
3D Void Handling Geographic P2P-RPL for Indoor Multi-Hop IR-UWB Networks



Abstract
:1. Introduction
2. Related Works
3. Greedy Forwarding and Void Handling P2P-RPL with Adaptive Trickle Timer for Indoor 3D IR-UWB Networks
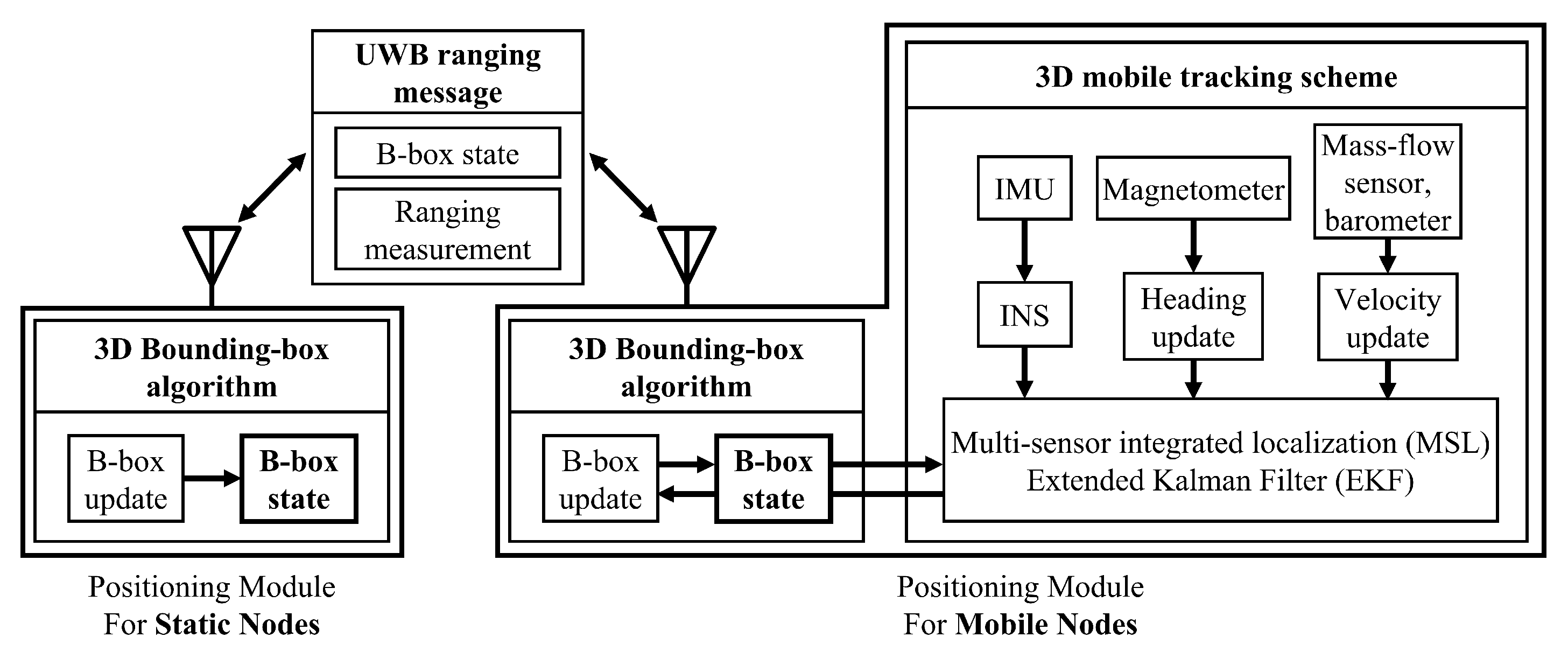
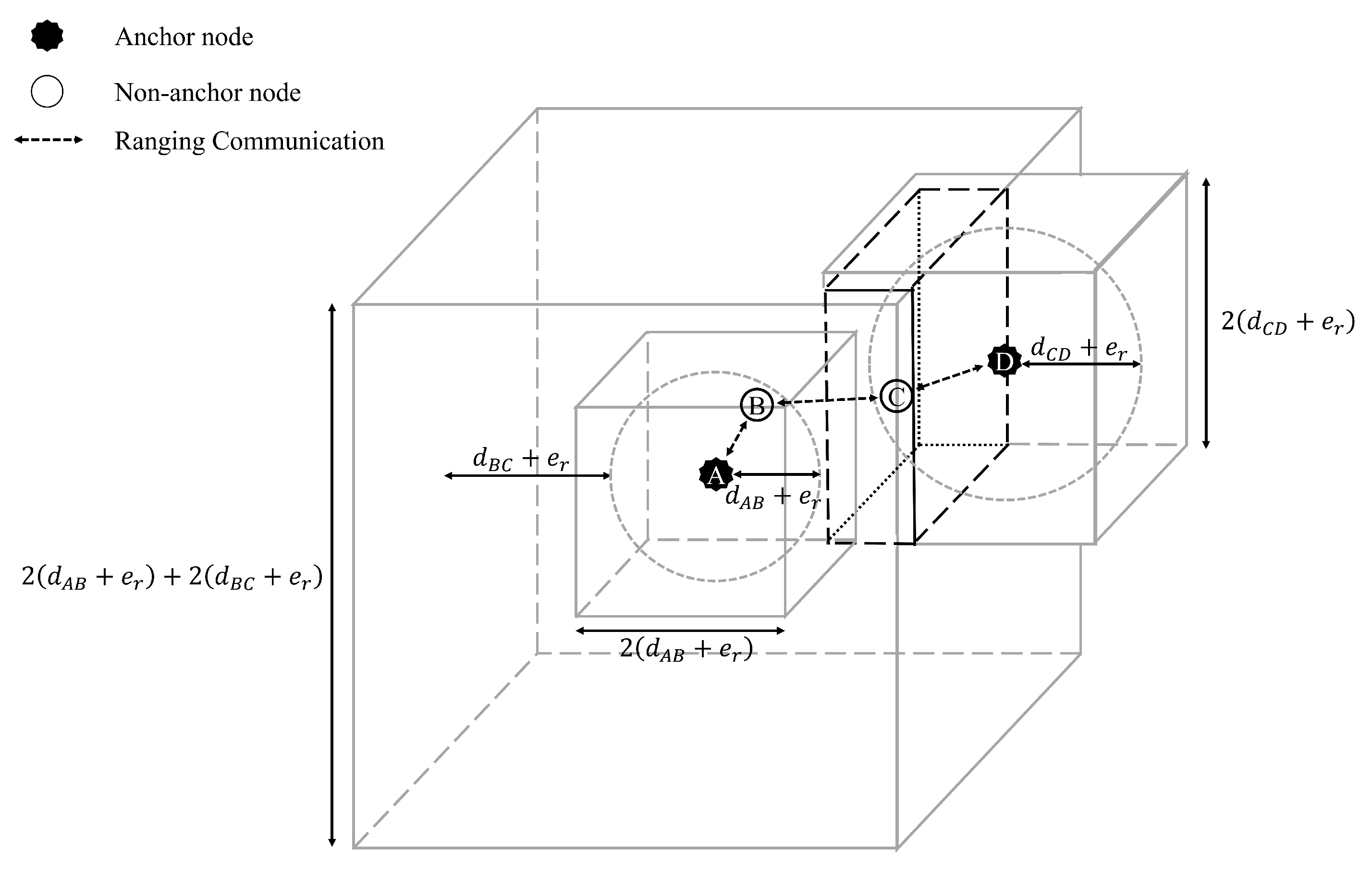
