




Wide-Speed-Range Sensorless Control of IPMSM



Abstract
1. Introduction
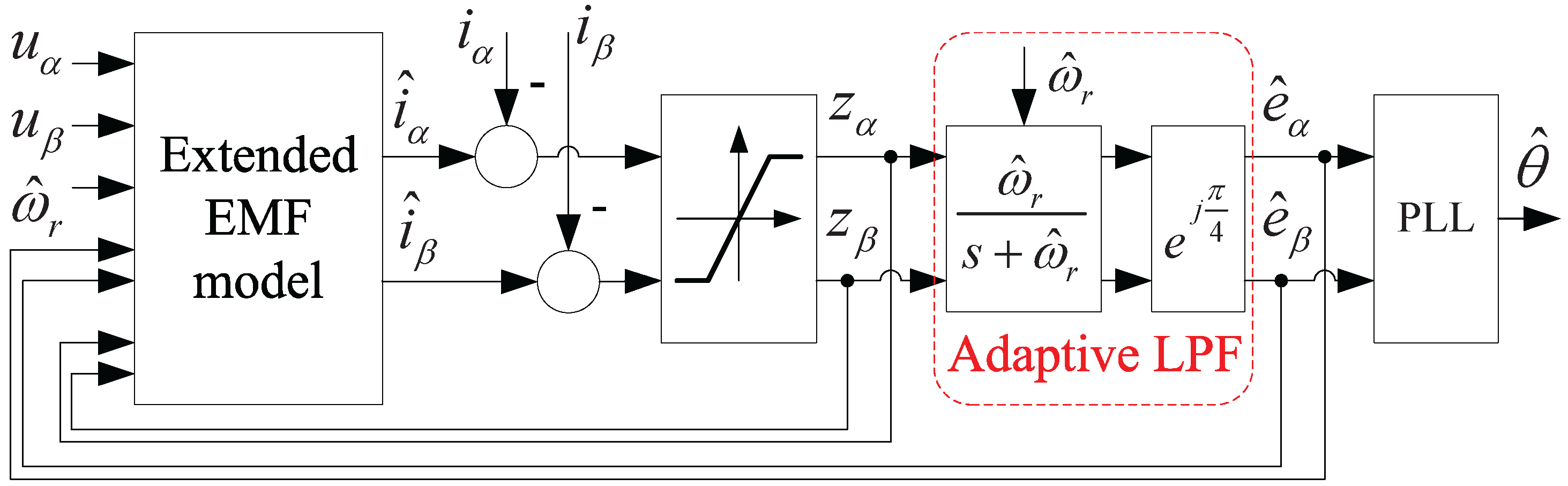
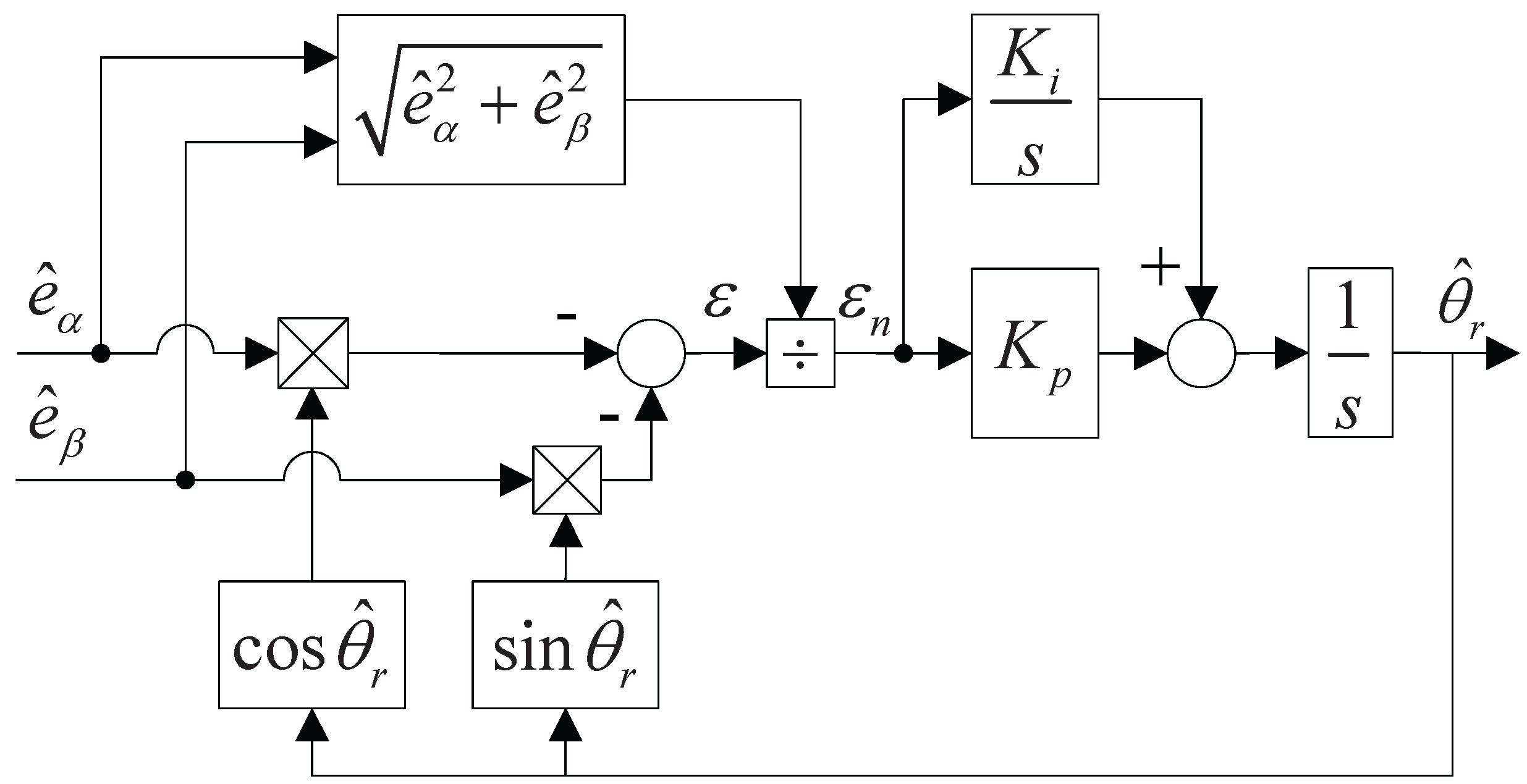
2. Sliding-Mode Observer Method for High-Speed-Range Sensorless Control
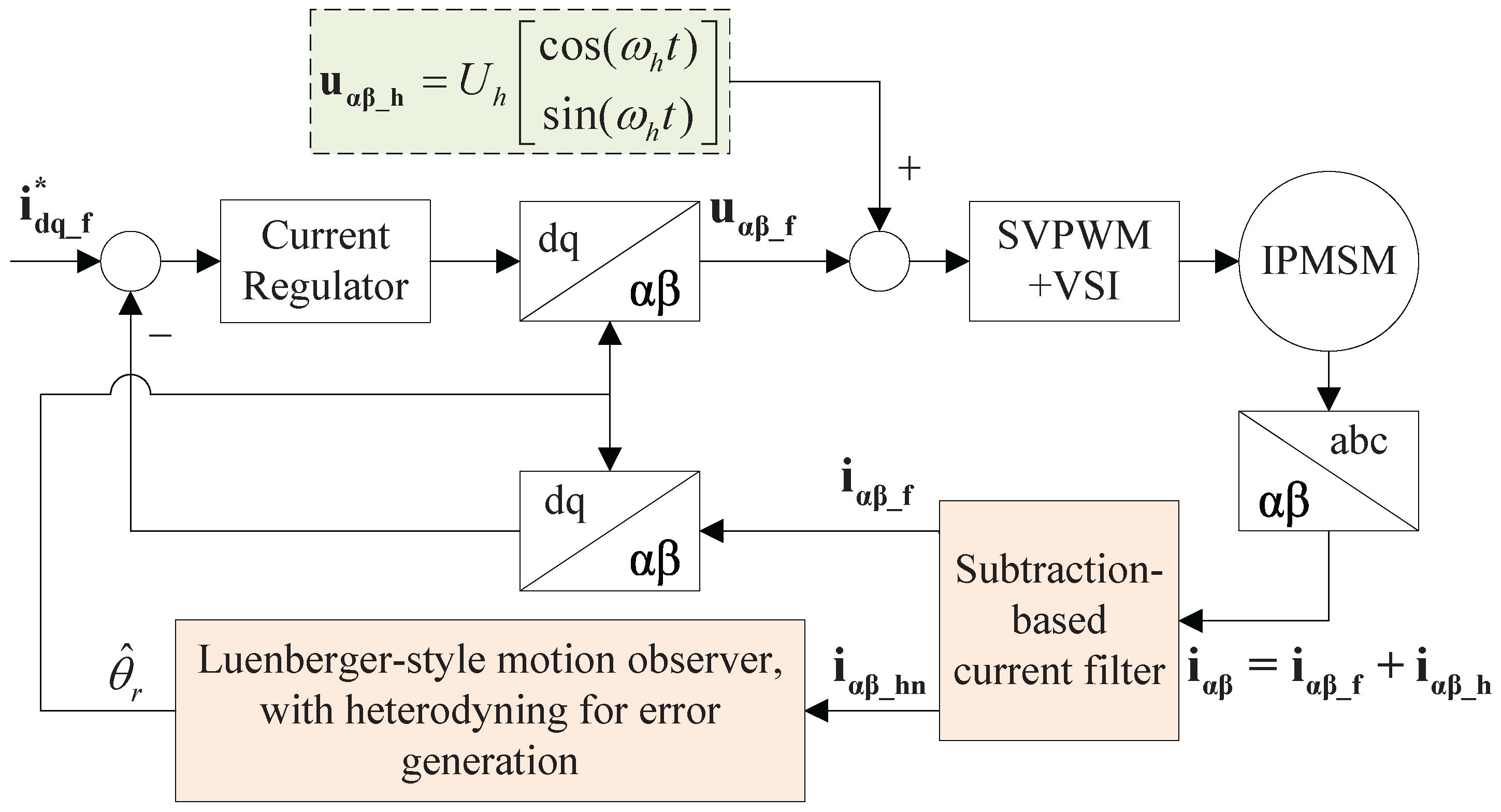
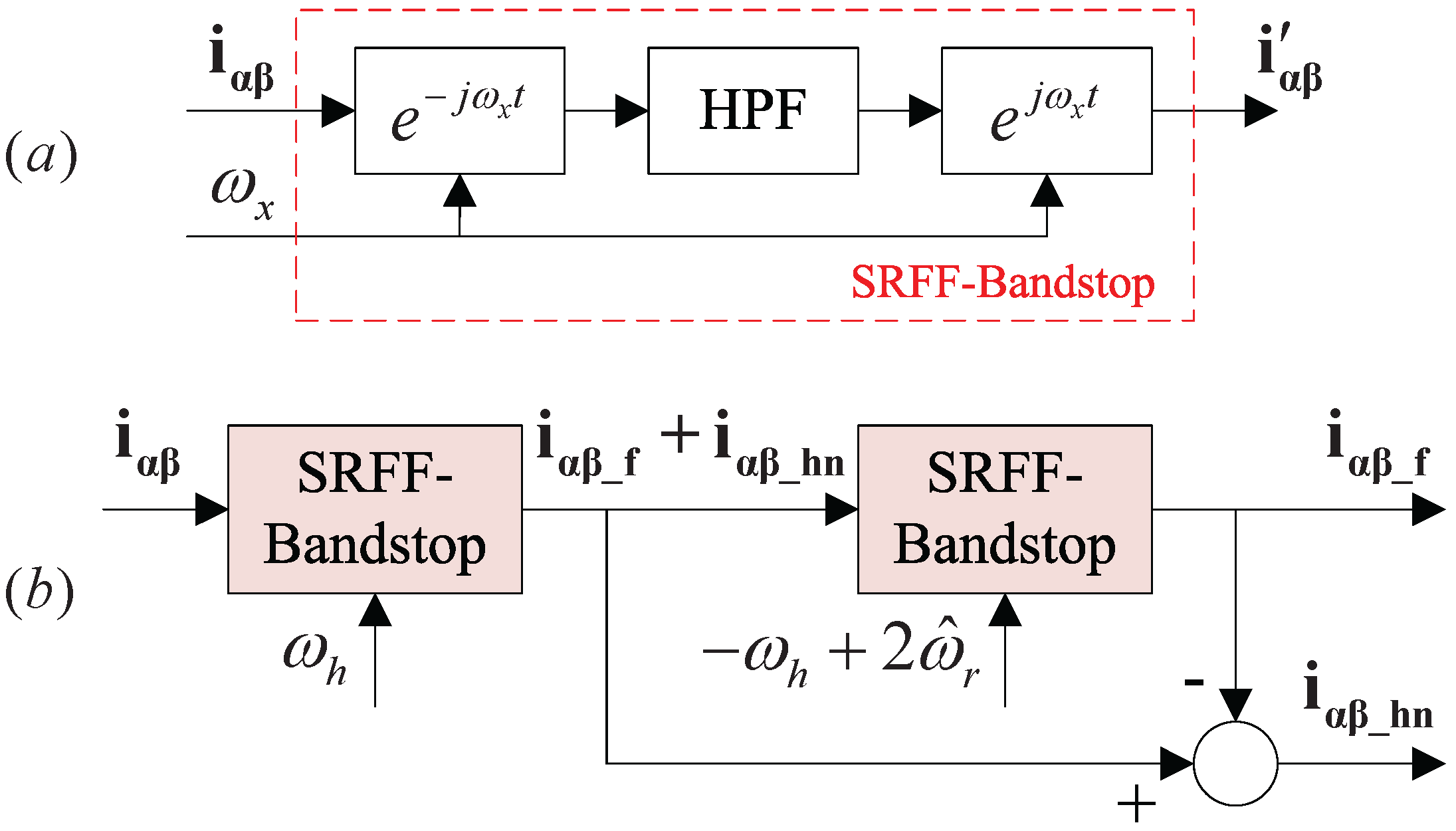
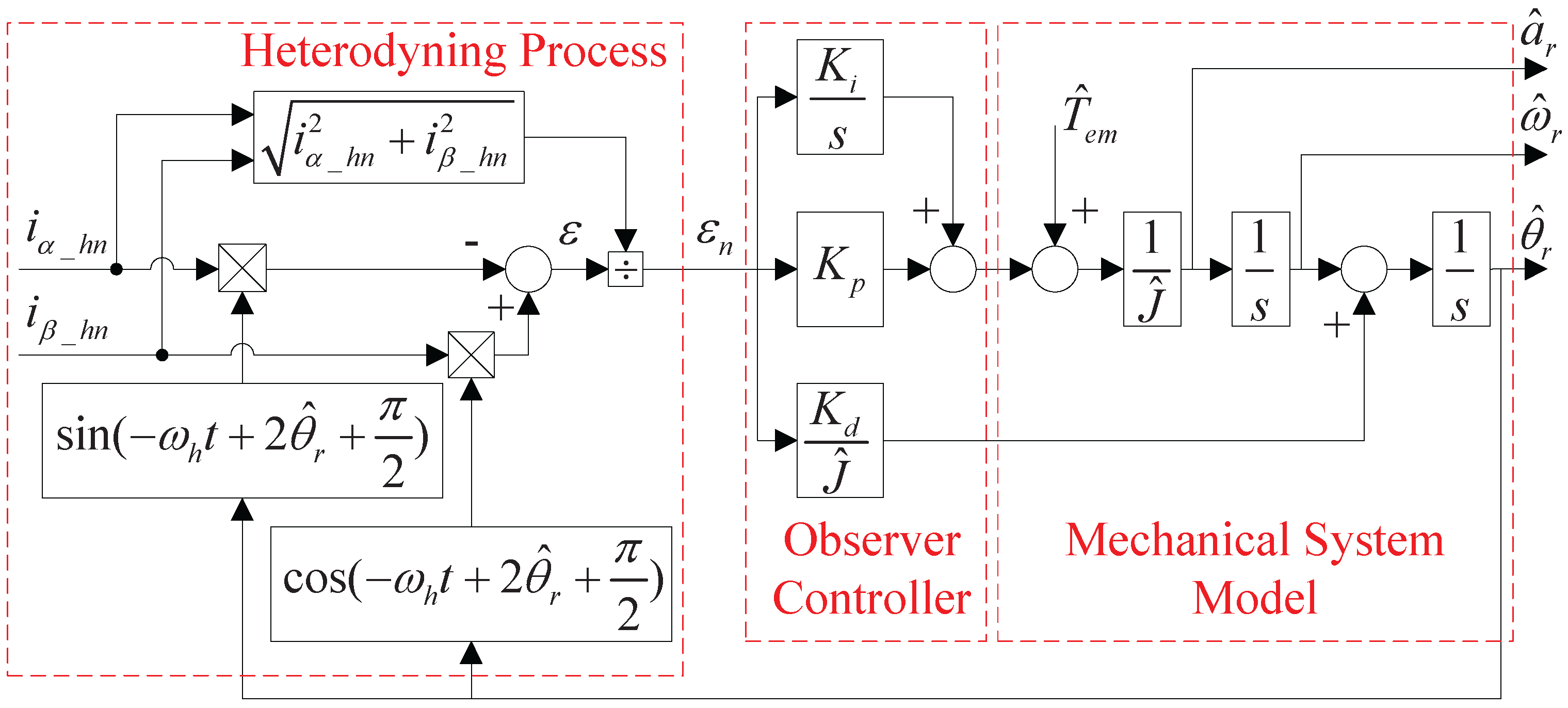
3. Rotating Voltage High-Frequency Injection Method for Low-Speed-Range Sensorless Control
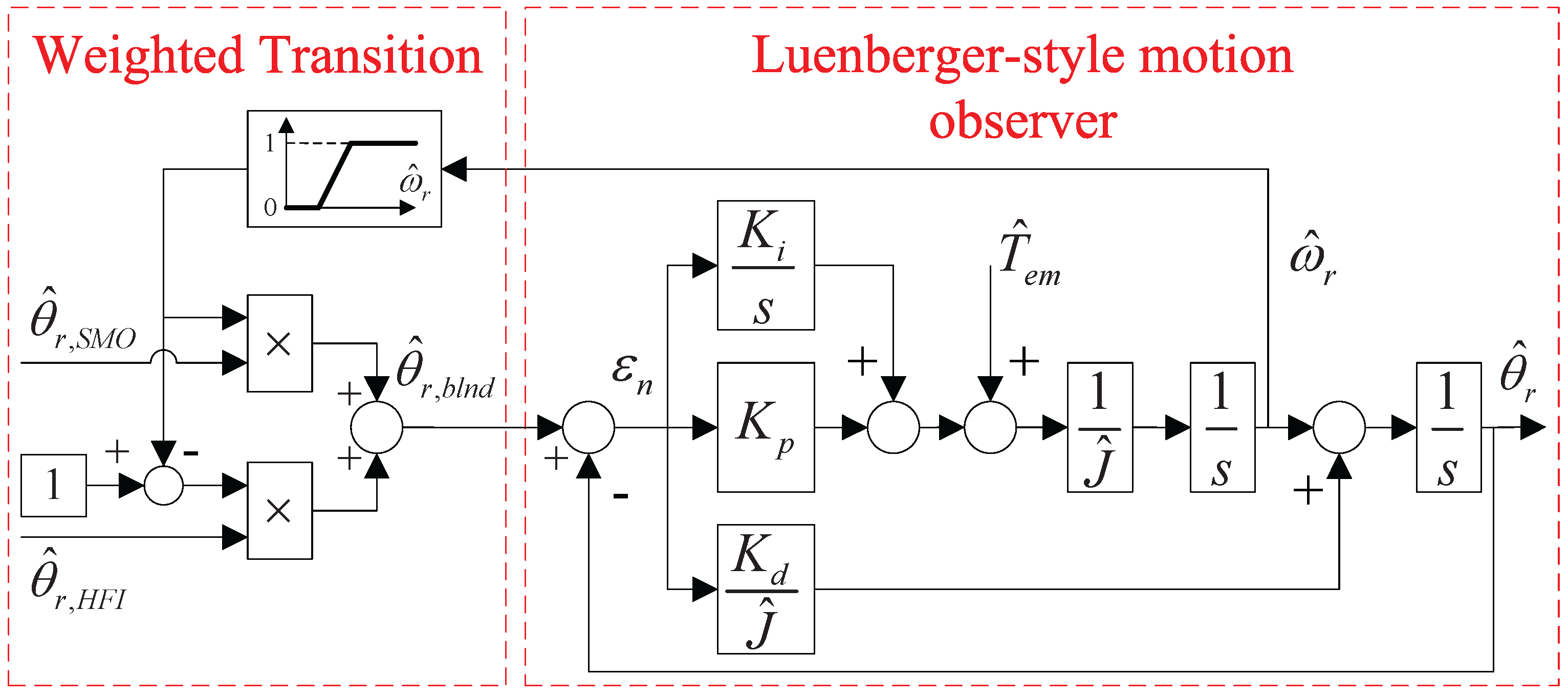
4. Transition between the High-Speed and Low-Speed Sensorless Control
5. Experimental Results
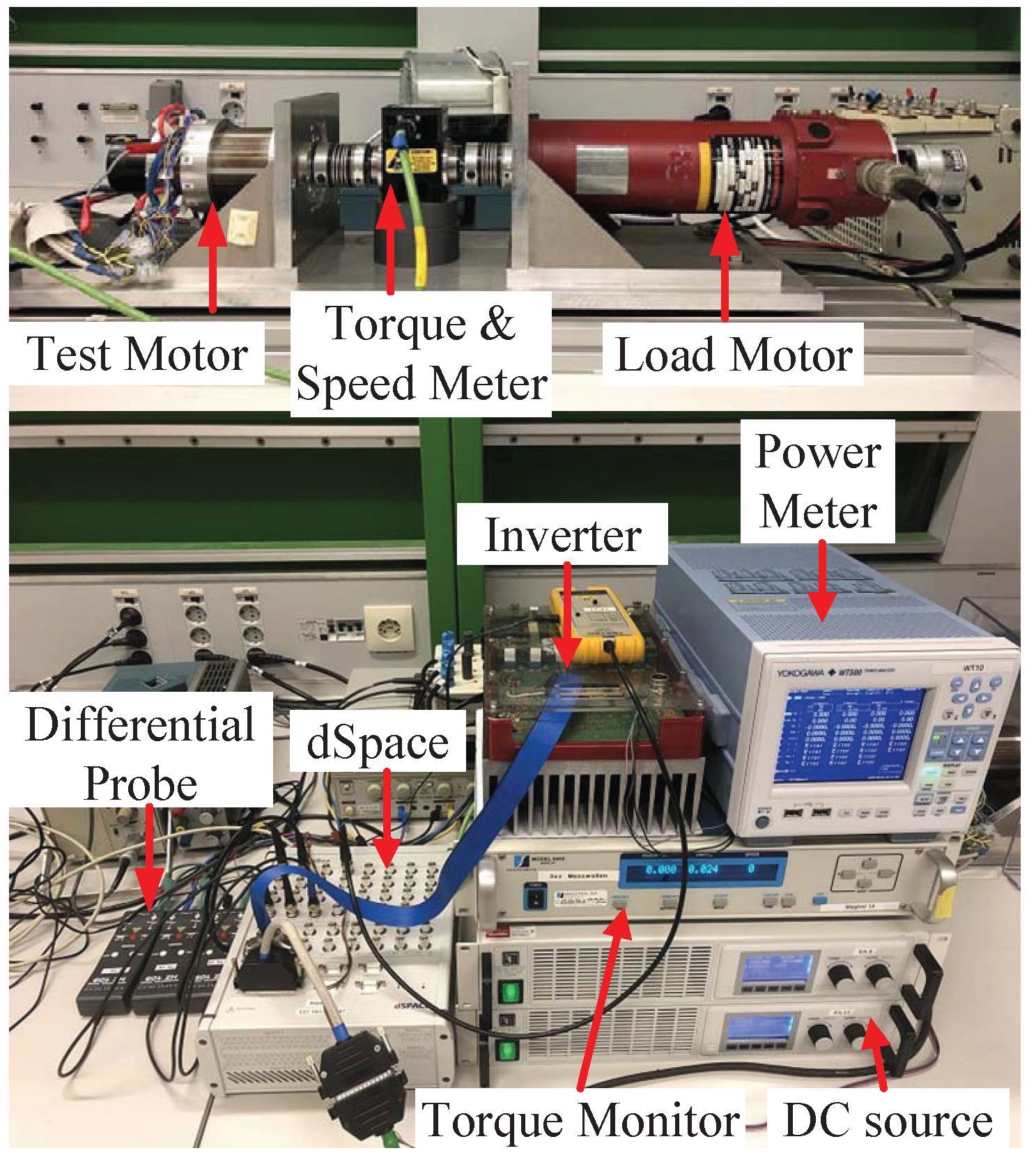
5.1. Test Bench Introduction
5.2. Position Estimation Based on SMO Method for High-Speed Range
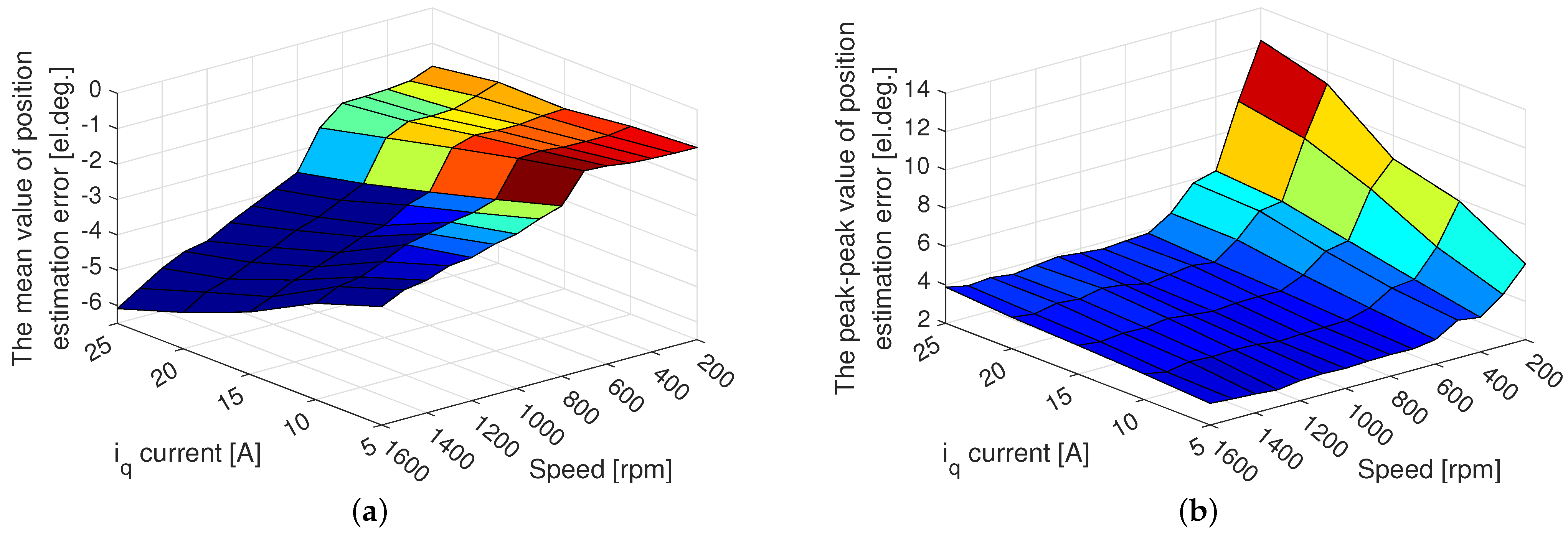
5.2.1. Steady-State Experiments of Sensorless Control Based on SMO Method
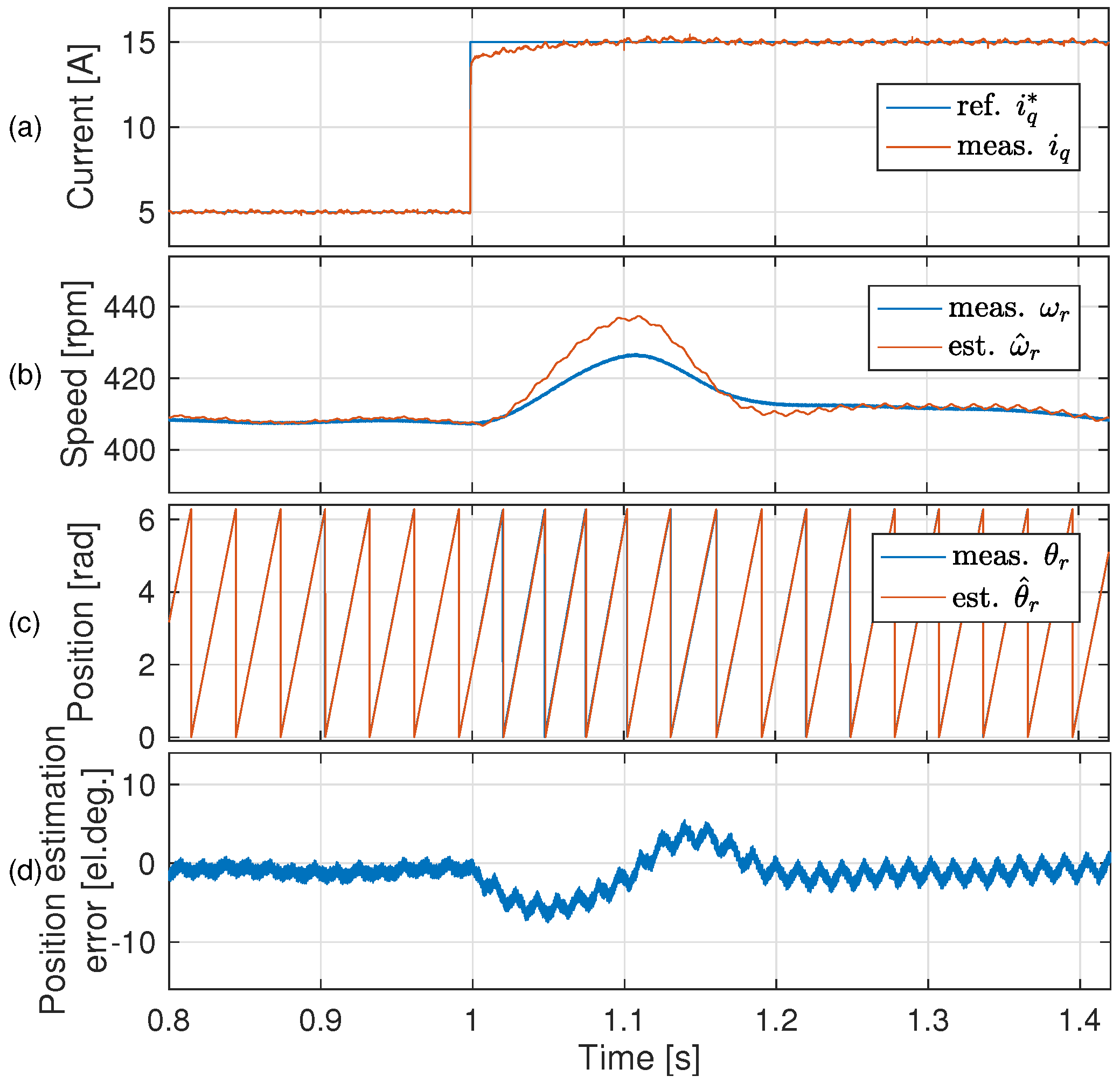
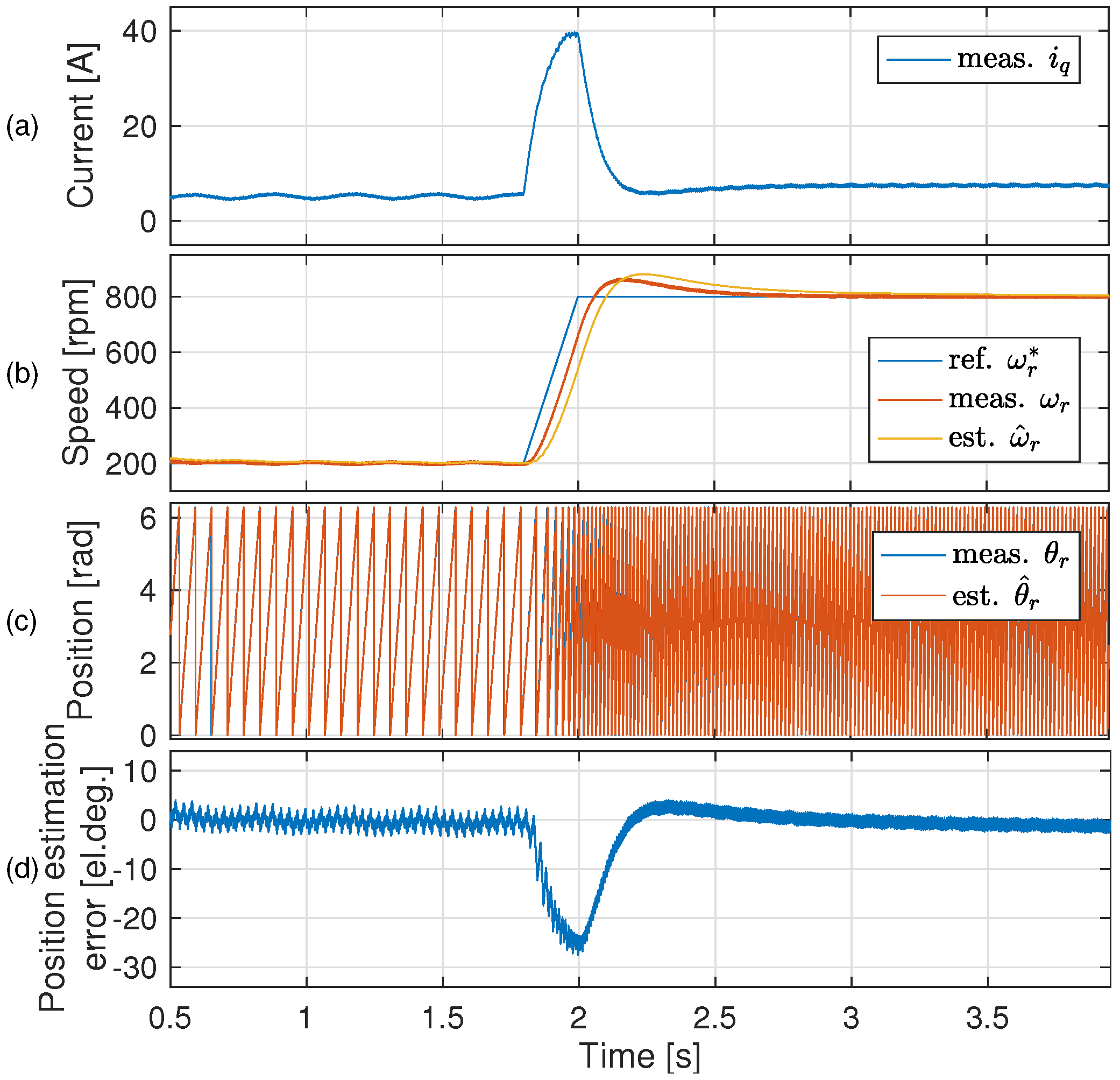
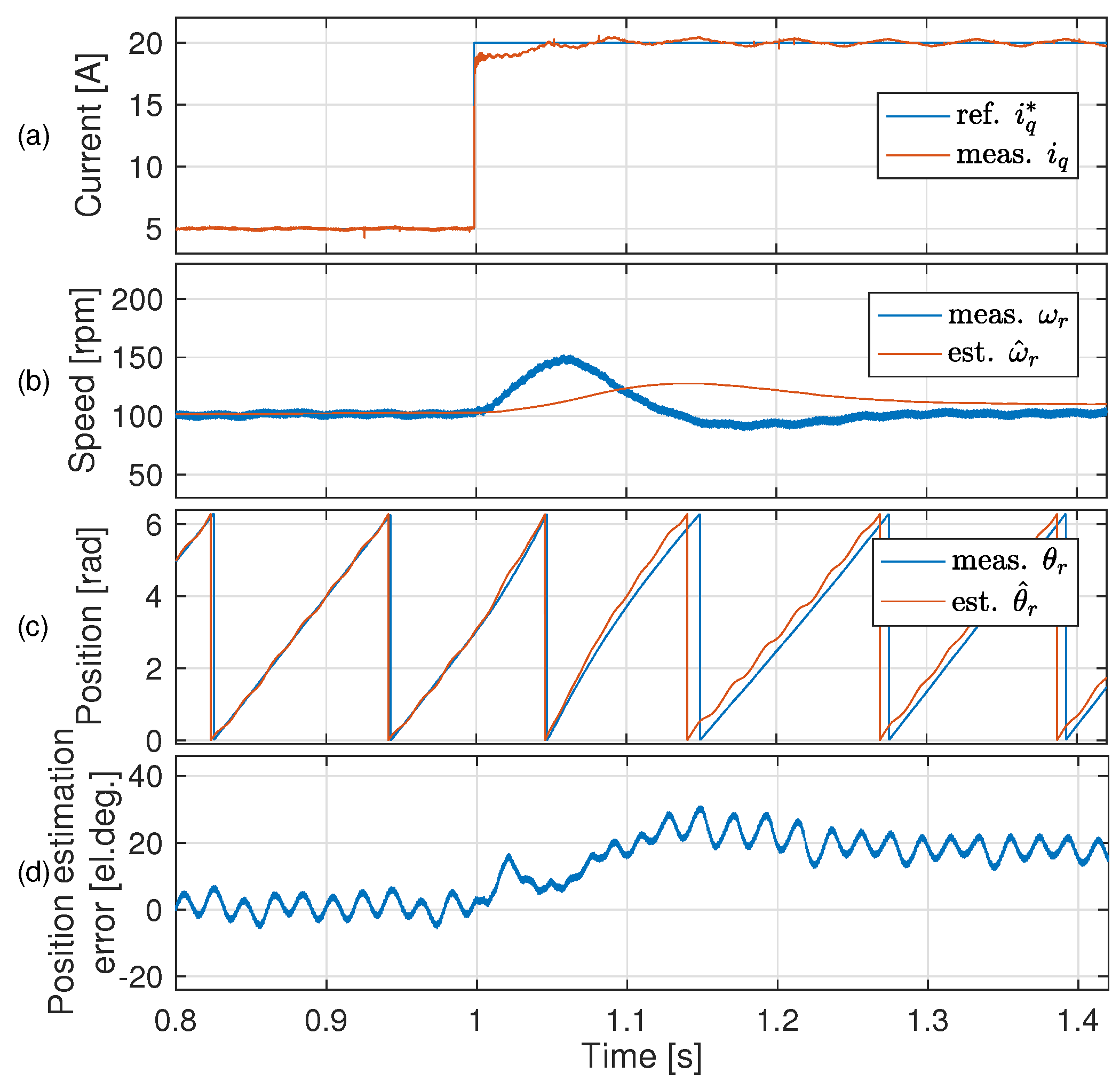
5.2.2. Dynamic Experiments of Sensorless Control Based on SMO Method
5.3. Position Estimation Based on HFI Method for Low-Speed Range
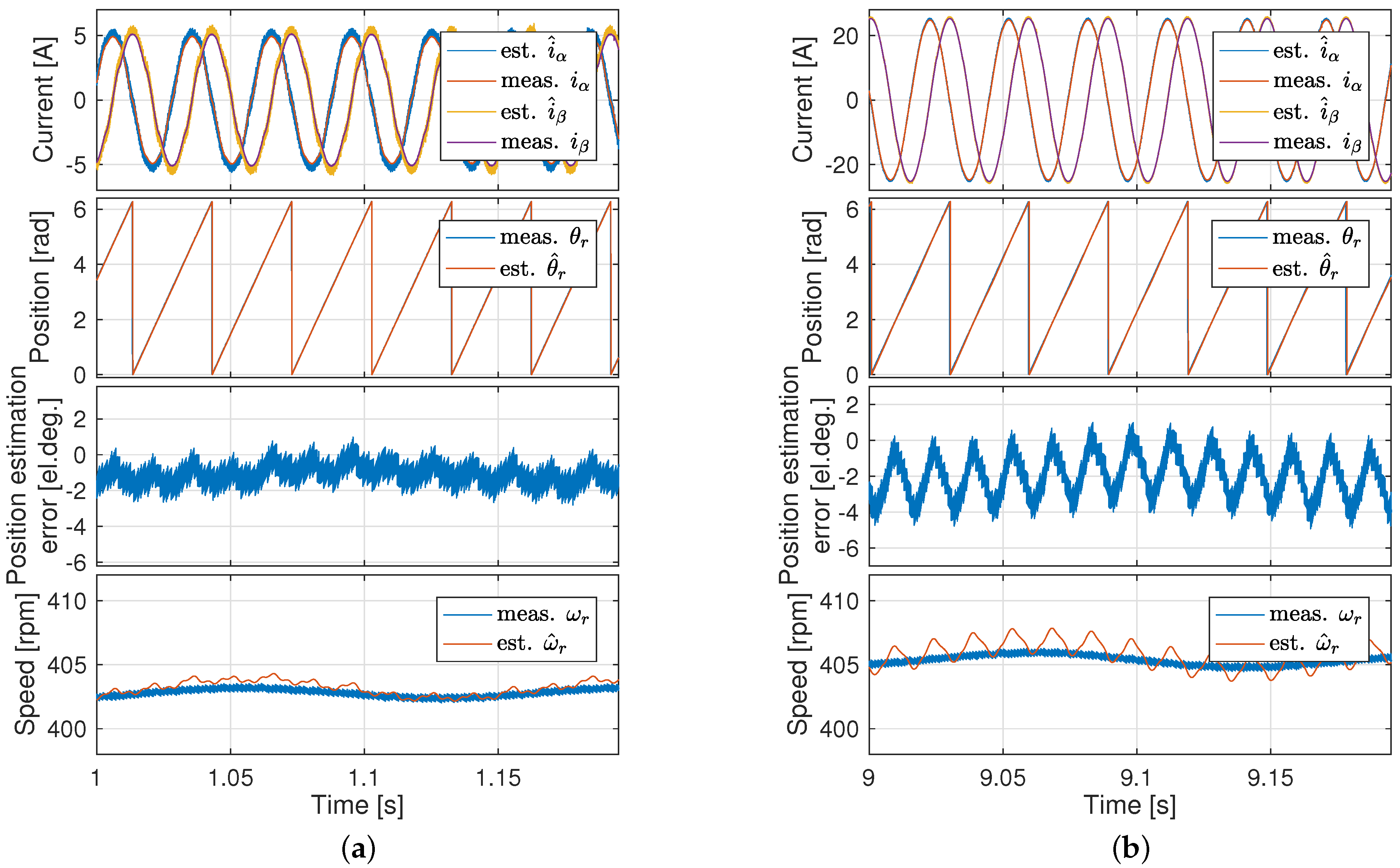
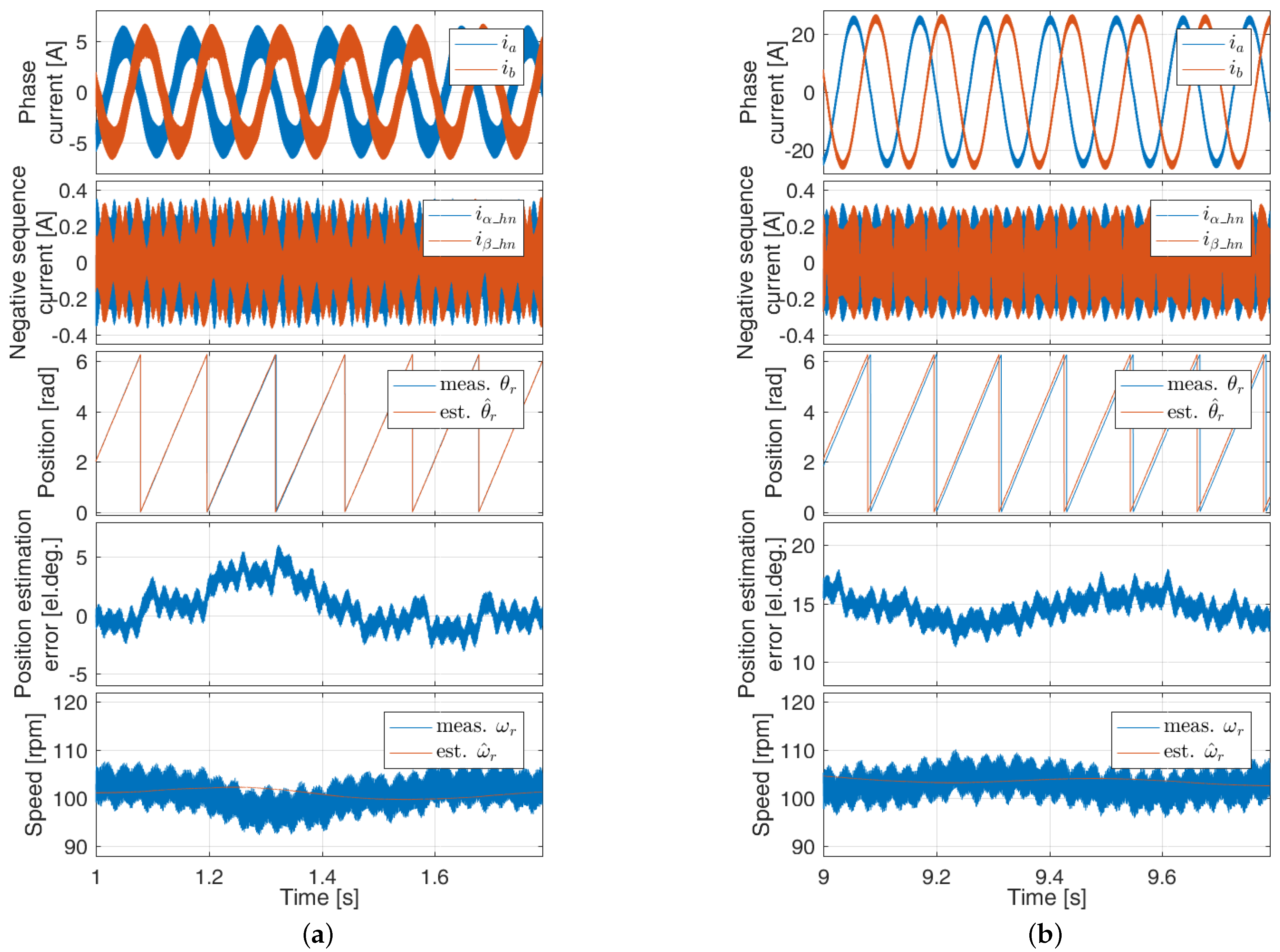
5.3.1. Steady-State Experiments of Sensorless Control Based on HFI Method
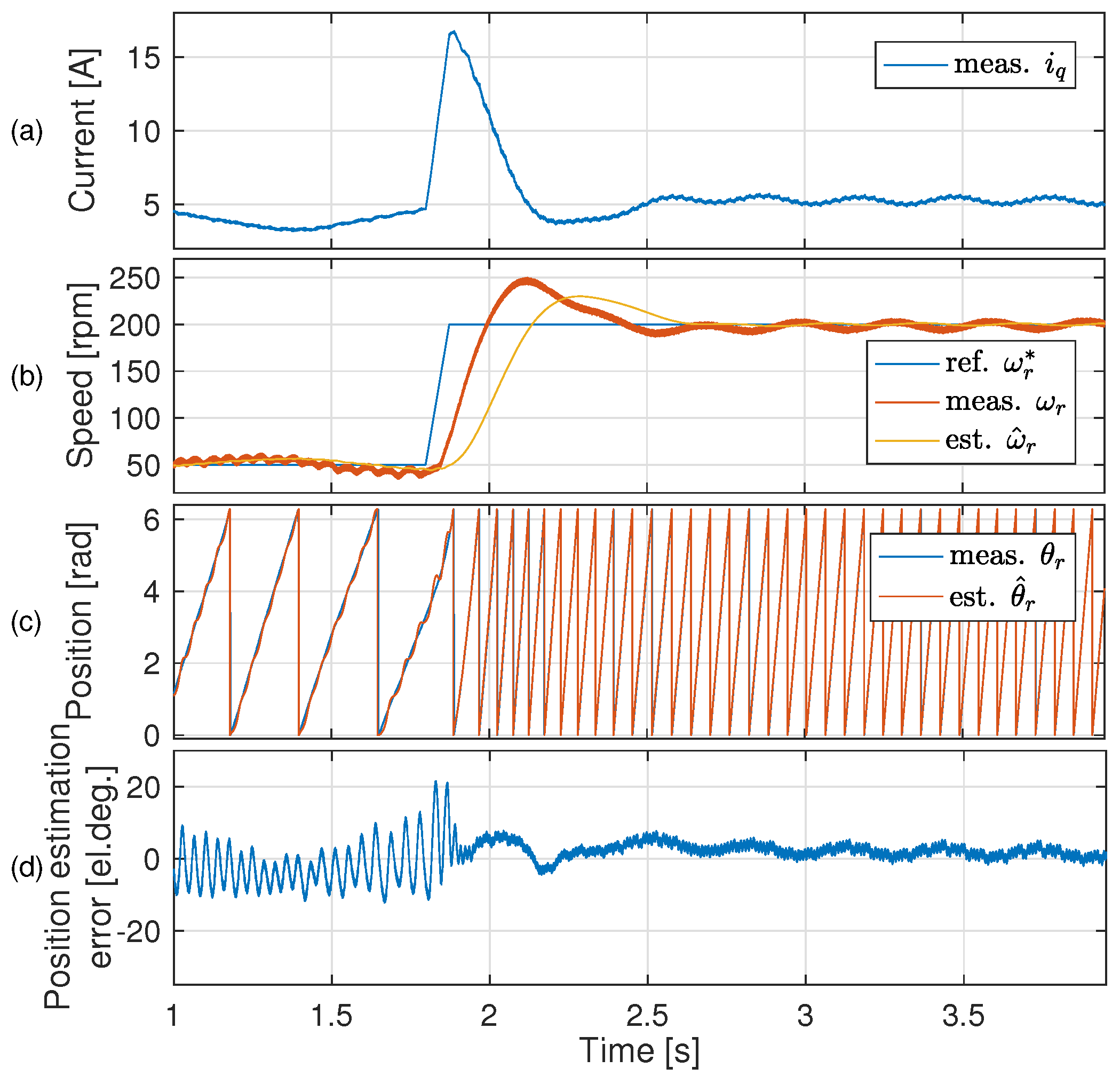
5.3.2. Dynamic Experiments of Sensorless Control Based on HFI Method
