
Using Bluetooth Low Energy Technology to Perform ToF-Based Positioning




Abstract
:1. Introduction
2. A Bluetooth Low Energy Overview
3. Setup and Operation
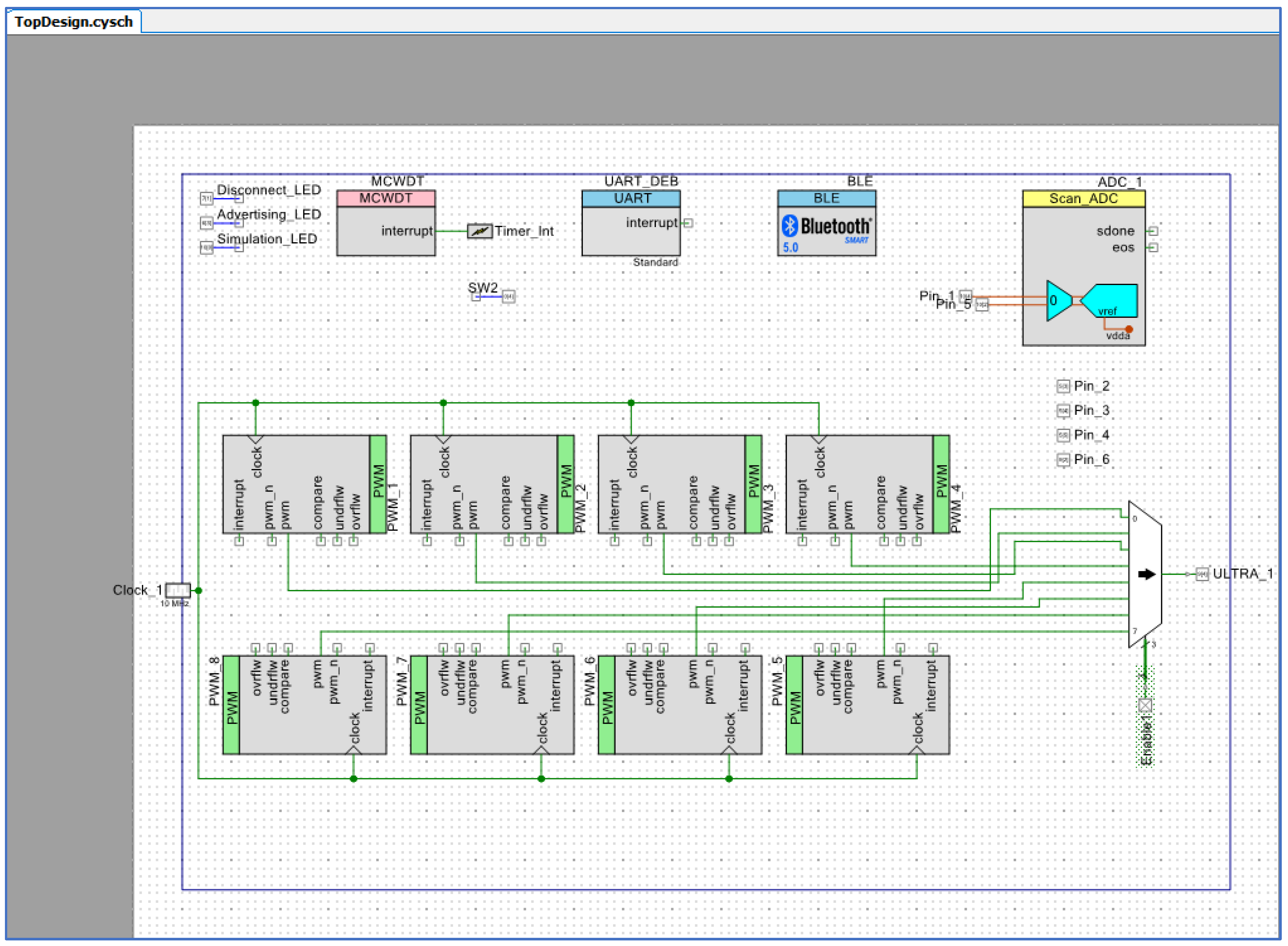
3.1. Wireless Triggering Using BLE
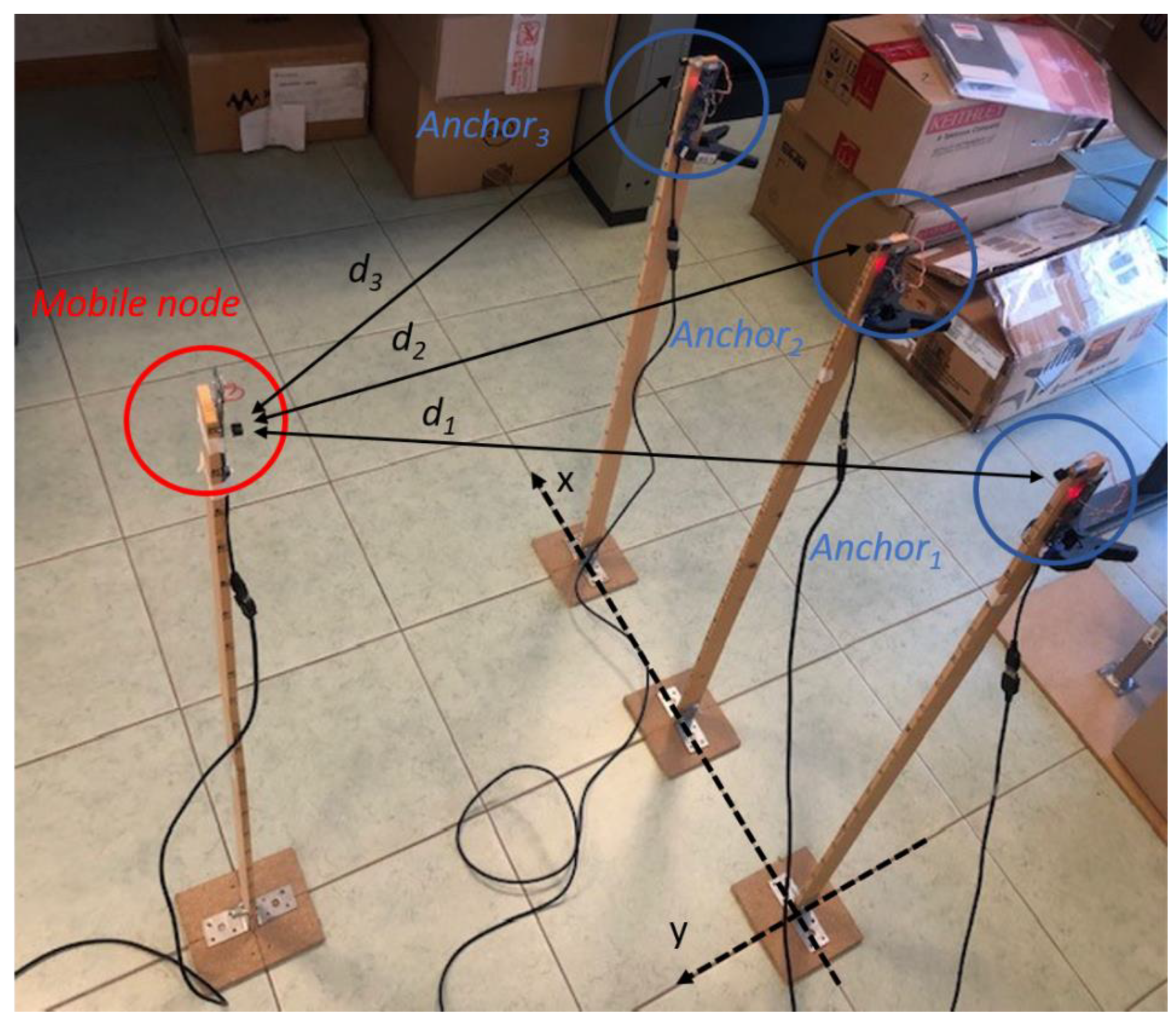
3.2. The Positioning Method: Principle and Operation
4. Results
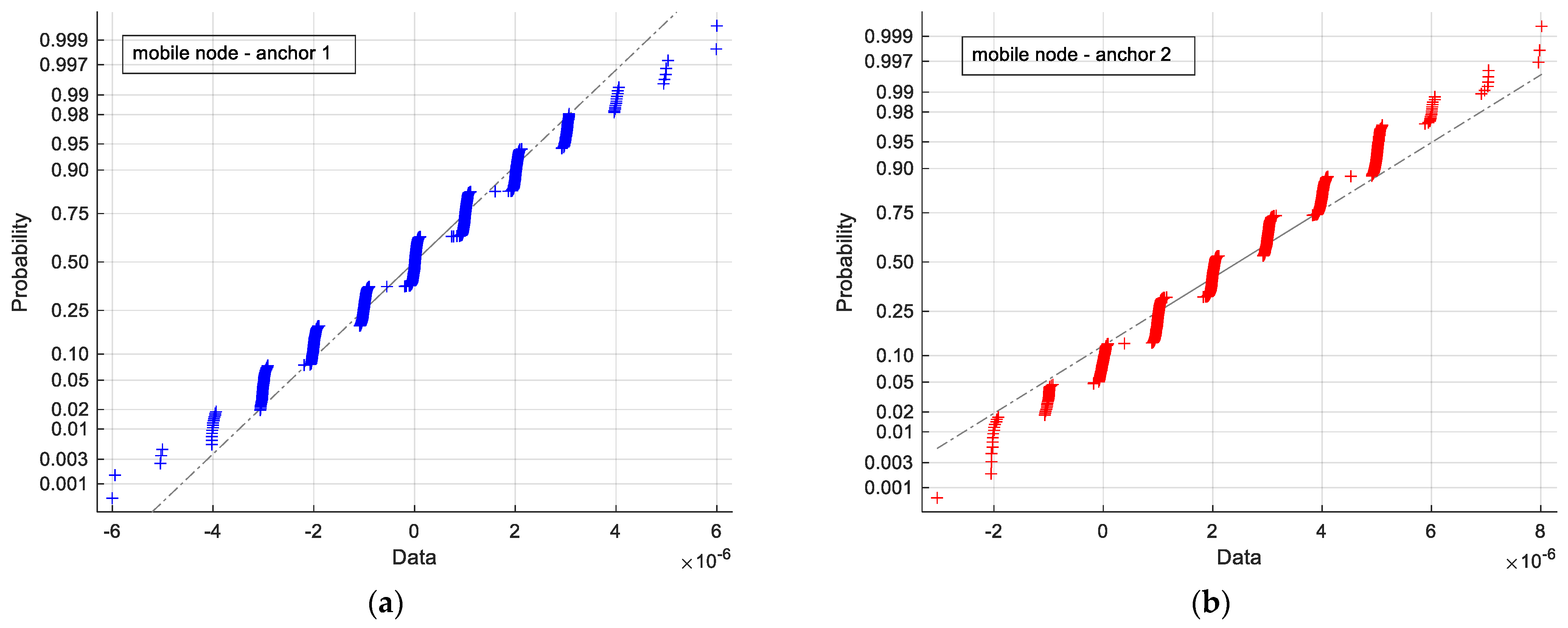
4.1. Time-Synchronization Analysis
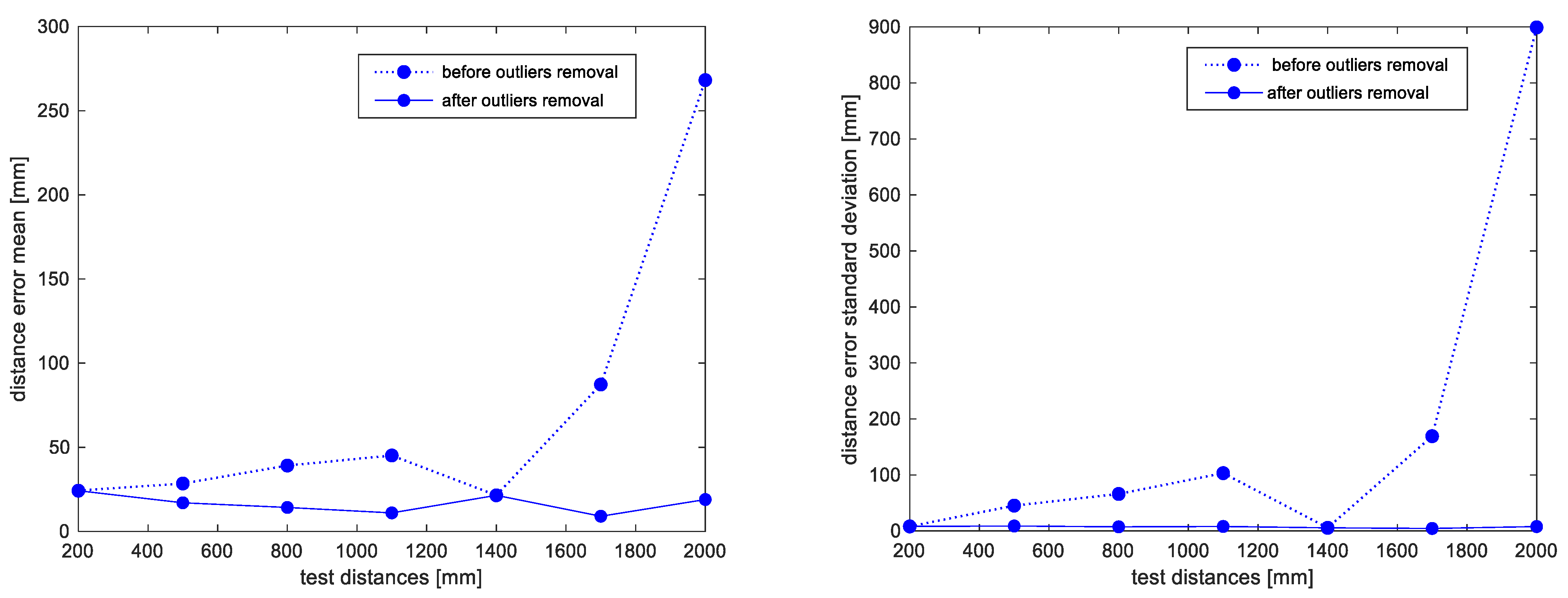
4.2. Distance Estimation
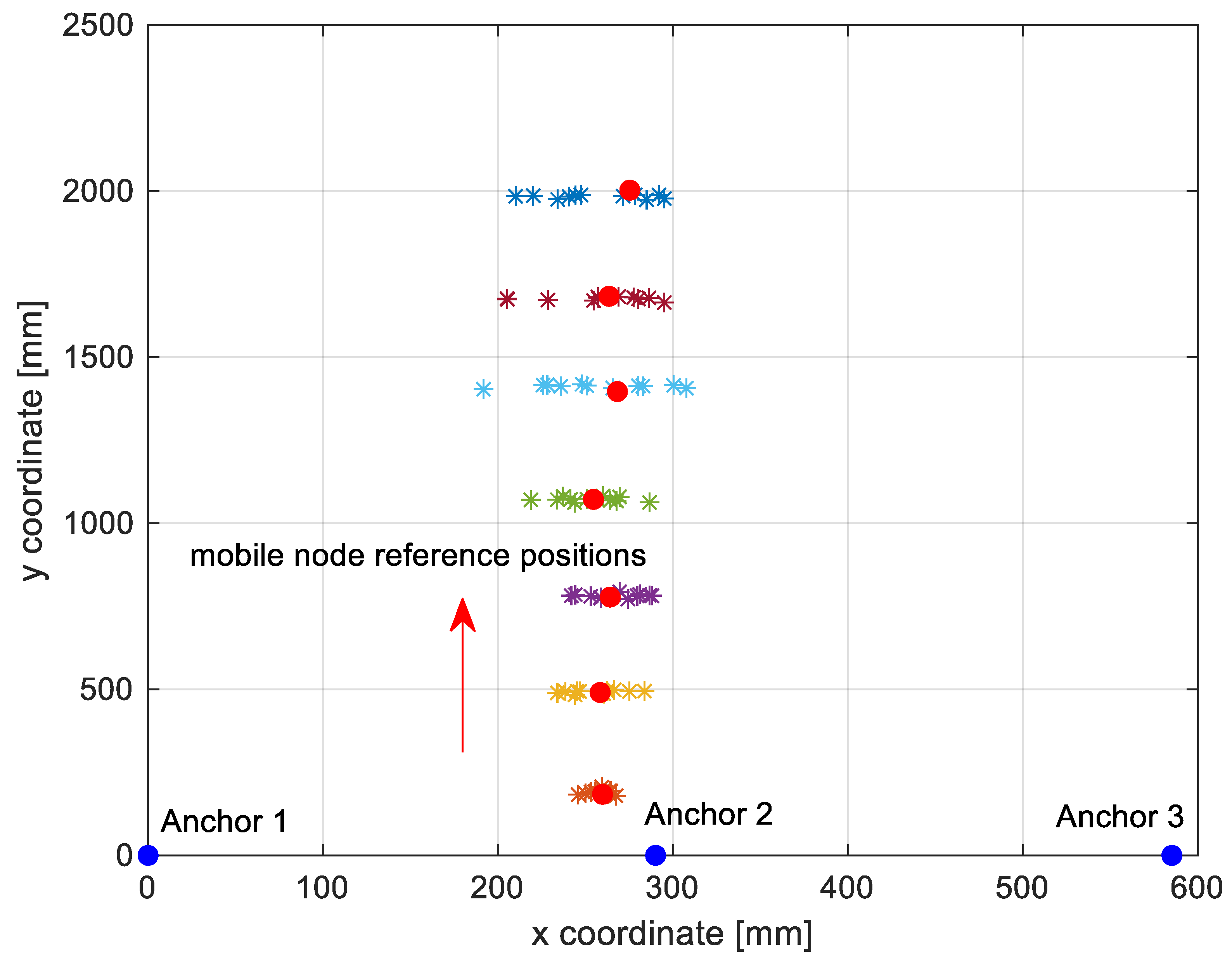
4.3. Positioning
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Macagnano, D.; Destino, G.; Abreu, G. Indoor Positioning: A Key Enabling Technology for Iot Applications. In Proceedings of the 2014 IEEE World Forum on Internet of Things (WF-IoT), Seoul, Korea, 6–8 March 2014; pp. 117–118. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P.; Plataniotis, K.N. Memoryless Techniques and Wireless Technologies for Indoor Localization with the Internet of Things. IEEE Internet Things J. 2020, 7, 10996–11005. [Google Scholar] [CrossRef]
