1. Introduction
Adaptation refers to a chain of steps needed by the filter to adjust its parameters (coefficients) in accordance with the input data so that its characteristics are optimized [
1]. Adaptive equalizers create a subgroup of adaptive filters. The area of adaptive equalization has found wide usage in all forms of communication systems. In a communication system transmitting over a wireless channel, the adaptive equalizer is applied to compensate for the harmful effects of multipath transmission on the received signal quality [
2]. Adaptation or learning algorithm is one of the characteristics that define the adaptive equalizer, i.e., it specifies how the coefficients are adjusted from one time instant to the next. RLS exemplifies one of the well-known adaptation algorithms used to tune adaptive equalizer coefficients. RLS algorithm possesses a fast convergence rate, which is measured by the number of adaptation cycles (iterations) necessary to accomplish a solution exhibiting satisfactorily low mean square error (MSE). A disadvantage of RLS is high computational complexity [
3].
A couple of years ago, evolutionary algorithms, such as the GA, gained researchers’ attention as an optimization framework in the field of wireless communication systems [
4,
5]. Giving consideration to equalization, Humaidi et al. [
6] introduced an integrated learning algorithm by hybridizing the standard Least Mean Square (LMS) with the GA; the algorithm is capable of tuning both Finite Impulse Response (FIR) and Infinite Impulse Response (IIR) filters. The GA-based equalizer for a wireless communication system that incorporates direct sequence ultra-wideband (DS-UWB) signal spreading has been considered in [
7]. In [
8], GA was used to estimate the coefficients of high-order IIR filters by applying a time-frequency fitness function. Chen et al. [
9] combined a so-called micro-GA (i.e., a version of GA with small population size assumed) with the Viterbi algorithm. As a result, data estimation is conducted jointly with channel estimation. However, the method does not allow channel tracking; it seems clear that the channel equalizer from [
9] would require periodical injections of training sequences for re-tuning.
Undoubtedly, the GA has been known for years, but that does not dismiss this method. On the contrary, we believe it is still worth being developed and improved. The GA employs a population search strategy and utilizes probabilistic transition rules. The search directions are controlled by the objective function and corresponding fitness levels. Therefore, the GA is quite good at navigating through broad search spaces and can quickly reach the globally optimal solution to the optimization problem [
10].
The UCGA, considered herein, has been introduced in [
11] as an adaptation engine for linear channel equalizers. In the cited work, the GA considers just one generation per one signaling interval, which seems to be enough for efficient channel tracking—a key feature of the systems transmitting over nonstationary radio channels. Accordingly, the optimal settings of the equalizer’s taps continue on changing in the sequel of the change of channel conditions.
The UCGA computational cost is significantly smaller than that of the regular GA. (The original GA must process hundreds of generations per one signaling interval before it can output a vector containing the optimal equalizer coefficients).
From [
11], it can be concluded that in the performance contest between the popular LMS-based equalizer and the considered UCGA-based equalizer, the latter is an undisputed winner. In the current research, we consider RLS as the reference equalizer algorithm instead of LMS. Additionally, we explore an alternative method of the UCGA initialization and check if the single-1 initialization, introduced hereinafter, can add any gain to the system performance.
The remaining part of the paper is organized as follows: In
Section 2, the system model and the tools, used in the current research, are introduced.
Section 3 describes the UCGA details. The simulation experiment assumptions are specified, and the results are displayed in
Section 4.
Section 5 discusses the results. Finally, a brief conclusion is drawn in
Section 6.
The following notation convention is used throughout the paper: regular lowercase or uppercase letters represent scalars. Vectors are represented by lowercase bold letters, such as . If a vector is time-dependant, the respective signaling interval is specified in a bracket, i.e., . represents a set of real numbers. and stand for the real- and imaginary part of a complex scalar, respectively, means the modulus of a complex scalar, and returns the largest integer less than or equal to a real argument.
2. Materials and Methods
The performance of the UCGA is evaluated by means of a computer-based simulation experiment. The software used during the study is the GA solver, which is the part of MATLAB packet. The researcher’s role is to input the parameters, constraints and, crucially, to properly specify the objective function.