3.1. IR-UWB Based 3D Multi-Hop Self Localization with Bounding-Box and Mobile Tracking Scheme
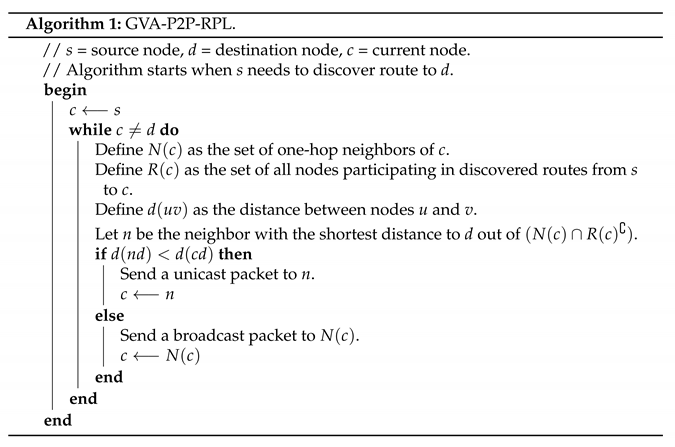
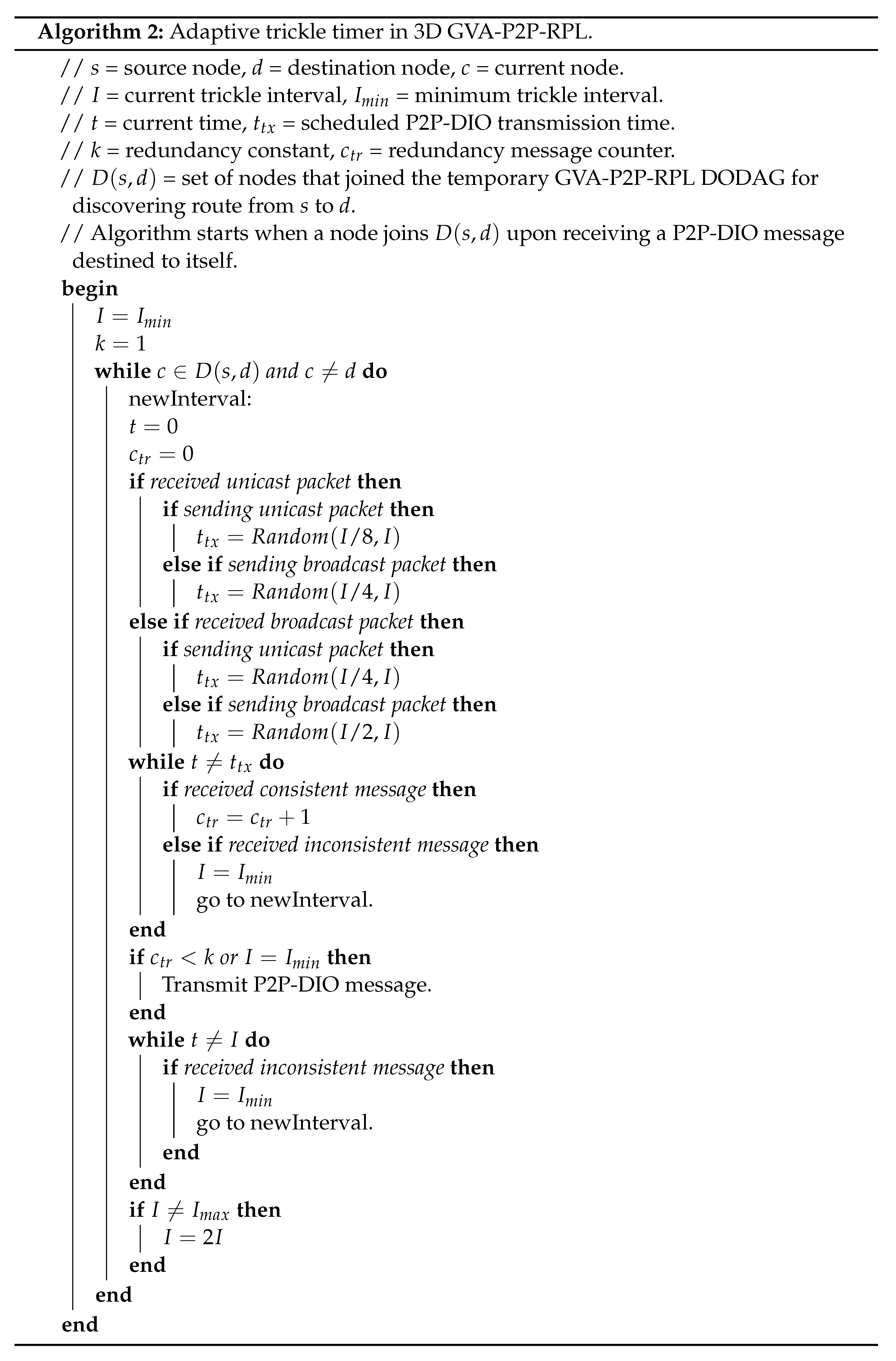
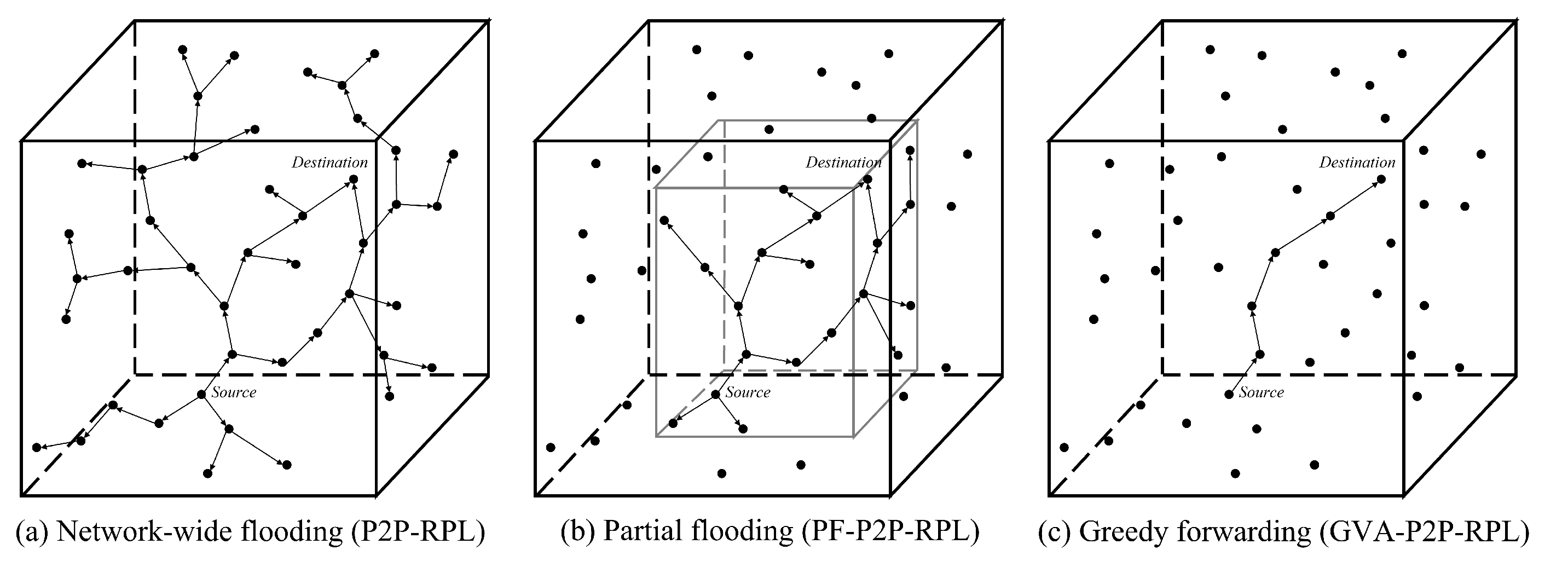
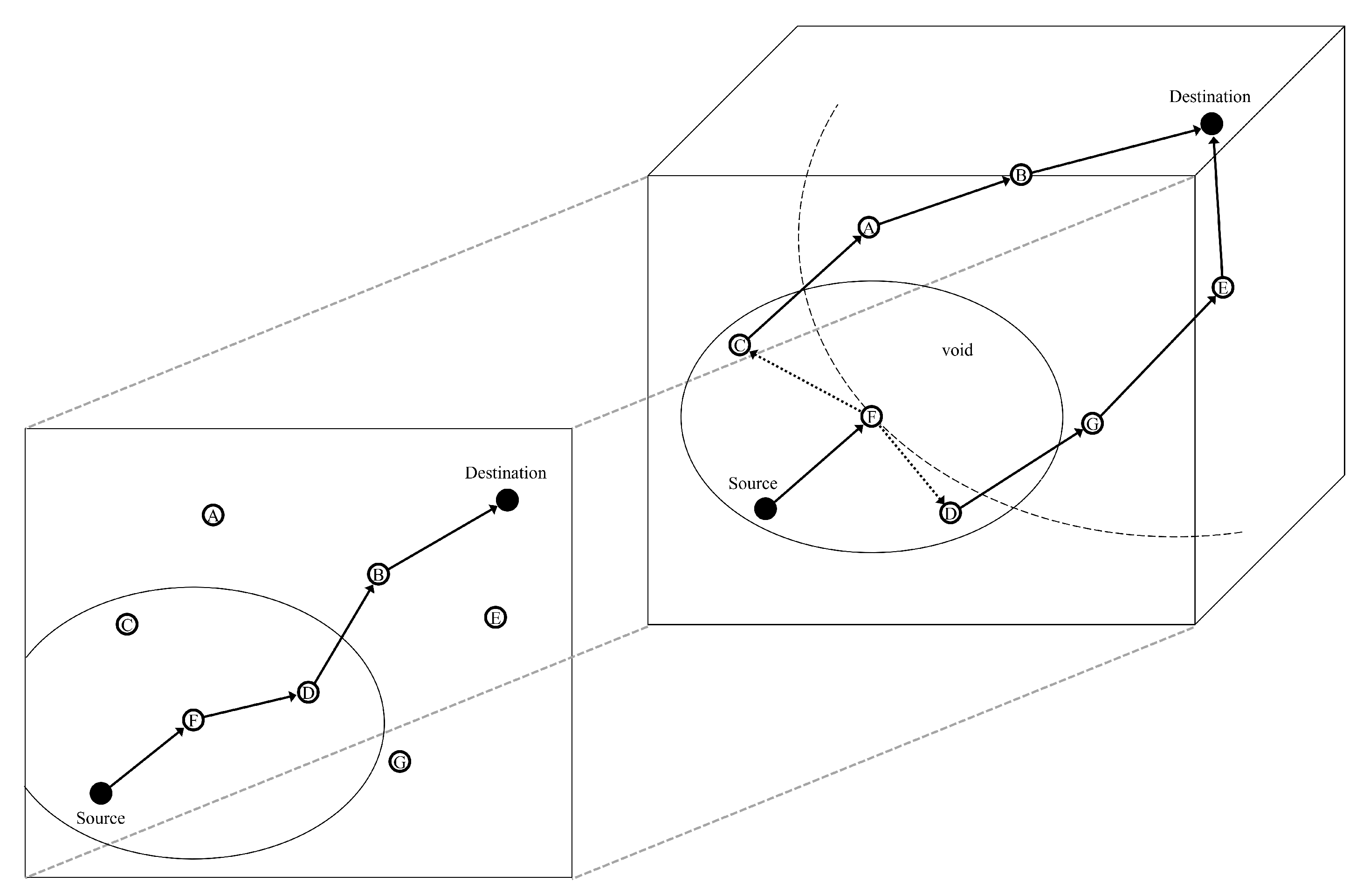
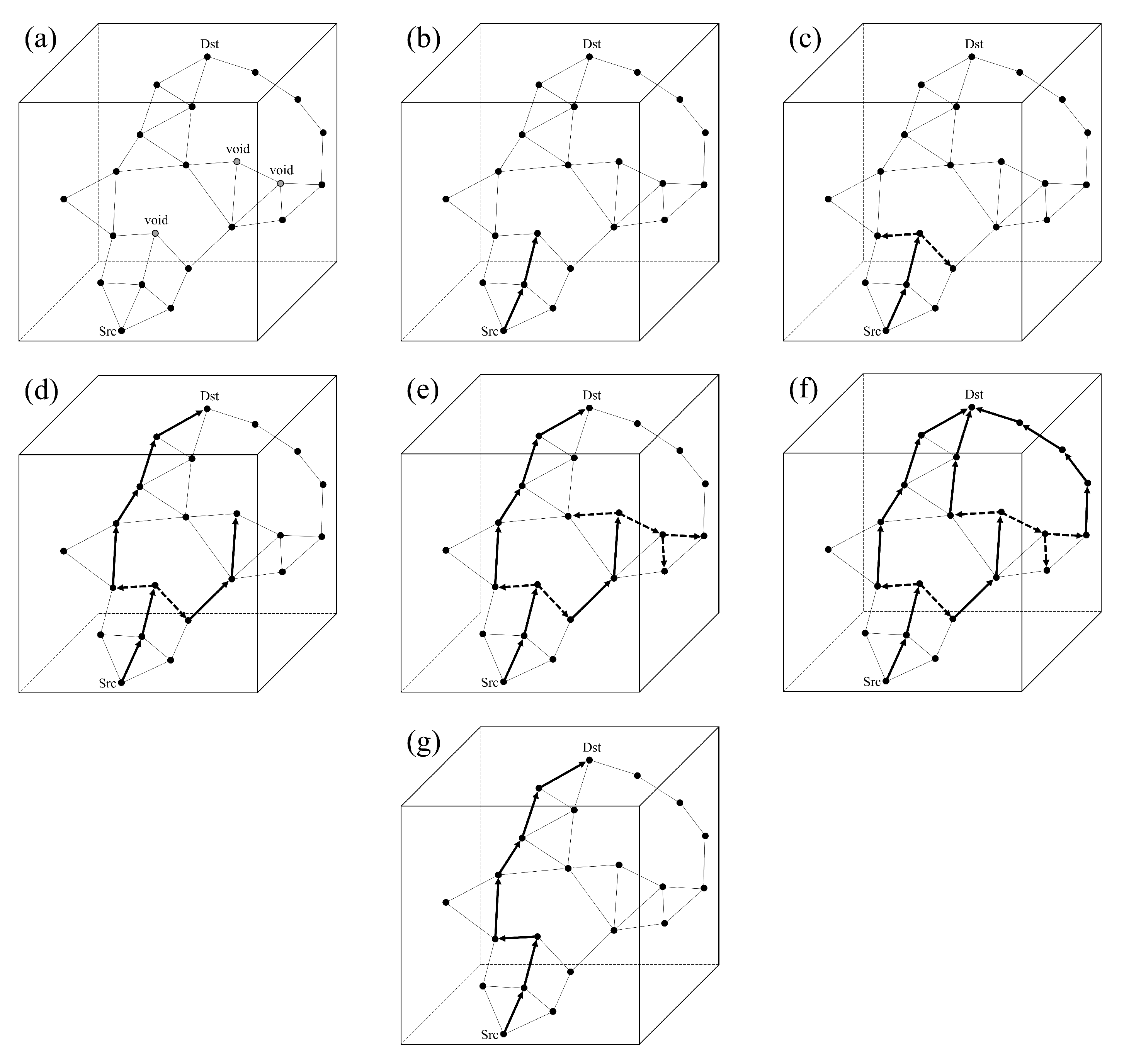