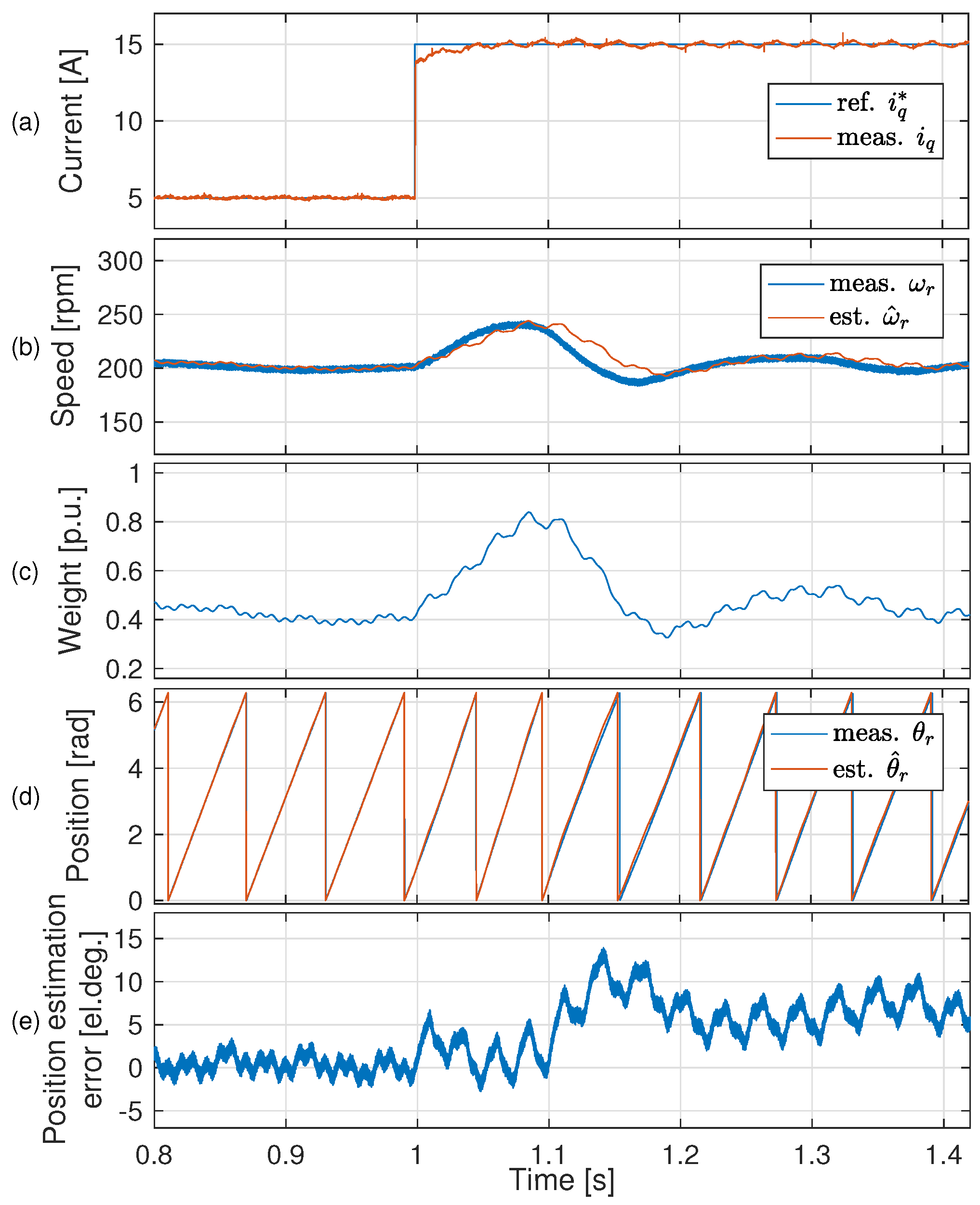
5.4. Transition between High-Speed and Low-Speed Sensorless Control
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, D.; Wang, B.; Zhang, G.; Wang, G.; Yu, Y. A review of sensorless control methods for AC motor drives. CES Trans. Electr. Mach. Syst. 2018, 2, 104–115. [Google Scholar] [CrossRef]
- Wang, G.; Valla, M.; Solsona, J. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Xiao, D.; Nalakath, S.; Filho, S.R.; Fang, G.; Dong, A.; Sun, Y.; Wiseman, J.; Emadi, A. Universal Full-Speed Sensorless Control Scheme for Interior Permanent Magnet Synchronous Motors. IEEE Trans. Power Electron. 2021, 36, 4723–4737. [Google Scholar] [CrossRef]
- Flieh, H.M.; Slininger, T.; Lorenz, R.D.; Totoki, E. Self-Sensing via Flux Injection With Rapid Servo Dynamics Including a Smooth Transition to Back-EMF Tracking Self-Sensing. IEEE Trans. Ind. Appl. 2020, 56, 2673–2684. [Google Scholar] [CrossRef]
- Piippo, A.; Hinkkanen, M.; Luomi, J. Analysis of an Adaptive Observer for Sensorless Control of Interior Permanent Magnet Synchronous Motors. IEEE Trans. Ind. Electron. 2008, 55, 570–576. [Google Scholar] [CrossRef]
- Shi, Y.; Sun, K.; Huang, L.; Li, Y. Online Identification of Permanent Magnet Flux Based on Extended Kalman Filter for IPMSM Drive With Position Sensorless Control. IEEE Trans. Ind. Electron. 2012, 59, 4169–4178. [Google Scholar] [CrossRef]
