Circular scanning has been widely used for surveillance radars. The radar antenna scans a range of 360° in the azimuth at a constant rate, while the elevation angle is kept fixed. This work considers that antennas of both the radar and the EW system scan circularly.
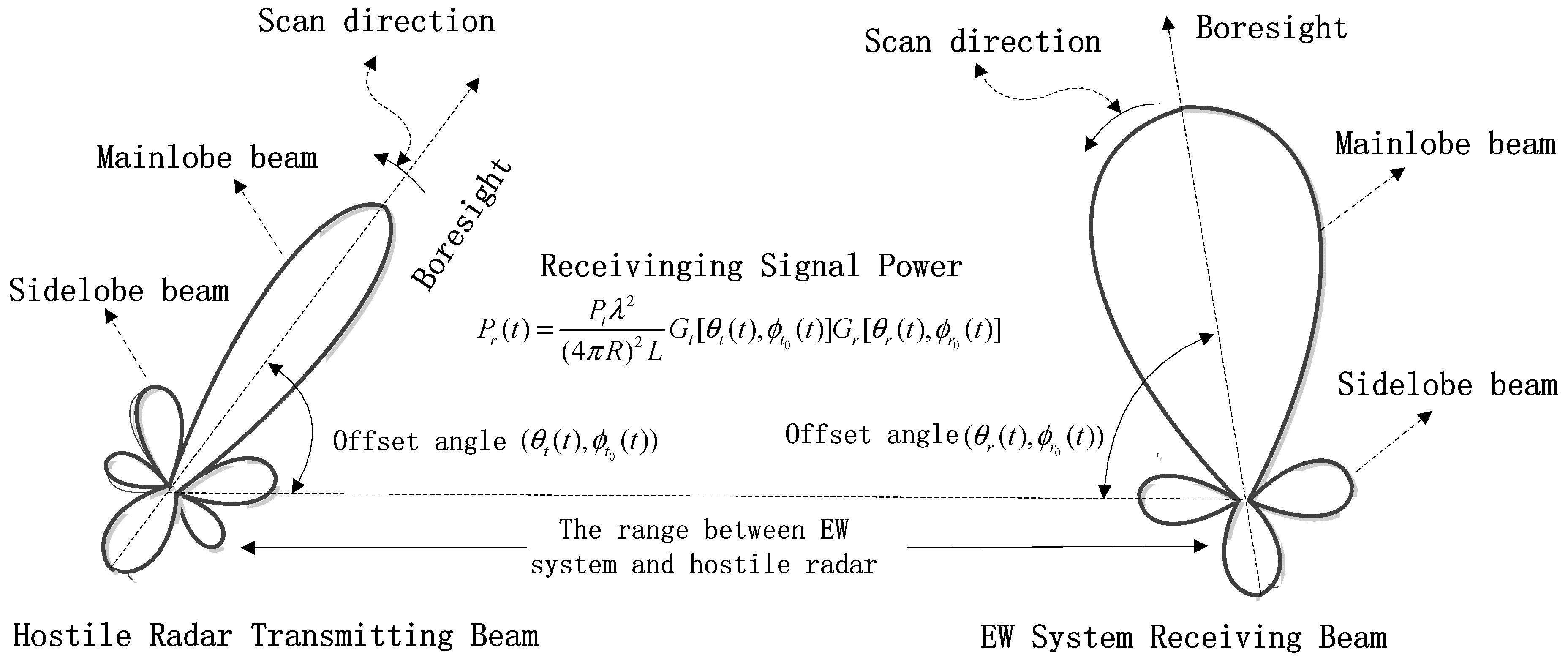
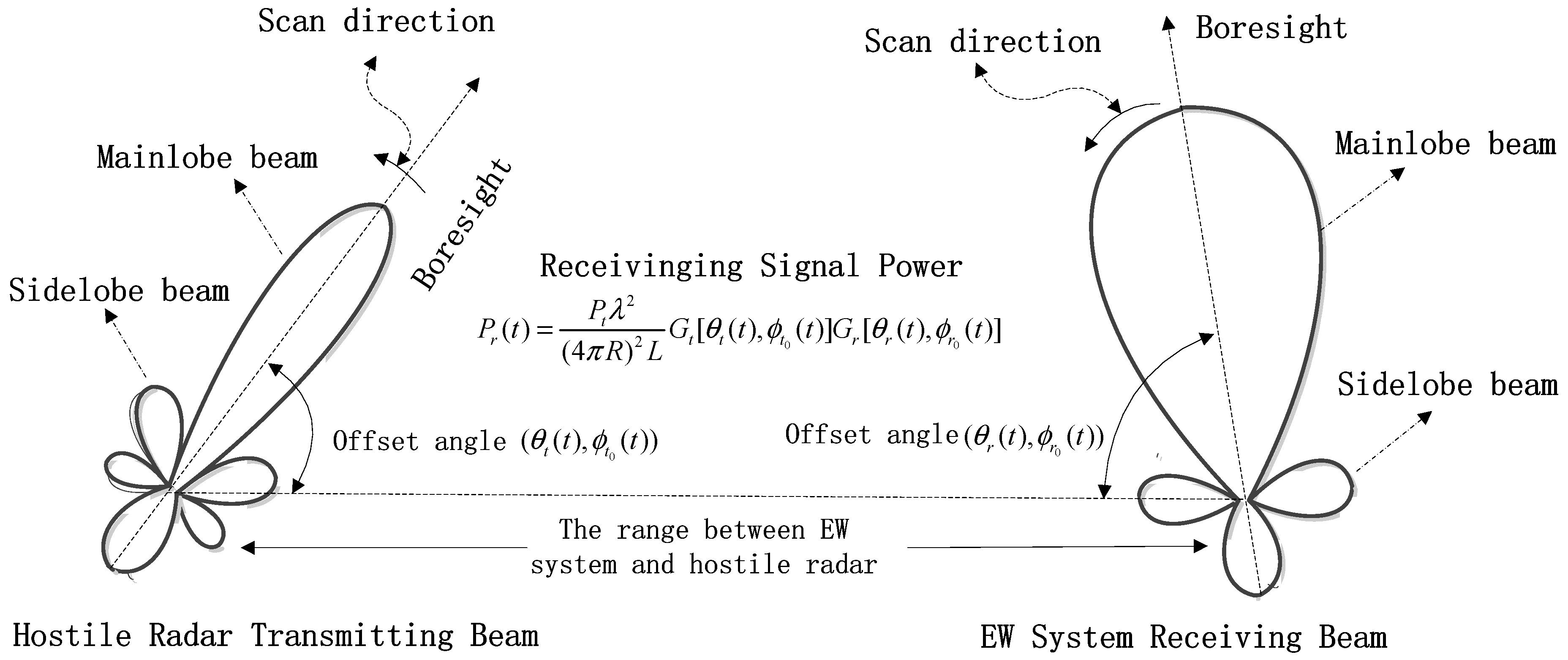
First, the model of the received signal power in an EW system is constructed under the assumption that antennas of the radar and EW system mounted on a stationary platform scan circularly. Generally, the radar transmitting antenna has a narrow beam used to increase the spatial resolution