
Addressing a New Class of Multi-Objective Passive Device Optimization for Radiofrequency Circuit Design



Abstract
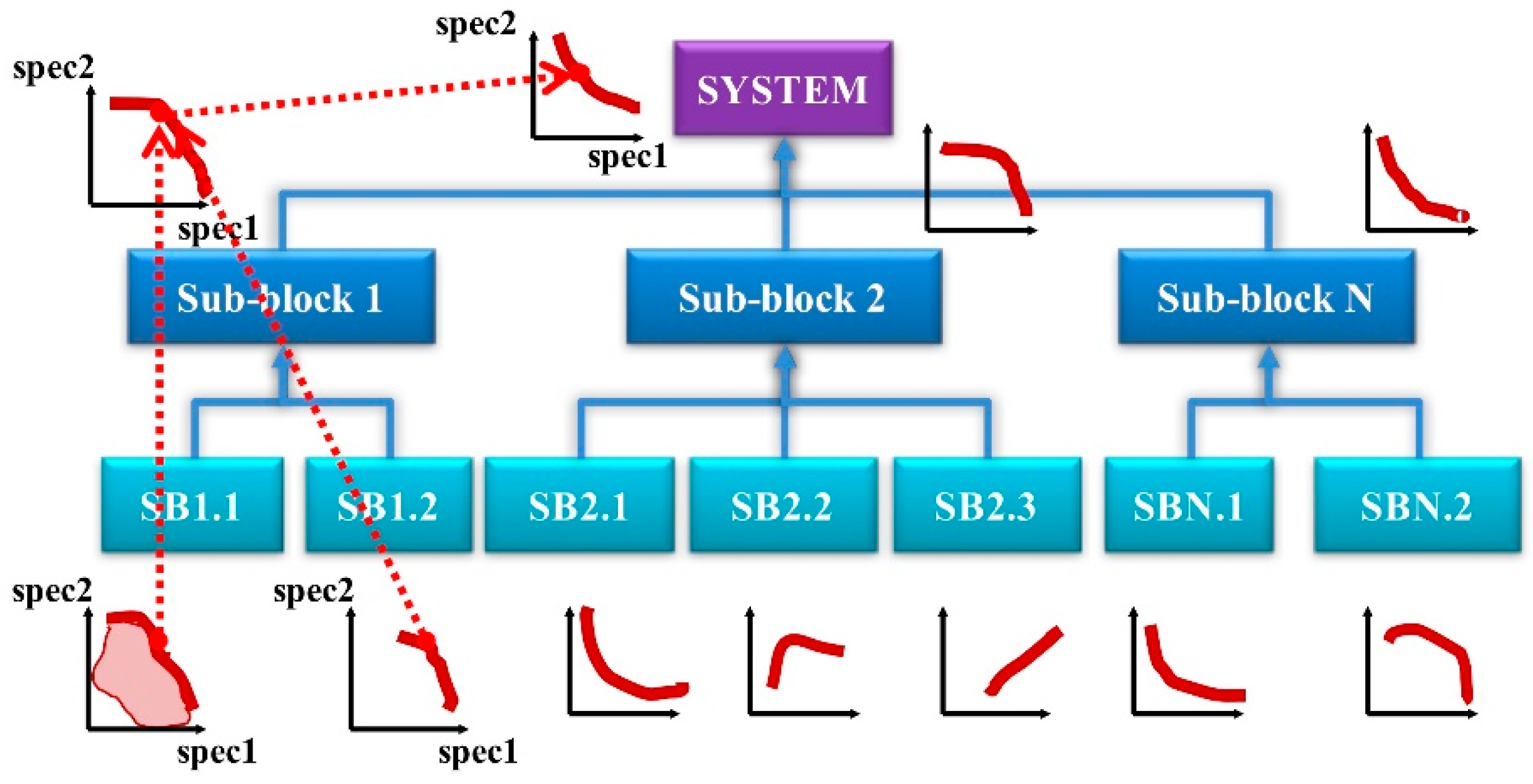
:1. Introduction
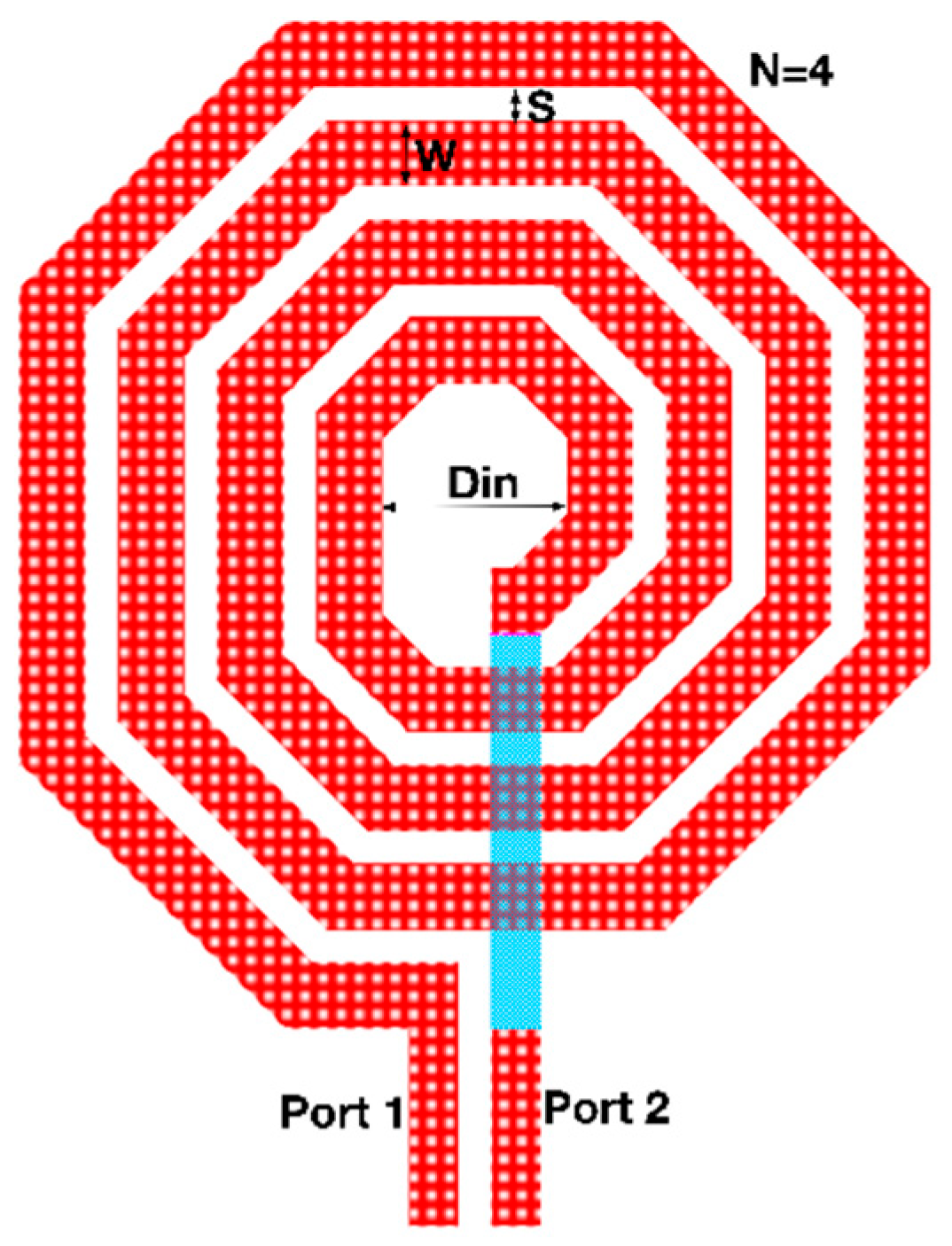
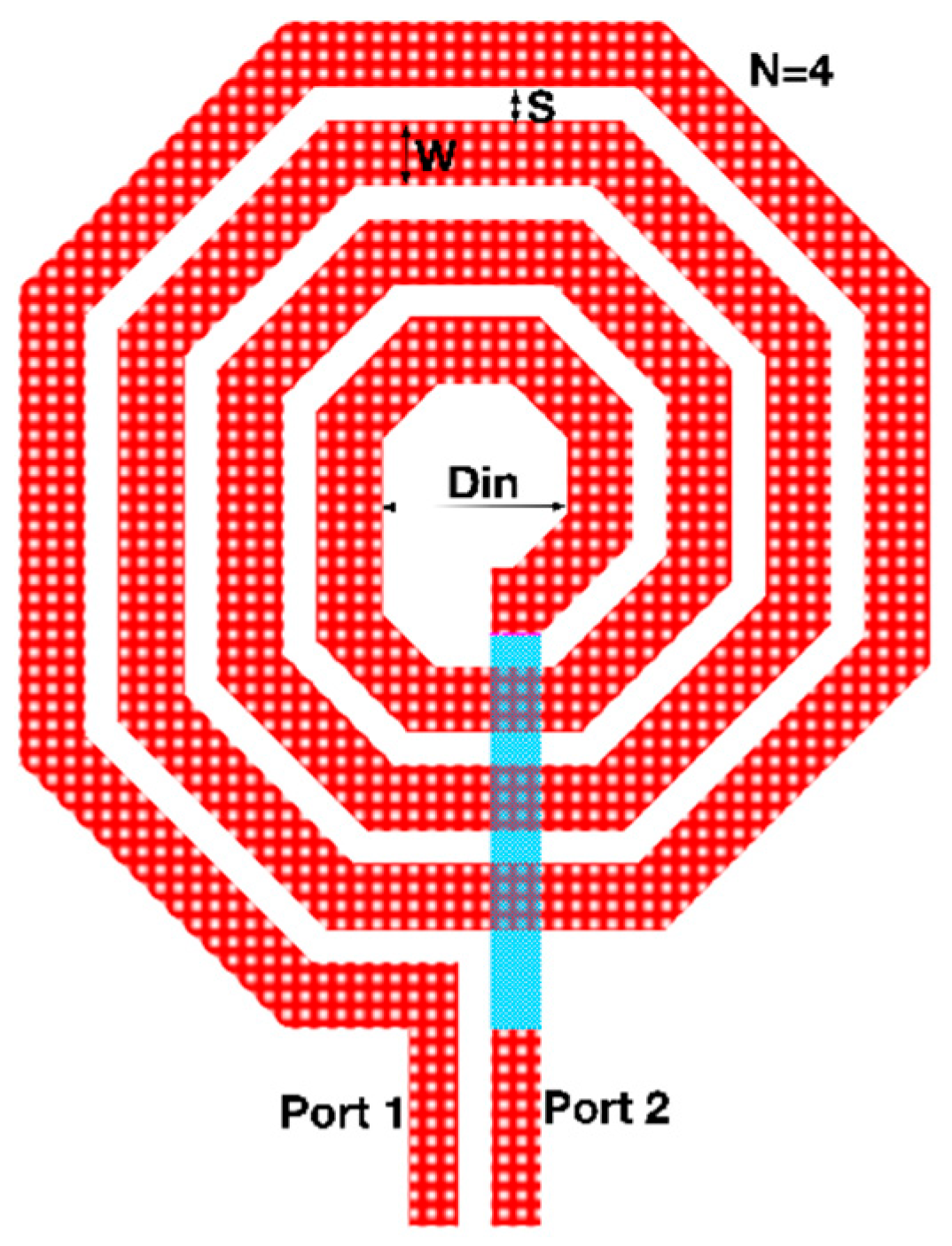
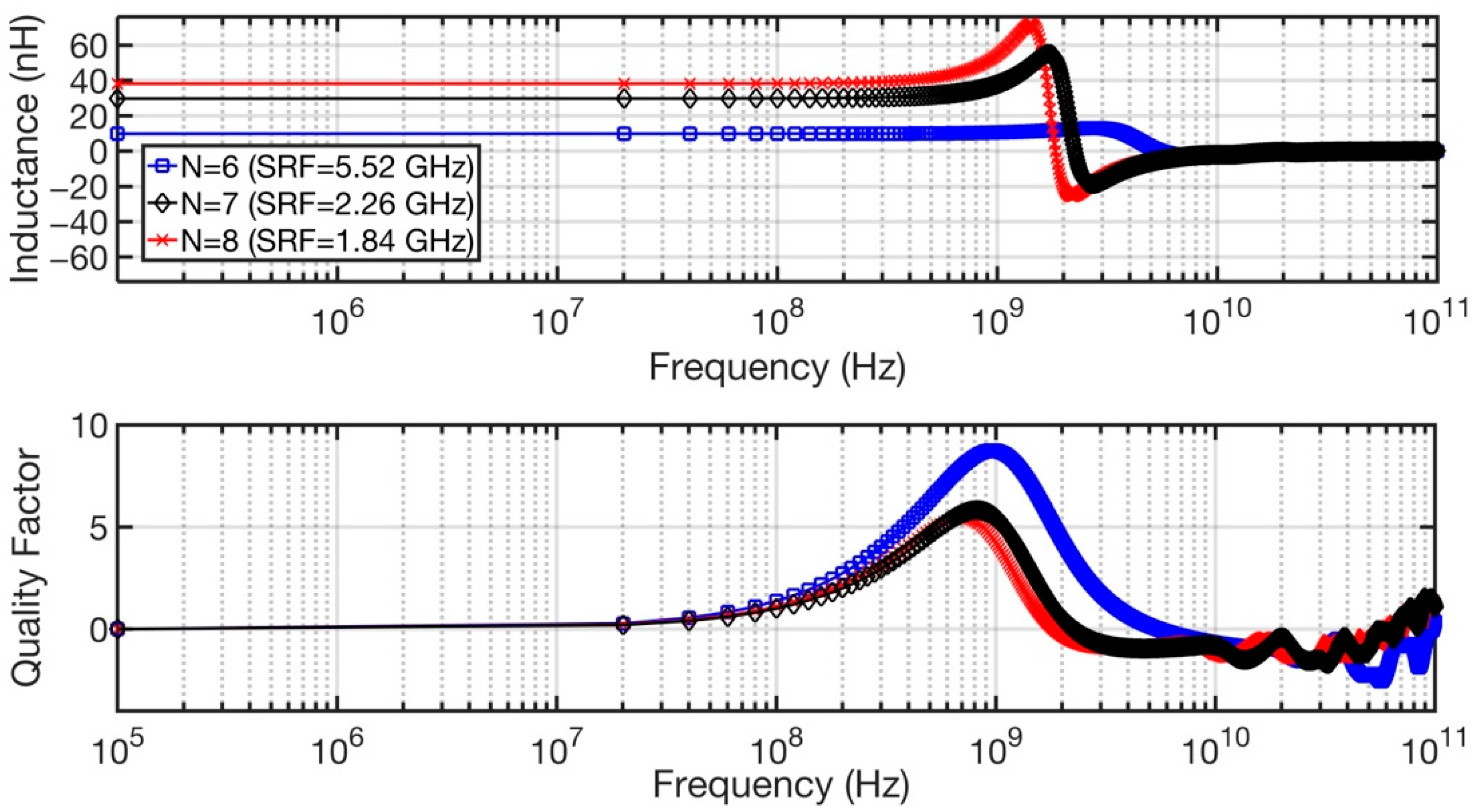
2. Inductor Design Problem
3. Problem Formulation
4. Proposed Algorithm
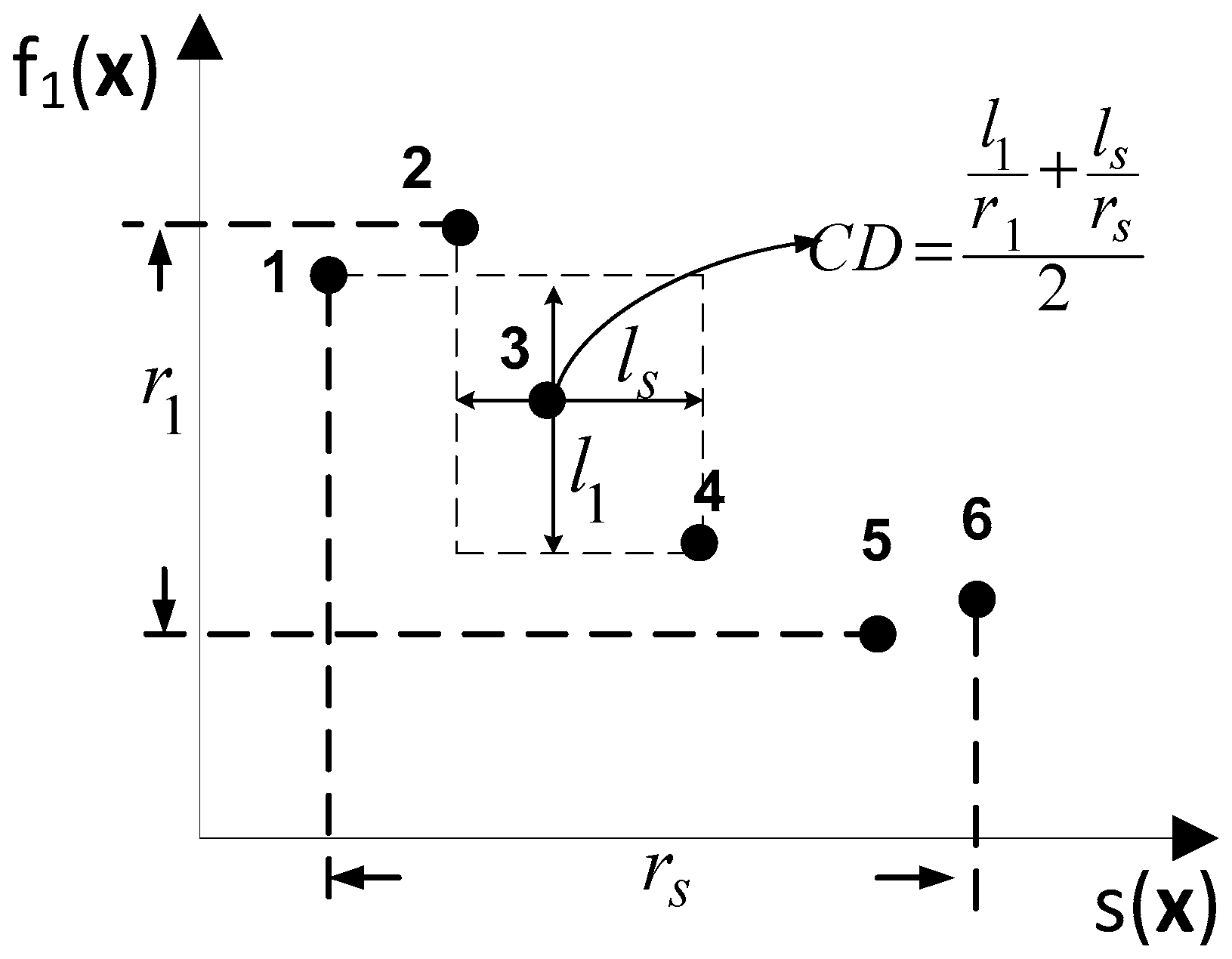
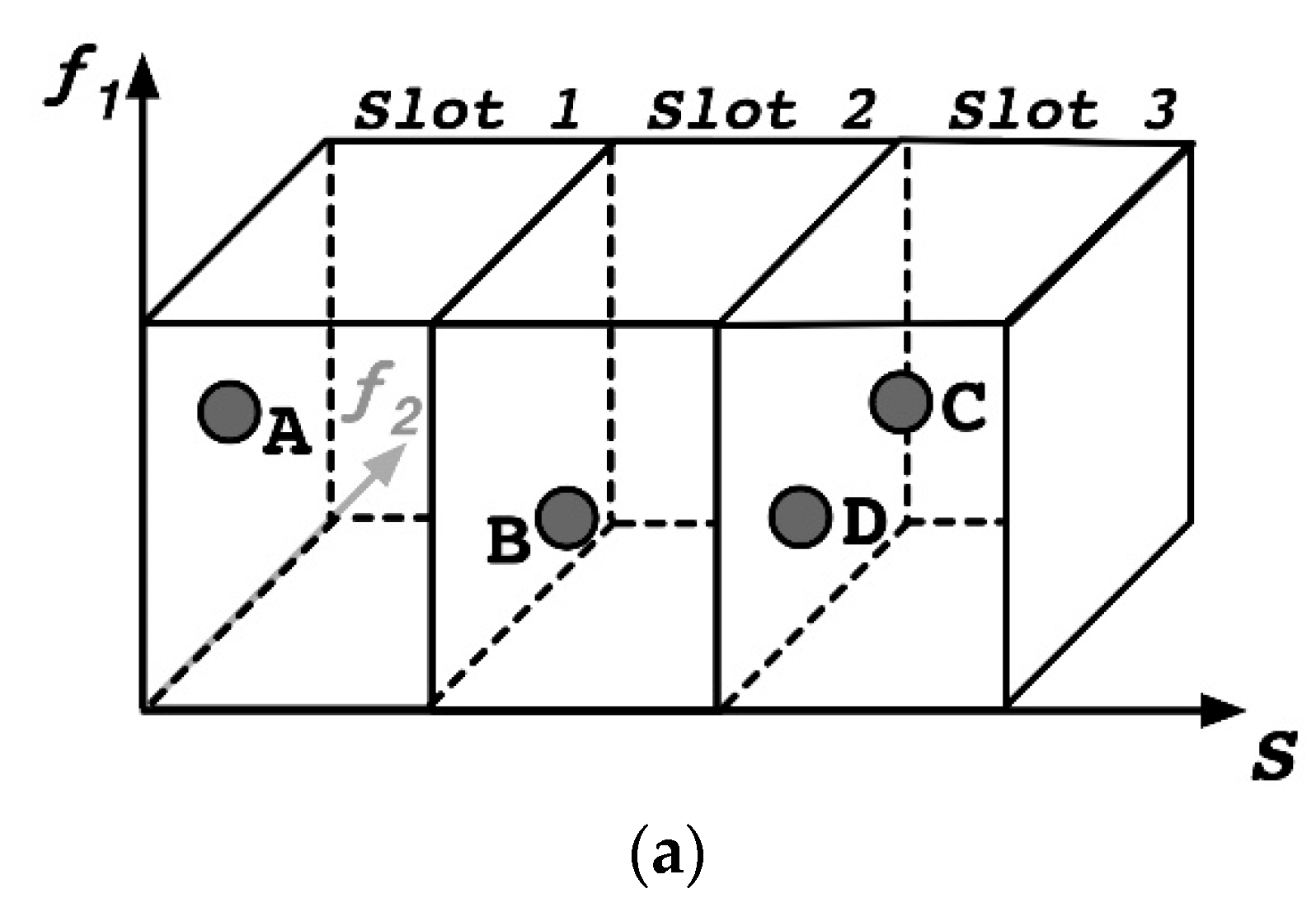
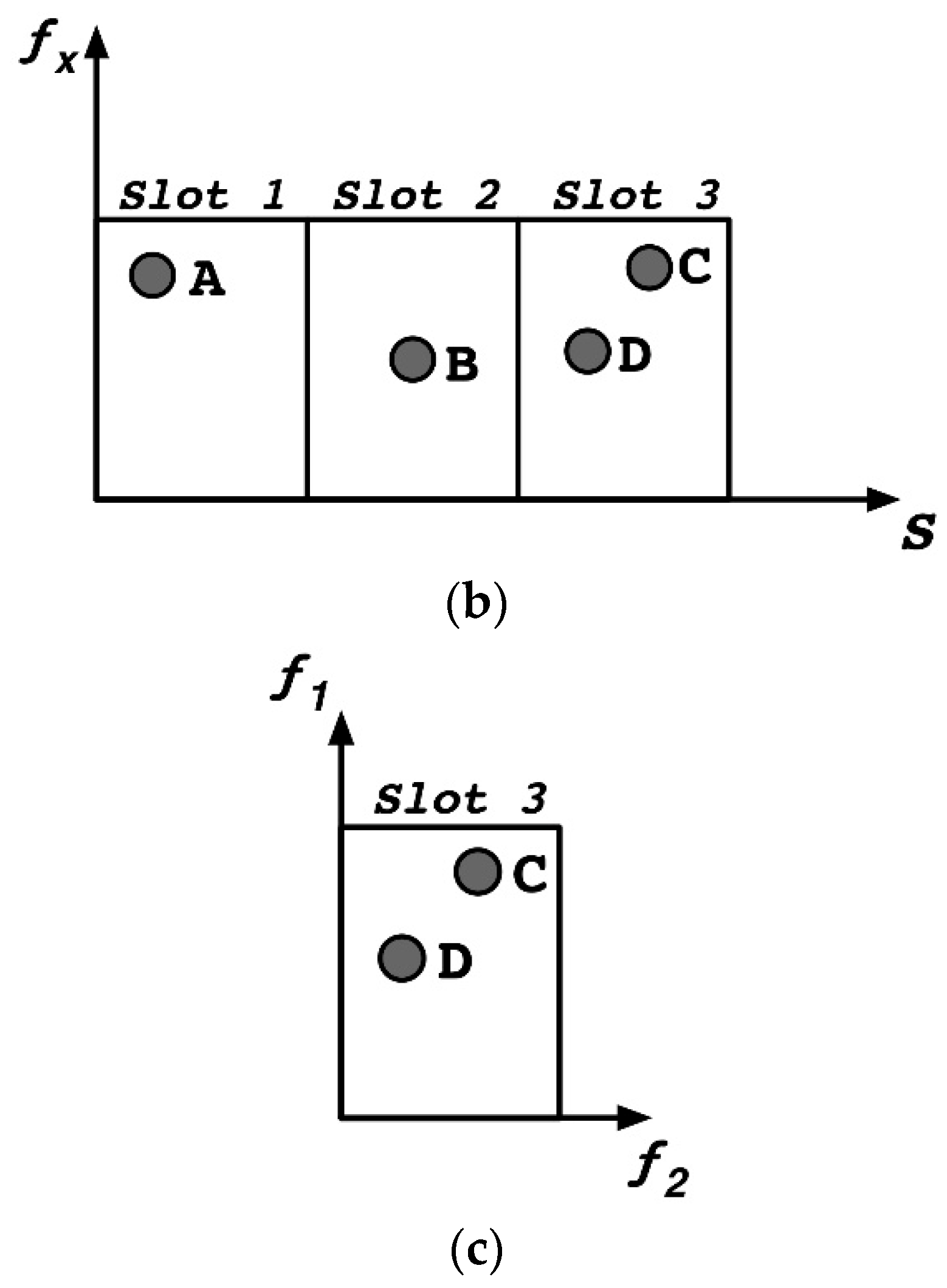
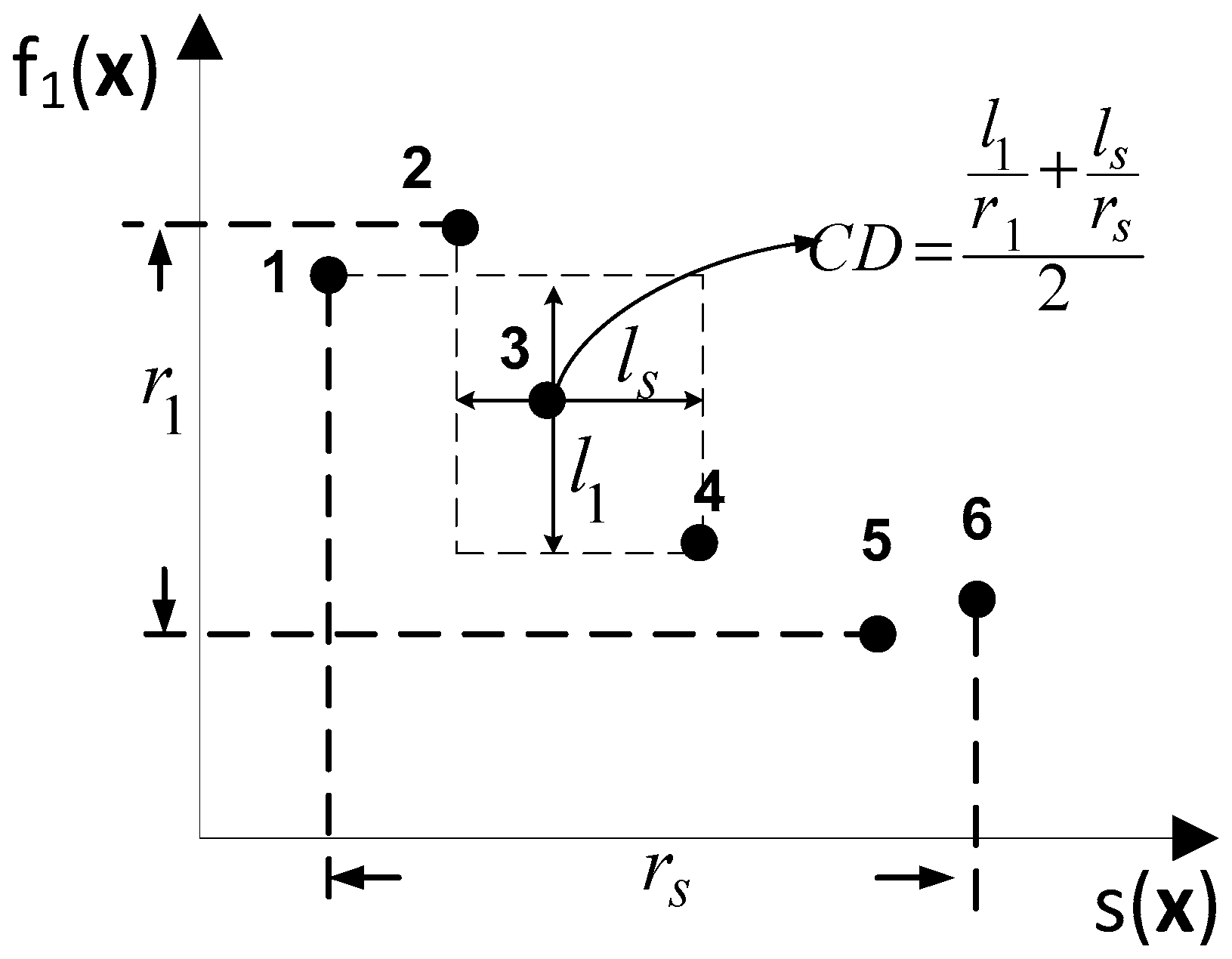
4.1. Slot-Based Sweep Dominance and Non-Dominated Sorting
4.2. Diversity
4.3. Proposed Algorithm
| Algorithm 1: Sweep-Pareto front calculation |
Inputs: the maximum number of generations ngen, the population size N, the number of slots NS, the crossover parameter settings, the mutation parameter settings.
|
- If two infeasible solutions are compared, the one with the smallest constraint violation is selected.
- If one solution is feasible and the other is infeasible, the feasible one is selected.
- If two feasible solutions are compared, the one that sweep-dominates the other is selected.
- If two feasible solutions that do not sweep-dominate each other are compared, the one with a higher crowding distance is selected.
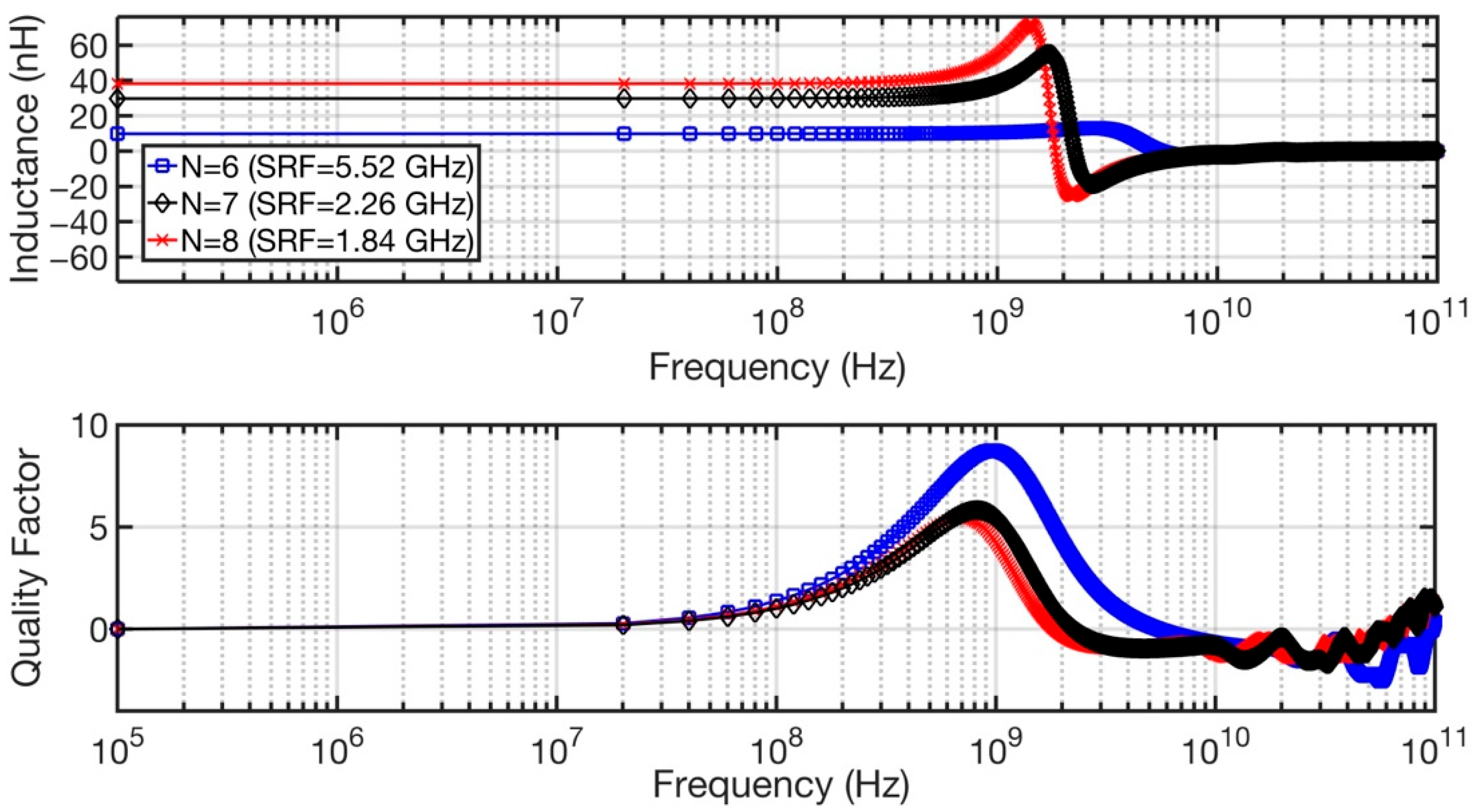
