Effects of Communication Signal Delay on the Power Grid: A Review



Abstract
1. Introduction

- Indicate the causes and effects of communication delays in the power system and research activities in these specific areas.
- Develop a plan to reduce or compensate strategies for the impact of communication delays in the power system.
- To test the simulation of the performance of a given algorithm, its performance is compared to other development methods tested on the widely used system in the literature.
- Examines how the system can be delayed in dealing with cyber-attacks that can cause delays.
- Therefore, this review aims to demonstrate the status of the problem and to show a new research direction provided can be a guideline for different researchers.
2. Previous and Current Related Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No. | Reference No. | Parameter/Area/Network |
|---|---|---|
| 1 | [4,14,15,16,18,25,30,31,33,35,36,37,38,46] | Model/Sampling Based Networks |
| 2 | [21,22,24,36,40,42,43,48,55,58,67,68,69] | Stability Analysis/Approach |
| 3 | [9,14,15,16,18,20,22,26,27,28,31,33,34,35,36,37,39,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63] | Time Delay/Fault/Track/Detection/Packet Loss |
| 4 | [4,11,12,17,25,26,30,31,32,34,39,41,42,50,52,54,56,64] | Internet/Communication Based Multi-Rate Control Networks |
| 5 | [16,17] | Distributed Networked Control Approach |
| 6 | [17,25,28,32,37,60,65] | Event Based Networks/Interactive Networks |
| 7 | [59,61,62,70,71,72,73,74] | Compensate network/Compensation strategies |
| S. No. | Reference No. | NCS Topology |
|---|---|---|
| 1 | [12,17,30,33,41,44] | Centralized Topology |
| 2 | [16,36,37,38,64,67,75] | Decentralized Topology |
| 3 | [37,38,53,55,56,57,58,64,66,68,70,71,76] | Distributed Topology |
| Present Work | Previous Work | |||
|---|---|---|---|---|
| S. No. | Pros | Cons | Pros | Cons |
| 1 | Minimizing outages and their effects | Overhead costs | It is easy to implement | Network model is limited |
| 2 | Automatic processes and user controls | Expensive | Capacity | The method can be expensive |
| 3 | Incorporate more renewable energy resources | Time-consuming | Various network configurations can be easily analyzed | Some method limits inaccuracies |
| 4 | Communication technologies and autonomous networks | Hacks or other malware attacks | Cost effective, reliable, suitable for establishing back bone communication infrastructure | Low bandwidth |
| 5 | Corporate IT departments and Safety factor increases | Complexity and congestion | Closing the gap between periodic tests | |
| 6 | Asset management and High channel capacity, data rates | Low range of capacities for distributed generation | Introduction of LAN in substations and interactive networks | |
| 7 | Rapid installation and wide range of applications | Merging protection and SCADA networks | ||
| 8 | Effective reduction of system complexity | Basic data collection and long delay | ||
3. A Robust Telecommunications Analysis Based on the Power of the Control System and the Network Caused by the Delay and the Packet Dropout
| Reference No. | Type of Delay | Delay/Delay Range (in ms) | Merits |
|---|---|---|---|
| [81] (2019) | Random Delay | 0 to 100 | Secure the system |
| [86] (2020) | Random Delay | 30 to 300 | Maintain operational stability |
| [87] (2018) | Network-Induced Time Delay | 0 to 700 | Identify the distribution of time delay |
| [88] (2021) | Constant Delay | 300 and 500 | Improving the stability of the power system |
| [62] (2021) | Time-Varying Delay | 100 to 500 | Increases the transfer capabilities in tie |
| [89] (2021) | Variable Delay | 50 to 100 | attenuate the influence |
4. Compensation for Electricity-Based Communication and Network Latency
4.1. Evaluations between Direct and Indirect Methods
4.2. Nonlinear Control
4.2.1. Sliding Mode Control
- Step 1: Describes the switching work: the switching work is planned to protect the framework while sliding in a dynamic manner.
- Step 2: Define a switched control law: the switched control law is designed to move the framework state vector to the sliding mode and maintain it once it arrives.
4.2.2. Fuzzy Logic Control
- Step 1: Fuzzily (Make membership work): this step includes mapping numerical input parameters to fuzzy factors for a characterized membership work.
