
Velocity-Free Formation Control and Collision Avoidance for UUVs via RBF: A High-Gain Approach


Abstract
:1. Introduction
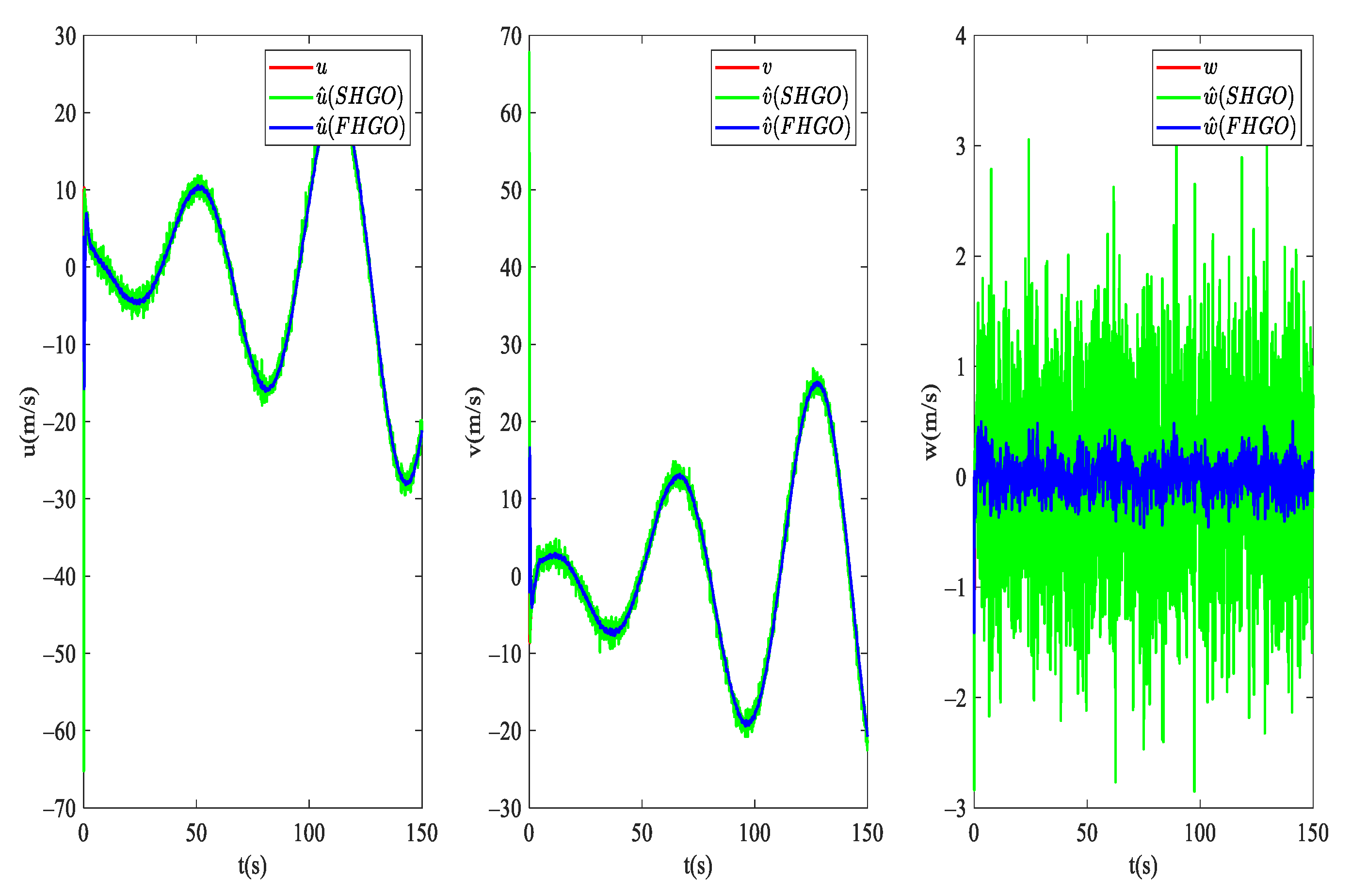
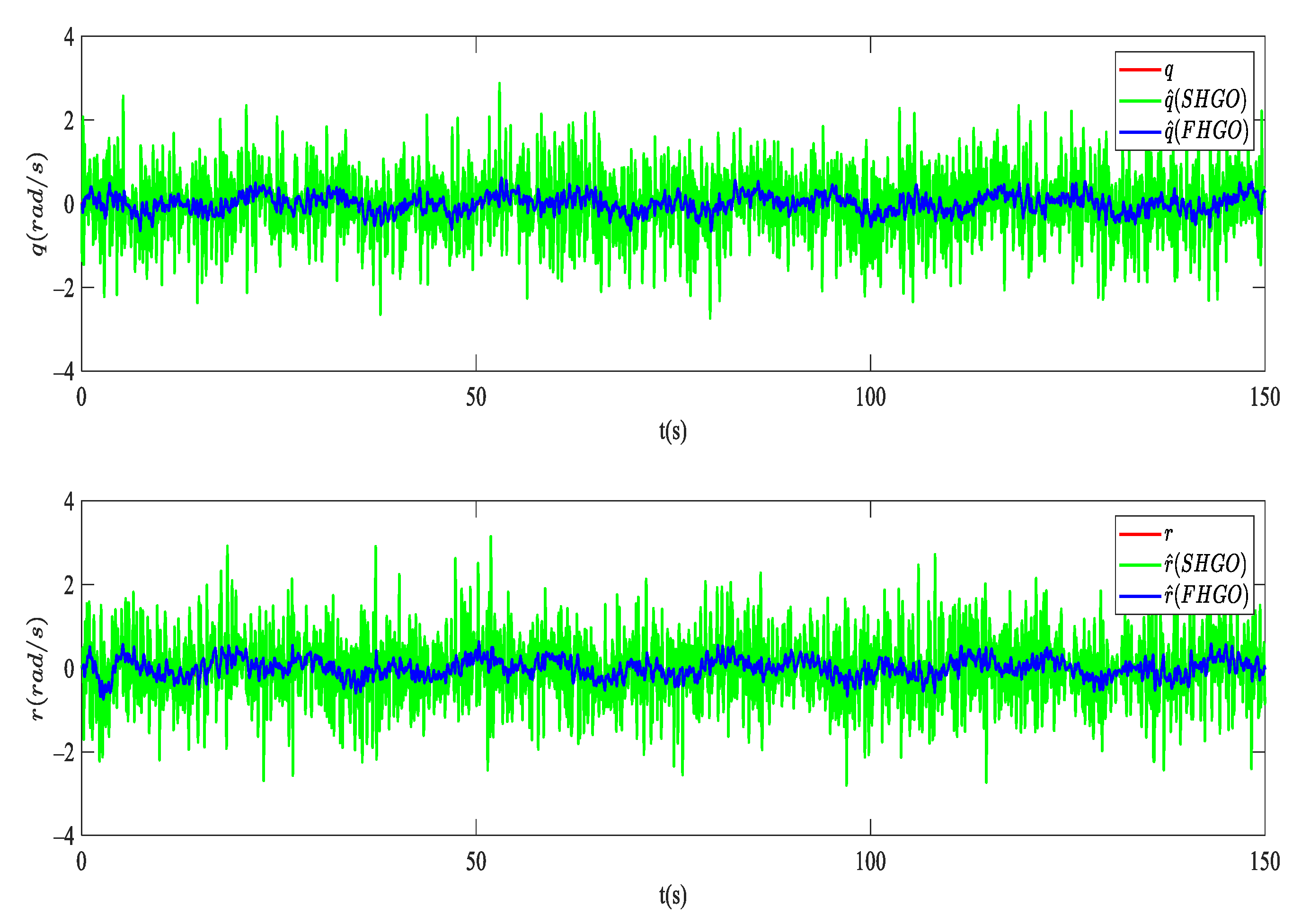
- An FHGO is designed to exactly estimate the states of UUVs to satisfy the so-called observer matching condition. Differently from [10], the