- Chen, Z.; Tomita, M.; Doki, S.; Okuma, S. An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2003, 50, 288–295. [Google Scholar] [CrossRef]
- Boldea, I.; Paicu, M.C.; Andreescu, G.D. Active Flux Concept for Motion-Sensorless Unified AC Drives. IEEE Trans. Power Electron. 2008, 23, 2612–2618. [Google Scholar] [CrossRef]
- Boldea, I.; Paicu, M.C.; Andreescu, G.D.; Blaabjerg, F. ‘Active Flux’ DTFC-SVM Sensorless Control of IPMSM. IEEE Trans. Energy Convers. 2009, 24, 314–322. [Google Scholar] [CrossRef]
- Foo, G.; Sayeef, S.; Rahman, M.F. Sensorless direct torque and flux control of an IPM synchronous motor drive at low speed and standstill. In Proceedings of the 2008 Australasian Universities Power Engineering Conference, Sydney, NSW, Australia, 14–17 December 2008; pp. 1–7. [Google Scholar]
- Zerdali, E.; Barut, M. The Comparisons of Optimized Extended Kalman Filters for Speed-Sensorless Control of Induction Motors. IEEE Trans. Ind. Electron. 2017, 64, 4340–4351. [Google Scholar] [CrossRef]
- Yin, Z.; Gao, F.; Zhang, Y.; Du, C.; Li, G.; Sun, X. A review of nonlinear Kalman filter appling to sensorless control for AC motor drives. CES Trans. Electr. Mach. Syst. 2019, 3, 351–362. [Google Scholar] [CrossRef]
