
Prompt Frequency Stabilization of Ultra-Stable Laser via Improved Mean Shift Algorithm

 , ,
, ,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Experimental Model
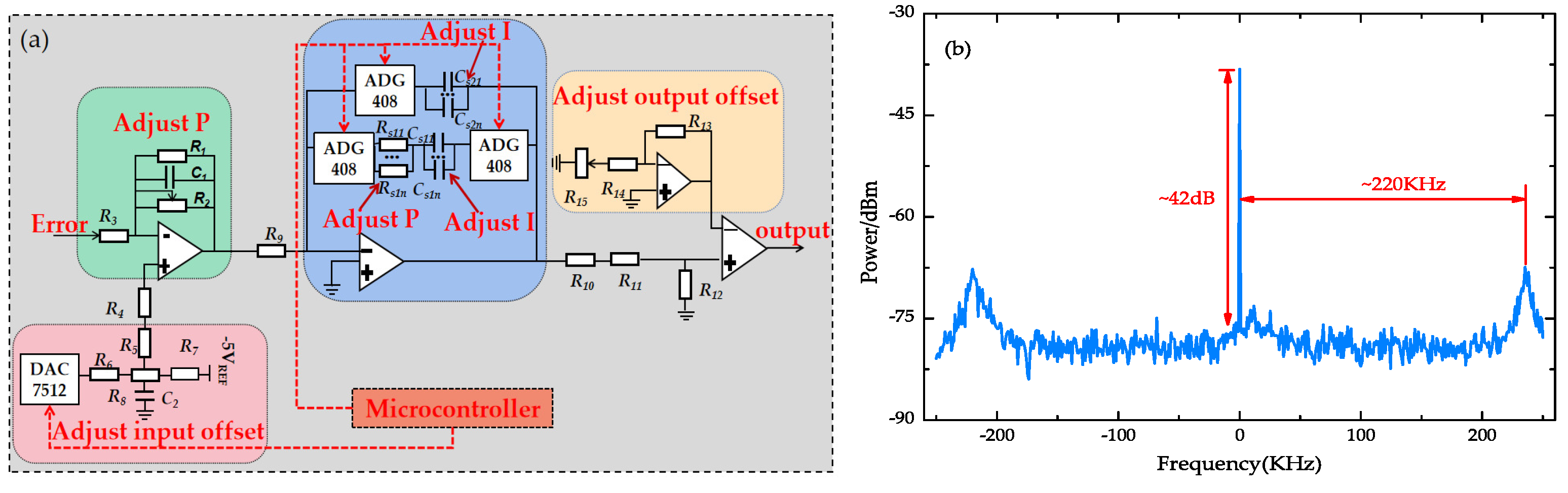
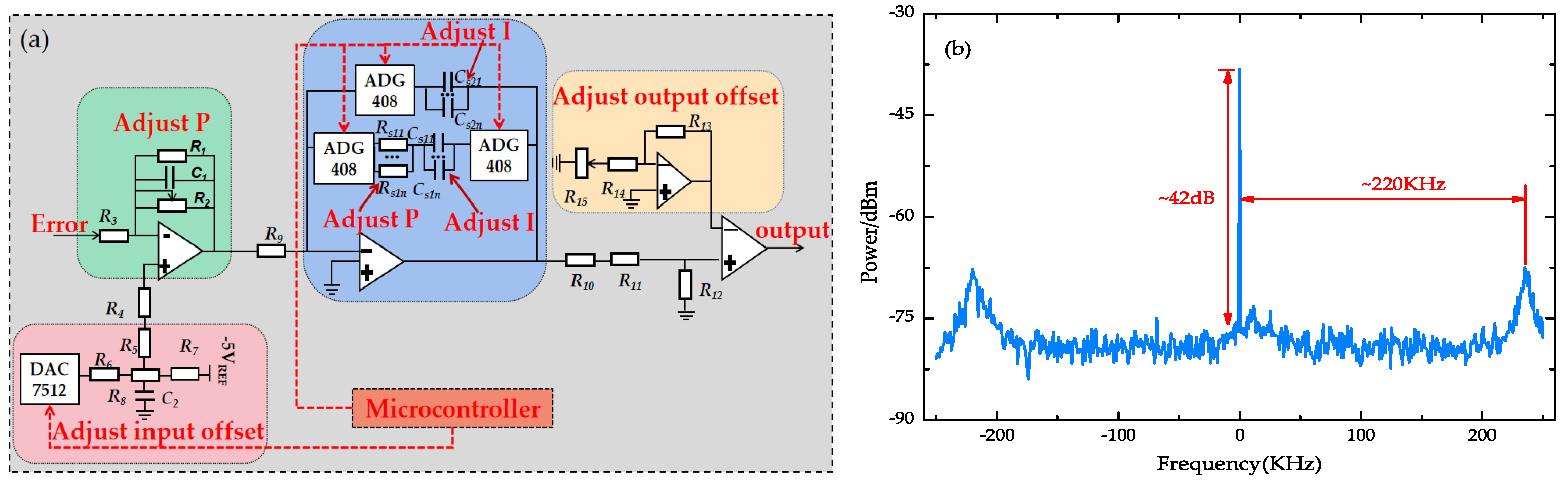
2.1. Hardware Design
2.2. Software Design
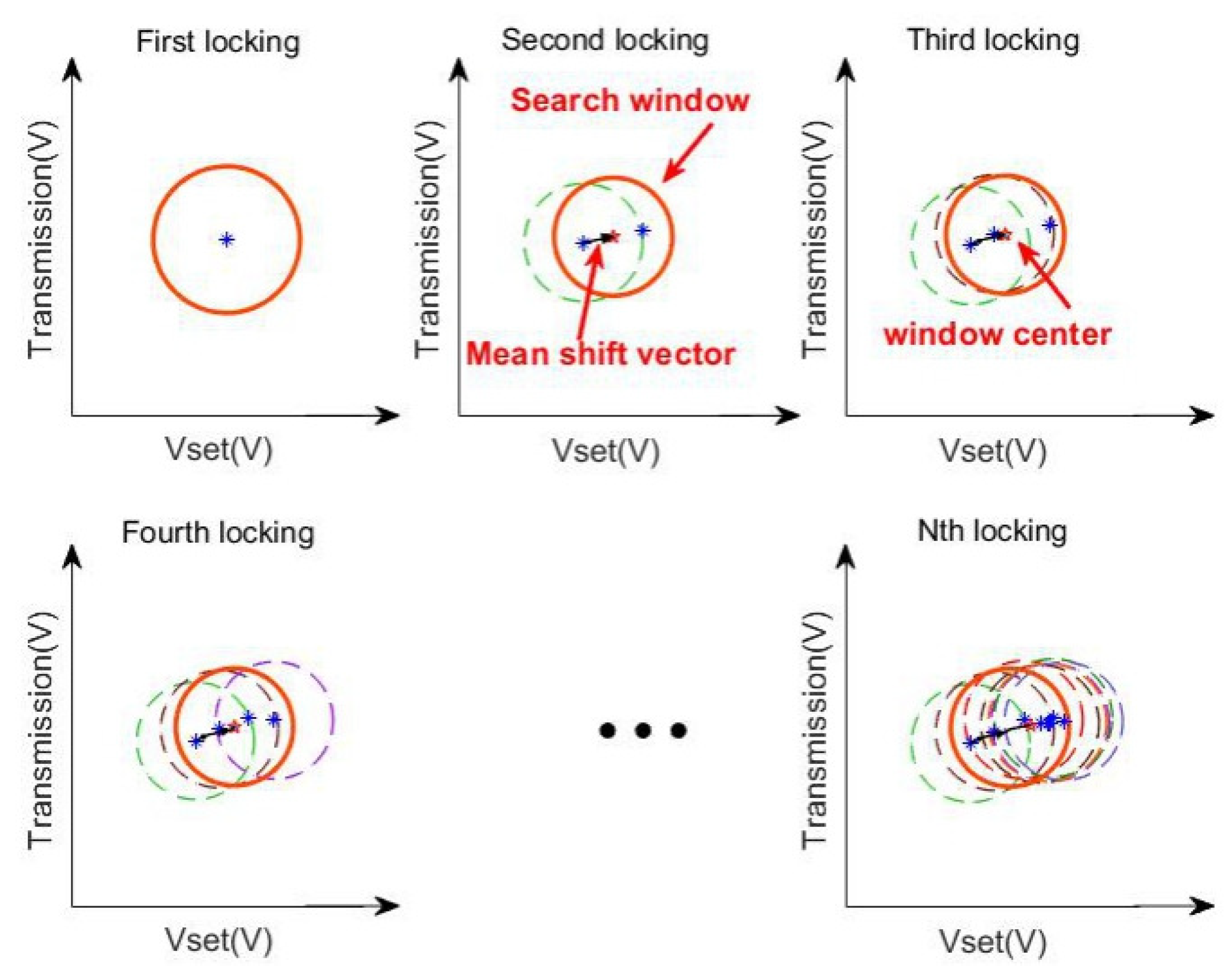
2.2.1. Intelligent Search for the Locking Point
2.2.2. Optimizing of the Resonance Peak
3. Experimental Results and Discussion
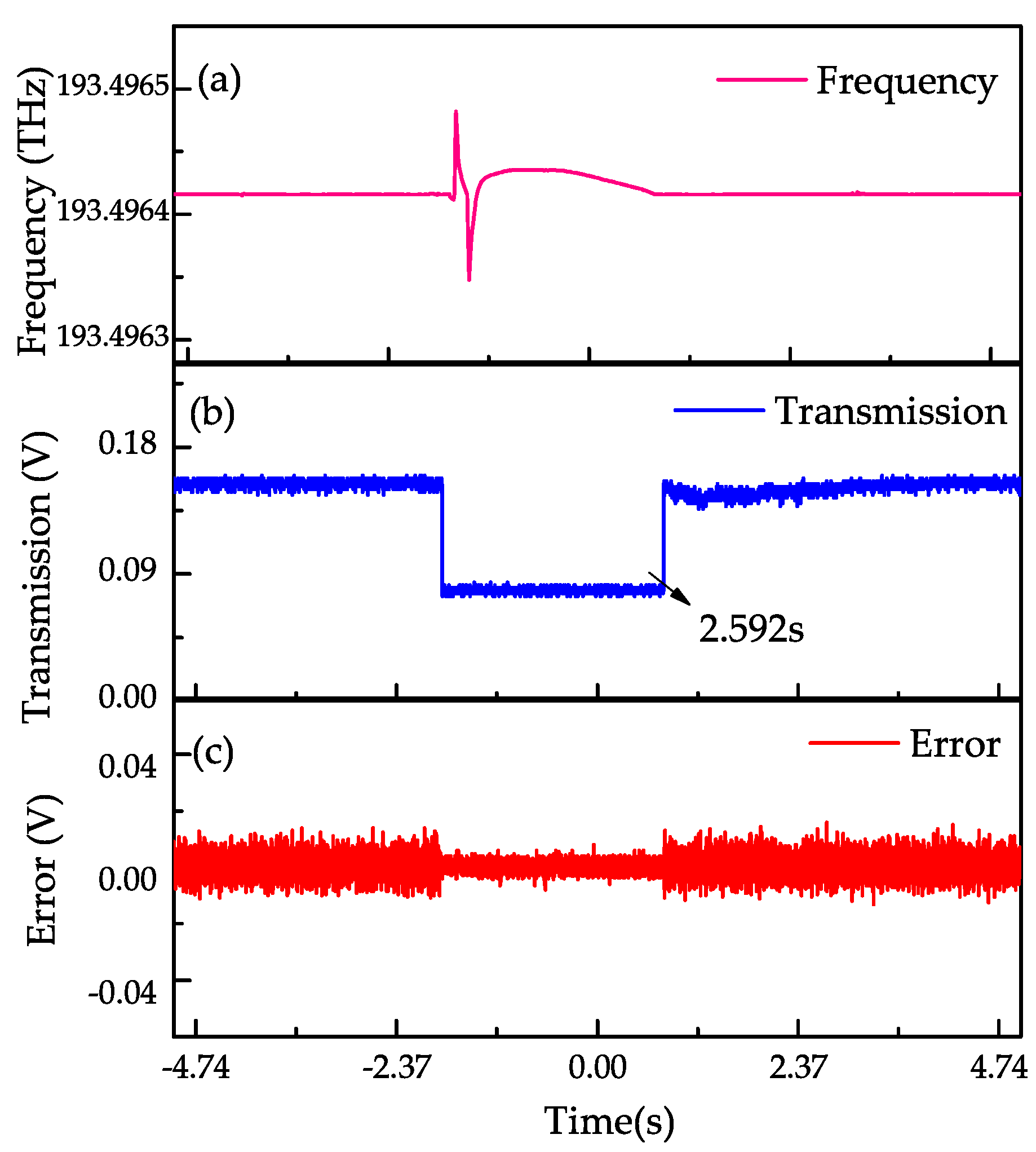
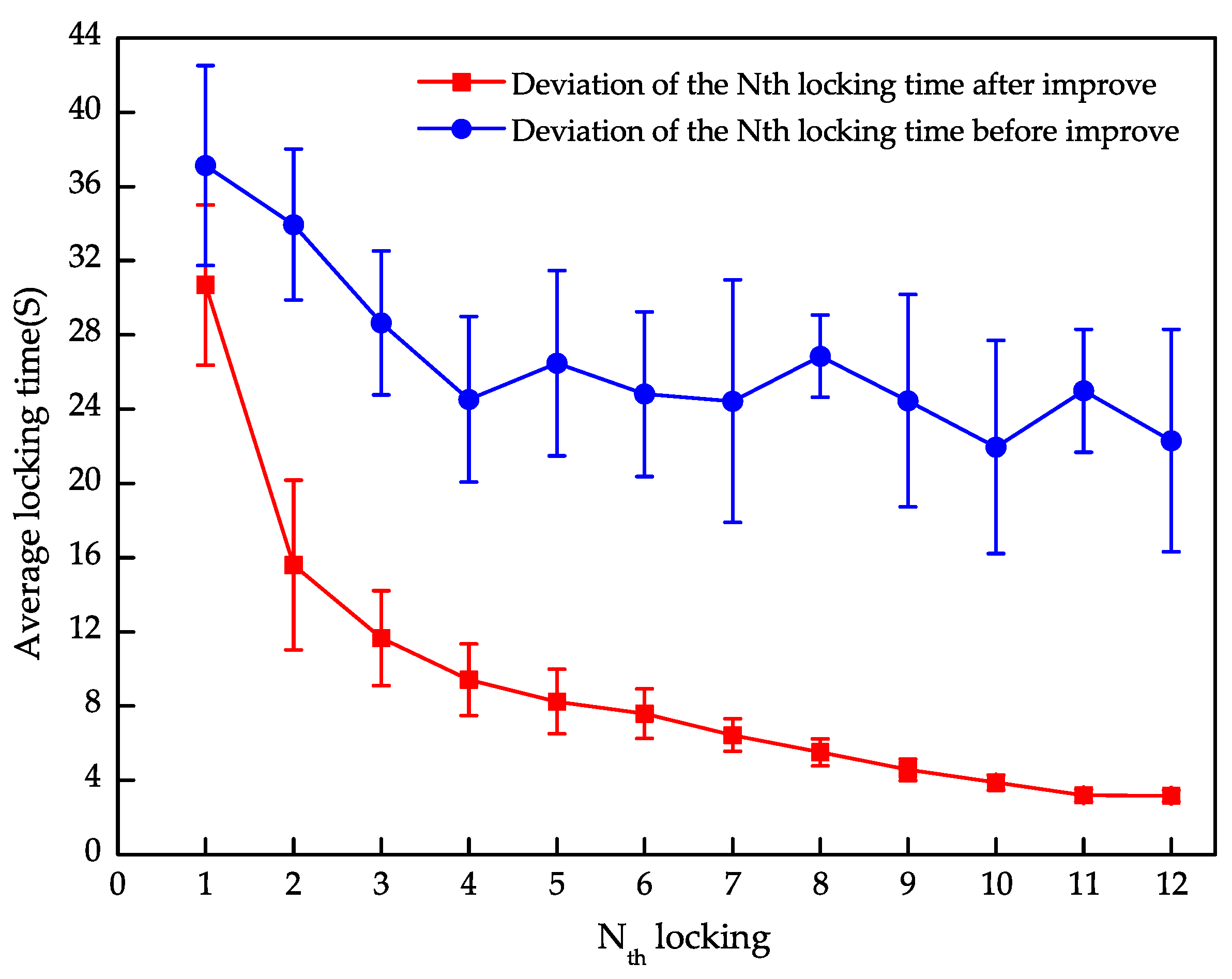
3.1. Test of Relocking Algorithm
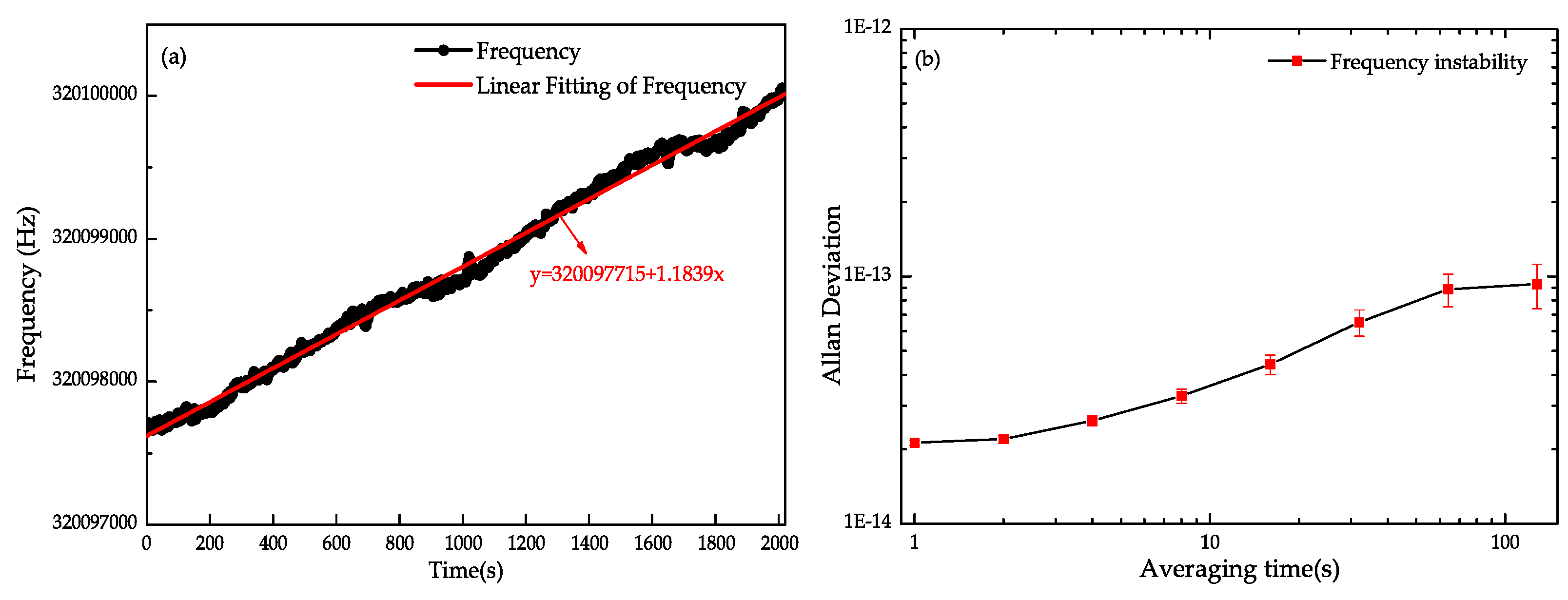
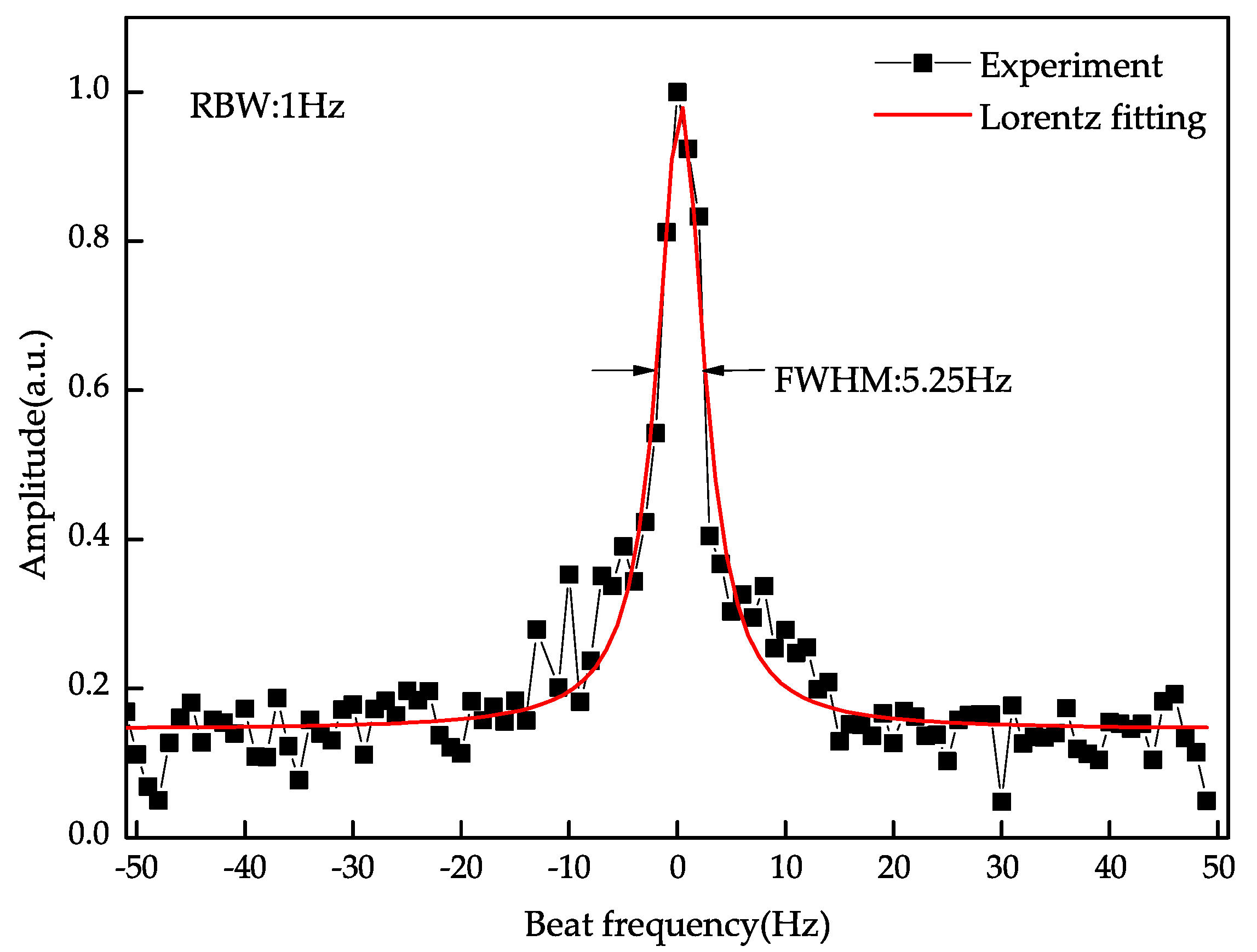
3.2. Frequency Stability of the Ultra-Stable Laser
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Cao, J.; Zhang, P.; Shang, J.; Cui, K.; Huang, X. A compact, transportable single-ion optical clock with 7.8 × 10−17 systematic uncertainty. Appl. Phys. B 2017, 123, 112. [Google Scholar] [CrossRef]
