
An Active Voltage Coordinate Control Strategy of DFIG-Based Wind Farm with Hybrid Energy Storage System




Abstract
:1. Introduction
- (1)
- A novel active voltage coordinate control strategy is proposed, which consists of the active and reactive power coordinate control strategy and the HESS-based auxiliary control strategy. The proposed control strategy enables the wind farm to spontaneously participate in the voltage regulation of the power grid. The more complete reactive power support auxiliary services of the wind farm could be provided based on the proposed strategy.
- (2)
- An active and reactive power coordinate control strategy of the wind farm is proposed. This strategy can satisfy the different operation states of the DFIG based on the active ω-β coordinate control and the active β control. Moreover, the LRP of the wind farm can be effectively improved to satisfy the reactive power demand of the connected system in the wind speed variations.
- (3)
- An auxiliary control strategy in DFIG based on the hybrid energy storage system (HESS) is proposed. The energy management in DFIG can be realized based on the proposed strategy. The reasonable utilization of the HESS reduces the power flow fluctuation of the local connected power grid and maintains the wind energy utilization. The proposed control strategy can respond to high frequency and low frequency commands to realize power compensation.
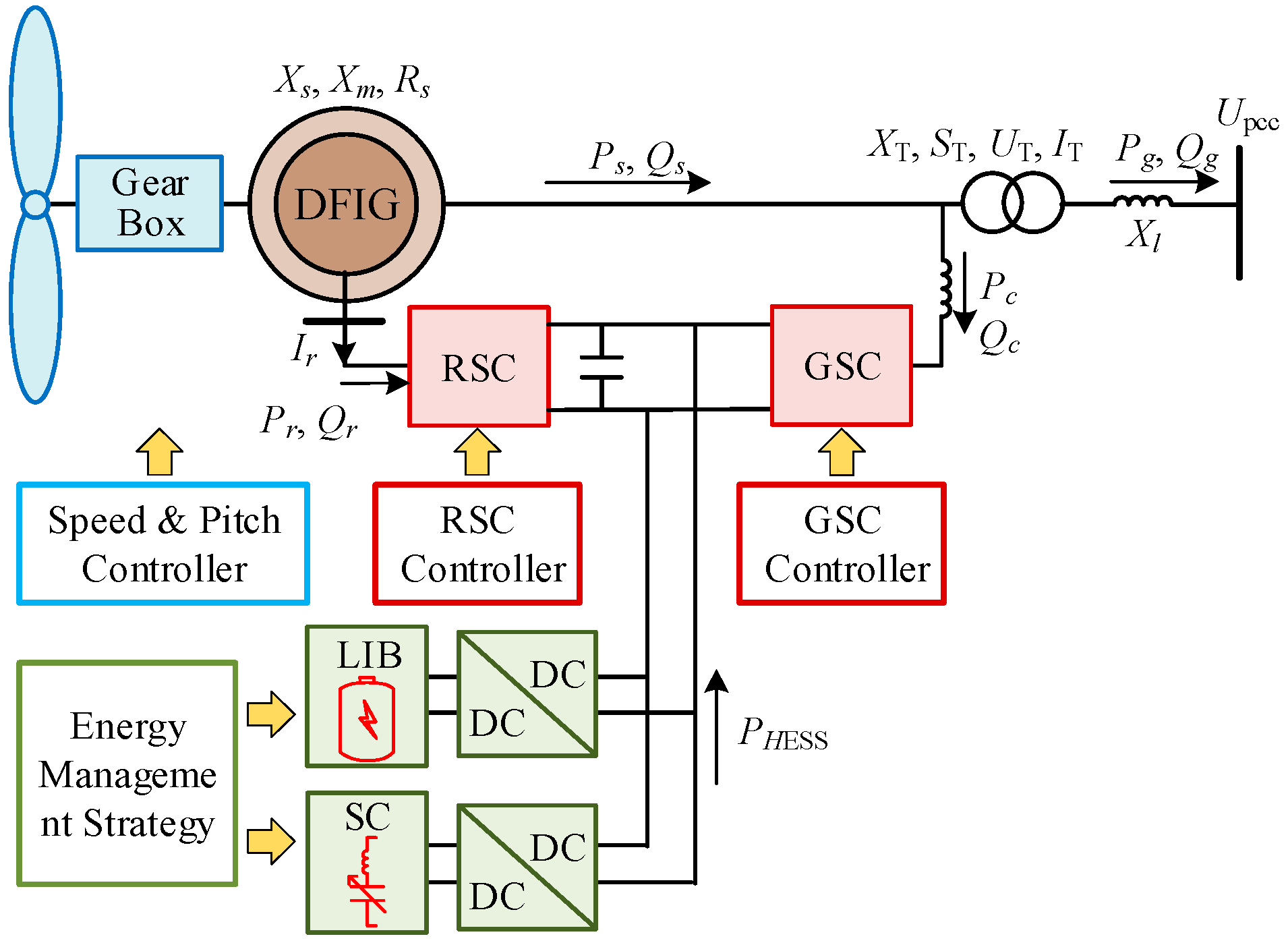
2. Operation Characteristics of DFIG-Based Wind Farm
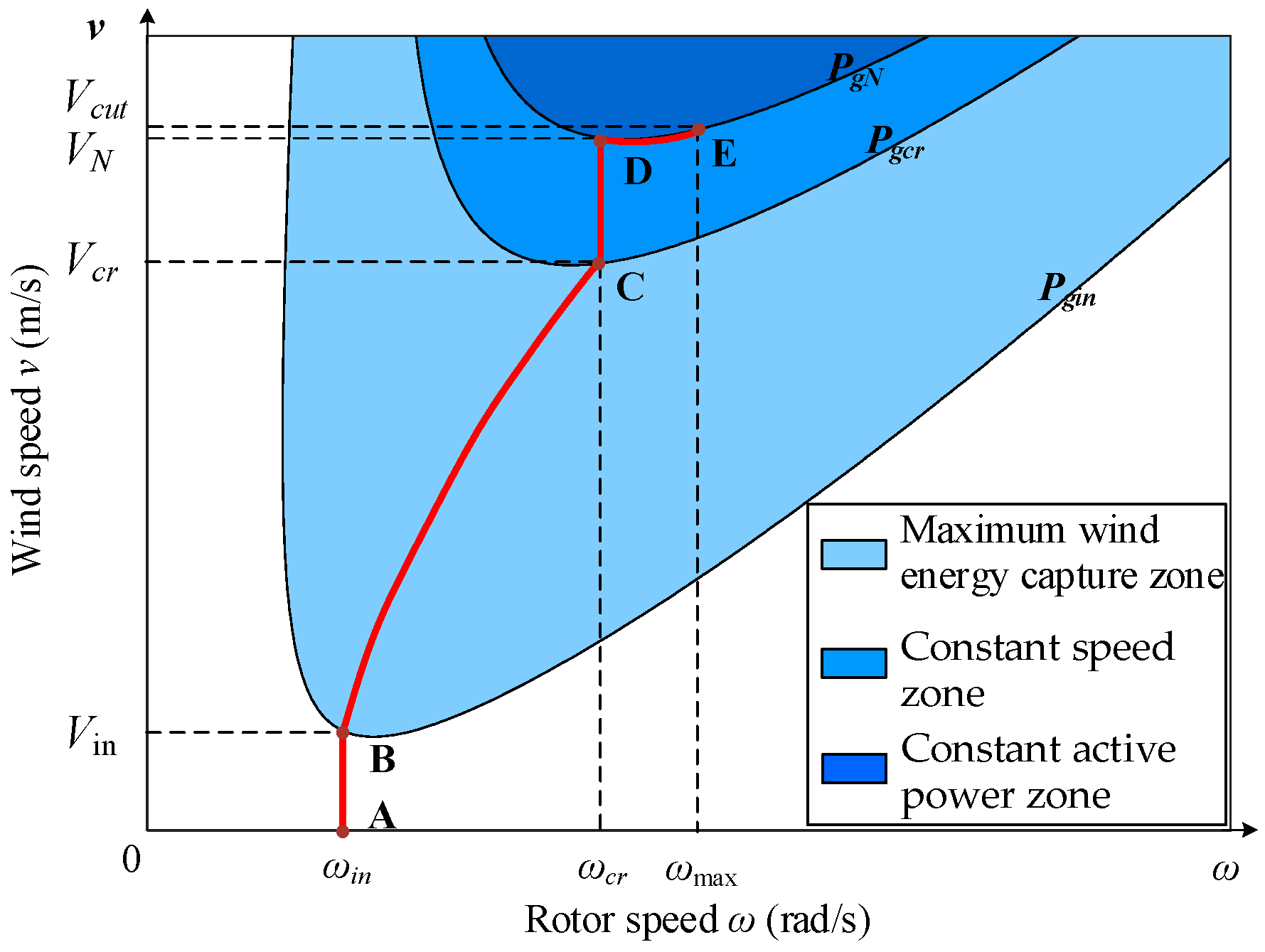
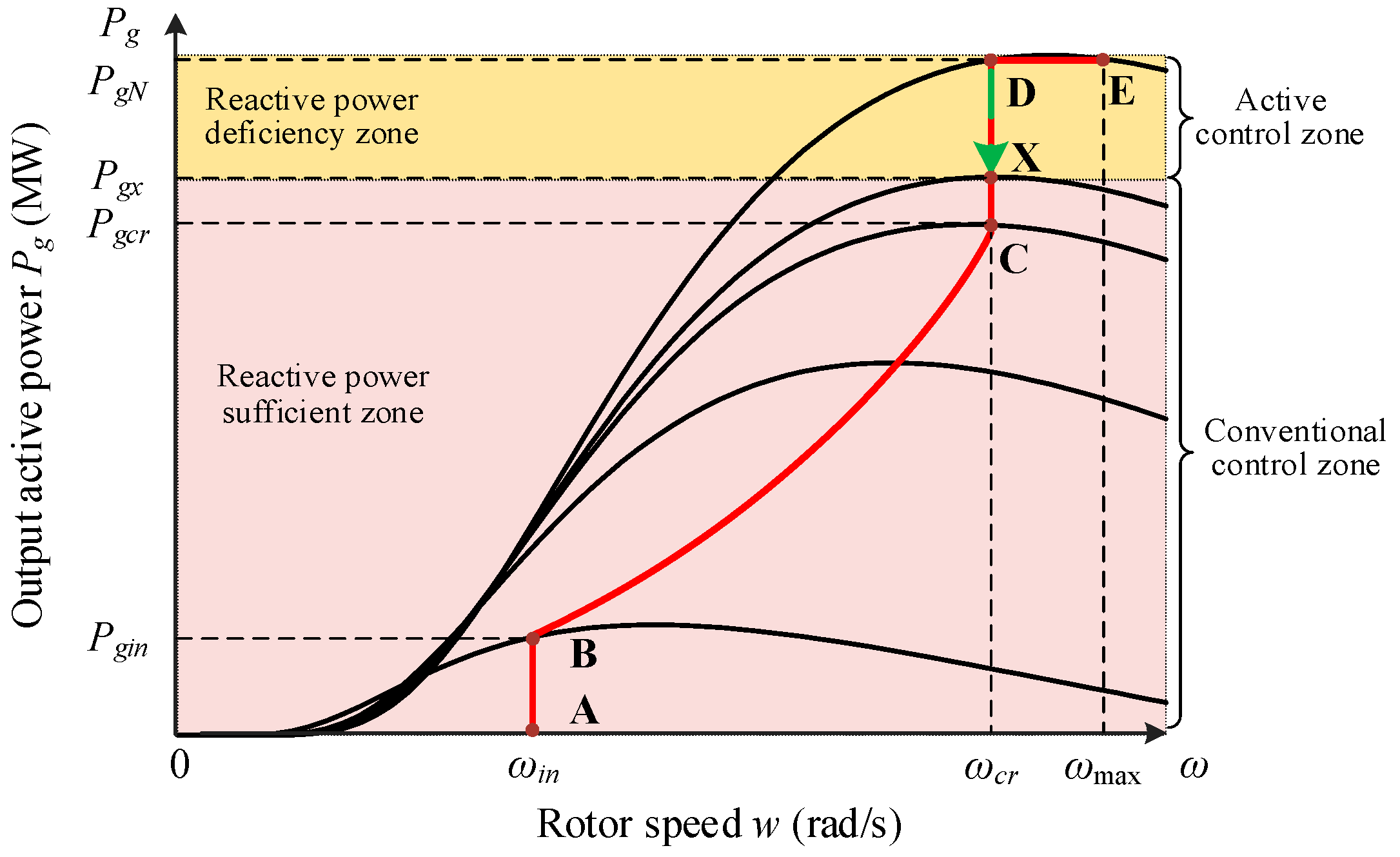
2.1. Power Characteristics of DFIG-Based Wind Turbine
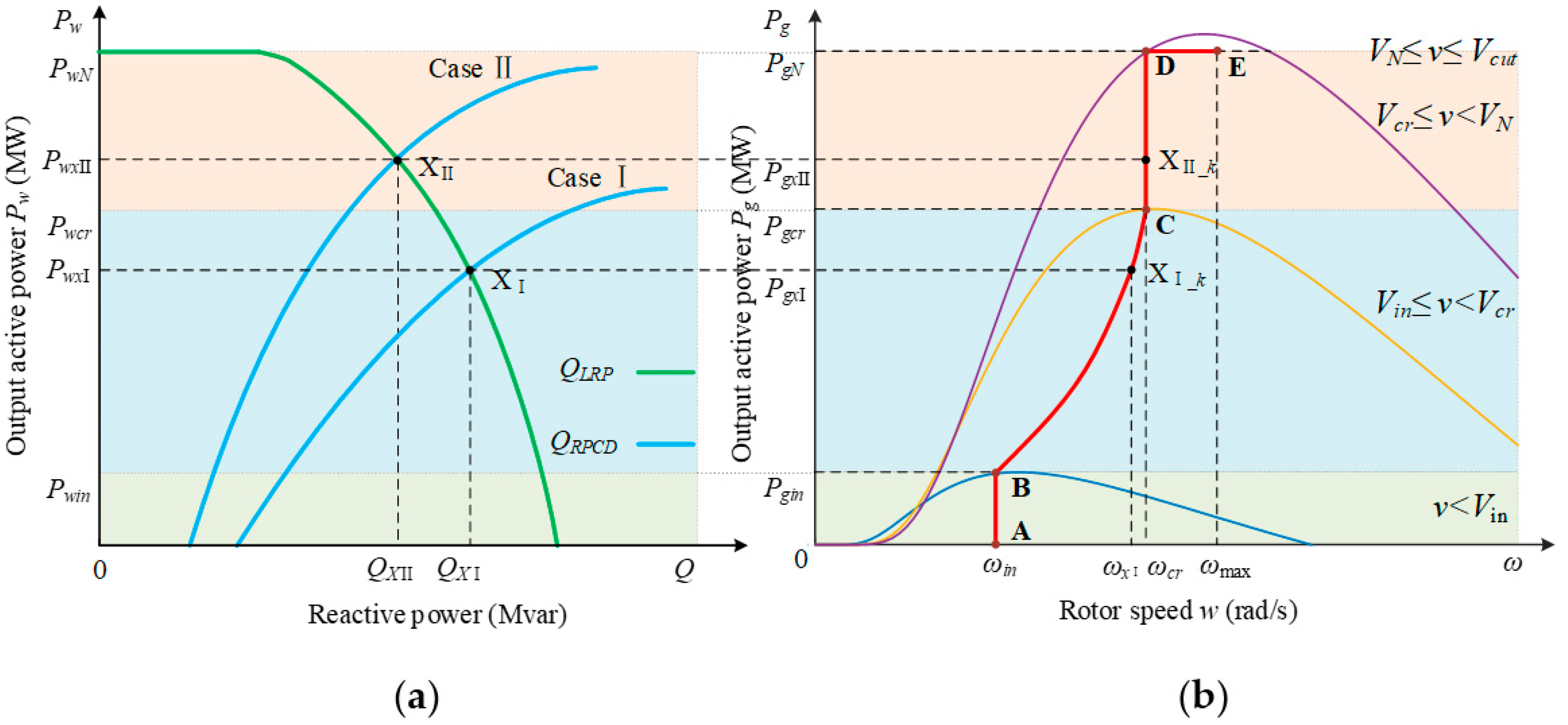
2.2. LRP of a DFIG-Based Wind Farm
