
Position Design for Reconfigurable Intelligent-Surface-Aided Indoor Visible Light Communication Systems


Abstract
:1. Introduction
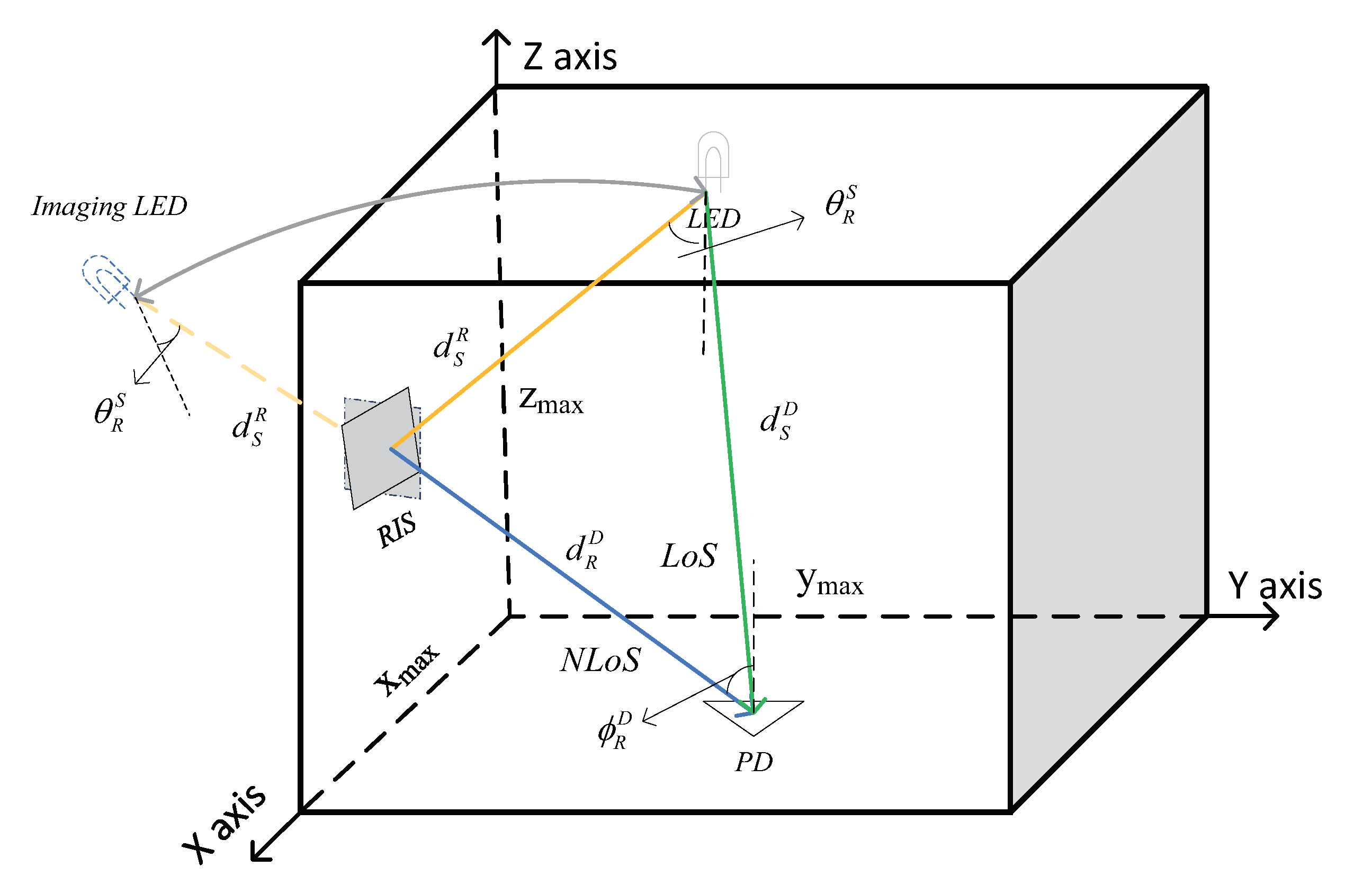
- For the scenario that contained an AP, a user, and an RIS, we found the optimal position of the RIS after fixing the locations of the AP and user. This situation is suitable for offices with a fixed office location and LEDs. In this situation, the device generally does not move after determining the position.
