
Vibration Prediction of Flying IoT Based on LSTM and GRU


Abstract
:1. Introduction
2. Methodologies
2.1. Proposed Vibration Prediction Method
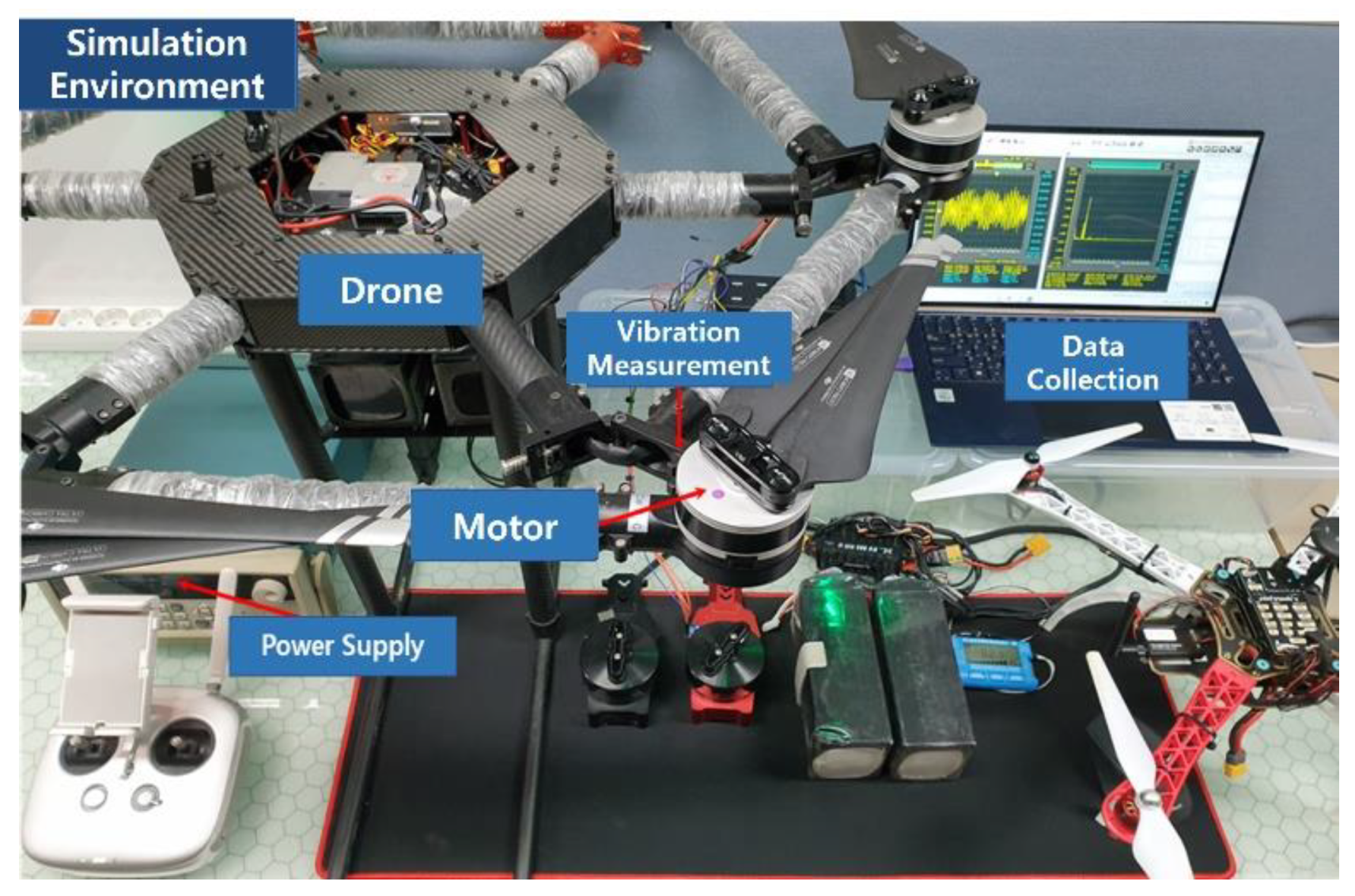
2.2. Collection of Time Series Vibration Data
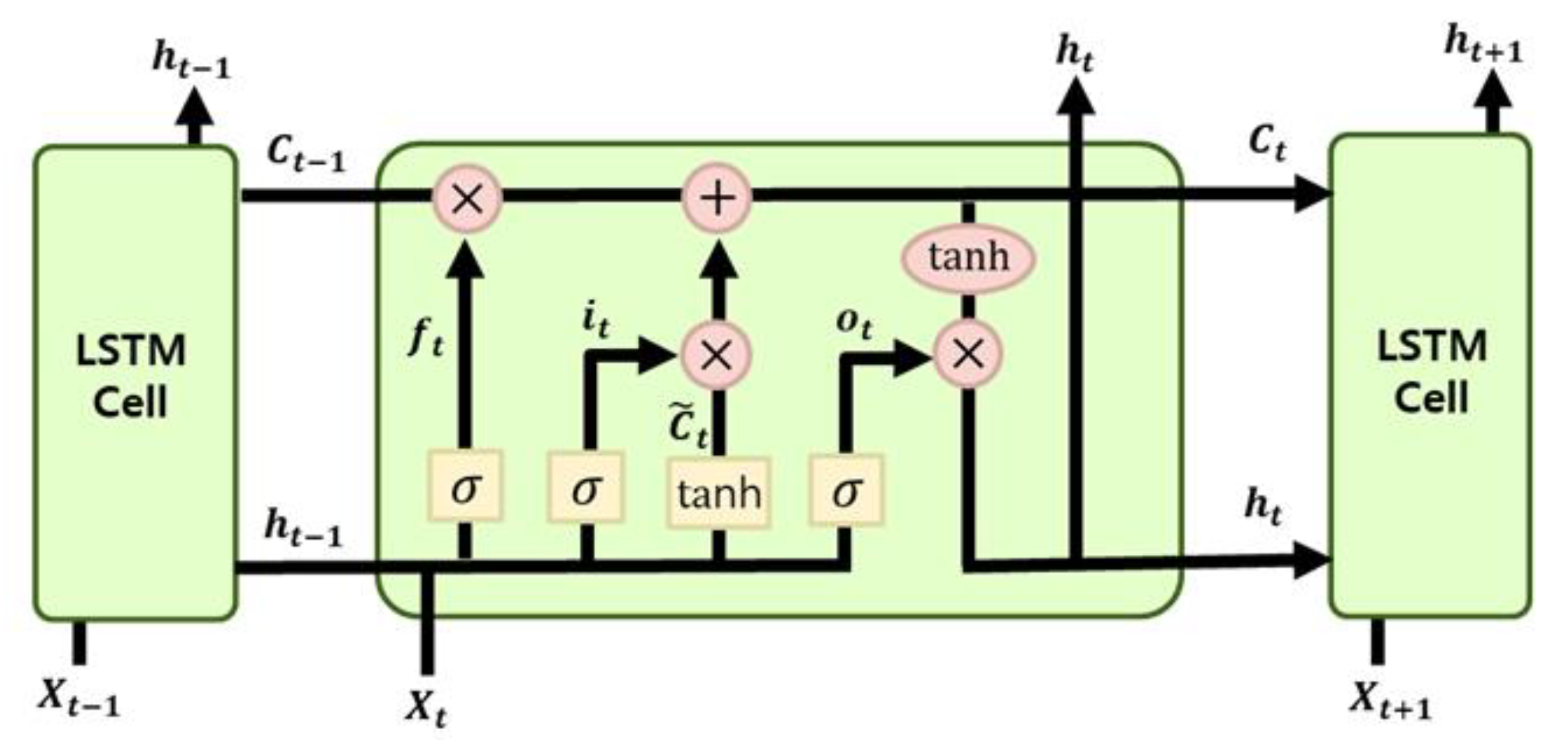
2.3. Vibration Prediction with LSTM
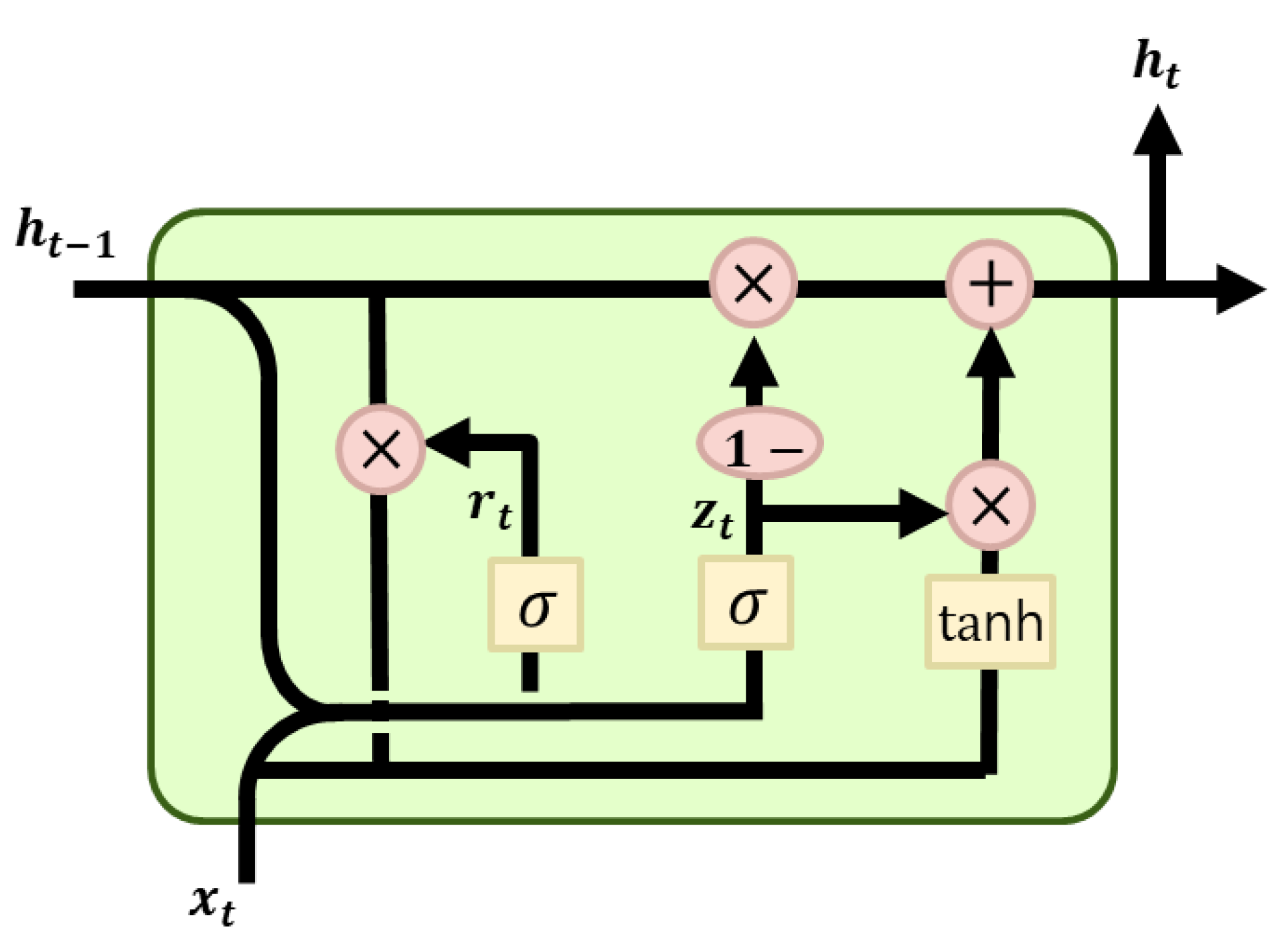
2.4. Vibration Prediction with GRU
3. Simulation Results
3.1. Simulation Parameters
3.2. Comparative Analysis of Vibration Forecasting
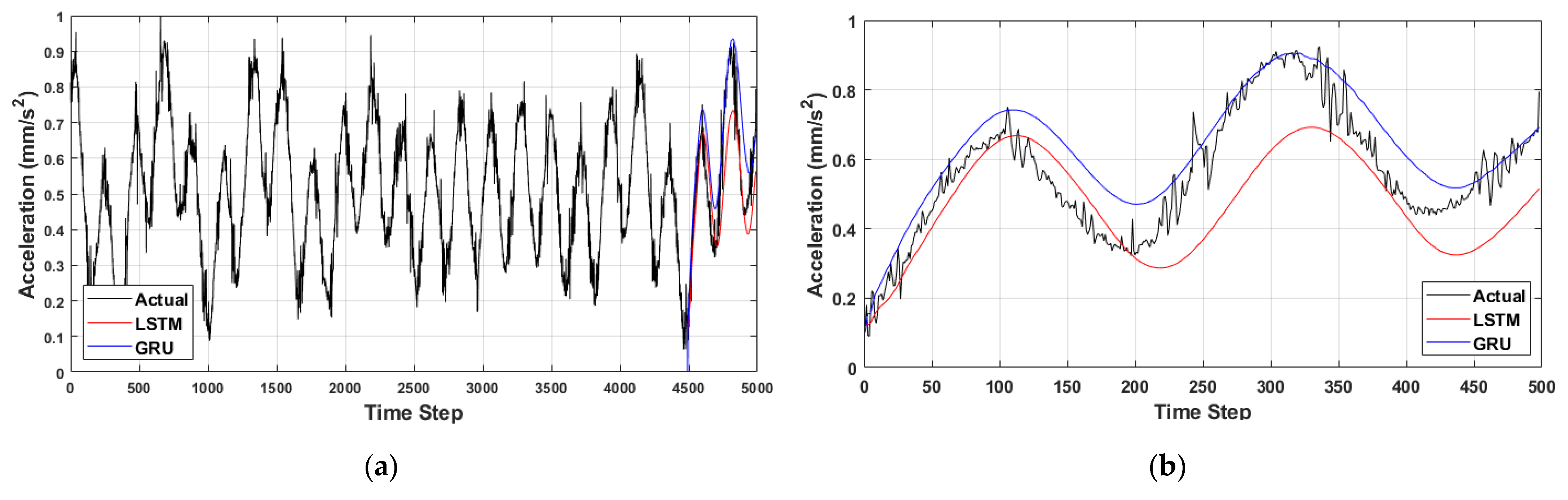
3.2.1. Normal Motor
3.2.2. Motor with Low Power
3.2.3. Motor with a Bent Shaft
3.2.4. Motor with a Damaged Rotor
3.3. Comparison of Prediction Accuracy
3.4. Comparison of RMSE and Simulation Time
4. Conclusions
- (1)
- In normal vibration, the value between the vibration value predicted using LSTM and GRU is the highest and the value decreases as the motor vibrates irregularly;
- (2)
- GRU showed lower average RMSE values than LSTM in a normal motor, a motor with low power, and a motor with a bent shaft, excluding a motor with a damaged rotor, but the difference is very small;
- (3)
- Both GRU and LSTM accurately predict future vibrations, but GRU predict future vibrations at an average speed of about 22.79% faster than LSTM.
Funding
Data Availability Statement
Conflicts of Interest
References
- Genc, H.; Zu, Y.; Chin, T.-W.; Halpern, M.; Reddi, V.J. Flying IoT: Toward Low-Power Vision in the Sky. IEEE Micro. 2017, 37, 40–51. [Google Scholar] [CrossRef]
- Gupta, L.; Jain, R.; Vaszkun, G. Survey of Important Issues in UAV Communication Networks. IEEE Commun. Surv. Tuts. 2016, 18, 1123–1152. [Google Scholar] [CrossRef] [Green Version]