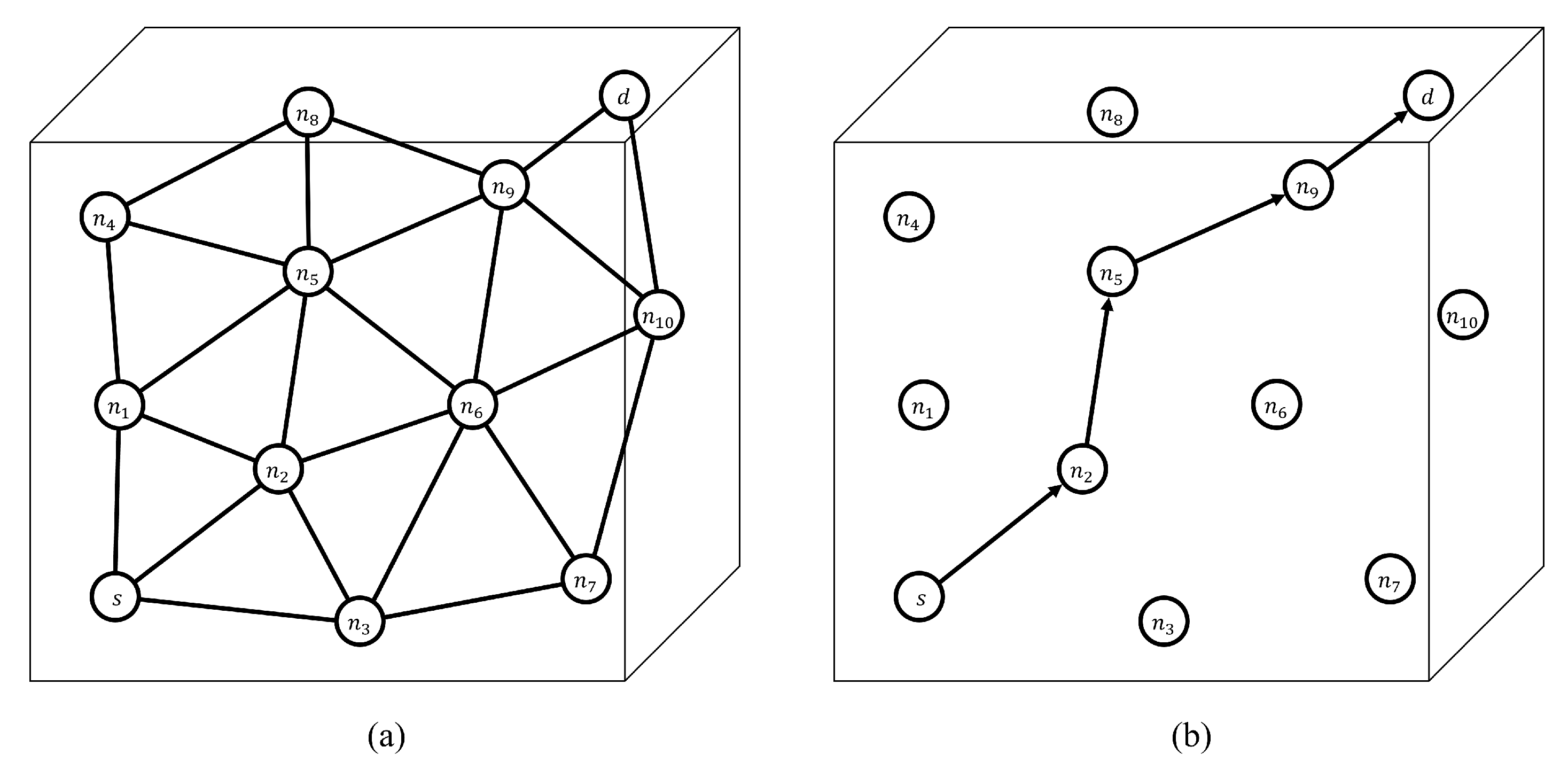
3.2. Greedy Forwarding and Void Handling Point-to-Point RPL in 3D Indoor Environments
4. Performance Evaluation
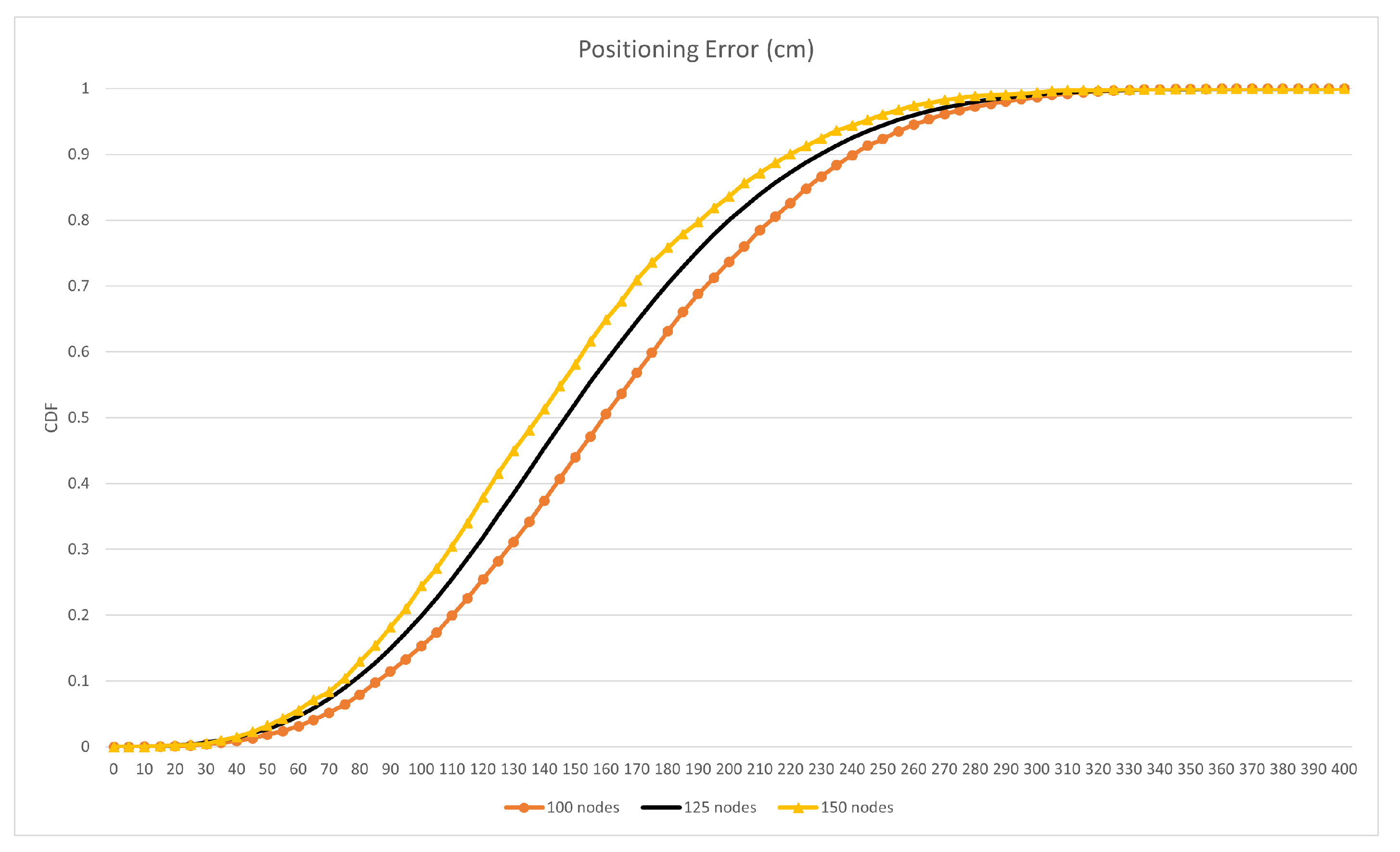
4.1. IR-UWB Based 3D Multi-Hop Self Localization with Bounding-Box and Mobile Tracking Scheme
