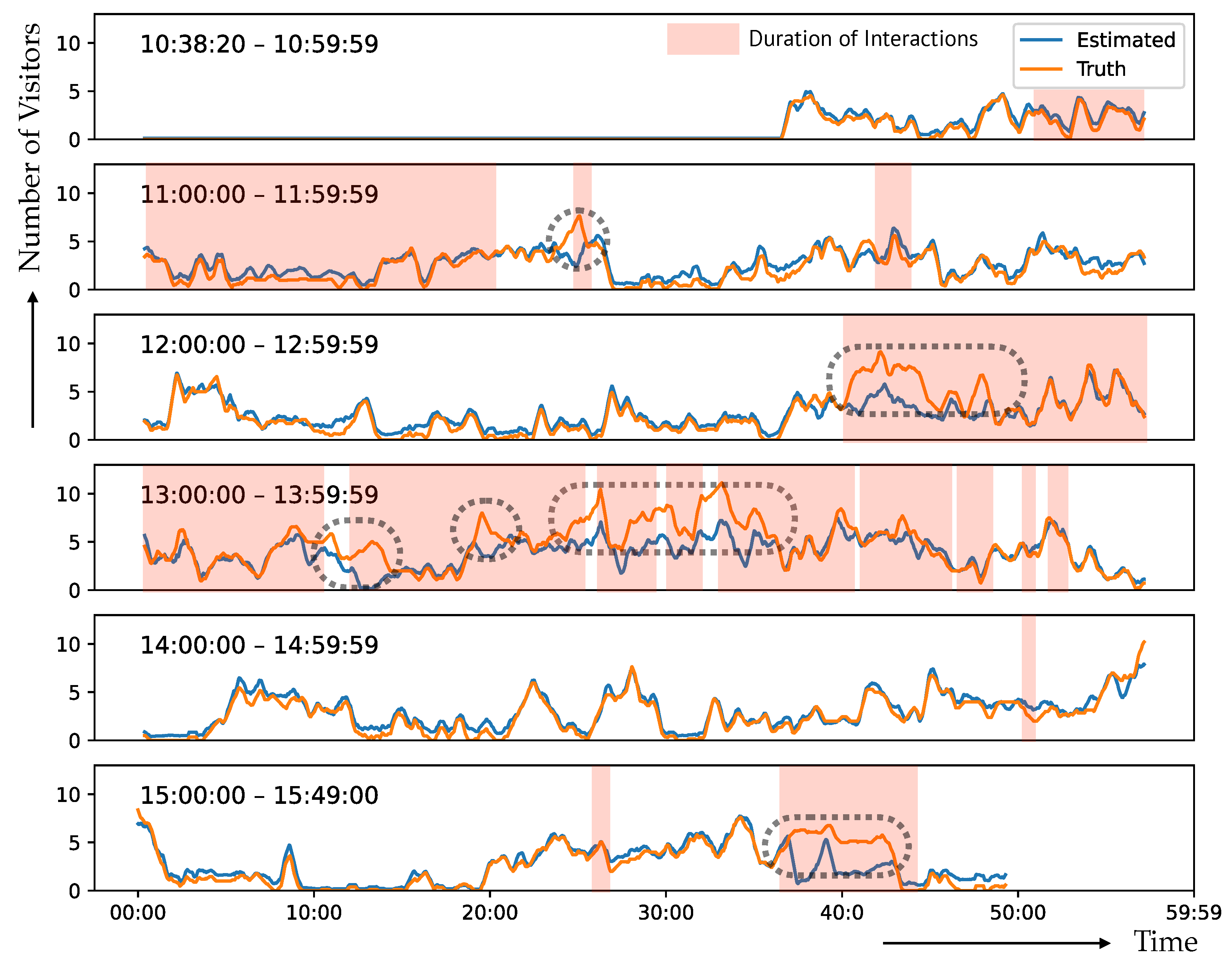
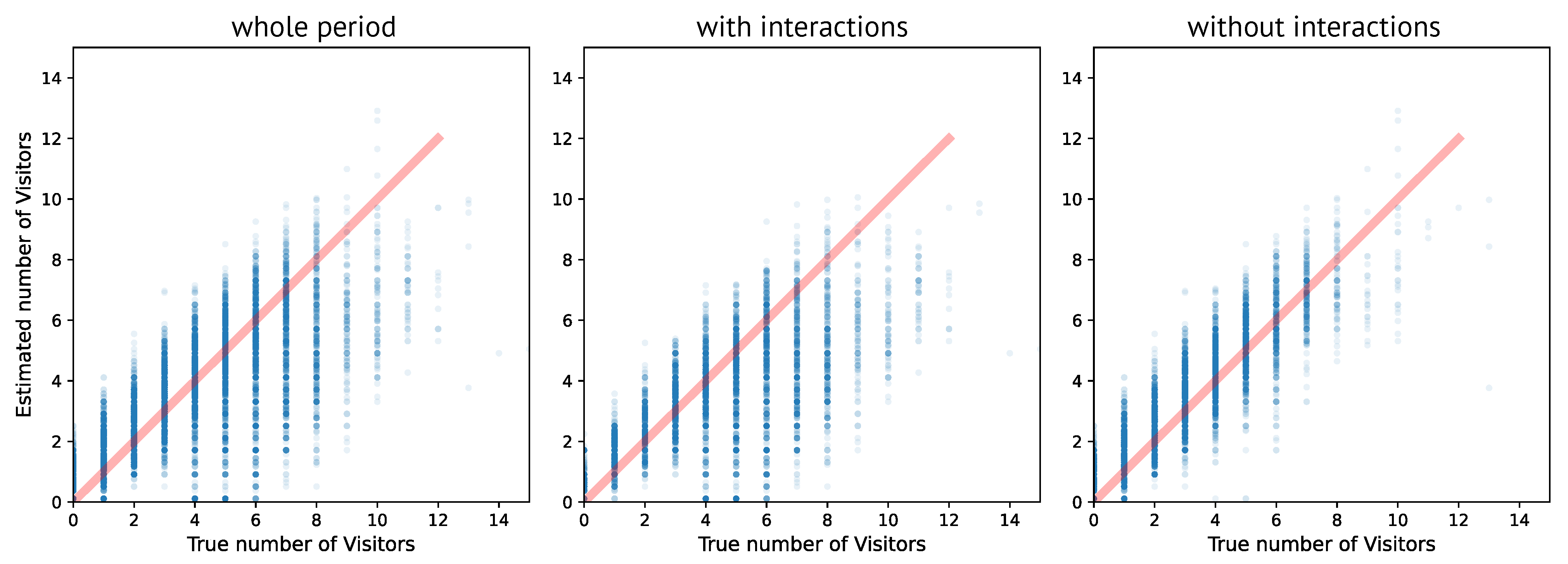
6.4. Evaluation Experiments
6.5. Discussion
7. Summary
7.1. Conclusions
7.2. Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FPS | Frames per second |
| HMD | Head-mounted display |
| IR | Infrared |
| LiDAR | Light detection and ranging |
| RFID | Radio frequency identification |
| ToF | Time of flight |
| UI | User interface |
| USB | Universal serial bus |
| VR | Virtual Reality |
References
- SICK. Using 2D Laser Scanners to Protect Larger Objects or Multiple Objects in a Museum. Available online: https://www.sick.com/ch/en/industries/building-safety-and-security/indoor-safety-and-security/object-surveillance/using-2d-laser-scanners-to-protect-larger-objects-or-multiple-objects-in-a-museum/c/p394352 (accessed on 18 July 2023).