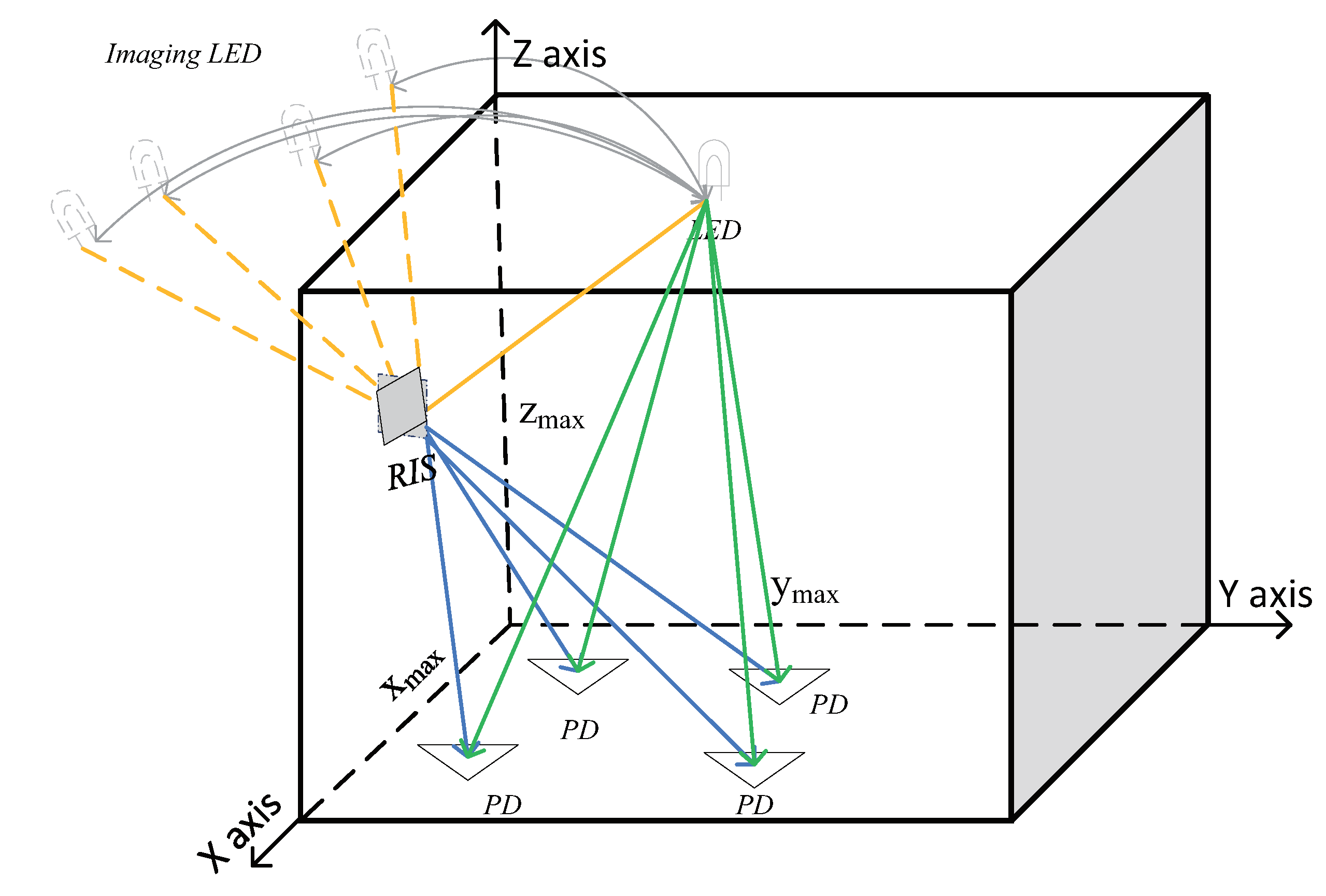
- For the scenario with a fixed AP, a mobile user, and an RIS, we found the optimal position of the RIS to satisfy the sum of achievable rates in each position of the floor maximization. We needed to meet the limit of quality of service (QoS) for every position on the floor. Even in the traditional dead zone, we guaranteed the QoS compared with the VLC systems without RIS. This situation is suitable for offices with mobile devices and a transmitter. This is common in our daily lives.