- Yao, P.; Zhu, Q.; Zhao, R. Gaussian Mixture Model and Self-Organizing Map Neural-Network-Based Coverage for Target Search in Curve-Shape Area. IEEE Trans. Cybern. 2020, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Yao, P.; Xie, Z.; Ren, P. Optimal UAV Route Planning for Coverage Search of Stationary Target in River. IEEE Trans. Control Syst. Technol. 2019, 27, 822–829. [Google Scholar] [CrossRef]
- Agha-mohammadi, A.; Ure, N.K.; How, J.P.; Vian, J. Health Aware Stochastic Planning for Persistent Package Delivery Missions using Quadrotors. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 3389–3396. [Google Scholar]
- Yao, P.; Wang, H.; Ji, H. Gaussian Mixture Model and Receding Horizon Control for Multiple UAV Search in Complex Environment. Nonlinear Dyn. 2017, 88, 903–919. [Google Scholar] [CrossRef]
- Stodola, P.; Drozd, J.; Mazal, J.; Hodický, J.; Procházka, D. Cooperative Unmanned Aerial System Reconnaissance in a Complex Urban Environment and Uneven Terrain. Sensors 2019, 19, 3754. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Guo, J.; Liu, C.; Xiong, H.; Chai, L.; He, D. Precision Landing Test and Simulation of the Agricultural UAV on Apron. Sensors 2020, 20, 3369. [Google Scholar] [CrossRef]
- Mazzia, V.; Comba, L.; Khaliq, A.; Chiaberge, M.; Gay, P. UAV and Machine Learning Based Refinement of a Satellite-Driven Vegetation Index for Precision Agriculture. Sensors 2020, 20, 2530. [Google Scholar] [CrossRef]
- Schroth, L. The Drone Market Size 2020–2025: 5 Key Takeaways; Drone Industry Insights UG: Hamburg, Germany, 2020. [Google Scholar]
- Product Safety Team. Drone Safety Status Survey Results; Korea Consumer Agency: Chungbuk Innovation City, Korea, 2017. [Google Scholar]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning Long-term Dependencies with Gradient Descent is Difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Chung, J.; Gülçehre, Ç.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. In Proceedings of the NIPS 2014 Workshop on Deep Learning, Montreal, QC, Canada, 8–13 December 2014. [Google Scholar]