input-to-state stability property of the estimation error is still preserved in the presence of measurement noise;
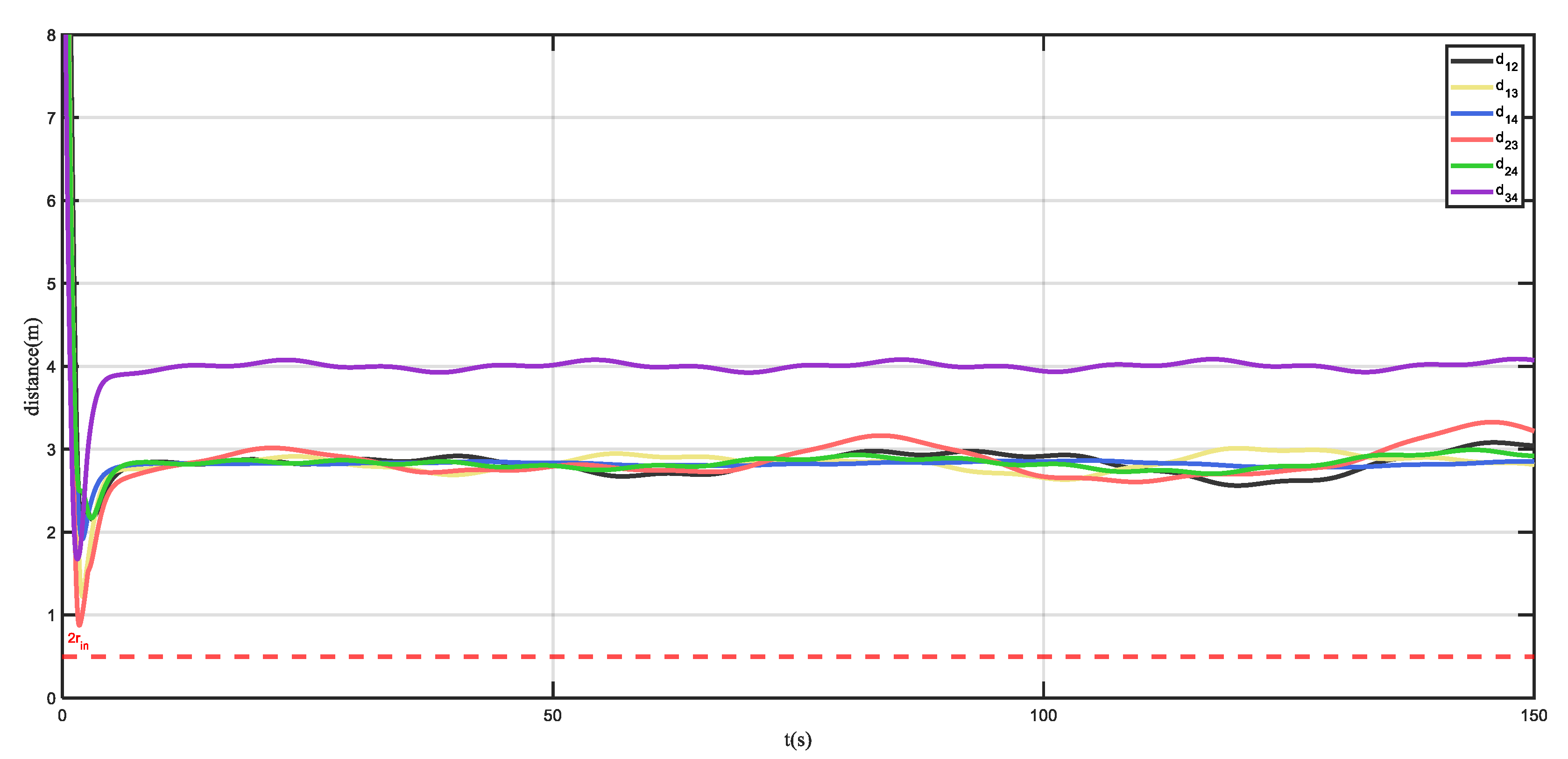
- An adaptive neural network formation control scheme is designed for UUV formation with collision avoidance under unknown disturbance. The RBF neural network is used to estimate the unknown