Abstract
Unmanned aerial vehicle (UAV) communication is regarded as a promising technology for lightweight Internet of Things (IoT) communications in narrowband-IoT (NB-IoT) systems deployed in rugged terrain. In such UAV-assisted NB-IoT systems, the optimal UAV placement and resource allocation play a critical role. Consequently, the joint optimization of the UAV placement and resource allocation is considered in this study to improve the system capacity. Because the considered optimization problem is an NP-hard problem and owing to its non-convex property, it is difficult to optimize both the UAV placement and resource allocation simultaneously. Therefore, a competitive clustering algorithm has been developed by exchanging strategies between the UAV and the adjacent IoT devices to optimize the UAV placement. With multiple iterations, the UAV and the IoT devices within the coverage area of the UAV, converge their clustering strategies, which are suboptimal, to satisfy both sides. The bordering IoT devices of the adjacent clusters are then migrated heuristically toward each other to obtain the optimal system capacity maximization. Finally, the transmission throughput is optimized using the Nash equilibrium. The simulation results demonstrate that the algorithms proposed in this study exhibit rapid convergence, within 10 iterations, even in a large environment. The performance evaluation demonstrates that the proposed scheme improves the system capacity of the existing schemes by approximately 28%.
1. Introduction
Unmanned aerial vehicle (UAV)-assisted communications have gained widespread attention for their contribution toward human convenience and efficient line-of-sight (LoS) links [1] from the air to the ground. In addition, in various fields, such as agriculture and logistics, the use of UAVs is popular and common, and virtually essential [2,3]. Therefore, extensive research on UAV communications in wireless systems has been carried out recently to serve mobile users in complex urban areas as well as remote locations, where terrestrial communication is extremely difficult. This issue is more critical in Internet of Things (IoT) systems because IoT devices are typically limited to small battery capacities and therefore, are used in short-distance communication [4,5]. Additionally, lightweight IoT devices are deployed to collect field information in the cases of natural disasters and other emergency situations [6,7,8,9,10]. The utilization of UAVs to assist such IoT systems with the narrowband-IoT (NB-IoT) technology is a novel solution [11,12].
The UAV placement and subchannel assignment are essential factors to be considered in order to improve the system capacity and to achieve efficient UAV utilization and high performance in the NB-IoT system [13]. The IoT devices form a cluster corresponding to the deployment location of the UAV, which transitions to an optimization problem for efficient resource utilization. Essentially, after calculating the optimal location of the UAV through an efficient clustering algorithm, an improved multiple UAV-assisted NB-IoT system can be derived by solving the problem of optimal resource allocation in clustering. In previous studies [14,15], the UAV placement was optimized by solving the clustering problem of the IoT devices by using the K-mean traditional clustering method. The optimal subchannel assignment was then performed for the fixed cluster set, based on the corresponding clustering method. However, these techniques do not consider the total system-wise optimization that can be achieved by an iterative algorithm. In addition, since considered optimization problem is an NP-hard problem and has non-convex property, it is difficult to optimize both the UAV placement and resource allocation simultaneously. In particular, the positional relationship between the UAV and the IoT devices, which is initially determined, affects the throughput in communication [16,17,18,19,20]. Therefore, this paper proposes a heuristic algorithm that iteratively converges to a suboptimal UAV placement based on a game-theoretic approach to overcome this problem.
The Stackelberg game model is a non-cooperative game theory model consisting of a leader who decides the preemptive strategy and a follower who chooses the best strategy for each or common interest according to the leader’s preemptive strategy [21,22]. The leader considers the strategies of their followers and decides on a strategy which maximizes own profits. The determined strategy is passed on to all followers, and the followers re-establish the strategy based on a preemptive strategy in non-cooperative and competitive state. This process is iterated until the strategies of both side are no more changes and converged. The convergence of the two sides to a state of strategic equilibrium where they choose the best strategy is called the Nash Equilibrium (NE). In this model, UAV roles the leader and IoT devices role the followers.