- Monfared, S.; Copa, E.I.P.; de Doncker, P.; Horlin, F. AoA-Based Iterative Positioning of IoT Sensors with Anchor Selection in NLOS Environments. IEEE Trans. Veh. Technol. 2021, 70, 6211–6216. [Google Scholar] [CrossRef]
- Pascale, F.; Adinolfi, E.; Avagliano, M.; Giannella, V.; Salas, A. A Low Energy IoT Application Using Beacon for Indoor Localization. Appl. Sci. 2021, 11, 4902. [Google Scholar] [CrossRef]
- Mautz, R. Overview of current indoor positioning systems. Geod. Cartogr. 2009, 35, 18–22. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Medina, C.; Segura, J.C.; de La Torre, A. Ultrasound Indoor Positioning System Based on a Low-Power Wireless Sensor Network Providing Sub-Centimeter Accuracy. Sensors 2013, 13, 3501–3526. [Google Scholar] [CrossRef] [Green Version]
- Perez, M.C.; Gualda, D.; Villadangos, J.M.; Urena, J.; Pajuelo, P.; Diaz, E.; Garcia, E. Android Application for Indoor Positioning of Mobile Devices Using Ultrasonic Signals. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Diaz, E.; Perez, M.C.; Gualda, D.; Villadangos, J.M.; Urena, J.; Garcia, J.J. Ultrasonic Indoor Positioning for Smart Environments: A Mobile Application. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 280–285. [Google Scholar] [CrossRef]