2.3. RPCD of the Connected Power Grid
3. Structure of the Proposed Active Voltage Coordinate Control Strategy
4. Active Voltage Coordinate Control Strategy with HESS
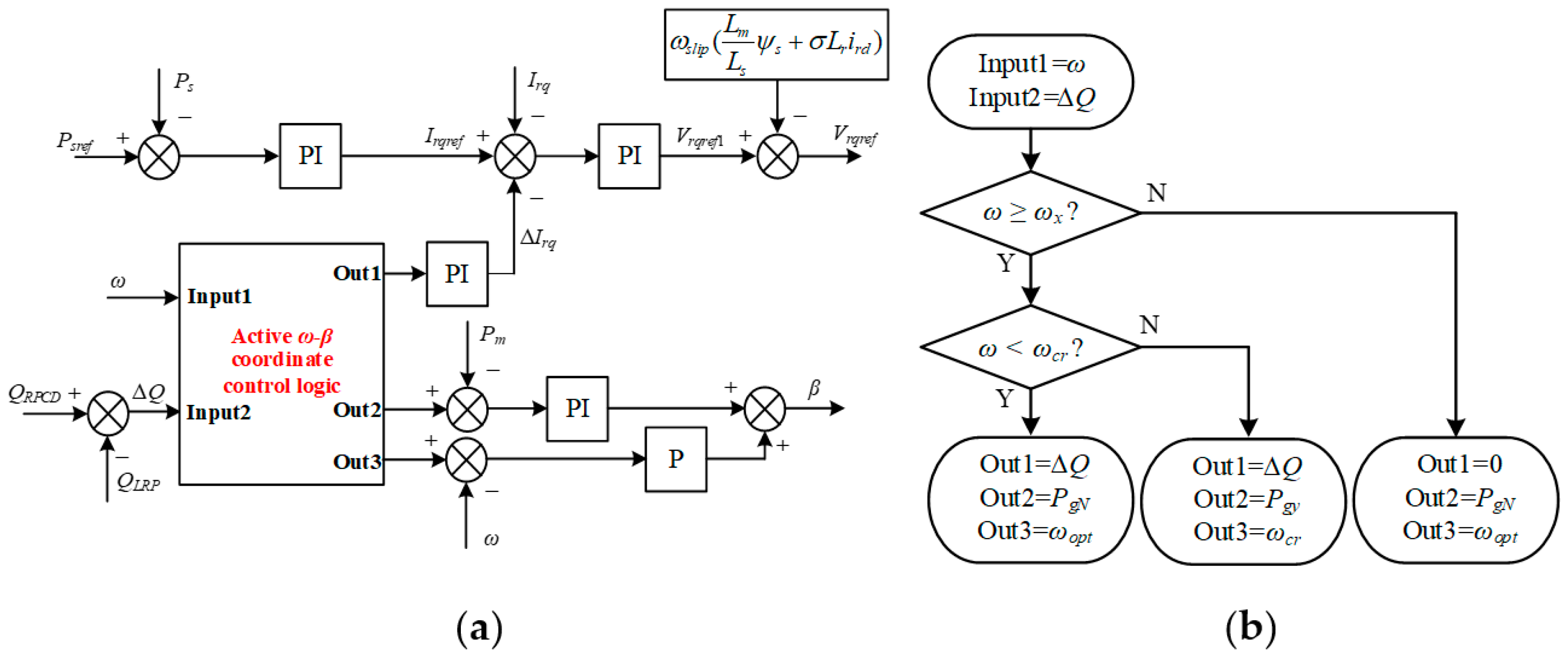
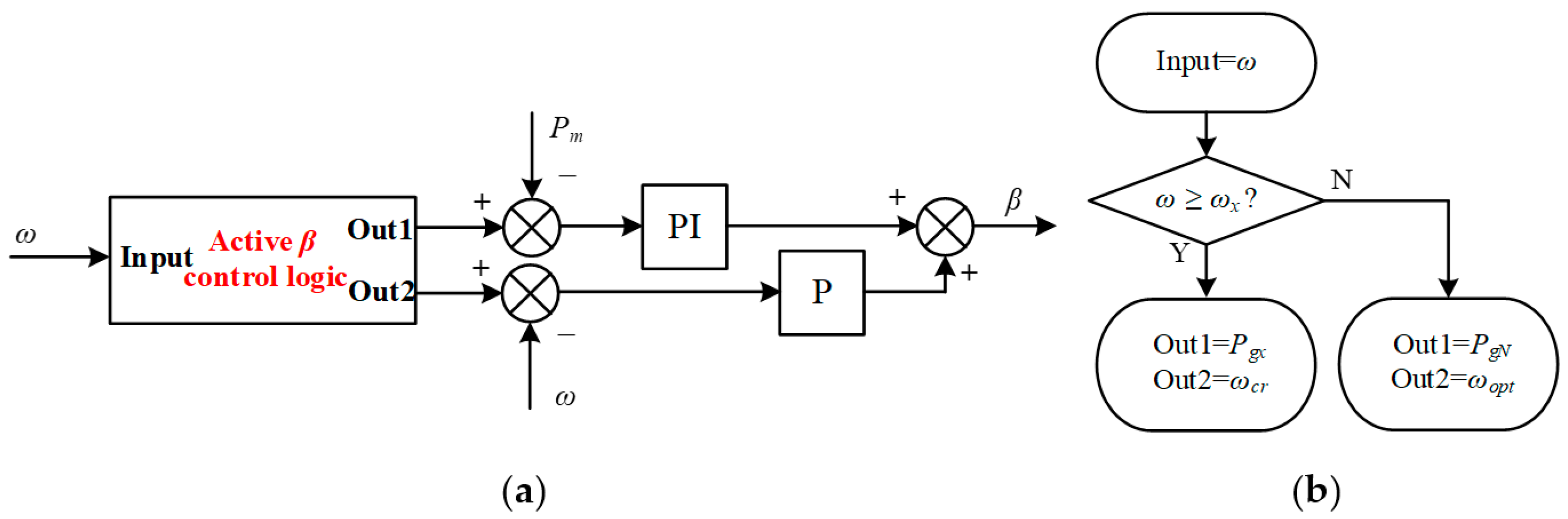
4.1. Active and Reactive Power Coordinate Control Strategy
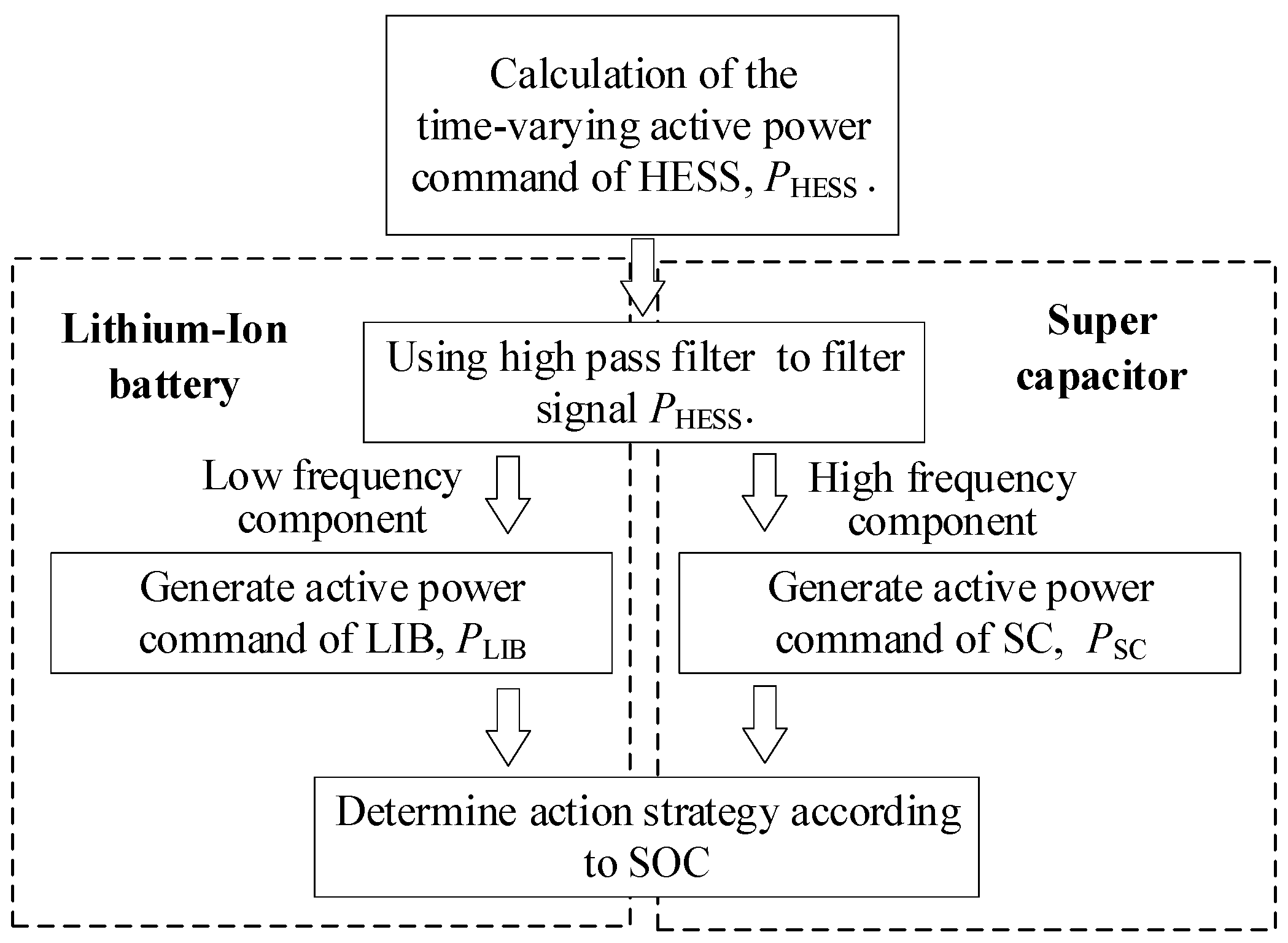
4.2. HESS-Based Auxiliary Control Strategy
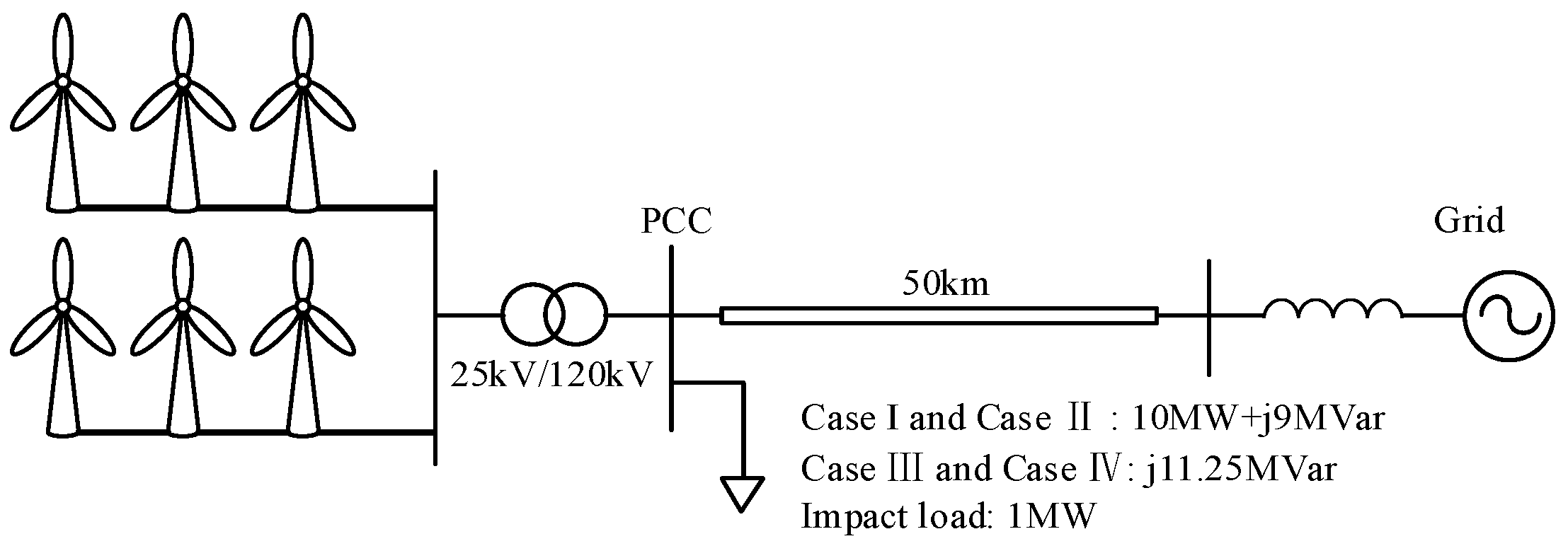
5. Simulation
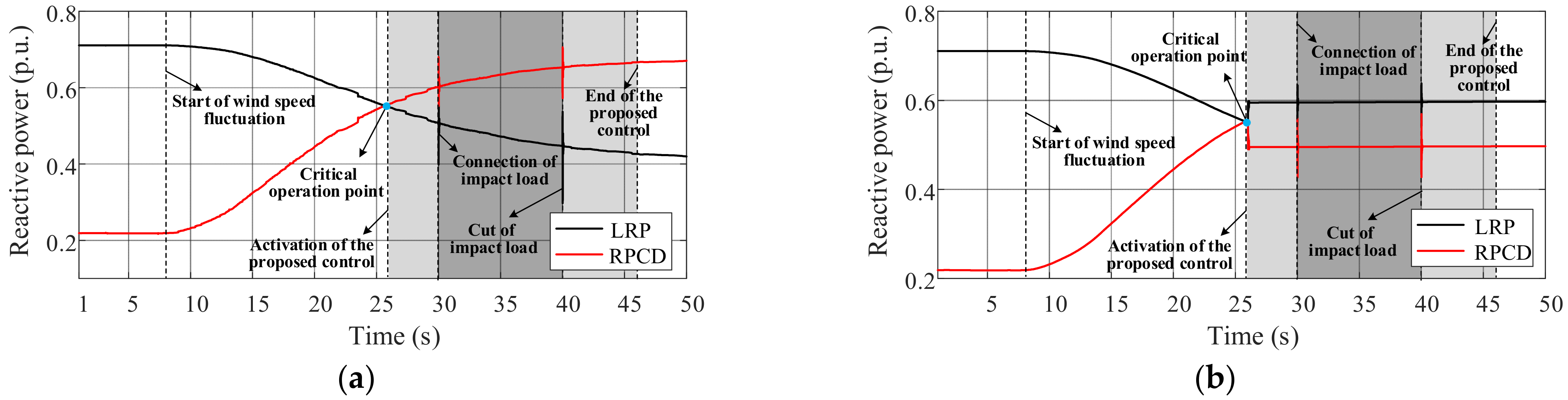
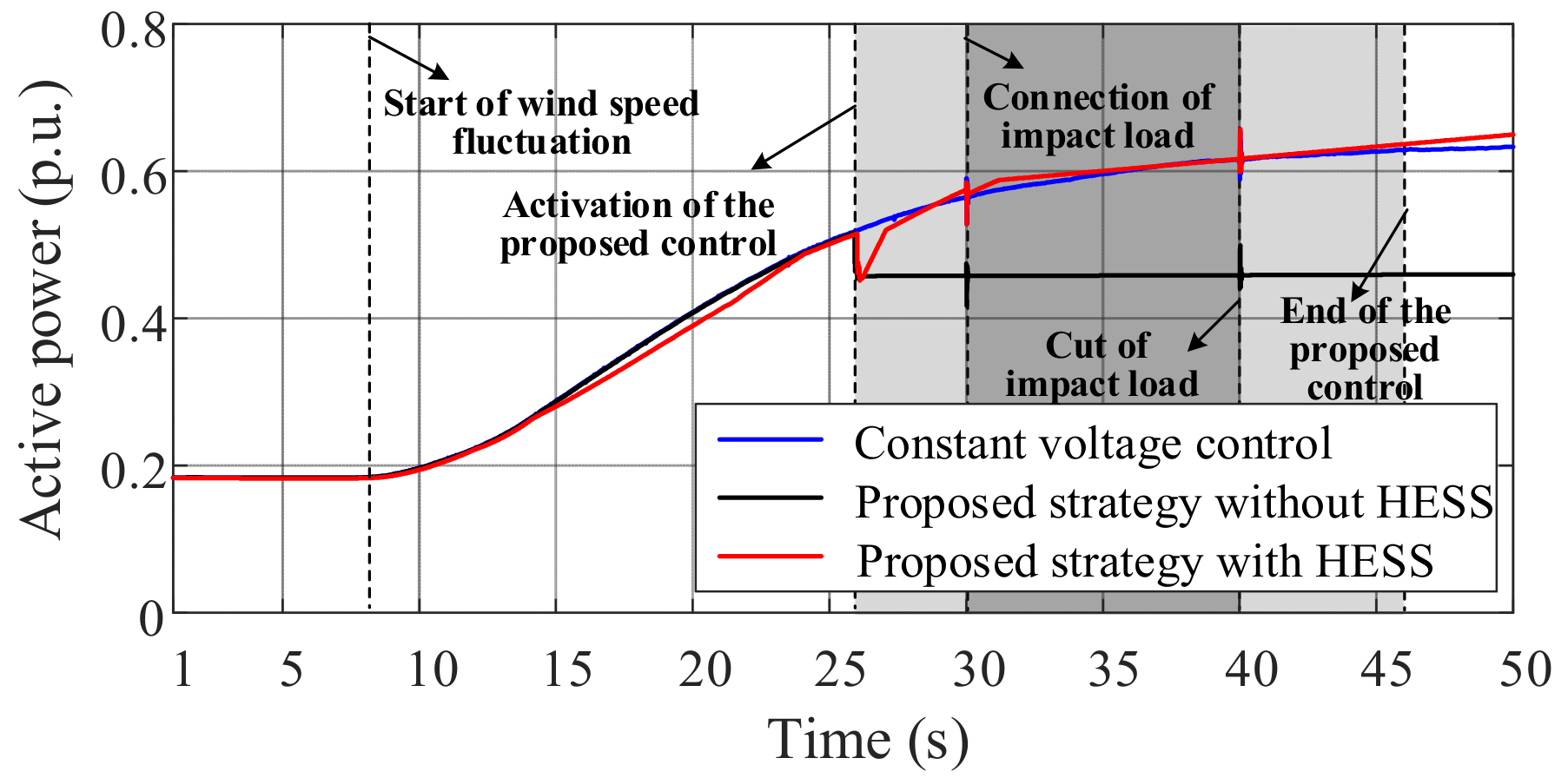
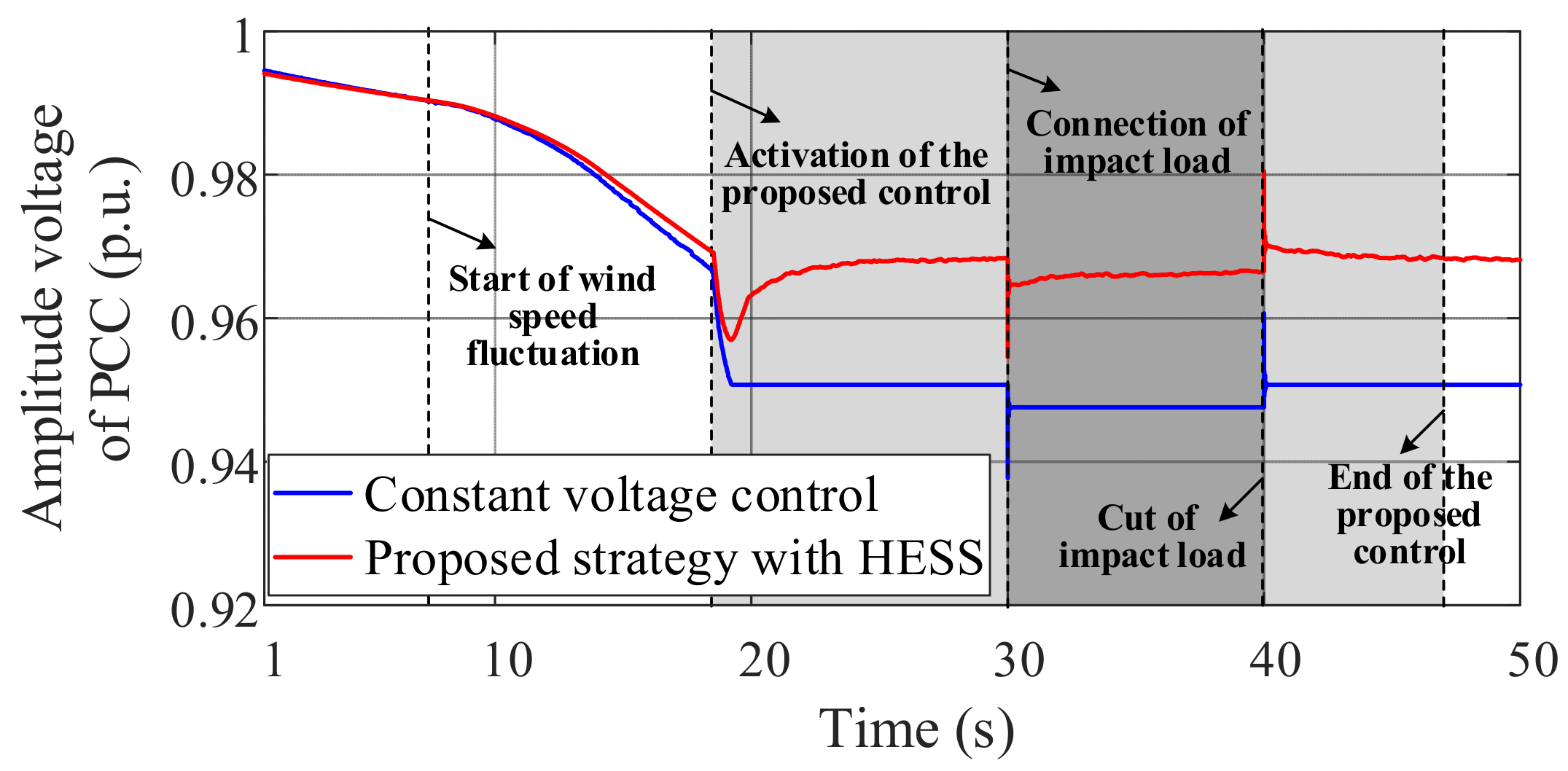
5.1. Case I: ωin ≤ ωx < ωcr
5.2. Case II: ωx = ωcr
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liserre, M.; Cárdenas, R.; Molinas, M.; Rodriguez, J. Overview of Multi-MW Wind Turbines and Wind Parks. IEEE Trans. Ind. Electron. 2011, 58, 1081–1095. [Google Scholar] [CrossRef]