- Guo, D.; Zhong, M.; Ji, H.; Liu, Y.; Yang, R. A Hybrid Feature Model and Deep Learning based Fault Diagnosis for Unmanned Aerial Vehicle Sensors. Neurocomputing 2018, 319, 155–163. [Google Scholar] [CrossRef]
- Xiao, L.; Sun, D.; Liu, Y.; Huang, Y. A Combined Method Based on Expert System and BP Neural Network for UAV Systems Fault Diagnosis. In Proceedings of the 2010 International Conference on Artificial Intelligence and Computational Intelligence, Sanya, China, 23–24 October 2010; pp. 23–24. [Google Scholar]
- Wang, Z.; Qian, H.; Zhang, D.; Wei, Y. Prediction Model Design for Vibration Severity of Rotating Machine Based on Sequence-to-Sequence Neural Network. Math. Probl. Eng. 2019, 2019, 4670982. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, Z.; Wang, Z.; Wang, X. Fault Detection and Identification Method for Quadcopter Based on Airframe Vibration Signals. Sensors 2021, 21, 581. [Google Scholar] [CrossRef] [PubMed]
- Glowacz, A.; Glowacz, W.; Kozik, J.; Piech, K.; Gutten, M.; Caesarendra, W.; Liu, H.; Brumercik, F.; Irfan, M.; Khan, Z.F. Detection of Deterioration of Three-phase Induction Motor Using Vibration Signals. Meas. Sci. Rev. 2019, 19, 241–249. [Google Scholar] [CrossRef] [Green Version]
- Om, S.-Y.; Park, J.; Kim, Y.-H. Implementation of Abnormality Diagnosis System for Drone Power Unit by Using Vibration Sensor. J. Korean Inst. Inf. Technol. 2020, 18, 69–76. [Google Scholar] [CrossRef]
- Khan, T.; Alekhya, P.; Seshadrinath, J. Incipient Inter-turn Fault Diagnosis in Induction Motors using CNN and LSTM based Methods. In Proceedings of the 2018 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 23–27 September 2018; pp. 1–6. [Google Scholar]