In previous studies [23,24], a solution of joint optimization problem for energy efficiency and task allocation, and the solution of joint optimization problem for path planning and access point selection based on quality of service (QoS) was proposed. In both studies, due to the joint optimization problem which has nature of both NP-hard problem and high complexity, game theoretic approach is considered with cooperative rule and deep reinforce learning (DRL), respectively. However, in the competition system for subchannel allocation, the coalition formation game model is not suitable. In addition, it is necessary to consider clustering of UAVs in the total system along with UAVs that become massive.
Therefore, the algorithm proposed in this study involves the exchange of competitive strategies between the UAV and each IoT device within the coverage of the UAV to obtain the optimal IoT device clusters corresponding to the system capacity maximization with Stackelberg game theoretic approach.
The contributions of this paper are summarized as follows.
- Based on the assumption that a UAV is placed at the center of the IoT cluster within its coverage area, we developed a competitive clustering algorithm for all the UAVs and IoT devices in the network. The IoT devices determine the UAV that can maximize the transmission throughput. The UAV simultaneously calculates the optimal placement in order to minimize the power consumption (i.e., the maximum operation time) when all the IoT devices within the coverage area are considered. Therefore, the challenges of joint optimization of UAV-related problems can be resolved based on Stackelberg game theoretic approach in competitive environment.
- The adjacent clusters are then heuristically calculating to contain the non-clustered IoT devices so as to obtain the optimal system capacity maximization. The distance between the UAV and the non-clustered IoT devices is calculated, the UAV energy consumption and system capacity maximization are considered, and the non-clustered IoT devices are assigned to the appropriate cluster based on Stackelberg game theoretic approach based on Nash equilibrium.
- The simulation results demonstrate that the proposed algorithm exhibits rapid convergence to the suboptimal solution and is observed to significantly increase the system performance by approximately 28% when compared to the existing methods.
This paper consists of the following sections. In Section 2, the overall clustering and containing algorithms are formulated. The design of the total optimization of the cluster-based multiple UAV placement is presented in Section 3. Subsequently, the performance of the proposed algorithms is evaluated in Section 4. Finally, the conclusion and future scope are presented in Section 6.
2. System Model and Problem Formulation
This paper proposes a multiple UAV-assisted IoT system composed of M UAVs and N IoT nodes, as shown in Figure 1. In this system model, it is assumed that a ground station (GS) manages and controls all the UAVs. That is, the channel state information (CSI) and the state information of the UAVs are periodically updated to the GS. We also assume that the CSI is constant over the timeframe. In this scenario, the coverage area of the UAV is determined by the altitude of the UAV that manages the IoT cluster. Furthermore, it is assumed to exclude uncertain environmental factors such as strong wind, thunder strike, etc., because we assumed that GS also control the external environmental factors. As a result, the energy consumption of the UAV for communication with an IoT node varies depending on the altitude and location of the UAV.
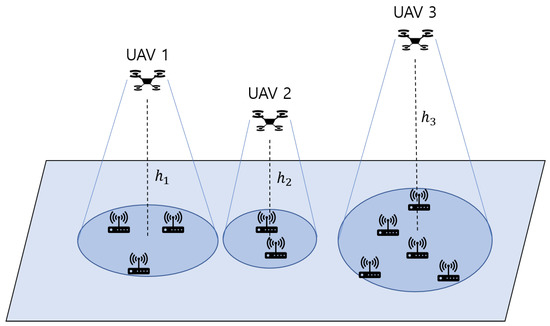
Figure 1.
Proposed multi unmanned aerial vehicle (UAV)-assisted IoT system.
2.1. System Model
and denote the sets of M UAVs and N IoT nodes, respectively. denotes the height of UAV m from the ground. The set of IoT nodes that are served by the UAV m is denoted by . The 3D coordinates of the UAV m and IoT node n are expressed by and , respectively. The distance between the mth UAV and the nth IoT node on the ground can be expressed by projecting in the x-y plane as follows:
Therefore, the distance in 3D coordinates is calculated as follows:
In the proposed system model, it is assumed that the communication between UAVs and IoT nodes follows the LoS link model. The channel gain, , from the IoT node n to the UAV m on the subchannel k is as follows:
where is the unit power gain over the reference distance ( is unit distance, i.e., 1 m) [1,25,26,27].
