1. Introduction
Logistics is becoming an increasingly important activity globally, with an estimated annual industry value of EUR 5.73 trillion in 2020. The value has dropped since the beginning of the COVID-19 pandemic in 2020, but it is expected to rise to EUR 6.88 trillion by the year 2024 [
1]. Intralogistics (internal logistics), including the warehousing processes, is one of the largest activities in Logistics, accounting for around 20.5% of the total Logistics market in 2018, indicating the strong importance of Intralogistics in the economy [
2].
Intralogistics covers all technical systems, services and operations concerning the material and information flow inside production processes. Processes inside the Intralogistics domain are crucial to managing material and information flow along the whole supply chain, as they ensure reliable and predictable material and information flow [
3]. Warehouses are important in the economy due to: (1) the uncoordinated in- and out-flow of goods, (2) the unpredictable dynamics in production and consumption, (3) the reduction of transport costs, and (4) to increase the level of satisfaction of end-users. The warehouse is the place where the processes of receiving, storing, ordering and dispatching goods are carried out [
4].
Faber et al. [
5] note that warehousing is a critical activity in the supply chain that can create a competitive advantage in terms of customer service, reduction of order-to-fill times, and cost. Today, most warehouses use WMS to ensure product traceability, which is the first step in organizing and optimizing warehouse operations.
A WMS is an IT solution that provides, stores, and reports the information necessary to manage the flow of material efficiently within a warehouse from the moment a request is issued to the execution of the delivery. The benefits of using a WMS include increased productivity, reduced inventory, better space use, error reduction, and better customer support, due to the traceability of products [
5].
While WMS are sufficient in terms of controlling and organizing the warehouse itself and have a positive impact on the quality of the warehouse’s operation and performance, they often do not reflect the actual condition of the warehouse. The accuracy of the WMS data still relies on the human factor, as the data are processed manually (scanning the correct bar/Radio Frequency Identification (RFID) code associated with product and location, etc.) [
6]. Products may have been deposited in the wrong place, or may have been booked incorrectly. The WMS status information itself is often incomplete, incorrect, or even misleading. A system that does not know the actual status can lead to incorrect commands, e.g., sending several workers with forklifts to the same place, where a collision or congestion can occur [
7].
Therefore, those systems should be upgraded with advanced technologies that provide reliable and accurate information, mostly independent of the human factor. Halawa et al. [
7] note that the latter is possible using Real-Time Location System (RTLS) technology, a subset of IPS. A large study has been examined, showing that the combined use of WMS and RTLS can improve the quality of the data obtained, improve the management of the warehouse, and overall improve warehouse safety and operational efficiency significantly. The authors also point out that several unique analyses could be performed based on the gathered data [
7].
IPS work indoors, where satellite positioning systems (GPS, Galileo, Glonass) fail to provide (accurate) location of the subject in question. Furthermore, IPS technology can also be used for outdoor positioning, although the same technology used inside and outside may give different results [
8]. IPS are used to determine the current location of (1) an object (e.g., a forklift truck), (2) an industry item (a tote or a pallet), or (3) a person (order-picker) in warehouse environments [
9]. An IPS consists of transmitters located on the observed subject and a wireless signal reader that detects and reads the received signals. The location of transmitters and receivers can be swapped, which depends on the type of application. Various wireless technologies are used to communicate between transmitters and readers. The most popular are Ultra-Wideband (UWB), Wireless Fidelity (Wi-Fi), Bluetooth, light, and active/passive RFID systems [
10]. Visible Light Communication (VLC) is gaining increasing attention, since its high data rate, security, no interference with Radio Frequency (RF) spectrum and high resolution [
11] make it an appropriate choice for localization application.
By placing the reader in fixed positions within an environment (e.g., a warehouse), the location of mobile transponders can be determined by analyzing changes in signal properties (delay, attenuation, phase changes) and data exchange between the reader and the transponder [
10]. Sophisticated mathematical and heuristic methods should be used to process highly unstable and noisy signals coming from the transmitters [
12].
IPS that provide the information of location in real-time are called Real-Time Location Systems (RTLS). They are also being used increasingly in medical environments (tracking patients and seniors [
13], expensive equipment [
14]), large shopping malls [
15], sports [
16], etc. However, highly accurate RTLS, with localization error less than 20 cm, covering large areas, such as warehouses, are usually expensive and economically unfeasible for manually operated warehousing systems. Usually, such systems intended for high precision localization are based on UWB technology [
10]. Piccinni et al. [
17] demonstrated that accuracy of under 2 cm can be achieved using the Time Difference Of Arrival (TDOA) positioning technique coupled with Orthogonal Frequency Division Modulation (OFDM). A few-centimeter accuracy can also be achieved with VLC technology [
18,
19] on account of the more expensive hardware and computational setups. However, as a drawback of VLC technology, constant line-of-sight (LOS) is necessary for correct operation, coupled with the demand that light sources must stay on all the time [
20].
A more cost-effective solution that still provides enough information about subject location can be realized with technologies like Wi-Fi and Bluetooth. However, Wi-Fi and Bluetooth technologies are less appropriate for accurate localization, due to heavy influences from electromagnetic (EM) sources, causing interference to signal properties [
21,
22,
23].
Several attempts have been made to reduce the localization error of the Bluetooth RTLS, yet none of them reduced the localization error to less than 1.5 m in the warehouse environment [
9].
This paper proposes a prototype of IPS, based on BLE technology. The proposed solution does not provide accurate real-time location of the observed subject at any time, but instead records passings, or arrival signals, at the BLE transmitter area in real time. It eliminates the need for the expensive hardware needed for accurate localization associated with UWB technology and the complex setup related to Wi-Fi technology. In addition, direct LOS is not necessary, contrary to VLC technology. Compared to RFID technology, it uses far less energy and is easier to operate, due to the absence of large external antennas associated with passive RFID systems. In addition, the Bluetooth transmitter(s) and the reader(s) can be battery powered.
The proposed IPS is capable of accurate event detection used for providing near real-time data of subject movement in manually operated warehouses (e.g., smaller retail businesses). Using the developed solution and additional analysis of the acquired data, more efficient order-picker routes, material flow analysis, order-picker congestion, and overall efficiency can be achieved. Accurate event detection is achieved using a Nature-Inspired Optimization Algorithm (NIA) for setting a near-optimal threshold for a measured data filter, which eliminates all measurements below the set threshold. The system is designed to be as automatic as possible, with very few parameter settings. The user is guided through the process of calibration using a straight-forward graphical interface. All the developed code is available upon user request, as the proposed IPS is merely a framework that can be adapted freely to meet specific user requirements.
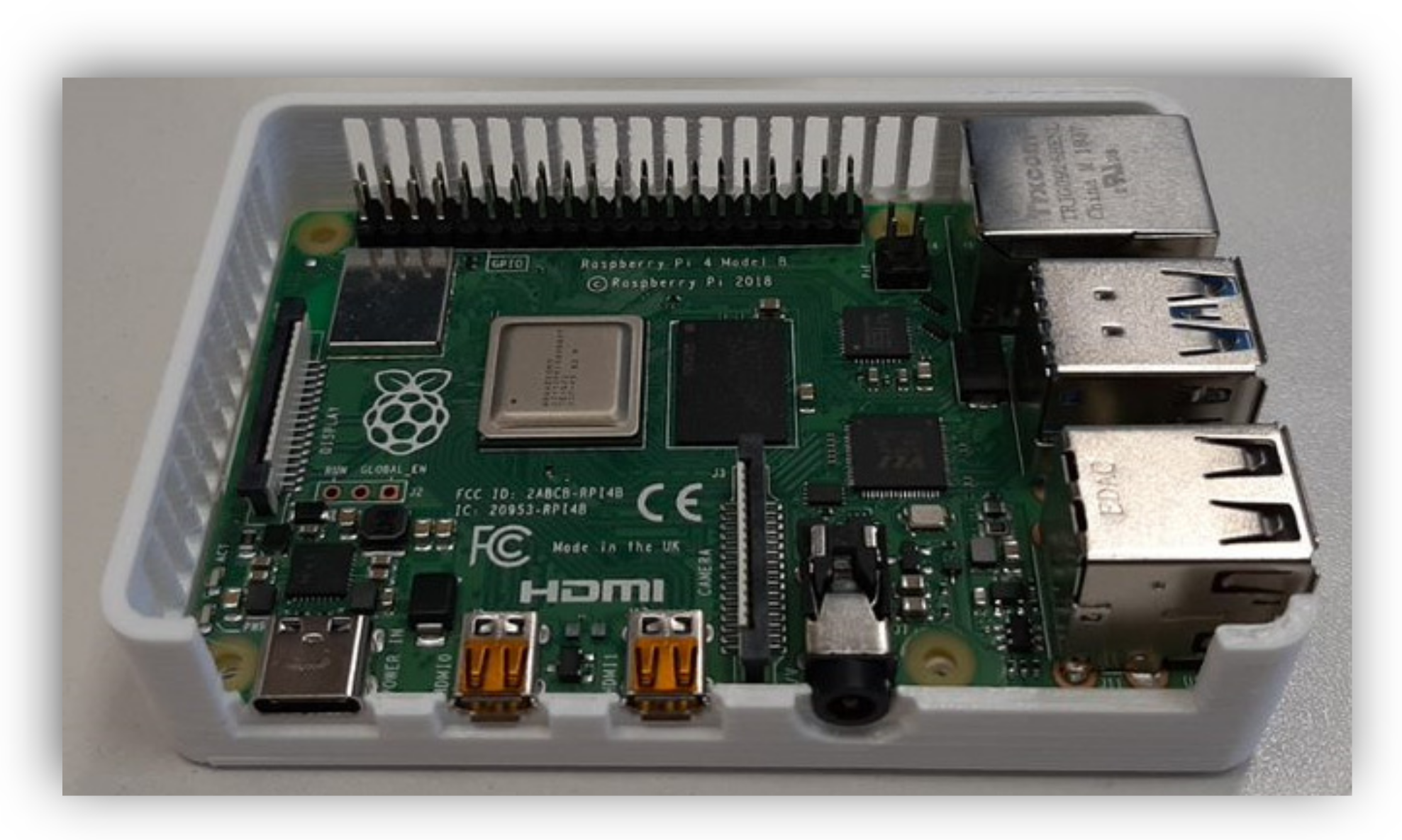
The authors expose four major contributions to the field of Bluetooth-based IPS: (1) an automatic calibration system that requires only a small intervention due to the automatic peak finding procedure using the Particle Swarm Optimization (PSO) algorithm, (2) accurate event detection with a very low false detection rate, (3) simple implementation of the peak detection procedure, capable of running on low-power hardware (such as Raspberry Pi), and (4) decentralized architecture, which allows data to be processed locally, and, consequently, there are no server costs. Only a final location and timestamp are posted into the database.