4.2. Greedy Forwarding and Void Handling Point-to-Point RPL in 3D Indoor Environments
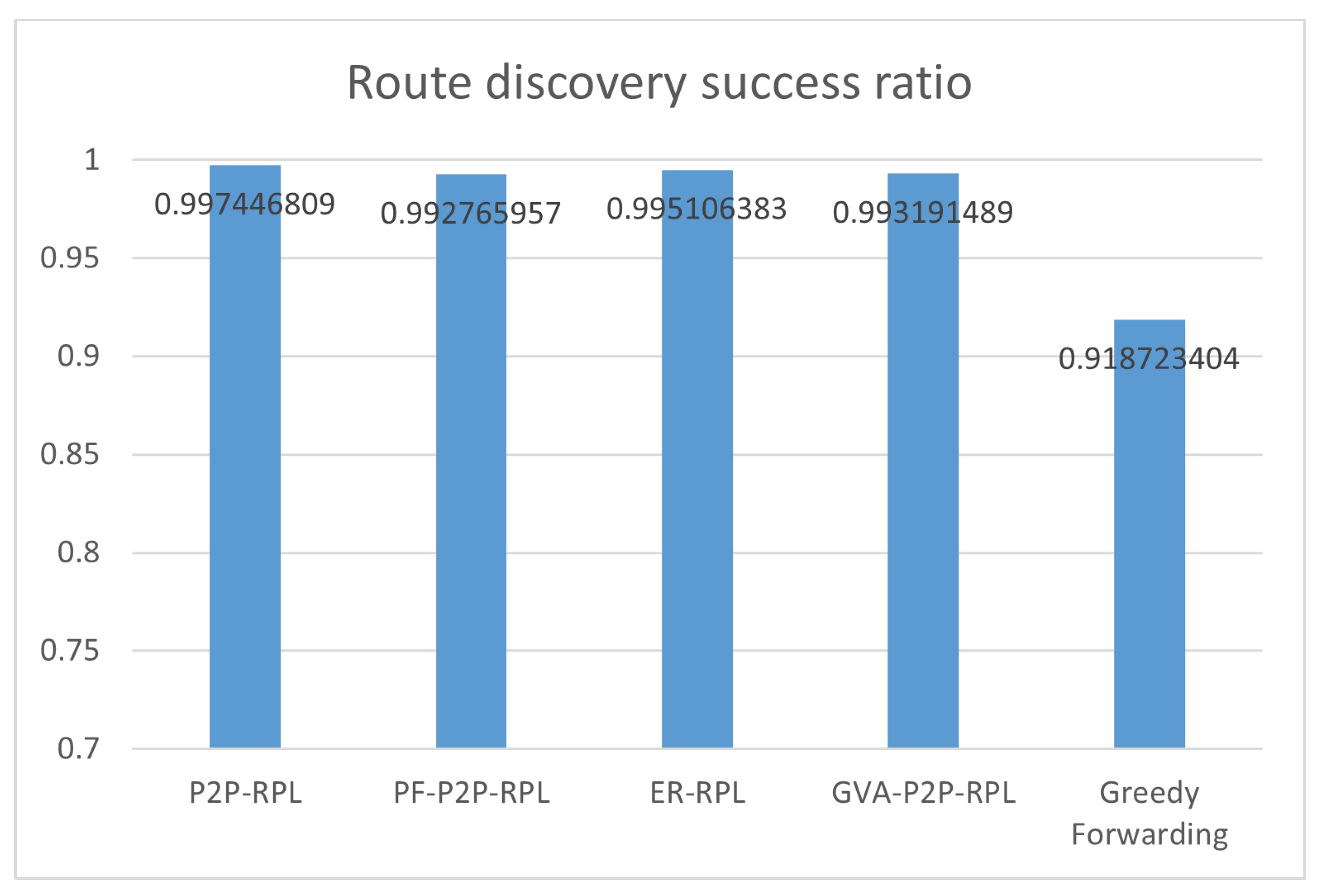
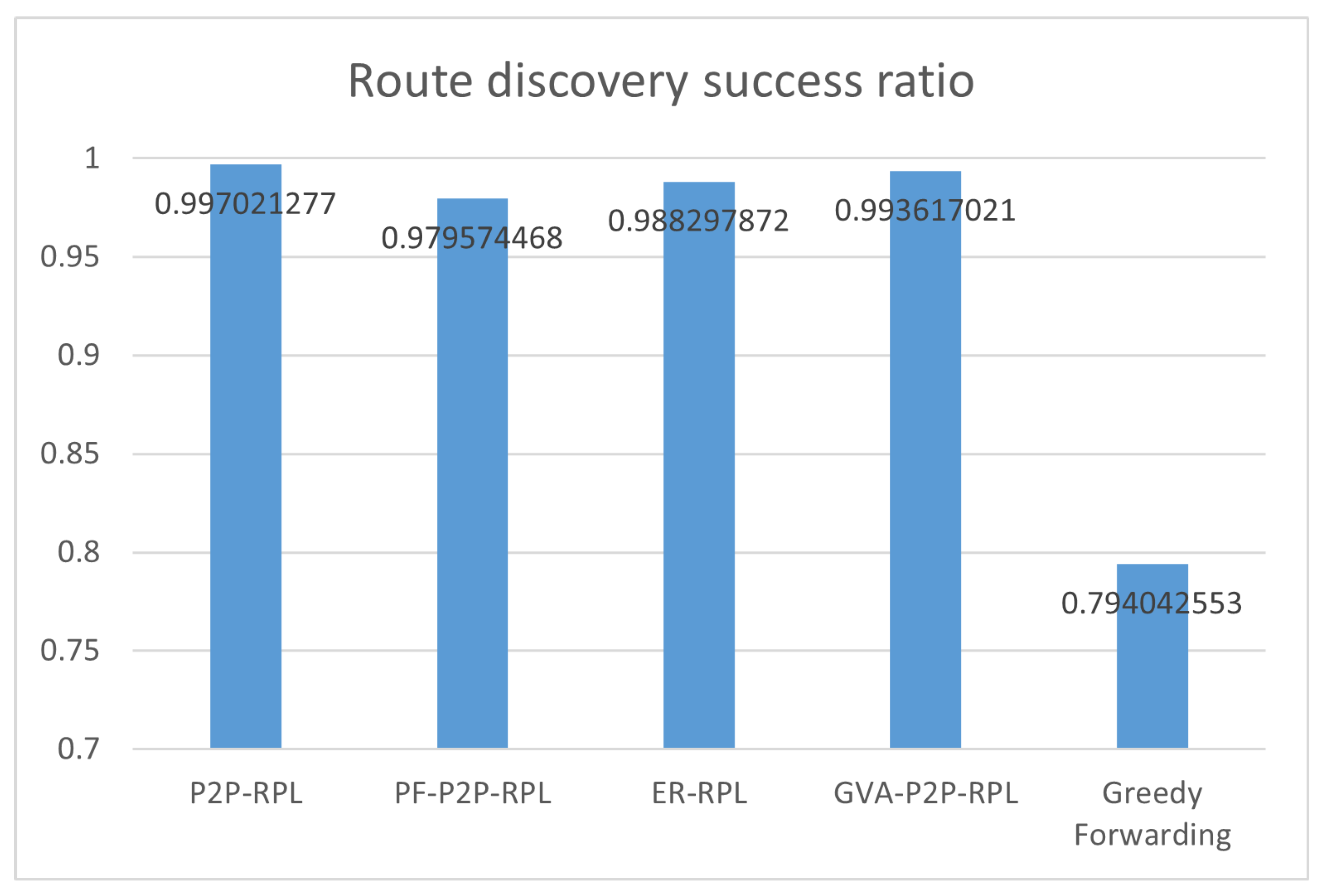
- Route discovery success ratio is the average ratio of the number of successful P2P route discovery attempts to that of the total P2P route discovery attempts.