- Chi, S.; Zhang, Z.; Xu, L. Sliding-Mode Sensorless Control of Direct-Drive PM Synchronous Motors for Washing Machine Applications. IEEE Trans. Ind. Appl. 2009, 45, 582–590. [Google Scholar] [CrossRef]
- Wang, G.; Yang, R.; Xu, D. DSP-Based Control of Sensorless IPMSM Drives for Wide-Speed-Range Operation. IEEE Trans. Ind. Electron. 2013, 60, 720–727. [Google Scholar] [CrossRef]
- Wang, G.; Li, Z.; Zhang, G.; Yu, Y.; Xu, D. Quadrature PLL-Based High-Order Sliding-Mode Observer for IPMSM Sensorless Control With Online MTPA Control Strategy. IEEE Trans. Energy Convers. 2013, 28, 214–224. [Google Scholar] [CrossRef]
- Limsuwan, N.; Kato, T.; Yu, C.Y.; Tamura, J.; Reigosa, D.D.; Akatsu, K.; Lorenz, R.D. Secondary Resistive Losses With High-Frequency Injection-Based Self-Sensing in IPM Machines. IEEE Trans. Ind. Appl. 2013, 49, 1499–1507. [Google Scholar] [CrossRef]
- Gong, L.M.; Zhu, Z.Q. A Novel Method for Compensating Inverter Nonlinearity Effects in Carrier Signal Injection-Based Sensorless Control From Positive-Sequence Carrier Current Distortion. IEEE Trans. Ind. Appl. 2011, 47, 1283–1292. [Google Scholar] [CrossRef]
- Raca, D.; Garcia, P.; Reigosa, D.D.; Briz, F.; Lorenz, R.D. Carrier-Signal Selection for Sensorless Control of PM Synchronous Machines at Zero and Very Low Speeds. IEEE Trans. Ind. Appl. 2010, 46, 167–178. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S.; Jang, J.H.; Sul, S.K. Advantages of Inset PM Machines for Zero-Speed Sensorless Position Detection. IEEE Trans. Ind. Appl. 2008, 44, 1190–1198. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H.; Yang, S.; Ma, M. Improved Initial Rotor Position Estimation for PMSM Drives Based on HF Pulsating Voltage Signal Injection. IEEE Trans. Ind. Electron. 2018, 65, 4702–4713. [Google Scholar] [CrossRef]
- Xu, P.L.; Zhu, Z.Q. Carrier Signal Injection-Based Sensorless Control for Permanent-Magnet Synchronous Machine Drives Considering Machine Parameter Asymmetry. IEEE Trans. Ind. Electron. 2016, 63, 2813–2824. [Google Scholar] [CrossRef]
- Ni, R.; Xu, D.; Blaabjerg, F.; Lu, K.; Wang, G.; Zhang, G. Square-Wave Voltage Injection Algorithm for PMSM Position Sensorless Control With High Robustness to Voltage Errors. IEEE Trans. Power Electron. 2017, 32, 5425–5437. [Google Scholar] [CrossRef]
- Kim, D.; Kwon, Y.C.; Sul, S.K.; Kim, J.H.; Yu, R.S. Suppression of Injection Voltage Disturbance for High-Frequency Square-Wave Injection Sensorless Drive With Regulation of Induced High-Frequency Current Ripple. IEEE Trans. Ind. Appl. 2016, 52, 302–312. [Google Scholar] [CrossRef]
- Hwang, C.E.; Lee, Y.; Sul, S.K. Analysis on Position Estimation Error in Position-Sensorless Operation of IPMSM Using Pulsating Square Wave Signal Injection. IEEE Trans. Ind. Appl. 2019, 55, 458–470. [Google Scholar] [CrossRef]