- Step 2: Indicate the run the show table: this alludes to making a run the show table to determine all combinations of input signals and compare output signals for these input signals.
- Step 3: Defuzzily the outcomes: it includes producing numerical input values which can be utilized as control inputs of a control framework, based on the outputs of the fuzzy rules.
4.2.3. Neural Network Control
4.2.4. Comparisons of Remuneration Approaches
5. Results and Discussion of the Literature Reviewed
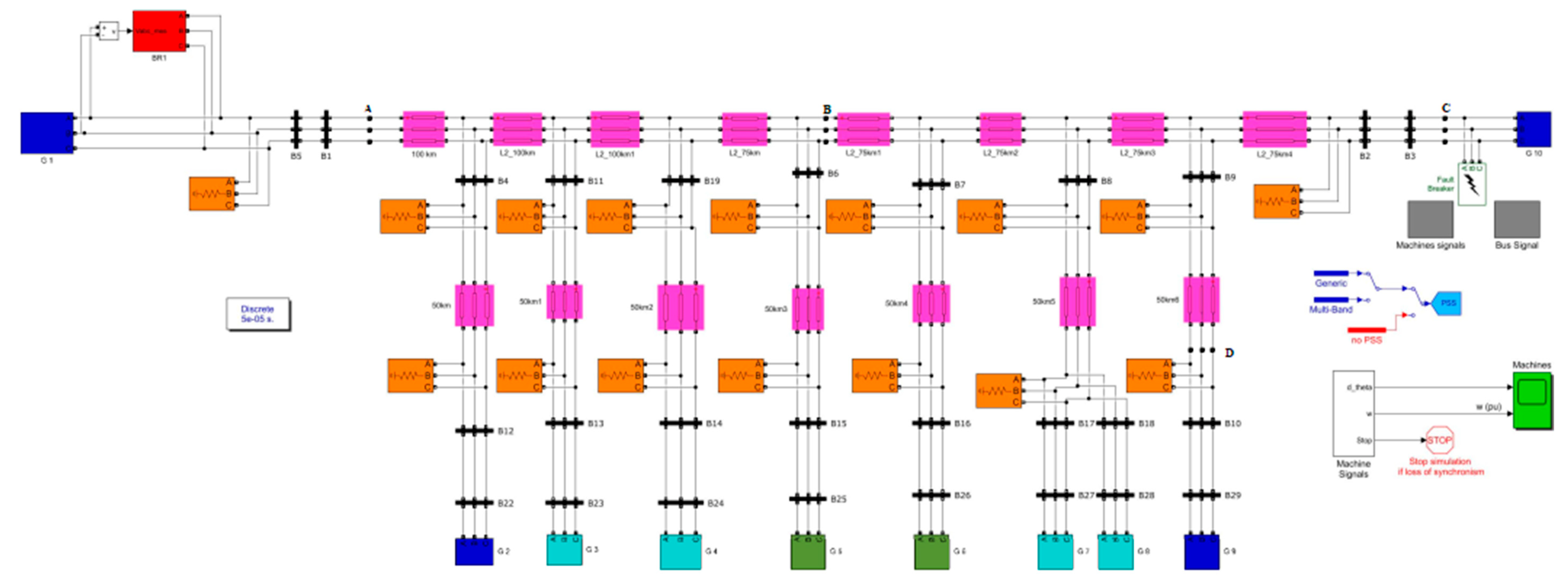
5.1. IEEJ West 10-Machine Model System Results
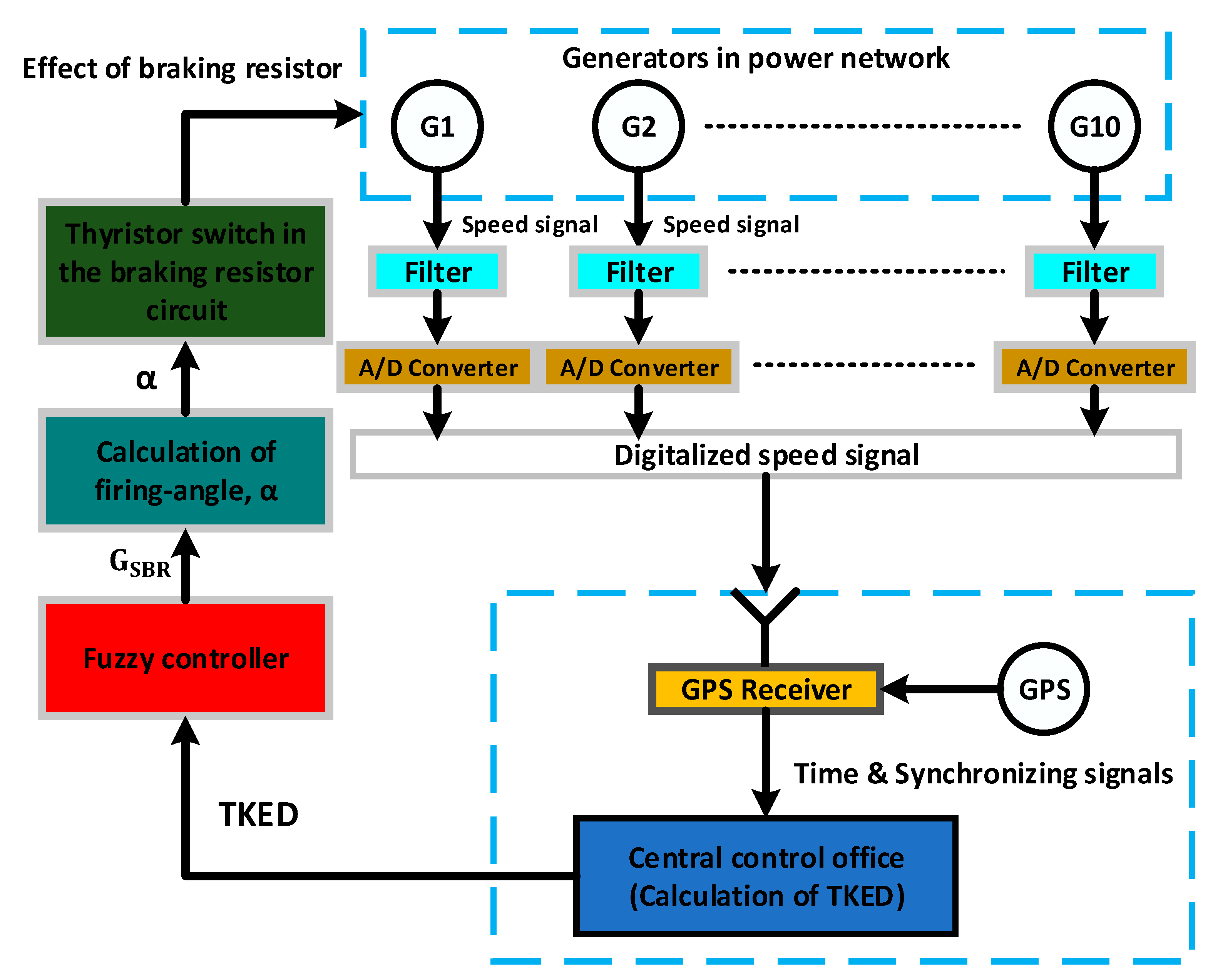
5.1.1. Scheme of Fuzzy Logic Controller
Fuzzification
Fuzzy Rule Table
Fuzzy Inference
Fuzzy Inference
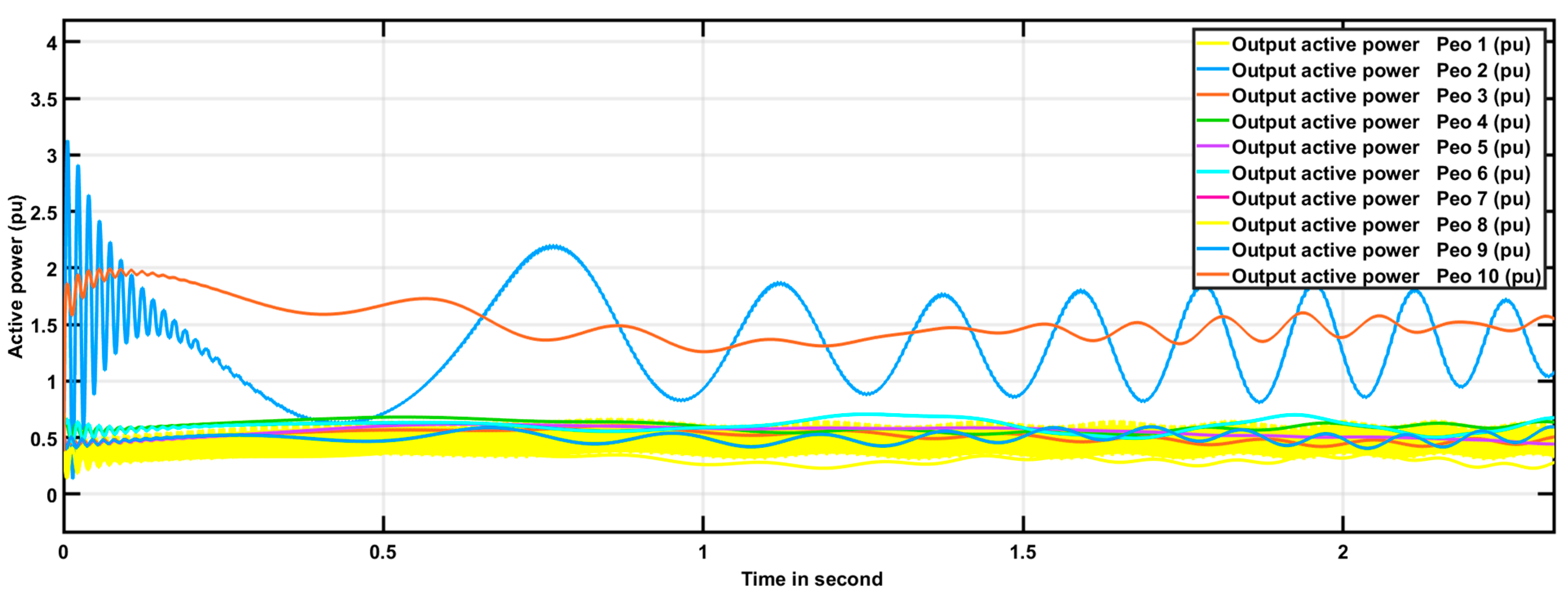
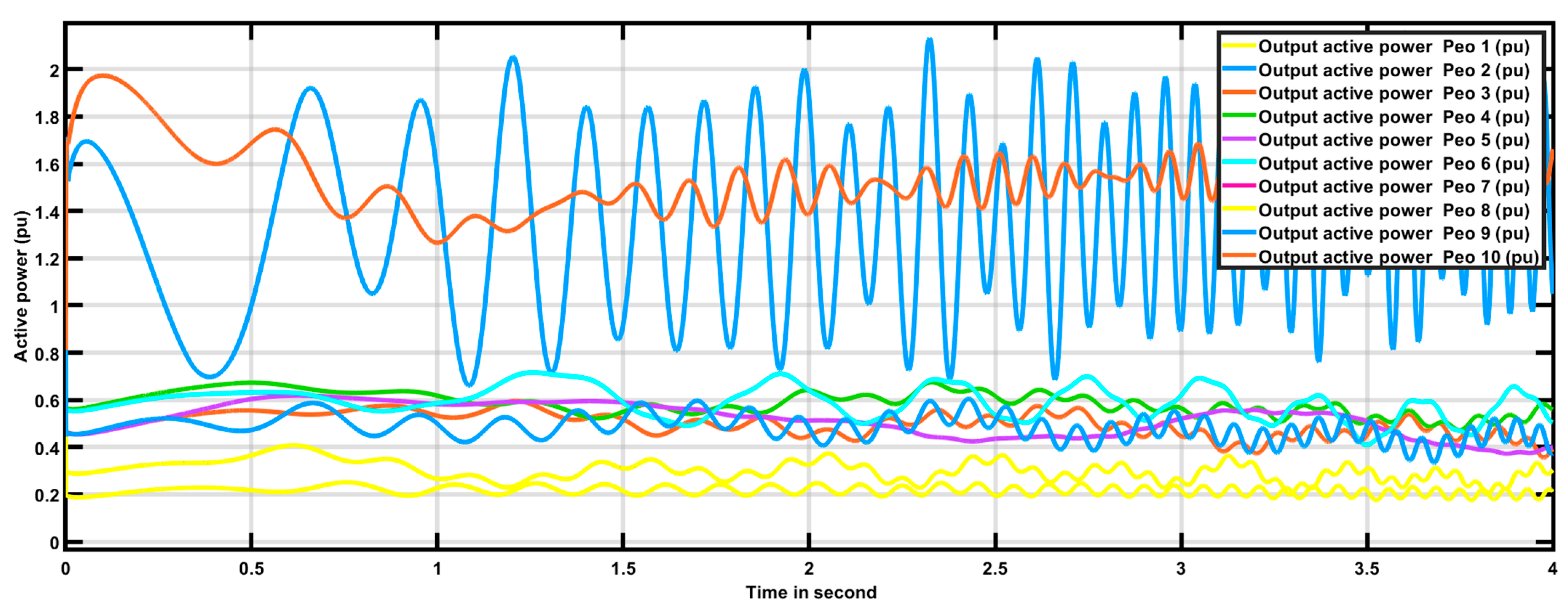
5.2. General Results Achieved
6. Smart Grids Face Challenges in Terms of Stability and Control
7. Concluding Remarks and Future Potentials
- Communication network is a network of choice based on latency.
- Network control system issues are limited to online delays.
- Delay is considered to be between the sensor and the controller, between the controller and the actuator, and the combination of both delays;
- Imitation is done by delaying suddenness and suddenness.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| SDC | Supplementary Damping Controller |
| DD-WADC | Delay-Dependent-Wide Area Damping Control |
| DOF-WADC | Dynamic Output Feedback–Wide Area Damping Control |
| BA | Bat Algorithm |
| BESS | Battery Energy Storage Systems |
| DOFC | Dynamic Output Feedback Controller |
| POD | Oscillation Damping |
| MPM | Modified Predictor Method |
| POD | Oscillation Damping |
References
- Ghosh, S.; Ali, M.H. Minimization of Adverse Effects of Time Delay on Power Quality Enhancement in Hybrid Grid. IEEE Syst. J. 2019, 13, 3091–3101. [Google Scholar] [CrossRef]
- Naduvathuparambil, B.; Valenti, M.C.; Feliachi, A. Communication delays in wide area measurement systems. In Proceedings of the Annual Southeastern Symposium on System Theory, Huntsville, AL, USA, 9 March 2002. [Google Scholar]
- Kumar, N.M.; Chand, A.A.; Malvoni, M.; Prasad, K.A.; Mamun, K.A.; Islam, F.; Chopra, S.S. Distributed energy resources and the application of AI, IOT, and blockchain in smart grids. Energies 2020, 13, 5739. [Google Scholar] [CrossRef]
- Villamil, S.; Hernández, C.; Tarazona, G. An overview of internet of things. Telkomnika Telecommun. Comput. Electron. Control 2020, 18, 2320–2327. [Google Scholar] [CrossRef]
- Mondal, D.; Chakrabarti, A.; Sengupta, A. Power System Small Signal Stability Analysis and Control; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Patrick, I.O.; Chidolue, G.C. Protection and Control of Power System-a Review. Int. J. Adv. Res. Technol. 2014, 3, 158–166. [Google Scholar]
- Markushevich, N. The benefits and challenges of the integrated volt/var optimization in the smart grid environment. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 118–122. [Google Scholar]
- Nguyen, T.; Wang, S.; Alhazmi, M.; Nazemi, M.; Estebsari, A.; Dehghanian, P. Electric Power Grid Resilience to Cyber Adversaries: State of the Art. IEEE Access 2020, 8, 87592–87608. [Google Scholar] [CrossRef]
- Sufyan, M.A.A.; Zuhaib, M.; Rihan, M. An investigation on the application and challenges for wide area monitoring and control in smart grid. Bull. Electr. Eng. Inform. 2021, 10, 580–587. [Google Scholar] [CrossRef]
- Babu, B.; Ijyas, T.; Muneer, P.; Varghese, J. Security issues in SCADA based industrial control systems. In Proceedings of the 2nd International Conference on Anti-Cyber Crimes, ICACC 2017, Abha, Saudi Arabia, 26–27 March 2017; pp. 47–51. [Google Scholar]
- Khanna, M. Communication Challenges for the FREEDM System. Ph.D. Thesis, NC State University, Raleigh, NC, USA, 2009. [Google Scholar]
- Wei, L.; Rondon, L.P.; Moghadasi, A.; Sarwat, A.I. Review of Cyber-Physical Attacks and Counter Defense Mechanisms for Advanced Metering Infrastructure in Smart Grid. In Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference, Denver, CO, USA, 16–19 April 2018. [Google Scholar]
- Zhang, F.; Kodituwakku, H.A.D.E.; Hines, J.W.; Coble, J.B. Multilayer Data-Driven Cyber-Attack Detection System for Industrial Control Systems Based on Network, System, and Process Data. IEEE Trans. Ind. Inform. 2019, 15, 4362–4369. [Google Scholar] [CrossRef]