Considering the inter-channel interference, each subchannel can be assigned only one node in a cluster, which means that the interference between the nodes in the same cluster can be ignored. The interference among the nodes using the same subchannel in different clusters was analyzed in a previous study [15]. Let denote the subchannel allocation indicator; implies that the IoT node, n, is in the cluster set, , which is allocated to subchannel, k. Otherwise, is 0. Consequently, the interference, , in the transmission from the IoT node n to the UAV m on the subchannel k can be denoted as follows:
where is the transmission energy consumption of the subchannel k between the UAV m and IoT node n. Therefore, the signal to interference and noise ratio (SINR) between the mth UAV and the nth IoT node on the subchannel k can be denoted as follows:
where is the variance of additive white Gaussian noise (AWGN).
2.2. Problem Formulation
In this section, we devise the clustering problem for IoT nodes by considering the placement of UAVs to maximize the total capacity and minimize the total energy consumption of a multi-UAV-assisted IoT network. Following Shannon’s capacity theorem, the communication capacity between the UAV m and the IoT node n is calculated as follows:
Consequently, the total capacity of the system, , can be expressed as follows:
According to Equation (7), the following constraints should be considered to maximize the total system capacity: The minimum height of the UAVs should be determined to avoid conflict with various physical obstacles such as trees, telegraph poles, and transmission towers. Conversely, if the UAVs are too high, the UAVs are much more difficult to control and the battery consumption is increased. Therefore, the height constraint of the UAVs can be represented as follows:
where and denote the minimum and maximum heights of UAV m, respectively. Because a multi-UAV-assisted communication system is considered in this study, the horizontal distance between UAVs that are close to each other must be constrained to avoid collisions. Therefore, the constraint of the horizontal distance among the UAVs can be represented as follows:
where is the minimum distance between two different arbitrary UAVs. To avoid management conflicts, each IoT node should be included in only one cluster. This constraint is expressed as follows:
As mentioned earlier, each subchannel can be assigned only one node in a cluster. Therefore, the constraint can be expressed as follows:
As shown in Figure 2, denotes the radius of the coverage area of the UAV m, and it can be calculated by the beamwidth that is received from the UAV’s antenna as follows:
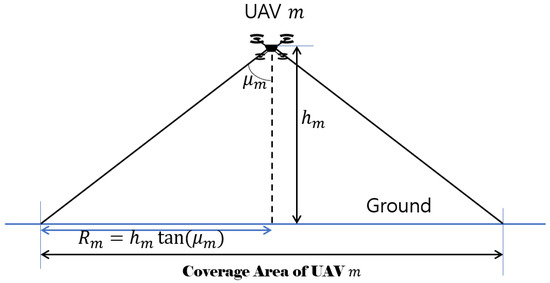
Figure 2.
Coverage area of UAV m on the ground. denotes the altitude of the UAV m. denotes a half beamwidth received from the UAV’s antenna. m. Therefore, is calculated as the radius of the UAV’s coverage area.
Therefore, the distance between the UAV m and the IoT node n is adjusted from 0 to as follows:
Finally, a capacity threshold is set for each IoT node to avoid unnecessary resource assignment. Let and denote the maximum and minimum capacity requirements of each IoT node, respectively. Therefore, the capacity requirement constraint can be expressed as follows:
Consequently, the objective function to maximize the total capacity of the system can be constructed as follows:
satisfying the above constraints (8)–(11) and (13).
This problem contains the binary indicator and the interference model within the sum of the logarithmic functions. That is, the problem is non-convex, and the optimization of clustering has been proved to be an NP-hard problem [28,29]. To overcome this issue, a competitive clustering algorithm is proposed to obtain the optimal 3D coordinates of the UAVs that are resolved by the Stackelberg game theoretic approach in Section 3.