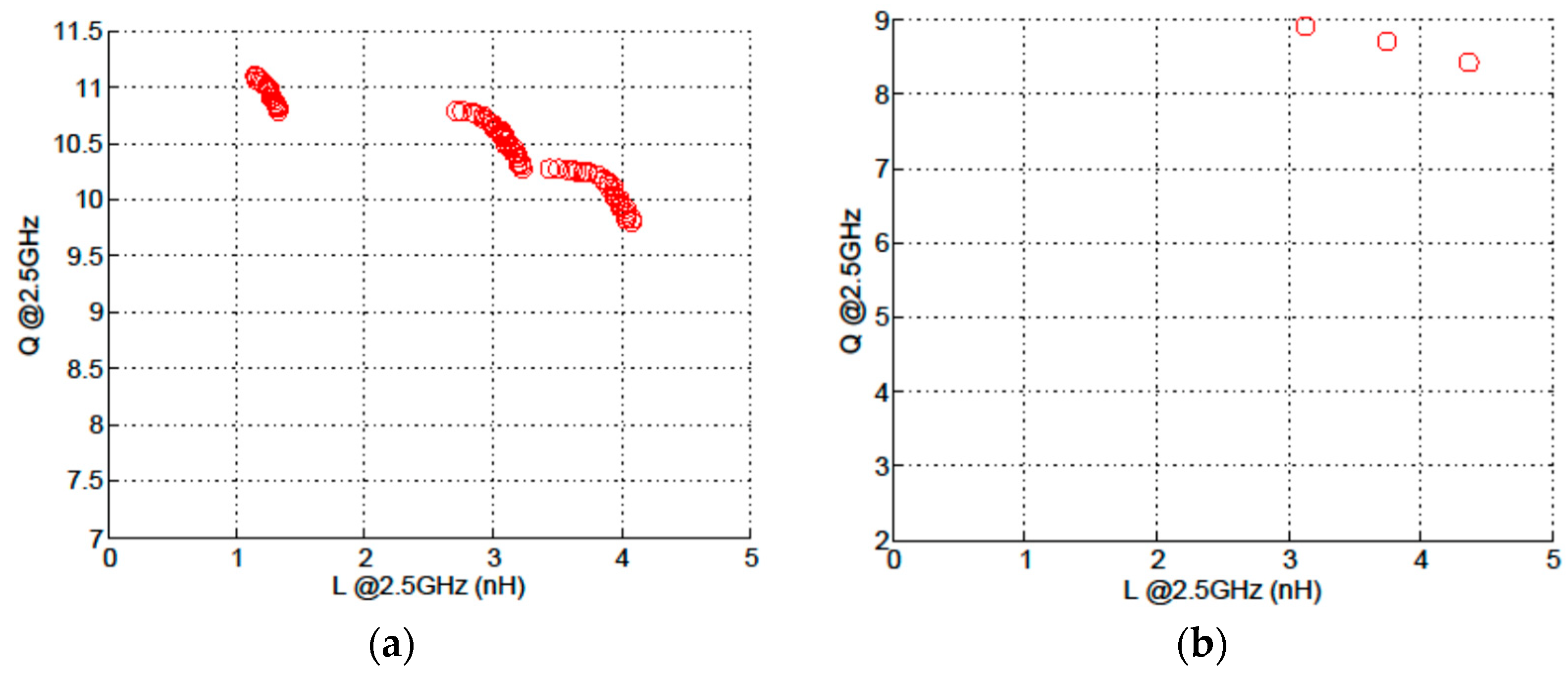
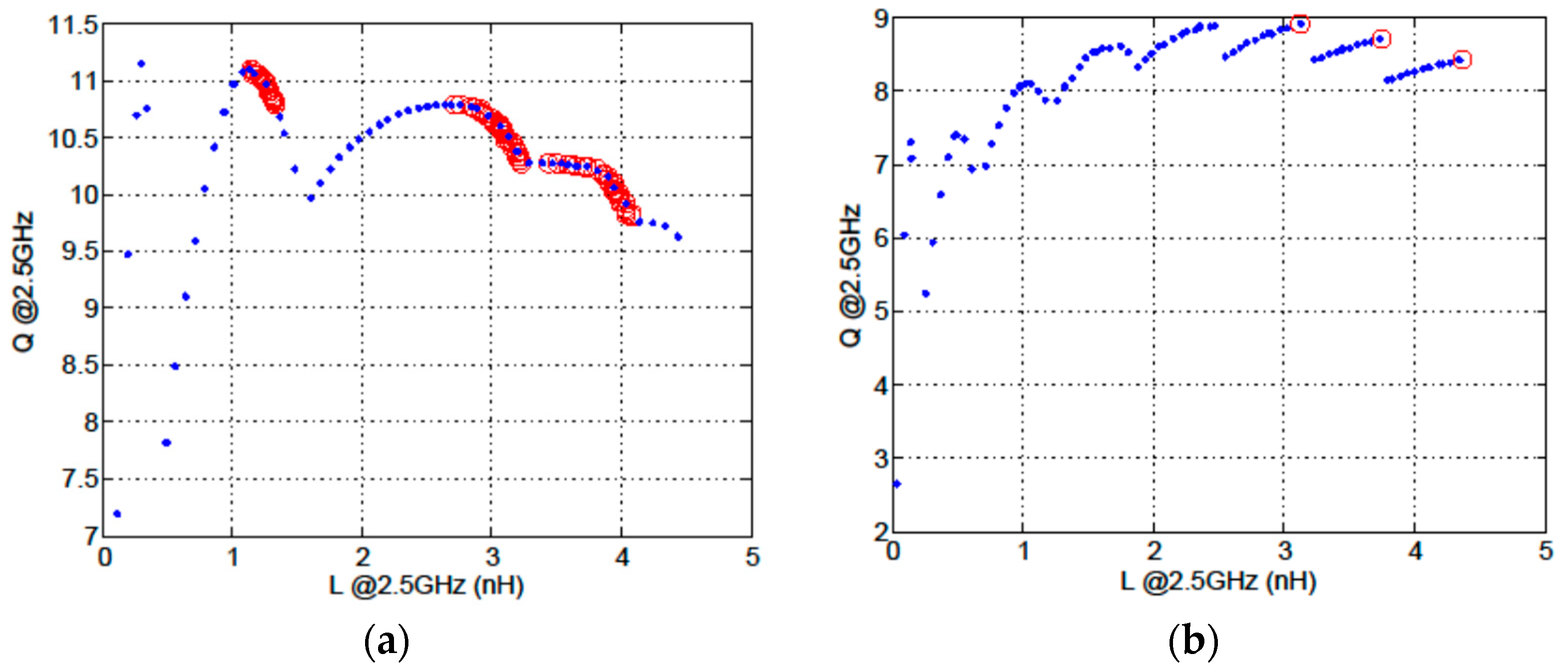
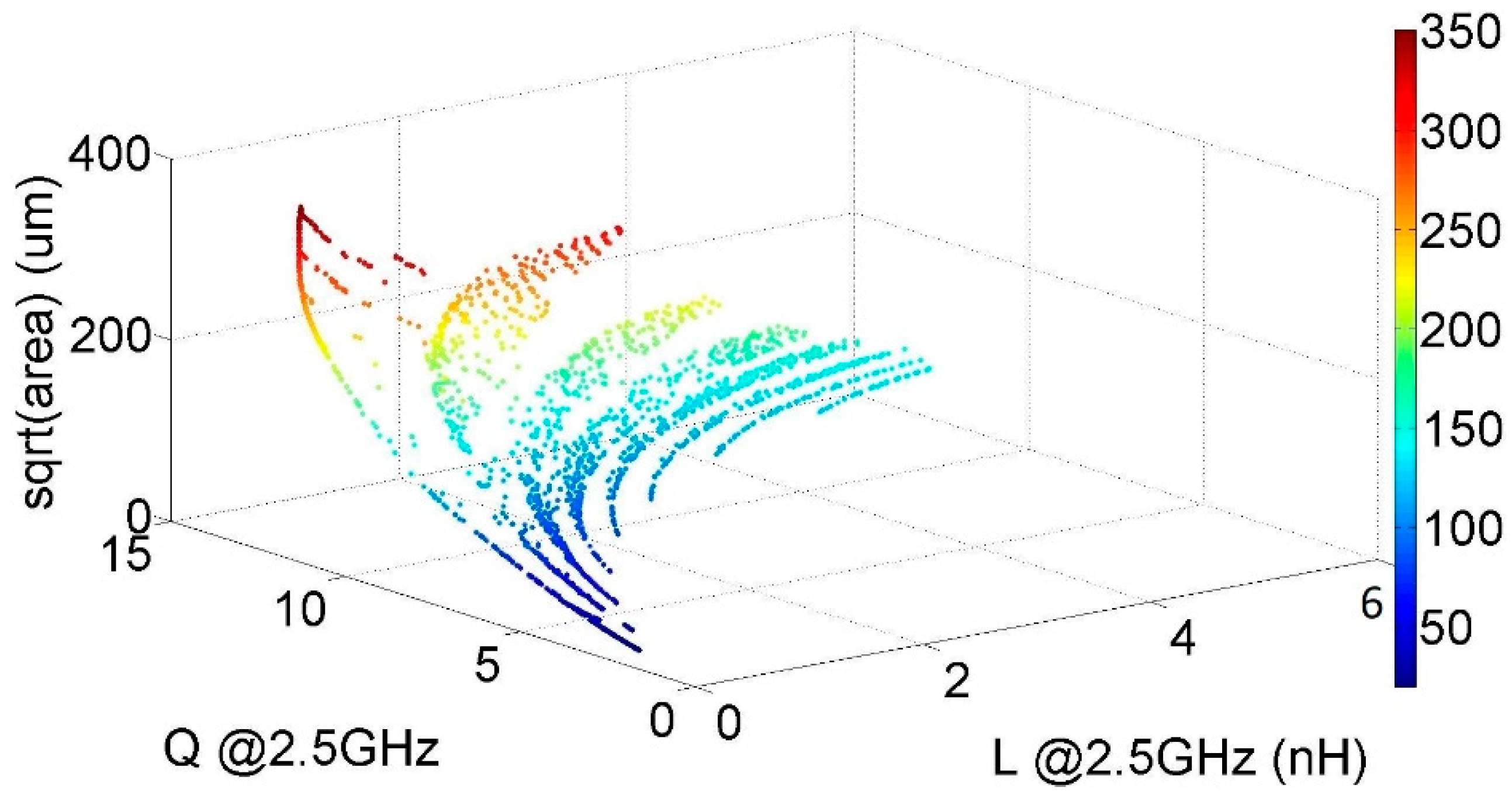
5. Experimental Results for Inductor Optimization
6. Mathematical Benchmark Problem
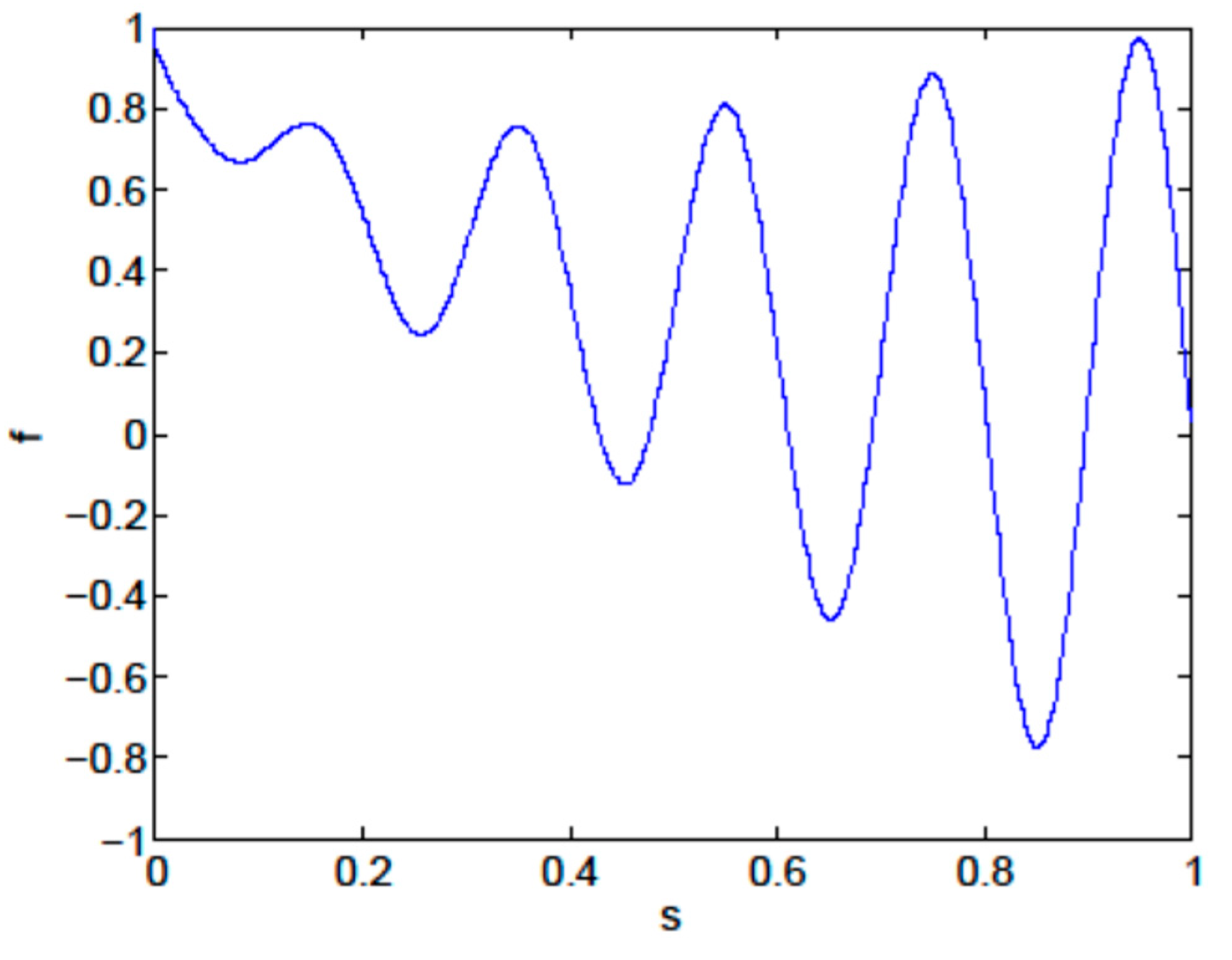
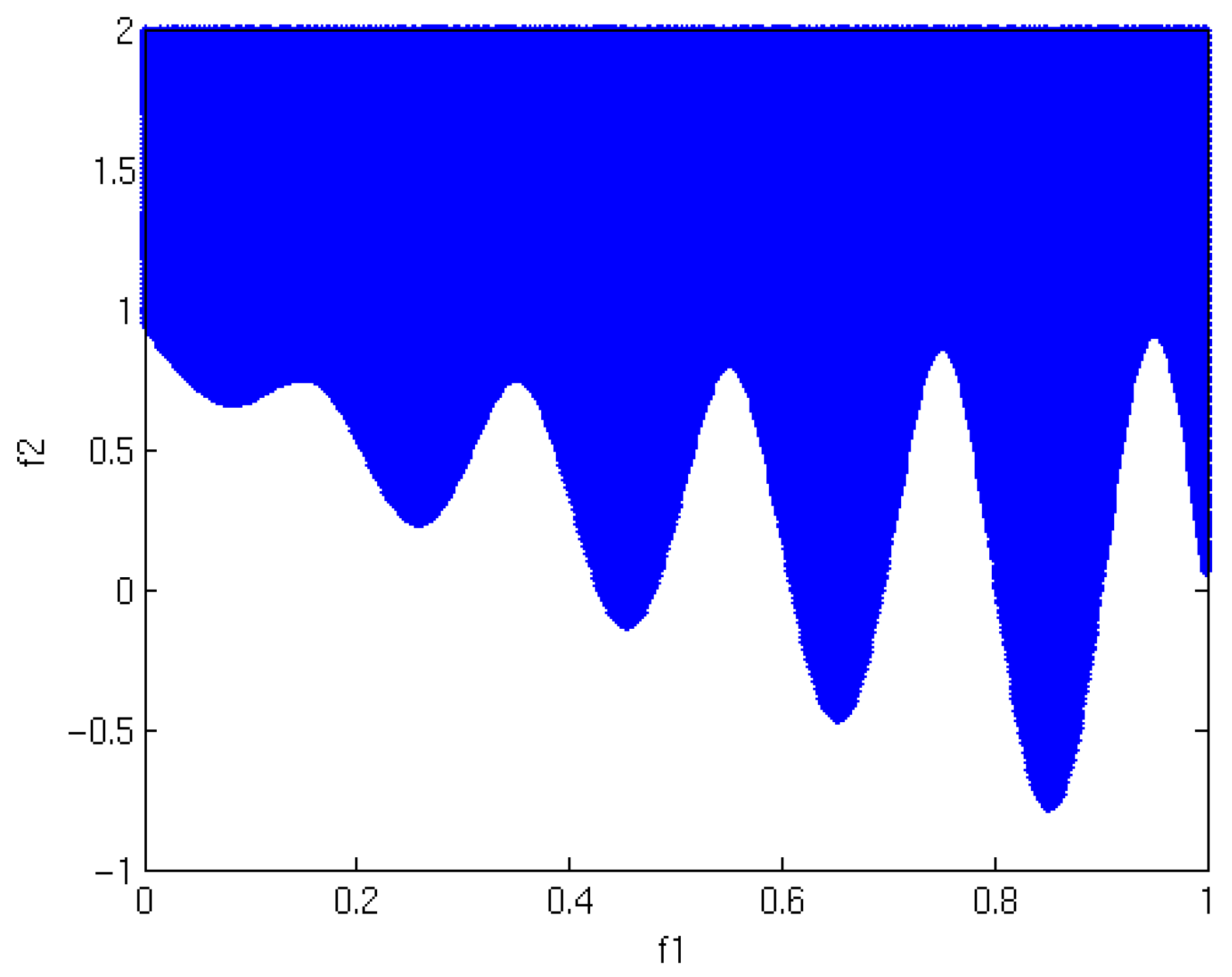
6.1. Mathematical Benchmark Function
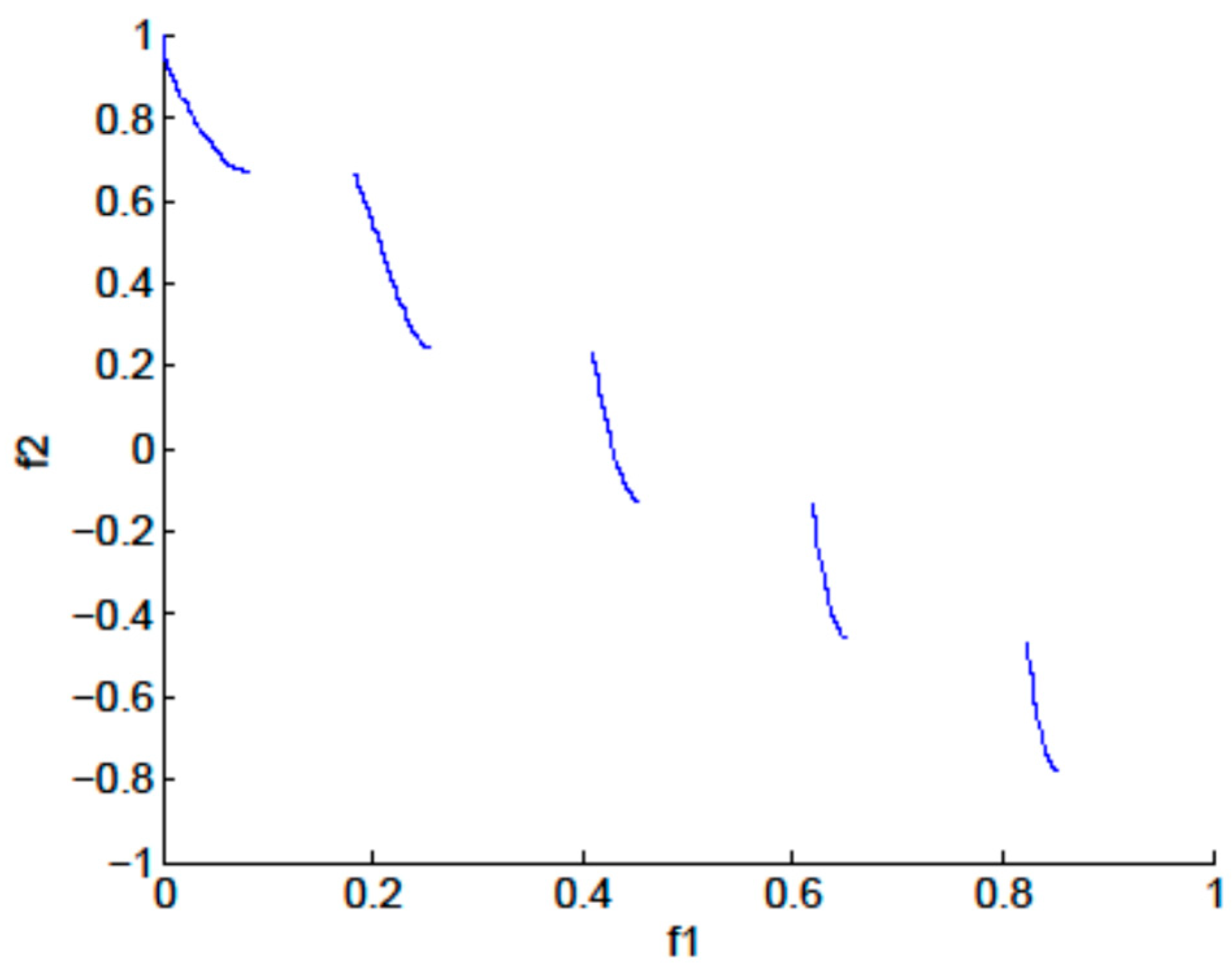
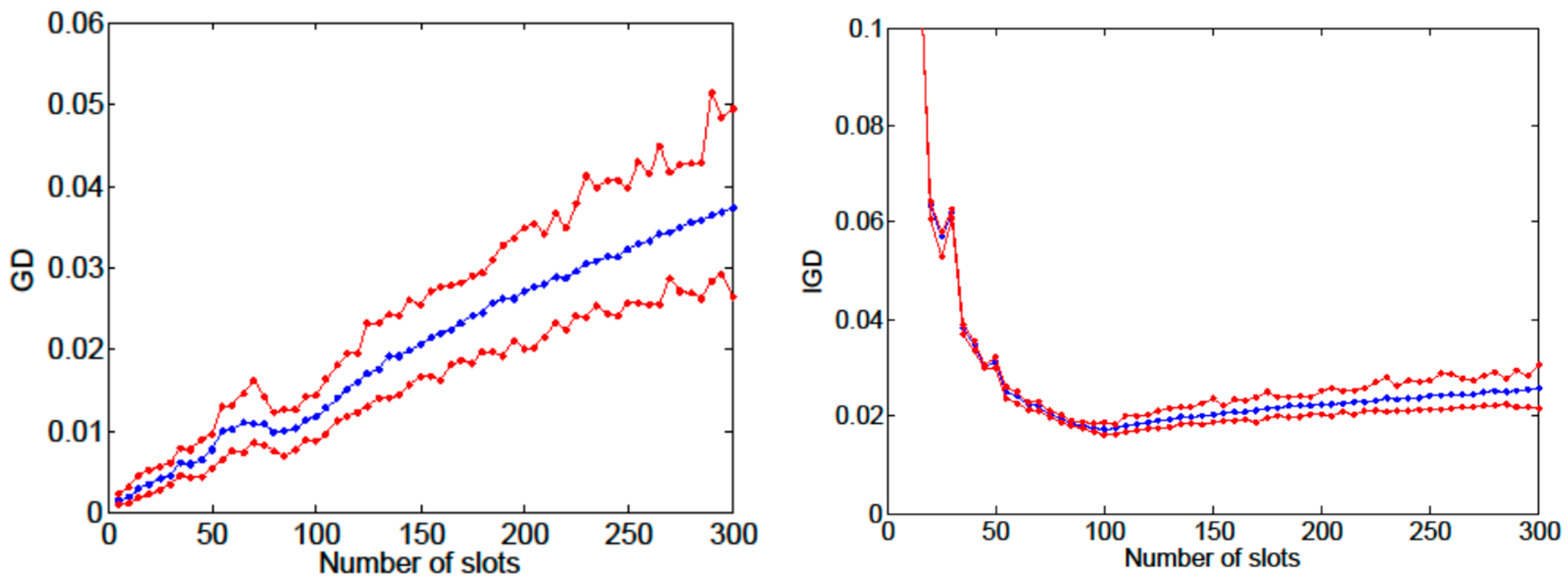
6.2. Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rutenbar, R.; Gielen, G.; Roychowdhury, J. Hierarchical modeling, optimization and synthesis for system-level analog and RF designs. Proc. IEEE 2007, 95, 640–669. [Google Scholar] [CrossRef]
- Alpaydin, G.; Balkir, S.; Dundar, G. An evolutionary approach to automatic synthesis of high-performance analog integrated circuits. IEEE Trans. Evol. Comput. 2003, 7, 240–252. [Google Scholar] [CrossRef]
- Liu, B.; Fernandez, F.V.; Gielen, G. Efficient and accurate statistical analog yield optimization and variation-aware circuit sizing based on computational intelligence techniques. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2011, 30, 793–805. [Google Scholar] [CrossRef]
- Lourenço, N.; Martins, R.; Horta, N. Automatic Analog IC Sizing and Optimization Constrained with PVT Corners and Layout Effects; Springer: Cham, Switzerland, 2017. [Google Scholar] [CrossRef]