- Comuniello, A.; de Angelis, A.; de Angelis, G.; Moschitta, A. Ultrasound Time of Flight Based Positioning Using the Bluetooth Low Energy Protocol. In Proceedings of the 2019 IEEE International Symposium on Measurements & Networking (M&N), Catania, Italy, 8–10 July 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Comuniello, A.; Moschitta, A.; de Angelis, A. Ultrasound TDoA Positioning Using the Best Linear Unbiased Estimator and Efficient Anchor Placement. IEEE Trans. Instrum. Meas. 2020, 69, 2477–2486. [Google Scholar] [CrossRef]
- Santoni, F.; de Angelis, A.; Moschitta, A.; Carbone, P. MagIK: A Hand-Tracking Magnetic Positioning System Based on a Kinematic Model of the Hand. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Milano, F.; Cerro, G.; Santoni, F.; de Angelis, A.; Miele, G.; Rodio, A.; Moschitta, A.; Ferrigno, L.; Carbone, P. Parkinson’s Disease Patient Monitoring: A Real-Time Tracking and Tremor Detection System Based on Magnetic Measurements. Sensors 2021, 21, 4196. [Google Scholar] [CrossRef]
- Ferrigno, L.; Laracca, M.; Milano, F.; Cerro, G.; Bellitti, P.; Serpelloni, M.; Piedrafita, O.C. Magnetic Localization System for Short-Range Positioning: A Ready-to-Use Design Tool. IEEE Trans. Instrum. Meas. 2021, 70, 1–9. [Google Scholar] [CrossRef]
- Subedi, S.; Pyun, J.-Y. A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef]
- Santinelli, G.; Giglietti, R.; Moschitta, A. Self-Calibrating Indoor Positioning System Based on Zigbee® Devices. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC 2009), Singapore, 5–7 May 2009; pp. 1205–1210. [Google Scholar]
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-Based Indoor Localization with Bluetooth Low Energy Beacons. Sensors 2016, 16, 596. [Google Scholar] [CrossRef] [Green Version]
- Paterna, V.C.; Augé, A.C.; Aspas, J.P.; Bullones, M.A.P. A Bluetooth Low Energy Indoor Positioning System with Channel Diversity, Weighted Trilateration and Kalman Filtering. Sensors 2017, 17, 2927. [Google Scholar] [CrossRef] [Green Version]
- Zuo, Z.; Liu, L.; Zhang, L.; Fang, Y. Indoor Positioning Based on Bluetooth Low-Energy Beacons Adopting Graph Optimization. Sensors 2018, 18, 3736. [Google Scholar] [CrossRef] [Green Version]
