
Performance Evaluation of UAV-Based NOMA Networks with Hardware Impairment



Abstract
:1. Introduction
- Unlike in [9,10,11,12,13,14,17,18,19,20,21], where HIs were ignored and UAVs were absent, respectively, we investigate the outage performance, i.e., outage probability and ergodic capacity, of a UAV-based system consisting of two NOMA users and based on formulating mathematical equations with coefficients representing HI. Moreover, this is the first time a UAV-based system with HI issues has been considered.
- The performance of the proposed system is evaluated based on derivations of the closed-form expressions of the outage probability and ergodic capacity. To verify the derived expressions, we use Monte-Carlo simulations.
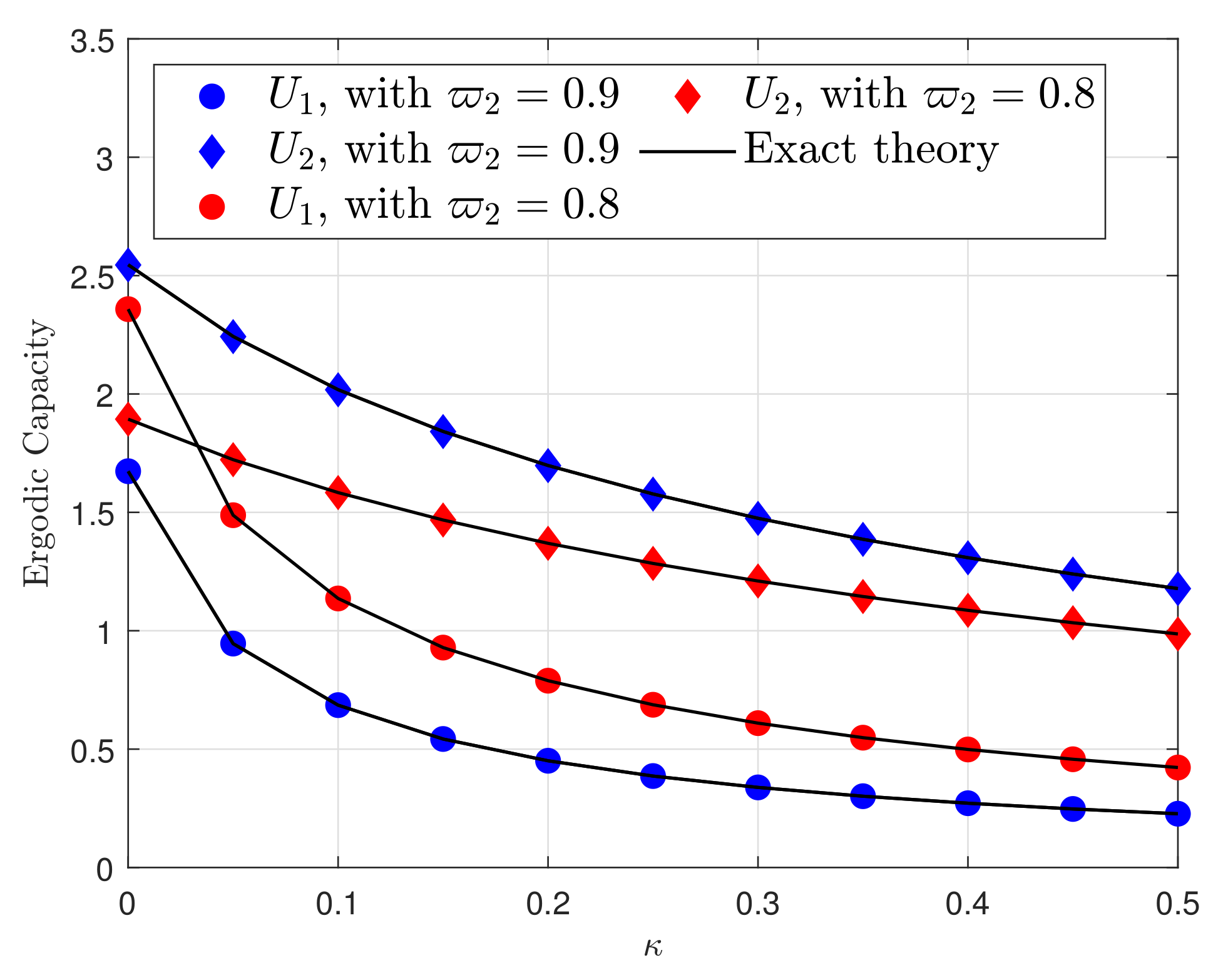
- The effects of HI on the proposed system are carefully investigated to provide a guideline for UAV-based system design. The results show that under the effects of HI, in terms of the ergodic capacity, the performance of the far user is better than that of the near user at a high transmit power of the UAV.