- Schiller, S.; Görlitz, A.; Nevsky, A.; Alighanbari, S.; Vasilyev, S.; Abou-Jaoudeh, C.; Mura, G.; Franzen, T.; Sterr, U.; Falke, S. The Space Optical Clocks Project: Development of high-performance transportable and breadboard optical clocks and advanced subsystems. In Proceedings of the 2012 European Frequency and Time Forum, Gothenburg, Sweden, 23–27 April 2012; pp. 412–418. [Google Scholar]
- Swierad, D.; Hfner, S.; Vogt, S.; Venon, B.; Sterr, U. Ultra-stable clock laser system development towards space applications. Sci. Rep. 2016, 6, 33973. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patrick, K.; Bogan, C.; Danzmann, K.; Frede, M.; Kim, H.; King, P. Stabilized high-power laser system for the gravitational wave detector advanced LIGO. Opt. Express 2012, 20, 10617–10634. [Google Scholar]
- Nina, B.; Fabian, M.; Benno, W. Sequential high power laser amplifiers for gravitational wave detection. Opt. Express 2020, 28, 29469–29478. [Google Scholar]
- Li, Y.; Wang, C.; Wang, L.; Liu, H.; Jin, G. A laser interferometer prototype with pico-meter measurement precision for Taiji space gravitational wave detection missionin China. Microgravity Sci. Technol. 2020, 32, 331–338. [Google Scholar] [CrossRef]
- Dickmann, J.; Kroker, S.; Levin, Y.; Nawrodt, R.; Vyatchanin, S. Thermal noise of beam splitters in laser gravitational wave detectors. Phys. Rev. D 2018, 98, 082002. [Google Scholar]
- Peik, E.; Schumm, T.; Safronova, M.S.; Palffy, A.; Weitenberg, J.; Thirolf, P.G. Nuclear clocks for testing fundamental physics. Quantum Sci. Technol. 2021, 6, 034002. [Google Scholar] [CrossRef]
- Alauze, X.; Lim, J.; Trigatzis, M.A.; Swarbrick, S.; Collings, F.J.; Fitch, N.J.; Sauer, B.E.; Tarbutt, M.R. An ultracold molecular beam for testing fundamental physics. Quantum Sci. Technol. 2021, 6, 044005. [Google Scholar] [CrossRef]