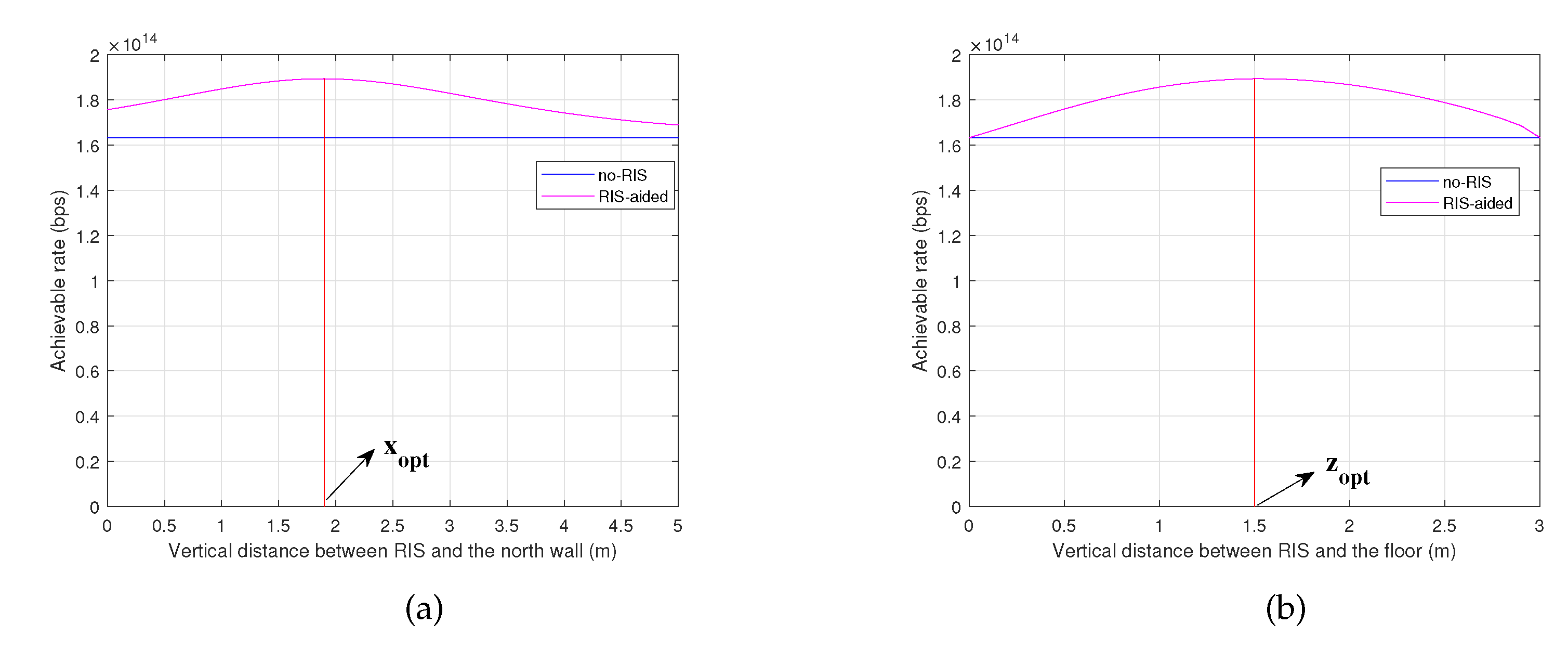
- The simulation results showed that the communication performance can be improved to a greater degree through proper position design of the RIS (compared with the performance of a randomly placed RIS). The computational complexity to solve the position optimization problems through the PSO algorithm proposed in this paper can be significantly reduced compared with that of the exhaustive search method. We observed that the PSO algorithm is an efficient method to solve the problems described in this paper.