- Ke, H.; Ke, H.; Xuecheng, D. A Hybrid Method to Improve the BLE-Based Indoor Positioning in a Dense Bluetooth Environment. Sensors 2019, 19, 424. [Google Scholar]
- Wang, B.; Wang, Y.; Qiu, X.; Shen, Y. BLE Localization with Polarization Sensitive Array. IEEE Wirel. Commun. Lett. 2021, 10, 1014–1017. [Google Scholar] [CrossRef]
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Chen, R.; Chen, L.; Zheng, X.; Wu, D.; Li, W.; Wu, Y. A Novel 3-D Indoor Localization Algorithm Based on BLE and Multiple Sensors. IEEE Internet Things J. 2021, 8, 9359–9372. [Google Scholar] [CrossRef]
- Bai, L.; Ciravegna, F.; Bond, R.; Mulvenna, M. A Low Cost Indoor Positioning System Using Bluetooth Low Energy. IEEE Access 2020, 8, 136858–136871. [Google Scholar] [CrossRef]
- Mackey, A.; Spachos, P.; Song, L.; Plataniotis, K.N. Improving BLE Beacon Proximity Estimation Accuracy Through Bayesian Filtering. IEEE Internet Things J. 2020, 7, 3160–3169. [Google Scholar] [CrossRef] [Green Version]