- Herrmann, S.; Senger, A.; Möhle, K.; Nagel, M.; Kovalchuk, E.V.; Peters, A. Rotating optical cavity experiment testing Lorentz invariance at the 10−17 level. Phys. Rev. D 2019, 80, 105011. [Google Scholar] [CrossRef] [Green Version]
- Igel, H.; Schreiber, K.U.; Gebauer, A.; Bernauer, F.; Egdorf, S.; Simonelli, A.; Lin, C.-J.; Wassermann, J.; Donner, S.; Hadziioannou, C. Romy: A multi-component ring laser for geodesy and geophysics. Geophys. J. Int. 2021, 225, 684–698. [Google Scholar] [CrossRef]
- Nakamura, T.; Davila-Rodriguez, J.; Leopardi, H.; Sherman, J.A.; Fortier, T.M.; Xie, X.; Campbell, J.C.; McGrew, W.F.; Zhang, X.; Hassan, Y.S.; et al. Coherent optical clock down-conversion for microwave frequencies with 10−18 instability. Science 2020, 368, 889–892. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Bouchand, R.; Nicolodi, D.; Giunta, M.; Hänsel, W.; Lezius, M.; Joshi, A.; Datta, S.; Alexandre, C.; Lours, M.; et al. Photonic microwave signals with zeptosecond-level absolute timing noise. Nat. Photonics 2017, 11, 44–47. [Google Scholar] [CrossRef]
- Fortier, T.M.; Kirchner, M.S.; Quinlan, F.; Taylor, J.; Bergquist, J.C.; Rosenband, T.; Lemke, N.; Ludlow, A.; Jiang, Y.; Oates, C.W.; et al. Generation of ultrastable microwaves via optical frequency division. Nat. Photonics 2011, 5, 425–429. [Google Scholar] [CrossRef] [Green Version]
- Heinecke, D.C.; Bartels, A.; Diddams, S.A. Offset frequency dynamics and phase noise properties of a self-referenced 10 GHz Ti: Sapphire frequency comb. Opt. Express 2011, 19, 18440–18451. [Google Scholar] [CrossRef] [Green Version]
- Ohmae, N.; Sakama, S.; Katori, H. High-stability optical frequency transfer with all-fiber architecture for optical lattice clocks. Electron. Commun. Jpn. 2019, 102, 43–48. [Google Scholar] [CrossRef]