2. System Model
3. Problem Formulation
3.1. Problem Formulation for Scenario 1
3.2. Problem Formulation for Scenario 2
4. Problem Solution
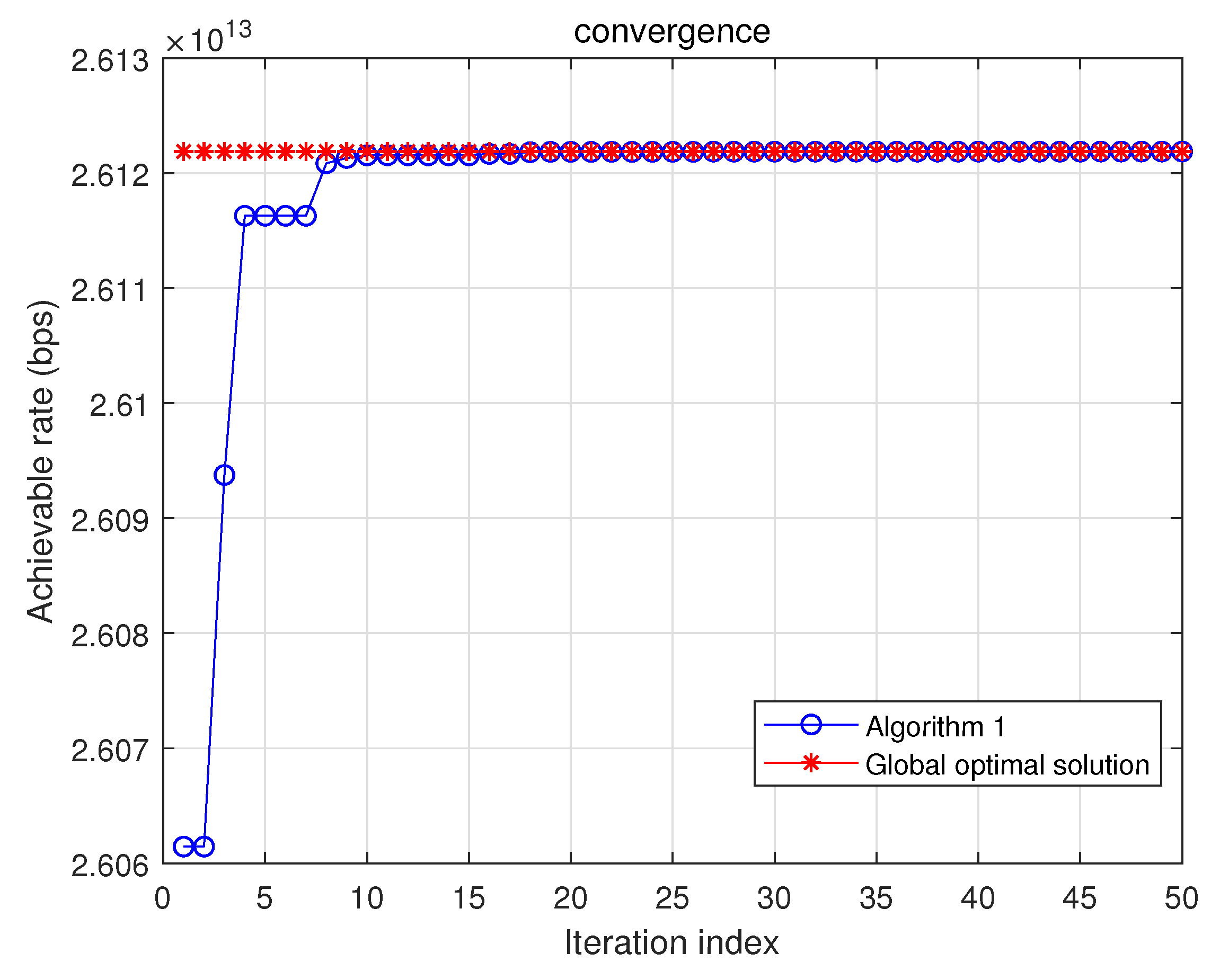
4.1. PSO Algorithm
| Algorithm 1 The PSO Algorithm |
| Input: Swarm size m; maximum iterations ; speed and position constraints ; objective function f; weight coefficient ; Output: The swarm’s historically optimum position ; the optimal value ;
|
4.2. Complexity Analysis
5. Simulation Results
5.1. Simulation Parameters
5.2. Numerical Results
5.2.1. Convergence Analysis
5.2.2. Performance Gain of the Optimal Location of RIS versus Randomly Placed RIS for Scenario 1
5.2.3. Achievable Rate Performance versus Different for Scenario 2
6. Conclusions and Future Research Directions
Author Contributions
Funding
Conflicts of Interest
References
- Obeed, M.; Salhab, A.M.; Alouini, M.S.; Zummo, S.A. On optimizing VLC networks for downlink multi-user transmission: A survey. IEEE Commun. Surv. Tutor. 2019, 21, 2947–2976. [Google Scholar] [CrossRef]
- Chaaban, A.; Rezki, Z.; Alouini, M.S. On the capacity of intensity-modulation direct-detection Gaussian optical wireless communication channels: A tutorial. IEEE Commun. Surv. Tutor. 2021, 24, 455–491. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED based indoor visible light communications: State of the art. IEEE Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar] [CrossRef]
- Almadani, Y.; Plets, D.; Bastiaens, S.; Joseph, W.; Ijaz, M.; Ghassemlooy, Z.; Rajbhandari, S. Visible light communications for industrial applications—Challenges and potentials. Electronics 2020, 9, 2157. [Google Scholar] [CrossRef]
- ElMossallamy, M.A.; Zhang, H.; Song, L.; Seddik, K.G.; Han, Z.; Li, G.Y. Reconfigurable intelligent surfaces for wireless communications: Principles, challenges, and opportunities. IEEE Trans. Cogn. Commun. Netw. 2020, 6, 990–1002. [Google Scholar] [CrossRef]
- Renzo, M.D.; Debbah, M.; Phan-Huy, D.T.; Zappone, A.; Alouini, M.S.; Yuen, C.; Sciancalepore, V.; Alexandropoulos, G.C.; Hoydis, J.; Gacanin, H.; et al. Smart radio environments empowered by reconfigurable AI meta-surfaces: An idea whose time has come. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 129. [Google Scholar] [CrossRef]
- Yang, F.; Rahmat-Samii, Y. Surface Electromagnetics: With Applications in Antenna, Microwave, and Optical Engineering; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Oliveri, G.; Rocca, P.; Salucci, M.; Erricolo, D.; Massa, A. Multi-Scale Single-Bit RP-EMS Synthesis for Advanced Propagation Manipulation through System-by-Design. arXiv 2022, arXiv:2203.04399. [Google Scholar] [CrossRef]
- Di Renzo, M.; Ntontin, K.; Song, J.; Danufane, F.H.; Qian, X.; Lazarakis, F.; De Rosny, J.; Phan-Huy, D.T.; Simeone, O.; Zhang, R.; et al. Reconfigurable intelligent surfaces vs. relaying: Differences, similarities, and performance comparison. IEEE Open J. Commun. Soc. 2020, 1, 798–807. [Google Scholar] [CrossRef]