- Rozsa, Z.; Sziranyi, T. Object Detection From a Few LIDAR Scanning Planes. IEEE Trans. Intell. Veh. 2019, 4, 548–560. [Google Scholar] [CrossRef]
- Yang, S.; Li, B.; Liu, M.; Lai, Y.K.; Kobbelt, L.; Hu, S.M. HeteroFusion: Dense Scene Reconstruction Integrating Multi-Sensors. IEEE Trans. Vis. Comput. Graph. 2020, 26, 3217–3230. [Google Scholar] [CrossRef] [PubMed]
- Chase, A.S.Z.; Chase, D.Z.; Chase, A.F. LiDAR for Archaeological Research and the Study of Historical Landscapes. In Sensing the Past 16; Masini, N., Soldovieri, F., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 89–100. [Google Scholar]
- Guyot, A.; Hubert-Moy, L.; Lorho, T. Detecting Neolithic Burial Mounds from LiDAR-Derived Elevation Data Using a Multi-Scale Approach and Machine Learning Techniques. Remote Sens. 2018, 10, 225. [Google Scholar] [CrossRef]
- Albrecht, C.M.; Fisher, C.; Freitag, M.; Hamann, H.F.; Pankanti, S.; Pezzutti, F.; Rossi, F. Learning and Recognizing Archeological Features from LiDAR Data. In Proceedings of the IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 5630–5636. [Google Scholar]
- Apollonio, F.I.; Fantini, F.; Garagnani, S.; Gaiani, M. A Photogrammetry-Based Workflow for the Accurate 3D Construction and Visualization of Museums Assets. Remote Sens. 2021, 13, 486. [Google Scholar] [CrossRef]
- Neoge, S.; Mehendale, N. LiDAR-Based Touchscreen Wall. SSRN J. 2020. [Google Scholar] [CrossRef]
- Campos, P.; Dória, A.; Sousa, M. Interactivity for Museums: Designing and Comparing Sensor-Based Installations. In Human–Computer Interaction—INTERACT 2009, Proceedings of the 12th IFIP TC 13 International Conference, Uppsala, Sweden, 24–28 August 2009; Gross, T., Gulliksen, J., Kotzé, P., Oestreicher, L., Palanque, P., Prates, R.O., Winckler, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5726, pp. 612–615. [Google Scholar]
- Alexander, J.; Barton, J.; Goeser, C. Transforming the Art Museum Experience: Gallery One. In Proceedings of the Annual Cnference of Museums and the Web (MW), Portland, OR, USA, 17–20 April 2013. [Google Scholar]
- Zhang, J.; Shang, J.; Yan, H. The Application of Augmented Reality Technology in Museum Display Design. In Proceedings of the IEEE International Conference Intational Conference on High Performance Computing & Communications, on Data Science & Systems on Smart City on Dependability in Sensor, Cloud & Big Data Systems & Application (HPCC/DSS/SmartCity/DependSys), Haikou, China, 20–22 December 2021; pp. 2344–2348. [Google Scholar]
- Back, M.; Gold, R.; Balsamo, A.; Chow, M.; Gorbet, M.; Harrison, S.; MacDonald, D.; Minnerman, S. Designing innovative reading experiences for a museum exhibition. Computer 2001, 34, 80–87. [Google Scholar] [CrossRef]
- van Eck, W.; Kolstee, Y. The augmented painting: Playful interaction with multi-spectral images. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality—Arts, Media, and Humanities (ISMAR-AMH), Atlanta, GA, USA, 5–8 November 2012; pp. 65–69. [Google Scholar]
- Soga, A.; Shiba, M.; Suzuki, T. Computer-Aided Sugoroku Games in the Edo Period Using Interactive Techniques for Museum Exhibits. In Proceedings of the International Conference on Cyberworlds (CW), Singapore, 3–5 October 2018; pp. 132–137. [Google Scholar]
- Umezu, N.; Iijima, S. Tangible User Interface to Learn about Voronoi Diagrams. In Proceedings of the IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), Virtual, 12–14 December 2022; pp. 221–224. [Google Scholar]
- Google Arts & Culture. Art Selfie. Available online: https://artsandculture.google.com/camera/selfie (accessed on 7 March 2023).