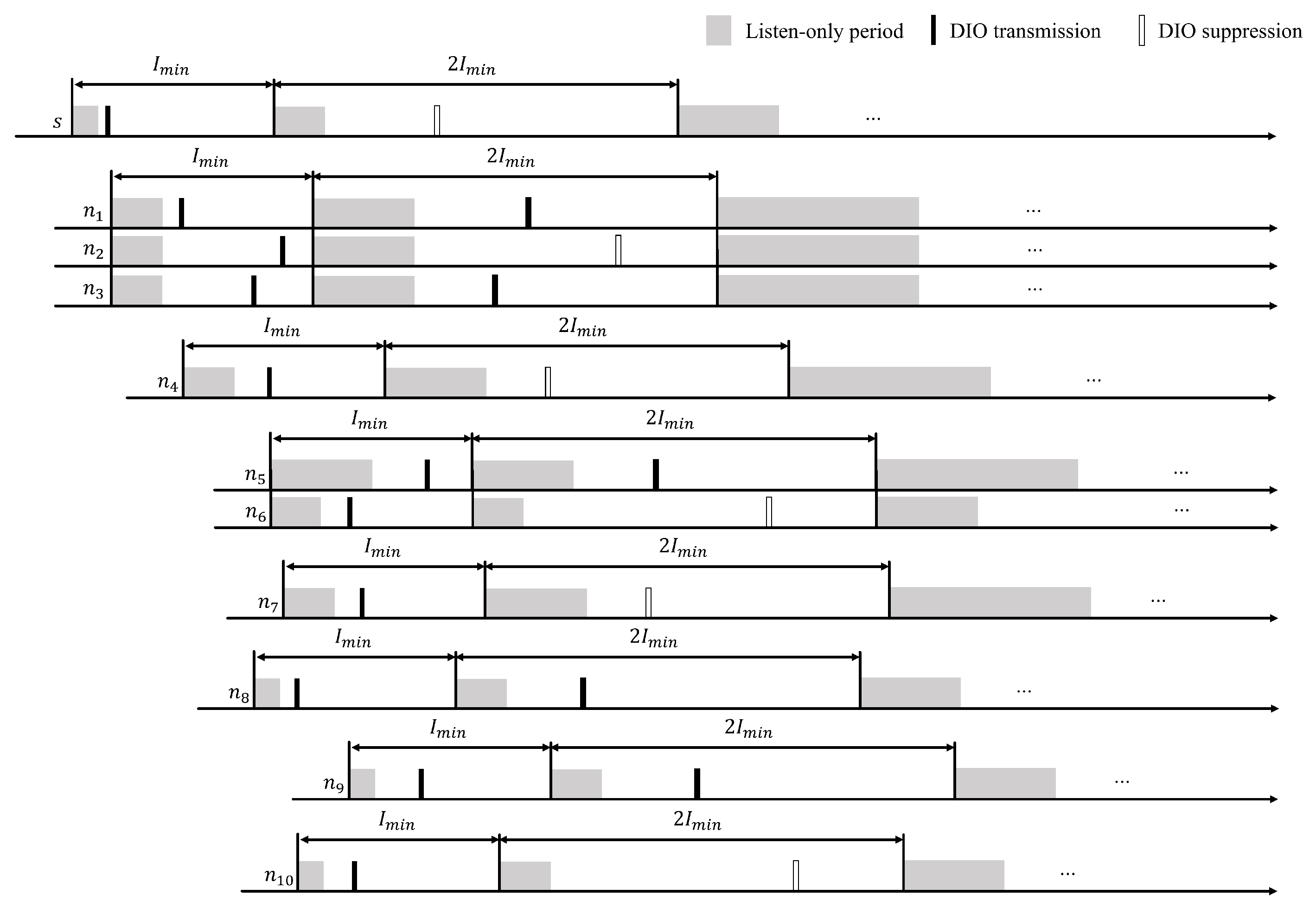
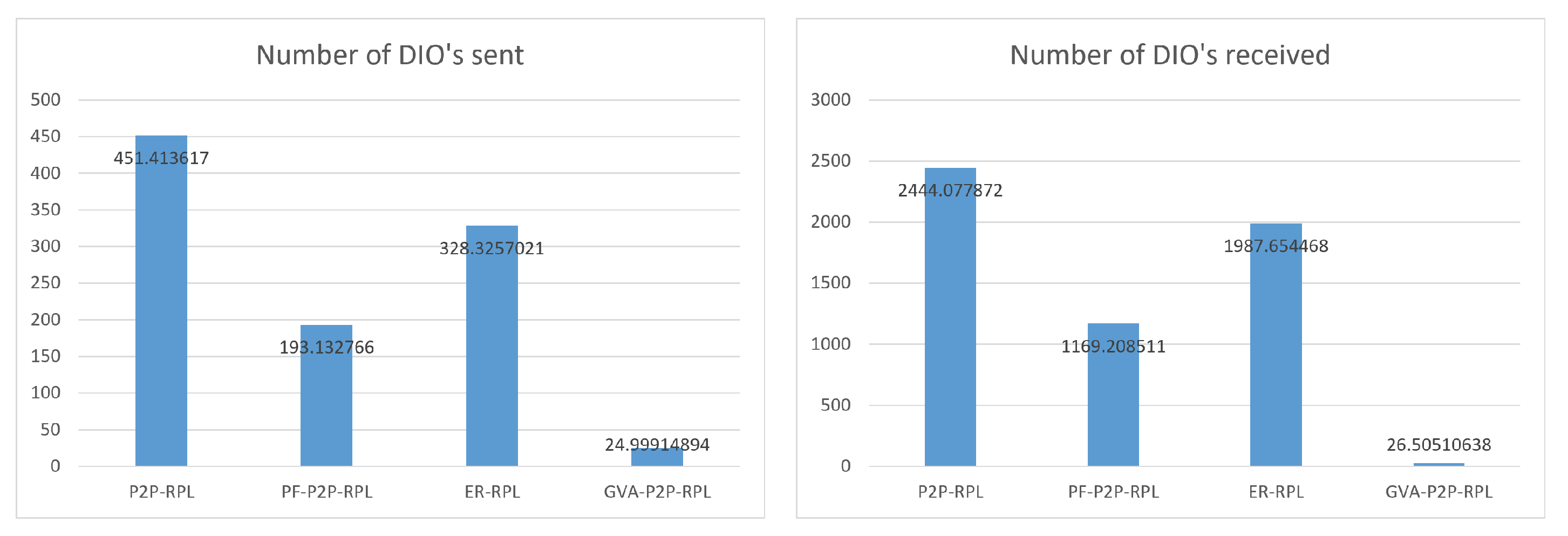
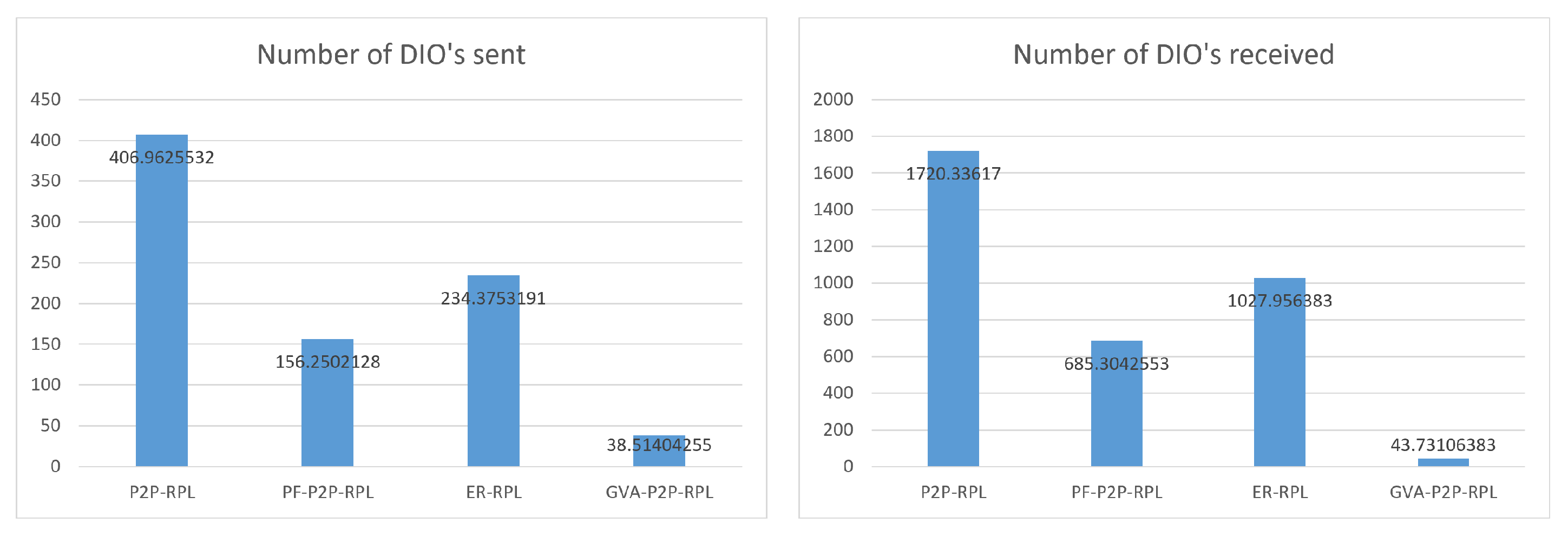
- Number of DIO’s sent is the average number of P2P-DIO messages sent by network nodes during the route discovery process.
- Number of DIO’s received is the average number of P2P-DIO messages received by network nodes during the route discovery process.