3. Competitive Clustering-Based Uav Placement with Stackelberg Game Theoretic Approach
This section presents a heuristic and an iterative game theoretic method to obtain the suboptimal 3D coordinates of the UAVs. Initially, the UAVs and the IoT nodes are distributed randomly through the air and the ground, respectively. Each of the individual IoT nodes and UAVs consider only their own profit to serve their tasks. The objective of the UAVs is to achieve high capacity and low energy consumption and the objective of the IoT nodes is to achieve a high beamwidth. Therefore, an iterative exchange is performed between the UAVs and the IoT nodes within the coverage of the UAVs until the objectives of both the UAVs and IoT nodes are satisfied. These heuristic clustering strategies are applied with respect to the total system throughput achievement and adjust the 2D locations and the altitudes of the UAVs.
3.1. Initial Uavs and Iot Nodes Deployment
In the proposed system, the UAVs and IoT nodes are initially deployed in air and on the ground with random coordinates. As described in Algorithm 1 lines 1–3, the perfect information situation is assumed, such that the state information such as the location of the UAVs and the IoT nodes is already known to the GS (i.e., information sharing procedure, association procedure, etc.). Therefore, the initial IoT node cluster is automatically set. To focus on maximizing the total capacity of the system, we consider the initial clustering method that is concerned with channel gain. From (3), it can be inferred that the channel gain is inversely proportional to the distance. Therefore, the usage of the mean-shift clustering method, which has the advantage of low complexity to form the initial IoT node clusters, is preferred. Notably, the proposed mean-shift clustering method is applicable to other algorithms such as the K-means algorithm and random clustering with using Gaussian kernel as follow:
However, the proposed algorithm considers dense ground areas, due to which the mean-shift clustering algorithm is used as the initial method. The state information of the UAV in 2D coordinates is then automatically located at the center of the cluster, as follows:
where denotes the size of the set .
| Algorithm 1 Stackelberg Game Theoretic Clustering Algorithm |
Step 1: Initiation state information of UAVs and IoT nodes
|

Figure 3.
Comparison of the placement optimizing algorithm. Based on the traditional clustering method, the non-clustered node is included in Cluster 1 because is shorter than as shown in Figure 3a. However, after clustering, the distance differs from , as shown in Figure 3b. Therefore, optimal clustering cannot be ensured. However, suboptimal clustering can be guaranteed if the proposed method is followed by considering the capacity and energy consumption, denoted as and , respectively.
3.2. Optimization of Uav Placement
The basic concept of the underlying algorithm is to calculate the capacity and energy consumption for all the placements. From the initial cluster, each UAV calculates its capacity and energy consumption. The capacity problem has already been defined, as shown earlier. However, the energy consumption is related to the channel gain. As the channel gain is inversely proportional to the height of the UAV, the height of the UAV must be as low as possible while still satisfying the constraints. In order to perform clustering with the game theoretic approach, is considered as a set of strategies from a game-theoretic perspective. It is assumed that the GS controls the strategy exchange and shares the information. As shown in Algorithm 1 line 5, it is assumed that the profit of the UAV is the maximization of the total throughput of all the IoT nodes within the coverage of the UAV. Therefore, the utility function of the UAV is defined as follows:
where is the weight factor of the UAV, and is the optimal height of the UAV m that satisfies the constraints (8). Similarly, as shown in Algorithm 1 line 7, it is assumed that the objective of the IoT nodes is the maximization of the capacity and the beamwidth received from the UAV with which the IoT node aims to establish a stable subchannel. Therefore, the utility function of an IoT node is defined as follows:
where is the weight factor of the IoT node, and is the provisional height received from the UAV. Consequently, the UAVs and IoT nodes attempt to maximize the capacity of the total system and also derive optimal clustering by considering their own objectives. As shown in Algorithm 1 lines 4–9, and each of the IoT nodes exchange their strategies via the GS until the optimal solution is found. In this competitive and non-cooperative game theoretic scheme, empirical stability must be established from the average value of the best strategies determined by the Stackelberg equilibrium (SE), which is near-optimal, rather than by deriving the NE [22]. Subsequently, as shown in Algorithm 1 line 11, optimization is performed for the remaining UAV cluster for total capacity maximization considering the maximum capacity between the remaining IoT nodes that are not included in the UAV cluster. Therefore, each individual IoT device and can find their suboptimal cluster set and do not change their strategy at every iteration. Because the proposed algorithm is an NP-hard problem and owing to its non-convex property, the convergence and stability are confirmed through the simulation in Section 4.
