3.3. System-Decoupling Scheme and Improvement of Short-Line (Inductance)-Decoupling Method
The decoupling of a long-distance transmission line is based on the characteristics of the line itself, so there is no numerical instability problem, and only the voltage and current signals at the opposite end need to be exchanged at both ends of the decoupling side, with small signal transmission. In addition, the influence of the time delay can be improved by combining the long-distance-transmission-line-decoupling method with SSN node splitting method [
23]. However, the number of long-distance transmission lines in the model limits the use of this method.
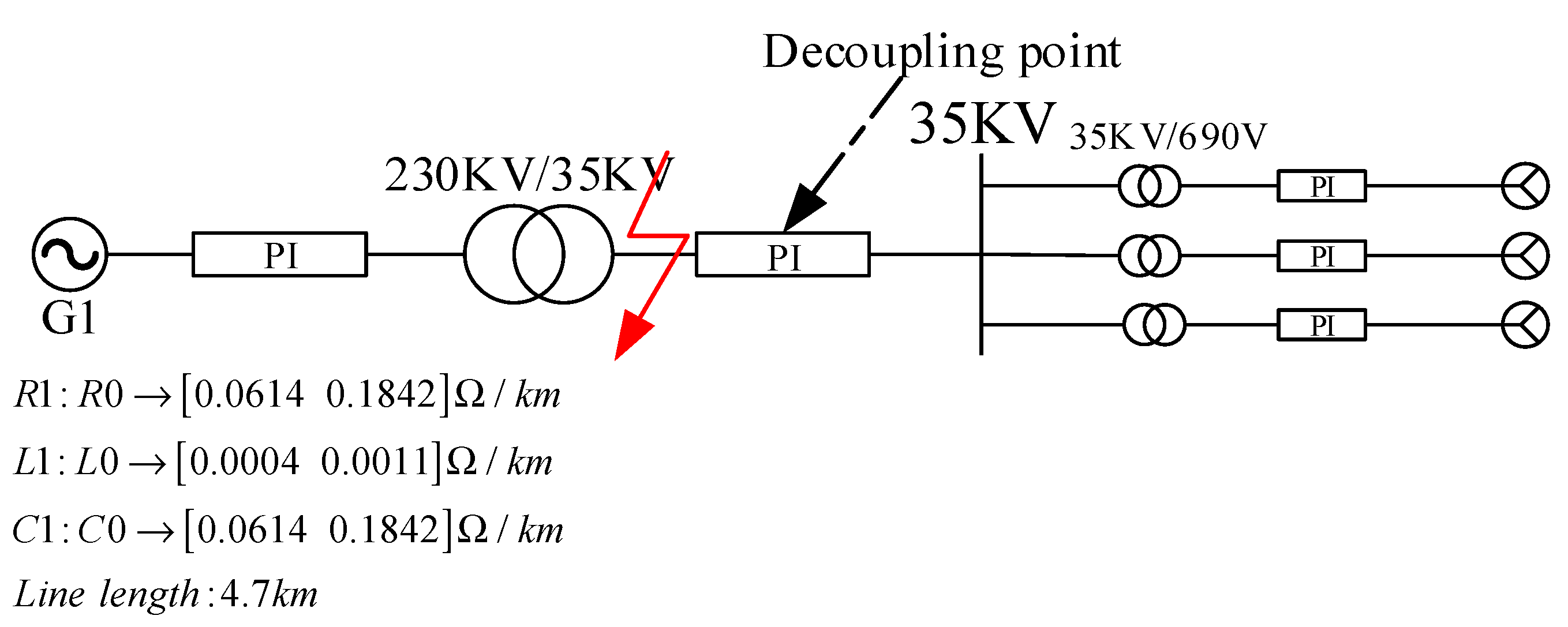
Short-line (inductance) decoupling is a relatively simple but widely applicable decoupling method. In practical application, the short