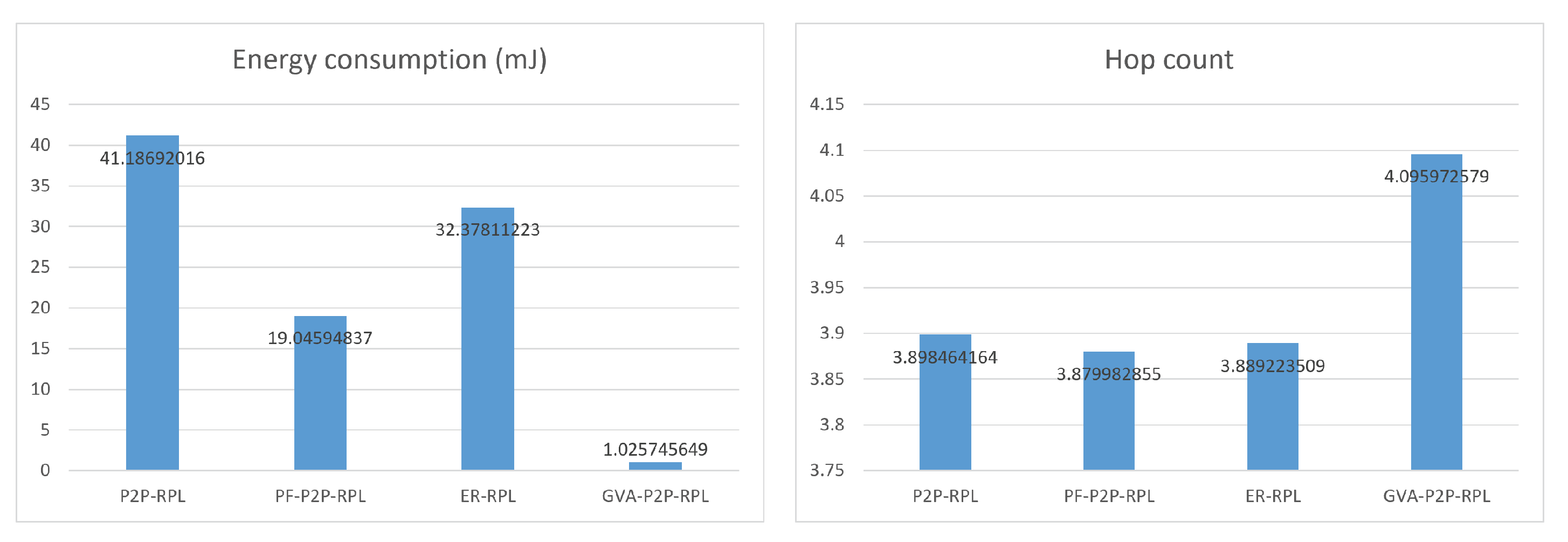
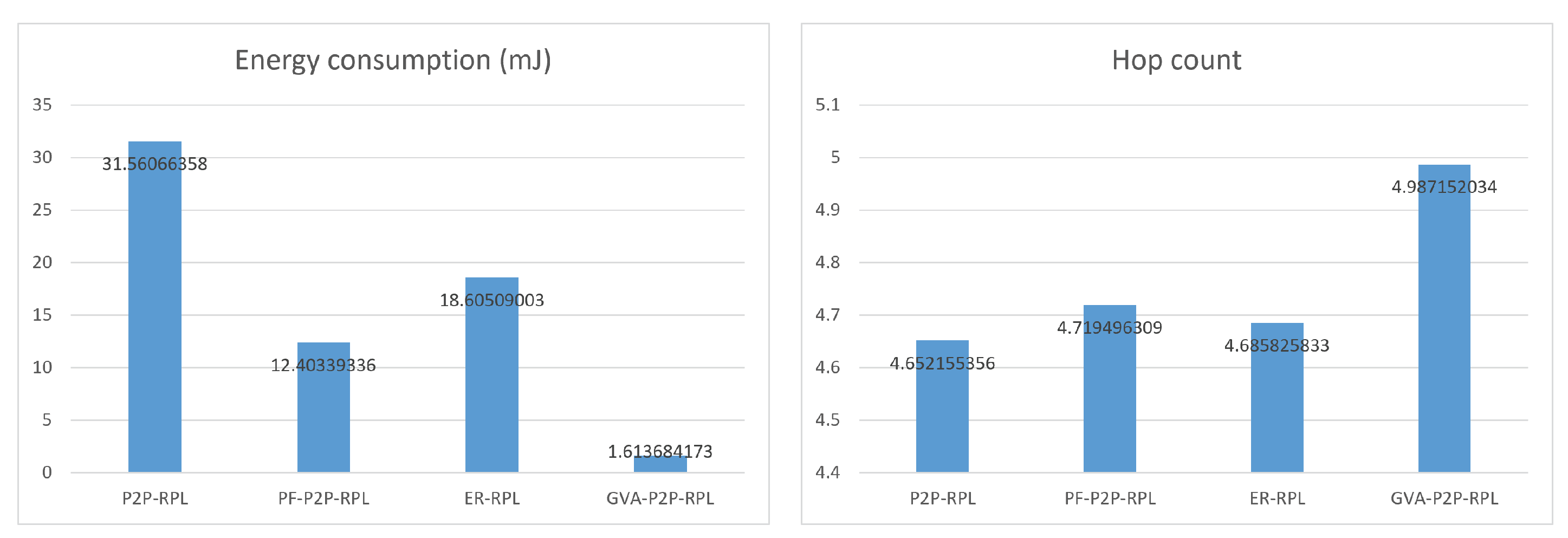
- Energy consumption is the average energy consumed during the whole route discovery interval, which is calculated according to the radio model parameters addressed in Table 2.
- Hop count is the average path length of discovered routes.
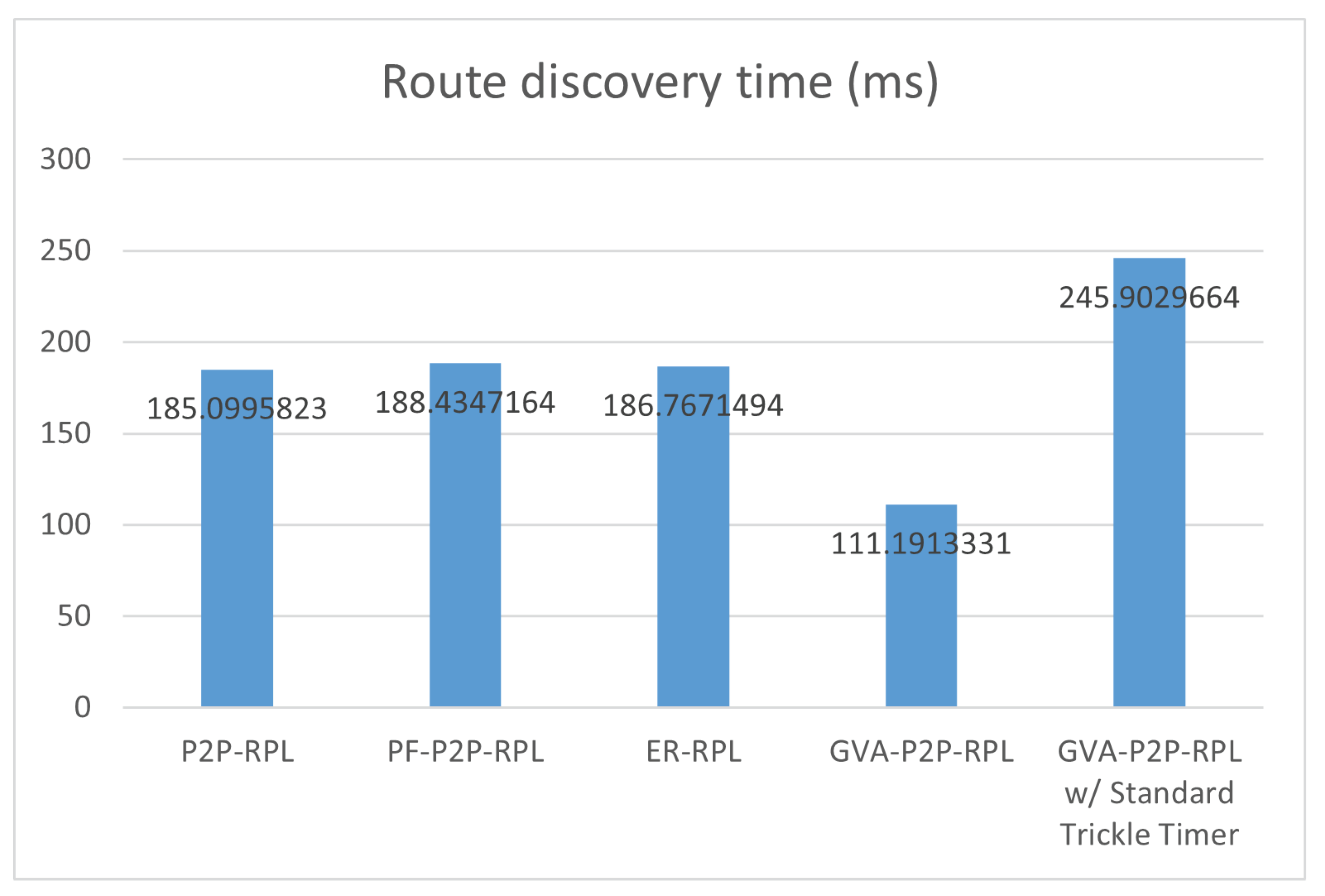
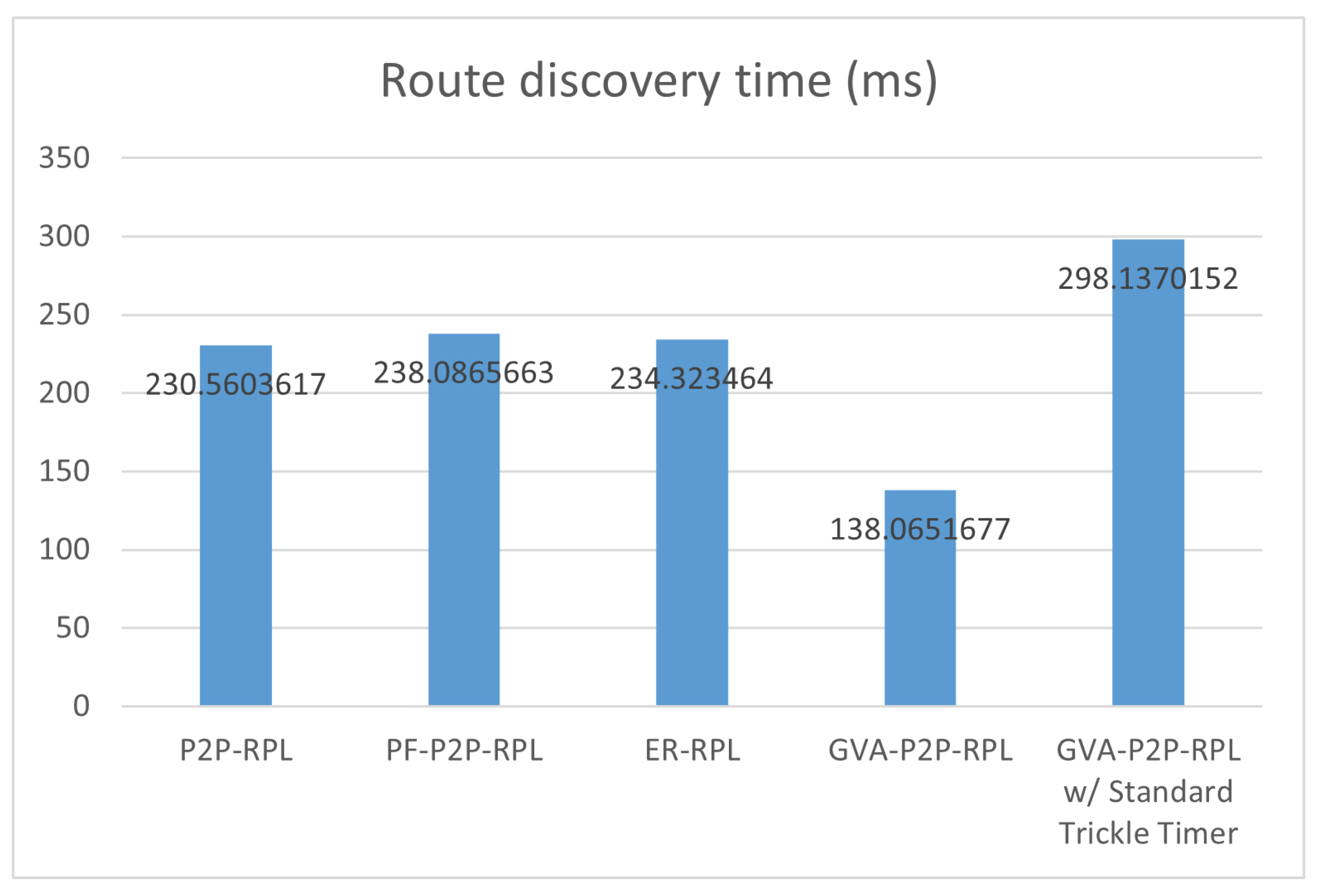
- The route discovery time is the average time passed from the route discovery initialization of the source node to the first receipt of any P2P-DIO message at the destination node.