4. Simulation Results
This section demonstrates the performance of the proposed algorithm using a simulator that is developed using MATLAB and C++. In the simulations, the field size of the proposed system model was 1000 m m, and a diverse number of IoT nodes were randomly distributed in the 2D-field. The fixed beamwidth of the receiving antenna was set to for each UAV, and the altitude constraint of each UAV was in the range of m and m. The minimum distance between two different UAVs was set to m to prevent collisions. The weight factor and of UAV and IoT devices are set to between 0 to 1. The unit power gain was set to [15]. The bandwidth B was also assumed to be 20 MHz for each cluster. The simulation parameters mentioned above are listed in Table 1.

Table 1.
Simulation Parameters.
With the Stackelberg game theoretic approach, the number of iterations to achieve the suboptimal convergence is shown in Figure 4. The actual number of iterations of the algorithm demonstrates that the algorithm can achieve a suboptimal clustering solution after a finite number of iterations. The simulation result is obtained by setting and setting the number of IoT nodes from to , that is from a small environment to a large environment. The detailed description of the simulation setup is provided in Section 4. As shown in the Figure 4, the number of iterations required for the convergence of the total throughput of the system increases according to the number of UAVs and IoT nodes. However, the number of UAVs has little effect on the number of iterations when compared to the number of IoT nodes. In addition, the number of iterations converges when , regardless of the number of UAVs. The evaluation was performed 100 times for each distribution of the IoT nodes, and then the results were averaged. The evaluated results show that the proposed algorithm can obtain suboptimal results within 10 iterations, even with a large number of IoT nodes.
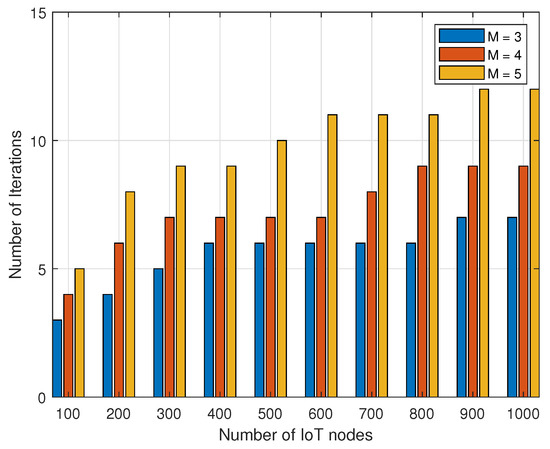
Figure 4.
Average iteration number for convergence of the proposed algorithm with from to 1000.
Additionally, the total system capacity was compared with that of another relevant scheme proposed in [15]. Duan et al. [15] applied non-orthogonal multiple access (NOMA) technology to increase the total system capacity through competitive resource allocation and UAV placement. This model uses a method of allocating subchannels within the cluster through M:N matching. At this time, each channel creates a preference list for IoT devices based on the channel gain, and subchannels are allocated to IoT device according to the created preference list. They then conducted a performance comparison between the OMA and the NOMA schemes. For comparison with this model, the experimental setup was established and the proposed algorithm was applied to the OMA scheme and the Stackeblerg game theoretic approach-based clustering algorithm was applied to the NOMA scheme, as depicted in Figure 5. The results demonstrate that the proposed algorithm improves the overall performance of Duan’s scheme as well as the performance of the OMA scheme by applying the joint clustering and subchannel allocation algorithm when compared to the original NOMA scheme. In particular, the performance of the NOMA and OMA schemes were improved by approximately 17.0% and 28.3%, respectively.