2. System Model
3. Performance Analysis
3.1. The Channel Model
3.2. Outage Probability Analysis
3.3. Asymptotic Analysis
3.4. Throughput Analysis
4. Ergodic Capacity
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Small Unmanned Aerial Vehicles for Aerial Imaging, Recreation and Aerial Games. Global Market Analysis and Forecast. Available online: https://www.prnewswire.com/news-releases/consumer-drones--small-unmanned-aerial-vehicles-for-aerial-imaging-recreation-and-aerial-games-global-market-analysis-and-forecasts-300291554.html (accessed on 19 October 2021).
- Liu, Y.; Dai, H.N.; Wang, Q.; Shukla, M.K.; Imran, M. Unmanned aerial vehicle for internet of everything: Opportunities and challenges. Comput. Commun. 2020, 155, 66–83. [Google Scholar] [CrossRef] [Green Version]
- Filippone, A. Flight Performance of Fixed and Rotary Wing Aircraft; American Institute of Aeronautics & Ast (AIAA): Reston, VA, USA, 2006. [Google Scholar]
- Shen, Y.; Pan, Z.; Liu, N.; You, X. Joint Design and Performance Analysis of a Full-Duplex UAV Legitimate Surveillance System. Electronics 2020, 9, 407. [Google Scholar] [CrossRef] [Green Version]
- Wei, M.; Chen, Y.; Ding, M. On the Performance of UAV-Aided Content Caching in Small-Cell Networks with Joint Transmission. Electronics 2021, 10, 1040. [Google Scholar] [CrossRef]
- Nguyen, P.X.; Nguyen, V.D.; Nguyen, H.V.; Shin, O.S. UAV-Assisted Secure Communications in Terrestrial Cognitive Radio Networks: Joint Power Control and 3D Trajectory Optimization. IEEE Trans. Veh. Technol. 2021, 70, 3298–3313. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Vu, T.H.; Nguyen, T.V.; Costa, D.B.d.; Ho, C.D. Underlay Cognitive NOMA-Based Coordinated Direct and Relay Transmission. IEEE Wirel. Commun. Lett. 2021, 10, 854–858. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Nguyen, T.V.; Vu, T.H.; Costa, D.B.d.; Ho, C.D. IoT-Based Coordinated Direct and Relay Transmission with Non-Orthogonal Multiple Access. IEEE Wirel. Commun. Lett. 2021, 10, 503–507. [Google Scholar] [CrossRef]
- Sharma, P.K.; Kim, D.I. UAV-Enabled Downlink Wireless System with Non-Orthogonal Multiple Access. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, Q.; Xu, J.; Zhang, R. Capacity Characterization of UAV-Enabled Two-User Broadcast Channel. IEEE J. Sel. Areas Commun. 2018, 36, 1955–1971. [Google Scholar] [CrossRef] [Green Version]
- Sohail, M.F.; Leow, C.Y.; Won, S. Non-Orthogonal Multiple Access for Unmanned Aerial Vehicle Assisted Communication. IEEE Access 2018, 6, 22716–22727. [Google Scholar] [CrossRef]
- Liu, X.; Wang, J.; Zhao, N.; Chen, Y.; Zhang, S.; Ding, Z.; Yu, F.R. Placement and Power Allocation for NOMA-UAV Networks. IEEE Wirel. Commun. Lett. 2019, 8, 965–968. [Google Scholar] [CrossRef] [Green Version]
- Tang, R.; Cheng, J.; Cao, Z. Joint Placement Design, Admission Control, and Power Allocation for NOMA-Based UAV Systems. IEEE Wirel. Commun. Lett. 2020, 9, 385–388. [Google Scholar] [CrossRef]
- Mu, X.; Liu, Y.; Guo, L.; Lin, J. Non-Orthogonal Multiple Access for Air-to-Ground Communication. IEEE Trans. Commun. 2020, 68, 2934–2949. [Google Scholar] [CrossRef] [Green Version]
- Pang, X.; Tang, J.; Zhao, N.; Zhang, X.; Qian, Y. Energy-efficient design for mmWave-enabled NOMA-UAV networks. Sci. China Inf. Sci. 2021, 64, 1–14. [Google Scholar] [CrossRef]
- Zhao, N.; Pang, X.; Li, Z.; Chen, Y.; Li, F.; Ding, Z.; Alouini, M.S. Joint trajectory and precoding optimization for UAV-assisted NOMA networks. IEEE Trans. Commun. 2019, 67, 3723–3735. [Google Scholar] [CrossRef] [Green Version]
- Tung, N.T.; Nam, P.M.; Tin, P.T. Performance evaluation of a two-way relay network with energy harvesting and hardware noises. Digit. Commun. Netw. 2021, 7, 45–54. [Google Scholar] [CrossRef]