- Hodge, J.A.; Mishra, K.V.; Zaghloul, A.I. Intelligent time-varying metasurface transceiver for index modulation in 6G wireless networks. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 1891–1895. [Google Scholar] [CrossRef]
- Aboagye, S.; Ngatched, T.M.; Dobre, O.A.; Ndjiongue, A.R. Intelligent reflecting surface-aided indoor visible light communication systems. IEEE Commun. Lett. 2021, 25, 3913–3917. [Google Scholar] [CrossRef]
- Cao, B.; Chen, M.; Yang, Z.; Zhang, M.; Zhao, J.; Chen, M. Reflecting the light: Energy efficient visible light communication with reconfigurable intelligent surface. In Proceedings of the 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 18 November–16 December 2020; pp. 1–5. [Google Scholar]
- Qian, L.; Chi, X.; Zhao, L.; Chaaban, A. Secure visible light communications via intelligent reflecting surfaces. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Sun, S.; Yang, F.; Song, J.; Han, Z. Optimization on Multi-User Physical Layer Security of Intelligent Reflecting Surface-Aided VLC. arXiv 2022, arXiv:2201.00705. [Google Scholar]
- Wu, Q.; Zhang, J.; Guo, J. Capacity Maximization for Reconfigurable Intelligent Surface-Aided MISO Visible Light Communications. Photonics 2022, 9, 487. [Google Scholar] [CrossRef]
- Sun, S.; Yang, F.; Song, J. Sum rate maximization for intelligent reflecting surface-aided visible light communications. IEEE Commun. Lett. 2021, 25, 3619–3623. [Google Scholar] [CrossRef]
- Sun, S.; Yang, F.; Song, J.; Han, Z. Joint resource management for intelligent reflecting surface–aided visible light communications. IEEE Trans. Wirel. Commun. 2022, 21, 6508–6522. [Google Scholar] [CrossRef]
- Han, Y.; Xiao, Y.; Zhang, X.; Gao, Y.; Zhu, Q.; Dong, B. Design of dynamic active-passive beamforming for reconfigurable intelligent surfaces assisted hybrid VLC/RF communications. IET Commun. 2022, 16, 1531–1544. [Google Scholar] [CrossRef]
- Sun, S.; Yang, F.; Song, J.; Zhang, R. Intelligent Reflecting Surface for MIMO VLC: Joint Design of Surface Configuration and Transceiver Signal Processing. arXiv 2022, arXiv:2206.14465. [Google Scholar]
- Abdelhady, A.M.; Salem, A.K.S.; Amin, O.; Shihada, B.; Alouini, M.S. Visible light communications via intelligent reflecting surfaces: Metasurfaces vs mirror arrays. IEEE Open J. Commun. Soc. 2020, 2, 1–20. [Google Scholar] [CrossRef]
- Ndjiongue, A.R.; Ngatched, T.M.; Dobre, O.A. On the Capacity of RIS-Assisted Intensity-Modulation Optical Channels. IEEE Commun. Lett. 2021, 26, 389–393. [Google Scholar] [CrossRef]
- Najafi, M.; Schmauss, B.; Schober, R. Intelligent reflecting surfaces for free space optical communication systems. IEEE Trans. Commun. 2021, 69, 6134–6151. [Google Scholar] [CrossRef]
