
Magnetic Elastomer Sensor for Dynamic Torque and Speed Measurements



Abstract
1. Introduction
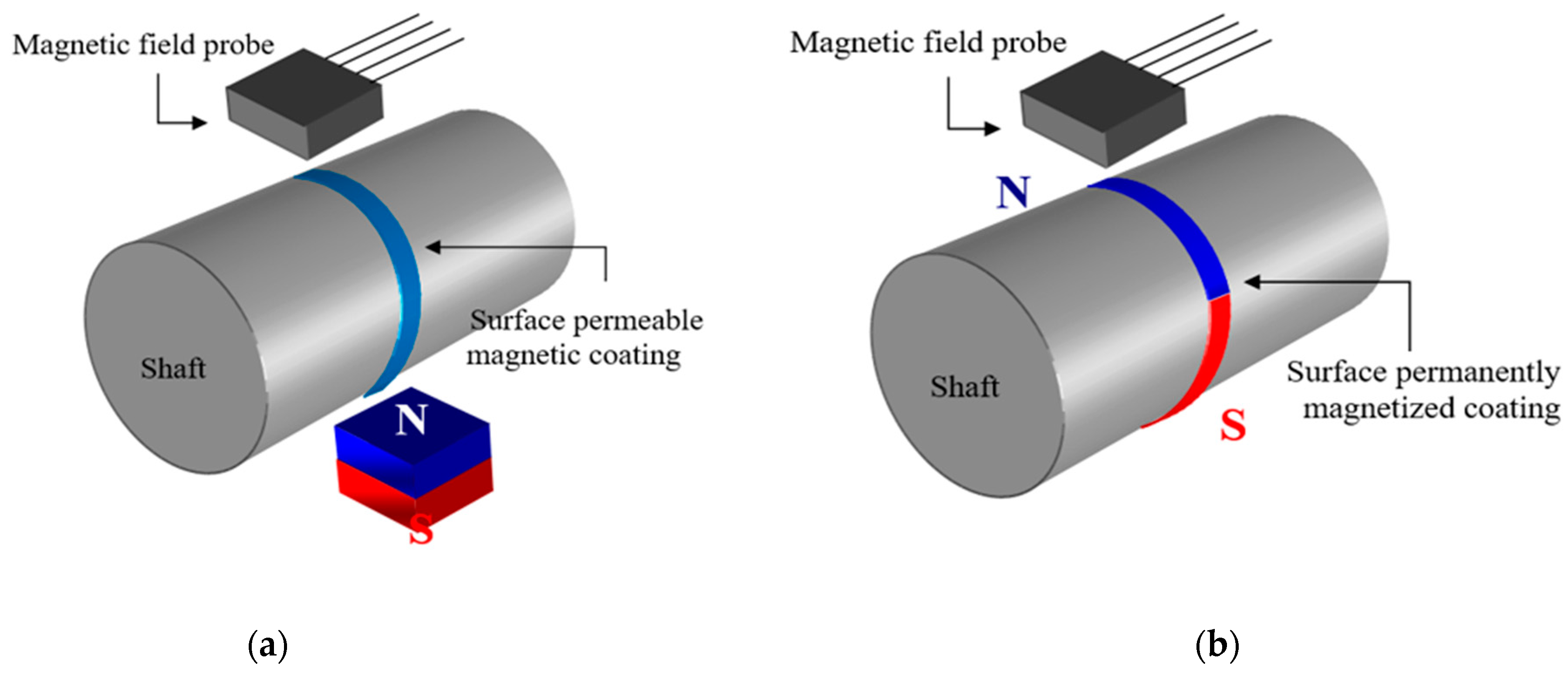
2. Magnetic Elastomer Sensor
3. Torque, Angle Position, and Rotational Speed Sensing
3.1. Angle Position Sensing
3.2. Rotational Speed Sensing
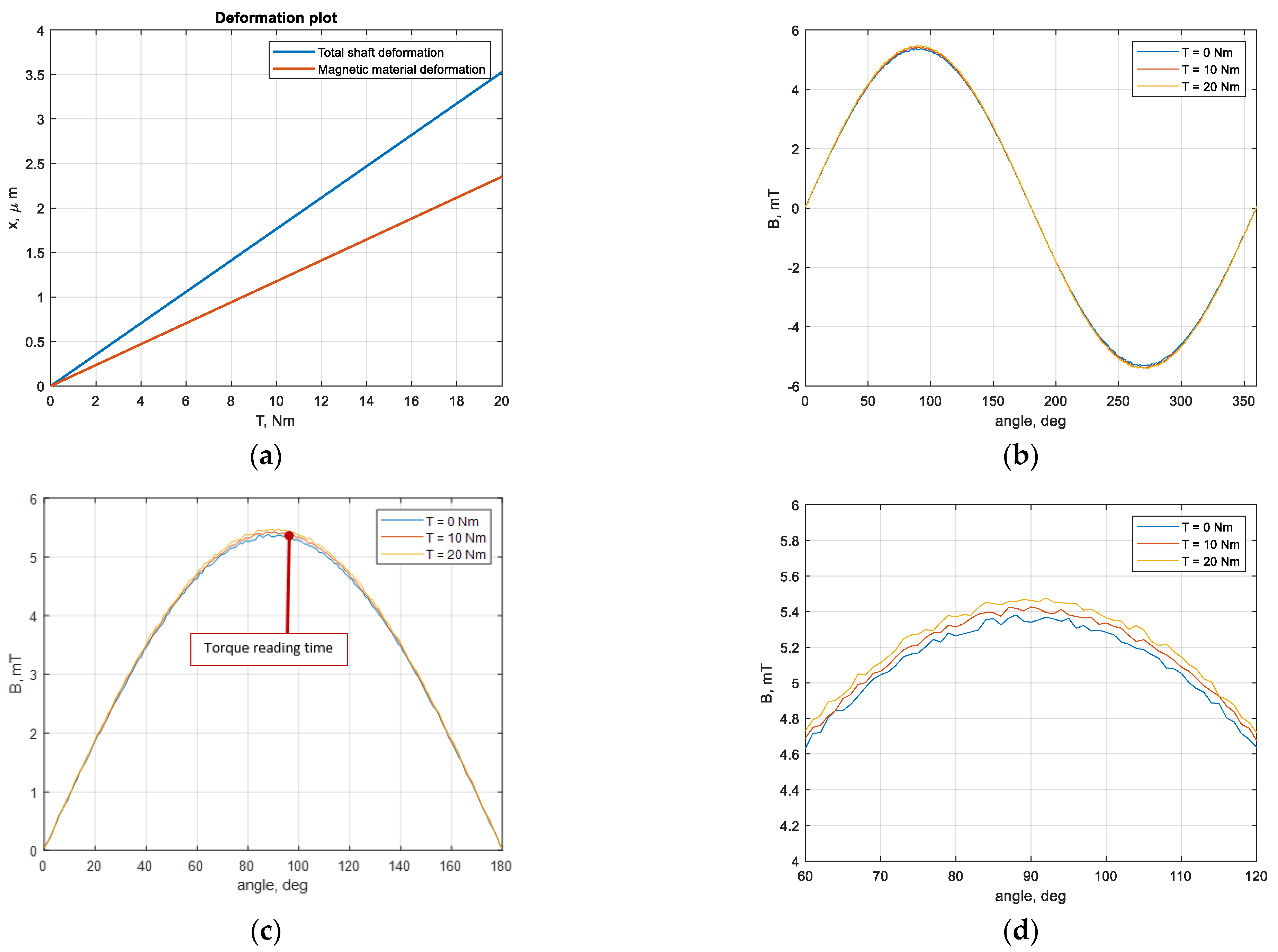
3.3. Torque Deformation Sensing
4. Magnetic Elastomer Material Preparation
5. Sensor Prototype
6. Sensor Numerical Modeling
7. Sensor Prototype Testing
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, C.; Lin, T.C.; Lin, T.; Lin, P. Design of a motor bracket multi-axis force/torque sensor. In Proceedings of the 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 305–307. [Google Scholar]
- Myers, D.R.; Pisano, A.P. Torque measurements of an automotive halfshaft utilizing a MEMS resonant strain gauge. In Proceedings of the TRANSDUCERS 2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009; pp. 1726–1729. [Google Scholar]
- Kim, I.; Kim, H.; Song, J. Design of joint torque sensor and joint structure of a robot arm to minimize crosstalk and torque ripple. In Proceedings of the 9th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Daejeon, Korea, 26–28 November 2012; pp. 404–407. [Google Scholar]
- Park, C.; Kyung, J.H.; Choi, T.; Do, H.M.; Park, D.; Kim, B. Study on the requirements of joint torque sensors considering mechanical condition of the joint mechanism of a manipulator. In Proceedings of the 12th International Conference on Control, Automation and Systems, JeJu Island, Korea, 17–21 October 2012; pp. 2114–2116. [Google Scholar]
- Sandakalum, T.; Suraji, S.; Weerasekara, I.; Lalitharatne, T.; Chathuranga, D. Design and Characterization of a 1-axis Compact Torque Sensor for a Collaborative Robot Arm. In Proceedings of the IEEE International Conference on Information and Automation for Sustainability (ICIAfS), Colombo, Sri Lanka, 21–22 December 2018; pp. 1–6. [Google Scholar]
- Kim, D.; Kim, B.; Hwang, J.; Kim, E. The new 2 DoF frame torque sensor for the Metacarpophalangeal joint in robotic hand. In Proceedings of the 8th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Incheon, Korea, 23–26 November 2011; pp. 556–559. [Google Scholar]
- Shvetsov, A.; Zhgoon, S.; Lonsdale, A.; Sandacci, S. Deformation sensitive cuts of quartz for torque sensor. In Proceedings of the IEEE International Ultrasonics Symposium, San Diego, CA, USA, 11–14 October 2010; pp. 1250–1253. [Google Scholar]