and to extend the detection range, so most of the transmitting power is concentrated in the boresight direction, i.e., in the main lobe beam direction. Since the boresight direction of an antenna is a direction in which the antenna gain is maximum, the received signal of the EW system has the maximum power when the boresight of a radar antenna passes through the boresight of the EW system antenna. When the distance between an EW system and a radar is
R, the received signal power
is calculated as
where
and
denote the radar transmitting power and signal wavelength, respectively;
denotes the system loss factor, including atmospheric propagation loss and polarization mismatch loss between radar antenna and EW system antenna;
and
denote the azimuth angles of the transmitting antenna and receiving antenna, respectively;
and
denote the elevation angles of the transmitting antenna and receiving antenna, respectively;
is the radar antenna boresight offset angle in the EW system direction at time
; (
) is the EW system boresight offset angle in the radar direction at time
;
is the radar transmitting antenna gain in the EW system direction at time
;
is the EW system antenna gain in the radar direction at time
. Commonly, the radar transmitting power
is constant, so term
in Equation (1) is assumed to be constant because the range between radar and EW system is considered changing negligibly. The loss factor
is estimated as a constant. Therefore, there are two dominant factors determining the received signal power under the condition that radar and EW system’ antennas scan circularly, namely,
and
. As the radar and EW system antennas rotate,
and
vary with time
, and are respectively calculated as
where
and
denote the maximum gain and normalized beam pattern of an antenna, respectively;
and
denote the maximum gain and normalized beam pattern of an EW system antenna.
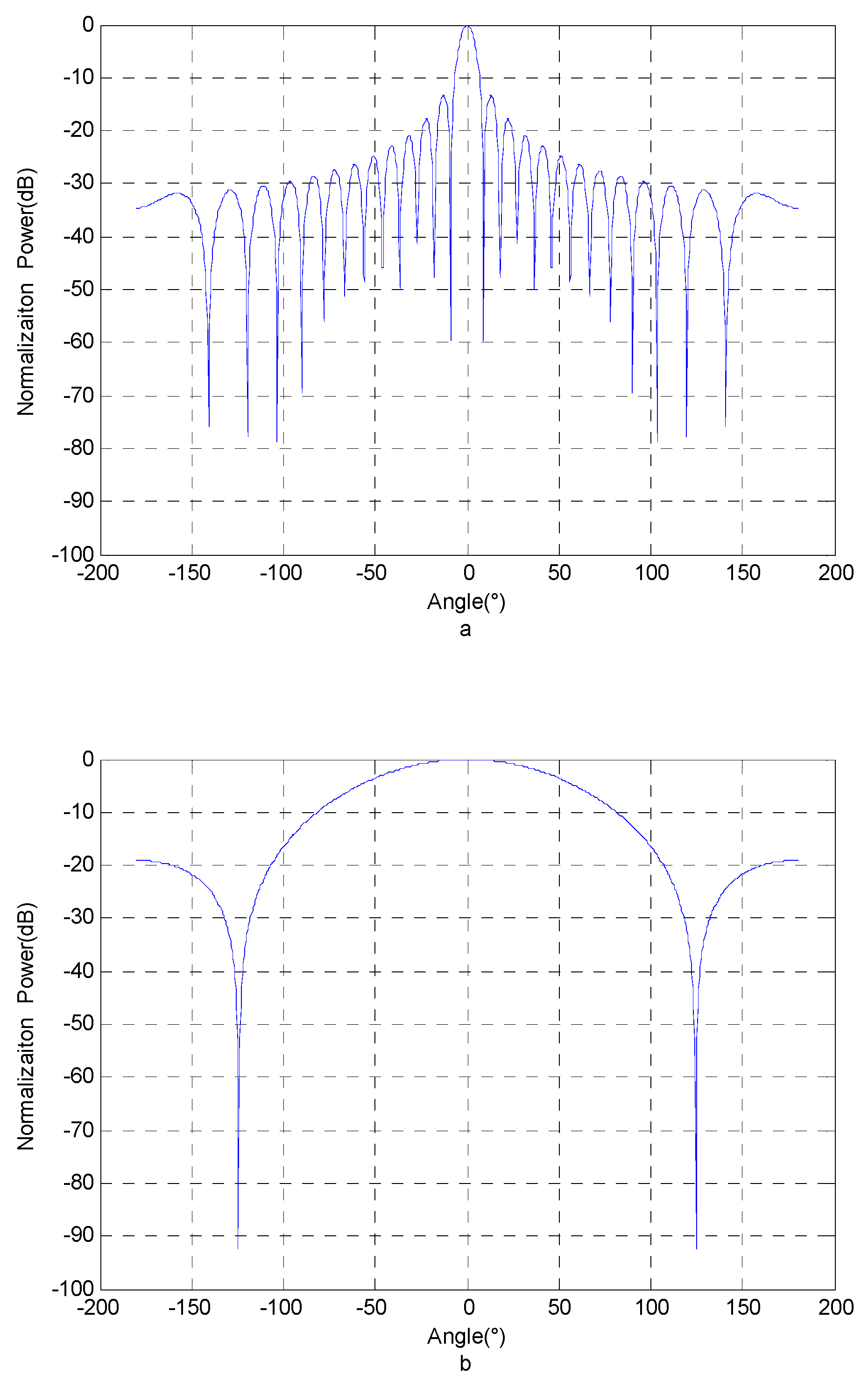