line (the actual length is less than the transmission distance of a single step of the traveling wave) is usually replaced by a section of inductance. Due to the connection mode on the
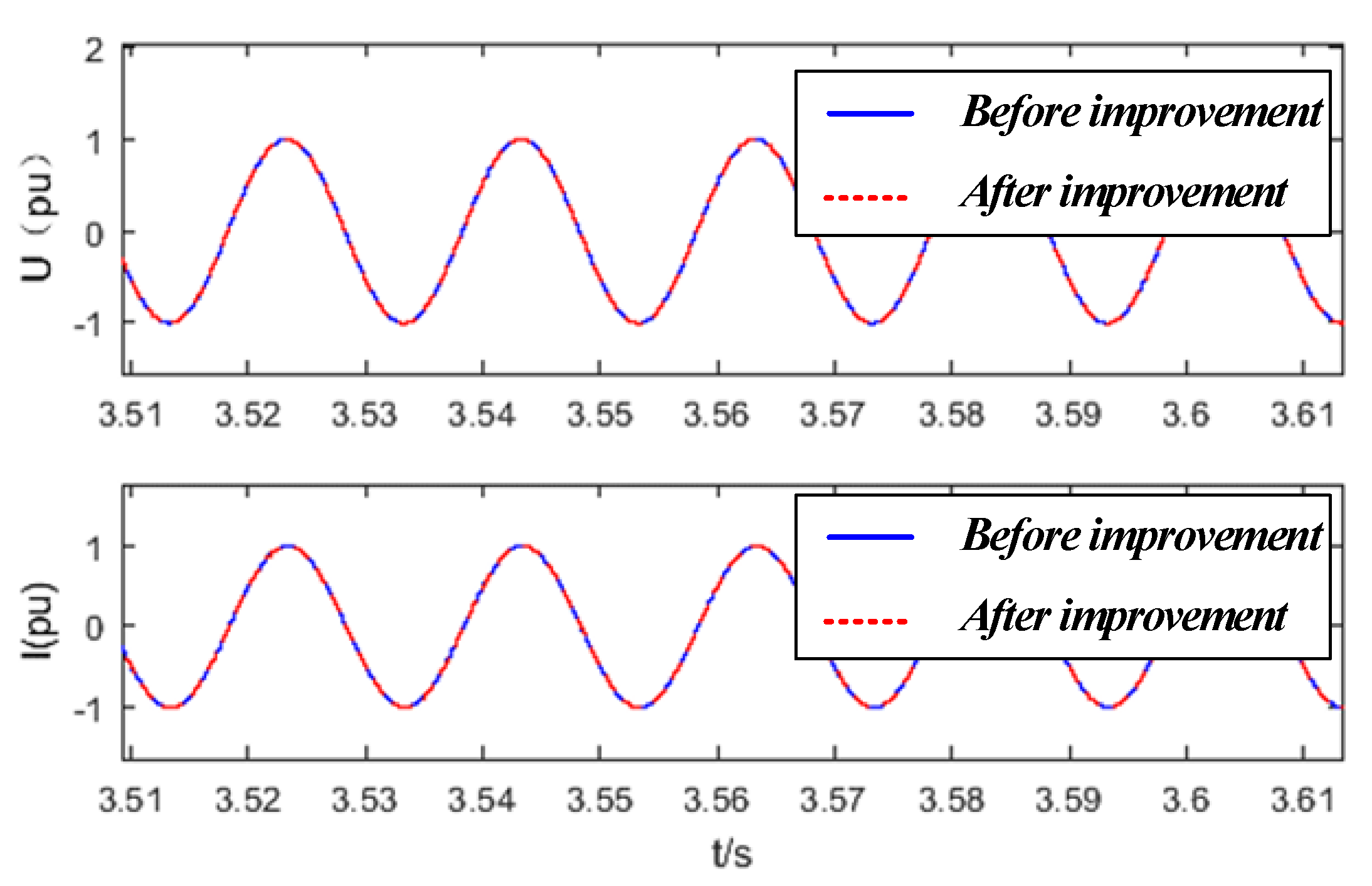
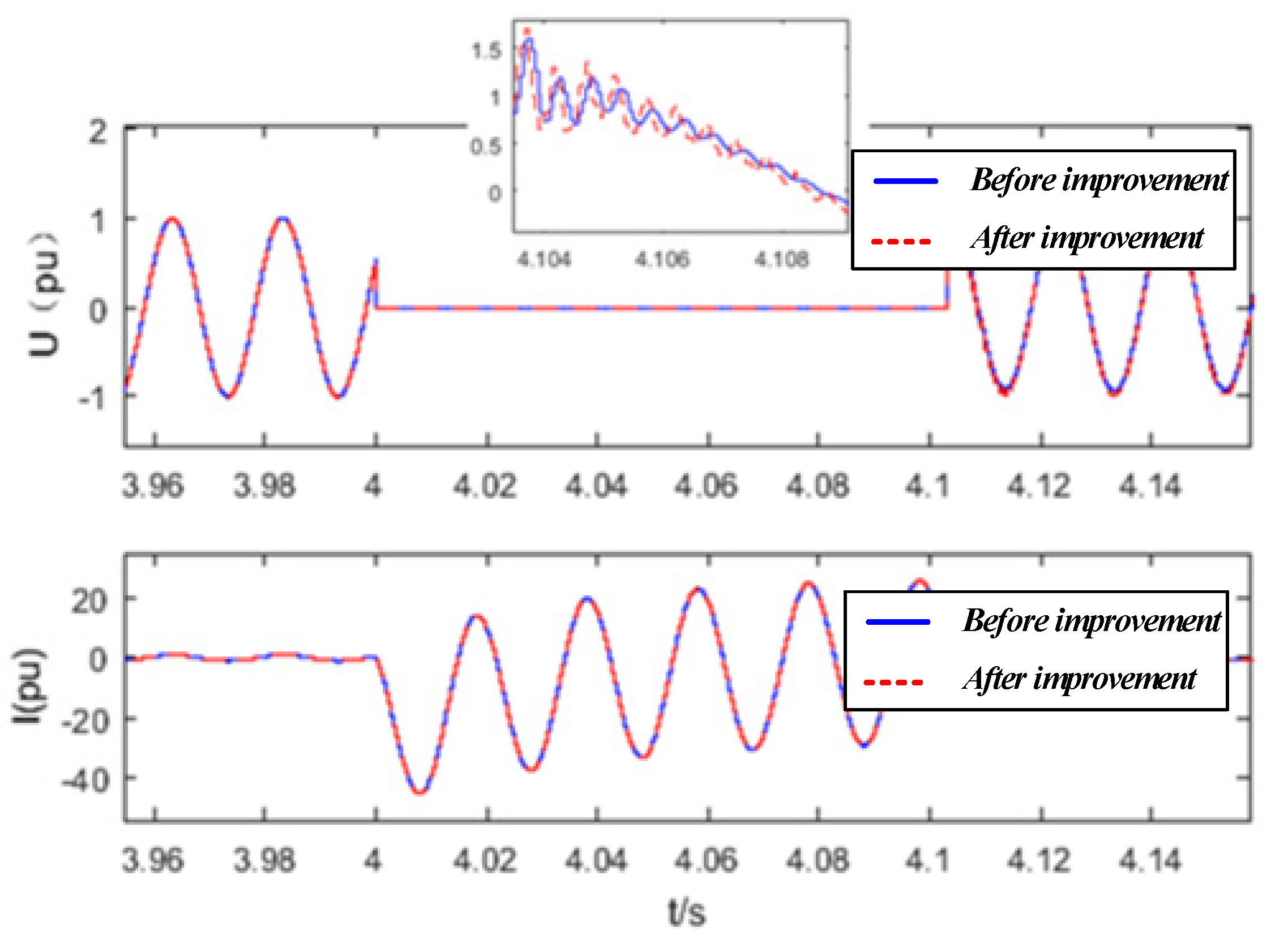
Y side of the transformer, it is also an option to extract the transformer inductance for decoupling. However, because this interface is modeled based on the trapezoidal-integration method, when the circuit breaker acts on the network, the trapezoidal-integration method will cause the abnormal oscillation (numerical oscillation) of the non-state variables. At present, the damping method is commonly used in engineering. In fact, mixing the trapezoidal-integration algorithm with the Euler method can also produce the same effect as the damping method [
24,
25].
