
Input-Series-Output-Parallel DC Transformer Impedance Modeling and Phase Reshaping for Rapid Stabilization of MVDC Distribution Systems


Abstract
:1. Introduction
- (1)
- Establish a GAM input impedance model for the ISOP DCT. The obtained model is accurate and programmable, which provides a theoretical basis for the stability analysis.
- (2)
- Propose an IPR method to modify the impedance phase, which weakens the negative resistance characteristic of the ISOP DCT. The ISOP DCT controller optimization (IDCO) method is investigated. Compared with the IDCO method, the proposed approach mitigates the MV bus voltage oscillation rapidly and improves the voltage quality of the ISOP DCT.
2. Impedance Modeling of the MVDC Distribution System
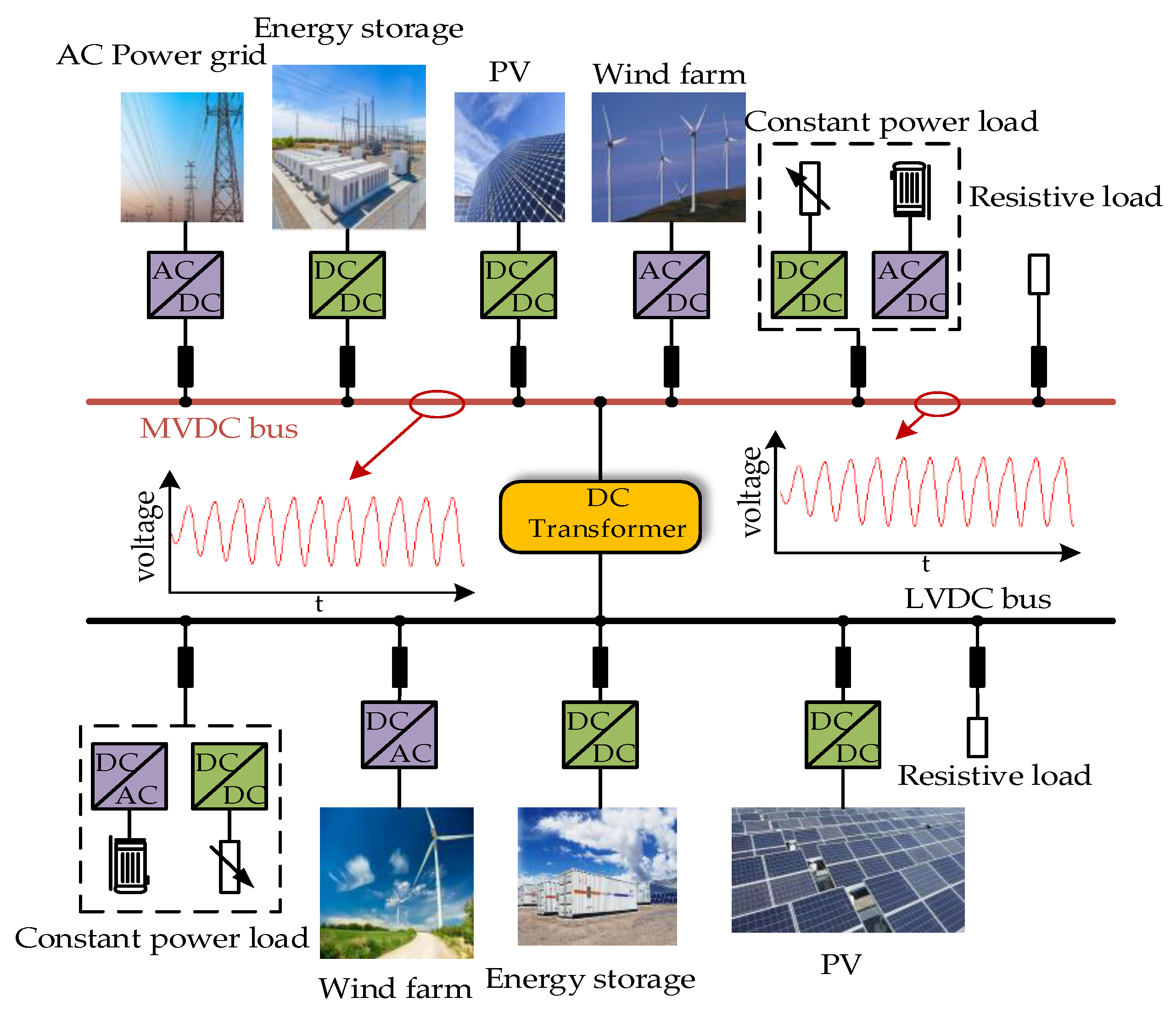
2.1. Configuration of the MVDC Distribution System
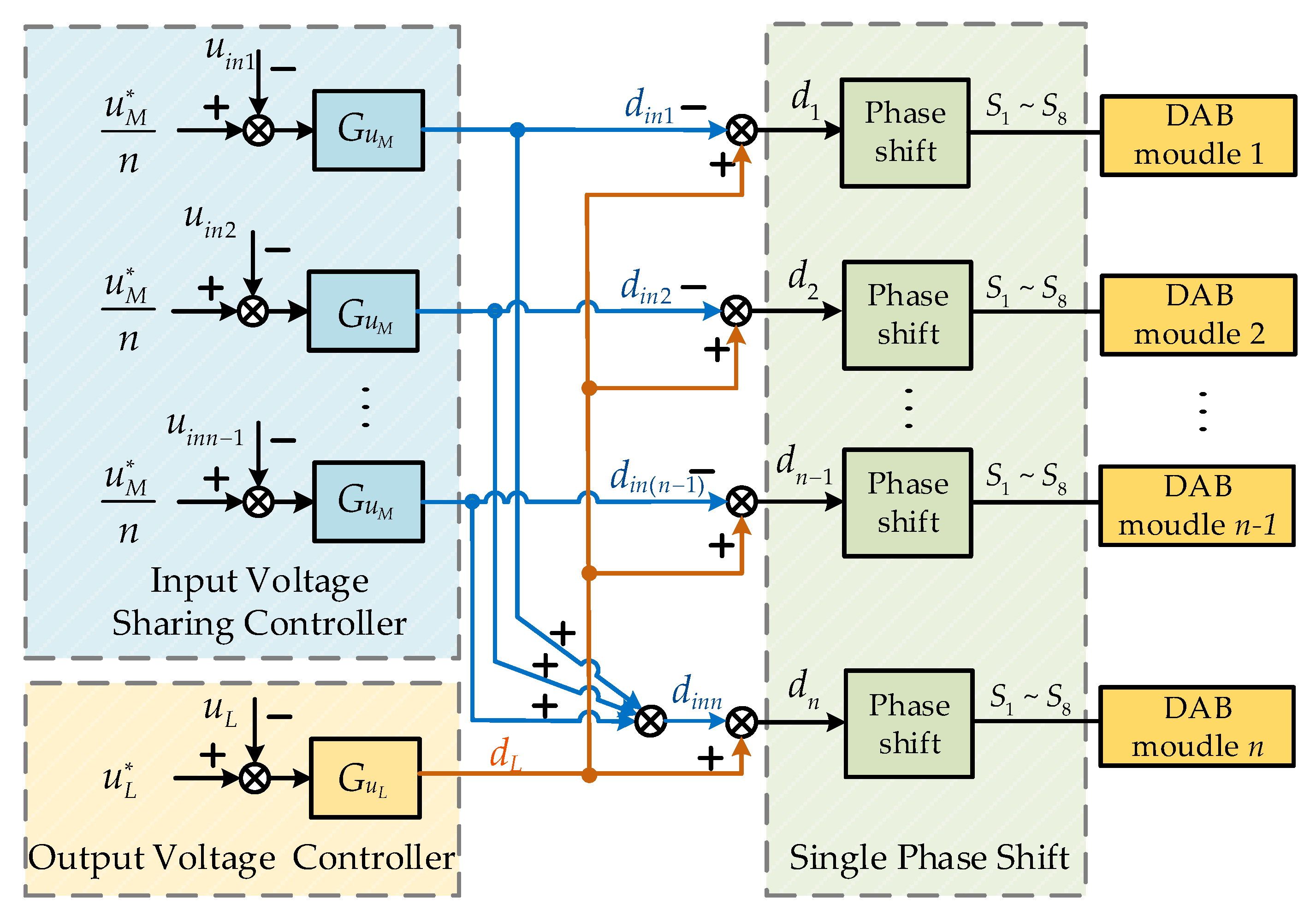
2.2. Generalized Average Modeling of the ISOP DCT
3. Stability Improvement via the IDCO Method
4. Proposed IPR Method
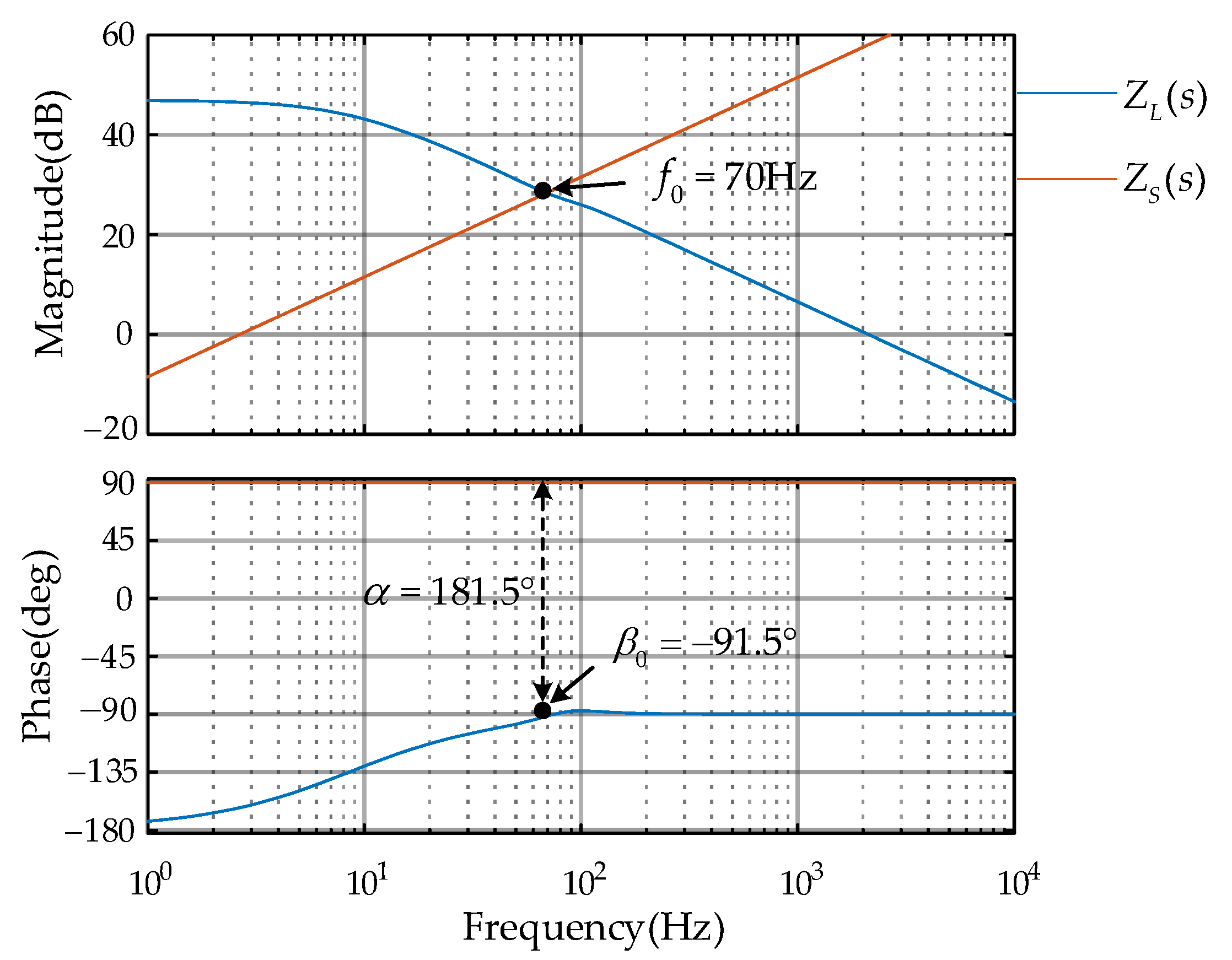
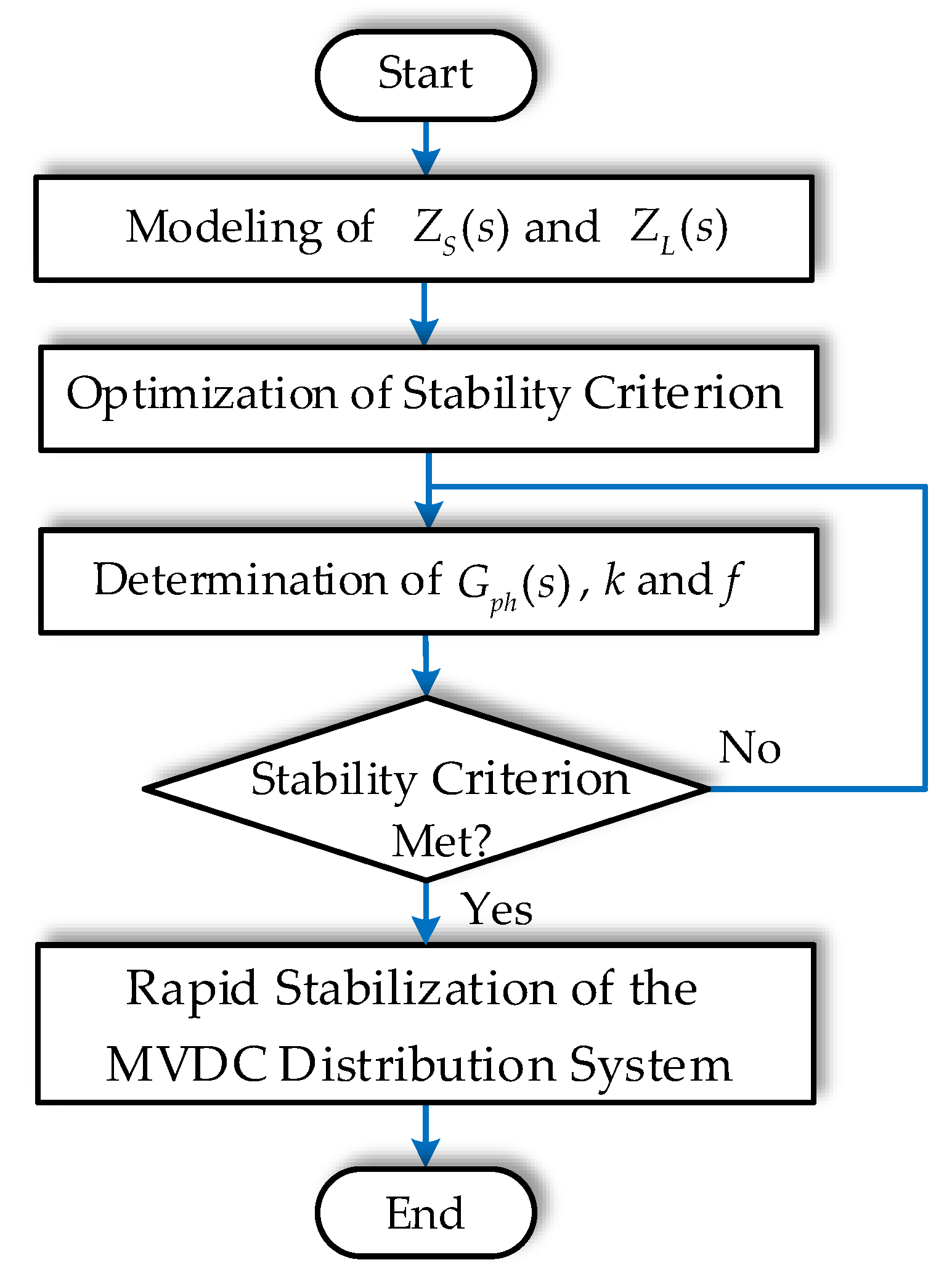
4.1. Optimization of the Stability Criterion
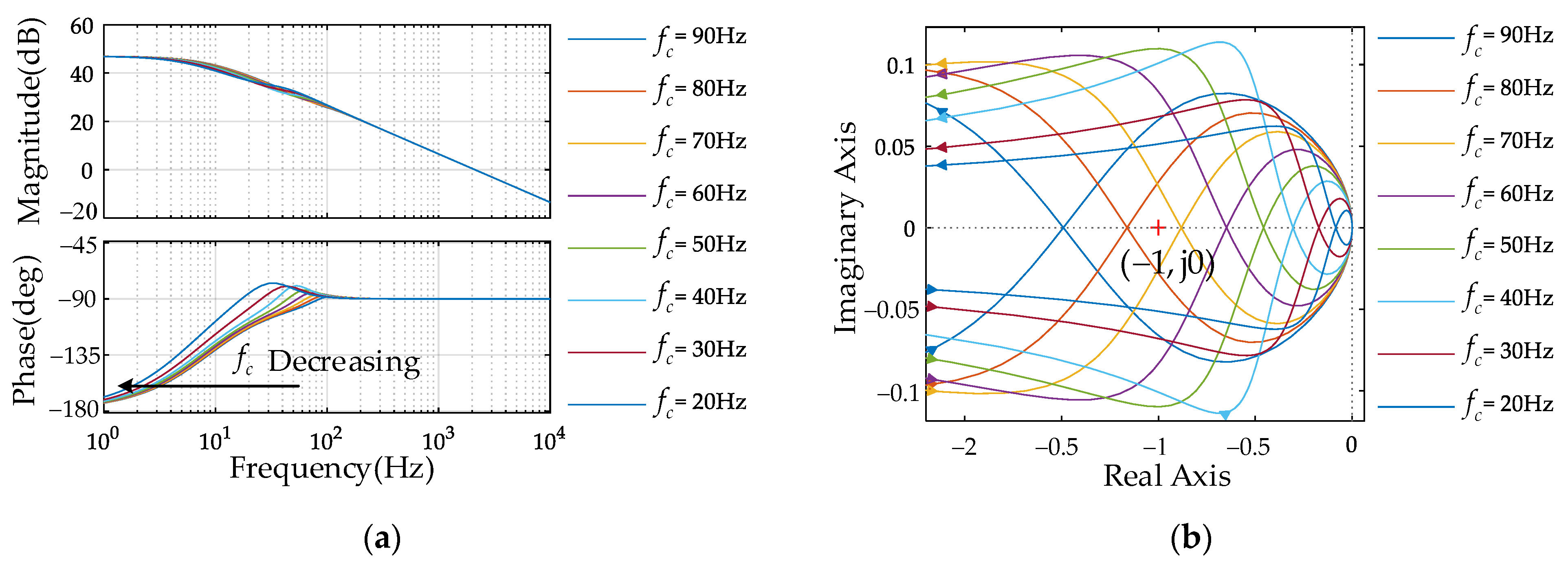