- Liu, B.; Gielen, G.; Fernandez, F.V. Automated Design of Analog and High-Frequency Circuits. A Computational Intelligence Approach; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Hussain, A.; Kim, H.-M. Evaluation of Multi-Objective Optimization Techniques for Resilience Enhancement of Electric Vehicles. Electronics 2021, 10, 3030. [Google Scholar] [CrossRef]
- Stehr, G.; Graeb, H.; Antreich, K. Analog performance space exploration by normal-boundary intersection and by Fourier-Motzkin elimination. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2007, 26, 1733–1748. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Q.; Fernandez, F.V.; Gielen, G. An efficient evolutionary algorithm for chance-constrained bi-objective stochastic optimization. IEEE Trans. Evol. Comput. 2013, 17, 786–796. [Google Scholar] [CrossRef]
- Eeckelaert, T.; McConaghy, T.; Gielen, G. Efficient multiobjective synthesis of analog circuits using hierarchical Pareto-optimal performance hypersurfaces. In Proceedings of the Design, Automation and Test in Europe Conference, Munich, Germany, 7–11 March 2005; Volume 2, pp. 1070–1075. [Google Scholar] [CrossRef]
- Gonzalez-Echevarria, R.; Castro-López, R.; Roca, E.; Fernández, F.V.; Sieiro, J.; Vidal, N.; López-Villegas, J.M. Automated generation of the optimal performance trade-offs of integrated inductors. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2014, 33, 1269–1273. [Google Scholar] [CrossRef]
- Passos, F.; Roca, E.; Castro-Lopez, R.; Fernandez, F.V. Radio-frequency inductor synthesis using evolutionary computation and Gaussian process surrogate modeling. Appl. Soft Comput. 2017, 60, 495–507. [Google Scholar] [CrossRef]
- Gonzalez-Echevarria, R.; Roca, E.; Castro-López, R.; Fernández, F.V.; Sieiro, J.; López-Villegas, J.M.; Vidal, N. An automated design methodology of RF circuits by using pareto-optimal fronts of EM-simulated inductors. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2017, 36, 15–26. [Google Scholar] [CrossRef]
- Passos, F.; Roca, E.; Sieiro, J.; Fiorelli, R.; Castro-López, R.; López-Villegas, J.M.; Fernández, F.V. A Multilevel Bottom-Up Optimization Methodology for the Automated Synthesis of RF Systems. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2020, 39, 560–571. [Google Scholar] [CrossRef]
- Kotti, M.; Gonzalez-Echevarria, R.; Fernández, F.V.; Roca, E.; Sieiro, J.; Castro-López, R.; Fakhfakh, M.; López-Villegas, J.M. Generation of surrogate models of Pareto-optimal performance trade-offs of planar inductors. Analog. Integr. Circuits Signal Processing 2014, 78, 87–97. [Google Scholar] [CrossRef]