- Tian, H.; Ren, D.; Li, K.; Zhao, Z. An Adaptive Update Model based on improved Long Short Term Memory for Online Prediction of Vibration Signal. J. Intell. Manuf. 2020, 32, 37–49. [Google Scholar] [CrossRef]
- Xiao, D.; Huang, Y.; Zhang, X.; Shi, H.; Liu, C.; Li, Y. Fault Diagnosis of Asynchronous Motors Based on LSTM Neural Network. In Proceedings of the 2018 Prognostics and System Health Management Conference, Chongqing, China, 26–28 October 2018; pp. 540–545. [Google Scholar]
- Hong, J.-K.; Lee, Y.-K. LSTM-based Anomal Motor Vibration Detection. In Proceedings of the 21st ACIS International Winter Conference on Software Engineering, Artificial Intelligence, Networking and Parallel/Distributed Computing, Kanazawa, Japan, 20–22 June 2021; pp. 98–99. [Google Scholar]
- ElSaid, A.; Wild, B.; Higgins, J.; Desell, T. Using LSTM Recurrent Neural Networks to Predict Excess Vibration Events in Aircraft Engines. In Proceedings of the 2016 IEEE 12th International Conference on e-Science, Baltimore, MD, USA, 23–27 October 2016; pp. 260–269. [Google Scholar]
- Wang, R.; Feng, Z.; Huang, S.; Fang, X.; Wang, J. Research on Voltage Waveform Fault Detection of Miniature Vibration Motor Based on Improved WP-LSTM. Micromachines 2020, 11, 753. [Google Scholar] [CrossRef]
- Liang, J.; Wang, L.; Wu, J.; Liu, Z.; Yu, G. Prediction of Spindle Rotation Error through Vibration Signal based on Bi-LSTM Classification Network. 2021 IOP Conf. Ser. Mater. Sci. Eng. 2021, 1043, 1–11. [Google Scholar] [CrossRef]
- Yang, Y.; Qin, N.; Huang, D.; Fu, Y. Fault Diagnosis of High-Speed Railway Bogies Based on LSTM. In Proceedings of the 2018 5th International Conference on Information, Cybernetics, and Computational Social Systems, Hangzhou, China, 16–19 August 2018; pp. 393–398. [Google Scholar]