- Lou, X.; Tran, C.; Tan, R.; Yau, D.K.Y.; Kalbarczyk, Z.T.; Banerjee, A.K.; Ganesh, P. Assessing and Mitigating Impact of Time Delay Attack: Case Studies for Power Grid Controls. IEEE J. Sel. Areas Commun. 2019, 38, 141–155. [Google Scholar] [CrossRef]
- Gao, B.; Shi, L. Modeling an Attack-Mitigation Dynamic Game-Theoretic Scheme for Security Vulnerability Analysis in a CyberPhysical Power System. IEEE Access 2020, 8, 30322–30331. [Google Scholar] [CrossRef]
- Yan, H.; Zhou, X.; Zhang, H.; Yang, F.; Wu, Z.-G. A Novel Sliding Mode Estimation for Microgrid Control with Communication Time Delays. IEEE Trans. Smart Grid 2019, 10, 1509–1520. [Google Scholar] [CrossRef]
- Ashfaque, A.H. Damping of Electromechanical Oscillations in Power Systems Using Wide Area Control Ashfaque Ahmed Hashmani. Ph.D. Thesis, University of Duisburg-Essen, Duisburg, Germany, 2020. [Google Scholar]
- Guo, Y.; Zhang, L.; Zhao, J.; Wen, F.; Salam, A.; Mao, J.; Li, L. Networked Control of Electric Vehicles for Power System Frequency Regulation with Random Communication Time Delay. Energies 2017, 10, 621. [Google Scholar] [CrossRef]
- Heydari, R.; Khayat, Y.; Amiri, A.; Dragicevic, T.; Shafiee, Q.; Popovski, P.; Blaabjerg, F. Robust High-Rate Secondary Control of Microgrids with Mitigation of Communication Impairments. IEEE Trans. Power Electron. 2020, 35, 12486–12496. [Google Scholar] [CrossRef]
- Dias, J.A.; Serni, P.J.A.; Bueno, A.; Godoy, E. The study of communication between distributed generation devices in a smart grid environment. In Networked Control Systems: Research Challenges and Advances for Application; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Lv, X.; Sun, Y.; Hu, W.; Dinavahi, V. Robust load frequency control for networked power system with renewable energy via fractional-order global sliding mode control. IET Renew. Power Gener. 2021, 15, 1046–1057. [Google Scholar] [CrossRef]
- Wang, C.-C.; Qian, W.; Li, B.-F.; Zhao, Y. Stability analysis of wide area power system under the influence of interval timevarying delay. Syst. Sci. Control Eng. 2018, 6, 1–9. [Google Scholar] [CrossRef]
- Amraee, T.; Darebaghi, M.G.; Soroudi, A.; Keane, A. Probabilistic Under Frequency Load Shedding Considering RoCoF Relays of Distributed Generators. IEEE Trans. Power Syst. 2018, 33, 3587–3598. [Google Scholar] [CrossRef]
- Lin, H.; Su, H.; Shu, Z.; Wu, Z.-G.; Xu, Y. Optimal Estimation in UDP-Like Networked Control Systems with Intermittent Inputs: Stability Analysis and Suboptimal Filter Design. IEEE Trans. Autom. Control 2015, 61, 1794–1809. [Google Scholar] [CrossRef]
- Alcaide-Moreno, B.A.; Fuerte-Esquivel, C.R.; Castro, L.M.; Zamora-Cárdenas, E.A. Generalized State Estimation of Flexible AC Power Systems Considering Wind Generators and Primary Frequency Control. Electr. Power Components Syst. 2015, 43, 1534–1547. [Google Scholar] [CrossRef]
- Mani, P.; Joo, Y.H. Fuzzy logic-based integral sliding mode control of multi-area power systems integrated with wind farms. Inf. Sci. 2021, 545, 153–169. [Google Scholar] [CrossRef]
- Zheng, A.; Huang, Q.; Cai, D.; Li, J.; Jing, S.; Hu, W.; Wu, J. Quantitative Assessment of Stochastic Property of Network-Induced Time Delay in Smart Substation Cyber Communications. IEEE Trans. Smart Grid 2020, 11, 2407–2416. [Google Scholar] [CrossRef]
- IEEE. IEEE Guide for Synchronous Generator Modeling Practices and Parameter Verification with Applications in Power System Stability Analyses; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Suyono, H.; Hasanah, R.N. Analysis of power losses due to distributed generation increase on distribution system. J. Teknol. 2016, 78. [Google Scholar] [CrossRef]
- Gupta, B.B.; Akhtar, T. A survey on smart power grid: Frameworks, tools, security issues, and solutions. Ann. Telecommun. 2017, 72, 517–549. [Google Scholar] [CrossRef]
- Sharma, C.; Tyagi, B. Fuzzy Type-2 Controller Design for Small-Signal Stability Considering Time Latencies and Uncertainties in PMU Measurements. IEEE Syst. J. 2017, 11, 1149–1160. [Google Scholar] [CrossRef]
- Gao, W.; Ye, H.; Liu, Y.; Wang, L.; Ci, W. Comparison of three stability analysis methods for delayed cyber-physical power system. In Proceedings of the China International Conference on Electricity Distribution, CICED, Xi’an, China, 10–13 August 2016. [Google Scholar]
