1. Introduction
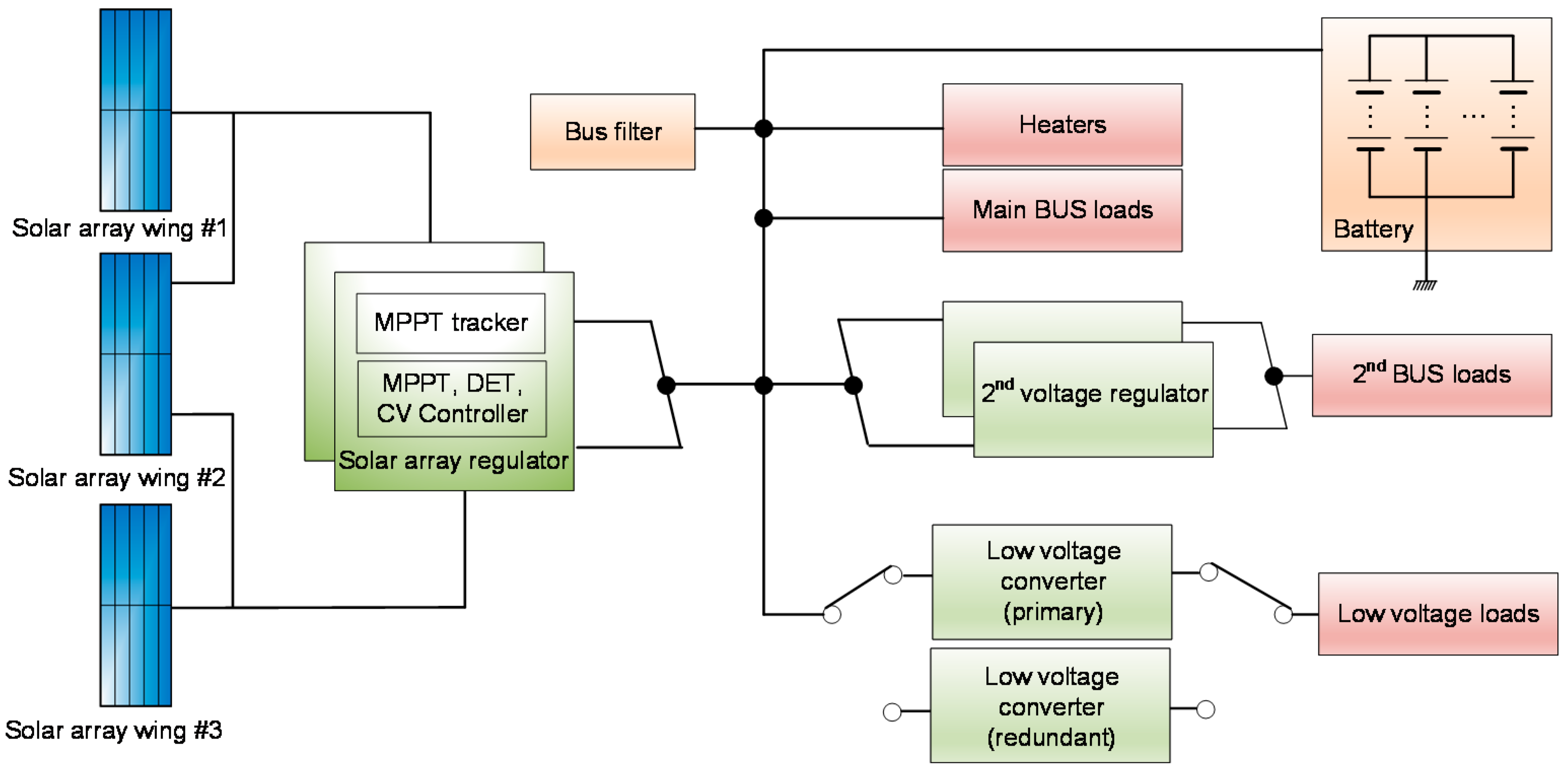
Monitoring the status of LEO satellites is limited because of limited ground access time due to the non-contact duration in orbit. Therefore, for optimal mission design and mission expansion, simulators are required to predict the satellite operation. Satellite simulators require the development and verification of each sub-system, such as attitude, power, S/W, and thermal control. Power system simulators are critical because the power system is responsible for generating, distributing, and storing energy for the operation of the satellite, and it is closely related to the mission design, satellite lifespan, and fault management [
1,
2].