- Xiao, D.; Huang, Y.; Qin, C.; Shi, H.; Li, Y. Fault Diagnosis of Induction Motors Using Recurrence Quantification Analysis and LSTM with Weighted BN. Shock Vib. 2019, 2019, 8325218. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Ma, H.; Ji, L.; Zhuang, J.; Wang, J.; Liu, B. Vibration Trend Prediction of Pumped Storage Units based on VMD and GRU. In Proceedings of the 2020 5th International Conference on Mechanical, Control and Computer Engineering 2020, Harbin, China, 25–27 December 2020; pp. 180–183. [Google Scholar]
- Lee, K.; Kim, J.-K.; Kim, J.; Hur, K.; Kim, H. CNN and GRU Combination Scheme for Bearing Anomaly Detection in Rotating Machinery Health Monitoring. In Proceedings of the 2018 1st IEEE International Conference on Knowledge Innovation and Invention (ICKII), Jeju Island, Korea, 23–27 July 2018; pp. 102–105. [Google Scholar]
- Ma, M.; Mao, Z. Deep Wavelet Sequence-Based Gated Recurrent Units for the Prognosis of Rotating Machinery. Struct. Health Monit. 2021, 4, 1794–1804. [Google Scholar] [CrossRef]
- Zhao, K.; Shao, H. Intelligent Fault Diagnosis of Rolling Bearing Using Adaptive Deep Gated Recurrent Unit. Neural Processing Letters 2020, 51, 1165–1184. [Google Scholar] [CrossRef]
- Zhao, K.; Jiang, H.; Li, X.; Wang, R. An Optimal Deep Sparse Autoencoder with Gated Recurrent Unit for Rolling Bearing Fault Diagnosis. Meas. Sci. Technol. 2019, 31, 015005. [Google Scholar] [CrossRef]
- Li, X.; Li, J.; Qu, Y.; He, D. Gear Pitting Fault Diagnosis Using Integrated CNN and GRU Network with Both Vibration and Acoustic Emission Signals. Appl. Sci. 2019, 9, 768. [Google Scholar] [CrossRef] [Green Version]
- Yuan, M.; Wu, Y.; Lin, L. Fault Diagnosis and Remaining Useful Life Estimation of Aero Engine using LSTM Neural Network. In Proceedings of the 2016 IEEE international conference on aircraft utility systems (AUS), Beijing, China, 10–12 October 2016; pp. 135–140. [Google Scholar]