- Hua, Y.; Sumner, M.; Asher, G.; Gao, Q.; Saleh, K. Improved sensorless control of a permanent magnet machine using fundamental pulse width modulation excitation. IET Electr. Power Appl. 2011, 5, 359–370. [Google Scholar] [CrossRef]
- Raute, R.; Caruana, C.; Staines, C.S.; Cilia, J.; Sumner, M.; Asher, G.M. Analysis and Compensation of Inverter Nonlinearity Effect on a Sensorless PMSM Drive at Very Low and Zero Speed Operation. IEEE Trans. Ind. Electron. 2010, 57, 4065–4074. [Google Scholar] [CrossRef]
- Xie, G.; Lu, K.; Dwivedi, S.K.; Riber, R.J.; Wu, W. Permanent Magnet Flux Online Estimation Based on Zero-Voltage Vector Injection Method. IEEE Trans. Power Electron. 2015, 30, 6506–6509. [Google Scholar] [CrossRef]
- Wang, G.; Kuang, J.; Zhao, N.; Zhang, G.; Xu, D. Rotor Position Estimation of PMSM in Low-Speed Region and Standstill Using Zero-Voltage Vector Injection. IEEE Trans. Power Electron. 2018, 33, 7948–7958. [Google Scholar] [CrossRef]
- Xie, G.; Lu, K.; Dwivedi, S.K.; Rosholm, J.R.; Blaabjerg, F. Minimum-Voltage Vector Injection Method for Sensorless Control of PMSM for Low-Speed Operations. IEEE Trans. Power Electron. 2016, 31, 1785–1794. [Google Scholar] [CrossRef]