- Liu, J.-H.; Cheng, J.-S. Online Voltage Security Enhancement Using Voltage Sensitivity-Based Coherent Reactive Power Control in Multi-Area Wind Power Generation Systems. IEEE Trans. Power Syst. 2021, 36, 2729–2732. [Google Scholar] [CrossRef]
- Llrab, C.; Oacv, B.; Ercd, C.; Jmg, D.; Ajsf, C. Generalized Predictive Control applied to the DFIG power control using state-space model and voltage constraints. Electr. Power Syst. Res. 2020, 182, 106227. [Google Scholar]
- Tian, X.; Wang, W.; Li, X.; Chi, Y.; Li, Y.; Tang, H. Fault ride through strategy of DFIG using rotor voltage direct compensation control under voltage phase angle jump. CSEE J. Power Energy Syst. 2019, 5, 515–523. [Google Scholar] [CrossRef]
- Mu, G.; Wang, J.; Yan, G. The mechanism of DFIGs grouping tripped off from power grid. CSEE J. Power Energy Syst. 2018, 4, 103–111. [Google Scholar] [CrossRef]
- Suppioni, V.P.; Grilo, A.P.; Teixeira, J.C. Control methodology for compensation of grid voltage unbalance using a series-converter scheme for the DFIG. Electr. Power Syst. Res. 2016, 133, 198–208. [Google Scholar] [CrossRef]
- Liu, Y.; Lin, Z.; Li, M.; Wu, Q.H. On the state-dependent switched energy functions of DFIG-based wind power generation systems. CSEE J. Power Energy Syst. 2020, 6, 318–328. [Google Scholar] [CrossRef]
- Guo, Q.; Sun, H.; Wang, B.; Zhang, B.; Wu, W.; Tang, L. Hierarchical automatic voltage control for integration of large-scale wind power: Design and implementation. Electr. Power Syst. Res. 2015, 120, 234–241. [Google Scholar] [CrossRef]
- Berndt, H.; Hermann, M.; Kreye, H.D.; Reinisch, R.; Scherer, U.; Vanzetta, J. Network and System Rules of the German Transmission System Operators; Verband der Netzbetreiber: Berlin, Germany, 2007. [Google Scholar]