- Isa, A.I.M.; Mohamad, H.; Naidu, K.; Dahlan, N.Y.; Musirin, I. Method of determining load priority using fuzzy logic for adaptive under frequency load shedding technique. Pertanika J. Sci. Technol. 2017, 25, 239–247. [Google Scholar]
- Zhang, D.; Han, Q.-L.; Jia, X. Network-Based Output Tracking Control for a Class of T-S Fuzzy Systems That Can Not Be Stabilized by Nondelayed Output Feedback Controllers. IEEE Trans. Cybern. 2014, 45, 1511–1524. [Google Scholar] [CrossRef] [PubMed]
- Truong, D.Q.; Ahn, K.K. Robust Variable Sampling Period Control for Networked Control Systems. IEEE Trans. Ind. Electron. 2015, 62, 5630–5643. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L. A Decentralized Event-Triggered Dissipative Control Scheme for Systems with Multiple Sensors to Sample the System Outputs. IEEE Trans. Cybern. 2015, 46, 2745–2757. [Google Scholar] [CrossRef]
- Tavassoli, B.; Amraee, T.; Amanzadeh, M. Design and evaluation of distributed networked control for a dual-machine power system. In Proceedings of the 25th Iranian Conference on Electrical Engineering, ICEE, Tehran, Iran, 2–4 May 2017. [Google Scholar]
- Ge, X.; Yang, F.; Han, Q.-L. Distributed networked control systems: A brief overview. Inf. Sci. 2017, 380, 117–131. [Google Scholar] [CrossRef]
- Gautam, M.; Pati, A.; Mishra, S.; Appasani, B.; Kabalci, E.; Bizon, N.; Thounthong, P. A Comprehensive Review of the Evolution of Networked Control System Technology and Its Future Potentials. Sustainability 2021, 13, 2962. [Google Scholar] [CrossRef]
- Liu, K.; Fridman, E.; Johansson, K.H. Dynamic quantization of uncertain linear networked control systems. Automatica 2015, 59, 248–255. [Google Scholar] [CrossRef]
- Zhang, X.-M.; Han, Q.-L.; Yu, X. Survey on Recent Advances in Networked Control Systems. IEEE Trans. Ind. Inform. 2016, 12, 1740–1752. [Google Scholar] [CrossRef]
- Chen, H.; Gao, J.; Shi, T.; Lu, R. H ∞ control for networked control systems with time delay, data packet dropout and disorder. Neurocomputing 2016, 179, 211–218. [Google Scholar] [CrossRef]
- Freirich, D.; Fridman, E. Decentralized networked control of systems with local networks: A time-delay approach. Automatica 2016, 69, 201–209. [Google Scholar] [CrossRef]
- Lu, R.; Xu, Y.; Zhang, R. A New Design of Model Predictive Tracking Control for Networked Control System Under Random Packet Loss and Uncertainties. IEEE Trans. Ind. Electron. 2016, 63, 6999–7007. [Google Scholar] [CrossRef]
- Todescato, M.; Carli, R.; Schenato, L.; Barchi, G. Smart Grid State Estimation with PMUs Time Synchronization Errors. Energies 2020, 13, 5148. [Google Scholar] [CrossRef]
- Liu, X.; Yu, X.; Ma, G.; Xi, H. On sliding mode control for networked control systems with semi-Markovian switching and random sensor delays. Inf. Sci. 2016, 337–338, 44–58. [Google Scholar] [CrossRef]
- Peng, C.; Han, Q.-L. On Designing a Novel Self-Triggered Sampling Scheme for Networked Control Systems with Data Losses and Communication Delays. IEEE Trans. Ind. Electron. 2015, 63, 1239–1248. [Google Scholar] [CrossRef]
- Li, M.; Chen, Y. Robust Adaptive Sliding Mode Control for Switched Networked Control Systems with Disturbance and Faults. IEEE Trans. Ind. Inform. 2018, 15, 193–204. [Google Scholar] [CrossRef]
- Wei, Y.; Qiu, J.; Shi, P.; Wu, L. A Piecewise-Markovian Lyapunov Approach to Reliable Output Feedback Control for Fuzzy-Affine Systems with Time-Delays and Actuator Faults. IEEE Trans. Cybern. 2017, 48, 2723–2735. [Google Scholar] [CrossRef]
- Sun, Y.C.; Yang, G.H. Event-triggered state estimation for networked control systems with lossy network communication. Inf. Sci. 2019, 492, 1–12. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.-L.; Wang, Z.; Ge, X. A Survey on Model-Based Distributed Control and Filtering for Industrial Cyber-Physical Systems. IEEE Trans. Ind. Inform. 2019, 15, 2483–2499. [Google Scholar] [CrossRef]
- Bento, M.E.C. An optimization approach for the wide-area damping control design. In Proceedings of the 13th IEEE International Conference on Industry Applications, INDUSCON, Sao Paulo, Brazil, 12–14 November 2018; pp. 269–276. [Google Scholar]
- Yi, X.; Yang, T.; Wu, J.; Johansson, K.H. Distributed event-triggered control for global consensus of multi-agent systems with input saturation. Automatica 2019, 100, 1–9. [Google Scholar] [CrossRef]