disturbance. Studies on collision avoidance for multi-UUV formation are mostly on the 3-DOF model in the horizontal plane. The state feedback linearization method is used to transfer the nonlinear and coupling mathematical model of UUVs into a second-order system model in 5-DOF. The artificial potential field theory is applied to cope with collision avoidance among the UUVs. The form of the potential function is much simpler;
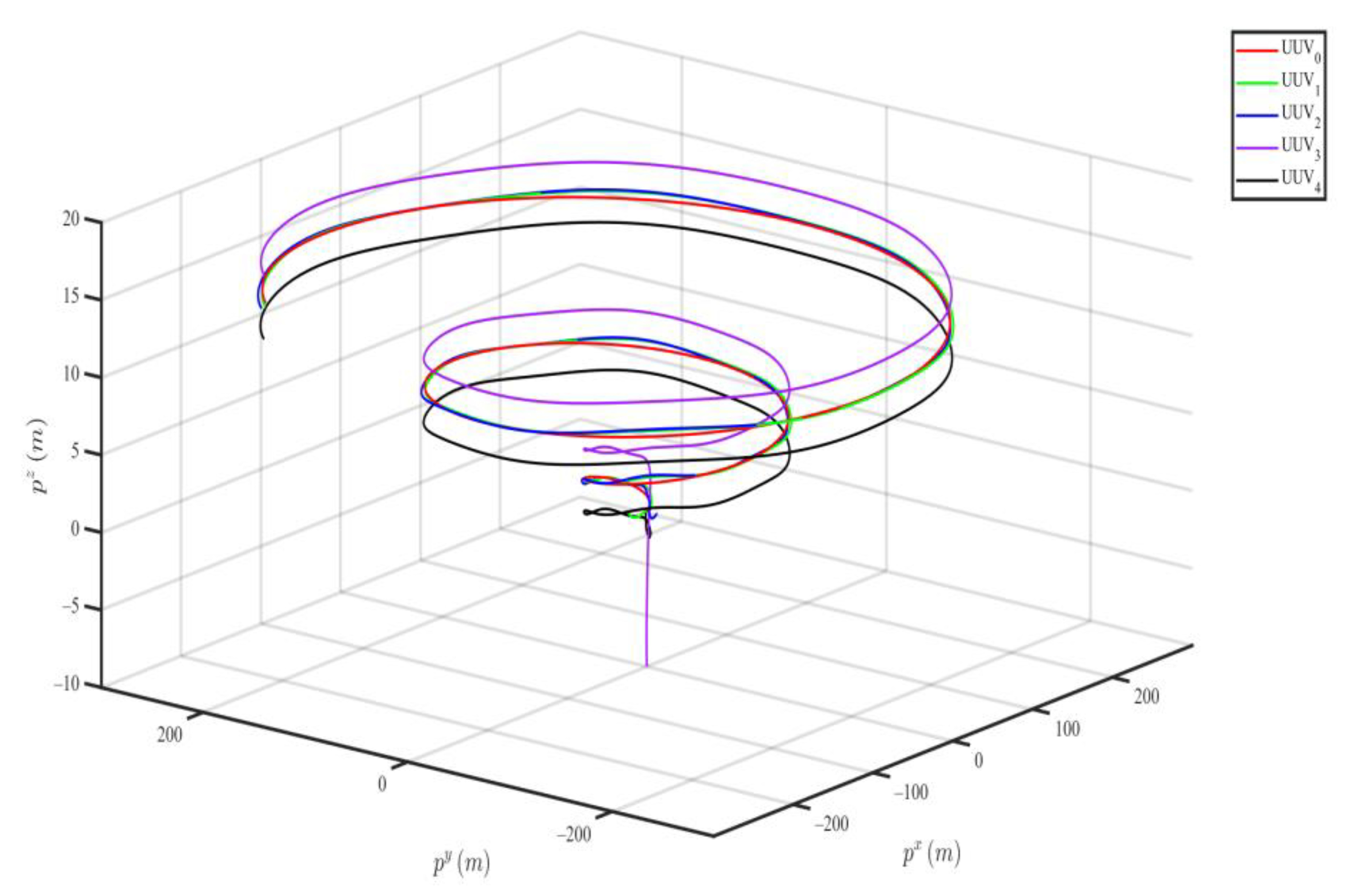
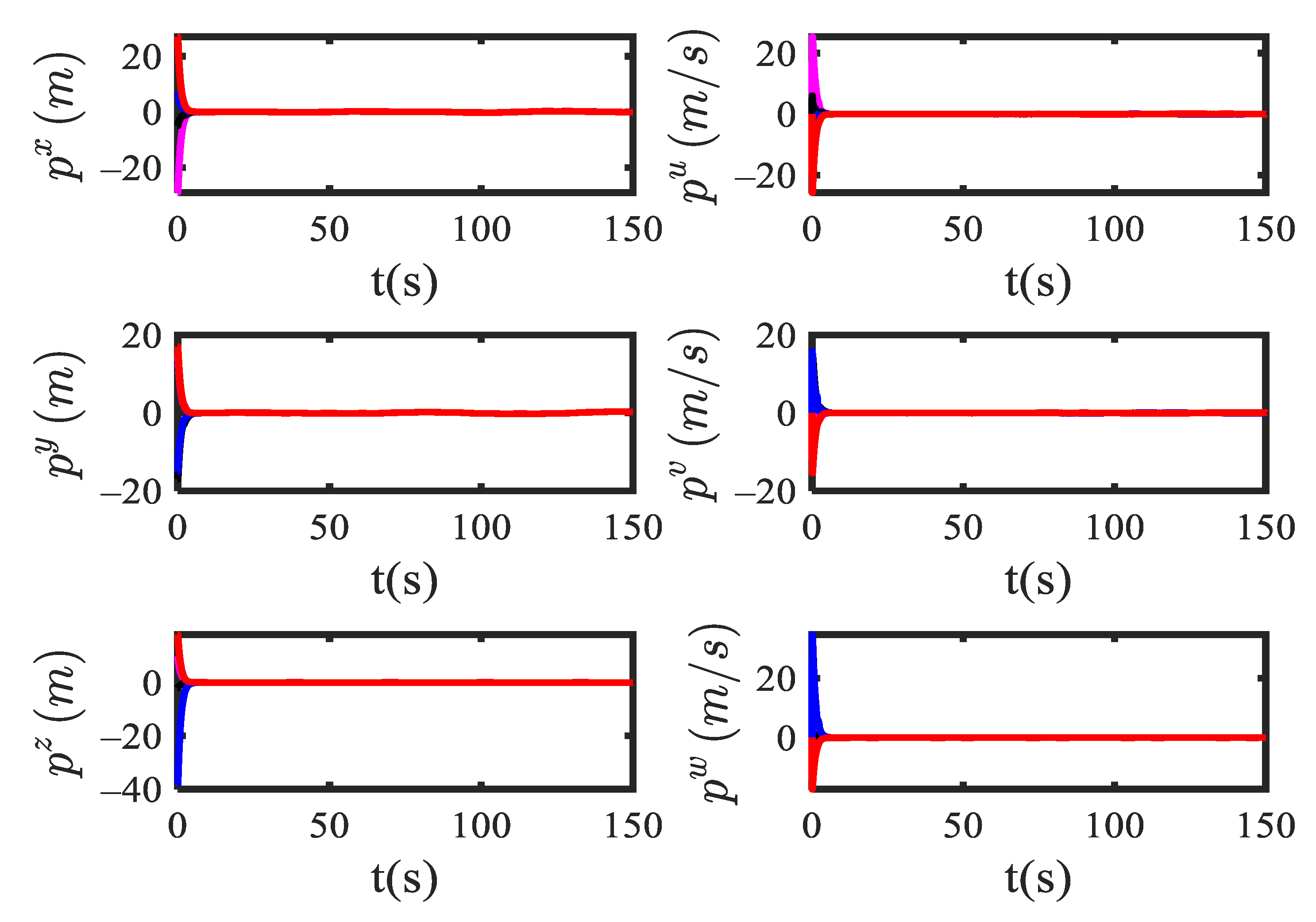
- Based on the Lyapunov theory, the stability of the formation system is proven. The proposed controller is valid and performs well, which can be found in the 3-D simulation figures.