- Alberta Electric Power System Operator. Wind Power Facility Technical Requirements; Alberta Electric Power System Operator: Calgary, AB, Canada, 2004. [Google Scholar]
- ELTRA Transmission System Planning. Specifications for Connecting Wind Farms to the Transmission Network. 2nd ed. Standard ID: ELT1999–411a. 26 April 2000. Available online: https://www.doc88.com/p-7436285682320.html?r=1 (accessed on 6 December 2021).
- China Electric Power Research Institute. Technical Rule for Connecting Wind Farm to Power System. Standard ID: GB/T 19963–2011. 2011. Available online: https://www.chinesestandard.net/PDF/English.aspx/GBT19963-2011 (accessed on 6 December 2021).
- Kafshgari, N.A.; Ramezani, N.; Nouri, H. Effects of high frequency modeling & grounding system parameters on transient recovery voltage across vacuum circuit breakers for capacitor switching in wind power plants. Int. J. Electr. Power Energy Syst. 2019, 104, 159–168. [Google Scholar]
- Abulanwar, S.; Hu, W.; Chen, Z.; Iov, F. Adaptive voltage control strategy for variable-speed wind turbine connected to a weak network. IET Renew. Power Gener. 2016, 10, 238–249. [Google Scholar] [CrossRef]
- Bian, X.Y.; Geng, Y.; Lo, K.L.; Fu, Y.; Zhou, Q.B. Coordination of PSSs and SVC Damping Controller to Improve Probabilistic Small-Signal Stability of Power System With Wind Farm Integration. IEEE Trans. Power Syst. 2015, 31, 2371–2382. [Google Scholar] [CrossRef] [Green Version]
- Global Wind Energy Council. Global Wind Report 2019; Global Wind Energy Council: Brussels, Belgium, 2020; Available online: https://gwec.net/global-wind-report-2019/ (accessed on 7 December 2021).