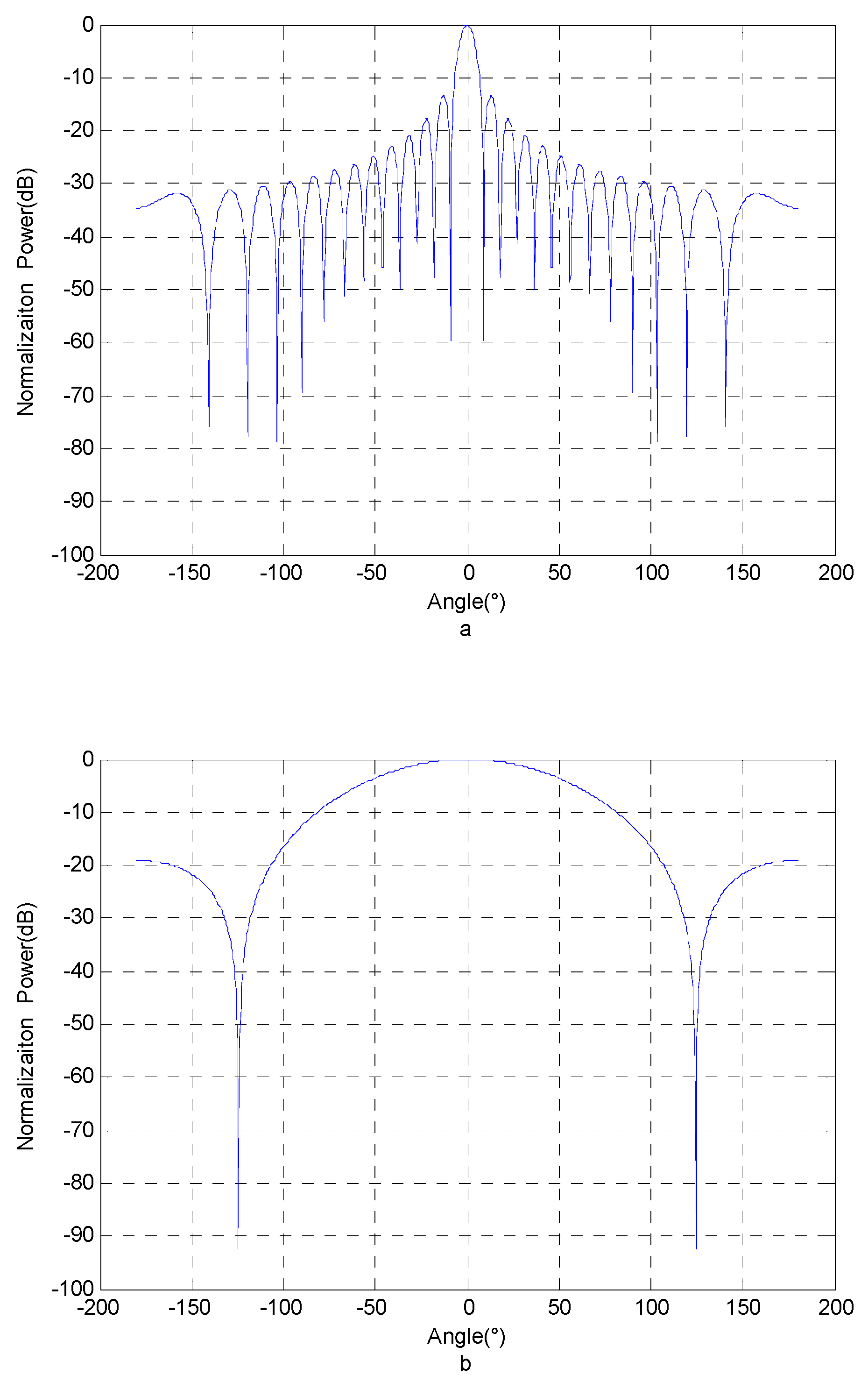
The antenna beam pattern
is defined by the antenna aperture shape and illumination function. However, since beam patterns do not have closed-form expressions, this paper considers only the beam pattern of a uniformly illuminated rectangular aperture radar, and its closed-form expression is given by [
22]:
where the shape and beamwidth of the main lobe can be modified by adjusting coefficients
and
. The sidelobe number and antenna beam directivity can be changed by tuning
. The antenna gain is calculated by [
15]:
where
and
are the 3-dB azimuth beamwidth and 3-dB elevation beamwidth of an antenna, and they are defined by