The paper is organized as follows. A general overview of BLE-based IPS and state-of-the art of related solutions is provided in
Section 2. Emphasis is placed on BLE-based IPS used especially in warehouse environments. In addition, a short overview will be provided of NIAs used in improving IPS technology. The software and hardware setup of the proposed system is presented in
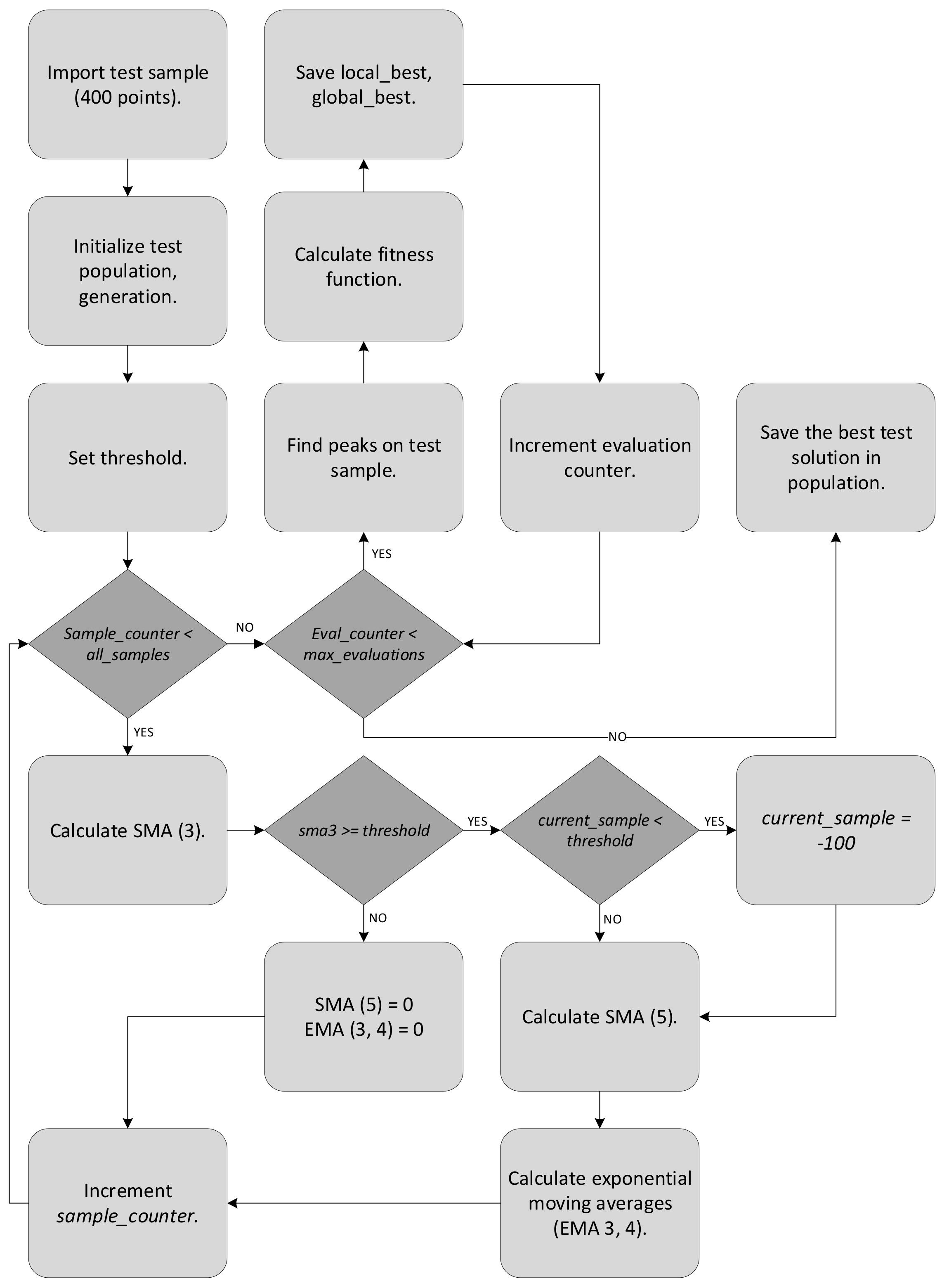
Section 3. The PSO algorithm for determining optimal threshold value for the measured data filter, programmed in MATLAB, will be discussed, along with the used evaluation protocols and layout of the testing area. The results of the proposed IPS in three-fold tests are presented in
Section 4: (1) processing time evaluation, (2) beacon calibration tool evaluation, and (3) IPS real-time localization accuracy. In conclusion, pointers are provided to future work.
4. Results
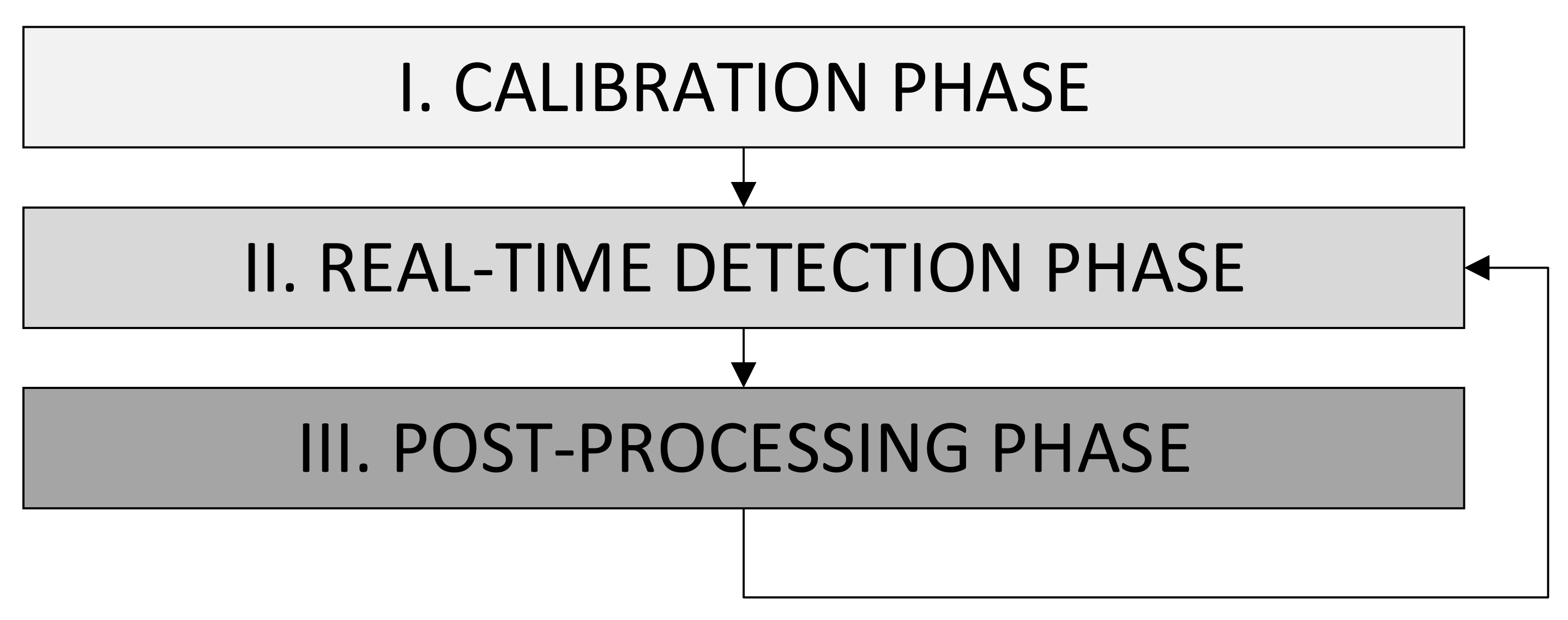
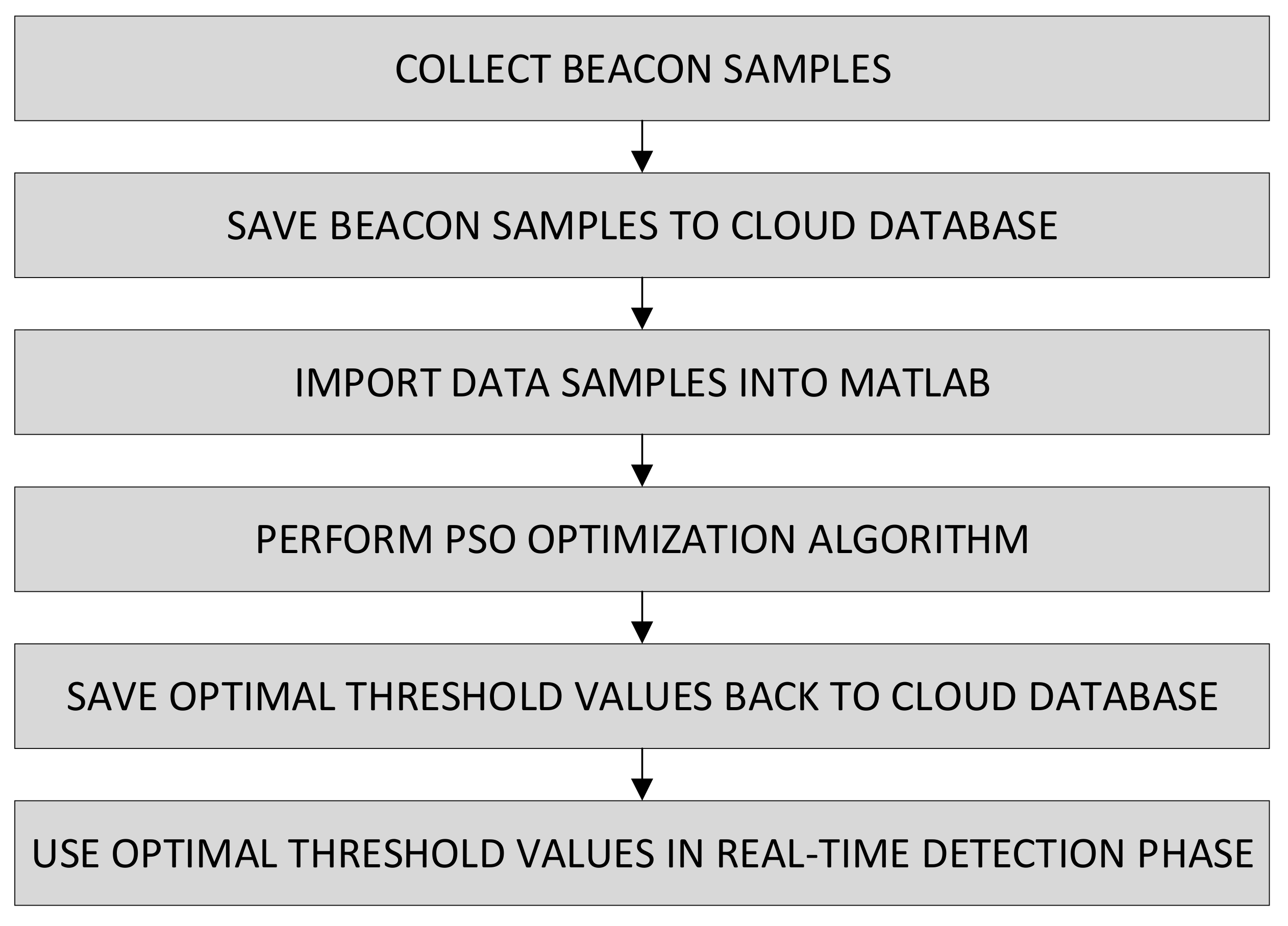
The results from the proposed IPS evaluation are presented in the following section. The processing times for the on-line localization on Raspberry Pi are evaluated first. Second, based on the samples collected during the calibration phase, a calibration was performed for the selected beacons. This was achieved using the custom developed Beacon Calibration Tool in MATLAB, separately for each beacon orientation. Finally, real-time localization accuracy was elaborated to validate the correct operation of the IPS.