The battery is one of the main electronic components related to the lifespan of the satellite and error management. In general, mission and error management designs must ensure that the batteries used for LEO satellites are in the operating range that guarantees expected performance of the satellite [
3,
4]. However, because LEO satellites have limited communication with ground stations, it is necessary to predict the power state, including the non-contact duration. Such state prediction varies depending on the operating period, season, attitude, and mission of the satellite [
5,
6,
7], which makes its mathematical modeling difficult.
In previous studies, design and power analysis were performed in terms of the power budget [
8]. That is, the power that can be generated is analyzed assuming the eclipse duration, sun irradiance, temperature, and angle with the sun in the worst condition. The power consumption is calculated by combining the average duty (or maximum values of each load of the satellite bus) and the payload. Accordingly, the power consumption combination composes a table for each mission condition and operation mode of the satellite. Then, the generated power and the consumed power are compared over the time, which is required to predict the state or current of the satellite battery [
9]. However, in this analysis of the generated power, the operating period, attitude, and temperature conditions may be different from the assumptions, so that it may show a significant difference from the actual data from the orbit. Moreover, in the case of power consumption, except for some loads operating at a constant duty, the generation time and consumption values of general loads, such as actuators and heaters, are different from the assumed combinations. Thus, the estimated value can be very different from the actual data. Since the power generated and power consumed continuously vary depending on the satellite operation period and the given method, it is difficult to use the analysis developed for the existing power budget to determine the current to analyze the battery state. In addition, the inability to accurately predict the operation of the power system and battery may prevent a precise analysis when a task change or an operation analysis is required for the changes in the operating environment [
10,
11,
12,
13].
Another approach in previous studies is the time series prediction analysis method, for example, a stochastic estimation method using ARIMA or SARIMA for ground applications [
14,
15]. This probability-based analysis of the satellite system can be more accurate than the power-budget-based analysis, however, it is impossible to actively estimate the change in the mission and the attitude change of the low-orbit satellite system. Therefore, it may not be utilized when mission expansion and operation change are necessary, which is same to the power budget-based analysis.
Therefore, in this study, a Bi-LSTM deep neural network is proposed to predict the charging and discharging current of the satellite battery. The proposed technique is based on the optimal Bi-LSTM selection and input/output design to respond to mission changes. The proposed technique is applied to the KOMPSAT-3A and KOMPSAT-5 LEO satellites to compare and analyze the on-orbit measurement data and prediction results. The superior performance of the data-based learning applied in this study is demonstrated by comparing with the SARIMA.
The contribution of this paper is summarized as follows:
We propose a Bi-LSTM-based network to reliably predict battery charge and discharge currents in the non-contact duration of low-orbit satellites.
The proposed technique is one of the first techniques that can produce an accurate prediction, even in the presence of task change and expansion.
To demonstrate the prediction performance, we apply the proposed technique to the KOMPSAT-3A and 5 satellites with different environmental conditions such as mission power, period, and orbit.
This paper is organized as follows.
Section 2 discusses about how the KOMPSAT-3A and KOMPSAT-5 LEO satellites and the algorithms are used in this study, and describes the structure of the data-learning Bi-LSTM used to predict the battery charge/discharge current. It also describes the probabilistic-based SARIMA used as the comparison method.
Section 3 shows how the power system and other characteristics of KOMPSAT-3A and KOMPSAT-5 satellites affect the signal processing used in the simulations. These include the characteristic orbital data, denoising preprocessing requirements, the parameters of the SARIMA model, and the selection methods for the network and hyper-parameters of bi-LSTM.
Section 4 analyzes the prediction results of the LEO satellite’s charge/discharge current and compares orbit data, the operating period, and the mission performance errors based on the learned results using RMSE, MAPE, correlation coefficient, and performance analysis indicators. Finally,
Section 5 draws the conclusion of the paper.