. Therefore, once the beam patterns of the radar and EW system’s antennas are designed, the gains of the radar and EW system are fixed, and
value is defined by the antenna boresight offset angle. If the EW system antenna is stationary without rotating, the azimuth and elevation angles are unchanging; hence, (
) is constant over time, and the received signal power of the EW system varies only with
. However, when the radar and EW system’s antennas rotate, the received signal power of the EW system varies with both
and
. When antennas of the radar and EW system scan circularly, as depicted in
Figure 1, the azimuth angles
and
vary with antenna rotation, but the elevation angles
and
are constant; thus,
and
vary only with azimuth angles at time
t. Accordingly, the radar’s transmitting antenna gain in the EW system direction and the EW system’s receiving antenna gain in the radar direction are denoted by
and
, respectively, and
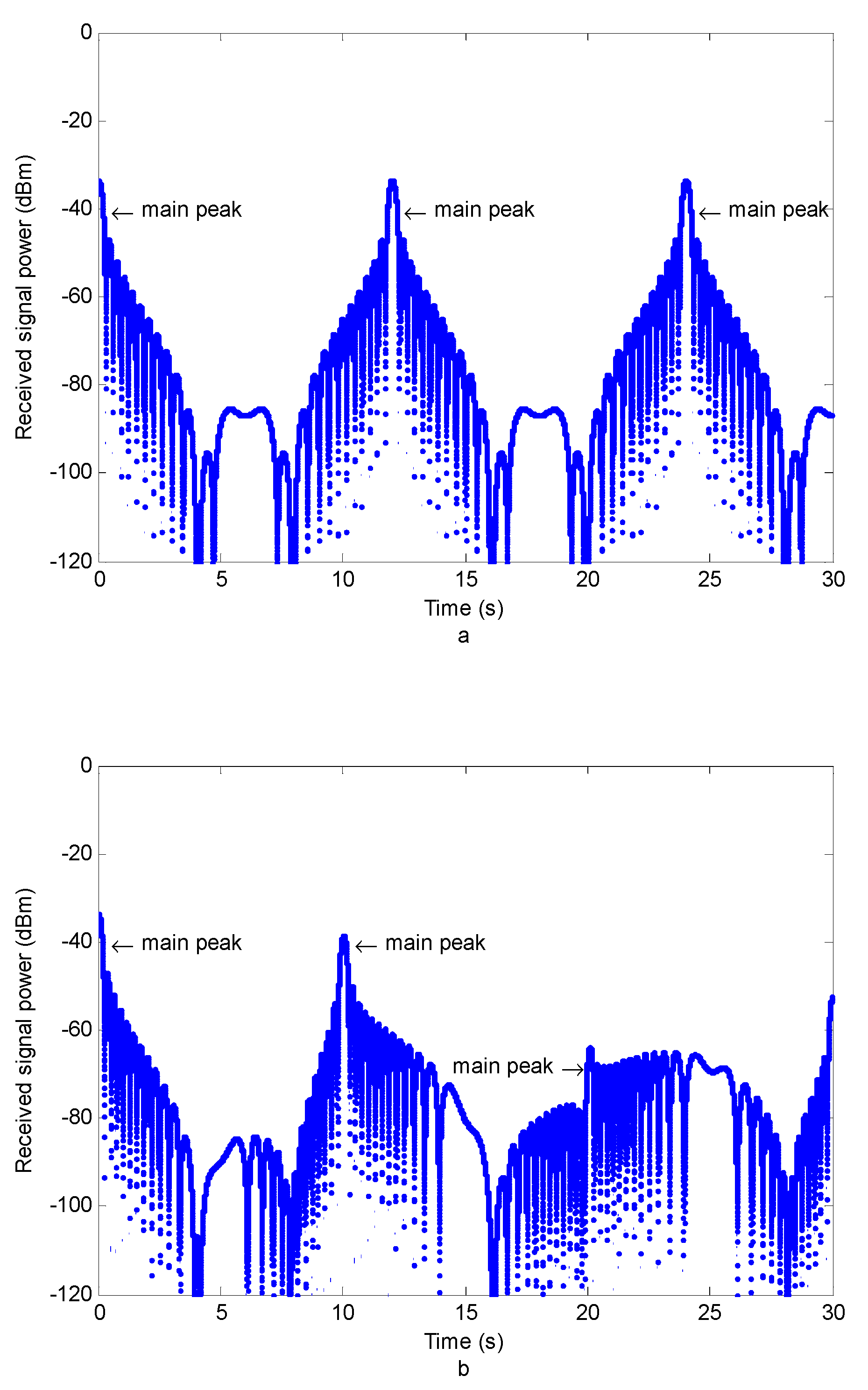
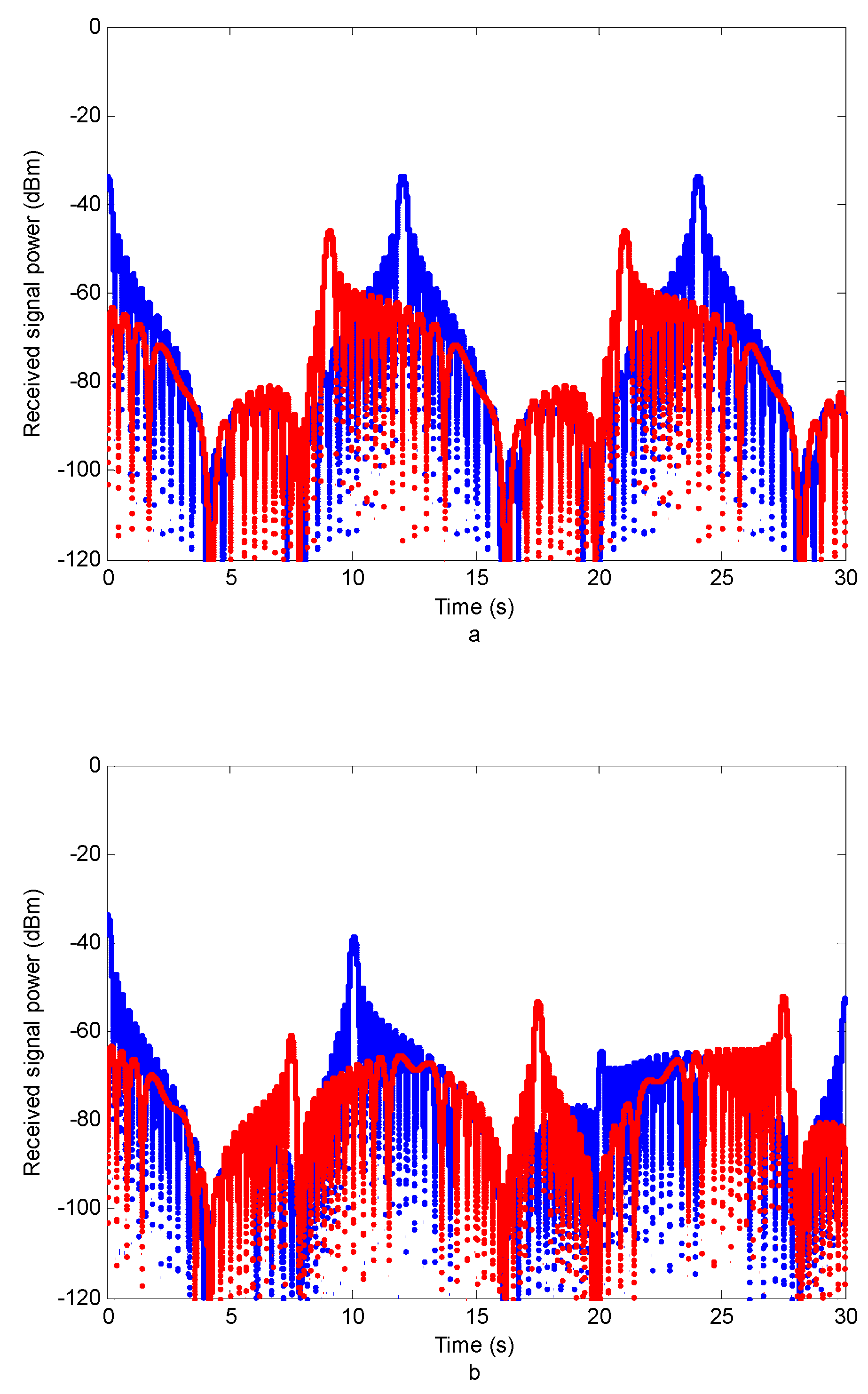
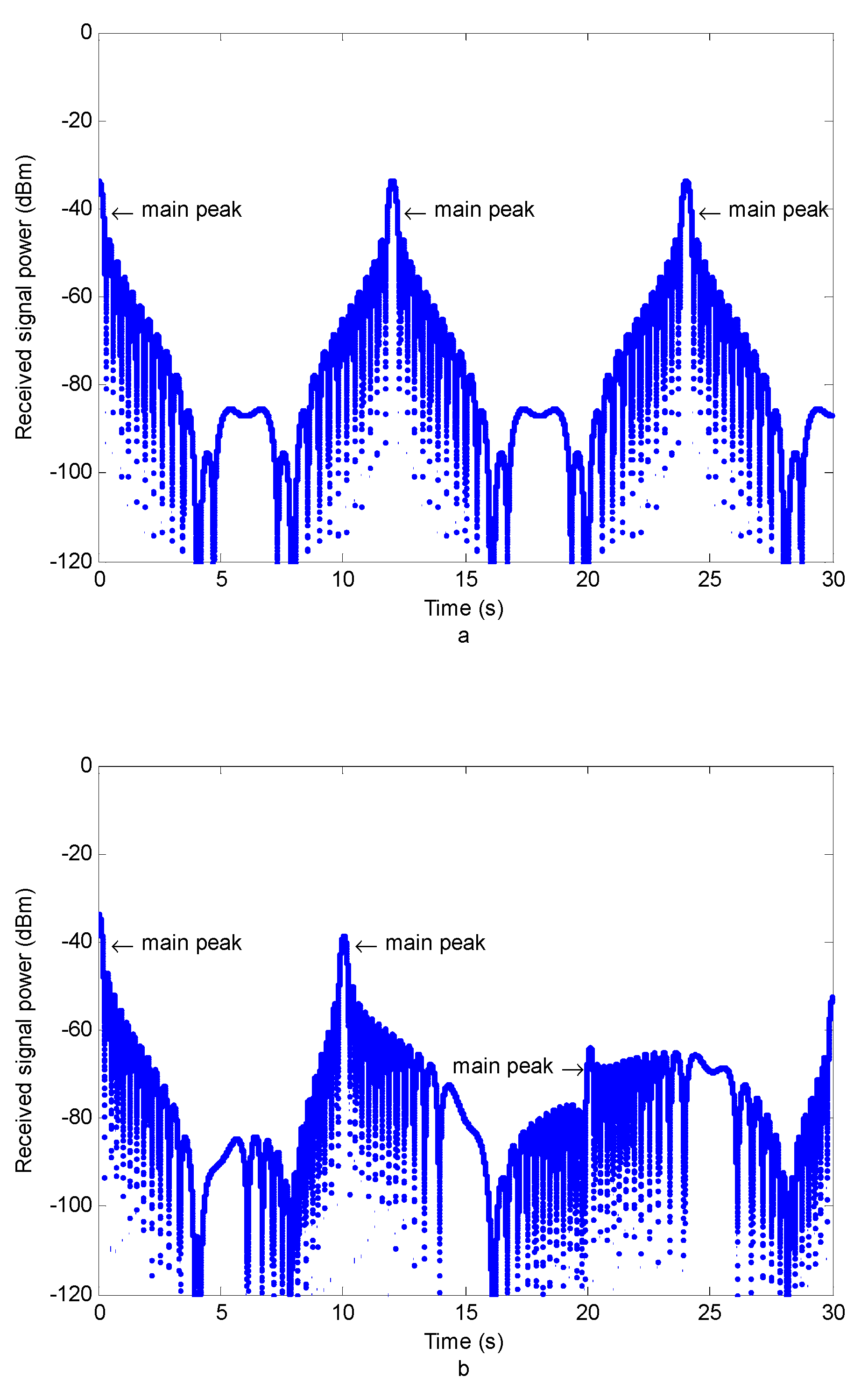
and
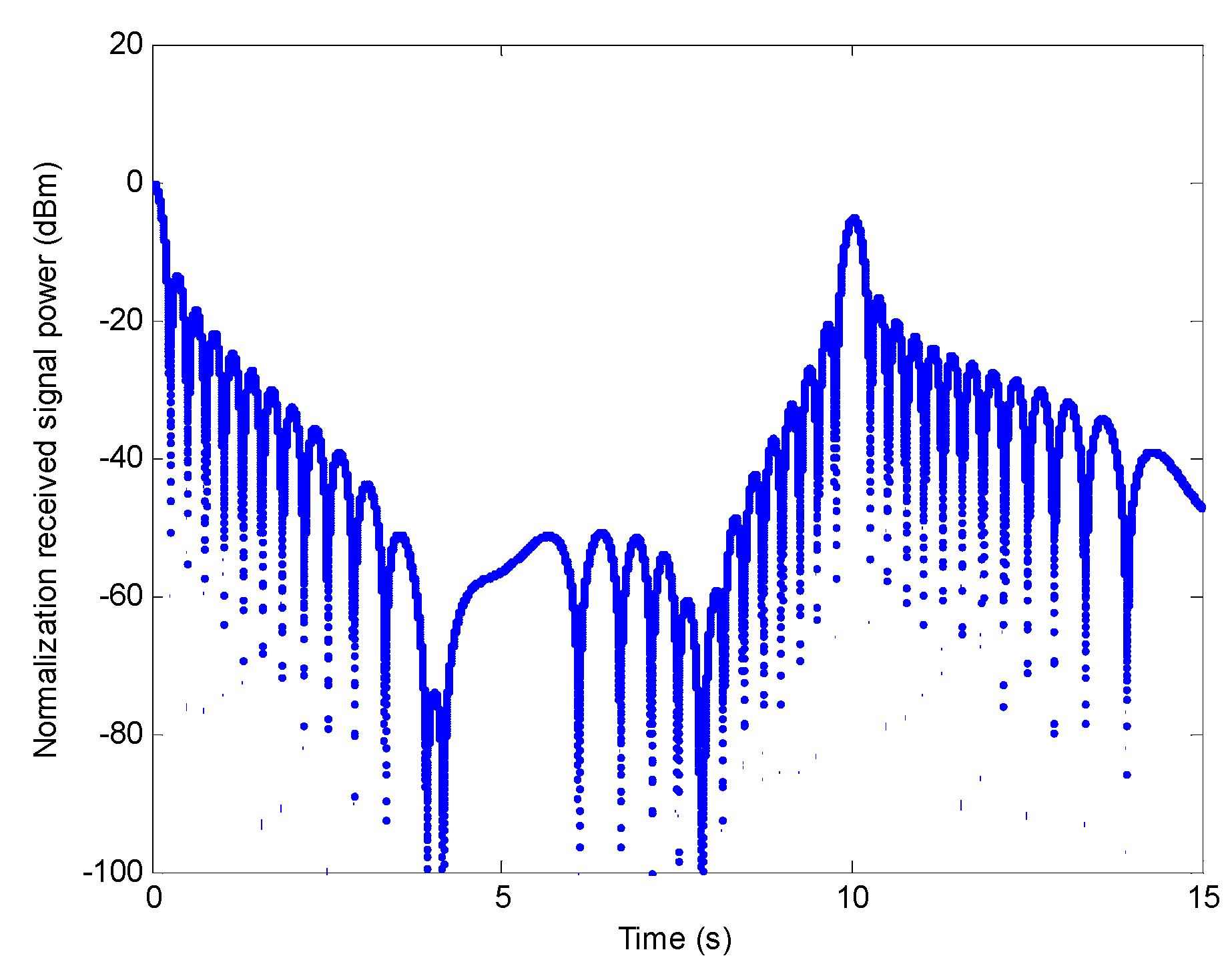
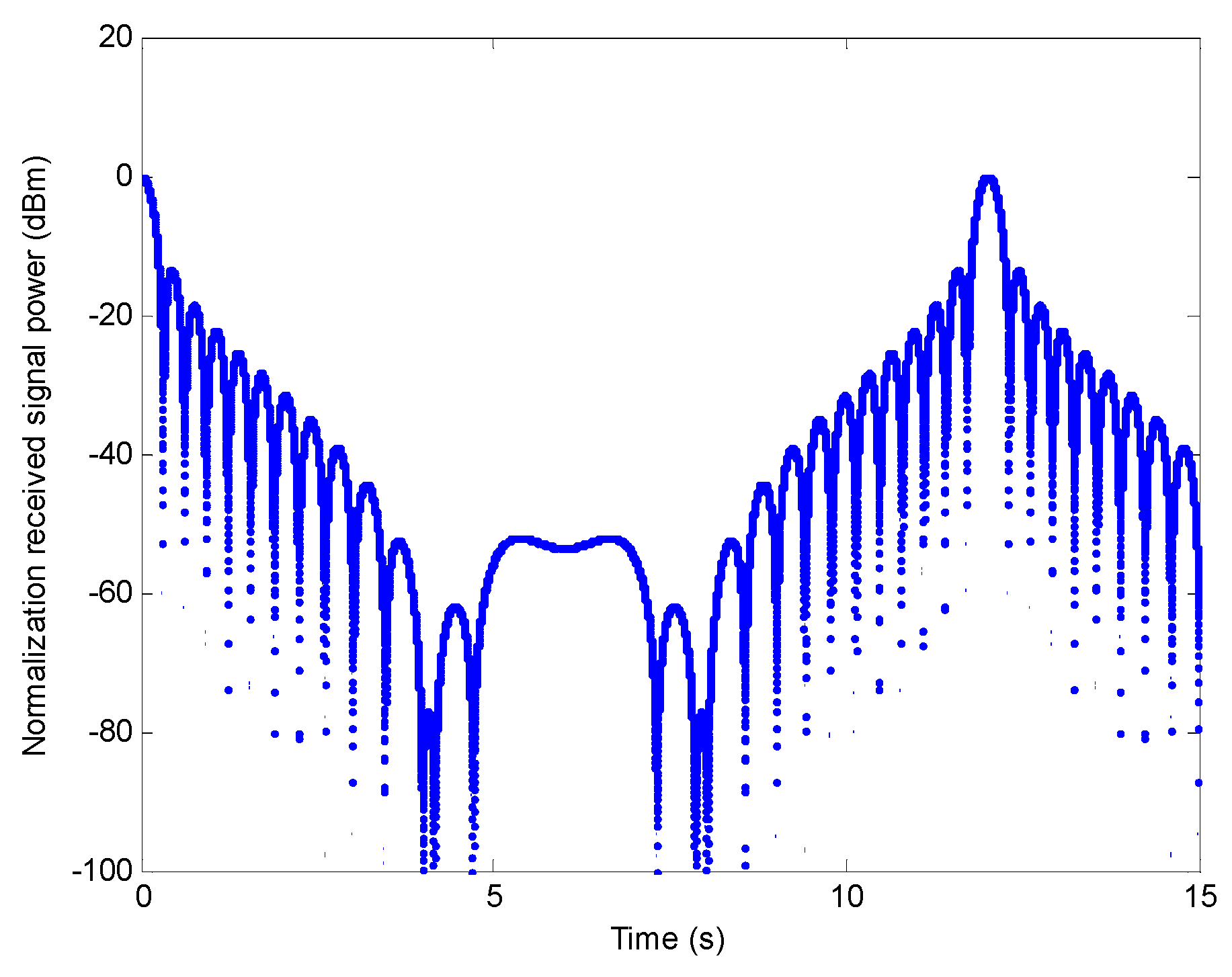
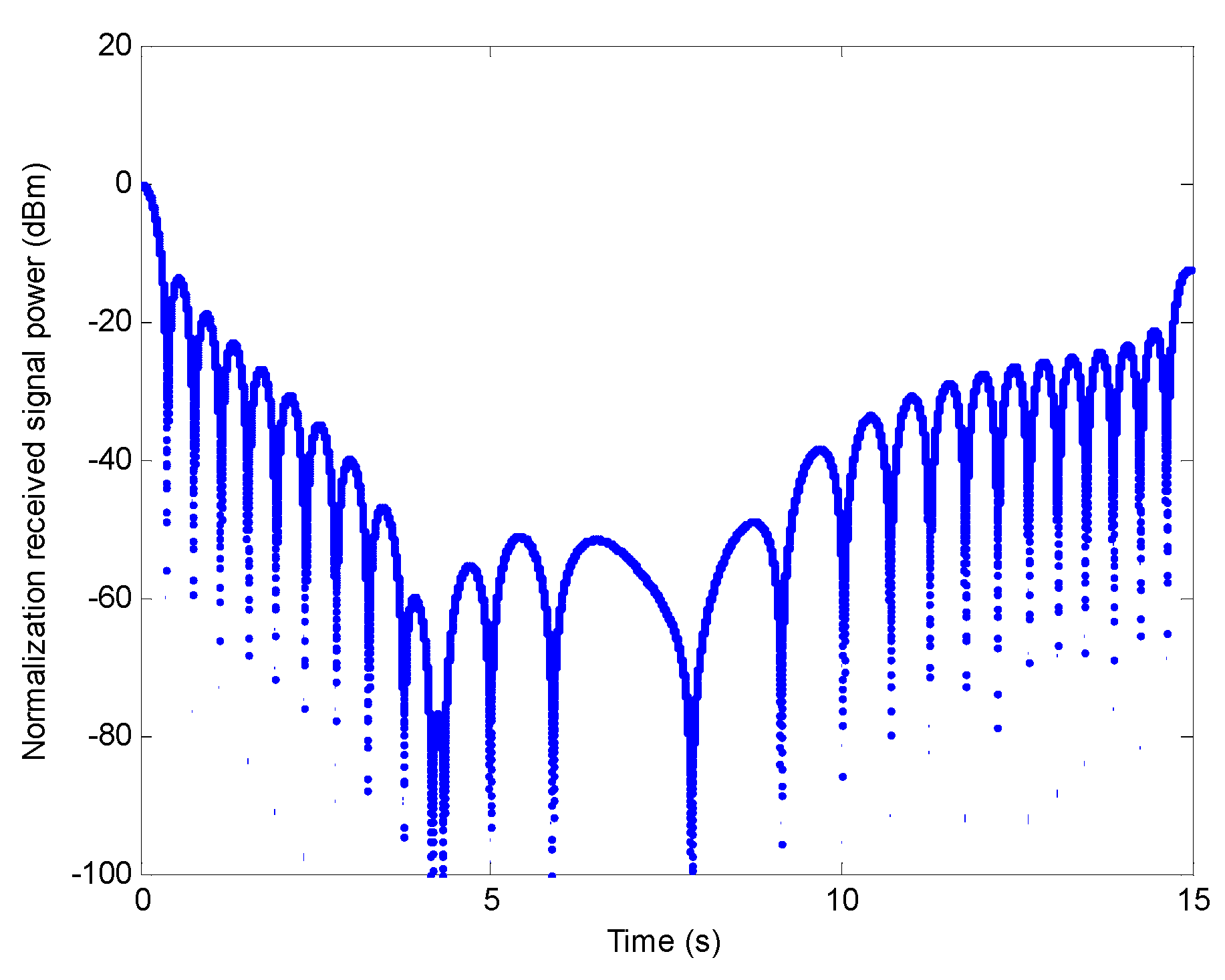
are constant. Circular scanning defines the transmitting and receiving beam boresight offset angles. When the radar’s transmitting beam boresight faces directly to the EW system, and EW system’s receiving beam boresight faces directly to the radar, the radar antenna’s main lobe beam covers the EW system, and the EW system antenna’s main lobe beam covers the radar at the same time. Hence, the product of
and
is maximum, which causes a main peak in the received signal time–power images. When the product of
and
is minimum at time
, the received signal of the EW system has the minimum power, which causes a valley value.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}