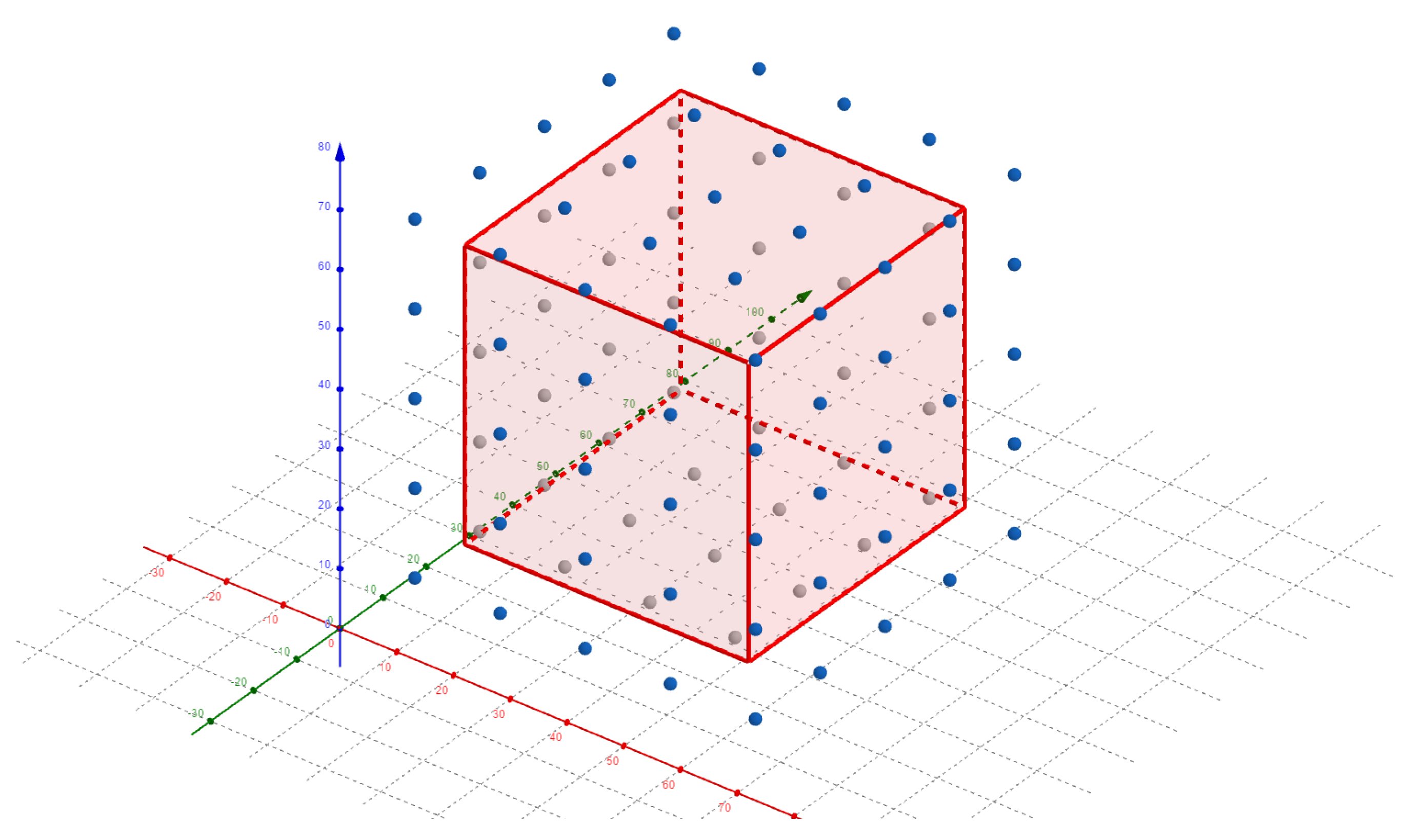
4.2.1. 125 Node Grid Deployment in 75 m × 75 m × 75 m Network Configuration
4.2.2. 98 Node Grid Deployment with Void Area in 75 m × 75 m × 75 m Network Configuration
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Goyal, M.; Baccelli, E.; Philipp, M.; Brandt, A.; Martocci, J. Reactive Discovery of Point-to-Point Routes in Low-Power and Lossy Networks. 2013. Available online: https://www.hjp.at/doc/rfc/rfc6997.html (accessed on 28 December 2021).
- Jung, J.; Choi, Y.; Kwon, Y. Location-Aware Point-to-Point RPL in Indoor IR-UWB Networks. Electronics 2020, 9, 861. [Google Scholar] [CrossRef]
- Zhao, M.; Ho, I.W.; Chong, P.H.J. An Energy-Efficient Region-Based RPL Routing Protocol for Low-Power and Lossy Networks. IEEE Internet Things J. 2016, 3, 1319–1333. [Google Scholar] [CrossRef] [Green Version]
- Alam, S.M.N.; Haas, Z.J. Coverage and connectivity in three-dimensional networks with random node deployment. Ad Hoc Netw. 2015, 34, 157–169. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Yin, H.; Luo, Y.; Zhang, X.; Min, G.; Fan, Q. Three-dimensional geographic routing in wireless mobile ad hoc and sensor networks. IEEE Netw. 2016, 2, 82–90. [Google Scholar] [CrossRef]
- Durocher, S.; Kirkpatrick, D.; Narayanan, L. On Routing with Guaranteed Delivery in Three-Dimensional Ad Hoc Wireless Networks. In Distributed Computing and Networking (ICDCN 2008). Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4904. [Google Scholar]
- Zhou, J.; Chen, Y.; Leong, B.; Sundaramoorthy, P.S. Practical 3D geographic routing for wireless sensor networks. In Proceedings of the 8th ACM Conference on Embedded Networked Sensor Systems (SenSys ’10), New York, NY, USA, 3–5 November 2010. [Google Scholar]
- Levis, P.; Clausen, T.; Hui, J.; Gnawali, O.; Ko, J. The Trickle Algorithm. 2011. Available online: https://www.hjp.at/doc/rfc/rfc6206.html (accessed on 28 December 2021).
- Winter, T.; Thubert, P.; Brandt, A.; Hui, J.; Kelsey, R.; Levis, P.; Pister, K.; Struik, R.; Vasseur, J.P.; Alexander, R. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. 2012. Available online: https://www.hjp.at/doc/rfc/rfc6550.html (accessed on 28 December 2021).
- Tang., C.; Zhang, Y.; Wu, Y. The P2P-RPL Routing Protocol Research and Implementation in Contiki Operating System. In Proceedings of the Second International Conference on Instrumentation, Measurement, Computer, Communication and Control, Harbin, China, 19 October 2012; pp. 1472–1475. [Google Scholar]
- Zhao, M.; Kumar, A.; Chong, P.H.; Lu, R. A comprehensive study of RPL and P2P-RPL routing protocols: Implementation, challenges and opportunities. Peer-Netw. Appl. 2016, 10, 1232–1256. [Google Scholar] [CrossRef]
- Simic, S.; Sastry, S. Distributed Localization in Wireless Ad Hoc Networks; Technical Report UCB/ERL; EECS UC Berkeley: Berkeley, CA, USA, 2002; Volume 2, pp. 1–13. [Google Scholar]
- Galstyan, A.; Krishnamachari, B.; Lerman, K.; Pattem, S. Distributed online localization in sensor networks using a moving target. In Proceedings of the Third International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004; pp. 61–70. [Google Scholar]
- Li, Y.; Zahran, S.; Zhuang, Y.; Gao, Z.; Luo, Y.; He, Z.; Pei, L.; Chen, R.; El-Sheimy, N. IMU/Magnetometer/Barometer/Mass-Flow Sensor Integrated Indoor Quadrotor UAV Localization with Robust Velocity Updates. Remote Sens. 2019, 11, 838. [Google Scholar] [CrossRef] [Green Version]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology; Institution of Electrical Engineers: London, UK, 1997. [Google Scholar]
- Shin, E.H. Estimation Techniques for Low-Cost Inertial Navigation; UCGE Reports Number 20219; The University of Calgary: Calgary, AB, Canada, 2005. [Google Scholar]
- Ruiz, A.R.J.; Granja, F.S. Comparing ubisense, bespoon, and decawave uwb location systems: Indoor performance analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- You, W.; Li, F.; Liao, L.; Huang, M. Data Fusion of UWB and IMU Based on Unscented Kalman Filter for Indoor Localization of Quadrotor UAV. IEEE Access 2020, 8, 64971–64981. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, X.; Zhang, W.; Liu, X.; Guo, Y. A Nonlinear Double Model for Multisensor-Integrated Navigation Using the Federated EKF Algorithm for Small UAVs. Sensors 2020, 20, 2974. [Google Scholar] [CrossRef] [PubMed]
- Yassein, M.B.; Aljawarneh, S.; Masa’deh, E. A new elastic trickle timer algorithm for Internet of Things. J. Netw. Comput. Appl. 2017, 89, 38–47. [Google Scholar] [CrossRef]
- Ghaleb, B.; Al-Dubai, A.; Ekonomou, E.; Paechter, B.; Qasem, M. Trickle-Plus: Elastic Trickle Algorithm for Low- Power Networks and Internet of Things. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference (WCNCW), Doha, Qatar, 3–6 April 2016; pp. 103–108. [Google Scholar]
- DW1000 Radio IC. Available online: https://www.decawave.com/product/dw1000-radio-ic/ (accessed on 30 December 2021).