3. Proposed Method
Because the battery-related profile of a LEO satellite has a nonlinear characteristic that depends on the SOC of the battery, the solar array temperature, the attitude of the satellite, the orbit position, the satellite bus and payload temperature, and the degradation effect of each unit, mathematical modeling has limitations. Therefore, it is necessary to consider data-based modeling methods [
24,
25,
26], for which a preprocessing stage is required to prevent overfitting and to optimize the learning time. In the case of LEO satellite data, preprocessing is required because the data are of various types and multiple periods. In addition, for a successful data-based learning, it is necessary to select input features, a network configuration, and a parameter selection method related to the prediction output. In this section, the proposed Bi-LSTM learning model configuration, the satellite data specificity, the process for each step (including preprocessing), and the parameter selection for learning are described.
3.1. Features and Bi-LSTM Network
The features used for estimating the current profile of the LEO satellites are the sat-elite’s orbital position, attitude quaternion, mission mode of the satellite, eclipse state, week and date information for one year, the week information after launch, and the solar array angle. These features are closely related to the battery charging/discharging current and correspond to values that can be accurately predicted on the ground or determined through mission design.
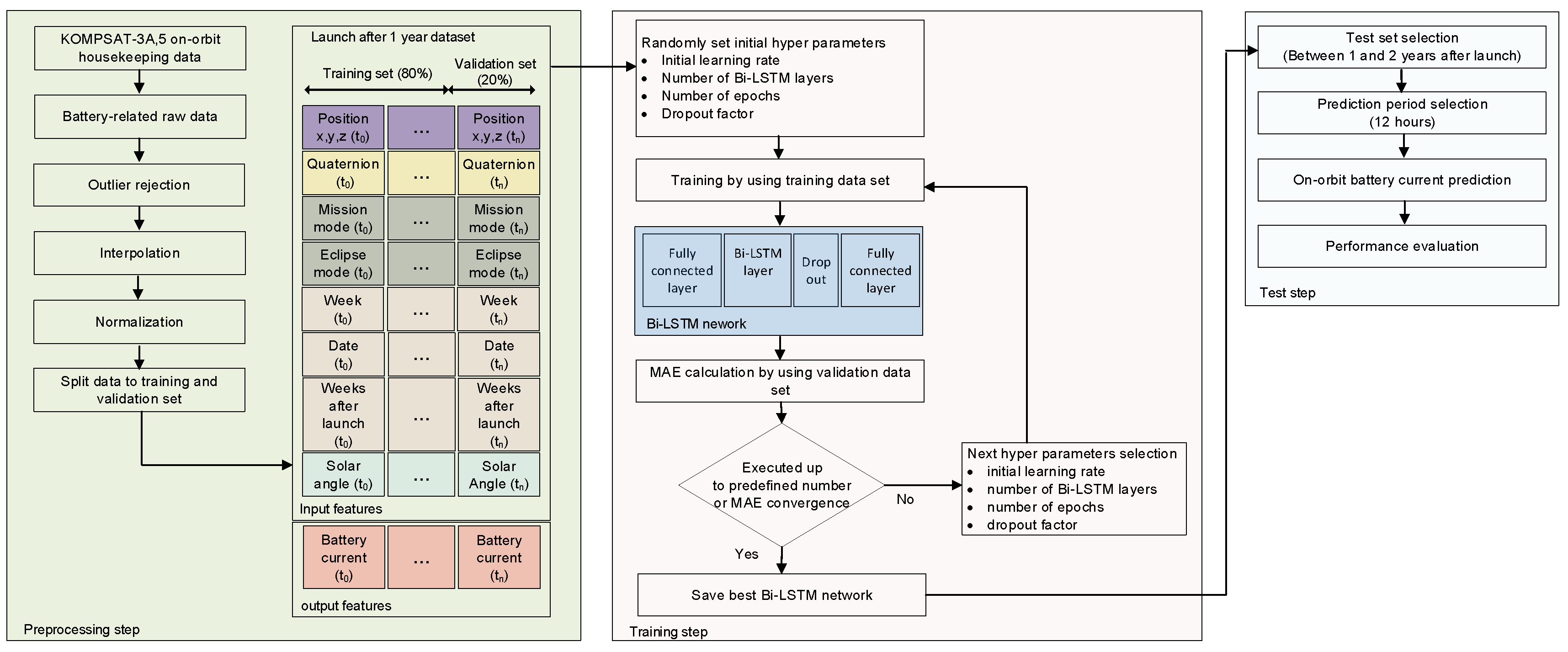
Figure 4 shows the framework for Bi-LSTM-based battery current prediction. The whole process for prediction is carried out in three steps. First, preprocessing is per-formed to prepare the data for learning. For the preprocessing process, the raw data of both of the features for prediction and battery current among the house keeping data of two years after launch are collected for each satellite. Afterwards, outlier rejection, interpolation, and normalization processes are performed to suit the characteristics of the satellite’s raw data. Each preprocessed feature is divided into training and validation sets for learning and optimization. Additionally, a test set for performance evaluation is selected. In this paper, similarly to the SARIMA, 80% of the data for one year after launch are classified as a training set and 20% as a validation set. In addition, data from one to two years after launch are used as the test set.