- Liu, S.; Wang, X.; Liu, P.X. Impact of Communication Delays on Secondary Frequency Control in an Islanded Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- Ahumada, C.; Cardenas, R.; Saez, D.; Guerrero, J. Secondary Control Strategies for Frequency Restoration in Islanded Microgrids with Consideration of Communication Delays. IEEE Trans. Smart Grid 2016, 7, 1430–1441. [Google Scholar] [CrossRef]
- Liu, K.-Z.; Sun, X.-M.; Teel, A.R.; Liu, J. Stability analysis for networked control systems with sampling, transmission protocols and input delays. Nonlinear Anal. Hybrid Syst. 2021, 39, 100974. [Google Scholar] [CrossRef]
- Liu, Y.-A.; Tang, S.; Liu, Y.; Kong, Q.; Wang, J. Extended dissipative sliding mode control for nonlinear networked control systems via event-triggered mechanism with random uncertain measurement. Appl. Math. Comput. 2021, 396, 125901. [Google Scholar] [CrossRef]
- Fang, F.; Ding, H.; Liu, Y.; Park, J.H. Fault tolerant sampled-data H∞ control for networked control systems with probabilistic time-varying delay. Inf. Sci. 2021, 544, 395–414. [Google Scholar] [CrossRef]
- Shi, X.; Cao, Y.; Shahidehpour, M.; Li, Y.; Wu, X.; Li, Z. Data-Driven Wide-Area Model-Free Adaptive Damping Control with Communication Delays for Wind Farm. IEEE Trans. Smart Grid 2020, 11, 5062–5071. [Google Scholar] [CrossRef]
- Guo, Z.; Gong, S.; Wen, S.; Huang, T. Event-Based Synchronization Control for Memristive Neural Networks with Time-Varying Delay. IEEE Trans. Cybern. 2019, 49, 3268–3277. [Google Scholar] [CrossRef]
- Beiraghi, M.; Ranjbar, A.M. Adaptive Delay Compensator for the Robust Wide-Area Damping Controller Design. IEEE Trans. Power Syst. 2016, 31, 4966–4976. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Ríos, M.A.; Besanger, Y.; Hadjsaid, N.; Montoya, O.D. Latencies in power systems: A database-based timedelay compensation for memory controllers. Electronics 2021, 10, 208. [Google Scholar] [CrossRef]
- Quanyuan, J.; Zhenyu, Z.; Yijia, C. Wide-area TCSC controller design in consideration of feedback signals’ time delays. In Proceedings of the IEEE Power Engineering Society General Meeting, San Francisco, CA, USA, 16 June 2005; Volume 2. [Google Scholar]
- Zhao, Y.B.; Sun, X.M.; Zhang, J.; Shi, P. Networked Control Systems: The Communication Basics and Control Methodologies. Math. Probl. Eng. 2015, 2015, 639793. [Google Scholar] [CrossRef]
- Haghighi, P.; Tavassoli, B. Robust H∞ output feedback design for networked control systems with partially known delay probabilities. Optim. Control Appl. Methods 2020, 41, 1052–1067. [Google Scholar] [CrossRef]
- Abbasspour, A.; Sargolzaei, A.; Victorio, M.; Khoshavi, N. A Neural Network-based Approach for Detection of Time Delay Switch Attack on Networked Control Systems. Procedia Comput. Sci. 2020, 168, 279–288. [Google Scholar] [CrossRef]
- Luo, H.; Hu, Z. Stability Analysis of Sampled-Data Load Frequency Control Systems with Multiple Delays. IEEE Trans. Control Syst. Technol. 2021, 30, 434–442. [Google Scholar] [CrossRef]
- Islam, S.; El Saddik, A.; Sunda-Meya, A. Robust load frequency control for smart power grid over open distributed communication network with uncertainty. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, Bari, Italy, 6–9 October 2019; pp. 4341–4346. [Google Scholar]
- Bento, M.E.C.; Kuiava, R.; Ramos, R.A. Design of Wide-Area Damping Controllers Incorporating Resiliency to Permanent Failure of Remote Communication Links. J. Control Autom. Electr. Syst. 2018, 29, 541–550. [Google Scholar] [CrossRef]
- Liu, S.; Liu, P.X.; Wang, X. Stability analysis and compensation of network-induced delays in communication-based power system control: A survey. ISA Trans. 2017, 66, 143–153. [Google Scholar] [CrossRef]
- Wang, S.; Ou, X.; Li, D.; Wang, H.; Zhu, G. K-Filter Observer Based Adaptive Quantized Decentralized Excitation Control for Multi-Machine Power Systems with the Line Transmission Delays. IEEE Access 2021, 9, 51355–51367. [Google Scholar] [CrossRef]
- Chae, S.; Huang, D.; Nguang, S.K. Robust partially mode delay-dependent H∞ output feedback control of discrete-time networked control systems. Asian J. Control 2014, 16, 1764–1773. [Google Scholar] [CrossRef]
- Yin, X.; Wang, W.; Lam, H.K. Fuzzy logic wide-area damping control with delay compensation for power system. Xi Tong Gong Cheng Yu Dian Zi Ji Shu/Syst. Eng. Electron. 2019, 41, 2343–2351. [Google Scholar]