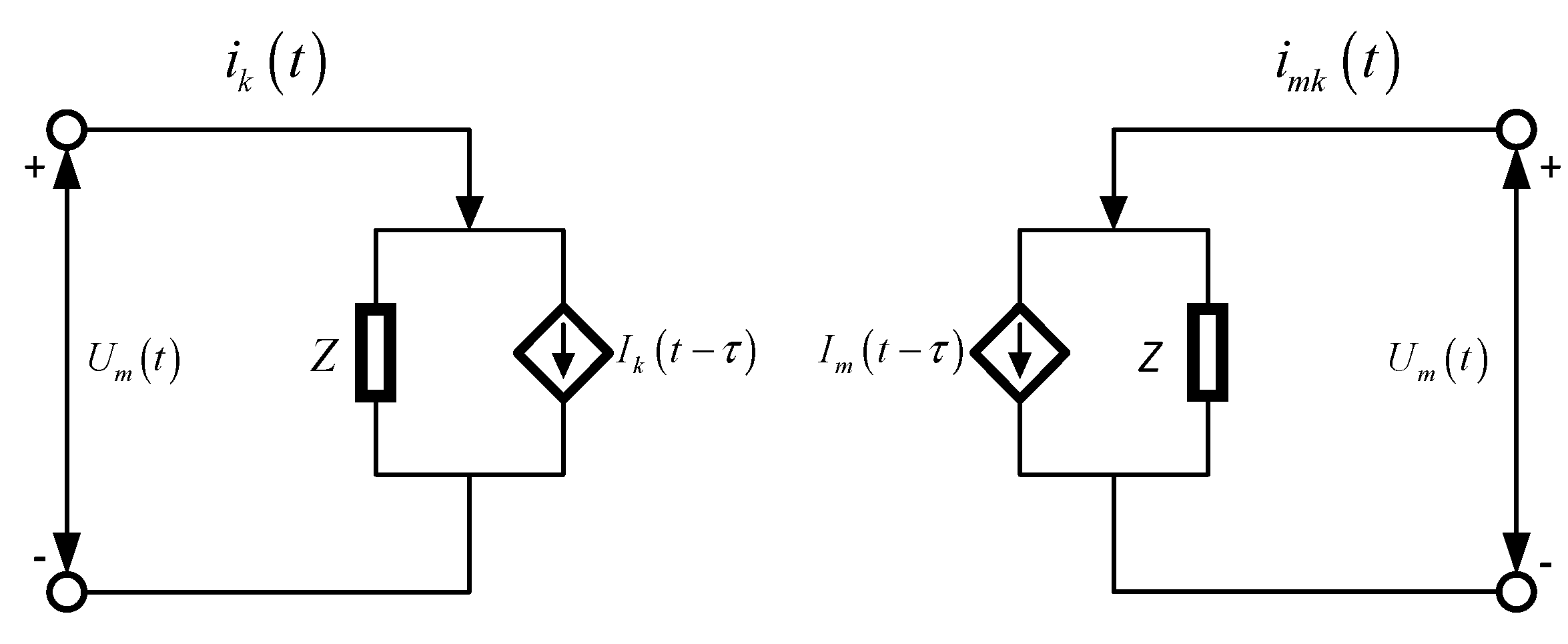
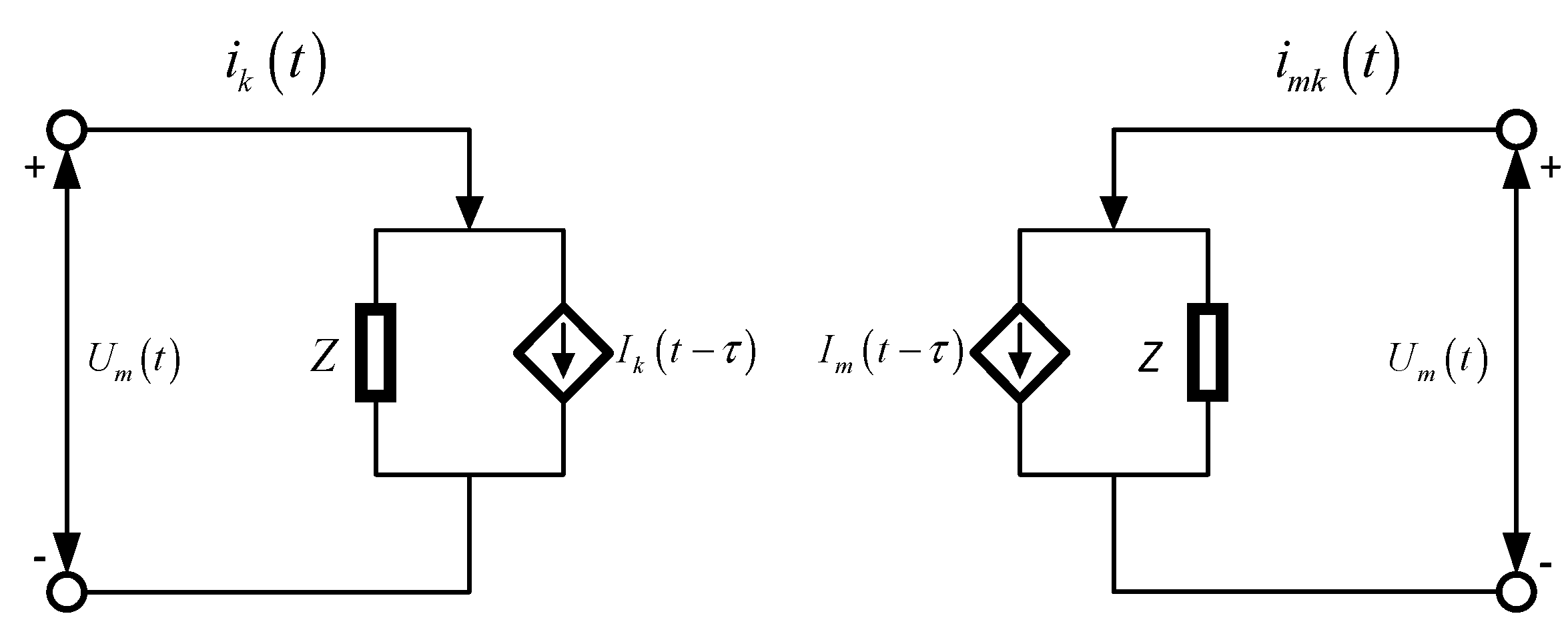
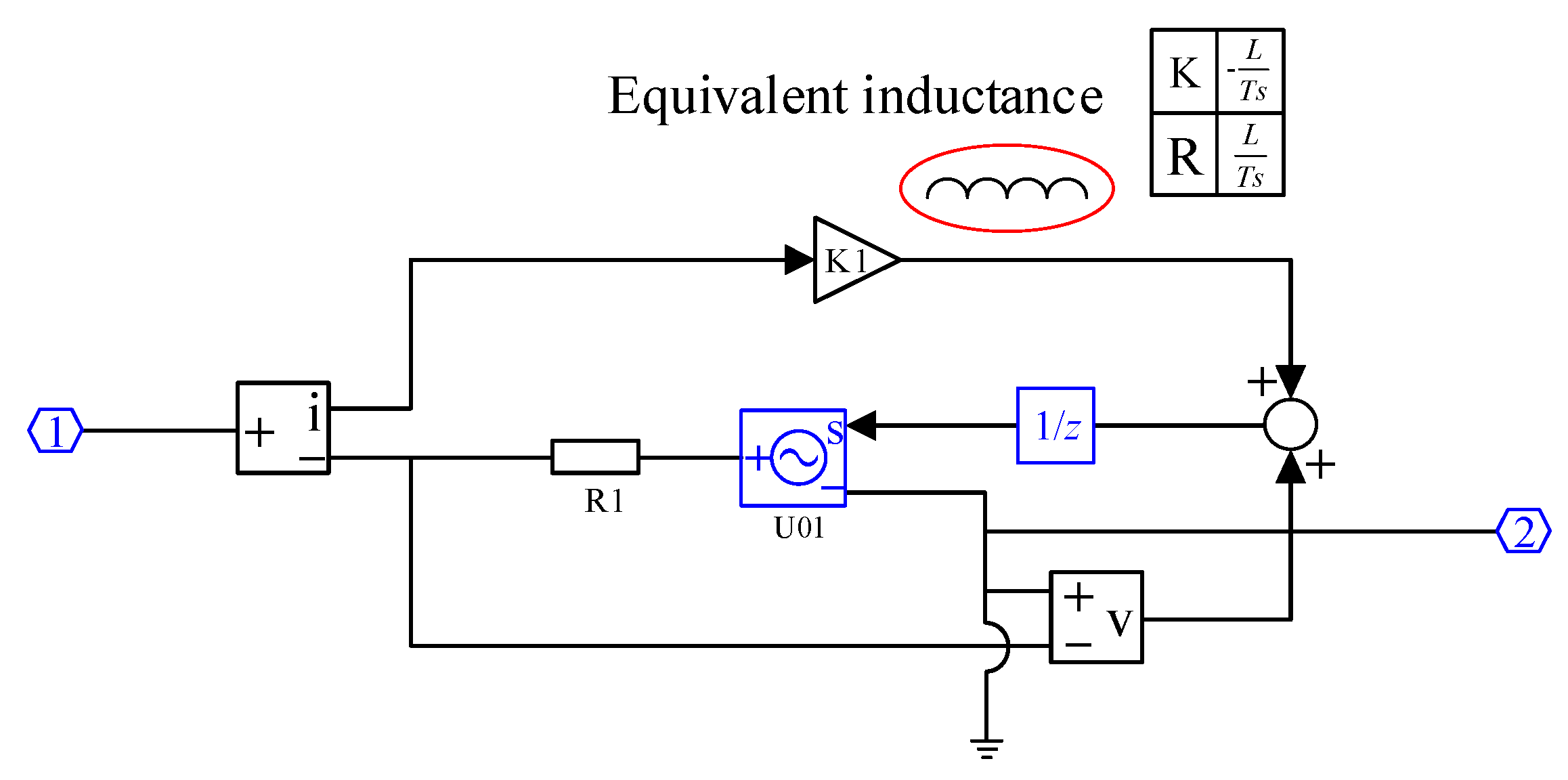
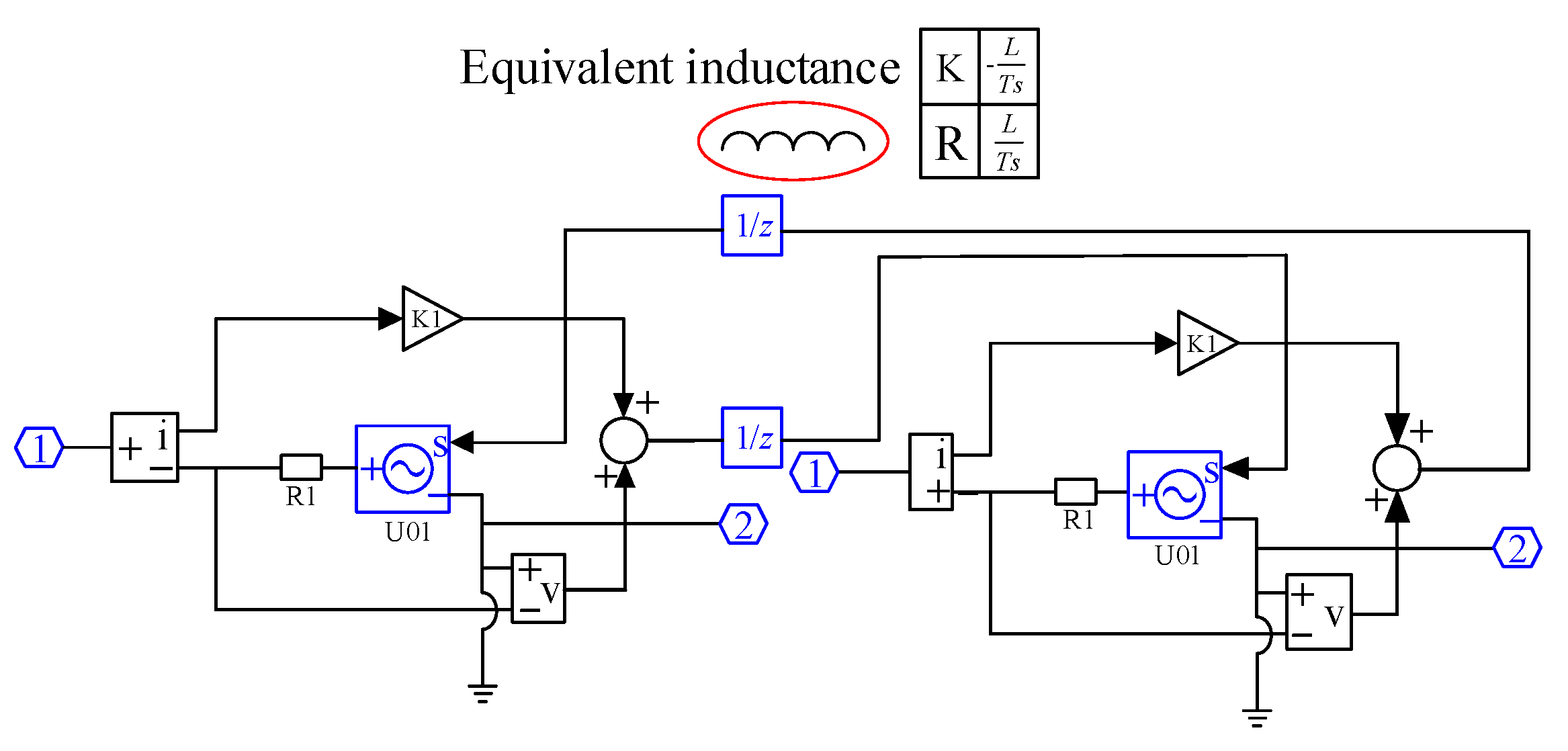
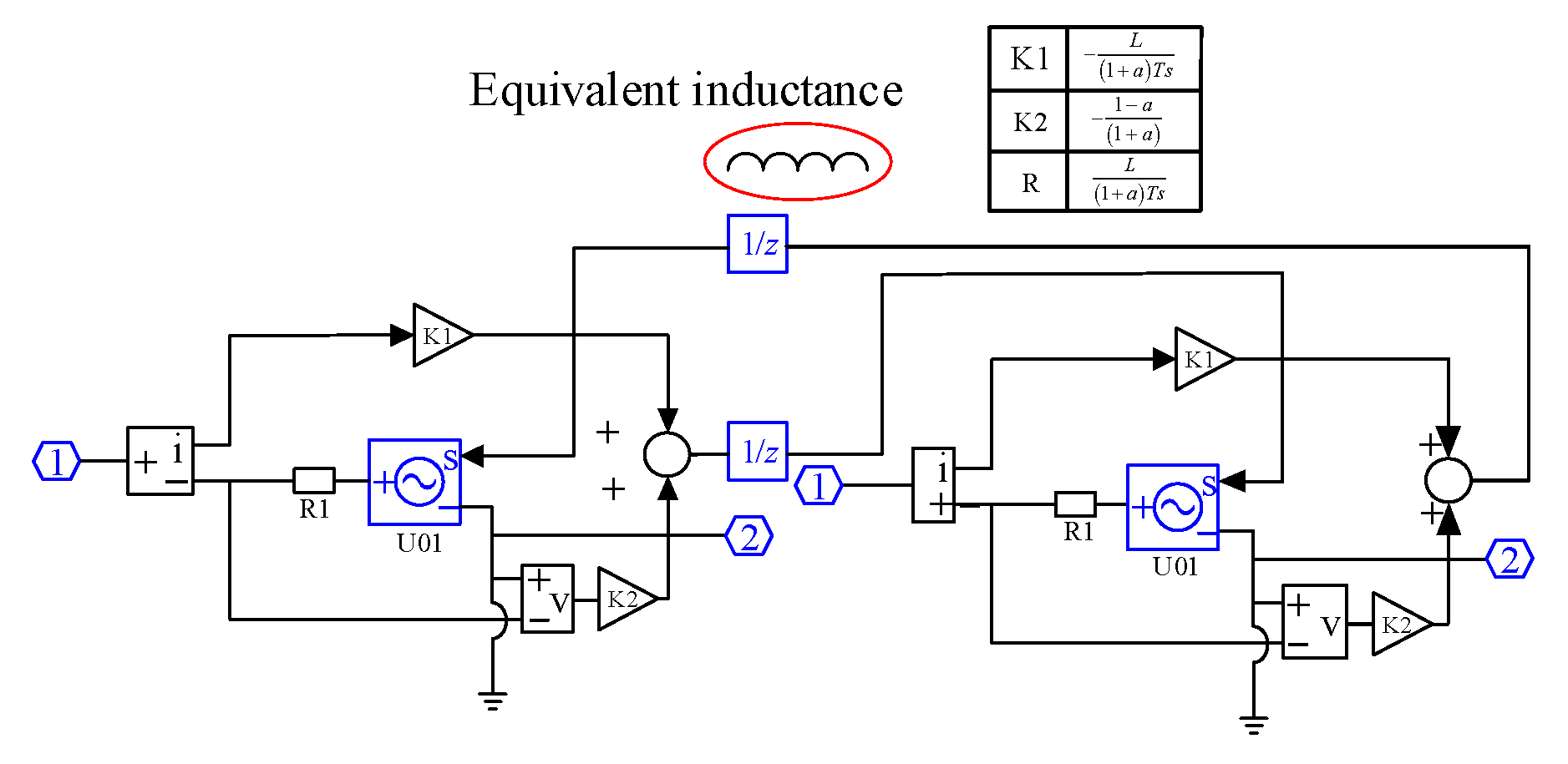
The discrete equation of inductance can be obtained by the backward Euler method
If the proportion of the backward Euler method is
a, and the proportion of trapezoidal-integration method is (1 −
a), the mixed algorithm is as follows in Formula (25):
Figure 6 shows the improved interface algorithm. In this way, it is equivalent to the parallel
a conductance of which the capacity is
of the inductance, which shows the equivalence between the mixing of the backward Euler method and trapezoidal-integration method and the damping method.
3.4. Co-Simulation Platform-Segmentation Method
According to the analysis of four interface algorithms in
Section 2, this paper uses the chosen criterion in this section as the rule of the proposed co-simulation platform.