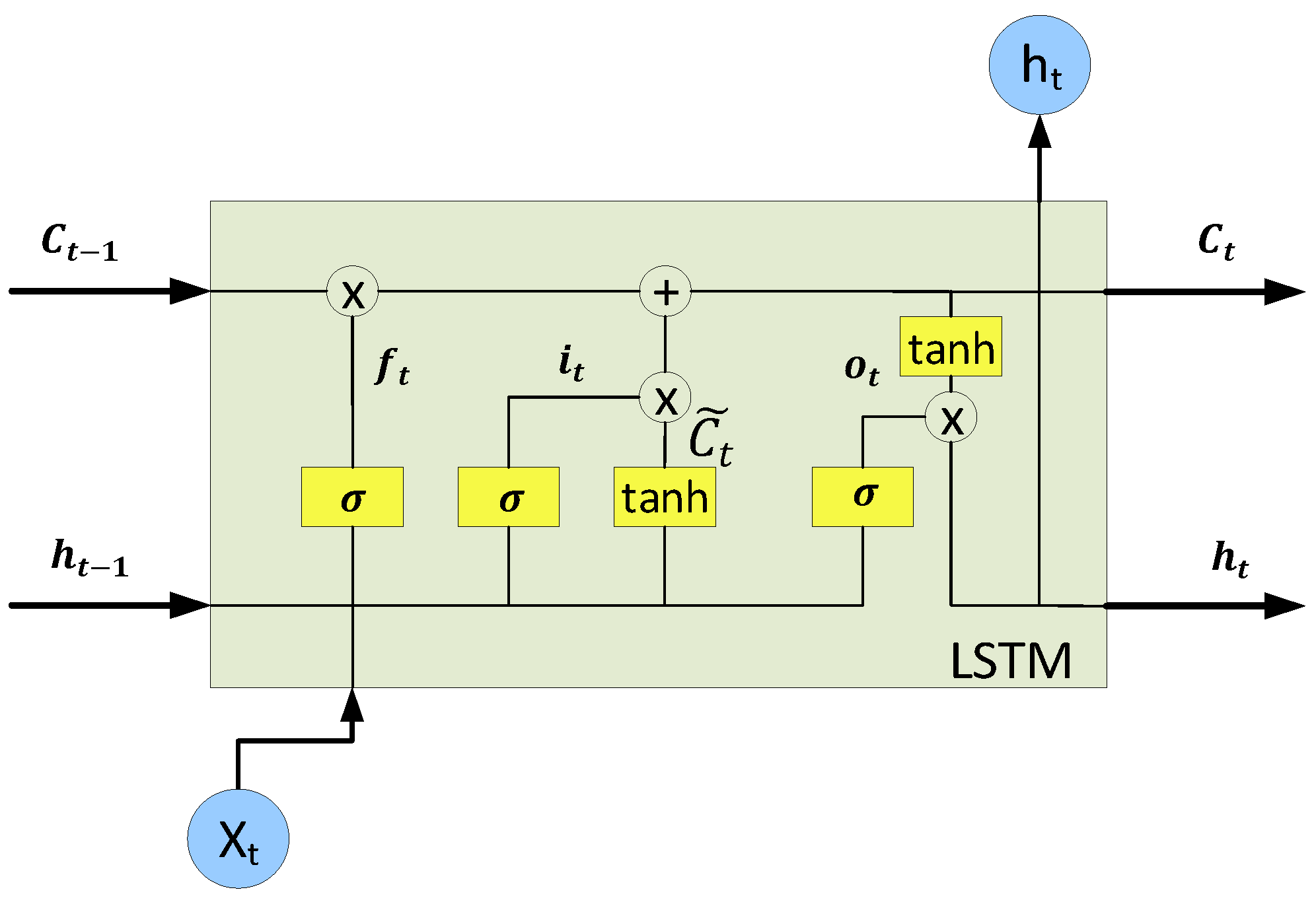
Next, a learning process for Bi-LSTM model selection is performed. The Bi-LSTM network consists of a fully connected layer, a Bi-LSTM layer, a dropout layer, and a fully connected layer. The Bi-LSTM layer is selected because the data of the battery current of the low-orbit satellite are meaningful in that both forward and backward time series have a causal relationship in the prediction. In addition, a dropout layer is added to prevent overfitting. In addition, since the battery current is predicted using multiple inputs, the fully connected layer is used for the input and output. As parameters for the Bi-LSTM network model, the initial learning rate, bi-layer number, training epoch, and dropout factor are selected. After that, training is performed using each randomly selected initial value, and the MAE, a cost function, is calculated using the validation dataset. Next, by using Bayesian optimization, the next model parameter is selected and learning is repeated until the cost function converges or reaches a specified number of times. The Bi-LSTM network model is selected using the parameters chosen through this process. Finally, performance evaluation is performed using the selected test dataset. When evaluating the performance, the prediction period is selected by considering the contact period of the ground station of KOMPSAT-3A and 5. In this paper, 12 h is selected by assuming the worst condition of the contact period with the ground.