- Indoor Positioning Systems Based on BLE Beacons. Available online: https://locatify.com/blog/indoor-positioning-systems-ble-beacons/ (accessed on 7 November 2021).
- Morgado, F.; Martins, P.; Caldeira, F. Beacons positioning detection, a novel approach. Procedia Comput. Sci. 2019, 151, 23–30. [Google Scholar] [CrossRef]
- iBeacon. Available online: https://developer.apple.com/ibeacon/ (accessed on 12 April 2019).
- Valencia-Velasco, J.; Longoria-Gandara, O.; Aldana-Lopez, R.; Pizano-Escalante, L. Low-Complexity Maximum-Likelihood Detector for IoT BLE Devices. IEEE Internet Things J. 2020, 7, 4737–4745. [Google Scholar] [CrossRef]
- Wang, W.; Marelli, D.; Fu, M. Fingerprinting-Based Indoor Localization Using Interpolated Preprocessed CSI Phases and Bayesian Tracking. Sensors 2020, 20, 2854. [Google Scholar] [CrossRef] [PubMed]
- Cengiz, K. Comprehensive Analysis on Least-Squares Lateration for Indoor Positioning Systems. IEEE Internet Things J. 2021, 8, 2842–2856. [Google Scholar] [CrossRef]
- Murata Manufacturing Co., Ltd. MA40S4S/MA40S4R Ultrasonic Transducers Overview. Available online: https://www.murata.com/en-us/products/sensor/overview/item/ma40s4 (accessed on 7 November 2021).