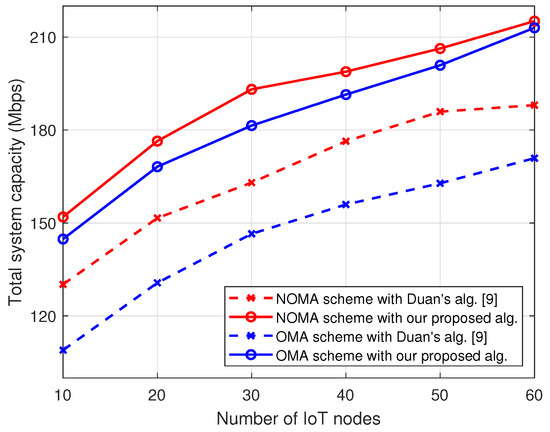
Figure 5.
Total system capacity versus the number of IoT nodes compared with other schemes.
Figure 6 shows the improvement in the total capacity for the mean-shift clustering method and the K-mean clustering method with the application of the proposed algorithm. Figure 6a shows that the number of UAVs set, was changed from to , and Figure 6b shows that the number of IoT nodes set, was changed from to in the field. This result shows that the proposed algorithm has improved the performance of the traditional clustering method by approximately 28%. That is, the proposed algorithm can be applied to existing infrastructure to increase the efficiency of the capacity. A higher improvement ratio was observed when the result was applied to the mean-shift method when compared to the K-mean method. Therefore, the proposed algorithm improves performance regardless of the basic clustering algorithm.
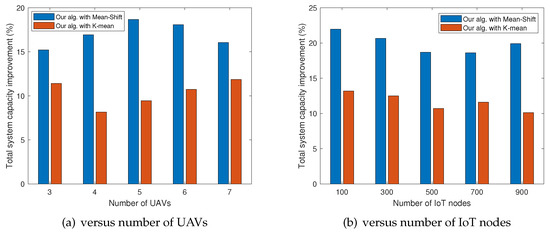
Figure 6.
Comparison of total system capacity improvement versus the number of IoT nodes and UAVs.
5. Discussion
Solving joint optimization problems in the multi-UAVs system is an NP-hard and is highly complex. Therefore, it can be confirmed that many studies use game theory to solve it heuristically. Unlike the cooperative game theoretic approach so far, the proposed algorithm in this paper adopts a method for obtaining an equilibrium according to the preemptive strategy of UAV in as system where IoT devices compete. In particular, in the clustering technique, while traditional studies calculate the optimal solution through simple physical distances, this paper proposed the method that profits and losses of UAVs and IoT devices are actually measured not only in terms of energy consumption and allocation channel as compensation, but also total system throughput. However, it is a practical limitation to exclude variable factors through the assumption of variables not considered in the objective function, such as environmental factors or interference.
The proposed clustering and joint optimization algorithm based on Stackelberg game theoretic approach has significantly improved the performance by considering the total system even though it has limited environmental factors and derived suboptimal equilibrium heuristically. In addition, the proposed algorithm is not cooperative among IoT devices, but competitive for maximizing own profits. Through this, it is noteworthy that the proposed algorithm guarantees a satisfaction of IoT device according to the profit-seeking strategy which is decided by itself. Moreover, the proposed algorithm can derive an equilibrium strategy with only the number of iteration around 10 times even in an massive IoT device environment. However, due to the iterative strategy exchange characteristics of the Stackelberg game model, the number of iterations eventually increases as the number of IoT or UAV increases. With investigating previous studies of NOMA scheme, it can be demonstrated that it has well performance with considering the total system throughput. However, it is necessary to check whether the individual performance and satisfaction of each IoT device is even.
In addition, it is considered that it will be a much novel study if we analyze performance results and simulation results for various scenarios through not only Gaussian kernels, but also variety kernels for mean-shift application. If so, the results in Figure 6 will be more diverse and accurate analysis can be performed. Furthermore, it is necessary to more accurately analyze the superiority and limitation of the proposed algorithm by increasing the number of comparison models. Although the NOMA scheme is a novel multiple access technique in the IoT networks using UAV, the proposed algorithm also should be compared and analyzed in other channel allocation environments.