2. Preliminaries and Problem Formulation
2.1. Graph Theory
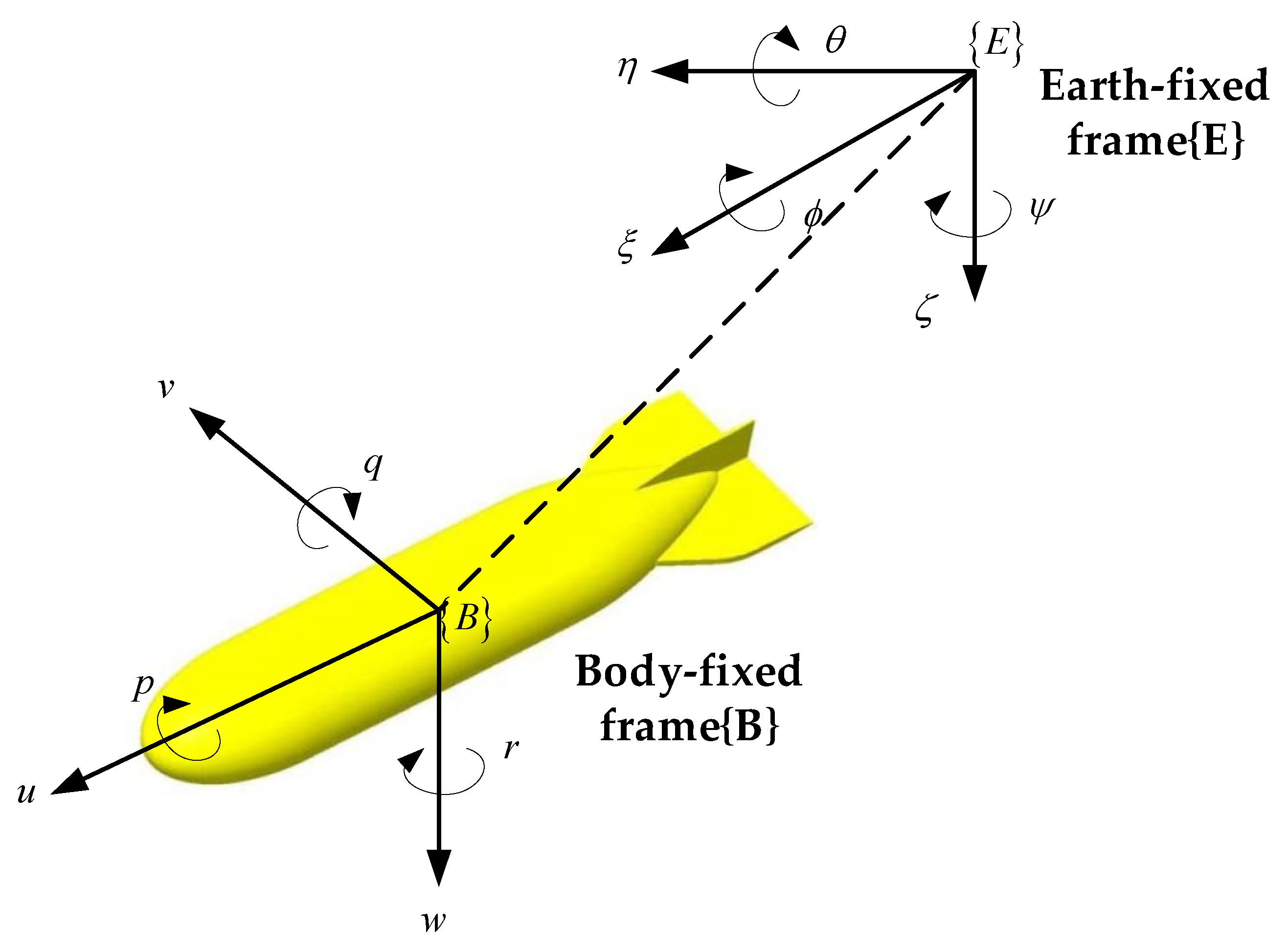
2.2. Feedback Linearization of UUV Model
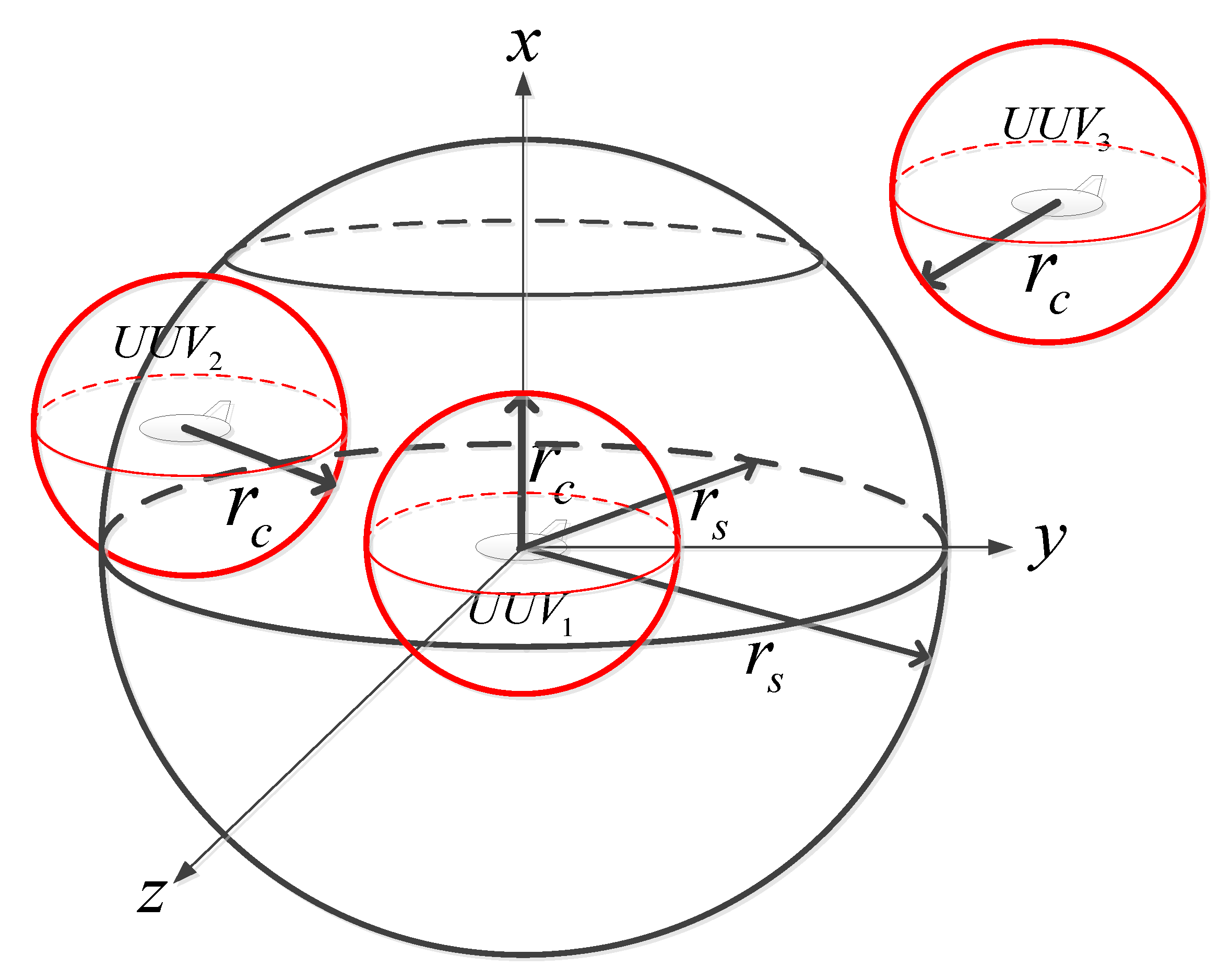
2.3. Artificial Potential Field and Virtual Repulsive
2.4. RBF Neural Network
2.5. Control Objective
3. Main Results
3.1. Filtered High-Gain Observer Design
3.2. Adaptive Neural Network Formation Control with Collision Avoidance under Unknown Disturbances
4. Simulation
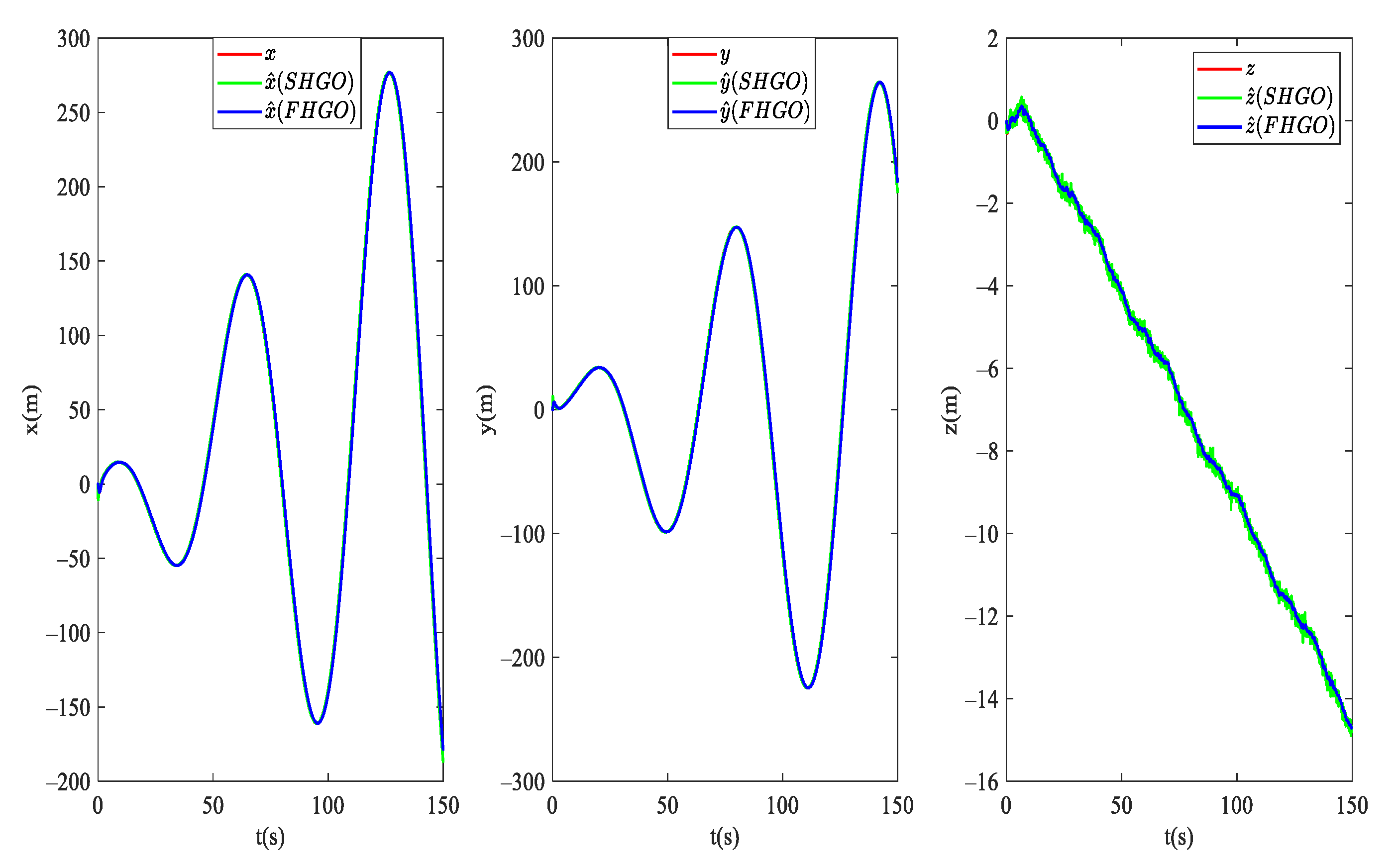
4.1. State Observer Simulation Result
4.2. Collision Avoidance Simulation Result
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, K.-B.; Wu, X.-K.; Ge, M.-F.; Liang, C.-D.; Hu, B.-L. Neural-Adaptive Finite-Time Formation Tracking Control of Multiple Nonholonomic Agents with a Time-Varying Target. IEEE Access 2020, 8, 62943–62953. [Google Scholar] [CrossRef]
- Li, X.; Wen, C.; Chen, C. Adaptive Formation Control of Networked Robotic Systems with Bearing-Only Measurements. IEEE Trans. Cybern. 2020, 51, 199–209. [Google Scholar] [CrossRef] [PubMed]
- Brinon-Arranz, L.; Renzaglia, A.; Schenato, L. Multirobot Symmetric Formations for Gradient and Hessian Estimation with Application to Source Seeking. IEEE Trans. Robot. 2019, 35, 782–789. [Google Scholar] [CrossRef]
- Park, B.S. Adaptive formation control of underactuated autonomous underwater vehicles. Ocean Eng. 2015, 96, 1–7. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Wei, Y.; Zhang, C. Neuroadaptive Sliding Mode Formation Control of Autonomous Underwater Vehicles with Uncertain Dynamics. IEEE Syst. J. 2019, 14, 3325–3333. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Fixed-time sliding mode formation control of AUVs based on a disturbance observer. IEEE/CAA J. Autom. Sin. 2020, 7, 539–545. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, G.; Sun, Z.; Zhang, W. Robust adaptive formation control of underactuated autonomous surface vessels based on MLP and DOB. Nonlinear Dyn. 2018, 94, 503–519. [Google Scholar] [CrossRef]