4.1. Processing Time Evaluation
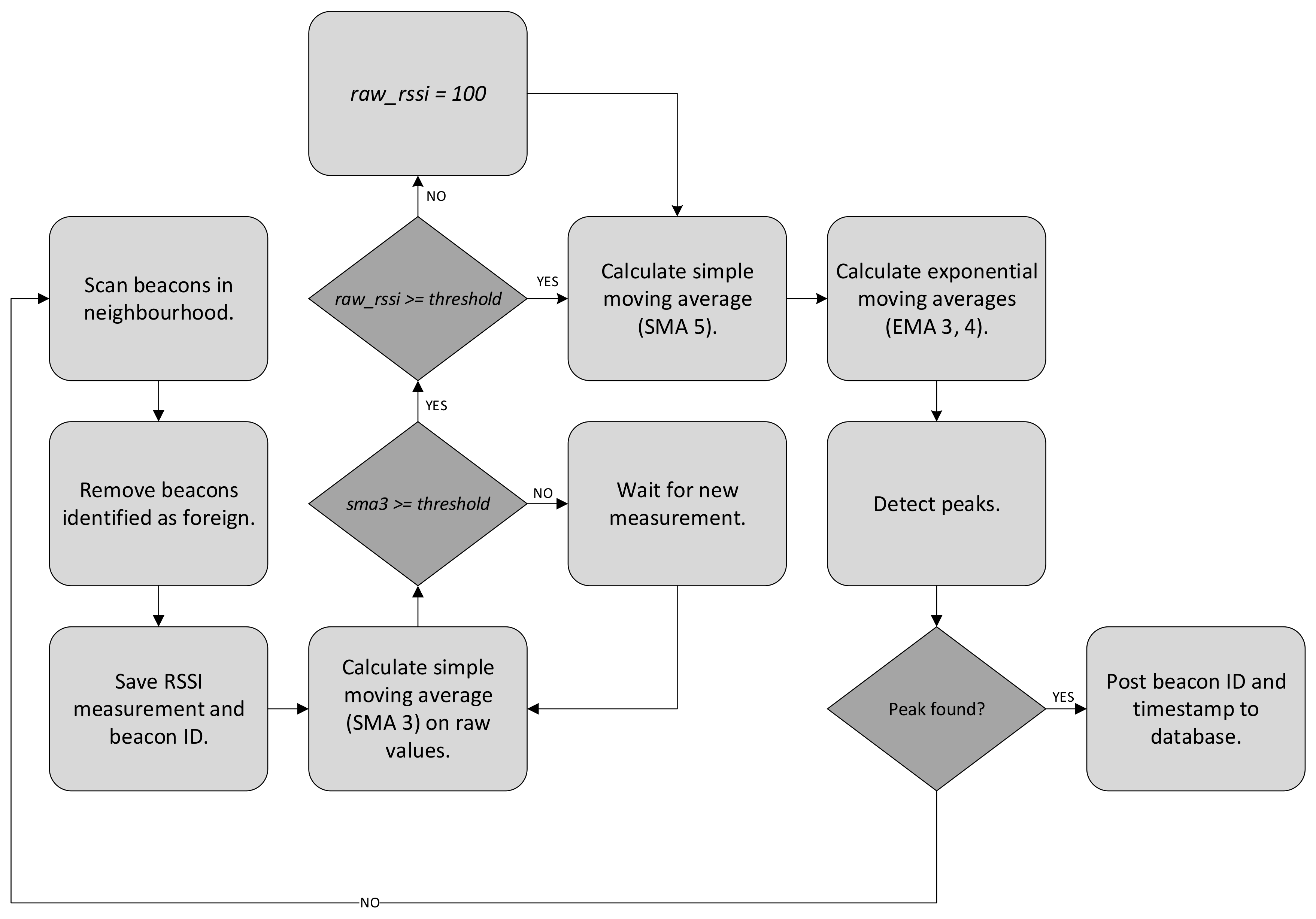
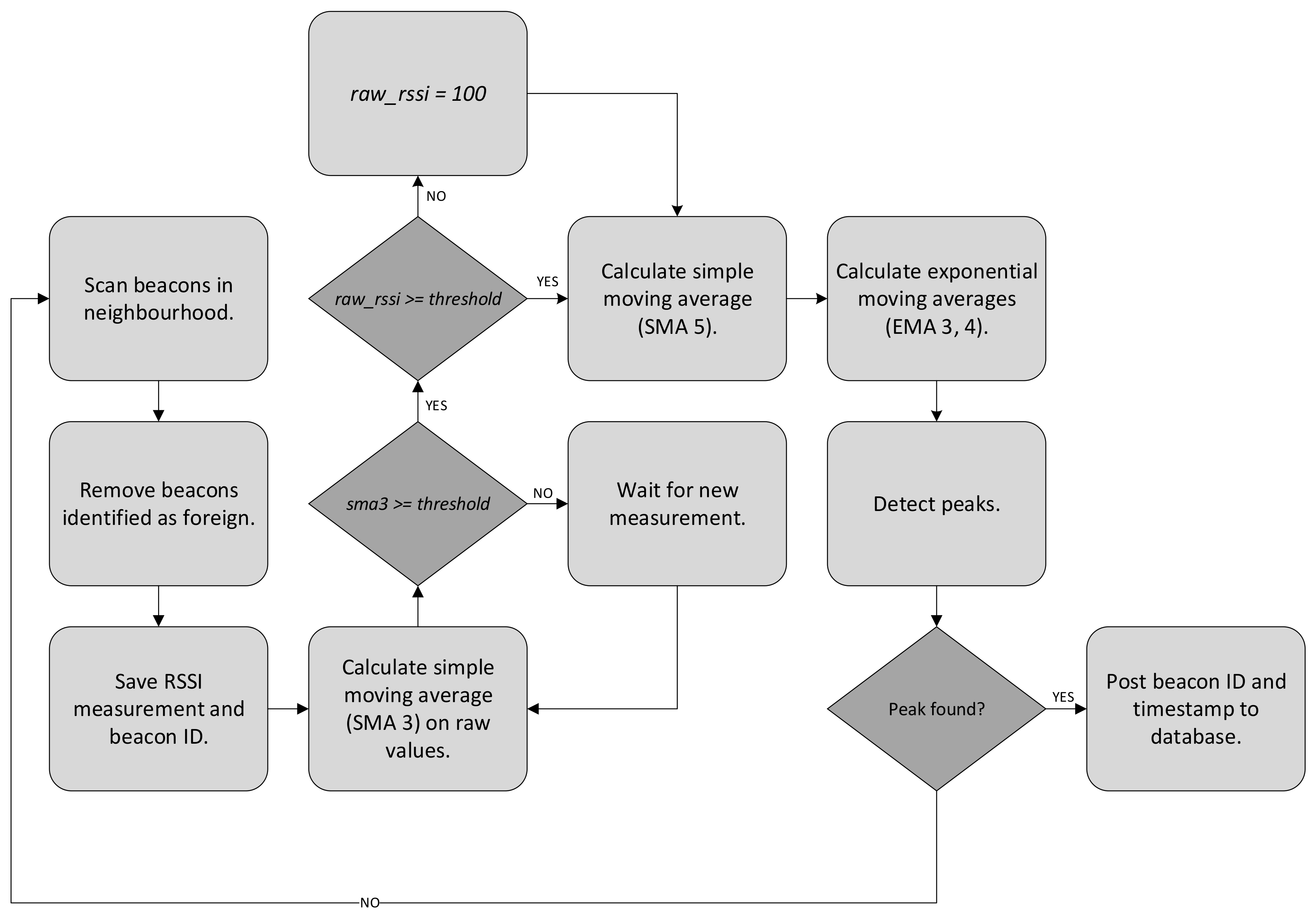
The scan interval of Raspberry Pi was set to 100 ms. This means that, during this time, the Bluetooth receiver listens to all beacons which are in the near vicinity and saves the incoming data for processing. After the scanning procedure, the data are processed according to the phases presented in
Section 3. The results of processing time evaluation showed that the localization procedure (calculation of different filters and peak detection) for the six beacons used in the experiment takes approximately 3 ms. Adding more beacons means that the scan interval increases, which may lead to lower real-time detection accuracy. The total processing time with a scan rate of T
s = 100 ms takes T
p = 160–175 ms before a new scan is initialized. The larger portion of the processing time (57–72 ms) is accounted for tasks instated by the BLE library.