However, as a result, the mean-shift clustering method and joint optimization using Stackelberg game theoretic approach showed 28% performance improvement compared to the previous model applied to the most popular NOMA scheme. In addition, it also proved that the convergence of equilibrium is fast even in a relatively large environment of 1000 IoT devices.
6. Concluding Remarks
In this paper, we proposed a competitive game-theoretic optimization of the UAV placement and subchannel allocation for multiple UAV-assisted NB-IoT systems. The UAV placement is decided based on the suboptimal strategies exchanged with the IoT devices to maximize the system capacity and profits. With mean-shift clustering using Gaussian kernel and joint optimization algorithm based on Stackelberg game theoretic approach, the proposed algorithm significantly improves the system capacity by up to 28% and ensures that the optimization is achieved within 10 iterations even in various large environment such as agriculture and logistic field, massive smart manufacturing. In future work, energy harvesting and the beamwidth adjusting capabilities of UAVs should be considered in a comprehensive scenario considering more constants such as weather. Moreover, mean-shift application not only using Gaussian kernel but the other varius kernels that were not covered in this study should be analyzed in future works. In addition, heterogeneous IoT devices and their mobility should be facilitated.
Author Contributions
Conceptualization, C.L.(Chunghyun Lee) and G.J.; methodology, C.L.(Cheol Lee) and G.J.; validation, N.-N.D. and D.S.L.;writing—review and editing, C.L.(Chunghyun Lee); supervision, S.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Chung-Ang University Research Scholarship Grants in 2018 and was supported through BK21 FOUR (Fostering Outstanding Universities for Research) Program funded by Ministry of Education of Korea (No.I20SS7609062).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lin, X.; Yajnanarayana, V.; Muruganathan, S.D.; Gao, S.; Asplund, H.; Maattanen, H.-L.; Bergstrom, M.; Euler, S.; Wang, Y.-P.E. The sky is not the limit: LTE for unmanned aerial vehicles. IEEE Commun. Mag. 2018, 56, 204–210. [Google Scholar] [CrossRef]
- Perz, R.; Wronowski, K. UAV application for precision agriculture. Aircr. Eng. Aerosp. Technol. 2018, 91, 257–263. [Google Scholar] [CrossRef]
- Pouya, B.; Mehdi, F.; Kate, S.-M.; Vladimir, E. A transformation technique for the clustered generalized traveling salesman problem with applications to logistics. Eur. J. Oper. Res. 2020, 285, 444–457. [Google Scholar]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Dao, N.-N.; Na, W.; Tran, A.-T.; Nguyen, D.N.; Cho, S. Energy-efficient spectrum sensing for IoT devices. IEEE Syst. J. 2020. [Google Scholar] [CrossRef]
- Chandrasekharan, S.; Gomez, K.; Al-Hourani, A.; Kandeepan, S.; Rasheed, T.; Goratti, L.; Reynaud, L.; Grace, D.; Bucaille, I.; Wirth, T.; et al. Designing and implementing future aerial communication networks. IEEE Commun. Mag. 2016, 54, 26–34. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Gupita, L.; Jain, R.; Vaszkun, G. Survey of important issues in UAV communication networks. IEEE Commun. Surv. Tutor. 2015, 18, 1123–1152. [Google Scholar] [CrossRef]
- Lakew, D.S.; Sa’ad, U.; Dao, N.-N.; Na, W.; Cho, S. Routing in flying ad hoc networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2020, 22, 1071–1120. [Google Scholar] [CrossRef]
- Dao, N.-N.; Park, M.; Kim, J.; Cho, S. Adaptive MCS selection and resource planning for energy-efficient communication in LTE-M based IoT sensing platform. PLoS ONE 2017, 12, e0182527. [Google Scholar] [CrossRef]