- Soleymani, M.; Abolmasoumi, A.H.; Bahrami, H.; Khalatbari, S.A.; Khoshbin, E.; Sayahi, S. Modified sliding mode control of a seismic active mass damper system considering model uncertainties and input time delay. J. Vib. Control 2018, 24, 1051–1064. [Google Scholar] [CrossRef]
- Zhu, Q.; Jiang, L.; Yao, W.; Zhang, C.-K.; Luo, C. Robust Load Frequency Control with Dynamic Demand Response for Deregulated Power Systems Considering Communication Delays. Electr. Power Compon. Syst. 2016, 45, 75–87. [Google Scholar] [CrossRef]
- Dotoli, M.; Fay, A.; Miśkowicz, M.; Seatzu, C. An overview of current technologies and emerging trends in factory automation. Int. J. Prod. Res. 2019, 57, 5047–5067. [Google Scholar] [CrossRef]
- Mo, H.; Sansavini, G. Hidden Markov model-based smith predictor for the mitigation of the impact of communication delays in wide-area power systems. Appl. Math. Model. 2021, 89, 19–48. [Google Scholar] [CrossRef]
- Bhadu, M.; Senroy, N.; Kar, I.N.; Sudha, G.N. Robust linear quadratic Gaussian-based discrete mode wide area power system damping controller. IET Gener. Transm. Distrib. 2016, 10, 1470–1478. [Google Scholar] [CrossRef]
- Bhattarai, B.; Marinovici, L.; Touhiduzzaman; Tuffner, F.K.; Schneider, K.P.; Xie, J.; Mana, P.T.; Du, W.; Fisher, A. Studying impacts of communication system performance on dynamic stability of networked microgrid. IET Smart Grid 2020, 3, 667–676. [Google Scholar] [CrossRef]
- León, H.; Montez, C.; Valle, O.; Vasques, F. Real-Time Analysis of Time-Critical Messages in IEC 61850 Electrical Substation Communication Systems. Energies 2019, 12, 2272. [Google Scholar] [CrossRef]
- Jin, L.; Zhang, C.-K.; He, Y.; Jiang, L.; Wu, M. Delay-Dependent Stability Analysis of Multi-Area Load Frequency Control with Enhanced Accuracy and Computation Efficiency. IEEE Trans. Power Syst. 2019, 34, 3687–3696. [Google Scholar] [CrossRef]
- Zhang, L.; Shi, Y.; Chen, T.; Huang, B. A new method for stabilization of networked control systems with random delays. IEEE Trans. Automat. Control 2005, 50, 1177–1181. [Google Scholar] [CrossRef]
- Darabian, M.; Ashouri, A.; Bagheri, A. Hierarchical damping controller design in large-scale power systems including hybrid renewable energy sources for compensation of time delays. Int. Trans. Electr. Energy Syst. 2020, 30, e12362. [Google Scholar] [CrossRef]
- Ali, M.H.; Dasgupta, D. Effects of communication delays in electric grid. In Proceedings of the Future of Instrumentation International Workshop, FIIW, Oak Ridge, TN, USA, 7–8 November 2011; pp. 38–41. [Google Scholar]
- Klaimi, J.; Rahim-Amoud, R.; Merghem-Boulahia, L.; Jrad, A. A novel loss-based energy management approach for smart grids using multi-agent systems and intelligent storage systems. Sustain. Cities Soc. 2018, 39, 344–357. [Google Scholar] [CrossRef]
- Wang, B.; Tang, Z.; Liu, W.; Zhang, Q. A Distributed Cooperative Control Strategy of Offshore Wind Turbine Groups with Input Time Delay. Sustainability 2020, 12, 3032. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, S. An improved dynamic quantization scheme for uncertain linear networked control systems. Automatica 2018, 92, 244–248. [Google Scholar] [CrossRef]
- Nan, J.; Yao, W.; Wen, J.; Peng, Y.; Fang, J.; Ai, X.; Wen, J. Wide-area power oscillation damper for DFIG-based wind farm with communication delay and packet dropout compensation. Int. J. Electr. Power Energy Syst. 2021, 124, 106306. [Google Scholar] [CrossRef]
- Zhong, Z.; Zhu, Y.; Lin, C.-M.; Huang, T. A fuzzy control framework for interconnected nonlinear power networks under TDS attack: Estimation and compensation. J. Frankl. Inst. 2021, 358, 74–88. [Google Scholar]
- Yilmaz, M.; Adediran, S.A.; McLauchlan, L. Hydro plant network control LPV framework. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, San Diego, CA, USA, 5–8 October 2014. [Google Scholar]
- Cheng, L. Research on remote monitoring of smart power grid using wireless sensor network. Int. J. Mechatron. Appl. Mech. 2020, 1, 243–249. [Google Scholar]
- Singh, V.P.; Kishor, N.; Samuel, P. Communication time delay estimation for load frequency control in two-area power system. Ad Hoc Netw. 2016, 41, 69–85. [Google Scholar]
- Sönmez, Ş.; Ayasun, S.; Eminoglu, U. Computation of Time Delay Margins for Stability of a Single-Area Load Frequency Control System with Communication Delays. WSEAS Trans. Power Syst. 2014, 9, 67–76. [Google Scholar]