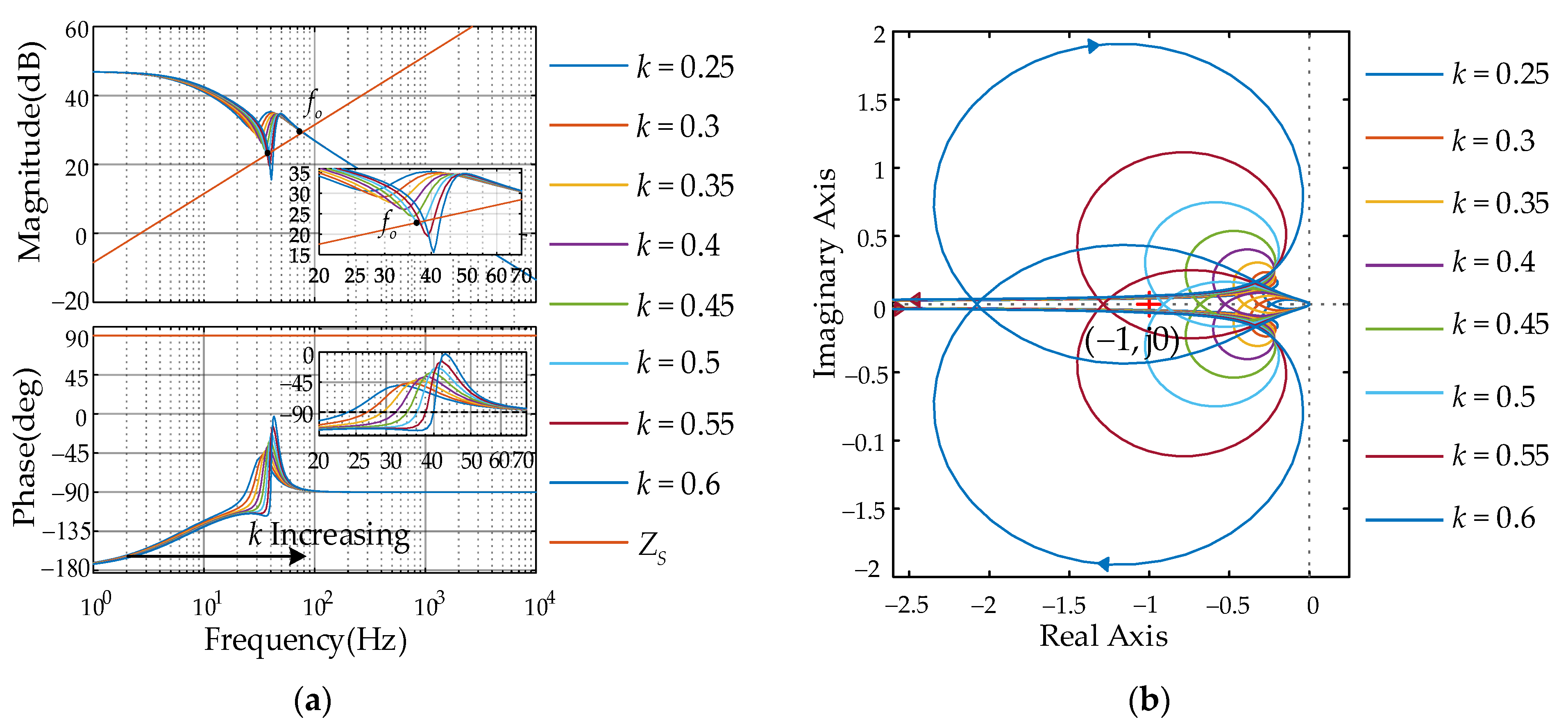
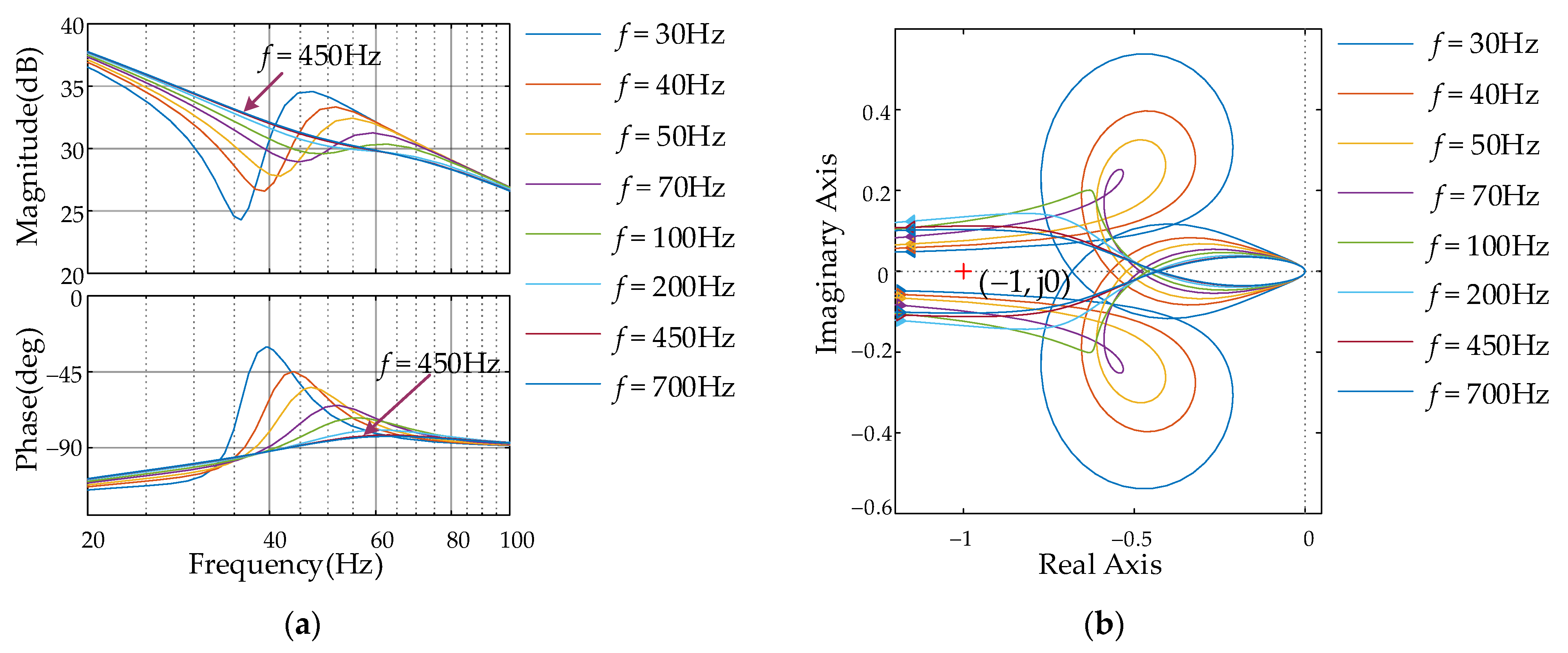
4.2. Design for the Impedance Phase Controller
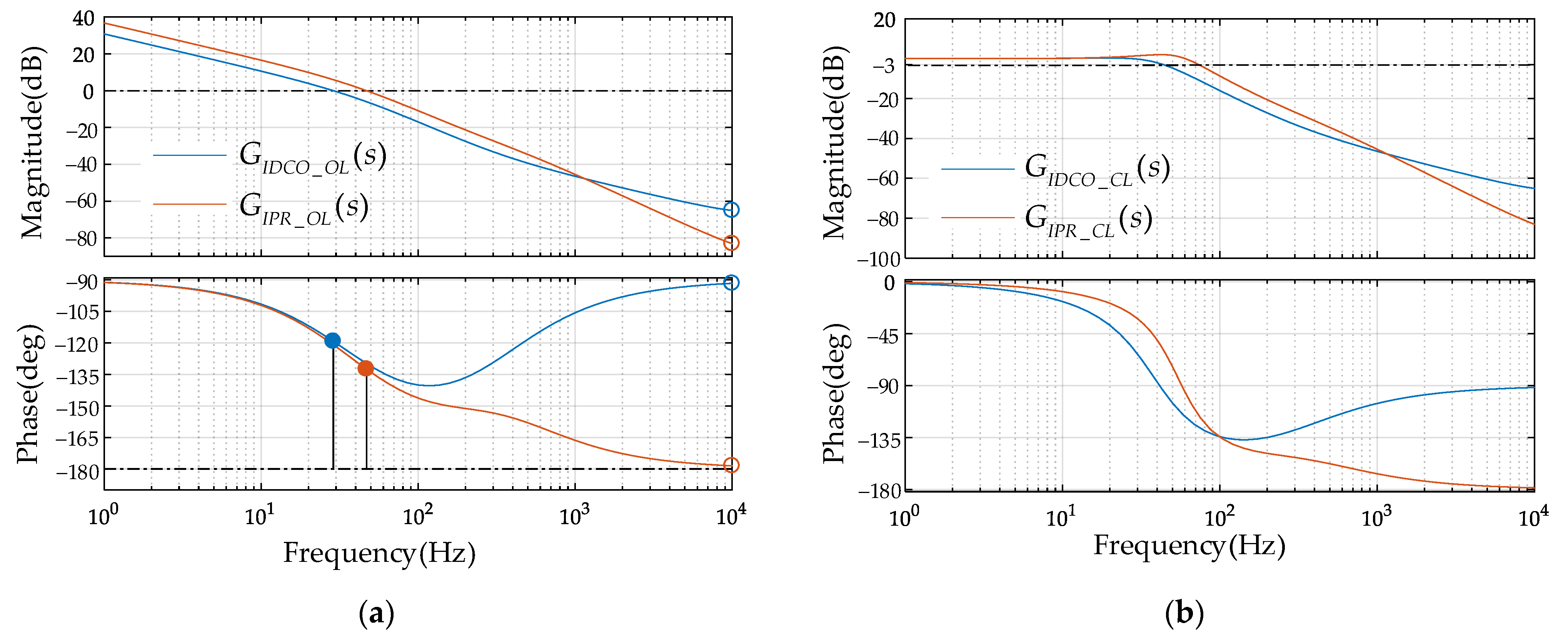
4.3. Comparison between the IDCO Method and IPR Method
4.3.1. Negative Resistance Characteristic of the Input Impedance for ISOP DCT
4.3.2. Dynamic Performance of the MVDC Distribution System
5. Simulation Results and Discussion
5.1. Verification of the Voltage Instability in the MVDC Distribution System
5.2. Verification of the Load Impedance Models
5.3. Verification of the IPR Method
6. Conclusions
- (i)
- Due to the decoupling condition of the control strategy for the ISOP DCT, the load impedance is hardly affected by the input voltage sharing controller optimization.