- Zhao, C.; Tanaskovic, M.; Percacci, F.; Mariéthoz, S.; Gnos, P. Sensorless Position Estimation for Slotless Surface Mounted Permanent Magnet Synchronous Motors in Full Speed Range. IEEE Trans. Power Electron. 2019, 34, 11566–11579. [Google Scholar] [CrossRef]
- Xie, G.; Lu, K.; Dwivedi, S.K.; Rosholm, J.R. Improved INFORM method by minimizing the inverter nonlinear voltage error effects. In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Turin, Italy, 26–27 March 2015; pp. 188–194. [Google Scholar]
- Ni, R.; Lu, K.; Blaabjerg, F.; Xu, D. A comparative study on pulse sinusoidal high frequency voltage injection and INFORM methods for PMSM position sensorless control. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 2600–2605. [Google Scholar]
- Yang, S.C.; Hsu, Y.L. Full Speed Region Sensorless Drive of Permanent-Magnet Machine Combining Saliency-Based and Back-EMF-Based Drive. IEEE Trans. Ind. Electron. 2017, 64, 1092–1101. [Google Scholar] [CrossRef]
- Illindala, M.; Venkataramanan, G. Frequency/Sequence Selective Filters for Power Quality Improvement in a Microgrid. IEEE Trans. Smart Grid 2012, 3, 2039–2047. [Google Scholar] [CrossRef]
- Briz, F.; Diez, A.; Degner, M.W. Dynamic operation of carrier-signal-injection-based sensorless direct field-oriented AC drives. IEEE Trans. Ind. Appl. 2000, 36, 1360–1368. [Google Scholar] [CrossRef]