- Demidova, L.A. Recurrent Neural Networks’ Configurations in the Predictive Maintenance Problems. IOP Conf. Ser. Mater. Sci. Eng. 2020, 714, 012005. [Google Scholar] [CrossRef]
- Naren, R.; Subhashini, J. Comparison of Deep Learning Models for Predictive Maintenance. IOP Conf. Ser. Mater. Sci. Eng. 2020, 912, 022029. [Google Scholar] [CrossRef]
- Chen, B.; Peng, Y.; Gu, B.; Luo, Y.; Liu, D. A Fault Detection Method Based on Enhanced GRU. In Proceedings of the 2021 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence (ICSMD), Nanjing, China, 21–23 October 2021; pp. 1–4. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Studies | Purpose | Methods | Evaluation Criteria |
|---|---|---|---|
| Wang et al. [17] | Vibration prediction of turbine | LSTM, GRU | RMSE, MAPE, MSE, and convergence time |
| Yuan et al. [36] | Fault diagnosis of aircraft engine | RNN, LSTM, GRU | MSE and relative errors |
| Demidova [37] | Predictive maintenance of aircraft engine | RNN, LSTM, GRU | Train and test accuracies and simulation time |
| Naren et al. [38] | Predictive maintenance of aircraft engine | RNN, LSTM, GRU | Simulation time and |
| Chen et al. [39] | Fault detection of drone | LSTM, GRU | RMSE |
| This work | Vibration prediction of drone | LSTM, GRU | RMSE, simulation time, and |
| Motor Type | Description of Abnormalities | |
|---|---|---|
| Normal motor |  | If enough power is supplied and there is no external impact, motor vibrations have constant period and acceleration values. |
| Low power |  | This abnormality occurs due to damaged coils or a low battery level. If it occurs, the motor’s rotating speed decreases and the acceleration of vibration becomes irregular. |
| Bent shaft |  | When the shaft is bent due to external impact, it causes the shaking of the motor, which produces vibrations with constant period and irregular acceleration values. |