- Analog Bottom Port Microphone with Frequency Response up to 80 kHz for Ultrasound Analysis and Predictive Maintenance Applications. Available online: https://www.st.com/en/mems-and-sensors/imp23absu.html (accessed on 7 November 2021).
- Wang, H.; Ma, Y.; Yang, H.; Jiang, H.; Ding, Y.; Xie, H. MEMS Ultrasound Transducers for Endoscopic Photoacoustic Imaging Applications. Micromachines 2020, 11, 928. [Google Scholar] [CrossRef] [PubMed]
- Marcaletti, A.; Rea, M.; Giustiniano, D.; Lenders, V.; Fakhreddine, A. Filtering Noisy 802.11 Time-of-Flight Ranging Measurements. In Proceedings of the 10th ACM International on Conference on emerging Networking Experiments and Technologies, Sydney, Australia, 2–5 December 2014; pp. 13–20. [Google Scholar] [CrossRef] [Green Version]
- Pascacio, P.; Casteleyn, S.; Torres-Sospedra, J.; Lohan, E.; Nurmi, J. Collaborative Indoor Positioning Systems: A Systematic Review. Sensors 2021, 21, 1002. [Google Scholar] [CrossRef]
- Su, W.; Akyildiz, I. Time-diffusion synchronization protocol for wireless sensor networks. IEEE/ACM Trans. Netw. 2005, 13, 384–397. [Google Scholar] [CrossRef]
- Ferrigno, L.; Paciello, V.; Pietrosanto, A. Experimental Characterization of Synchronization Protocols for Instrument Wireless Interface. IEEE Trans. Instrum. Meas. 2010, 60, 1037–1046. [Google Scholar] [CrossRef]
- Kosanovic, M.R.; Stojcev, M.K. Delay Compensation Method for Time Synchronization in Wireless Sensor Networks. In Proceedings of the 10th International Conference on Telecommunication in Modern Satellite Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 5–8 October 2011; pp. 623–629. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, L.; Bai, Y.; Sun, Y. Cluster-Based Consensus Time Synchronization for Wireless Sensor Networks. IEEE Sensors J. 2015, 15, 1404–1413. [Google Scholar] [CrossRef]
- Cena, G.; Scanzio, S.; Valenzano, A.; Zunino, C. Implementation and Evaluation of the Reference Broadcast Infrastructure Synchronization Protocol. IEEE Trans. Ind. Inform. 2015, 11, 801–811. [Google Scholar] [CrossRef]
- Wang, Z.; Zeng, P.; Zhou, M.; Li, D.; Wang, J. Cluster-Based Maximum Consensus Time Synchronization for Industrial Wireless Sensor Networks. Sensors 2017, 17, 141. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Yuan, Y.; Bi, Y. A Design of a Time Synchronization Protocol Based on Dynamic Route and Forwarding Certification. Sensors 2020, 20, 5061. [Google Scholar] [CrossRef] [PubMed]
- Chalapathi, G.S.S.; Chamola, V.; Gurunarayanan, S.; Sikdar, B. E-SATS: An Efficient and Simple Time Synchronization Protocol for Cluster- Based Wireless Sensor Networks. IEEE Sens. J. 2019, 19, 10144–10156. [Google Scholar] [CrossRef]
- Wang, H.; Shao, L.; Li, M.; Wang, B.; Wang, P. Estimation of Clock Skew for Time Synchronization Based on Two-Way Message Exchange Mechanism in Industrial Wireless Sensor Networks. IEEE Trans. Ind. Inform. 2018, 14, 4755–4765. [Google Scholar] [CrossRef]
- Huan, X.; Kim, K.S.; Lee, S.; Lim, E.G.; Marshall, A. A Beaconless Asymmetric Energy-Efficient Time Synchronization Scheme for Resource-Constrained Multi-Hop Wireless Sensor Networks. IEEE Trans. Commun. 2020, 68, 1716–1730. [Google Scholar] [CrossRef] [Green Version]
- Asgarian, F.; Najafi, K. BlueSync: Time Synchronization in Bluetooth Low Energy with Energy Efficient Calculations. IEEE Internet Things J. 2021. [Google Scholar] [CrossRef]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-Sync Protocol for Sensor Networks. In Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The Flooding Time Synchronization Protocol. In Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49. [Google Scholar]
- Sridhar, S.; Misra, P.; Gill, G.S.; Warrior, J. Cheepsync: A time synchronization service for resource constrained bluetooth le advertisers. IEEE Commun. Mag. 2015, 54, 136–143. [Google Scholar] [CrossRef] [Green Version]
- Bluetooth® Specifications-The Building Blocks of All Bluetooth Devices. Available online: https://www.bluetooth.com/specifications/ (accessed on 7 November 2021).