- IEEE Standard 802.15.4a-2007; IEEE Standard for Information Technology—Local and Metropolitan Area Networks—Specific Requirements—Part 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for LowRate Wireless Personal Area Networks (WPANs): Amendment 1: Add Alternate PHYs. IEEE Standards Association: Piscataway, NJ, USA, 2007.
- Charlier, M.; Quoitin, B.; Bette, S.; Eliasson, J. Support for IEEE 802.15. 4 ultra wideband communications in the Contiki operating system. In Proceedings of the 2016 Symposium on Communications and Vehicular Technologies (SCVT), Mons, Belgium, 22 November 2016; pp. 1–6. [Google Scholar]
- The Contiki Open Source OS for the Internet of Things. Available online: https://github.com/contiki-os/contiki (accessed on 28 December 2021).
- P2P-RPL Implementation on Contiki OS. Available online: http://contiki-p2p-rpl.gforge.inria.fr (accessed on 28 December 2021).
- Rosa, J.H.; Barbosa, J.L.V.; Kich, M.; Brito, L. A Multi-Temporal Context-aware System for Competences Management. Int. J. Artif. Intell. Educ. 2015, 25, 455–492. [Google Scholar] [CrossRef] [Green Version]
- Rosa, J.H.; Barbosa, J.L.V.; Ribeiro, G.D. ORACON: An Adaptive Model for Context Prediction. Expert Syst. Appl. 2016, 45, 56–70. [Google Scholar] [CrossRef]
- Filippetto, A.S.; Lima, R.; Barbosa, J.L.V. A Risk Prediction Model for Software Project Management Based on Similarity Analysis of context Histories. Inf. Softw. Technol. 2021, 131, 106497. [Google Scholar] [CrossRef]
- Dupont, D.; Barbosa, J.L.V.; Alves, B.M. CHSPAM: A multi-domain model for sequential pattern discovery and monitoring in contexts histories. Pattern Anal. Appl. 2020, 23, 725–734. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Protocol Name | Type | Routing Strategy | Overhead |
|---|---|---|---|
| P2P-RPL | Reactive | flooding whole network | High |
| LA-P2P-RPL | Reactive | flooding restricted zone | Medium |
| ER-RPL | Proactive/Reactive | flooding selected regions | Medium |
| GVA-P2P-RPL | Geographical | greedy forwarding | Low |
| Parameter | Value |
|---|---|
| UWB Channel Number | 5 |
| Center Frequency | 6489.6 MHz |
| Band | 6240–6739.2 MHz |
| Bandwidth | 499.2 MHz |
| Pulse Repetition Frequency (PRF) | 16 MHz |
| Data Rate | 6.81 Mbps |
| Number of symbols in the preamble | 128 |
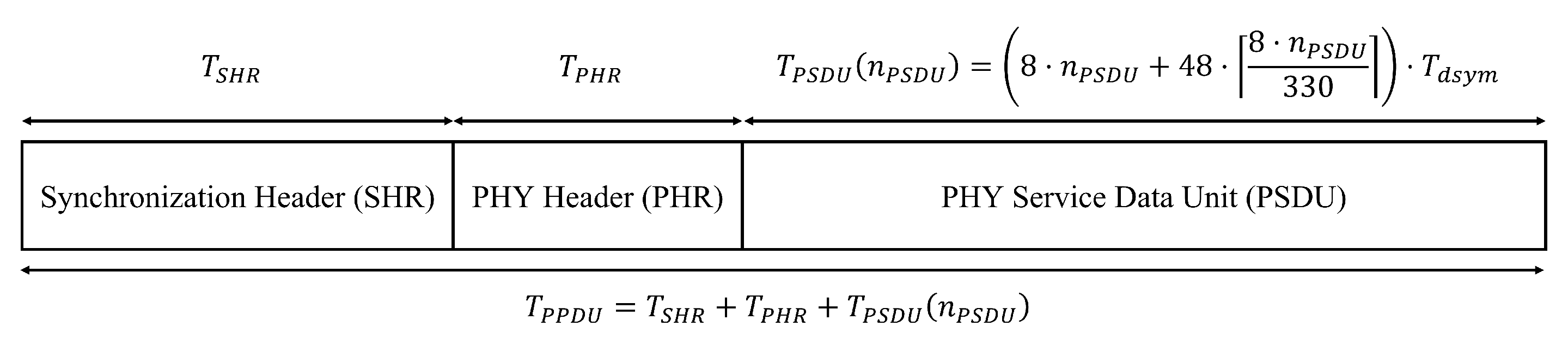
| Transmission time of the Synchronization Header (SHR) () | 135.13 us |
| Transmission time of the PHY Header (PHR) () | 21.54 us |
| Data symbol duration () | 128.21 ns |
| Parameter | Value |
|---|---|
| Radio environment | UDGM with distance loss |
| Communication Range | 20 m |
| Transmission success ratio | 100% |
| Reception success ratio (%) | 90% |
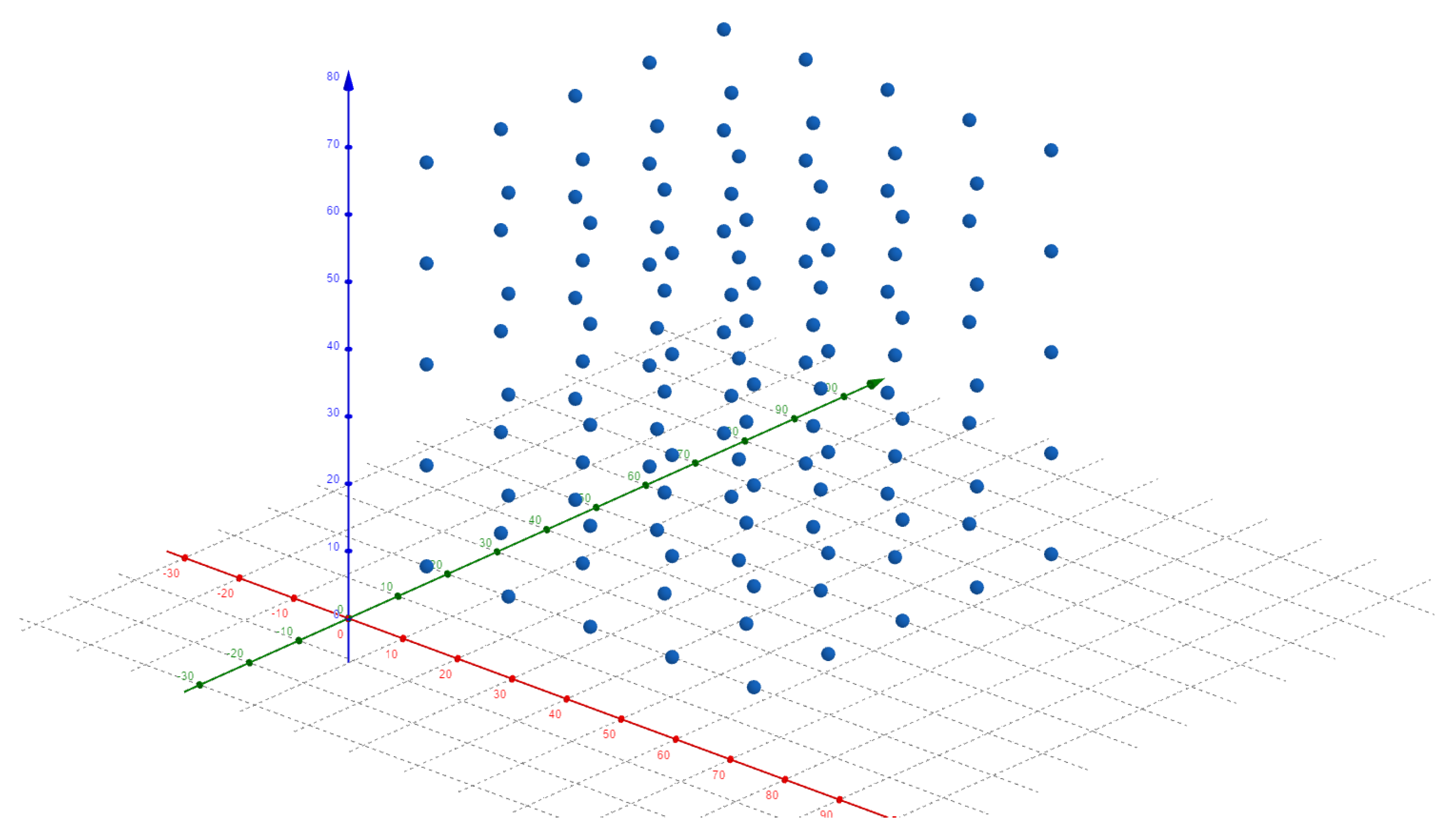
| Network size | 75 m × 75 m × 75 m |
| Number of nodes | 125, 98 with void |
| Node deployment | grid with (±5 m, ±5 m, ±5 m) randomness |
| P2P-RPL DAG lifetime | 16 s |
| P2P-DRO wait time | 1 s |
| P2P-RPL mode of operation | Non-storing mode |
| Objective function | MRHOF |
| Routing metric | ETX |
| ms, ms | |
| ms | |
| Redundancy constant (k) | 1 (except when ) |
| Transmitter electronics () | 33.97 nJ/bit |
| Transmitter amplifier () | 6 pJ/bit/ |
| Receiver electronics () | 14.56 nJ/bit |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Jung, J.; Kwon, Y. 3D Void Handling Geographic P2P-RPL for Indoor Multi-Hop IR-UWB Networks. Electronics 2022, 11, 625. https://doi.org/10.3390/electronics11040625
Kim D, Jung J, Kwon Y. 3D Void Handling Geographic P2P-RPL for Indoor Multi-Hop IR-UWB Networks. Electronics. 2022; 11(4):625. https://doi.org/10.3390/electronics11040625
Chicago/Turabian StyleKim, Dongwon, Jiwon Jung, and Younggoo Kwon. 2022. "3D Void Handling Geographic P2P-RPL for Indoor Multi-Hop IR-UWB Networks" Electronics 11, no. 4: 625. https://doi.org/10.3390/electronics11040625
APA StyleKim, D., Jung, J., & Kwon, Y. (2022). 3D Void Handling Geographic P2P-RPL for Indoor Multi-Hop IR-UWB Networks. Electronics, 11(4), 625. https://doi.org/10.3390/electronics11040625