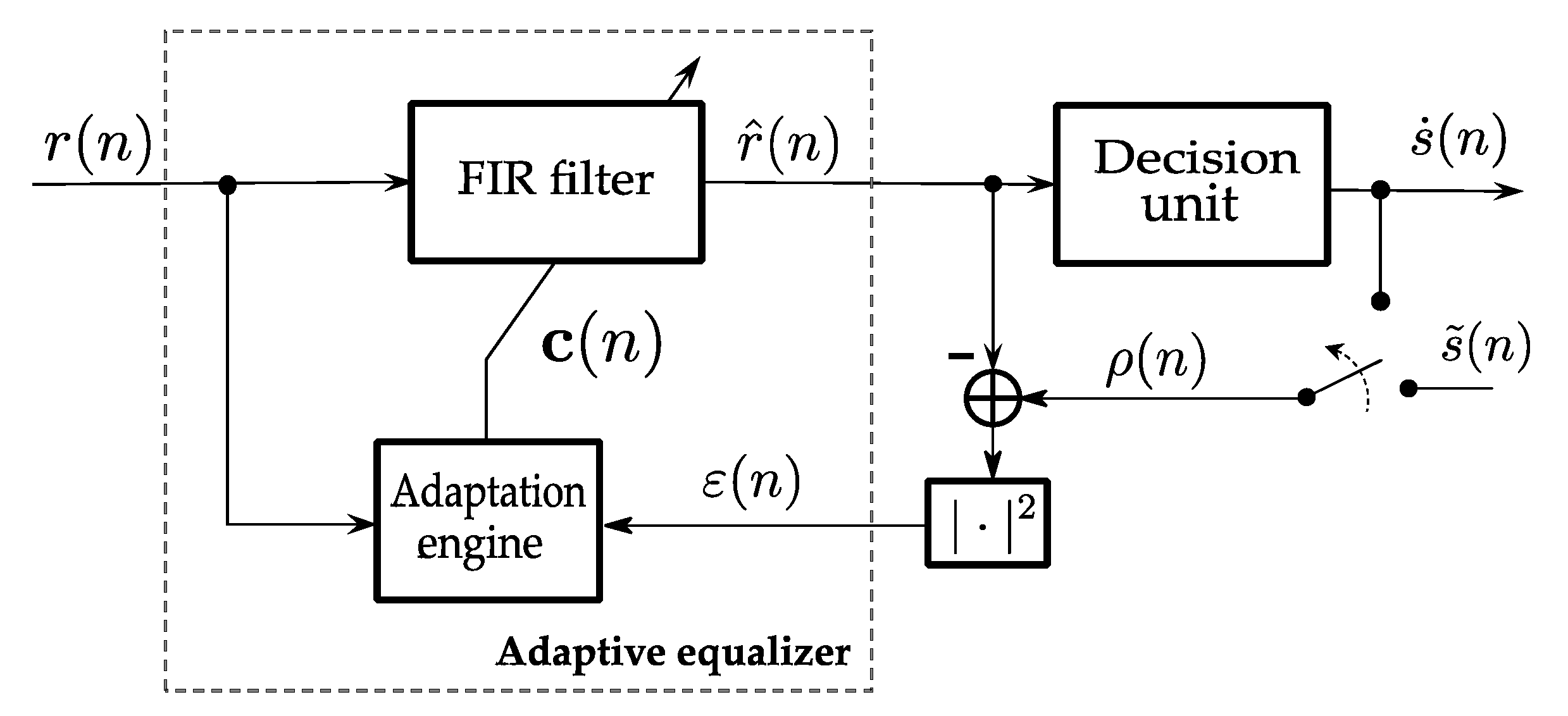
To understand the GA solver configuration in the considered optimization problem, we focus on the system model illustrated by the block diagram from
Figure 1. The designed equalizer acquires the samples of Binary Phase-Shift Keying (BPSK) modulated signal, transmitted over a time-varying Rayleigh fading channel. The resulting channel output
r is processed by a transversal filter, i.e., adaptive linear equalizer, responsible for providing estimates of the transmitted symbols,
. In detail, the estimate of the
nth symbol of a data frame is defined as
where
L is the equalizer length, and the complex-valued numbers
, i.e., the elements of vector
from
Figure 1, represent the tap coefficients of the equalizer in respective signaling interval.
The adaptation is carried out by observing the error, i.e., the difference between the desired sequence and the equalizer output. The error volume controls the direction of the coefficients adjustment from one iteration to the next in order to approach the optimum set of values. The optimization procedure that the adaptive algorithm utilizes to update the coefficient values is based on the Mean Square Error criterion [
12]; thus, the error signal is defined as
During a training phase, a training sequence is transmitted. The sequence is known in advance at the receiver side (), so that the signal received in the training phase can be taken as a reference. The optimization criterion for the adaptive equalizer is to minimize the error (2) according to the MSE criterion. In other words, in the nth signaling interval the equalizer looks for the best vector of filter taps.