- Secrest, C.W.; Ochs, D.S.; Gagas, B.S. Deriving State Block Diagrams That Correctly Model Hand-Code Implementation-Correcting the Enhanced Luenberger Style Motion Observer as an Example. IEEE Trans. Ind. Appl. 2020, 56, 826–836. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated torque (N·m ) | 2 |
| Rated current (Arms)/voltage (Vrms) | 40/13 |
| Number of pole pairs | 5 |
| -axis inductance (mH) | 0.065/0.09 |
| Resistance (m) | 36 |
| PM flux linkage (Vs) | 0.007 |
| Rated speed (rpm) | 2000 |
| Moment of inertia (g) | 1.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Guo, H.; Sun, X.; Wang, Y.; Riaz, S.; Zaman, H. Wide-Speed-Range Sensorless Control of IPMSM. Electronics 2022, 11, 3747. https://doi.org/10.3390/electronics11223747
Yang W, Guo H, Sun X, Wang Y, Riaz S, Zaman H. Wide-Speed-Range Sensorless Control of IPMSM. Electronics. 2022; 11(22):3747. https://doi.org/10.3390/electronics11223747
Chicago/Turabian StyleYang, Weibin, Hao Guo, Xinxin Sun, Yuanlin Wang, Saleem Riaz, and Haider Zaman. 2022. "Wide-Speed-Range Sensorless Control of IPMSM" Electronics 11, no. 22: 3747. https://doi.org/10.3390/electronics11223747
APA StyleYang, W., Guo, H., Sun, X., Wang, Y., Riaz, S., & Zaman, H. (2022). Wide-Speed-Range Sensorless Control of IPMSM. Electronics, 11(22), 3747. https://doi.org/10.3390/electronics11223747