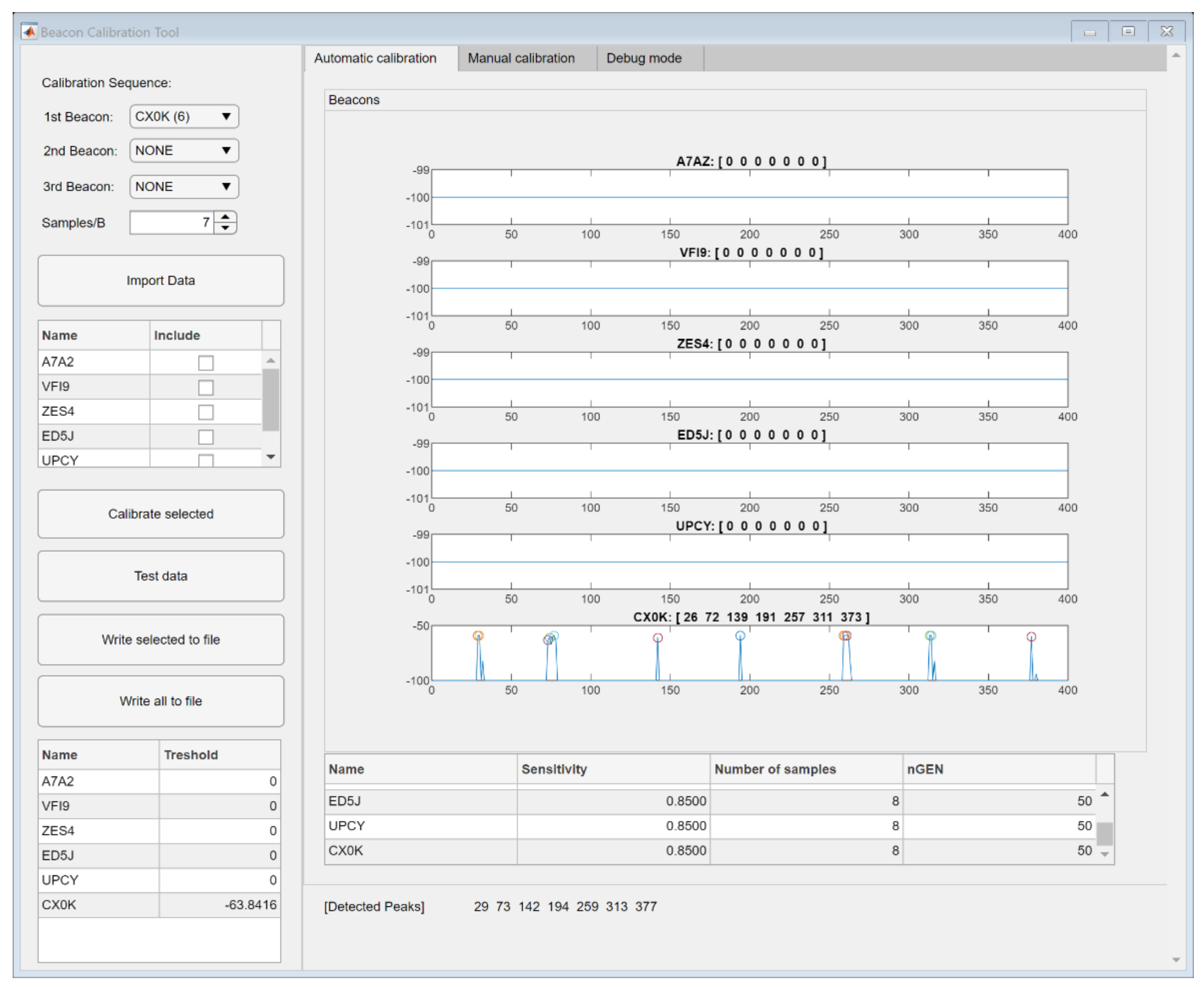
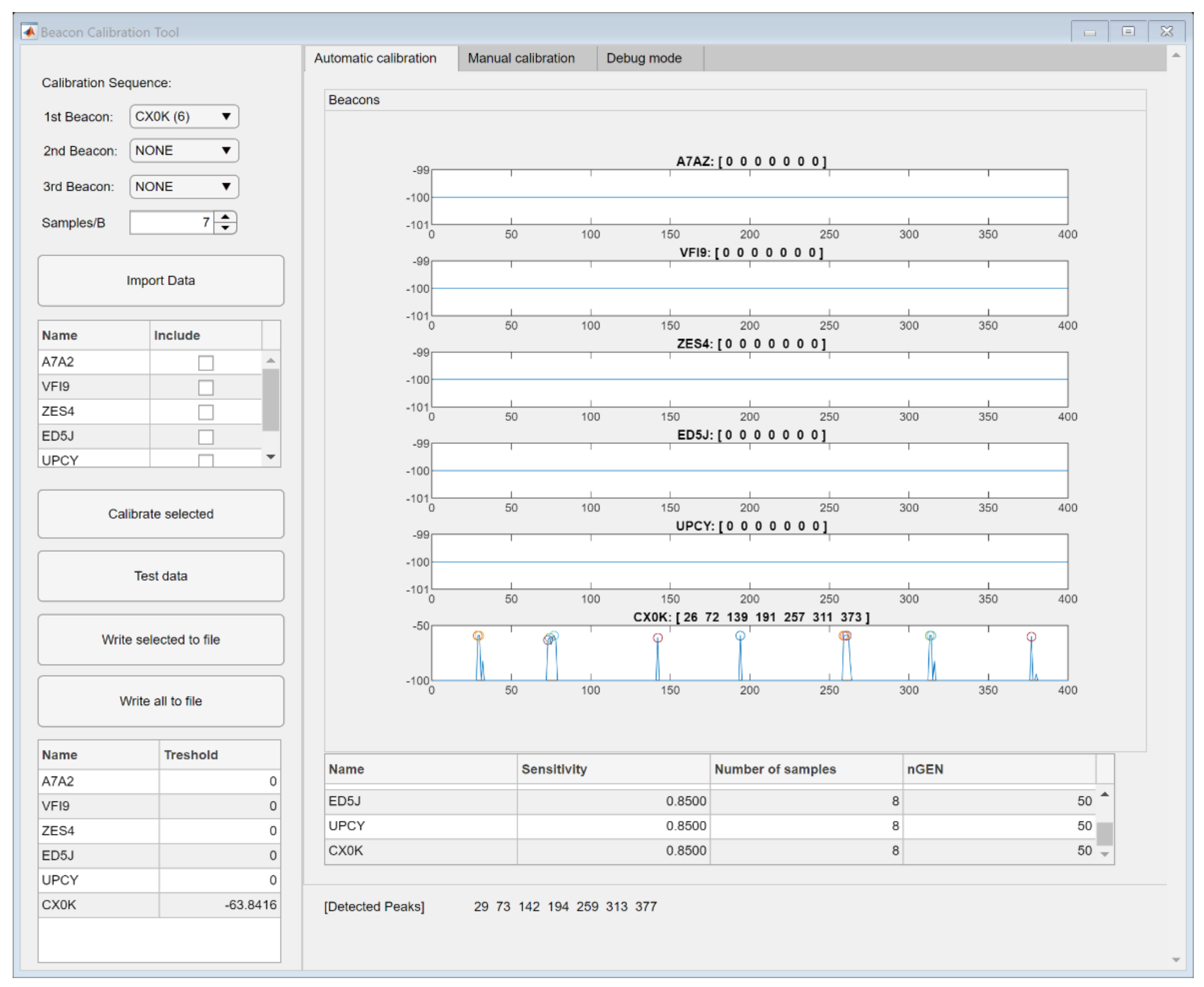
4.2. Beacon Calibration Tool Evaluation
The calibration took place using the above Calibration protocol, which ensures simple and accurate calibration of the used beacons. For each of the used beacons, seven to nine samples were collected for the threshold optimization process. Their thresholds were determined automatically using the Beacon Calibration Tool. To verify the correct operation of the Beacon Calibration Tool, a single beacon was selected with four various orientations: (1) the beacon was put vertically, with the antenna facing away from the front of the desk, (2) with the antenna facing towards the front of the desk, (3) the beacon was put horizontally with the antenna facing up, and (4) with the antenna facing the table. The calibration was performed for each stated orientation. A single cycle of measurements for real-time localization for the selected beacon was performed based on the automatically determined thresholds. The calibration parameters are shown in
Table 7.
The results of the calibration procedures and corresponding real-time measurements are shown in
Table 8. Please note that the verification was only done using the LM Technologies adapter.
The success rate (SR) was determined based on the following Equation (9):
where n is the complete number of passings-by, f
p the number of false positives and f
n the number of false negatives. Since other beacons were powered-off during this initial test, the number of false positives indicates that multiple detections occurred. Obviously, false negatives represent the missing detections when an actual passing by occurred. The time delay is the time difference between a timestamp when the IPS registered the event of passing by and the timestamp mouse button was pressed by the person performing the experiments, as noted in Equation (10):
The average time delay was calculated only on successful triggers (n
s) in the following Equation (11):
where
is the i-th sample of time delay.