- Zi, X.; Zhao, S.; Geng, S.; Wu, L.; Pang, H. A Wireless Torque Sensor Based on Surface Acoustic Wave. In Proceedings of the International Conference on Wireless Communication and Sensor Network, Wuhan, China, 13–14 December 2014; pp. 326–329. [Google Scholar]
- Muro, H.; Saito, C.; Shimada, M.; Furuya, Y. Magnetostrictive-ring type torque sensor using two Hall ICs with differential magnetic field detection. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 412–415. [Google Scholar]
- Wang, Y.; Jang, W.; Huang, C. Lightweight Torque Sensor Based on a Gradient Grating Period Guided-Mode Resonance Filter. IEEE Sens. J. 2019, 19, 6610–6617. [Google Scholar] [CrossRef]
- Hoehn, K.; Olsson, A.; Arkwright, J.W. High Capacity Torque and Compression Measurements Using Fibre Optic Sensors. In Proceedings of the 2nd International Conference for Fibre-optic and Photonic Sensors for Industrial and Safety Applications (OFSIS), Brisbane, QLD, Australia, 8–10 January 2017; pp. 39–44. [Google Scholar]
- Leal-Junior, A.G.; Theodosiou, A.; Min, R.; Casas, J.; Díaz, C.R.; Dos Santos, W.M.; Pontes, M.J.; Siqueira, A.A.; Marques, C.; Kalli, K.; et al. Quasi-Distributed Torque and Displacement Sensing on a Series Elastic Actuator’s Spring Using FBG Arrays Inscribed in CYTOP Fibers. IEEE Sens. J. 2019, 19, 4054–4061. [Google Scholar] [CrossRef]
- Watanabe, K.; Hara, K.; Toyama, S. Novel Sheet-Type Torque Sensor Using Electrolyte. In Proceedings of the IEEE Sensors, Montreal, QC, Canada, 27–30 October 2019; pp. 1–4. [Google Scholar]
- Hein, M.; Park, J.; Cozzo, J.A.; Flatau, A.; Stadler, B.J.H. Electrodeposited Fe–Ga Alloy Films for Directly Coupled Noncontact Torque Sensing. IEEE Sens. J. 2019, 19, 6655–6661. [Google Scholar] [CrossRef]
- Arionfard, H.; Ramezani, H. Measuring Absolute Rotation and Torque in Series Elastic Actuators with a Single Sensor. IEEE Sens. J. 2020, 20, 14685–14693. [Google Scholar] [CrossRef]
- Flieh, H.M.; Totoki, E.; Lorenz, R.D. Dynamic Shaft Torque Observer Structure Enabling Accurate Dynamometer Transient Loss Measurements. IEEE Trans. Ind. Appl. 2018, 54, 6121–6132. [Google Scholar] [CrossRef]