- Wang, S.; Wang, Z. Sliding Mode Dynamic Surface Control for Multi-Machine Power Systems with Time Delays and DeadZones. Cybern. Syst. 2021, 52, 58–72. [Google Scholar]
- Katipoglu, D.; Sonmez, S.; Ayasun, S. Stability Delay Margin Computation of Load Frequency Control System with Demand Response. In Proceedings of the IEEE 1st Global Power, Energy and Communication Conference, GPECOM, Nevsehir, Turkey, 12–15 June 2019; pp. 473–478. [Google Scholar]
- Liu, F.; Yan, W.; Wu, M. Wide-area signals time-delay STATCOM additional damping control for power system. In Power and Energy, Proceedings of the International Conference on Power and Energy, CPE, Shanghai, China, 29–30 November 2014; CRC Press: Boca Raton, FL, USA, 2015; pp. 371–374. [Google Scholar]
- Chen, B.Y.; Shangguan, X.C.; Jin, L.; Li, D.Y. An improved stability criterion for load frequency control of power systems with time-varying delays. Energies 2020, 13, 2101. [Google Scholar] [CrossRef]
- Yang, B.; Sun, Y. A Novel Approach to Calculate Damping Factor Based Delay Margin for Wide Area Damping Control. IEEE Trans. Power Syst. 2014, 29, 3116–3117. [Google Scholar]
- Aslam, M.S.; Dai, X. H ∞ Control for Network T-S Fuzzy Systems under Time Varying Delay for Multi-area Power Systems. Int. J. Control Autom. Syst. 2020, 18, 2774–2787. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, Y.; Guo, L. Stochastic stabilizing control of networked control system with Markovian parameters. In Lecture Notes in Electrical Engineering; Springer: Cham, Switzerland, 2014; Volume 237. [Google Scholar]
- Zheng, S.; Shi, P.; Wang, S.; Shi, Y. Adaptive Robust Control for Stochastic Systems with Unknown Interconnections. IEEE Trans. Fuzzy Syst. 2021, 29, 1008–1022. [Google Scholar] [CrossRef]
- Zhong, Z.; Lin, C.-M.; Shao, Z.; Xu, M. Decentralized Event-Triggered Control for Large-Scale Networked Fuzzy Systems. IEEE Trans. Fuzzy Syst. 2018, 26, 29–45. [Google Scholar] [CrossRef]
- Zhang, R.; Zeng, D.; Park, J.H.; Lam, H.K.; Xie, X. Fuzzy Sampled-Data Control for Synchronization of T-S Fuzzy ReactionDiffusion Neural Networks with Additive Time-Varying Delays. IEEE Trans. Cybern. 2021, 51, 2384–2397. [Google Scholar] [CrossRef]
- Dinh, T.Q.; Ahn, K.K.; Marco, J. A Novel Robust Predictive Control System Over Imperfect Networks. IEEE Trans. Ind. Electron. 2016, 64, 1751–1761. [Google Scholar] [CrossRef]
- Liu, M.; Dassios, I.; Tzounas, G.; Milano, F. Stability Analysis of Power Systems with Inclusion of Realistic-Modeling WAMS Delays. IEEE Trans. Power Syst. 2018, 34, 627–636. [Google Scholar] [CrossRef]
- Zhang, S.; Vittal, V. Design of Wide-Area Power System Damping Controllers Resilient to Communication Failures. IEEE Trans. Power Syst. 2013, 28, 4292–4300. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Liu, F.; Cao, Y.; Rehtanz, C. Design and Implementation of Delay-Dependent Wide-Area Damping Control for Stability Enhancement of Power Systems. IEEE Trans. Smart Grid 2016, 8, 1831–1842. [Google Scholar] [CrossRef]
- Setiadi, H.; Mithulananthan, N.; Shah, R.; Lee, K.Y.; Krismanto, A.U. Resilient wide-area multi-mode controller design based on Bat algorithm for power systems with renewable power generation and battery energy storage systems. IET Gener. Transm. Distrib. 2019, 13, 1884–1894. [Google Scholar] [CrossRef]
- Sun, M.; Guo, Y.; Song, S. The Delay-Dependent DOFC for Damping Inter-Area Low-Frequency Oscillations in an Interconnected Power System Considering Packet Loss of Wide-Area Signals. Energies 2021, 14, 5892. [Google Scholar] [CrossRef]
- Driankov, D. An Introduction to Fuzzy Control, 2nd ed.; Springer: Berlin, Germany, 1993. [Google Scholar]
- Ali, M.H.; Wu, B.; Tamura, J.; Dougal, R.A. Minimization of shaft oscillations by fuzzy controlled SMES considering time delay. Electr. Power Syst. Res. 2009, 80, 770–777. [Google Scholar] [CrossRef]
- Mentesidi, K.; Garde, R.; Aguado, M.; Rikos, E. Implementation of a fuzzy logic controller for virtual inertia emulation. In Proceedings of the International Symposium on Smart Electric Distribution Systems and Technologies, EDST, Vienna, Austria, 8–11 September 2015. [Google Scholar]
- IEC. 61850; Communication Networks and Systems in Substations. IEC: Geneva, Switzerland, 2003; Volume 3.