Having completed the training phase, the adaptive equalizer starts operating on the basis of decision-directed rule. The signal outputted by the filter is regenerated by a decision unit, so that it becomes an ideal BPSK symbol, i.e.,
Thanks to the reference samples received from the decision unit, the adaptive equalizer can track the statistical variations of the channel without wasting the bandwidth for passing any midamble through the channel. However, it might fail if the decision is made in favour of a BPSK symbol opposite to the actually transmitted symbol.
3. Uni-Cycle Genetic Algorithm
The genetic Algorithm is an iterative technique that simulates the natural evolution process by applying the methods of selection, crossover, and mutation of the “genetic material” according to some probabilistic rules [
13]. The “genetic material” (called chromosome) represents the details of the given optimization problem solution, called individual. Several individuals co-exist and constitute a population.
The conventional genetic algorithm has been designed to solve optimization problems that do not evolve over time [
14,
15]. By the application of various GA operators, the structure of the population continuously evolves (the individuals whose chromosomes exhibit the poorest fitness die, the newborns constitute a new generation; there are also some random mutations applied to the chromosomes to apply some minor random changes). By creating a new generation, the algorithm takes a single step on its path towards the optimal (fixed) solution.
In the case of channel equalizer task, the role of the equalizer is to continuously track the current channel state, so there is no one fixed optimization goal. Conceptually, it is possible to consider several GA generations in order to pursue a solution (the channel taps or, equivalently, the decision on one transmitted symbol) that is optimal for a single signaling interval, and then start from scratch to consider the next signaling interval. Such a solution would be similar to the one presented in [
9], (The reference solution from [
9] is even more difficult, as it incorporates the decoder, additionally.).
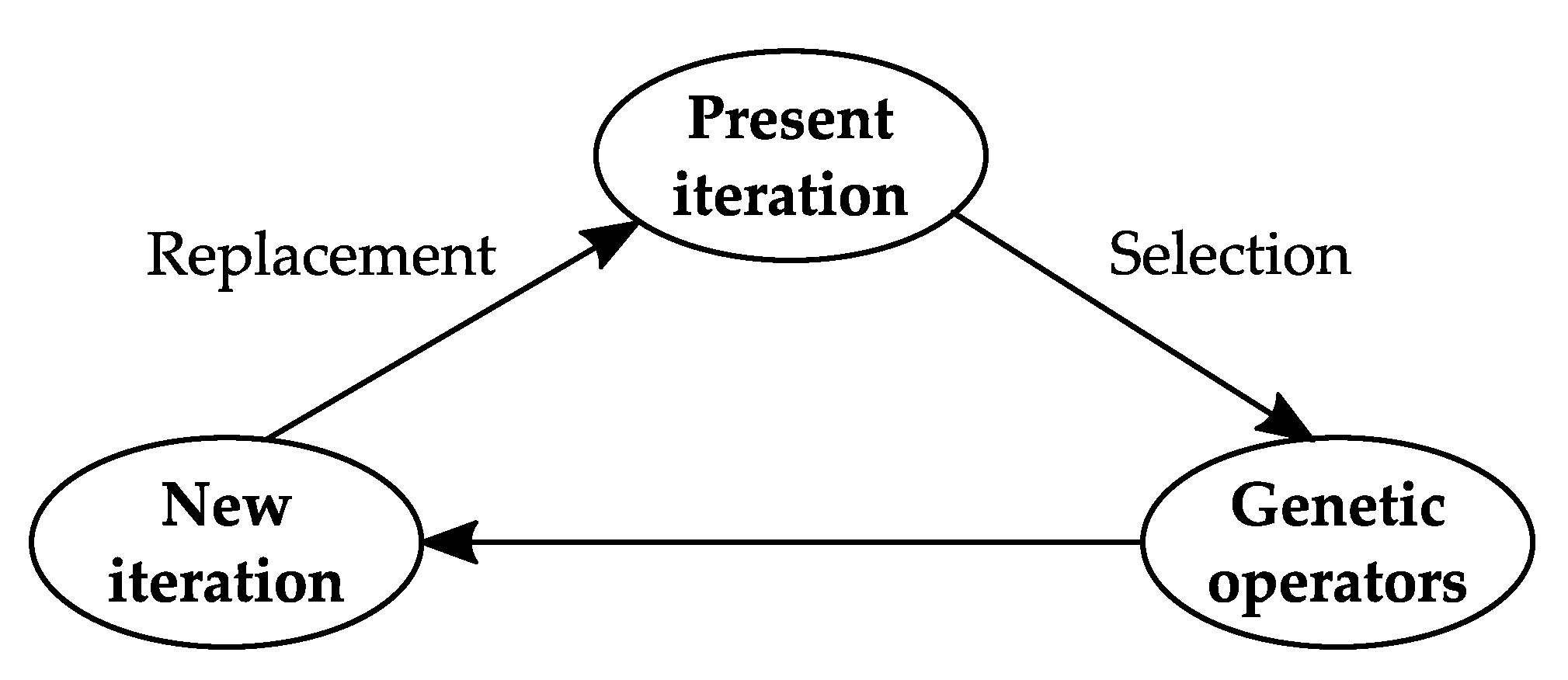
According to the proposed UCGA strategy, only one generation per one signaling interval is assumed to limit the computational payload. The resultant population from one signaling interval is considered the initial population for the next UCGA instance, related to the next signaling interval, and so on, as shown in
Figure 2.