- Park, B.S.; Kwon, J.-W.; Kim, H. Neural network-based output feedback control for reference tracking of underactuated surface vessels. Automatica 2017, 77, 353–359. [Google Scholar] [CrossRef]
- Franze, G.; Casavola, A.; Famularo, D.; Lucia, W. Distributed Receding Horizon Control of Constrained Networked Leader–Follower Formations Subject to Packet Dropouts. IEEE Trans. Control Syst. Technol. 2017, 26, 1798–1809. [Google Scholar] [CrossRef]
- Astolfi, D.; Marconi, L.; Praly, L.; Teel, A. Sensitivity to High-Frequency Measurement Noise of Nonlinear High-Gain Observers. IFAC-PapersOnLine 2016, 49, 862–866. [Google Scholar] [CrossRef]
- Khalil, H.K.; Priess, S. Analysis of the Use of Low-Pass Filters with High-Gain Observers. IFAC-PapersOnLine 2016, 49, 488–492. [Google Scholar] [CrossRef]
- Abadi, A.S.S.; Hosseinabadi, P.A.; Mekhilef, S. Fuzzy Adaptive Fixed-time Sliding Mode Control with State Observer for A Class of High-order Mismatched Uncertain Systems. Int. J. Control. Autom. Syst. 2020, 18, 2492–2508. [Google Scholar] [CrossRef]
- Prasov, A.A.; Khalil, H.K. A nonlinear high-gain observer for systems with measurement noise in a feedback control frame-work. IEEE Trans Autom Control 2013, 58, 569–580. [Google Scholar] [CrossRef]
- Niu, B.; Duan, P.; Li, J.; Li, X. Adaptive Neural Tracking Control Scheme of Switched Stochastic Nonlinear Pure-Feedback Nonlower Triangular Systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 975–986. [Google Scholar] [CrossRef]
- Xu, N.; Zhao, X.; Zong, G.; Wang, Y. Adaptive control design for uncertain switched nonstrict-feedback nonlinear systems to achieve as-ymptotic tracking performance. Appl. Math. Comput. 2021, 408, 126344. [Google Scholar]
- Ma, L.; Xu, N.; Zhao, X.; Zong, G.; Huo, X. Small-Gain Technique-Based Adaptive Neural Output-Feedback Fault-Tolerant Control of Switched Nonlinear Systems with Unmodeled Dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7051–7062. [Google Scholar] [CrossRef]