- Zhu, J.; Ng, D.W.K.; Wang, N.; Schober, R.; Bhargava, V.K. Analysis and Design of Secure Massive MIMO Systems in the Presence of Hardware Impairments. IEEE Trans. Wirel. Commun. 2017, 16, 2001–2016. [Google Scholar] [CrossRef] [Green Version]
- Guo, K.; An, K.; Zhang, B.; Huang, Y.; Zheng, G. Outage Analysis of Cognitive Hybrid Satellite-Terrestrial Networks with Hardware Impairments and Multi-Primary Users. IEEE Wirel. Commun. Lett. 2018, 7, 816–819. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Li, J.; Liu, Y.; Ding, Z.; Nallanathan, A. Residual Transceiver Hardware Impairments on Cooperative NOMA Networks. IEEE Trans. Wirel. Commun. 2020, 19, 680–695. [Google Scholar] [CrossRef]
- Deng, C.; Liu, M.; Li, X.; Liu, Y. Hardware Impairments Aware Full-Duplex NOMA Networks over Rician Fading Channels. IEEE Syst. J. 2021, 15, 2515–2518. [Google Scholar] [CrossRef]
- Masaracchia, A.; Nguyen, L.D.; Duong, T.Q.; Yin, C.; Dobre, O.A.; Garcia-Palacios, E. Energy-efficient and throughput fair resource allocation for ts-noma uav-assisted communications. IEEE Trans. Commun. 2020, 68, 7156–7169. [Google Scholar] [CrossRef]
- Li, X.; Wang, Q.; Liu, Y.; Tsiftsis, T.A.; Ding, Z.; Nallanathan, A. UAV-aided multi-way NOMA networks with residual hardware impairments. IEEE Wirel. Commun. Lett. 2020, 9, 1538–1542. [Google Scholar] [CrossRef]
- Tang, X.; An, K.; Guo, K.; Huang, Y. Outage analysis of non-orthogonal multiple access-based integrated satellite-terrestrial relay networks with hardware impairments. IEEE Access 2019, 7, 141258–141267. [Google Scholar] [CrossRef]
- Ono, F.; Ochiai, H.; Miura, R. A wireless relay network based on unmanned aircraft system with rate optimization. IEEE Trans. Wirel. Commun. 2016, 15, 7699–7708. [Google Scholar] [CrossRef]
- Simon, M.K.; Alouini, M.S. Digital Communication over Fading Channels; John Wiley & Sons: Hoboken, NJ, USA, 2005; Volume 95. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series and Products; Academic Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
- Yang, S.; Deng, Y.; Tang, X.; Ding, Y.; Zhou, J. Energy efficiency optimization for UAV-assisted backscatter communications. IEEE Commun. Lett. 2019, 23, 2041–2045. [Google Scholar] [CrossRef] [Green Version]
- Prudnikov, A.P.; Brychkov, Y.A.; Marichev, O.I. Integrals and Series, Volume 3: More Special Functions; Gordon and Breach: New York, NY, USA; London, UK, 1986; Volume 55. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monte Carlo Simulations Repeated | Iterations |
|---|---|
| Target rates | & |
| Power splitting factors | & |
| The hardware impairments level | |
| Path-loss factor | |
| The UAV’s altitude | |
| The radius round the trajectory | |
| The location of the ground users | |
| The UAV’s location circle angle | |
| Environment parameters | & |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duc, C.H.; Nguyen, S.Q.; Le, C.-B.; Khanh, N.T.V. Performance Evaluation of UAV-Based NOMA Networks with Hardware Impairment. Electronics 2022, 11, 94. https://doi.org/10.3390/electronics11010094
Duc CH, Nguyen SQ, Le C-B, Khanh NTV. Performance Evaluation of UAV-Based NOMA Networks with Hardware Impairment. Electronics. 2022; 11(1):94. https://doi.org/10.3390/electronics11010094
Chicago/Turabian StyleDuc, Chung Ho, Sang Quang Nguyen, Chi-Bao Le, and Ngo Tan Vu Khanh. 2022. "Performance Evaluation of UAV-Based NOMA Networks with Hardware Impairment" Electronics 11, no. 1: 94. https://doi.org/10.3390/electronics11010094
APA StyleDuc, C. H., Nguyen, S. Q., Le, C.-B., & Khanh, N. T. V. (2022). Performance Evaluation of UAV-Based NOMA Networks with Hardware Impairment. Electronics, 11(1), 94. https://doi.org/10.3390/electronics11010094