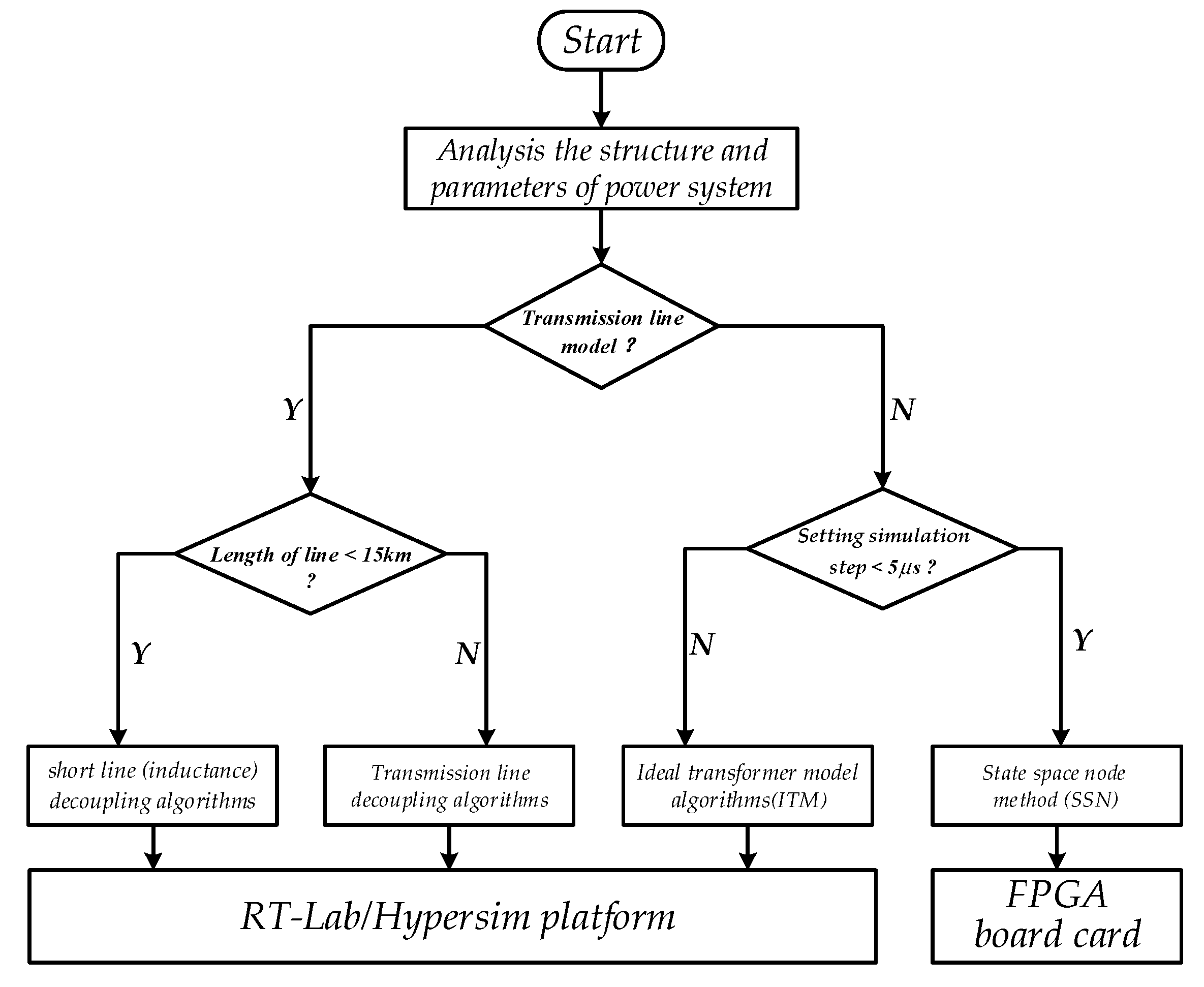
This paper divides the whole system into two parts: one for the transmission line and one for the substation.
In comparison with the principle of the short-line decoupling algorithm, the minimum decoupling distributed-parameter-line length of the transmission-line-interface algorithm is 15 km [
14,
26]. Hence, this paper sets 15 km as the chosen criterion by which to divide the two types of line-interface algorithms. If the line length is less than 15km, then the interface algorithm chooses the short-line interface algorithm; if not, then the transmission-line algorithm will be chosen in the line-decoupling part.
The ideal-transformer-model method is widely used in engineering. It has the advantages of a simple structure, high operation accuracy and convenient improvement, but it has weak numerical stability. With the improvement of the system complexity, the operation scale becomes more and more complex. With regard to parallel operation, because the coupling signal needs to introduce an additional step delay, the introduction of the delay will not only lead to phase error but also amplitude error of the AC system, which must be improved by the compensation algorithm. At present, the widely used methods include interpolation prediction, the dq-transformation method and the impedance-matching method. The first two compensation methods are widely used in MMC model segmentation [
16,
27], but when there are sudden variables in the joint solution signal, the performance of the transient characteristics is not ideal. The impedance-matching method can better solve the problem of numerical instability, but with the increase in system complexity, the implementation of impedance matching will be more difficult. One study quickly decoupled the bridge-arm voltage and sub mode through the substitution theorem, so that the joint solution signal changed from a sudden variable to a continuous variable [
28,
29]. On this basis, interpolation prediction is used to better improve the transient characteristics.
When using the state-space-node (SSN) method for model-segmentation calculation, its main advantages are that there is no numerical instability problem, but there is good network flexibility and network segmentation can be carried out at any node. However, when using the SSN algorithm for model-segmentation calculation, each simulation step needs not only to transmit voltage and current signals, but also to calculate the Thevenin equivalent impedance of the segmented subsystem in real time and carry out real-time matching. This interface algorithm has a large amount of communication. Therefore, the SSN algorithm is very effective where there are many electronic switching devices, but overuse will lead to the communication time being greater than the time saved by model segmentation, so the SSN algorithm should be used appropriately.
Hence, when choosing an interface algorithm in the substation part, according to the principle of increasing simulation efficiency, this paper set the simulation step time as the chosen criterion between the ideal-transformer-model algorithm and the SSN algorithm. The value of the simulation step time is because the minimum simulation of RT-lab is , and simulation step time of will introduce some errors to the platform.
In summary, the flowchart of the proposed co-simulation platform is shown in
Figure 7.
