
A Simple and Novel Localization Method Using the Radiated Ultra-Low-Frequency Electromagnetic Wave Signals from the Surface Vehicle and Submerged Ones



Abstract
:1. Introduction
2. Methods
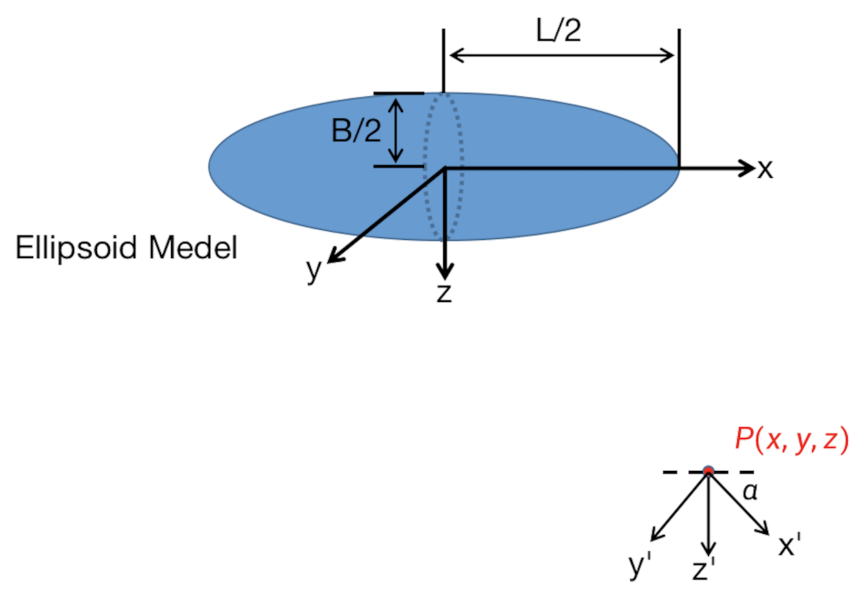
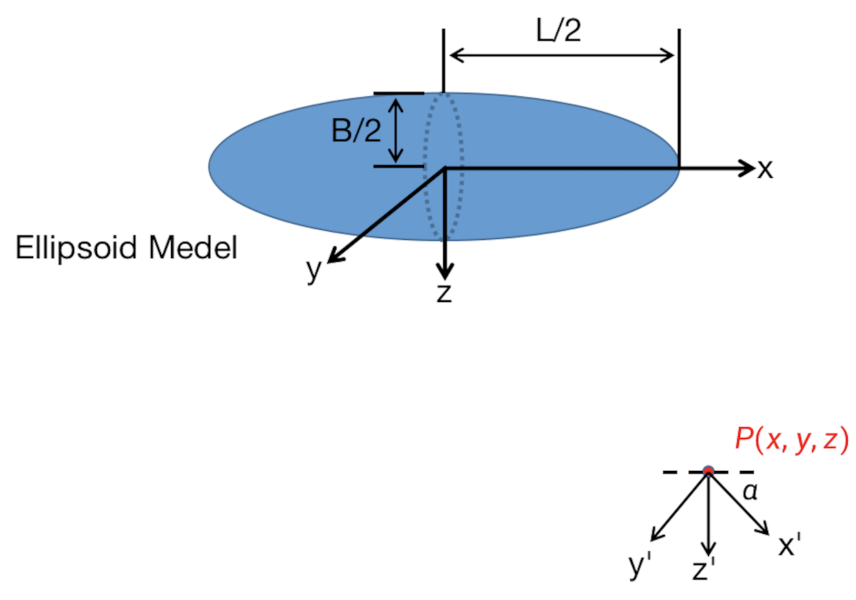
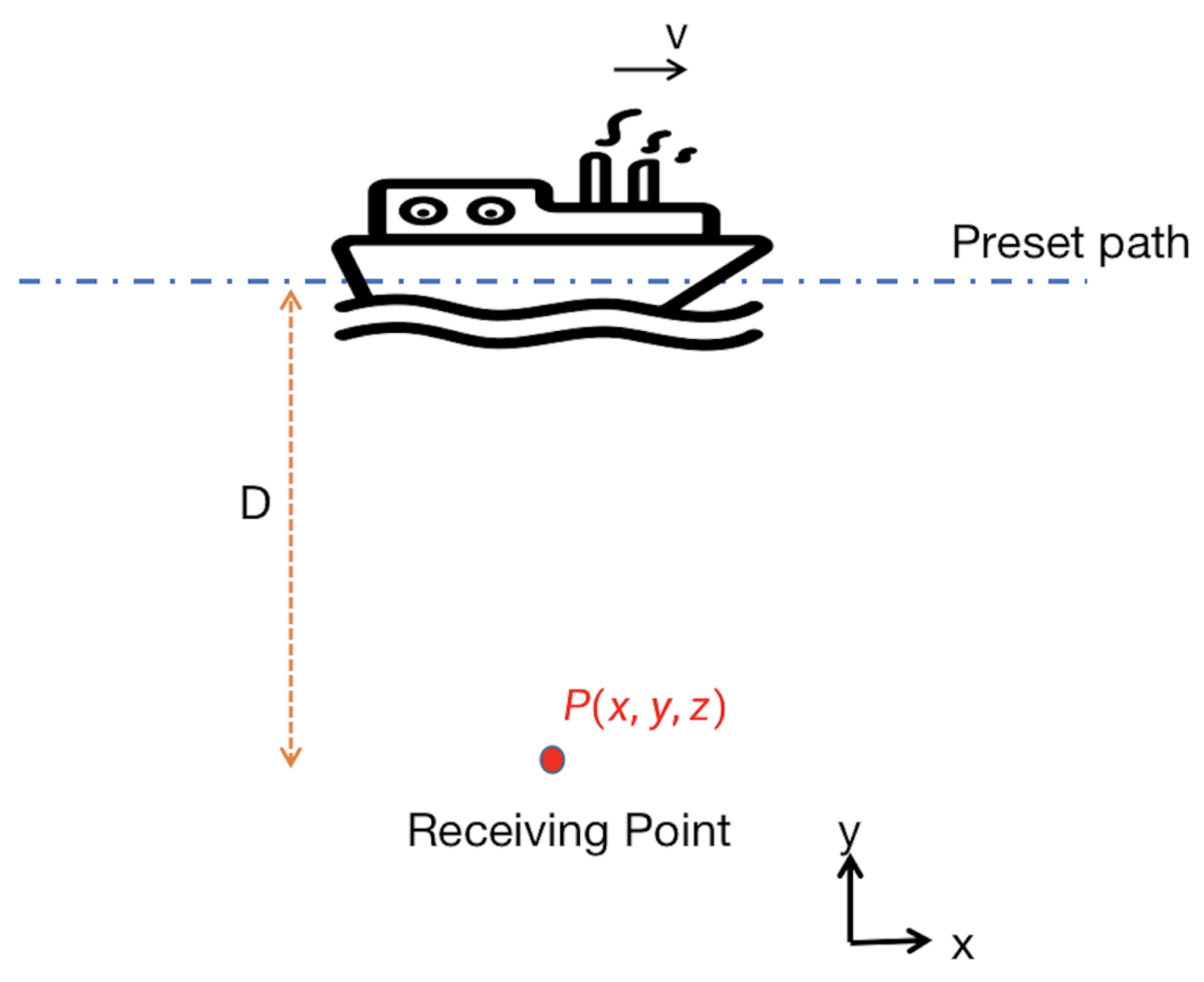
2.1. Target Modeling
2.2. Hybrid Localization Algorithm
| Algorithm 1: Hybrid Localization Algorithm |
| Require: |
| Require: Ant Colony Algorithm: set |
| 1: loop |
| 2: for |
| 3: loop |
| 4: for |
| 5: update Equation (4), do |
| 6: end loop |
| 7: update |
| 8: end loop |
| 9: Find to minimize |
| Require: LM Algorithm: set , Maximum Iteration Number N, Minimum Error |
| 10: for , do |
| 11: loop |
| 12: update Equation (8) |
| 13: update |
| 14: until |
| 15: end loop |
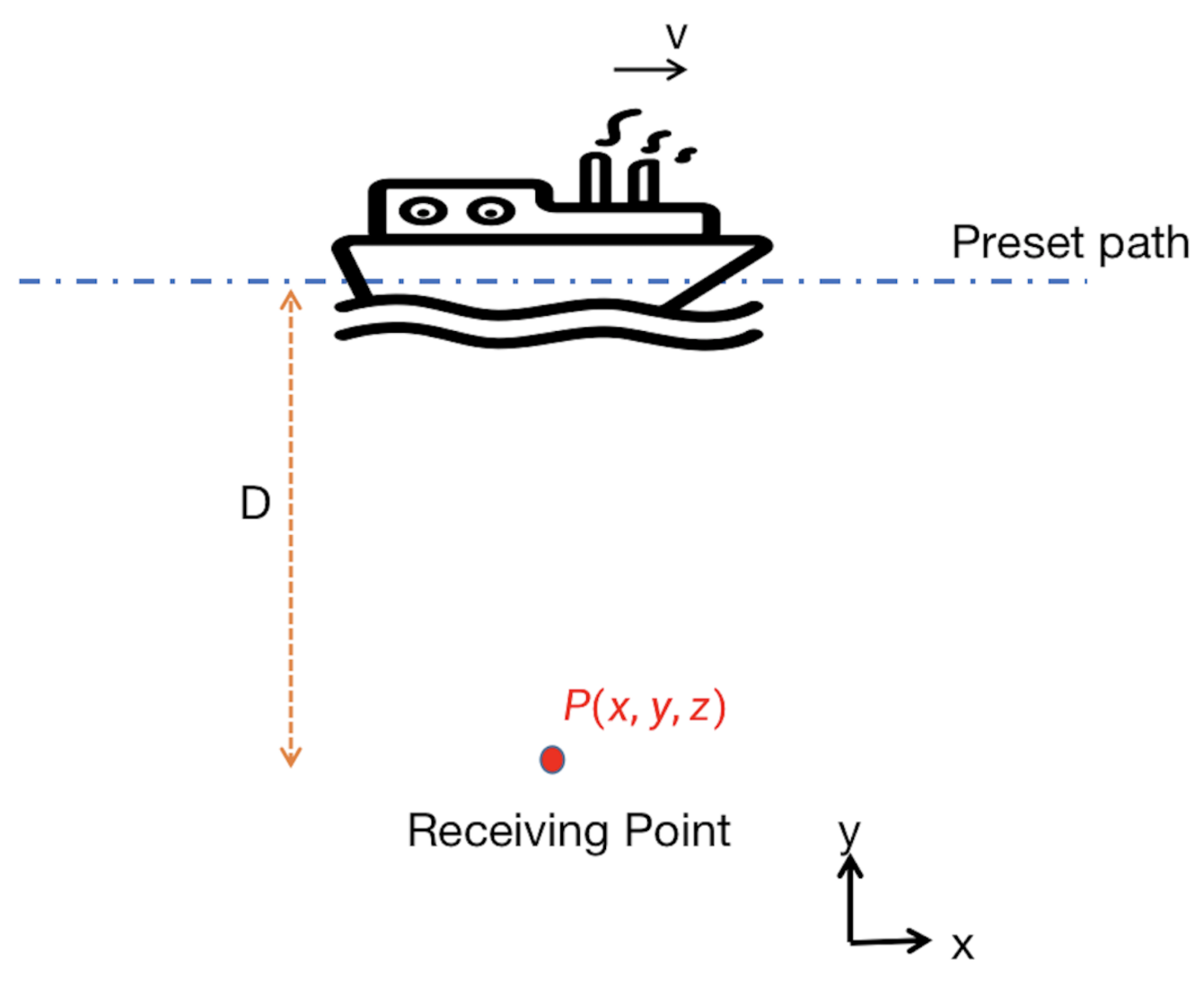
2.3. Description of the Validation Experiment
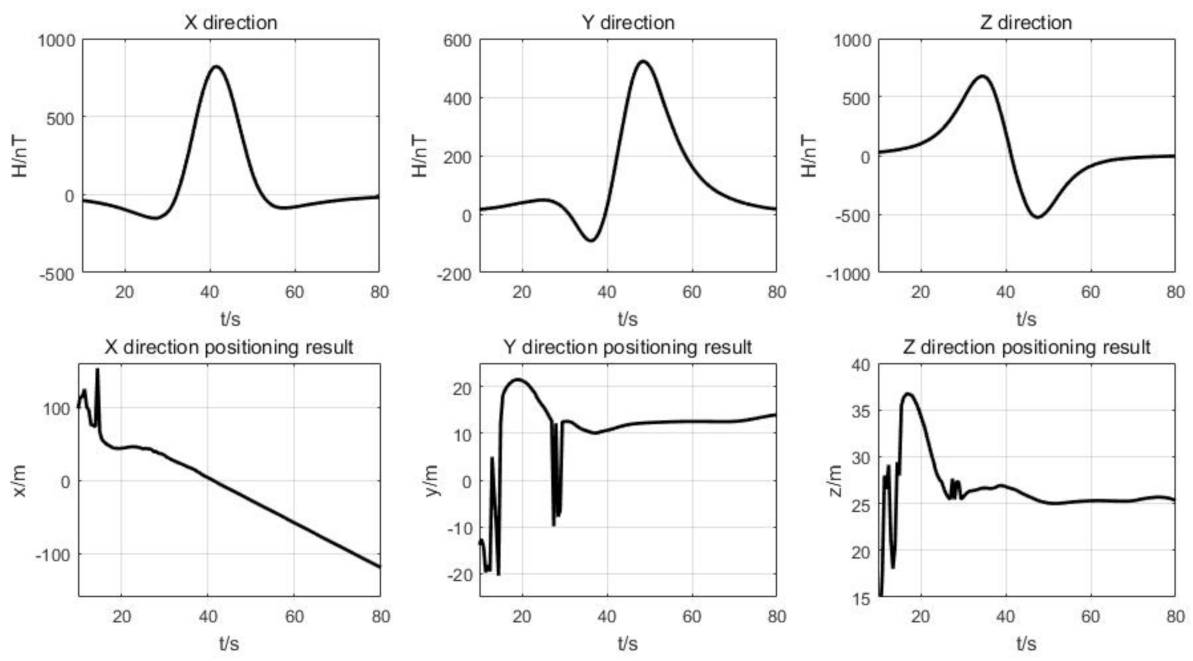
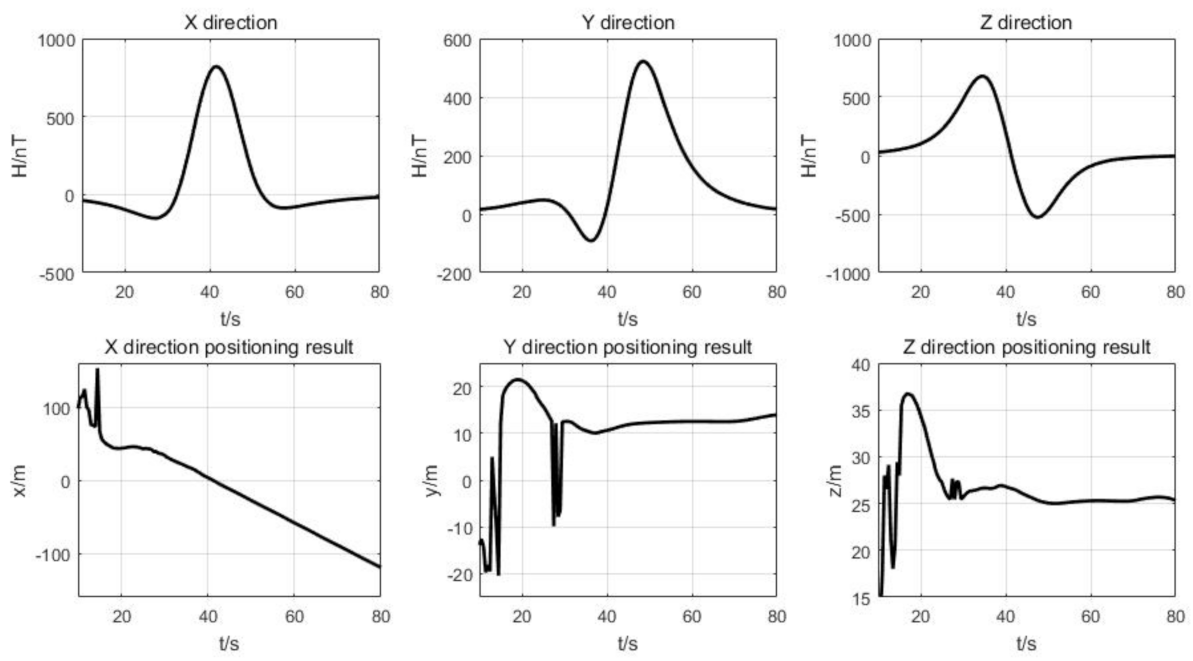
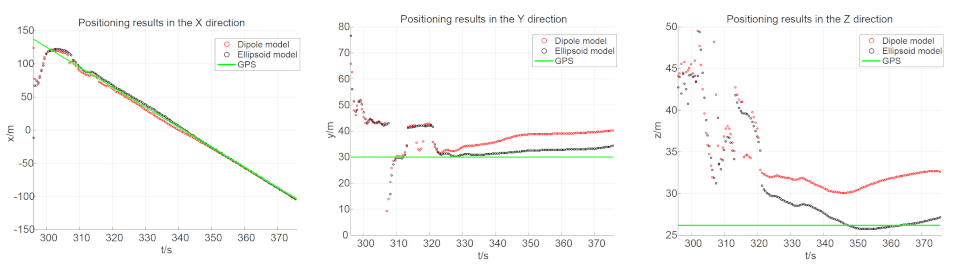