- Sakai, D.; Fukushima, H.; Matsuno, F. Leader–Follower Navigation in Obstacle Environments While Preserving Connectivity without Data Transmission. IEEE Trans. Control Syst. Technol. 2017, 26, 1233–1248. [Google Scholar] [CrossRef] [Green Version]
- Dong, Y.; Su, Y.; Liu, Y.; Xu, S. An internal model approach for multi-agent rendezvous and connectivity preservation with nonlinear dynamics. Automatica 2018, 89, 300–307. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.L.P.; Liu, Y.-J. Formation Control with Obstacle Avoidance for a Class of Stochastic Multiagent Systems. IEEE Trans. Ind. Electron. 2017, 65, 5847–5855. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, S.J. An Error Transformation Approach for Connectivity-Preserving and Collision-Avoiding Formation Tracking of Networked Uncertain Underactuated Surface Vessels. IEEE Trans. Cybern. 2018, 49, 2955–2966. [Google Scholar] [CrossRef]
- Zhong, H.; Wang, Y.; Miao, Z.; Tan, J.; Li, L.; Zhang, H.; Fierro, R. Circumnavigation of a Moving Target in 3D by Multi-agent Systems with Collision Avoidance: An Orthogonal Vector Fields-based Approach. Int. J. Control. Autom. Syst. 2019, 17, 212–224. [Google Scholar] [CrossRef]
- He, S.; Wang, M.; Dai, S.-L.; Luo, F. Leader–Follower Formation Control of USVs with Prescribed Performance and Collision Avoidance. IEEE Trans. Ind. Inform. 2018, 15, 572–581. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, W.; Li, B.; Yang, Y.; Xiao, B. Finite-time formation tracking control with collision avoidance for quadrotor UAVs. J. Frankl. Inst. 2020, 357, 4034–4058. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Yan, Z.-P.; Liu, Y.-B.; Yu, C.-B.; Zhou, J.-J. Leader-following coordination of multiple UUVs formation under two independent topologies and time-varying delays. J. Cent. South Univ. 2017, 24, 382–393. [Google Scholar] [CrossRef]