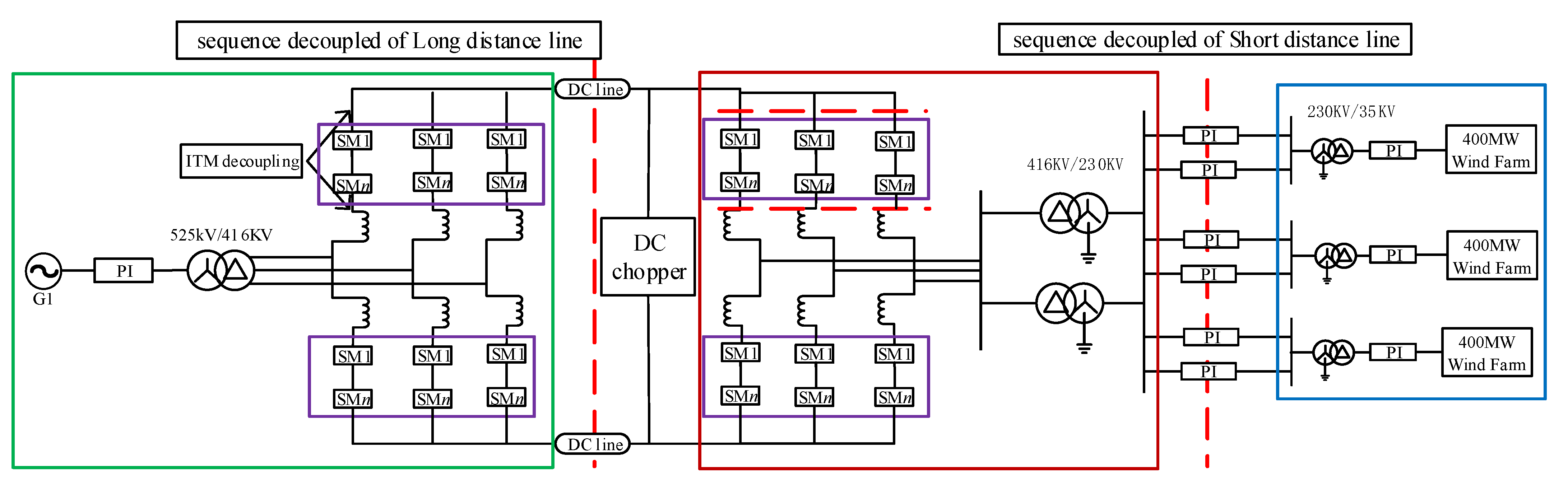
The fan is decoupled at different points through the flexible direct-delivery dual-platform-simulation model as an example. The decoupling method is shown in
Figure 8. The large-scale system is decoupled at the short line between the offshore booster station and the booster station at the wind farm gathering point. The green form line is the Hypersim platform and the blue and red forms are the RT-lab co-simulation platforms. Both of the converter stations are decoupled at the DC line through long-line decoupling. The sub-module of the MMC bridge arm in the purple form is decoupled from the valve side through the ideal-transformer-model method. Here, the joint solution quantities are the bridge-arm current and the bridge-arm voltage. Since neither of them is a sudden-change quantity, interpolation prediction can better compensate for the delay. The AC/DC system is calculated in the CPU and the sub-module is calculated in the FPGA [
6,
29,
30,
31]. Due to the large number of power electronic devices of fans in the wind farm, the order is reduced through SSN decoupling in order to reduce the number of switches in the unit system and accelerate the operation.
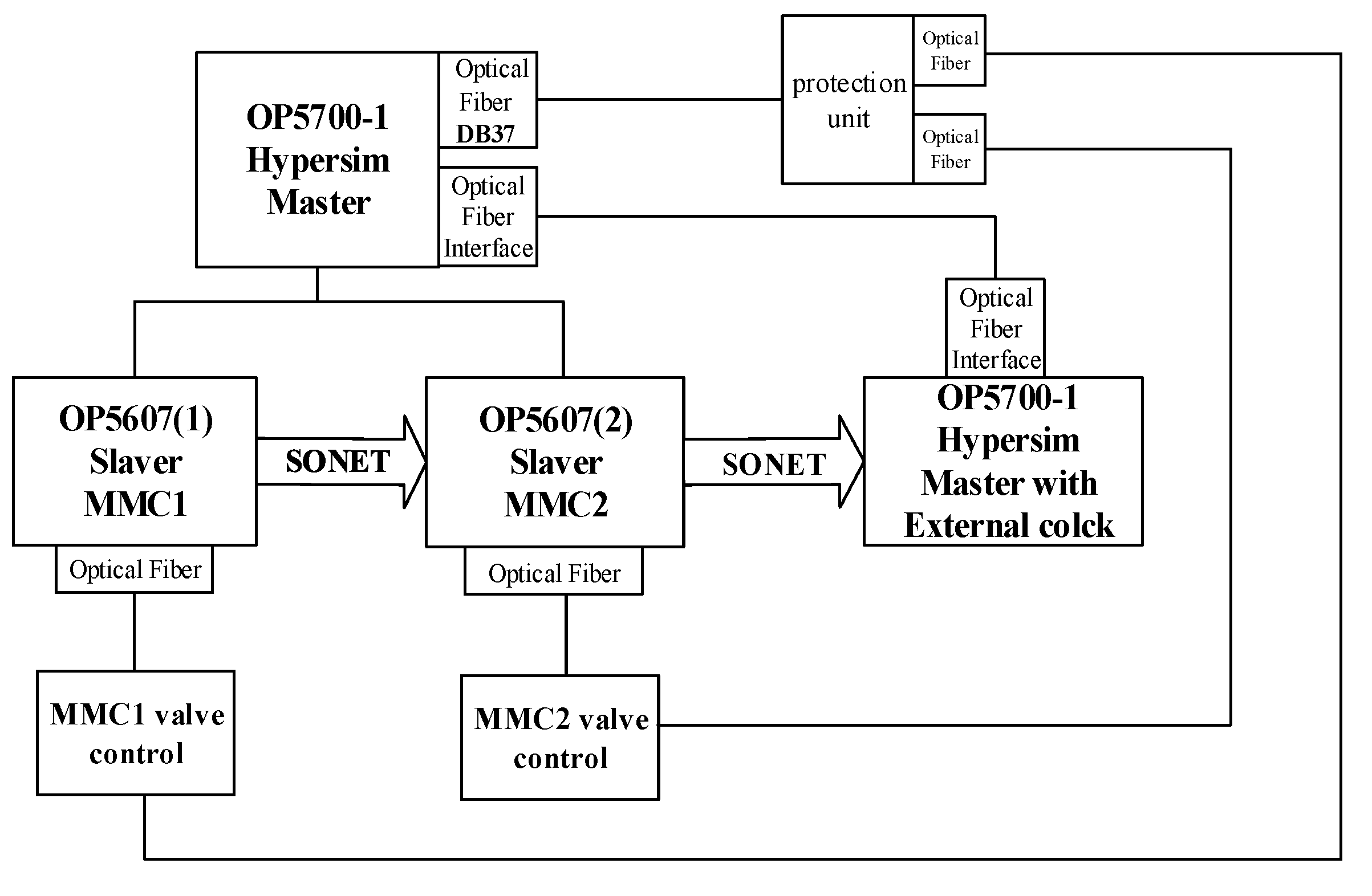
An unnecessary delay in co-simulation will mainly affect two aspects. On the one hand, an unnecessary delay will affect the stability of interface; on the other hand, a data delay will lead to an adverse impact on the control and protection [
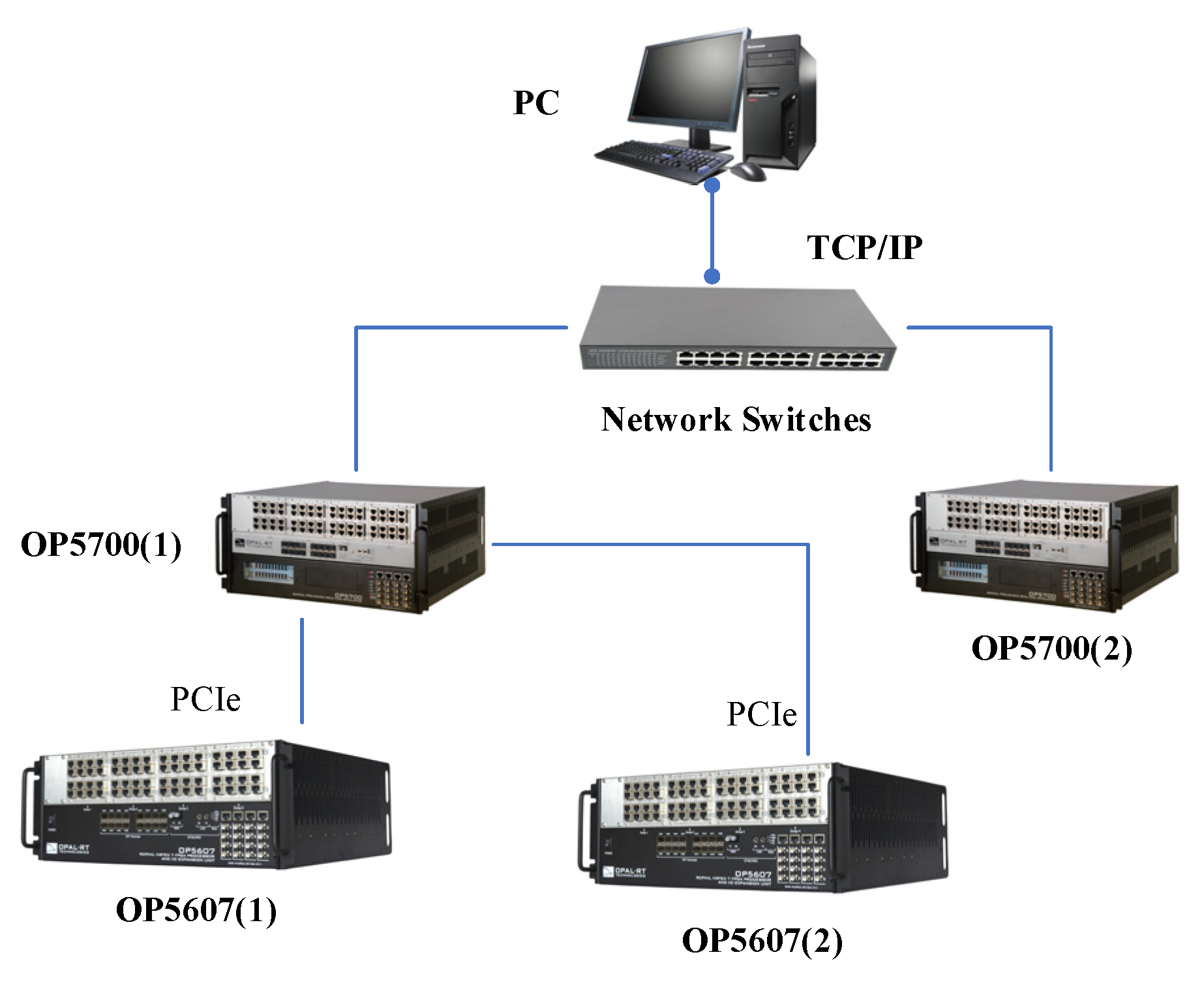