- Chiodo, N.; Quintin, N.; Stefani, F.; Wiotte, F.; Camisard, E.; Chardonnet, C.; Santarelli, G.; Amy-Klein, A.; Pottie, P.-E.; Lopez, O. Cascaded optical fiber link using the internet network for remote clocks comparison. Opt. Express 2015, 23, 33927–33937. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.K.; Han, B.W.; Cho, D. Automatic system to relock a laser frequency to a Fabry–Perot cavity. Rev. Sci. Instrum. 2005, 76, 026101. [Google Scholar] [CrossRef]
- Luo, Y.; Li, H.; Yeh, H.-C.; Luo, J. A self-analyzing double-loop digital controller in laser frequency stabilization for inter-satellite laser ranging. Rev. Sci. Instrum. 2015, 86, 044501. [Google Scholar] [CrossRef]
- Luo, Y.; Li, H.; Yeh, H.-C. Note: Digital laser frequency auto-locking for inter-satellite laser ranging. Rev. Sci. Instrum. 2016, 87, 056105. [Google Scholar] [CrossRef]
- Li, Q.-X.; Zhang, X.; Zhu, L.-X.; Yan, S.-H.; Jia, A.A.; Luo, Y.-K.; Wang, Y.-N.; Wei, C.-H.; Zhang, H.-K.; Lv, M.-J.; et al. Intelligent and automatic laser frequency locking system using pattern recognition technology. Opt. Lasers Eng. 2020, 126, 105881. [Google Scholar] [CrossRef]
- Vojir, T.; Noskova, J.; Matas, J. Robust scale-adaptive mean-shift for tracking. Pattern Recognit. Lett. 2014, 49, 250–258. [Google Scholar] [CrossRef]
- Ning, J.; Zhang, L.; Zhang, D.; Wu, C. Robust mean-shift tracking with corrected background-weighted histogram. IET Comput. Vis. 2012, 6, 62–69. [Google Scholar] [CrossRef] [Green Version]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, L.; Jiao, D.; Liu, J.; Chen, L.; Xu, G.; Zhang, L.; Liu, J.; Dong, R.; Liu, T.; Zhang, S. Prompt Frequency Stabilization of Ultra-Stable Laser via Improved Mean Shift Algorithm. Electronics 2022, 11, 1319. https://doi.org/10.3390/electronics11091319
Fan L, Jiao D, Liu J, Chen L, Xu G, Zhang L, Liu J, Dong R, Liu T, Zhang S. Prompt Frequency Stabilization of Ultra-Stable Laser via Improved Mean Shift Algorithm. Electronics. 2022; 11(9):1319. https://doi.org/10.3390/electronics11091319
Chicago/Turabian StyleFan, Le, Dongdong Jiao, Jun Liu, Long Chen, Guanjun Xu, Linbo Zhang, Jie Liu, Ruifang Dong, Tao Liu, and Shougang Zhang. 2022. "Prompt Frequency Stabilization of Ultra-Stable Laser via Improved Mean Shift Algorithm" Electronics 11, no. 9: 1319. https://doi.org/10.3390/electronics11091319
APA StyleFan, L., Jiao, D., Liu, J., Chen, L., Xu, G., Zhang, L., Liu, J., Dong, R., Liu, T., & Zhang, S. (2022). Prompt Frequency Stabilization of Ultra-Stable Laser via Improved Mean Shift Algorithm. Electronics, 11(9), 1319. https://doi.org/10.3390/electronics11091319