As the channel evolution is rather slow, it can be considered as if the global optimum were fixed over a few subsequent signaling intervals which allows for the UCGA convergence. Obviously, the algorithm cannot find the exact optimum, which is slinking, but a rough estimation of the channel coefficients is generally sufficient to compensate for the channel effect efficiently. The cycle of the UCGA operations gives the chance to adapt the current set of suggested solutions to evolving channel state.
The implementation details of the UCGA are as follows.
The chromosomes have the meaning of the equalizer coefficients to be optimized. They are represented by vectors containing real numbers. The data type used during the experiment is floating-point [
14]. (It is noteworthy that in general one individual may comprise more than one chromosome; in the current system, the individual is determined by exactly one chromosome). In detail, the chromosome represents both real and imaginary parts of the candidate coefficients:
where
define the candidate coefficient
of the
th equalizer tap (or more precisely, its real and imaginary part, respectively).
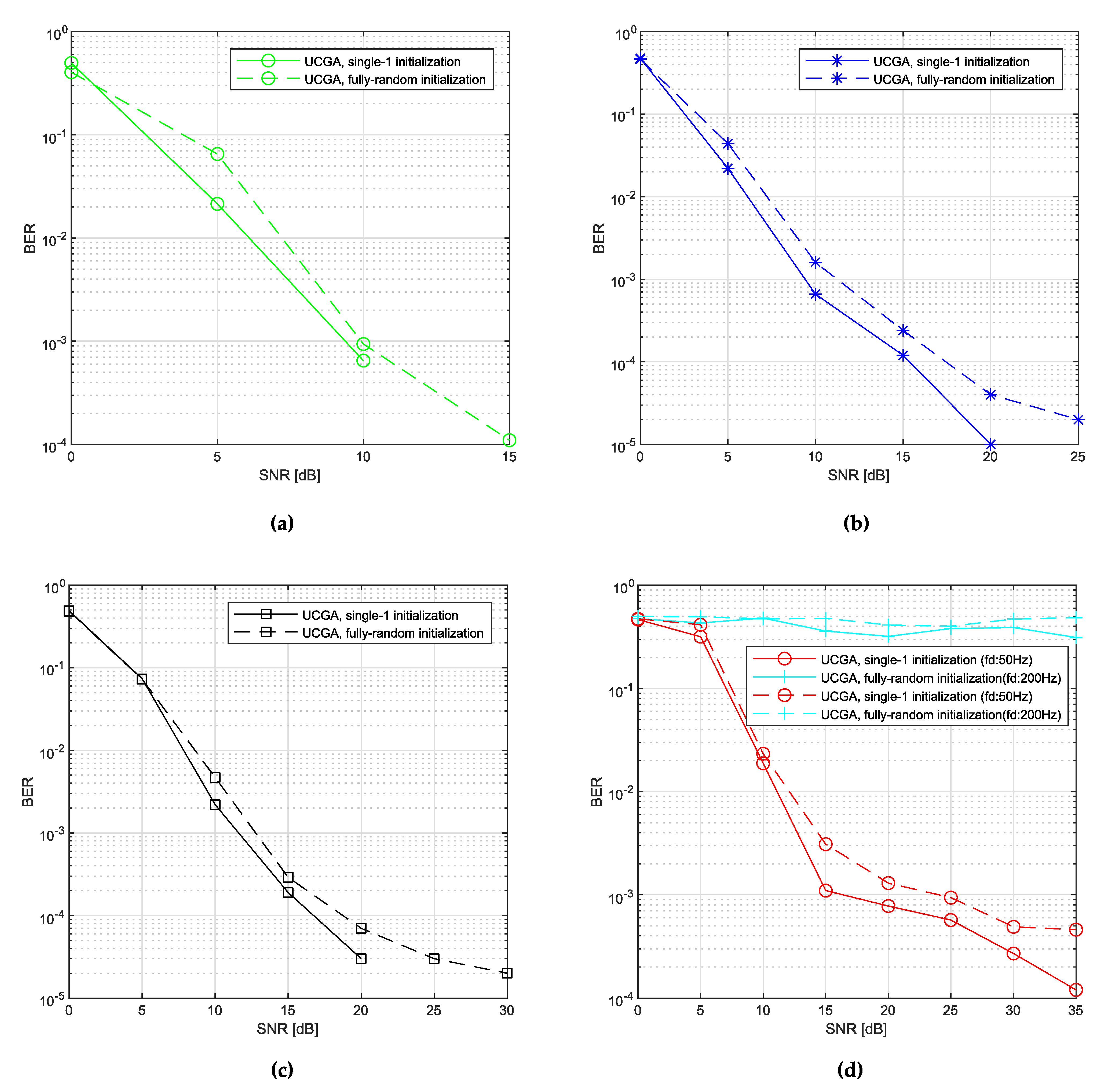
The UCGA initialization is executed in the 1st signaling interval. Two strategies are considered. According to the first approach, all the chromosomes are generated randomly; the values of either real or imaginary parts are constrained to the range from −1 to 1. The second strategy assumes random generation of all chromosomes (as above) with the exception for the first individual, for which , and . Such settings would be ideal for a single-path transmission, but we expect it to boost the GA convergence even in the case of multipath Rayleigh fading channel.
The equalizer starts to adjust the equalizer taps immediately after receiving the first sample from the channel. It is the typical approach for the initialization of adaptive channel equalizers.
In every