- Passos, F.; Roca, E.; Castro-Lopez, R.; Fernandez, F.V. An algorithm for a class of real-life multi-objective optimization problems with a sweeping objective. In Proceedings of the IEEE Congress on Evolutionary Computation, Donostia, Spain, 5–8 June 2017; pp. 737–740. [Google Scholar] [CrossRef]
- Deb, K. An efficient constraint handling method for genetic algorithms. Comput. Methods Appl. Mech. Eng. 2000, 186, 311–338. [Google Scholar] [CrossRef]
- Jan, M.A.; Zhang, Q. MOEA/D for constrained multiobjective optimization: Some preliminary experimental results. In Proceedings of the UK Workshop on Computational Intelligence, Colchester, UK, 8–10 September 2010. [Google Scholar] [CrossRef]
- Asafuddoula, M.; Ray, T.; Sarker, R.; Alam, K. An adaptive constraint handling approach embedded MOEA/D. In Proceedings of the IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012. [Google Scholar] [CrossRef]
- Zapotecas Martinez, S.; Coello, C.A. A multi-objective evolutionary algorithm based on decomposition for constrained multi-objective optimization. In Proceedings of the IEEE Congress on Evolutionary Computation, Beijing, China, 6–11 July 2014. [Google Scholar] [CrossRef]