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tan, H.P.; Diamant, R.; Seah, W.K.; Waldmeyer, M. A survey of techniques and challenges in underwater localization. Ocean. Eng. 2011, 38, 1663–1676. [Google Scholar] [CrossRef] [Green Version]
- Liang, G.L.; Lin, W.; Wang, Y. Estimation of effective sound velocity in shallow channel and its application in underwater acoustic localization. Technical Acoustics. Tech. Acoust. 2012, 31, 42–47. [Google Scholar]
- Holmes, J.J. Exploitation of a Ship’s Magnetic Field Signatures. Synth. Lect. Comput. Electromagn. 2006, 1, 1–78. [Google Scholar] [CrossRef] [Green Version]
- King, R.W.P. Lateral electromagnetic waves from a horizontal antenna for remote sensing in the ocean. IEEE Trans. Antennas Propag. 1989, 37, 1250–1255. [Google Scholar] [CrossRef]
- Sun, F.; Huang, Y.; Wu, L.-H. Underwater Continuous Localization Based on Magnetic Dipole Target Using Magnetic Gradient Tensor and Draft Depth. IEEE Geosci. Remote Sens. Lett. 2013, 11, 178–180. [Google Scholar]
- Tiron, R. Gulf Nation Poised to Lead Region in Production of Unmanned Aircraft. Scand. J. Rheumatol. 2005, 35, 44–47. [Google Scholar]
- Holmes, J.J. Reduction of a Ship’s Magnetic Field Signatures. Synth. Lect. Comput. Electromagn. 2006, 1, 1–78. [Google Scholar] [CrossRef] [Green Version]
- Gao, X. Research on the Localization of Alternating Magnetic Dipole Source in Geomagnetic Environment. Ph.D. Thesis, Northwestern Polytechnical University, Xi’an, China, 2018. [Google Scholar]
- Ye, P.; Gong, S. Ship’s Physics Field; Ordnance Industry Press: Beijing, China, 1992. [Google Scholar]
- Gao, X.; Yan, S.; Li, B. Study of hybrid algorithm for localization of mobile magnetic target by a single fluxgate. J. Dalian Univ. Technol. 2016, 56, 292–298. [Google Scholar]
- Jinhong, W.; Bin, L.; Lianping, C.; Li, L. A Novel Detection Method for Underwater Moving Targets by Measuring Their ELF Emissions with Inductive Sensors. Sensors 2017, 17, 1734. [Google Scholar]
- Qu, X.; Yang, R.; Shan, Z. Analysis and comparison on magnetic field modeling method of submarine. Ship Sci. Technol. 2011, 33, 7–11. [Google Scholar]