Similarly, the Standard Deviation of time delay was calculated in the following Equation (12):
As can be noted from the results of
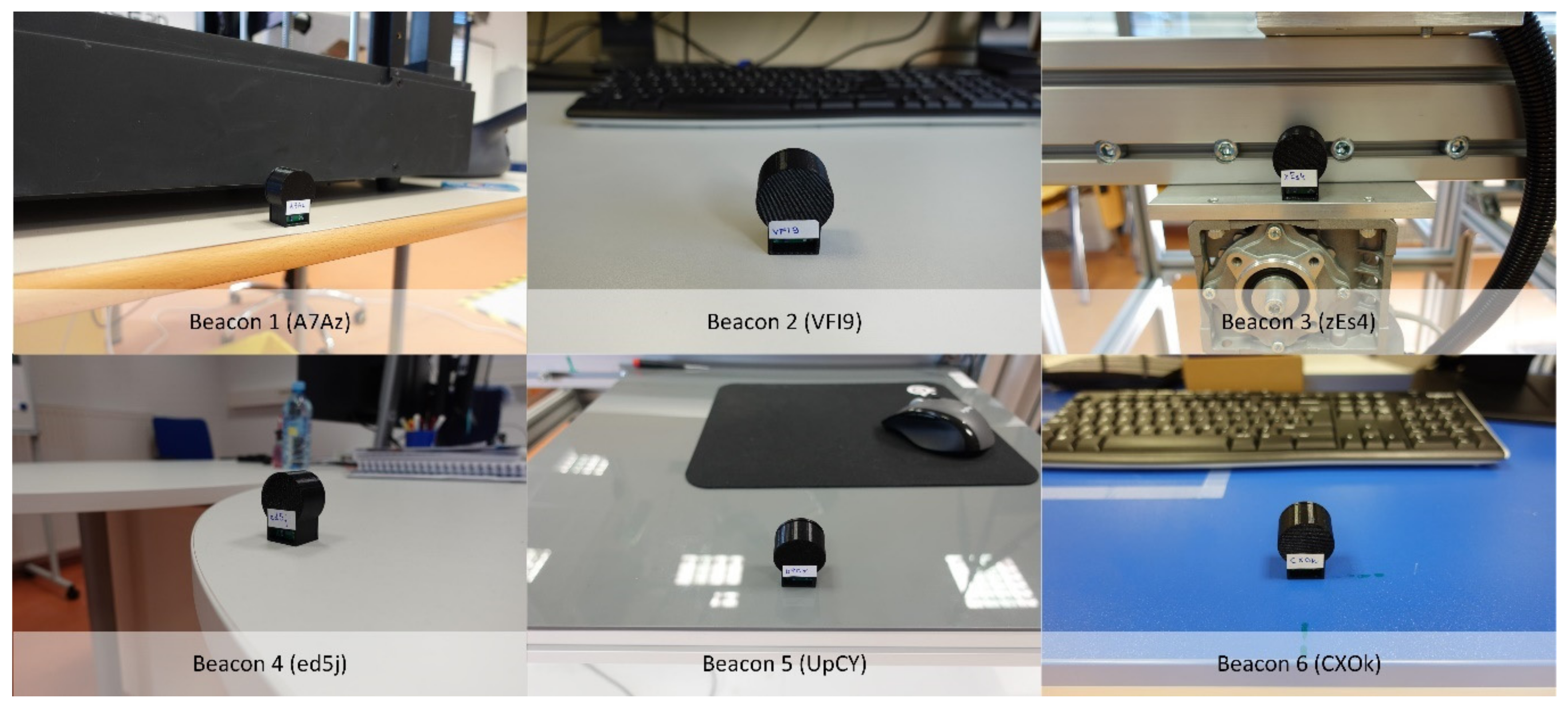
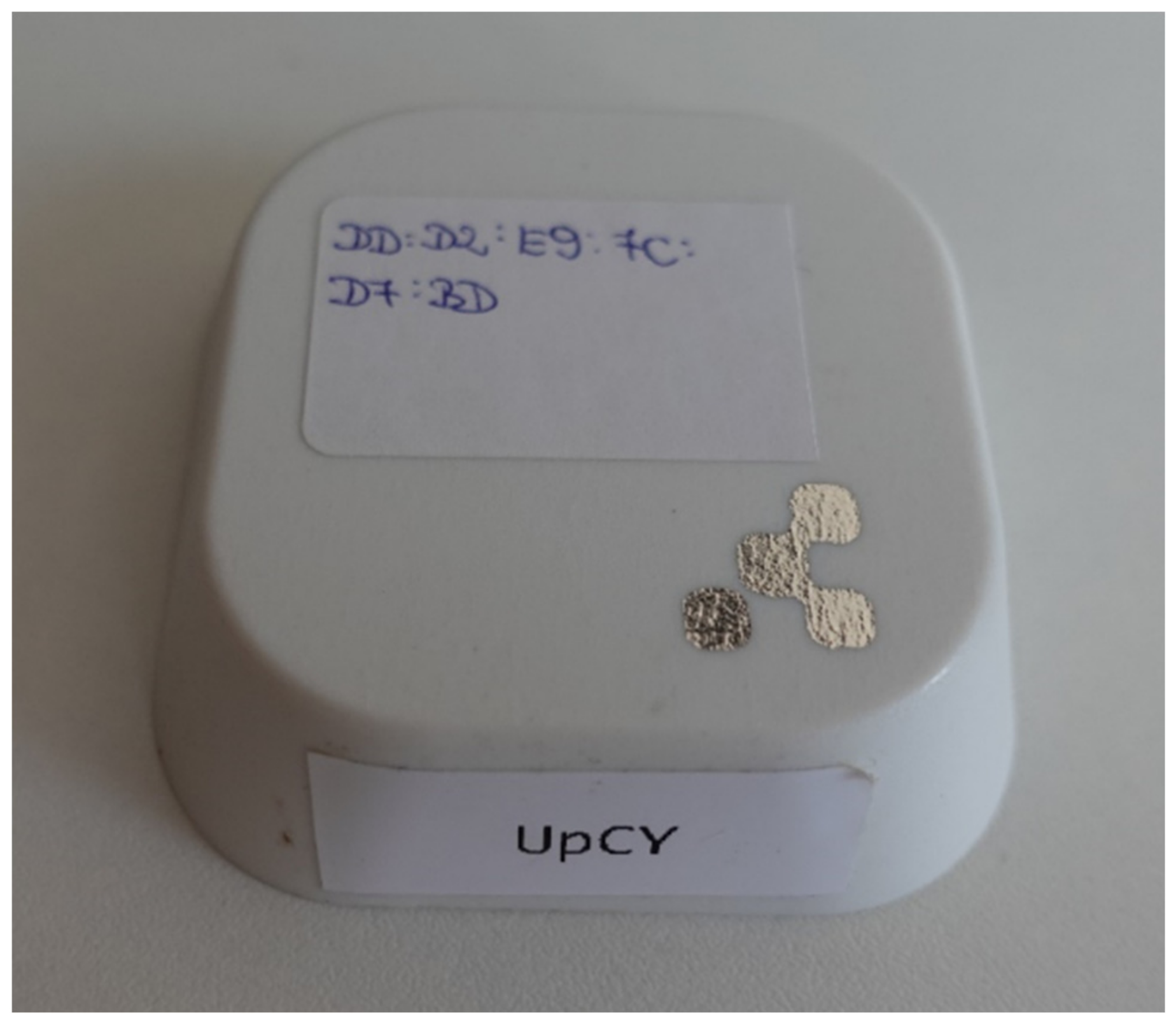
Table 8, the threshold values from the calibration differ from orientation to orientation. Based on the results, it is recommended that the beacon is set vertically with the antenna facing towards the front of the desk; therefore, all further tests were performed based on that orientation, as shown in
Figure 9. The high percentage (over 92%) of correctly determined passings-by indicate that the calibration procedure and the Beacon Calibration Tool worked as intended. As can be seen from
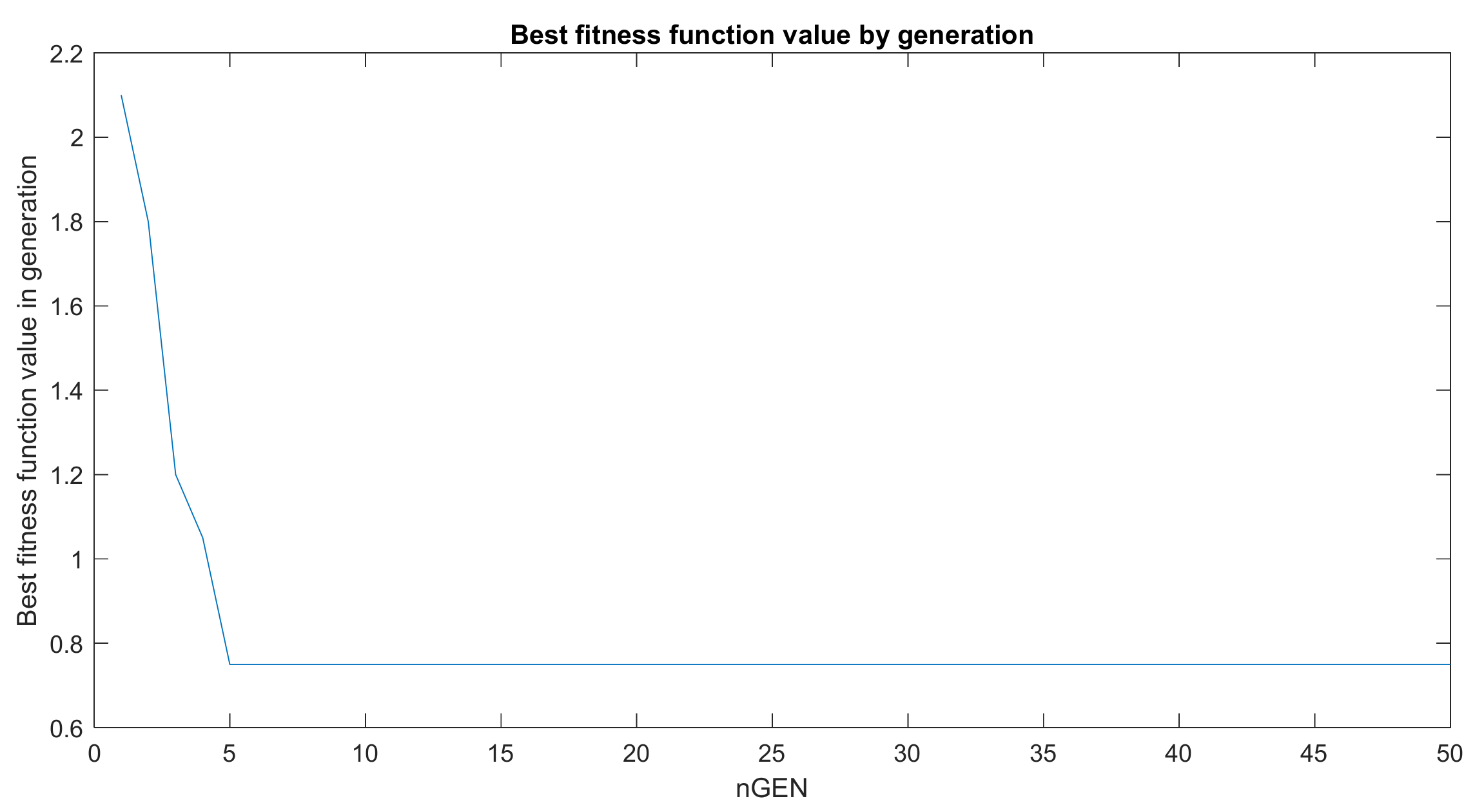
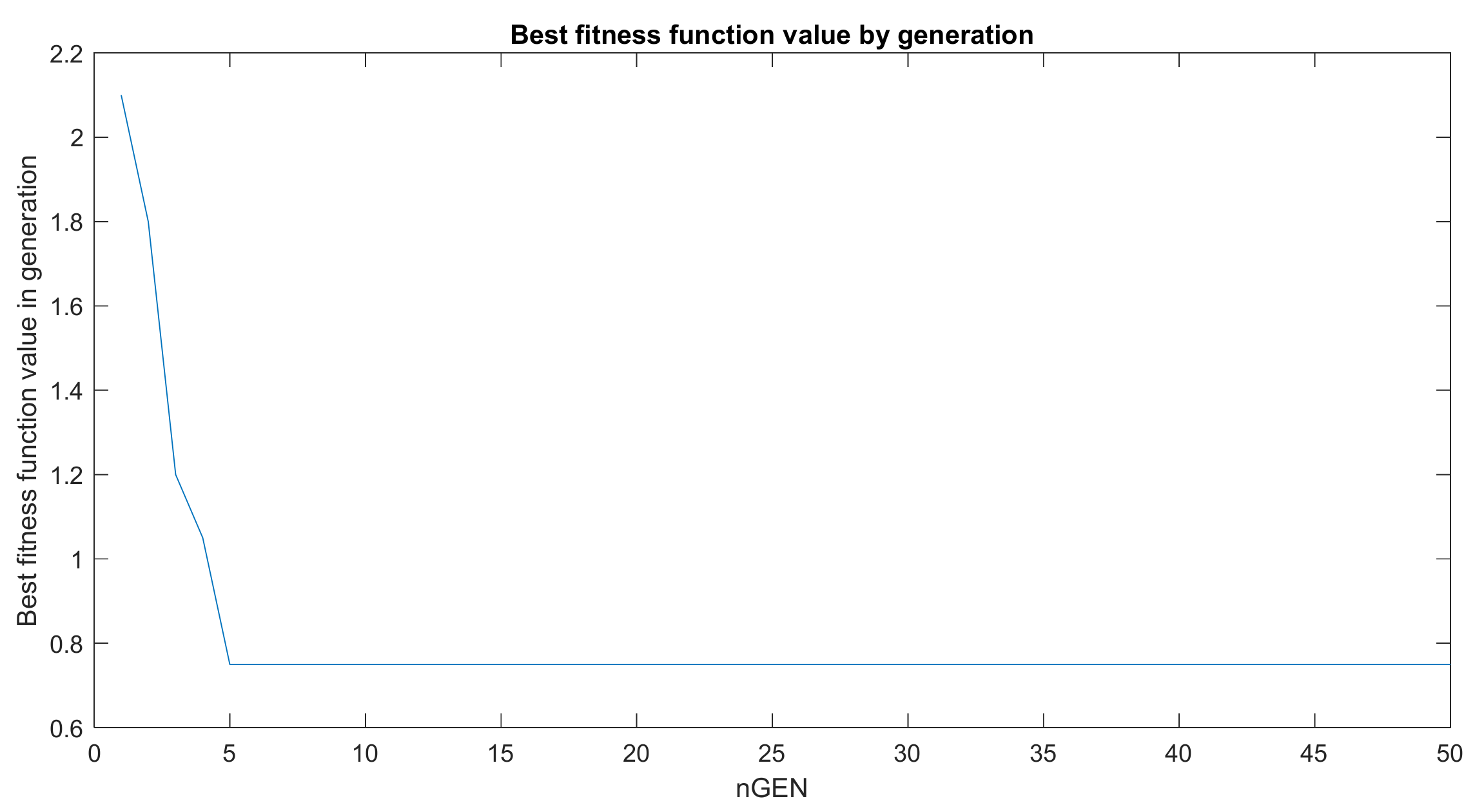
Figure 12, the fitness function value decreased with each new generation, showing that the PSO optimization algorithm improved the initial solution as expected.
As can be seen from
Figure 12, the best fitness function value of the generation improved up to the fifth generation (50 evaluations) and remained the same until the end of the optimization process. The PSO optimization algorithm in the Beacon Calibration Tool guided the process of discovering all seven peaks that were acquired in the calibration procedure. Based on the above results, the calibration was performed for all the used beacons for two Bluetooth USB adapters. The same calibration parameters were used for both configurations, as shown in