- Takahashi, I.; Oki, M.; Bourreau, B.; Kitahara, I.; Suzuki, K. FUTUREGYM: A gymnasium with interactive floor projection for children with special needs. Int. J. Child Comput. Interact. 2018, 15, 37–47. [Google Scholar] [CrossRef]
- Graf, R.; Benawri, P.; Whitesall, A.E.; Carichner, D.; Li, Z.; Nebeling, M.; Kim, H.S. iGYM: An Interactive Floor Projection System for Inclusive Exergame Environments. In Proceedings of the Annual Symposium on Computer-Human Interaction in Play, Barcelona, Spain, 22–25 October 2019; pp. 31–43. [Google Scholar]
- Barile, F.; Calandra, D.M.; Caso, A.; DAuria, D.; Di Mauro, D.; Cutugno, F.; Rossi, S. ICT Solutions for the Orchestra Project: From Personalized Selection to Enhanced Fruition of Cultural Heritage Data. In Proceedings of the International Conference on Signal-Image Technology and Internet-Based Systems, Marrakech, Morocco, 23–27 November 2014; pp. 501–507. [Google Scholar]
- Umezu, N.; Yuming, B. Floor Projection with QR code-based Interactions and Visitor Drawings. In Proceedings of the IEEE Global Conference on Consumer Electronics (GCCE), Osaka, Japan, 18–21 October 2022; pp. 318–320. [Google Scholar]
- van Delden, R.; Gerritsen, S.; Heylen, D.; Reidsma, D. Co-located augmented play-spaces: Past, present, and perspectives. J. Multimodal User Interfaces 2018, 12, 225–255. [Google Scholar] [CrossRef]
- Sarmiento, J.R.; Capio, A.F.; Sison, J.A.L.; Nabua, C.J.A.; Guadaña, R.R.H. Ask Billy: An Informative Kiosk in a University. In Proceedings of the International Conference in Information and Computing Research (iCORE), Manila, Philippines, 11–12 December 2021; pp. 72–77. [Google Scholar]
- Adhoni, D.Z.A.; Ambreen, S. Developing KIOSKs—Touch Based Interactive Information System. Int. J. Comput. Sci. Inf. Secur. IJCSIS 2017, 15, 166–177. [Google Scholar]
- Rehg, J.M.; Loughlin, M.; Waters, K. Vision for a smart kiosk. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), San Juan, Puerto Rico, 17–19 June 1997; pp. 690–696. [Google Scholar]
- Edwards, A.; Elmer, B.; Kim, B.S.; Smith, K. AR-enabled wayfinding kiosk. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality—Arts, Media, and Humanities, Seoul, Republic of Korea, 13–16 October 2010; pp. 65–66. [Google Scholar]
- Yassin, A.; Nasser, Y.; Awad, M.; Al-Dubai, A.; Liu, R.; Yuen, C.; Raulefs, R.; Aboutanios, E. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications. IEEE Commun. Surv. Tutor. 2017, 19, 1327–1346. [Google Scholar] [CrossRef]
- Guo, D.; Zhu, Y.; Xu, W.; Ge, Y.; Shang, S.; Ding, Z. How to Find Appropriate Automobile Exhibition Halls: Towards a Personalized Recommendation Service for Auto Show. In Proceedings of the IEEE International Conference on Data Mining Workshop (ICDMW), Atlantic City, NJ, USA, 14–17 November 2015; pp. 1025–1030. [Google Scholar]
- Giuliano, R.; Mazzenga, F.; Petracca, M.; Vatalaro, F. Application of Radio Frequency Identification for Museum Environment. In Proceedings of the Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises, Hammamet, Tunisia, 17–20 June 2013; pp. 190–195. [Google Scholar]
- Huang, Y.P.; Wang, S.S.; Sandnes, F.E. RFID-Based Guide Gives Museum Visitors More Freedom. IT Prof. 2011, 13, 25–29. [Google Scholar] [CrossRef]
- D’Amico, G.; Del Bimbo, A.; Ferracani, A.; Landucci, L.; Pezzatini, D.; Santi, L. RFID-based Solutions for User Profiling in Interactive Exhibits. In Proceedings of the IEEE International Symposium on Multimedia, Dana Point, CA, USA, 5–7 December 2011; pp. 216–221. [Google Scholar]
- Fevgas, A.; Tsompanopoulou, P.; Tsiovoulos, A.; Drasidis, G.; Bozanis, P. Utilizing UHF RFIDs to Enhance Museum Visiting Experience. In Proceedings of the Panhellenic Conference on Informatics, Tripoli, Greece, 10–12 September 2010; p. 5600283. [Google Scholar]
- Guerrero-Higueras, Á.M.; Álvarez-Aparicio, C.; Calvo Olivera, M.C.; Rodríguez-Lera, F.J.; Fernández-Llamas, C.; Rico, F.M.; Matellán, V. Tracking People in a Mobile Robot From 2D LIDAR Scans Using Full Convolutional Neural Networks for Security in Cluttered Environments. Front. Neurorobotics 2018, 12, 85. [Google Scholar] [CrossRef]
- Hasan, M.; Hanawa, J.; Goto, R.; Fukuda, H.; Kuno, Y.; Kobayashi, Y. Tracking People Using Ankle-Level 2D LiDAR for Gait Analysis. In Advances in Artificial Intelligence, Software and Systems Engineering, Proceedings of the AHFE 2020 Virtual Conferences on Software and Systems Engineering, and Artificial Intelligence and Social Computing, Virtual, 16–20 July 2020; Ahram, T., Ed.; Springer International Publishing: Cham, Switzerland, 2021; Volume 1213, pp. 40–46. [Google Scholar]
- Jia, D.; Hermans, A.; Leibe, B. 2D vs. 3D LiDAR-based Person Detection on Mobile Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 3604–3611. [Google Scholar]
- Hitachi Civic Science Museum, Ibaraki, Japan. Available online: http://www.civic.jp/science/ (accessed on 20 January 2023).