- (ii)
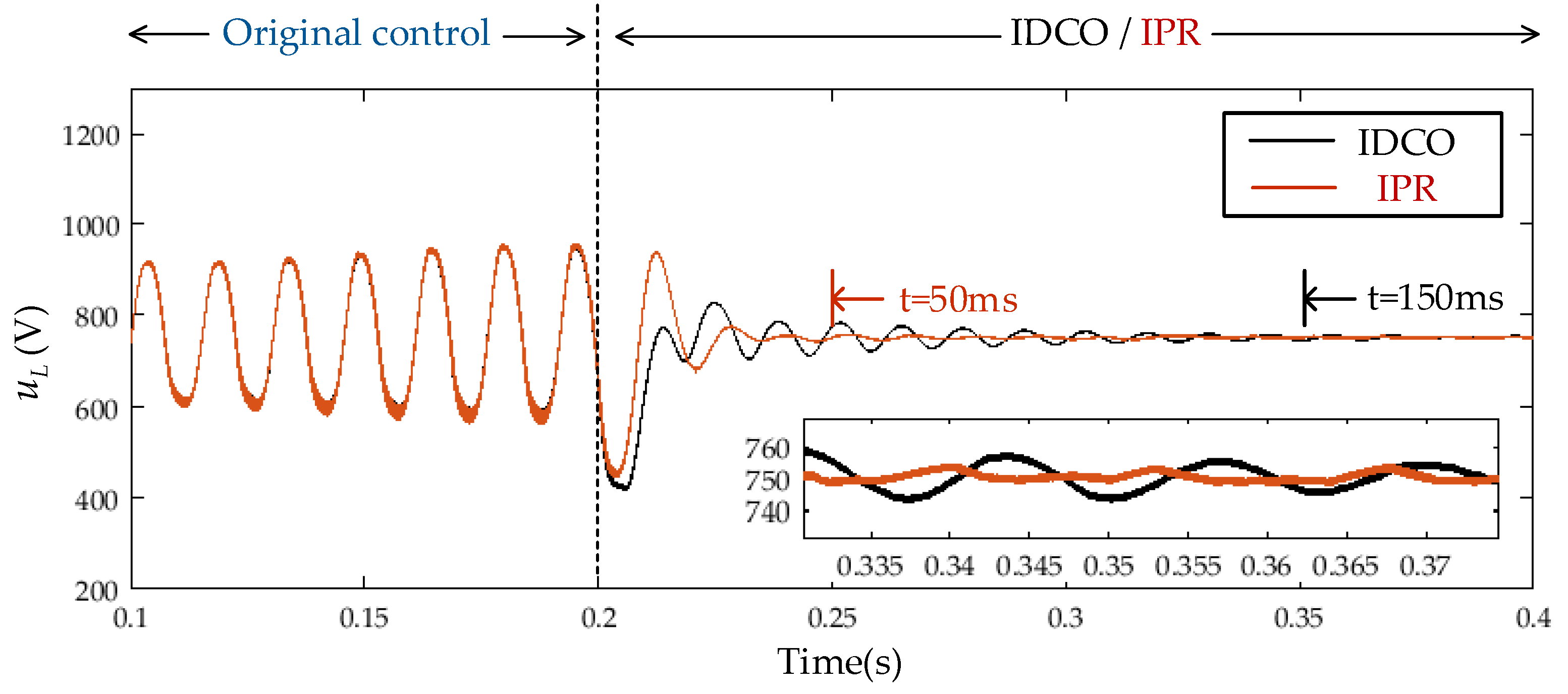
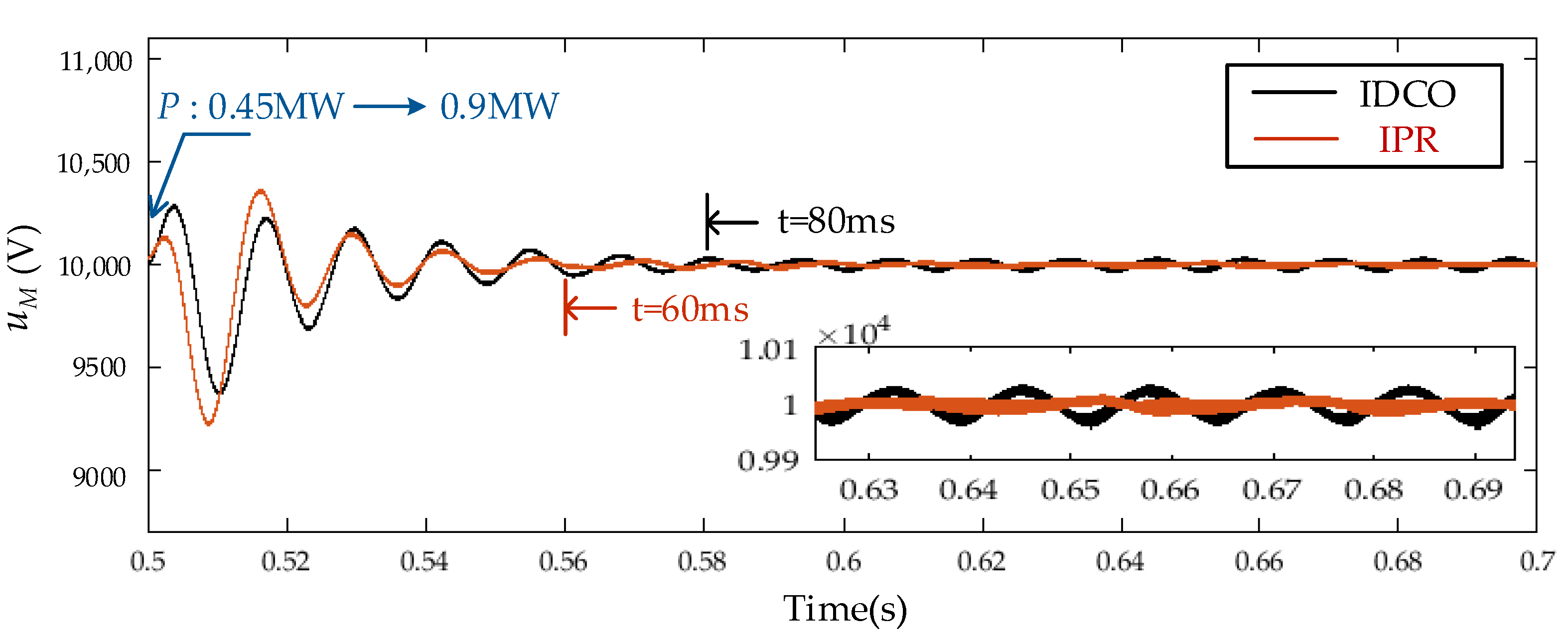
- Compared with the IDCO method, the proposed method further weakens the negative resistance characteristic of the ISOP DCT and suppresses the voltage oscillation rapidly. Moreover, regardless of load step-change or voltage reference step-change, the proposed method has a good dynamic performance and stability for the system. The overshoot of the proposed IPR method is larger than that of the traditional IDCO method, but it is still reasonable. This is a tradeoff for the rapid stabilization of the MVDC distribution systems.
- (iii)
- Compared with the method of modifying the impedance amplitude, the proposed IPR method considers the problem that the amplitude must intersect. The phase interval of the optimized stability criterion is adjustable. Furthermore, the impedance phase controller can be designed by the high order low-pass filter and bandpass filter, which are flexible and can be applied to the stability analysis for other systems.