- Shi, Q.; Li, T.; Li, J.; Chen, C.P.; Xiao, Y.; Shan, Q. Adaptive leader-following formation control with collision avoidance for a class of second-order nonlinear multi-agent systems. Neurocomputing 2019, 350, 282–290. [Google Scholar] [CrossRef]
- Wen, G.; Chen, C.L.P.; Dou, H.; Yang, H.; Liu, C. Formation control with obstacle avoidance of second-order multi-agent systems under directed communication topology. Sci. China Inf. Sci. 2019, 62, 192205. [Google Scholar] [CrossRef] [Green Version]
- Khalil, H.K.; Praly, L. High-gain observers in nonlinear feedback control. Int. J. Robust Nonlinear Control 2014, 24, 993–1015. [Google Scholar] [CrossRef]
- Pang, Z.H.; Zheng, C.B.; Sun, J.; Han, Q.L.; Liu, G.P. Distance- and velocity-based collision avoidance for time-varying formation control of sec-ond-order multi-agent systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 1253–1257. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entry | Value | Entry | Value | Entry | Value |
|---|---|---|---|---|---|
| 0 | 0 | 10 | |||
| 1 | 0 | 3 | |||
| 0.4 | 2 | 10 | |||
| 1.5 | 0.0001 | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Z.; Jiang, A.; Lai, C.; Li, H. Velocity-Free Formation Control and Collision Avoidance for UUVs via RBF: A High-Gain Approach. Electronics 2022, 11, 1170. https://doi.org/10.3390/electronics11081170
Yan Z, Jiang A, Lai C, Li H. Velocity-Free Formation Control and Collision Avoidance for UUVs via RBF: A High-Gain Approach. Electronics. 2022; 11(8):1170. https://doi.org/10.3390/electronics11081170
Chicago/Turabian StyleYan, Zheping, Anzuo Jiang, Chonglang Lai, and Heng Li. 2022. "Velocity-Free Formation Control and Collision Avoidance for UUVs via RBF: A High-Gain Approach" Electronics 11, no. 8: 1170. https://doi.org/10.3390/electronics11081170
APA StyleYan, Z., Jiang, A., Lai, C., & Li, H. (2022). Velocity-Free Formation Control and Collision Avoidance for UUVs via RBF: A High-Gain Approach. Electronics, 11(8), 1170. https://doi.org/10.3390/electronics11081170