- Al-Mai, O.; Ahmadi, M.; Albert, J. Design, Development and Calibration of a Lightweight, Compliant Six-Axis Optical Force/Torque Sensor. IEEE Sens. J. 2018, 18, 7005–7014. [Google Scholar] [CrossRef]
- Jiang, K.; Zhou, Y.; Han, L.; Li, L.; Liu, Y.; Hu, S. Design of a High-Resolution Instantaneous Torque Sensor Based on the Double-Eccentric Modulation Principle. IEEE Sens. J. 2019, 19, 6595–6601. [Google Scholar] [CrossRef]
- Ji, X.; Fan, Y.; Chen, J.; Han, T.; Cai, P. Passive Wireless Torque Sensor Based on Surface Transverse Wave. IEEE Sens. J. 2016, 16, 888–894. [Google Scholar] [CrossRef]
- Cao, K.; Deng, Y. Design and analysis of an automotive vibration reduction system based on magneto-rheological elastomer. In Proceedings of the International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1645–1649. [Google Scholar]
- Ausanioa, G.; Iannottia, V.; Ricciardib, E.; Lanottec, L.; Lanotte, L. Magneto-piezoresistance in Magnetorheological elastomers for magnetic induction gradient or position sensors. Sens. Actuators A Phys. 2014, 205, 235–239. [Google Scholar] [CrossRef]
- Li, R.; Zhou, M.; Wang, M.; Chen, S.; Yang, P. The Influence of Force and Magnetic Field on the Self-Sensing Characteristics of Magneto-Rheological Elastomer Bearing. In Proceedings of the Prognostics and System Health Management Conference (PHM-Chongqing), Chongqing, China, 26–28 October 2018; pp. 758–763. [Google Scholar]
- Zhu, X.; Liu, L.; Guo, H.; Xu, Z.; Hou, W.; Niu, L. Modeling and Analysis of an Electromagnetic Fully Variable Valve Train with a Magnetorheological Buffer. Electronics 2019, 8, 996. [Google Scholar] [CrossRef]
- Ralchev, M.; Mateev, V.; Marinova, I. 3D Printing of Magnetic Materials by FFF Technology. In Proceedings of the 2020 12th Electrical Engineering Faculty Conference (BulEF), Varna, Bulgaria, 9–12 September 2020; pp. 1–4. [Google Scholar]
- Mateev, V.; Marinova, I.; Saito, Y. Coupled Field Modeling of Ferrofluid Heating in Tumor Tissue. IEEE Trans. Magn. 2013, 49, 1793–1796. [Google Scholar] [CrossRef]
- Arslan Hafeez, M.; Usman, M.; Umer, M.A.; Hanif, A. Recent Progress in Isotropic Magnetorheological Elastomers and Their Properties: A Review. Polymers 2020, 12, 3023. [Google Scholar] [CrossRef]
- Muhazeli, N.S.; Nordin, N.A.; Ubaidillah, U.; Mazlan, S.A.; Abdul Aziz, S.A.; Nazmi, N.; Yahya, I. Magnetic and Tunable Sound Absorption Properties of an In-Situ Prepared Magnetorheological Foam. Materials 2020, 13, 5637. [Google Scholar] [CrossRef] [PubMed]