- Ndjiongue, A.R.; Ngatched, T.M.; Dobre, O.A.; Armada, A.G.; Haas, H. Analysis of RIS-based terrestrial-FSO link over GG turbulence with distance and jitter ratios. J. Light. Technol. 2021, 39, 6746–6758. [Google Scholar] [CrossRef]
- Benoni, A.; Salucci, M.; Oliveri, G.; Rocca, P.; Li, B.; Massa, A. Planning of EM Skins for Improved Quality-of-Service in Urban Areas. IEEE Trans. Antennas Propag. 2022, 1. [Google Scholar] [CrossRef]
- Aboagye, S.; Ndjiongue, A.R.; Ngatched, T.; Dobre, O.; Poor, H.V. RIS-Assisted Visible Light Communication Systems: A Tutorial. arXiv 2022, arXiv:2204.07198. [Google Scholar]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. Consum. Electron. IEEE Trans. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Tang, T.; Shang, T.; Li, Q. Impact of multiple shadows on visible light communication channel. IEEE Commun. Lett. 2020, 25, 513–517. [Google Scholar] [CrossRef]
- Abdelhady, A.M.; Amin, O.; Salem, A.K.S.; Alouini, M.S.; Shihada, B. Channel characterization of IRS-based visible light communication systems. IEEE Trans. Commun. 2022, 70, 1913–1926. [Google Scholar] [CrossRef]
- Wang, J.B.; Hu, Q.S.; Wang, J.; Chen, M.; Wang, J.Y. Tight bounds on channel capacity for dimmable visible light communications. J. Light. Technol. 2013, 31, 3771–3779. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R.C. Empirical study of particle swarm optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1945–1950. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Parameter | Value of Parameter |
|---|---|
| LED half-power semiangle, | |
| Reflection coefficient, | |
| Physical area of the PD, | |
| Length of west wall, | |
| Height of west wall, | |
| Coordinates on Y-axis of RIS, | |
| Optical filter gain, | 1 |
| Refractive index, a | |
| Field of view, | |
| System bandwidth, B | |
| Photodetector responsiveness of PD, | |
| Conversion ration of optical-to-electrical power, q | 3 |
| Power spectral density of noise, |
| QoS | Position of RIS | Sum Gain of Achievable Rate |
|---|---|---|
| 0 | ||
| NAN | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Zhang, J.; Guo, J.-N. Position Design for Reconfigurable Intelligent-Surface-Aided Indoor Visible Light Communication Systems. Electronics 2022, 11, 3076. https://doi.org/10.3390/electronics11193076
Wu Q, Zhang J, Guo J-N. Position Design for Reconfigurable Intelligent-Surface-Aided Indoor Visible Light Communication Systems. Electronics. 2022; 11(19):3076. https://doi.org/10.3390/electronics11193076
Chicago/Turabian StyleWu, Qi, Jian Zhang, and Jia-Ning Guo. 2022. "Position Design for Reconfigurable Intelligent-Surface-Aided Indoor Visible Light Communication Systems" Electronics 11, no. 19: 3076. https://doi.org/10.3390/electronics11193076
APA StyleWu, Q., Zhang, J., & Guo, J.-N. (2022). Position Design for Reconfigurable Intelligent-Surface-Aided Indoor Visible Light Communication Systems. Electronics, 11(19), 3076. https://doi.org/10.3390/electronics11193076