| Damaged rotor |  | If a foreign object is inserted between the stator and the rotor, the rotor is damaged, and it causes no significant changes in the acceleration of vibration but leads to changes in the period of vibration. |
| Parameter | Value |
|---|---|
| No. of hidden units | 200 |
| Initial learning rate | 0.005 |
| No. of epochs | 500 |
| Learn rate drop factor | 0.1 |
| Learn rate drop period | 10 |
| Minimum batch size | 64 |
| Optimizer | Adam |
| Type of Motor | LSTM | GRU |
|---|---|---|
| Normal motor | 0.98 | 0.98 |
| Motor with low power | 0.95 | 0.94 |
| Motor with a bent shaft | 0.71 | 0.87 |
| Motor with a damaged rotor | 0.51 | 0.52 |
| Average | 0.79 | 0.83 |
| Type of Motor | Avg. RMSE | Avg. Simulation Time (s) | ||||
|---|---|---|---|---|---|---|
| LSTM | GRU | Difference | LSTM | GRU | Efficiency | |
| Normal motor | 0.0595 | 0.0559 | 0.0036 | 108.68 | 87.88 | 23.36% |
| Motor with low power | 0.1054 | 0.0822 | 0.0232 | 108.99 | 88.35 | 23.67% |
| Motor with a bent shaft | 0.1567 | 0.1462 | 0.0105 | 108.15 | 88.65 | 22.34% |
| Motor with a damaged rotor | 0.1514 | 0.1878 | 0.0364 | 107.90 | 88.60 | 21.79% |
| Average | 0.1182 | 0.1180 | 0.0184 | 126.43 | 88.37 | 22.79% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, J.-K. Vibration Prediction of Flying IoT Based on LSTM and GRU. Electronics 2022, 11, 1052. https://doi.org/10.3390/electronics11071052
Hong J-K. Vibration Prediction of Flying IoT Based on LSTM and GRU. Electronics. 2022; 11(7):1052. https://doi.org/10.3390/electronics11071052
Chicago/Turabian StyleHong, Jun-Ki. 2022. "Vibration Prediction of Flying IoT Based on LSTM and GRU" Electronics 11, no. 7: 1052. https://doi.org/10.3390/electronics11071052
APA StyleHong, J.-K. (2022). Vibration Prediction of Flying IoT Based on LSTM and GRU. Electronics, 11(7), 1052. https://doi.org/10.3390/electronics11071052