30] Therefore, clock synchronization and data interaction play important roles in the co-simulation platform. In order to solve the delay problem, an optical fiber using Aurora communication protocol, which is a scalable lightweight link-layer protocol for moving data between point-to-point serials, is adopted between OP5607 and OP5700 in the co-simulation platform. [
31] The signal-transmission time is equal to a communication step which uses an FPGA cycle (50 μs). The simulation-connection-diagram flowchart is shown in
Figure 9.
The proposed co-simulation model of a flexible DC-transmission system based on Hypersim mainly adopts three interface technologies: standard PCIe interface technology, high-speed optical-fiber-communication technology based on Aurora protocol, and low-speed optical-fiber-communication technology based on 60044-8 protocol. Among the rest, standard PCIe interface technology is used for the Hypersim inner protocol. According to the principle of Hypersim, the optical-fiber signal of the OP5607 adopts the Aurora 8B10B protocol, and the communication cycle is 50 μs (Hypersim calculation step). Hence, the FPGA cycle chooses 50 μs as a communication step in order to adapt to the Hypersim, and the signal-transmission time is equal to a communication step which also uses an FPGA cycle (50 μs). The optical fiber uses communication synchronization between platforms and each platform is defined as master and slave. The slave side obtains the system clock from the master side to keep the signal synchronized. The DB37 and optical-fiber communications are used between the FPGA and the pole-control modular, and the optical-fiber communication is used between the FPGA and the valve control. All of the communication cycles are set to one step (50 μs).





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}