Table 5. The results of the complete calibration are shown in
Table 9.
Furthermore, the initial real-time localization tests show that the localization was successful in over 93.5% in the best-case scenario. In the following extensive tests, the IPS was analyzed in detail in the real-world scenario operation.
4.3. Real-Time Localization Accuracy
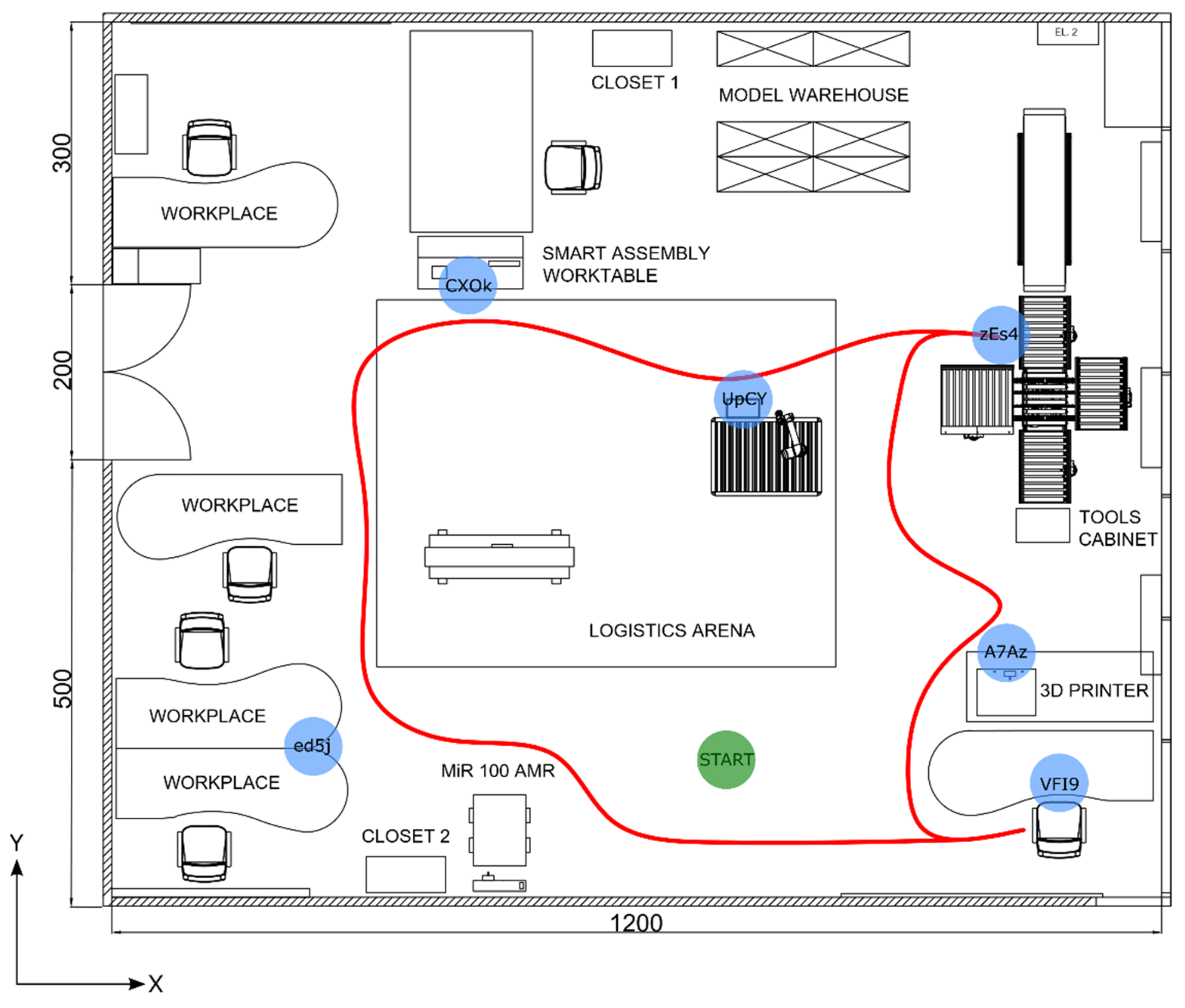
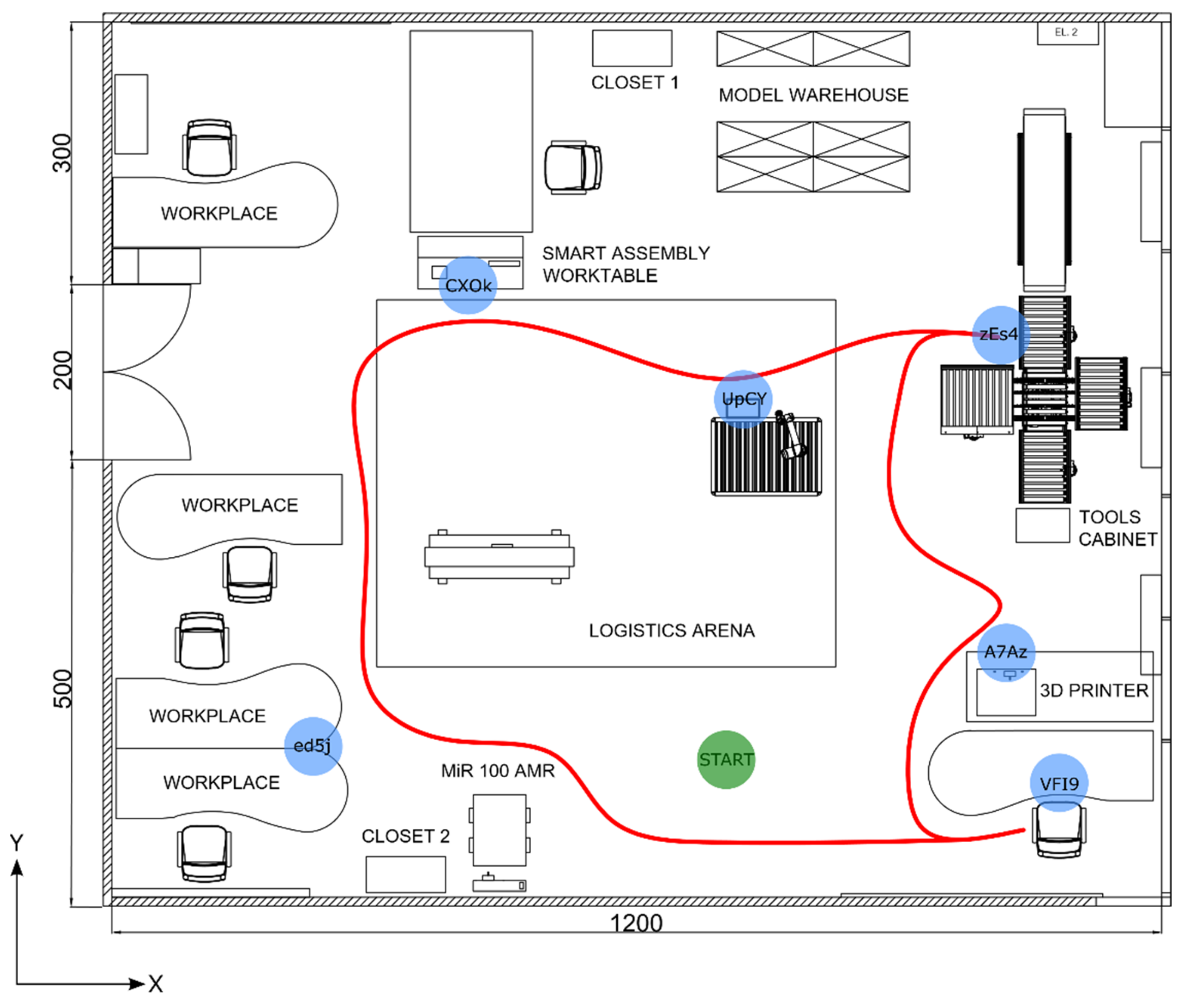
The most important metric of IPS evaluation is the rate of successful triggers with the occurrence of actual passings-by of the beacon. Additionally, the system must be resistant to false detections, which might occur if the beacons are not spaced apart appropriately. Therefore, three different scenarios were prepared to evaluate real-world performance. The real-time localization accuracy test was executed with the parameters specified in
Table 6, with Scenario 1 being the reference scenario. Altogether, more than 400 events for a single Bluetooth USB adapter were recorded, with an overall detection success rate of 95.7% for the Trust Manga Bluetooth 4.0 USB adapter and 95.9% for the LM Technologies LM1010 adapter, respectively. The results are presented in
Table 10.