- Jamari, S.K.M.; Nordin, N.A.; Aziz, S.A.A.; Nazmi, N.; Mazlan, S.A. Systematic Review on the Effects, Roles and Methods of Magnetic Particle Coatings in Magnetorheological Materials. Materials 2020, 13, 5317. [Google Scholar] [CrossRef] [PubMed]
- Dohmen, E.; Kraus, B. Coupled Anisotropic Magneto-Mechanical Material Model for Structured Magnetoactive Materials. Polymers 2020, 12, 2710. [Google Scholar] [CrossRef]
- Bica, I.; Anitas, E.M.; Chirigiu, L. Hybrid Magnetorheological Composites for Electric and Magnetic Field Sensors and Transducers. Nanomaterials 2020, 10, 2060. [Google Scholar] [CrossRef]
- Kang, S.S.; Choi, K.; Nam, J.-D.; Choi, H.J. Magnetorheological Elastomers: Fabrication, Characteristics, and Applications. Materials 2020, 13, 4597. [Google Scholar] [CrossRef]
- Kwon, S.H.; Lee, J.H.; Choi, H.J. Magnetic Particle Filled Elastomeric Hybrid Composites and Their Magnetorheological Response. Materials 2018, 11, 1040. [Google Scholar] [CrossRef]
- Samal, S.; Škodová, M.; Abate, L.; Blanco, I. Magneto-Rheological Elastomer Composites: A Review. Appl. Sci. 2020, 10, 4899. [Google Scholar] [CrossRef]
- Yoon, J.-Y.; Hong, S.-W.; Park, Y.-J.; Kim, S.-H.; Kim, G.-W.; Choi, S.-B. Tunable Young’s Moduli of Soft Composites Fabricated from Magnetorheological Materials Containing Microsized Iron Particles. Materials 2020, 13, 3378. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Palacios-Pineda, L.M.; Perales-Martínez, I.A.; Martínez-Romero, O.; Olvera-Trejo, D.; Jiménez-Cedeño, I.H. Investigating the Mullins Effect and Energy Dissipation in Magnetorheological Polyurethane Elastomers. Int. J. Mol. Sci. 2020, 21, 5318. [Google Scholar] [CrossRef] [PubMed]
- Jeong, U.-C. Application of Adaptive Tuned Magneto-Rheological Elastomer for Vibration Reduction of a Plate by a Variable-Unbalance Excitation. Appl. Sci. 2020, 10, 3934. [Google Scholar] [CrossRef]
- Asadi Khanouki, M.; Sedaghati, R.; Hemmatian, M. Multidisciplinary Design Optimization of a Novel Sandwich Beam-Based Adaptive Tuned Vibration Absorber Featuring Magnetorheological Elastomer. Materials 2020, 13, 2261. [Google Scholar] [CrossRef] [PubMed]