Author Contributions
Funding
Conflicts of Interest
References
- Baran, M.E.; Mahajan, N.R. DC distribution for industrial systems: Opportunities and challenges. IEEE Trans. Ind. Appl. 2003, 39, 1596–1601. [Google Scholar] [CrossRef]
- Simiyu, P.; Xin, A.; Wang, K.; Adwek, G.; Salman, S. Multiterminal medium voltage DC distribution network hierarchical control. Electronics 2020, 9, 506. [Google Scholar] [CrossRef] [Green Version]
- Huang, A.Q.; Crow, M.L.; Heydt, G.T.; Zheng, J.P.; Dale, S.J. The future renewable electric energy delivery and management (FREEDM) system: The energy internet. Proc. IEEE 2011, 99, 133–148. [Google Scholar] [CrossRef]
- Mura, F.; De Doncker, R.W. Design aspects of a medium-voltage direct current (MVDC) grid for a university campus. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, Jeju, Korea, 30 May–3 June 2011. [Google Scholar]
- Steimel, A. Under europe’s incompatible catenary voltages a review of multi-system traction technology. In Proceedings of the 2012 Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 16–18 October 2012. [Google Scholar]
- Verdicchio, A.; Ladoux, P.; Caron, H.; Courtois, C. New medium-voltage DC railway electrification system. IEEE Trans. Transp. Electrif. 2018, 4, 591–604. [Google Scholar] [CrossRef]
- Zhu, R.; Liang, T.; Dinavahi, V.; Liang, G. Wideband modeling of power SiC mosfet module and conducted EMI prediction of MVDC railway electrification system. IEEE Trans. Electromagn. Compat. 2020, 62, 2621–2633. [Google Scholar] [CrossRef]
- Castellan, S.; Menis, R.; Tessarolo, A.; Sulligoi, G. Power electronics for all-electric ships with MVDC power distribution system: An overview. In Proceedings of the 2014 Ninth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 25–27 March 2014. [Google Scholar]
- Li, Z.; Liang, S.; Ren, L.; Tan, X.; Xu, Y.; Tang, Y.; Li, J.; Shi, J. Application of flux-coupling-type superconducting fault current limiter on shipboard MVDC integrated power system. IEEE Trans. Appl. Supercond. 2020, 30, 1–8. [Google Scholar] [CrossRef]
- Javaid, U.; Freijedo, F.D.; Dujic, D.; van der Merwe, W. MVDC supply technologies for marine electrical distribution systems. CPSS Trans. Power Electron. Appl. 2018, 3, 65–76. [Google Scholar] [CrossRef]
- Tu, H.; Feng, H.; Srdic, S.; Lukic, S. Extreme fast charging of electric vehicles: A technology overview. IEEE Trans. Transp. Electrif. 2019, 5, 861–878. [Google Scholar] [CrossRef]
- Mohammadpour, A.; Parsa, L.; Todorovic, M.H.; Lai, R.; Datta, R.; Garces, L. Series-input parallel-output modular-phase DC–DC converter with soft-switching and high-frequency isolation. IEEE Trans. Power Electron. 2016, 31, 111–119. [Google Scholar] [CrossRef]
- Zumel, P.; Ortega, L.; Lázaro, A.; Fernández, C.; Barrado, A.; Rodríguez, A.; Hernando, M.M. Modular dual-active bridge converter architecture. IEEE Trans. Ind. Appl. 2016, 52, 2444–2455. [Google Scholar] [CrossRef] [Green Version]
- Ruan, X.; Chen, W.; Cheng, L.; Tse, C.K.; Yan, H.; Zhang, T. Control strategy for input-series–output-parallel converters. IEEE Trans. Ind. Electron. 2009, 56, 1174–1185. [Google Scholar] [CrossRef]
- Grigore, V.; Hatonen, J.; Kyyra, J.; Suntio, T. Dynamics of a buck converter with a constant power load. In Proceedings of the PESC 98 Record. In Proceedings of the 29th Annual IEEE Power Electronics Specialists Conference (Cat. No.98CH36196), Fukuoka, Japan, 22–22 May 1998. [Google Scholar]
- Du, W.; Zhang, J.; Zhang, Y.; Qian, Z. Stability criterion for cascaded system with constant power load. IEEE Trans. Power Electron. 2013, 28, 1843–1851. [Google Scholar] [CrossRef]
- Su, M.; Liu, Z.; Sun, Y.; Han, H.; Hou, X. stability analysis and stabilization methods of dc microgrid with multiple parallel-connected DC–DC converters loaded by CPLs. IEEE Trans. Smart Grid 2018, 9, 132–142. [Google Scholar] [CrossRef]
- Emadi, A.; Khaligh, A.; Rivetta, C.H.; Williamson, G.A. Constant power loads and negative resistance instability in automotive systems: Definition, modeling, stability, and control of power electronic converters and motor drives. IEEE Trans. Veh. Technol. 2006, 55, 1112–1125. [Google Scholar] [CrossRef]
- Javaid, U.; Freijedo, F.D.; Dujic, D.; van der Merwe, W. Dynamic assessment of source–load interactions in marine MVDC distribution. IEEE Trans. Ind. Electron. 2017, 64, 4372–4381. [Google Scholar] [CrossRef]
- Liu, H.; Xie, X.; He, J.; Xu, T.; Yu, Z.; Wang, C.; Zhang, C. Subsynchronous interaction between direct-drive PMSG based wind farms and weak AC networks. IEEE Trans. Power Syst. 2017, 32, 4708–4720. [Google Scholar] [CrossRef]
- Li, C. Unstable operation of photovoltaic inverter from field experiences. IEEE Trans. Power Deliv. 2018, 33, 1013–1015. [Google Scholar] [CrossRef]
- Qin, H.; Kimball, J.W. Generalized average modeling of dual active bridge DC–DC converter. IEEE Trans. Power Electron. 2012, 27, 2078–2084. [Google Scholar]
- Singh, B.; Shankar, G.; Singh, A. Modelling of inverter interfaced dual active bridge converter. In Proceedings of the 2018 International Conference on Computing, Power and Communication Technologies (GUCON), Greater Noida, India, 28–29 September 2018. [Google Scholar]
- Mueller, J.A.; Kimball, J.W. Model-based determination of closed-loop input impedance for dual active bridge converters. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017. [Google Scholar]
- Ye, Q.; Mo, R.; Li, H. Stability analysis and improvement of a dual active bridge (DAB) converter enabled DC microgrid based on a reduced-order low frequency model. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016. [Google Scholar]