- Shanghai Slamtec Co., Ltd. A1M8 Data Sheet. Available online: https://download-en.slamtec.com/api/download/rplidar-a1m8-datasheet/3.2?lang=en (accessed on 11 February 2023).
- Shanghai Slamtec Co., Ltd. Slamtec RPLIDAR Public SDK for C++. Available online: https://github.com/Slamtec/rplidar_sdk (accessed on 20 January 2023).
- openFrameworks. Available online: https://openframeworks.cc (accessed on 20 January 2023).
- NASA’s Scientific Visualization Studio. CGI Moon Kit. Available online: https://svs.gsfc.nasa.gov/4720 (accessed on 23 December 2022).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2D LiDAR | Camera (RGB) | RGBD Camera (Depth Sensor) | Button, Touch Sensor | IR Sensor | Microphone | |
|---|---|---|---|---|---|---|
| Privacy-preserving | ✓ | ✓ | ✓ | |||
| Touchless operation | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Sensing speed | ✓ | ✓ | ✓ | ✓ | ✓ | |
| Rich information | ✓ | ✓ | ✓ | |||
| Illumination robustness | ✓(IR) | ✓(IR) | ✓ | ✓ | ||
| Wide measurement angle | ✓ | ✓ | ✓ | |||
| Multiple-user distinctive | ✓ | ✓ | ||||
| Typical cost (USD) |
| Item | Specification |
|---|---|
| Size | 97 × 70 × 60 (mm) |
| Weight | 170 (g) |
| Distance range (radius) | 0.15–6 (m) |
| Distance resolution | 0.5 (mm) or 1% of the distance |
| Angular range | 0–360 (degree) |
| Sample frequency | 2000 (Hz) |
| Scan rate | 5.5 (1–10) (Hz) |
| Scan rotation | clockwise (seen from the top) |
| IR Laser wavelength | 785 (nm) |
| IR Laser power | 3 (mW) |
| Interface | USB-C (USB 1.0) |
| Mode | (%) | (%) | ||
|---|---|---|---|---|
| With kiosk Interactions (2:03:50) | 32.6 | 65.9 | 6.62 | 1.49 |
| Without kiosk interactions (3:07:57) | 48.7 | 93.9 | 4.78 | 0.51 |
| Whole experimental period (5:11:47) | 41.8 | 83.1 | 6.63 | 0.87 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umezu, N.; Koizumi, S.; Nakagawa, K.; Nishida, S. Potential of Low-Cost Light Detection and Ranging (LiDAR) Sensors: Case Studies for Enhancing Visitor Experience at a Science Museum. Electronics 2023, 12, 3351. https://doi.org/10.3390/electronics12153351
Umezu N, Koizumi S, Nakagawa K, Nishida S. Potential of Low-Cost Light Detection and Ranging (LiDAR) Sensors: Case Studies for Enhancing Visitor Experience at a Science Museum. Electronics. 2023; 12(15):3351. https://doi.org/10.3390/electronics12153351
Chicago/Turabian StyleUmezu, Nobuyuki, Shohei Koizumi, Kohki Nakagawa, and Saku Nishida. 2023. "Potential of Low-Cost Light Detection and Ranging (LiDAR) Sensors: Case Studies for Enhancing Visitor Experience at a Science Museum" Electronics 12, no. 15: 3351. https://doi.org/10.3390/electronics12153351
APA StyleUmezu, N., Koizumi, S., Nakagawa, K., & Nishida, S. (2023). Potential of Low-Cost Light Detection and Ranging (LiDAR) Sensors: Case Studies for Enhancing Visitor Experience at a Science Museum. Electronics, 12(15), 3351. https://doi.org/10.3390/electronics12153351