- Jan, M.A.; Khanum, R.A. A study of two penalty-parameterless constraint handling techniques in the framework of MOEA/D. Appl. Soft Comput. 2013, 13, 128–148. [Google Scholar] [CrossRef]
- Lopez-Villegas, J.M.; Samitier, J.; Cane, C.; Losantos, P.; Bausells, J. Improvement of the quality factor of RF integrated inductors by layout optimization. IEEE Trans. Microw. Theory Tech. 2000, 48, 76–83. [Google Scholar] [CrossRef]
- Chen, H.-H.; Hsu, Y.-W. Analytic Design of on-Chip Spiral Inductor with Variable Line Width. Electronics 2022, 11, 2029. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A multiobjective evolutionary algorithm based on decomposition. IEEE Trans. Evol. Comput. 2007, 11, 71–731. [Google Scholar] [CrossRef]
- Hua, Y.; Jin, Y.; Hao, K. A clustering-based adaptive evolutionary algorithm for multiobjective optimization with irregular Pareto fronts. IEEE Trans. Cybern. 2019, 49, 2758–2770. [Google Scholar] [CrossRef]
- Jiang, S.; Yang, S. An improved multiobjective optimization evolutionary algorithm based on decomposition for complex Pareto fronts. IEEE Trans. Cybern. 2016, 46, 421–437. [Google Scholar] [CrossRef]
- Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; Wiley: Hoboken, NJ, USA, 2001. [Google Scholar]