- Sharama, V.; Kumar, R.; Kaur, R. UAV-assisted content-based sensor search in IoTs. Electron. Lett. 2017, 53, 724–726. [Google Scholar] [CrossRef]
- Motlagh, N.H.; Bagaa, M.; Taleb, T. UAV-based IoT platform: A crowd surveillance use case. IEEE Commun. Mag. 2017, 55, 128–134. [Google Scholar] [CrossRef]
- He, H.; Zhang, S.; Zeng, Y.; Zhang, R. Joint altitude and beamwidth optimization for UAV-enabled multiuser communications. IEEE Commun. Lett. 2017, 22, 344–347. [Google Scholar] [CrossRef]
- Wang, J.; Liu, M.; Sun, J.; Gui, G.; Gacanin, H.; Sari, H.; Adachi, F. Multiple unmanned aerial vehicles deployment and user pairing for non-orthogonal multiple access schemes. IEEE Internet Things J. 2020, 22, 1071–1120. [Google Scholar] [CrossRef]
- Duan, R.; Wnag, J.; Jiang, C.; Yao, H.; Ren, Y.; Qian, Y. Resource allocation for multi-UAV aided IoT NOMA uplink transmission systems. IEEE Internet Things J. 2019, 6, 7025–7037. [Google Scholar] [CrossRef]
- Jiang, B.; Yang, J.; Xu, H.; Song, H.; Zheng, G. Multimedia data throughput maximization in Internet-of-Things system based on optimization of cache-enabled UAV. IEEE Internet Things J. 2018, 6, 3525–3532. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar] [CrossRef]
- Tuyishimire, E.; Bagula, B.A.; Ismail, A. Optimal clustering for efficient data muling in the Internet-of-Things in motion. In Proceedings of the International Symposium on Ubiquitous Networking, Hammamet, Tunisia, 2–5 May 2018; pp. 359–371. [Google Scholar]
- Ebrahimi, D.; Sharafeddine, S.; Ho, P.-H.; Assi, C. UAV-aided projection-based compressive data gathering in wireless sensor networks. IEEE Internet Things J. 2018, 6, 1893–1905. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Mobile Internet of Things: Can UAVs provide an energy-efficient mobile architecture? In Proceedings of the Global communications conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Gibbons, R. A Primer in Game Theory; Harvester Wheatshead: New York, NY, USA, 1992. [Google Scholar]
- Lee, C.; Park, L.; Cho, S. Light-Weight Stackelberg Game Theoretic Demand Response Scheme for Massive Smart Manufacturing Systems. IEEE Access 2018, 6, 23316–23324. [Google Scholar] [CrossRef]
- Luan, H.; Xu, Y.; Liu, D.; Du, Z.; Qian, H.; Liu, X.; Tong, X. Energy Efficient Task Cooperation for Multi-UAV Networks: A Coalition Formation Game Approach. IEEE Access 2020, 8, 149372–149384. [Google Scholar] [CrossRef]
- Zhu, S.; Gui, L.; Cheng, N.; Sun, F.; Zhang, Q. Joint Design of Access Point Selection and Path Planning for UAV-Assisted Cellular Networks. IEEE Inernet Things J. 2020, 7, 220–223. [Google Scholar] [CrossRef]
- Bor-Yaliniz, R.I.; El-Keyi, A.; Yanikomeroglu, H. Efficient 3-D placement of an aerial base station in next generation cellular networks. In Proceedings of the International Conference on Communications (ICC), KualaLumpur, Malaysia, 22–27 May 2016; pp. 1–5. [Google Scholar]
- Wang, J.; Jiang, C.; Wei, Z.; Pan, C.; Zhang, H.; Ren, Y. Joint UAV hovering altitude and power control for space-air-ground IoT networks. IEEE Internet Things J. 2018, 6, 1741–1753. [Google Scholar] [CrossRef]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef]
- Karp, R.M. Reducibility among combinatorial problems. In Proceedings of the a Symposium on the Complexity of Computer Computations, Yorktown Heights, New York, 20–22 March 1972; pp. 85–103. [Google Scholar]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004; ISBN 978-051-180-444-1. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).