- Ali, H.; Dasgupta, D. Effects of time delays in the electric power grid. In IFIP Advances in Information and Communication Technology; Springer: Cham, Switzerland, 2012; Volume 390, pp. 139–154. [Google Scholar]
- Ali, M.; Murata, T.; Tamura, J. Effect of Coordination of Optimal Reclosing and Fuzzy Controlled Braking Resistor on Transient Stability During Unsuccessful Reclosing. IEEE Trans. Power Syst. 2006, 21, 1321–1330. [Google Scholar] [CrossRef]
- Azeroual, M.; Lamhamdi, T.; El Moussaoui, H.; El Markhi, H. Simulation tools for a smart grid and energy management for microgrid with wind power using multi-agent system. Wind Eng. 2020, 44, 661–672. [Google Scholar] [CrossRef]









| Transmission System | Distribution System | Device | System | Cyber Attack | Delay | |
|---|---|---|---|---|---|---|
| Data concentrator (DC) | √ | √ | √ | FDIA | √ | |
| SCADA | √ | √ | √ | FDIA/DOS | ||
| Control system | √ | √ | √ | FDIA/DOS | ||
| State estimator | √ | √ | FDIA | |||
| Communication channel | √ | √ | √ | DOS | √ | |
| Power market | √ | √ | FDIA/DOS | √ | ||
| Remote Terminal Unit (RTU) | √ | √ | FDIA/DOS | √ | ||
| Phasor Measurement Unit (PMU) | √ | √ | FDIA | √ | ||
| Programmable Logic Controller (PLC) | √ | √ | FDIA | √ | ||
| Advanced Meter Infrastructure (AMI) | √ | FDIA | ||||
| Intelligent Electronic Device (IED) | √ | FDIA |
| Methods | Calculation Load | Cooperativeness | Delay Type | Application |
|---|---|---|---|---|
| Direct | High | Low | Constant | [80] (2019), LFC., [96] (2015) WADC |
| Indirect | Medium | Medium | Constant and time varying | [99] (2020), [100] (2019) LFC, [75] (2017) LFC with DDC, [98] (2014) WADC |
| Detail Modelling Techniques | Model Dependence | Robustness | Design Difficulty | Delay Type | Applications | Main Contribution |
|---|---|---|---|---|---|---|
| (2016) (MPC) and Smith predictor-based controller | Low | Medium | Low | Deterministic and random | [55] Microgrid | Stability analysis based on small-signal |
| synthesis controller | High | Low | High | Deterministic and random | [61] WAMS | Considers model of time delays |
| (2018) LKF | High | High | High | Deterministic and random | [22] WAPS | Stability analysis |
| (2018) LMIs | Medium | Medium | Medium | Deterministic and random | [69] WADC | Optimization-based information sharing |
| (2019) Sliding mode control (SMC) | High | Medium | High | Deterministic and random | [16] Microgrid | Stability enhancement |
| (2020) Fuzzy logic | Low | Low | High | Deterministic and random | [94] WAMS | Calculate delay margins |
| (2020) T-S Fuzzy control (TSFC) | High | Medium | High | Deterministic and random | [68] LFC | High Stability system |
| (2016) Model-free adaptive control (MFAC) | High | Medium | High | Deterministic and random | [43] WADC | Calculate delay margins delays Scenarios. |
| (2021) Enhanced Time Delay Compensator (ETDC) | High | High | High | Deterministic and random | [62] WAMS, WAC, WAMC | Calculate reduction of overshoot (almost 39%) |
| (2021) Analytical approach and Optimal control gain | Medium | Low | High | Deterministic and random | [105] WAMSs | Design robustness of a small-signal stability |
| (2021) Neural network control and new Fractional-Order Global Sliding Mode Control | Medium | High | High | Deterministic and random | [71] LFC, [21] multi-area power system LFC | Compensate approximation error and The stability and stabilization |
| Techniques | Application Size | Threshold Parameters Applied | Compared with | Results |
|---|---|---|---|---|
| [106] SDC (2013) | IEEE 50-generator test system | Without SDC | More time efficient and faster than without SDC | |
| [107] DD-WADC and DOF-WADC (2016) | IEEE benchmark system (WADC) | PC-WADC | More time efficient and faster than PC-WADC. Even under the effect of the time-varying delay of the wide-area communication network, it knows how to still maintain a good damping performance. | |
| [108] BA and BESS (2019) | Java 500 kV Indonesian grid (WAMC) | POD and BESS | Higher accuracy and faster than BESS, highly competitive with POD and BESS | |
| [1] FLC (2019) | IEEE nine bus power system (WAMS) | MPM | More consistent and highly effective at classification and has minimize the impact of delay in positioning on the power structure of the Hybrid system. | |
| [109] DOFC (2021) | Four Machine Two-Area Power System (WADC) | PID | Better performance than PID, Execution time is less. | |
| [62] ETDC + MPC (2021) | Kundur’s 2-area test system (WAMS) | SPB + MPC | More accurate, scalable and efficient reduction of overshoot (about 39%) implies less stress over the thermal limits and less impact of isolation due to protective actions. |
| N | Big |
| Z | Medium |
| P | Small |
| Fault Point | Communication Delay | Head Value of WC (s) | |
|---|---|---|---|
| Without BR | With Fuzzy Controlled BR | ||
| A | 50 ms | 235.756 | 33.586 |
| 100 ms | 35.276 | ||
| 200 ms | 39.359 | ||
| 300 ms | 43.196 | ||
| B | 50 ms | 71.895 | 30.314 |
| 100 ms | 32.896 | ||
| 200 ms | 36.945 | ||
| 300 ms | 37.998 | ||
| C | 50 ms | 154.352 | 40.412 |
| 100 ms | 41.834 | ||
| 200 ms | 43.846 | ||
| 300 ms | 44.605 | ||
| D | 50 ms | 69.874 | 34.769 |
| 100 ms | 35.934 | ||
| 200 ms | 39.436 | ||
| 300 ms | 39.768 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muyizere, D.; Letting, L.K.; Munyazikwiye, B.B. Effects of Communication Signal Delay on the Power Grid: A Review. Electronics 2022, 11, 874. https://doi.org/10.3390/electronics11060874
Muyizere D, Letting LK, Munyazikwiye BB. Effects of Communication Signal Delay on the Power Grid: A Review. Electronics. 2022; 11(6):874. https://doi.org/10.3390/electronics11060874
Chicago/Turabian StyleMuyizere, Darius, Lawrence K. Letting, and Bernard B. Munyazikwiye. 2022. "Effects of Communication Signal Delay on the Power Grid: A Review" Electronics 11, no. 6: 874. https://doi.org/10.3390/electronics11060874
APA StyleMuyizere, D., Letting, L. K., & Munyazikwiye, B. B. (2022). Effects of Communication Signal Delay on the Power Grid: A Review. Electronics, 11(6), 874. https://doi.org/10.3390/electronics11060874