- Zitzler, E.; Deb, K.; Thiele, L. Comparison of multiobjective evolutionary algorithms: Empirical results. Evol. Comput. 2000, 8, 173–195. [Google Scholar] [CrossRef]
- Van Veldhuizen, D.A. Multiobjective Evolutionary Algorithms: Classifications, Analyzes, and New Innovations. Ph.D. Dissertation, Graduate School of Engineering of the Air Force Institute of Technology, Air University, Fairborn, OH, USA, June 1999. [Google Scholar]
- Bezerra, L.C.; Lopez-Ibañez, M.; Stutzle, T. An empirical assessment of the properties of inverted generational distance on multi- and many-objective optimization. In Proceedings of the 9th International Conference on Evolutionary Multi-Criterion Optimization, Muenster, Germany, 19–22 March 2017; pp. 31–45. [Google Scholar] [CrossRef]
- Zitzler, E.; Thiele, L.; Laumanns, M.; Fonseca, C.; da Fonseca, V. Performance assessment of multi-objective optimizers: An analysis and review. IEEE Trans. Evol. Comput. 2003, 7, 117–132. [Google Scholar] [CrossRef]
- Ishibushi, H.; Masuda, H.; Tanigaki, Y.; Nojima, Y. Difficulties in specifying reference points to calculate the inverted generational distance for many-objective optimization problems. In Proceedings of the IEEE Symposium Computational Intelligence in Multi-Criteria Decision-Making, Orlando, FL, USA, 9–12 December 2014; pp. 170–177. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Minimum | Step | Maximum |