nth iteration (signaling interval), the UCGA population,
, consists of
individuals. As mentioned in
Section 2, the optimization criterion for the proposed scheme assumes minimization of the mean-square value of the error signal, given by Equation (2) (the MSE criterion). Thus, to evaluate the fitness of a given individual (represented by chromosome
) in iteration
, we use the following cost function:
where
. Let us denote the chromosome exhibiting the best fitness in iteration
n as
In every
nth iteration, the UCGA searches for the minimum estimation error
across the entire population
to obtain a reference fitness value for comparisons between individual chromosomes; starting from the 2nd iteration, the worst chromosomes are replaced with newborns, being the result of genetic operations like selection, crossover, and mutation.
In the current work, selection routine utilizes a method called roulette wheel, i.e., the probability that a given individual becomes a parent is proportional to its fitness [
14]. Accordingly, the selection probability in the
nth iteration for an individual with chromosome
can be defined as
To avoid the loss of the best genetic material, the elite strategy [
15] is employed. It means that some high-ranked individuals (in terms of the fitness value) co-exist with the offspring generation. The number of such elite individuals is called an elite count.
The intermediate crossover is employed for the UCGA model to merge genes from two parents’ chromosomes in the current iteration and produce a new child.
The mutation operation consists of adding a random complex zero-mean Gaussian number
to the chromosome value. The standard deviation of
has been set to an appropriate value, specified in
Table 1, after some preliminary experiments.
Thanks to the mutation, which brings some random changes to the chromosomes, the UCGA is unlikely to stick at one of the local optima. Neither elite individuals nor crossover children undergo mutation procedure.