- Zainudin, A.A.; Yunus, N.A.; Mazlan, S.A.; Shabdin, M.K.; Abdul Aziz, S.A.; Nordin, N.A.; Nazmi, N.; Abdul Rahman, M.A. Rheological and Resistance Properties of Magnetorheological Elastomer with Cobalt for Sensor Application. Appl. Sci. 2020, 10, 1638. [Google Scholar] [CrossRef]
- Song, B.-K.; Yoon, J.-Y.; Hong, S.-W.; Choi, S.-B. Field-Dependent Stiffness of a Soft Structure Fabricated from Magnetic-Responsive Materials: Magnetorheological Elastomer and Fluid. Materials 2020, 13, 953. [Google Scholar] [CrossRef]
- Jones, D.; Wang, L.; Ghanbari, A.; Vardakastani, V.; Kedgley, A.E.; Gardiner, M.D.; Vincent, T.L.; Culmer, P.R.; Alazmani, A. Design and Evaluation of Magnetic Hall Effect Tactile Sensors for Use in Sensorized Splints. Sensors 2020, 20, 1123. [Google Scholar] [CrossRef]
- Kukla, M.; Warguła, Ł.; Talaśka, K.; Wojtkowiak, D. Magnetorheological Elastomer Stress Relaxation Behaviour during Compression: Experiment and Modelling. Materials 2020, 13, 4795. [Google Scholar] [CrossRef]
- Qiao, Y.; Zhang, J.; Zhang, M.; Liu, L.; Zhai, P. A Magneto-Hyperelastic Model for Silicone Rubber-Based Isotropic Magnetorheological Elastomer under Quasi-Static Compressive Loading. Polymers 2020, 12, 2435. [Google Scholar] [CrossRef]
- Mateev, V.; Marinova, I. Magnetic Elastomer Sensor for Dynamic Torque Measurements in Magnetic Gears. In Proceedings of the 13th International Conference on Sensing Technology (ICST), Sydney, Australia, 2–4 December 2019; pp. 1–4. [Google Scholar]
- Mateev, V.; Marinova, I. Magnetic Elastomer Sensor for Dynamic Torque. In Proceedings of the 19th International Symposium on Electromagnetic Fields in Mechatronics, Electrical and Electronic Engineering (ISEF), Nancy, France, 29–31 August 2019; pp. 1–2. [Google Scholar]
- Yoo, B.; Na, S.; Flatau, A.B.; Pines, D.J. Evaluation of Magnetorheological Elastomers with Oriented Fe–Ga Alloy Flakes for Force Sensing Applications. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Murao, S.; Hirata, K.; Miyasaka, F. Analysis of Variable Stiffness Magnetorheological Elastomer Employing Particle Method and FEM. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Marinova, I.; Mateev, V. Thermo-Electro-Magnetic Convection in Electrically Conductive Ferrofluids. In Proceedings of the 22nd International Conference on the Computation of Electromagnetic Fields (COMPUMAG), Paris, France, 15–19 July 2019; pp. 1–4. [Google Scholar]