|---|---|---|---|
| N | 1 | 1 | 10 |
| w | 5 μm | 0.05 μm | 25 μm |
| Din | 10 μm | 0.05 μm | 300 μm |
| s | 2.5 μm | - | 2.5 μm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Passos, F.; Roca, E.; Castro-López, R.; Fernández, F.V. Addressing a New Class of Multi-Objective Passive Device Optimization for Radiofrequency Circuit Design. Electronics 2022, 11, 2624. https://doi.org/10.3390/electronics11162624
Passos F, Roca E, Castro-López R, Fernández FV. Addressing a New Class of Multi-Objective Passive Device Optimization for Radiofrequency Circuit Design. Electronics. 2022; 11(16):2624. https://doi.org/10.3390/electronics11162624
Chicago/Turabian StylePassos, Fabio, Elisenda Roca, Rafael Castro-López, and Francisco V. Fernández. 2022. "Addressing a New Class of Multi-Objective Passive Device Optimization for Radiofrequency Circuit Design" Electronics 11, no. 16: 2624. https://doi.org/10.3390/electronics11162624
APA StylePassos, F., Roca, E., Castro-López, R., & Fernández, F. V. (2022). Addressing a New Class of Multi-Objective Passive Device Optimization for Radiofrequency Circuit Design. Electronics, 11(16), 2624. https://doi.org/10.3390/electronics11162624