5. Discussion
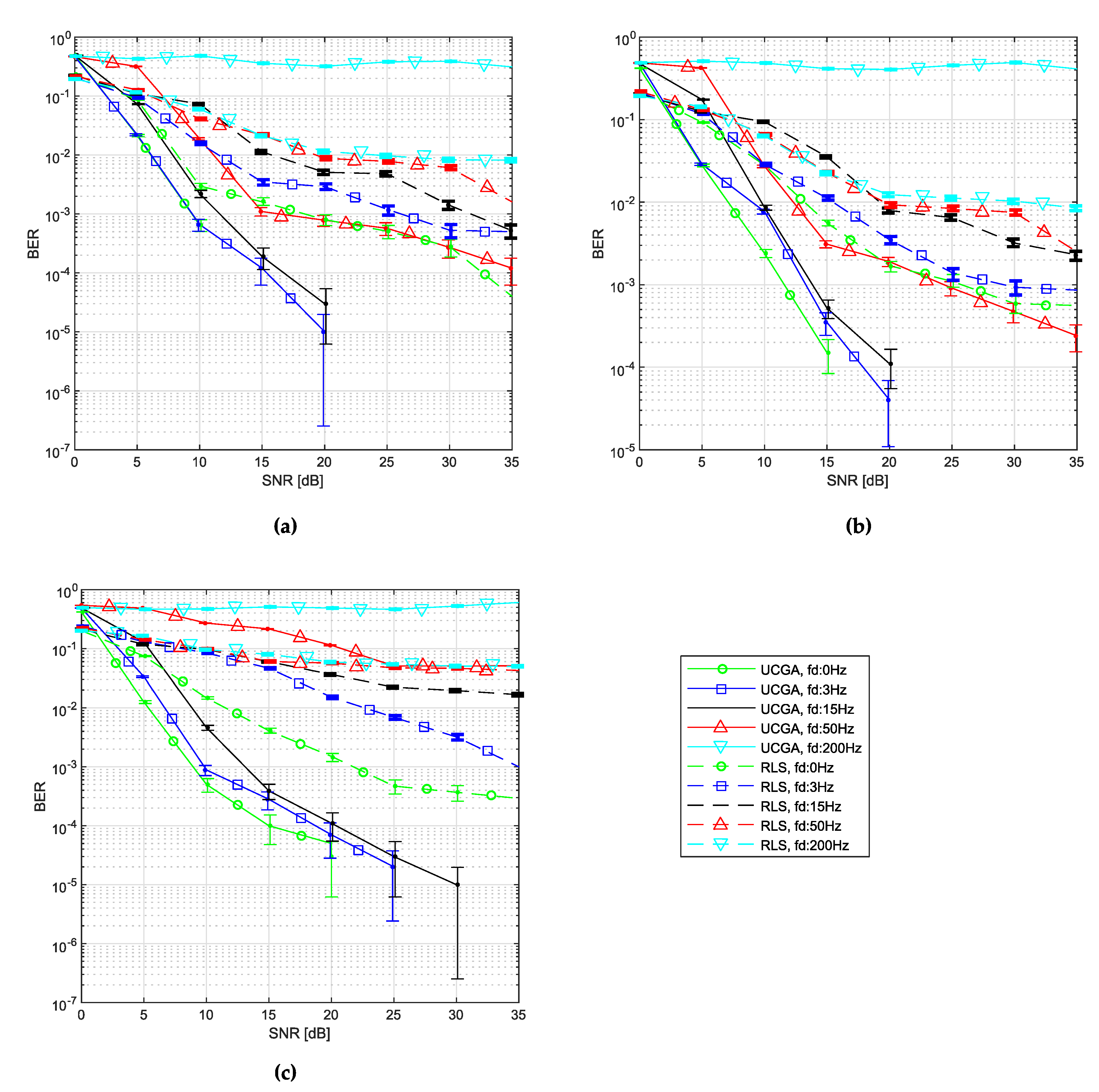
In general, for all channel models and most Doppler shifts the UCGA-AE (solid lines in
Figure 3) is superior to the RLS-AE (dashed lines). A particularly high SNR gain (as much as 17 dB) can be observed at
BER level in the case of either 6-tap or 12-tap urban channel models, if one assumes
3 Hz (refer to
Figure 3a,b; note the overlapping curves for UCGA,
Hz and UCGA,
3 Hz). Equally remarkable is that in the case of 6-tap hilly-terrain channel (
Figure 3c) RLS-AE curves decline much slower with increasing SNR, in comparison with respective UCGA-AE curves. A weak point of the UCGA-AE is its performance in the case of
Moreover, the efficiency of the proposed UCGA-AE is not satisfactory if the transmission runs over the hilly-terrain 6-tap channel exhibiting 50 Hz Doppler shift.
From
Figure 4, it can be seen that the single-1 initialization brings some gain over fully random initialization, i.e., the UCGA-AE is capable of achieving a given BER level at a reasonably lower SNR.