- Ghosh, S.; Isbeih, Y.J.; Bhattarai, R.; El Moursi, M.S.; El-Saadany, E.F.; Kamalasadan, S. A Dynamic Coordination Control Architecture for Reactive Power Capability Enhancement of the DFIG-Based Wind Power Generation. IEEE Trans. Power Syst. 2020, 35, 3051–3064. [Google Scholar] [CrossRef]
- Dong, Z.; Li, Z.; Du, L.; Liu, Y.; Ding, Z. Coordination Strategy of Large-Scale DFIG-Based Wind Farm for Voltage Support With High Converter Capacity Utilization. IEEE Trans. Sustain. Energy 2020, 12, 1416–1425. [Google Scholar] [CrossRef]
- Tian, J.; Zhou, D.; Su, C.; Chen, Z.; Blaabjerg, F. Reactive Power Dispatch Method in Wind Farms to Improve the Lifetime of Power Converter Considering Wake Effect. IEEE Trans. Sustain. Energy 2016, 8, 477–487. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Xu, Z.; Zhang, J.; Meng, K. Variable Droop Voltage Control for Wind Farm. IEEE Trans. Sustain. Energy 2017, 9, 491–493. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Guo, Q.; Sun, H.; Huang, S.; Xue, Y. Coordinated Voltage Control of a Wind Farm Based on Model Predictive Control. IEEE Trans. Sustain. Energy 2016, 7, 1440–1451. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Wu, Q.; Wang, J.; Liu, Z.; Shahidehpour, M.; Xue, Y. Combined Active and Reactive Power Control of Wind Farms Based on Model Predictive Control. IEEE Trans. Energy Convers. 2017, 32, 1177–1187. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wang, S.; Ye, L.; Fang, J. A coordinated dispatch method with pumped-storage and battery-storage for compensating the variation of wind power. Prot. Control. Mod. Power Syst. 2018, 3, 2. [Google Scholar] [CrossRef] [Green Version]
- Londero, R.R.; Affonso, C.M.; Vieira, J.P.A. Long-Term Voltage Stability Analysis of Variable Speed Wind Generators. IEEE Trans. Power Syst. 2014, 30, 439–447. [Google Scholar] [CrossRef]
- Ouyang, J.; Tang, T.; Yao, J.; Li, M. Active Voltage Control for DFIG-based Wind Farm Integrated Power System by Coor-dinating Active and Reactive Powers under Wind Speed Variations. IEEE Trans. Energy Convers. 2019, 34, 1504–1511. [Google Scholar] [CrossRef]
- Gabash, A.; Li, P. Active-Reactive Optimal Power Flow in Distribution Networks With Embedded Generation and Battery Storage. IEEE Trans. Power Syst. 2012, 27, 2026–2035. [Google Scholar] [CrossRef]
- Gabash, A.; Li, P. On the control of main substations between transmission and distribution systems. In Proceedings of the 14th International Conference on Environment and Electrical Engineering (EEEIC), Krakow, Poland, 10–12 May 2014. [Google Scholar]
- Mohagheghi, E.; Alramlawi, M.; Gabash, A.; Blaabjerg, F.; Li, P. Real-Time Active-Reactive Optimal Power Flow with Flexible Operation of Battery Storage Systems. Energies 2020, 13, 1697. [Google Scholar] [CrossRef] [Green Version]
- Gabash, A.; Li, P. On Variable Reverse Power Flow-Part II: An Electricity Market Model Considering Wind Station Size and Location. Energies 2016, 9, 235. [Google Scholar] [CrossRef] [Green Version]
- Khazaei, J.; Nguyen, D.H. Distributed Consensus for Output Power Regulation of DFIGs with On-Site Energy Storage. IEEE Trans. Energy Convers. 2018, 34, 1043–1051. [Google Scholar] [CrossRef]
- de Carvalho, W.C.; Bataglioli, R.P.; Fernandes, R.A.; Coury, D.V. Fuzzy-based approach for power smoothing of a full-converter wind turbine generator using a supercapacitor energy storage. Electr. Power Syst. Res. 2020, 184, 106287. [Google Scholar] [CrossRef]
- Kadri, A.; Marzougui, H.; Aouiti, A.; Bacha, F. Energy management and control strategy for a DFIG wind turbine/fuel cell hybrid system with super capacitor storage system. Energy 2019, 192, 116518. [Google Scholar] [CrossRef]
- Baros, S.; MD, I. A Consensus Approach to Real-Time Distributed Control of Energy Storage Systems in Wind Farms. IEEE Trans. Smart Grid 2019, 10, 613–625. [Google Scholar] [CrossRef]
- Kim, J.; Muljadi, E.; Gevorgian, V.; Hoke, A.F. Dynamic Capabilities of an Energy Storage-Embedded DFIG System. IEEE Trans. Ind. Appl. 2019, 55, 4124–4134. [Google Scholar] [CrossRef]
- Prajapat, G.P.; Senroy, N.; Kar, I. Estimation based enhanced maximum energy extraction scheme for DFIG-wind turbine systems. Sustain. Energy Grids Networks 2020, 26, 100419. [Google Scholar] [CrossRef]
- Rahimi, M. Coordinated control of rotor and grid sides converters in DFIG based wind turbines for providing optimal reactive power support and voltage regulation. Sustain. Energy Technol. Assess. 2017, 20, 47–57. [Google Scholar] [CrossRef]
- Ju, C.; Wang, P.; Goel, L.; Xu, Y. A Two-layer Energy Management System for Microgrids with Hybrid Energy Storage con-sidering Degradation Costs. IEEE Trans. Smart Grid 2017, 9, 6047–6057. [Google Scholar] [CrossRef]
- Kawan, Y.K.; Gabash, A. Impact of Series Resonant Power Conditioning System Losses in Optimal Power Flow. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Operating Conditions | State | |||
|---|---|---|---|---|---|
| PHESS | SOCL | SOCS | LIB | SC | |
| 1 | >0 | Discharge | Discharge | ||
| 2 | Discharge | Over discharge protection | |||
| 3 | Over discharge protection | Discharge | |||
| 4 | Over discharge protection | Over discharge protection | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Wang, Y.; Zeng, Q.; Liao, J.; Zheng, Z.; Chen, S.; Liao, Y. An Active Voltage Coordinate Control Strategy of DFIG-Based Wind Farm with Hybrid Energy Storage System. Electronics 2021, 10, 3060. https://doi.org/10.3390/electronics10243060
Song Y, Wang Y, Zeng Q, Liao J, Zheng Z, Chen S, Liao Y. An Active Voltage Coordinate Control Strategy of DFIG-Based Wind Farm with Hybrid Energy Storage System. Electronics. 2021; 10(24):3060. https://doi.org/10.3390/electronics10243060
Chicago/Turabian StyleSong, Yuyan, Yuhong Wang, Qi Zeng, Jianquan Liao, Zongsheng Zheng, Shiyu Chen, and Yiben Liao. 2021. "An Active Voltage Coordinate Control Strategy of DFIG-Based Wind Farm with Hybrid Energy Storage System" Electronics 10, no. 24: 3060. https://doi.org/10.3390/electronics10243060
APA StyleSong, Y., Wang, Y., Zeng, Q., Liao, J., Zheng, Z., Chen, S., & Liao, Y. (2021). An Active Voltage Coordinate Control Strategy of DFIG-Based Wind Farm with Hybrid Energy Storage System. Electronics, 10(24), 3060. https://doi.org/10.3390/electronics10243060