Here, false positives were obtained by examining the log file of the measurements. As the person walking around moved between the beacons, the beacons’ IDs were known in advance in the predefined sequence (except in Scenario 3). In Scenario 3, the person had to note the walking path between the beacons. If a beacon appeared before the one that should, this was considered a false positive. For example, if the beacons were to be very close together and calibrated improperly, the system might detect a beacon that the person was not close to, which is referred to as a false positive. Similarly, false negatives were obtained in the same way, only this time, we looked for the ones that were absent from the measurement log file.
The results from the three different scenarios for the first USB Bluetooth adapters indicate that the proposed IPS works stably. In the first scenario, the success rate was 96.53%, with five false negatives, which was expected, according to the Beacon Calibration Tool analysis. In the second scenario, where the order-picker walked counterclockwise, the results improved marginally. The last scenario introduced a few false-positive detections into the measurements, therefore the overall success rate dropped a few percent. The average time delays between detection and the near proximity of the person to the beacons are approximately the same, which is also true for the Standard Deviation of the time delay. This means that the repeatability of the measurements is high. The negative sign indicates that the IPS detection of the beacon took place shortly before the person approached the beacon at a few centimeters.
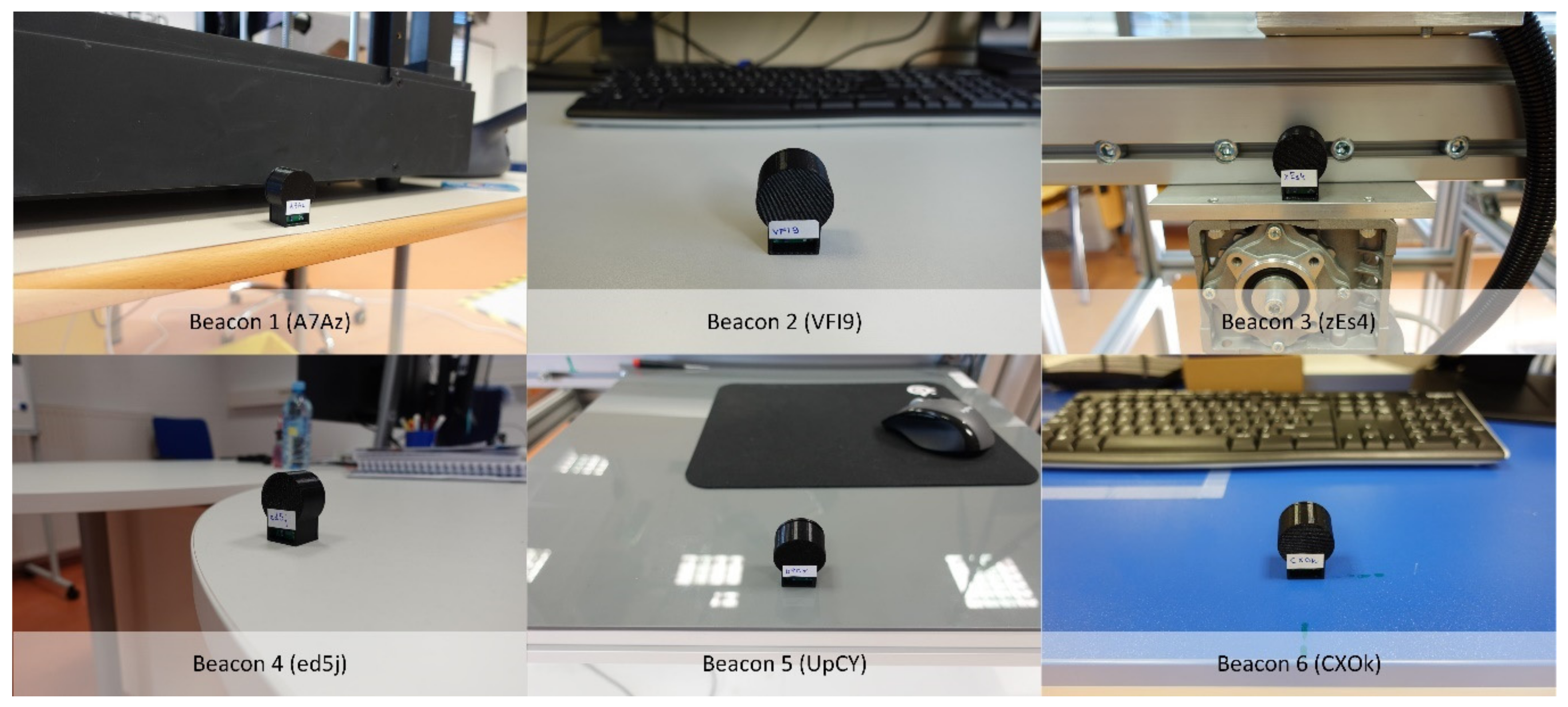
For the second used USB Bluetooth adapter, the results are also quite like the ones acquired by the first USB Bluetooth adapter. However, some differences arose in the average time delay and Standard Deviation of the time delay. The external antenna on the adapter provided more stable RSSI readings, but, in the case of Beacon 5 (UpCY), the beacon was detected much earlier than it should be, which contributed to the positive time delay. That is because there was no obstruction of the signal between beacon and receiver, and in the event of walking toward the receiver, the detection requirement was fulfilled quickly. This can be serviced by experimenting with beacon positioning and orientation, or using other Bluetooth USB adapters. Similarly, for the experiments conducted for both Bluetooth USB adapters, the Raspberry Pi onboard Bluetooth receiver was tested, but the results obtained in these experiments proved much worse than the ones with the external Bluetooth USB adapters.
Due to the similarities between the success rate of the first and second adapters, we tested how well the Trust Manga Bluetooth 4.0 USB adapter performed with the calibration values obtained with the LM Technologies LM1010 adapter. The results are presented in
Table 11.
The above results indicate that the calibration procedure is necessary when using a different type of Bluetooth USB adapters, even if the same settings are used of the beacons transmitting power and interval. The results in the second scenario may be somewhat surprising, given that Scenario 1 and Scenario 3 achieved about 8–14% worse results. These results were, however, the consequence of having set thresholds for several beacons sub-optimally–the system may detect them in some cases, but not always, because the system filtered out more than it should.
5. Discussion
The results from the study of the proposed IPS indicate that the system worked stably and reliably in the office/laboratory setting with few false detections. The success rate of up to 98% in the office/laboratory setting was achieved in the best-case scenario and 93% in the worst-case scenario, respectively. The average time delay took −0.77 s in the worst-case, and −0.19 s in the best-case scenario, which means that the detection took place a bit later after the person approached a beacon, but the calibration values and beacon orientation could still be modified to achieve better results. The Standard Deviation of the time delay was approximately equal for all scenarios obtained using the Trust Manga Bluetooth 4.0 USB adapter, and was a bit higher for the results obtained by the LM Technologies LM1010 adapter. The false positive detection rate reached up to 5% and 1.5% passings-by not being detected in the worst-case scenario, respectively. The two external Bluetooth USB adapters used worked pretty similarly in terms of success rate, but achieved different results in terms of average time delay and Standard Deviation, which speaks in favor of the Trust Manga Bluetooth 4.0 USB. Due to the high-gain antenna used on the LM Technologies LM1010 adapter, the signal was very strong, and sometimes the beacon was detected too soon before the person approached the beacon. This is especially true if the line of sight between the beacon and the receiver is clear, and the calibration values are set incorrectly. We did not detect similar problems with the Trust Manga Bluetooth 4.0 USB, which is also more appropriate from the standpoint of dimensions.