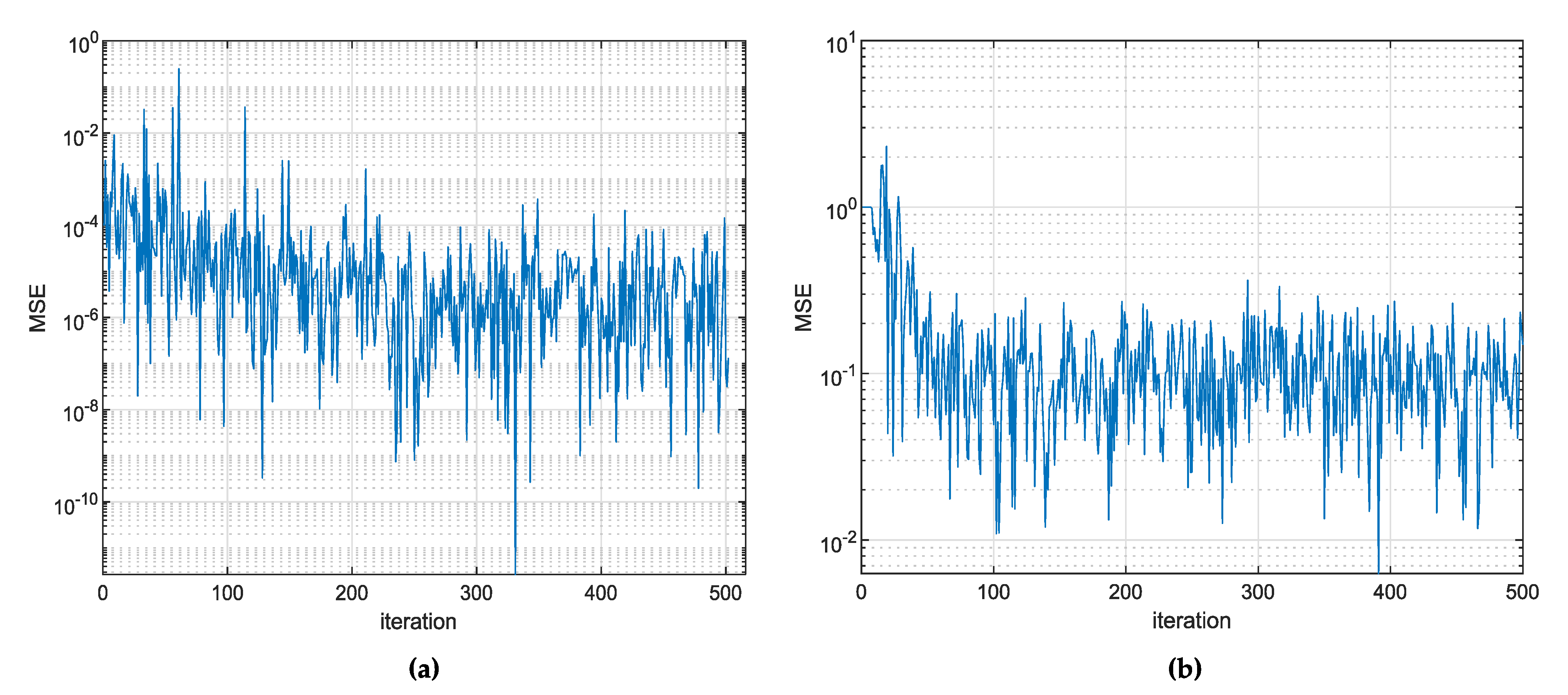
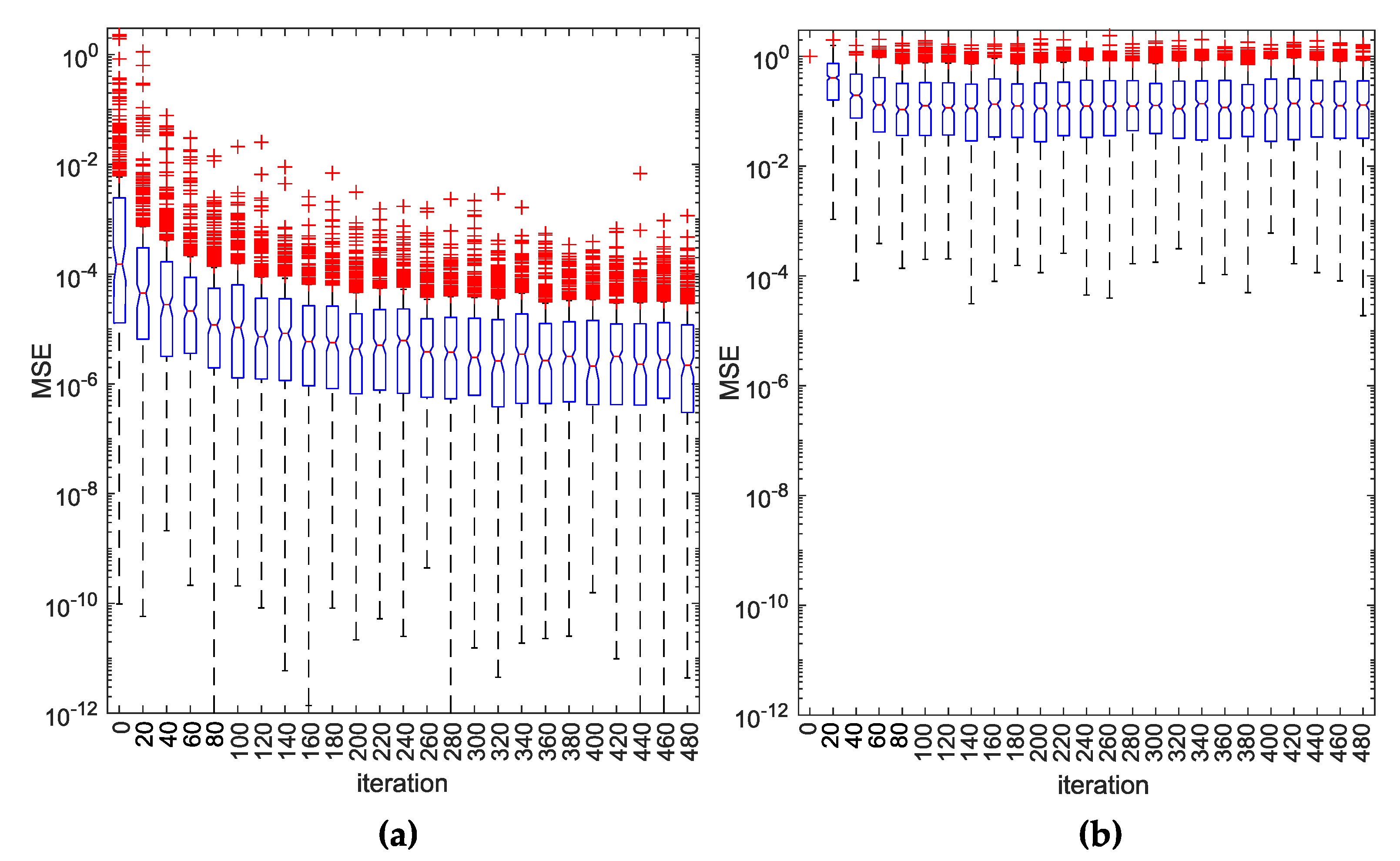
Regarding the convergence characteristics (refer to
Figure 5 for single run results and to
Figure 6 for full MSE statistics), it must be pointed out that in the considered case UCGA converges faster than RLS as its starting point of the MSE vs. iteration curve is placed significantly lower (ca.
in comparison with
for RLS). The average steady-state MSE exhibited by UCGA (ca.
) is unattainable for the RLS (ca.
).
The idea of considering just one generation per signaling interval has a crucial influence on the algorithm computational complexity. This approach makes the cost of the learning part linearly proportional to the population size. Regarding the filtering part, in order to calculate according to Equation (1), given filter taps, the system requires L multiplications and L − 1 additions.
6. Conclusions
The genetic algorithm is a powerful tool for solving numerous optimization problems. The UCGA technique presents the possibility of tracking the channel evolution, which has been verified in a number of simulation experiments, reported in the paper. In the majority of the considered simulation setups, the UCGA-AE remarkably outperforms the reference RLS-AE. As a consequence, the UCGA can be considered a robust channel equalizer engine for the future wireless systems, including 6G telecommunications.
As for any problem solved by means of the GA, it is crucial to properly set the solver parameters and initialize the population. It has been verified experimentally that the single-1 initialization gives faster UCGA convergence than the random assignment of initial values to all chromosomes.
As a future research task, higher-order modulations, such as QPSK, 16-QAM, 64-QAM, etc., could be taken into account. Another item of particular interest is the chromosome representation—fixed point representation would be welcome as the fixed-point arithmetic can be easily implemented on popular logic structures, such as Field-Programmable Gate Arrays (FPGA), or tiny microprocessors, in contrary to floating-point operations.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}