- Milosevic, Z.; Fernandez, R.A.S.; Dominguez, S.; Rossi, C. Guidance for Autonomous Underwater Vehicles in Confined Semistructured Environments. Sensors 2020, 20, 7237. [Google Scholar] [CrossRef] [PubMed]
- Sands, T. Development of Deterministic Artificial Intelligence for Unmanned Underwater Vehicles (UUV). Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Eldred, R.; Lussier, J.; Pollman, A. Design and Testing of a Spherical Autonomous Underwater Vehicle for Shipwreck Interior Exploration. Mar. Sci. Eng. 2021, 9, 320. [Google Scholar] [CrossRef]
- Holmes, J.J. Modeling a Ship’s Ferromagnetic Signatures. Synth. Lect. Comput. Electromagn. 2006, 1, 1–78. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Li, Q.; Liu, J. Comparison between the Two Models of Warship’s Magnetic Field. J. Detect. Control. 2007, S1, 62–66. [Google Scholar]
- Bian, X.; Li, Q.; Li, H. Study on real-time Magnetic localization Methods of Warship. J. Detect. Control. 2006, 28, 3538. [Google Scholar]
- Vázquez, K.R. Ant Colony Optimization. Genet. Program. Evolvable Mach. 2005, 6, 459–460. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D [m] | 0 | 10 | 20 | 30 | 40 | 50 |
| preset value [m] | 0 | 10 | 20 | 30 | 40 | 50 |
| calculated value [m] | 0.462 | 12.52 | 23.5 | 32.86 | 35.66 | 46.1 |
| error value | 20.13% | 14.89% | 8.7% | 12.17% | 8.46% |
| D [m] | 0 | 10 | 20 | 30 | 40 | 50 |
| preset value [m] | 26 | 26 | 26 | 26 | 26 | 26 |
| calculated value [m] | 26.86 | 25.2 | 25.96 | 26.02 | 26.55 | 25.7 |
| error value | 3.22% | 3.08% | 10.15% | 0.07% | 2.07% | 1.17% |
| Distance Abeam D [m] | Ideal Results | Ellipsoid Model | Dipole Model |
|---|---|---|---|
| z [m] | |||
| 0 | 27.86 (6.67%) | 38.01 (31.59%) | |
| 10 | 25.2 (3.17%) | 33.6 (22.62%) | |
| 20 | 26 | 25.96 (0.15%) | 32.89 (20.95%) |
| 30 | 26.02 (0.08%) | 31.84 (18.34%) | |
| 40 | 26.55 (2.07%) | 30.49 (14.73%) | |
| 50 | 25.7 (1.17%) | 27.9 (6.81%) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, K.; Li, D.; Li, H.; Ding, K.; Li, B. A Simple and Novel Localization Method Using the Radiated Ultra-Low-Frequency Electromagnetic Wave Signals from the Surface Vehicle and Submerged Ones. Electronics 2021, 10, 784. https://doi.org/10.3390/electronics10070784
Yang K, Li D, Li H, Ding K, Li B. A Simple and Novel Localization Method Using the Radiated Ultra-Low-Frequency Electromagnetic Wave Signals from the Surface Vehicle and Submerged Ones. Electronics. 2021; 10(7):784. https://doi.org/10.3390/electronics10070784
Chicago/Turabian StyleYang, Ke, Dongsheng Li, Hao Li, Kai Ding, and Bin Li. 2021. "A Simple and Novel Localization Method Using the Radiated Ultra-Low-Frequency Electromagnetic Wave Signals from the Surface Vehicle and Submerged Ones" Electronics 10, no. 7: 784. https://doi.org/10.3390/electronics10070784
APA StyleYang, K., Li, D., Li, H., Ding, K., & Li, B. (2021). A Simple and Novel Localization Method Using the Radiated Ultra-Low-Frequency Electromagnetic Wave Signals from the Surface Vehicle and Submerged Ones. Electronics, 10(7), 784. https://doi.org/10.3390/electronics10070784