- Middlebrook, R.D.; Cuk, S. A general unified approach to modelling switching-converter power stages. In Proceedings of the 1976 IEEE Power Electronics Specialists Conference, Cleveland, OH, USA, 8–10 June 1976. [Google Scholar]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Riccobono, A.; Santi, E. Comprehensive review of stability criteria for DC power distribution systems. IEEE Trans. Ind. Appl. 2014, 50, 3525–3535. [Google Scholar] [CrossRef]
- Zhong, Q.; Zhang, X. Impedance-sum stability criterion for power electronic systems with two converters/sources. IEEE Access 2019, 7, 21254–21265. [Google Scholar] [CrossRef]
- Wang, X.; Qing, H.; Huang, P.; Zhang, C. Modeling and stability analysis of parallel inverters in island microgrid. Electronics 2020, 9, 463. [Google Scholar] [CrossRef] [Green Version]
- Riccobono, A.; Santi, E. A novel passivity-based stability criterion (PBSC) for switching converter DC distribution systems. In Proceedings of the 2012 Twenty-Seventh Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Orlando, FL, USA, 5–9 February 2012. [Google Scholar]
- Riccobono, A.; Santi, E. Stability analysis of an all-electric ship MVDC power distribution system using a novel passivity-based stability criterion. In Proceedings of the 2013 IEEE Electric Ship Technologies Symposium (ESTS), Arlington, VA, USA, 22–24 April 2013. [Google Scholar]
- Zhu, X.; Hu, H.; Tao, H.; He, Z. Stability analysis of PV plant-tied MVDC railway electrification system. IEEE Trans. Transp. Electrif. 2019, 5, 311–323. [Google Scholar] [CrossRef]
- Feng, F.; Wu, F.; Gooi, H.B. Impedance shaping of isolated two-stage AC-DC-DC converter for stability improvement. IEEE Access 2019, 7, 18601–18610. [Google Scholar] [CrossRef]
- Abdollahi, H.; Arrua, S.; Roinila, T.; Santi, E. A novel DC power distribution system stabilization method based on adaptive resonance-enhanced voltage controller. IEEE Trans. Ind. Electron. 2019, 66, 5653–5662. [Google Scholar] [CrossRef]
- Zhang, X.; Ruan, X.; Zhong, Q. Improving the stability of cascaded DC/DC converter systems via shaping the input impedance of the load converter with a parallel or series virtual impedance. IEEE Trans. Ind. Electron. 2015, 62, 7499–7512. [Google Scholar] [CrossRef]
- Feng, F.; Zhang, X.; Zhang, J.; Gooi, H.B. Stability enhancement via controller optimization and impedance shaping for dual active bridge-based energy storage systems. IEEE Trans. Ind. Electron. 2021, 68, 5863–5874. [Google Scholar] [CrossRef]
- Guan, Y.; Xie, Y.; Wang, Y.; Liang, Y.; Wang, X. An active damping strategy for input impedance of bidirectional dual active bridge DC–DC converter: Modeling, shaping, design, and Experiment. IEEE Trans. Ind. Electron. 2021, 68, 1263–1274. [Google Scholar] [CrossRef]
- Wang, Y.; Guan, Y.; Fosso, O.B.; Molinas, M.; Chen, S.; Zhang, Y. An input-voltage-sharing control strategy of input-series-output-parallel isolated bidirectional DC/DC converter for dc distribution network. IEEE Trans. Power Electron. 2022, 37, 1592–1604. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Value | |
|---|---|---|---|
| DC Grid | Lg | Transmission line inductance | 0.06 H |
| Vg | DC grid voltage | 10 kV | |
| ISOP DCT | MVDC bus voltage | 10 kV | |
| LVDC bus voltage | 750 V | ||
| K | Turns ratio of the high-frequency transformer | 3 | |
| n | Number of DAB modules | 3 | |
| The primary side voltage of the i-th DAB module | 3.33 kV | ||
| Ls | The leakage inductance of the high-frequency transformer and resonant inductance of every DAB module | 112.5 μH | |
| Switching frequency | 20 kHz | ||
| Cini | Input capacitance of the i-th DAB module | 225 μF | |
| Co | Output capacitance | 3 mF | |
| Pr | Rated power | 0.9 MW | |
| Input Voltage Sharing Controller | Kpi | Proportional coefficient | 0.7754 |
| Kii | Integral coefficient | 136.3038 | |
| Output Voltage Controller | Kp0 | Original proportional coefficient | 1.0449 |
| Ki0 | Original integral coefficient | 1520.6999 | |
| Kp | Optimized proportional coefficient | 0.1682 | |
| Ki | Optimized integral coefficient | 344.7928 | |
| Impedance Phase Reshaping Method | θ | Impedance phase interval | (0.90) |
| k | Gain of impedance phase controller | 0.45 | |
| f | Cut-off frequency of first-order low-pass filter | 450 Hz |
| Bandwidth | 44 Hz | 74 Hz |
| Phase Margin (PM) | 60° | 47° |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Liu, X.; Li, M.; Yu, F.; Yu, D. Input-Series-Output-Parallel DC Transformer Impedance Modeling and Phase Reshaping for Rapid Stabilization of MVDC Distribution Systems. Electronics 2021, 10, 3163. https://doi.org/10.3390/electronics10243163
Zhang Q, Liu X, Li M, Yu F, Yu D. Input-Series-Output-Parallel DC Transformer Impedance Modeling and Phase Reshaping for Rapid Stabilization of MVDC Distribution Systems. Electronics. 2021; 10(24):3163. https://doi.org/10.3390/electronics10243163
Chicago/Turabian StyleZhang, Qian, Ximei Liu, Meihang Li, Fei Yu, and Dachuan Yu. 2021. "Input-Series-Output-Parallel DC Transformer Impedance Modeling and Phase Reshaping for Rapid Stabilization of MVDC Distribution Systems" Electronics 10, no. 24: 3163. https://doi.org/10.3390/electronics10243163
APA StyleZhang, Q., Liu, X., Li, M., Yu, F., & Yu, D. (2021). Input-Series-Output-Parallel DC Transformer Impedance Modeling and Phase Reshaping for Rapid Stabilization of MVDC Distribution Systems. Electronics, 10(24), 3163. https://doi.org/10.3390/electronics10243163