- Bluetooth® Specifications-Specifications List. Available online: https://www.bluetooth.com/specifications/specs/ (accessed on 7 November 2021).
- Cypress PSoC® 6 BLE Datasheet. Available online: https://www.cypress.com/file/385916/download (accessed on 11 March 2021).
- PSoC™ Creator. Available online: https://www.cypress.com/products/psoc-creator-integrated-design-environment-ide (accessed on 7 November 2021).
- WavePro HD Oscilloscopes. Available online: https://teledynelecroy.com/oscilloscope/wavepro-hd-oscilloscope (accessed on 19 December 2021).
- De Angelis, A.; Moschitta, A.; Carbone, P.; Calderini, M.; Neri, S.; Borgna, R.; Peppucci, M. Design and Characterization of a Portable Ultrasonic Indoor 3-D Positioning System. IEEE Trans. Instrum. Meas. 2015, 64, 2616–2625. [Google Scholar] [CrossRef]
- Rivard, F.; Bisson, J.; Michaud, F.; Létourneau, D. Ultrasonic Relative Positioning for Multi-Robot Systems. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Considered Couples of Nodes | Time-Synchronization Delay Mean [s] | Time-Synchronization Delay Standard Deviation [s] | ||
|---|---|---|---|---|
| Outliers | No-Outliers | Outliers | No-Outliers | |
| mobile node-anchor 1 | 1.2864 × 10−6 | 4.0495 × 10−8 | 2.7896 × 10−5 | 1.6908 × 10−6 |
| mobile node-anchor 2 | 1.5992 × 10−6 | 2.3773 × 10−6 | 3.8217 × 10−5 | 1.7745 × 10−6 |
| mobile node-anchor 3 | 3.0095 × 10−7 | 9.5101 × 10−7 | 3.9568 × 10−5 | 1.7647 × 10−6 |
| Considered True Distances [mm] | Distance Error Mean [mm] | Distance Error Standard Deviation [mm] | ||
|---|---|---|---|---|
| Outliers | No-Outliers | Outliers | No-Outliers | |
| 200 | 24 | 24 | 8 | 8 |
| 500 | 28 | 17 | 45 | 9 |
| 800 | 39 | 14 | 66 | 7 |
| 1100 | 45 | 11 | 103 | 8 |
| 1400 | 21 | 21 | 5 | 5 |
| 1700 | 87 | 9 | 169 | 4 |
| 2000 | 268 | 18 | 899 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Comuniello, A.; De Angelis, A.; Moschitta, A.; Carbone, P. Using Bluetooth Low Energy Technology to Perform ToF-Based Positioning. Electronics 2022, 11, 111. https://doi.org/10.3390/electronics11010111
Comuniello A, De Angelis A, Moschitta A, Carbone P. Using Bluetooth Low Energy Technology to Perform ToF-Based Positioning. Electronics. 2022; 11(1):111. https://doi.org/10.3390/electronics11010111
Chicago/Turabian StyleComuniello, Antonella, Alessio De Angelis, Antonio Moschitta, and Paolo Carbone. 2022. "Using Bluetooth Low Energy Technology to Perform ToF-Based Positioning" Electronics 11, no. 1: 111. https://doi.org/10.3390/electronics11010111
APA StyleComuniello, A., De Angelis, A., Moschitta, A., & Carbone, P. (2022). Using Bluetooth Low Energy Technology to Perform ToF-Based Positioning. Electronics, 11(1), 111. https://doi.org/10.3390/electronics11010111