- Lacheisserie, T. Magnetostriction Theory and Applications of Magnetoelasticity; CRC Press, Inc.: Boca Raton, FL, USA, 1993. [Google Scholar]
- Li, R.C.; Cabrera, C.; Moron, A.; Garcia, A.; González, M. Magnetic Sensors Based on Amorphous Ferromagnetic Materials: A Review. Sensors 2015, 15, 28340–28366. [Google Scholar]
- Petrov, R.V.; Bichurin, M.I.; Leontiev, V.S.; Kolesnikov, N.A.; Milenov, I.K.; Bozhkov, S.T.; Stanev, L.G.; Pacheliev, V.T.; Bozhkov, P.T. The crankshaft position sensor based on magnetoelectric materials. In Proceedings of the IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, Bulgaria, 25–28 September 2016; pp. 848–853. [Google Scholar]
- Philips Semiconductors. Magnetic Field Sensors—General; Philips Semiconductors. Available online: https://www.mikrocontroller.net/attachment/33100/SC17_GENERAL_MAG_98_1.pdf (accessed on 25 January 2021).
- Mateev, V.; Marinova, I. Loss estimation of magnetic gears. Electr. Eng. 2020, 102, 387–399. [Google Scholar] [CrossRef]
- Aziz, S.A.A.; Mazlan, S.A.; Ubaidillah, U.; Mohamad, N.; Choi, S.-B.; Che Aziz, M.A.; Johari, M.A.F.; Homma, K. Thermal Aging Rheological Behavior of Magnetorheological Elastomers Based on Silicone Rubber. Int. J. Mol. Sci. 2020, 21, 9007. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern Type | Polynomic Interpolation Coefficients | Minimization Uncertainty Rms |
|---|---|---|
| Circumferential (0°) | a = 5.00 [μT/Nm]| b = 2.0 [μT] | 1.87% |
| Align with axis of rotation (90°) | a = 4.85 [μT/Nm]| b = 2.1 [μT] | 2.15% |
| Tilt pattern (45°) | a = 2.75 [μT/Nm]| b = 3.1 [μT] | 3.22% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mateev, V.; Marinova, I. Magnetic Elastomer Sensor for Dynamic Torque and Speed Measurements. Electronics 2021, 10, 309. https://doi.org/10.3390/electronics10030309
Mateev V, Marinova I. Magnetic Elastomer Sensor for Dynamic Torque and Speed Measurements. Electronics. 2021; 10(3):309. https://doi.org/10.3390/electronics10030309
Chicago/Turabian StyleMateev, Valentin, and Iliana Marinova. 2021. "Magnetic Elastomer Sensor for Dynamic Torque and Speed Measurements" Electronics 10, no. 3: 309. https://doi.org/10.3390/electronics10030309
APA StyleMateev, V., & Marinova, I. (2021). Magnetic Elastomer Sensor for Dynamic Torque and Speed Measurements. Electronics, 10(3), 309. https://doi.org/10.3390/electronics10030309