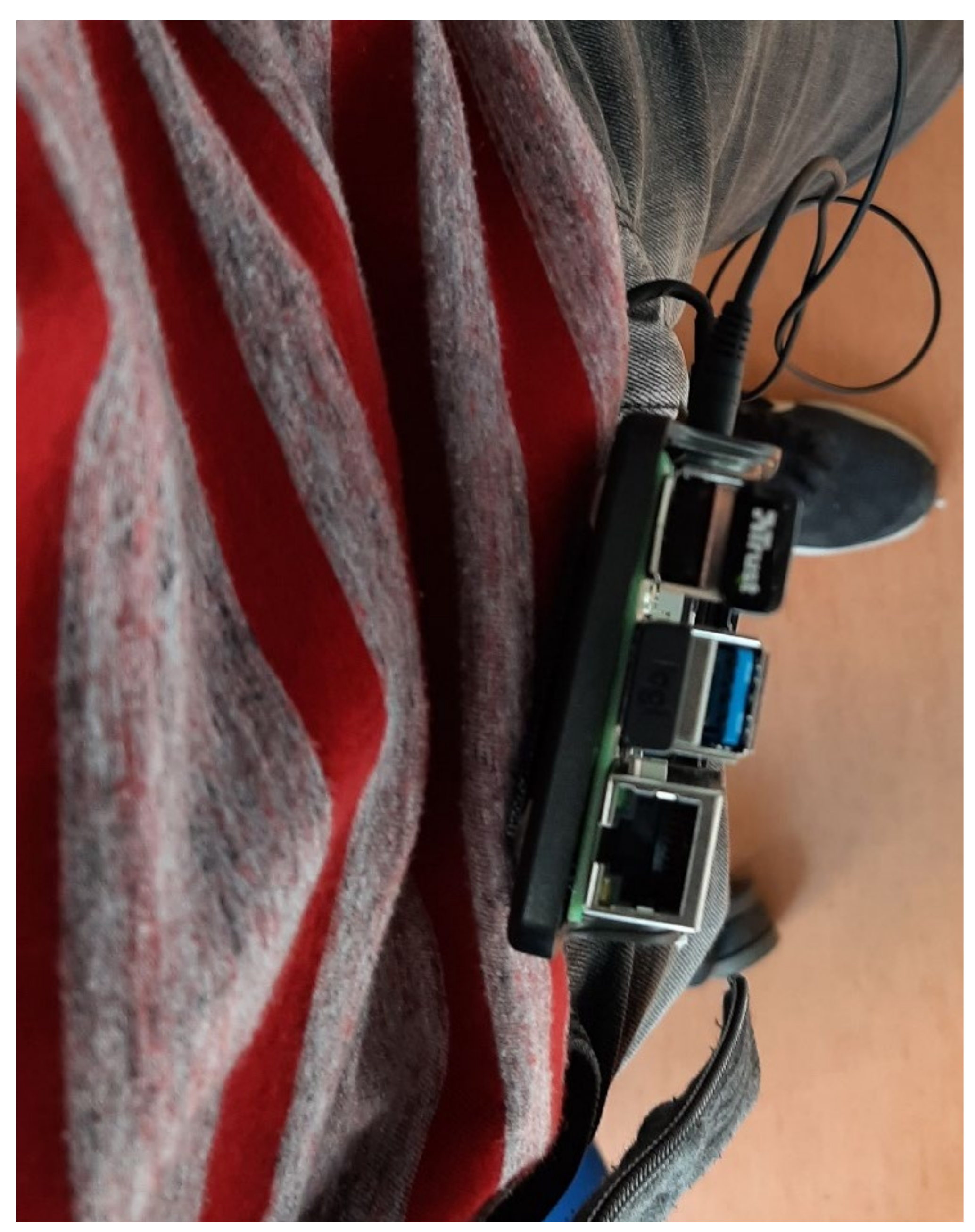
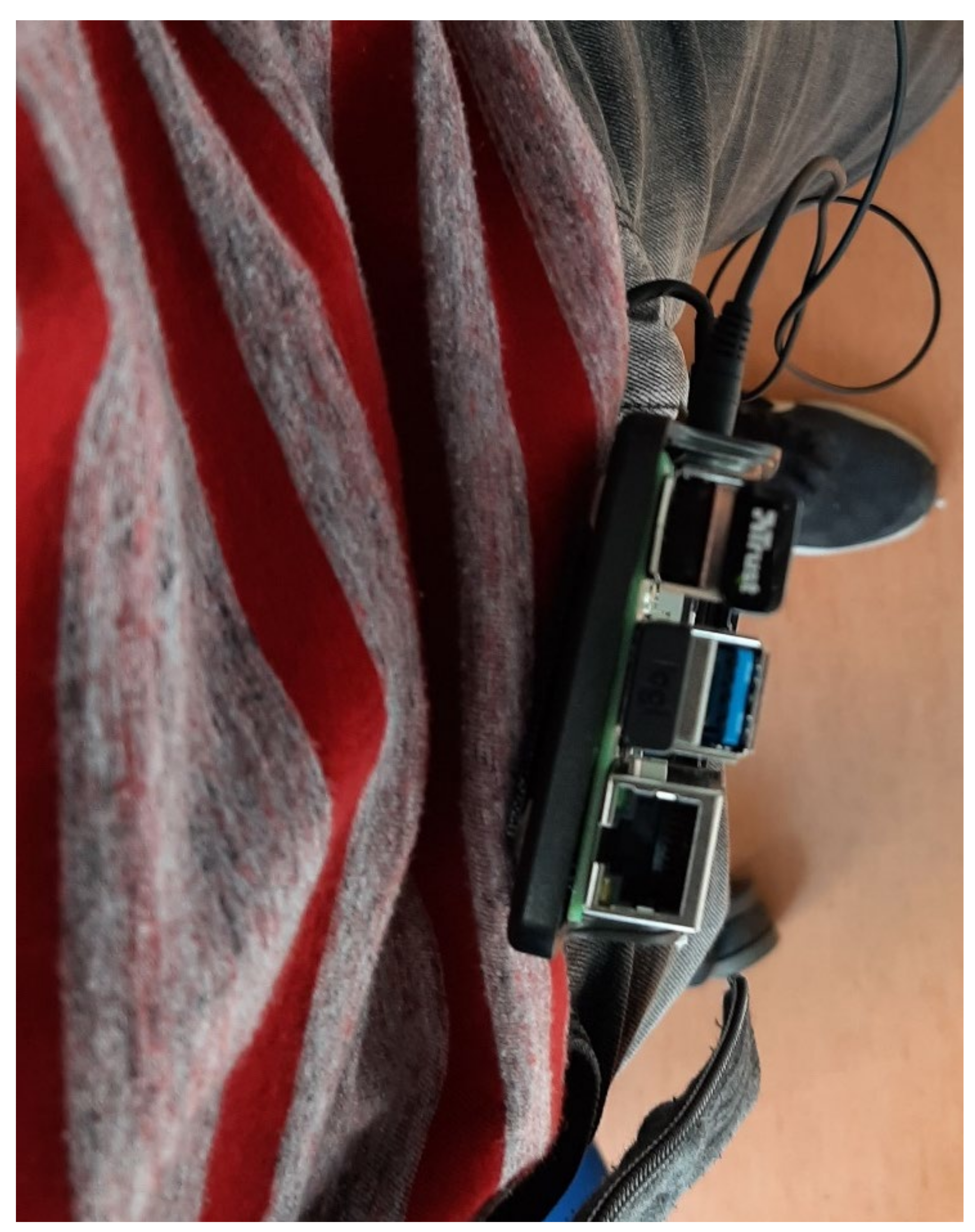
The interface of the proposed IPS is simple and adaptable in terms of using multiple beacons to cover larger areas or multiple rooms, because BLE beacons are relatively cheap devices. Their only running costs are batteries, which must be replaced periodically, but otherwise they do not require any servicing after the initial configuration. Multiple beacons can be configured in bulk over the air (OTA); hence, no physical connections are required between transmitters and receivers. The main drawback of the proposed IPS are the limitations on transmitter and receiver positions—we found that the system works best if the receiver is attached at the front, to the belt of the person carrying the receiver. It is preferred that the receiver is positioned as colinearly as possible to the main axis of the person carrying the system. The signals obtained from the transmitters are most stable if they are positioned at the receiver level, but higher and lower placements at around 20 cm are also tolerated well. Even though the calibration phase is almost fully automated, it can still take a considerable amount of time to perform the calibration for the first time, especially for larger areas or several rooms. Nevertheless, this can still be performed considerably faster than calibration using the fingerprinting method. The main advantage of the BLE technology is that the transmitters are not mutually dependent, if one of the beacons must be re-calibrated, it does not require recalibration of the whole system, as in UWB-based RTLS. Additionally, battery-powered devices that are very small can be placed almost anywhere.
The proposed IPS is not vendor dependent—it can be used with any BLE-capable beacons and receivers; however, results may vary greatly, as it was found that external Bluetooth receivers proved to be superior to the one integrated on Raspberry Pi. Additionally, multiple Bluetooth receivers can be used for several subjects; however, the running costs increase considerably, accounting for the multiple needed batteries and external Bluetooth receivers. Smartphones could also be used for the localization, but, again, the external Bluetooth receivers work significantly better in our experience, while the software had to be rewritten for the Android operating system. Since the required processing power for localization is low, systems requiring fewer beacons could probably run satisfactorily on other low-powered devices, such as Raspberry Pi Zero or older versions of Raspberry Pi, which consume less energy. Older Raspberry Pi versions would also present noticeable financial savings. Since the system runs on an open real-time localization engine, it could easily be modified to suit specific needs, not only those investigated in the experiment. The data gained by the IPS could be used in various applications: (1) to monitor the number of workers in the vicinity of a specific area, (2) to prevent worker congestion, (3) to track elderly patients in nursing homes, (4) to guide tourists in museums and entertainment centers, etc. The proposed IPS is presented as a framework to build upon, not a final solution. The authors can also provide raw data from the acquired measurements upon request.
6. Conclusions
The authors presented a cost-effective BLE-based IPS that can detect passings-by with very high accuracy (up to 98%) in office/laboratory environments with few false detections in real time. The calibration process is time-efficient and straightforward, and scales easily with greater area, compared to fingerprinting-based methods. The IPS is meant to be used in various fields, especially in small to mid-sized manually operated warehouses. We conclude that the localization accuracy depends mainly on the type of hardware used, the position of the transmitter and receiver, and the success of the calibration phase. In the above experiments, a single person was conducting the experiments, but the system can be scaled easily between multiple users. For the users to be distinguished uniquely, the localization engine must only post additional user data to the database. The localization algorithms are, namely, executed locally and are mutually independent.
Several new studies should be performed to find the best combinations of BLE beacons and receivers, which are smaller, more energy-efficient and especially economical for large IPS instalments, although the system is intended primarily for smaller to medium-sized manually operated warehouses. Additionally, the effect of different placements should be inspected, along with the influence of walking speed. In this setting, the current configuration can become quite expensive for larger areas or multiple rooms, making such a project financially unfeasible for larger warehouses. We also propose that researchers explore the option of beacons and Raspberry Pi stations being reversed—the beacons should be carried around and the Raspberry Pis should be placed on fixed positions. That way battery power requirements could be reduced further, as the Raspberry Pis could be powered via electrical outlets. If possible, BLE beacons that only use single channel for data transmission should be used, to reduce the RSSI information variation and packet loss further.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}