Figure 5 shows the battery prediction technique proposed in this study. Pretraining is performed using preprocessed features. Prediction is performed using the best Bi-LSTM network selected through the process in
Figure 4. The input features for predicting the battery current are factors that are predictable or designed on the ground, and normalization is performed to input them into the learning model. Then, the processed input features are input into the pretrained model to verify the output value. Finally, the features selected as input/output in this paper undergo a process to restore the predicted battery current value while going through the normalization process.
3.2. Preprocessing for Bi-LSTM Network Training
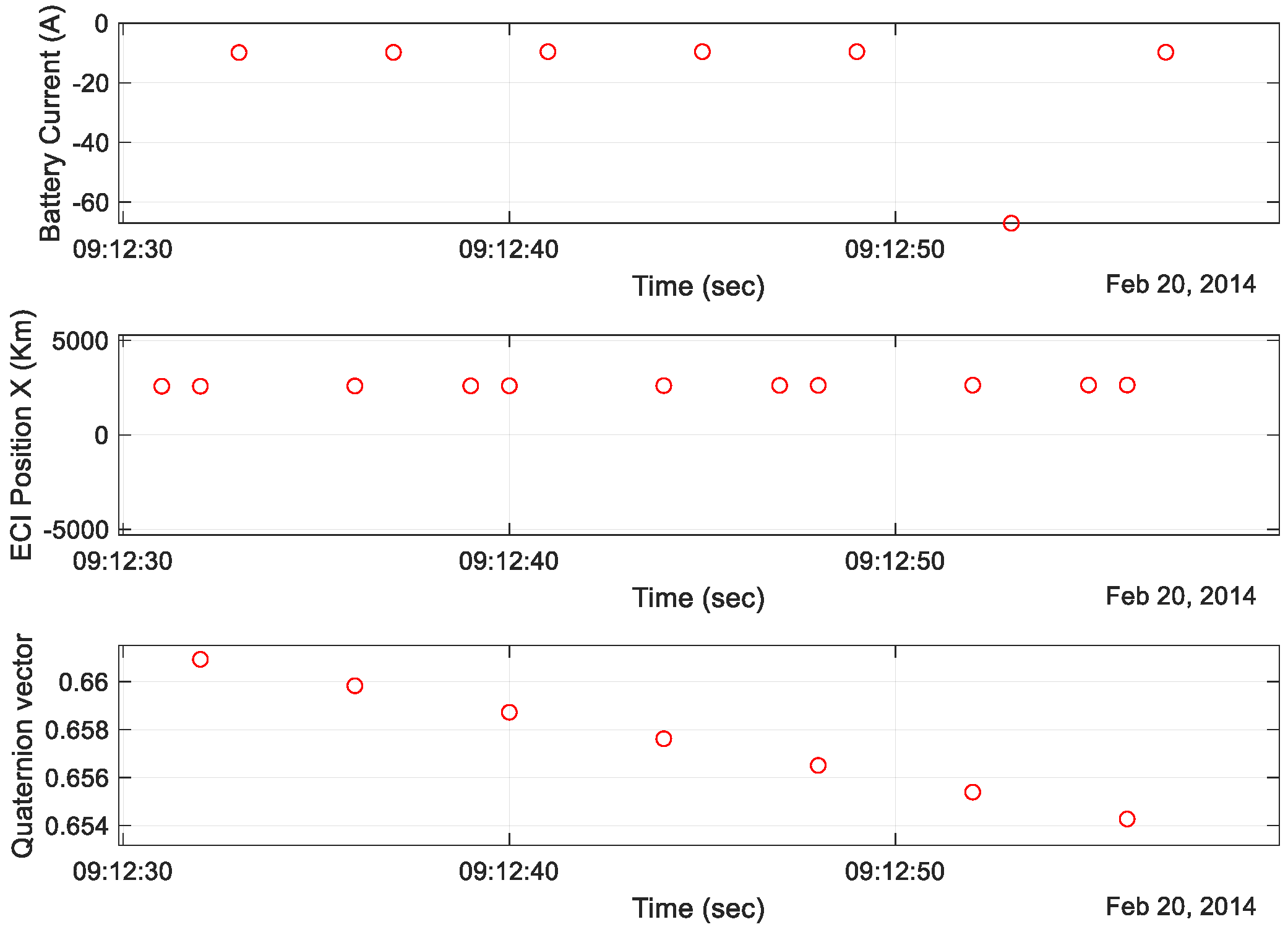
Satellites operate in harsh environments with radiation compared to the ground. Therefore, a SEU may occur on account of these radiation conditions, and instantaneous noise may occur when satellite data is stored and transmitted. Therefore, noise occurs independently of the physical correlation, as shown by the values in the blue circles in
Figure 6. The noise must be removed because it can damage the accuracy of the learning model. In this study, the IQR method is used to remove outliers, as shown in Equations (11) and (12). The IQR is a powerful method for detecting outliers in data. It arranges the data in ascending order and divides them into quadrants to determine the normal range. The IQR refers to the value obtained by subtracting the 25% quartile from the value of the 75% quartile and by assigning a weight to this value. The low and high limits are set as in Equations (11) and (12), and the data between these values are estimated to be normal. Generally, a weight of 1.5 is used for the IQR. However, when this is used for the KOMPSAT satellite, some normal data are judged as outliers. Therefore, because the frequency of occurrence of KOMPSAT-3A and 5 satellites data noise is low, it is necessary to select a weight other than 1.5. In this paper, while changing the weight of the IQR from 1.5 to 3 in the raw data of the satellite, 2.5, which was a value from which outliers were appropriately removed, is selected as shown in Equations (11) and (12).
where
Q1 and
Q3 are the 25% and 75% quartiles, respectively.
Because of the limited access time with the ground station, the LEO satellite transmits housekeeping data over several cycles within the downlink budget. Therefore, the gap time of housekeeping data and the time at which they are saved are also different, as shown in
Figure 7. In addition, an empty information section is created when outliers are removed.
Therefore, to use different period information and empty sections for learning, synchronization through interpolation of these data is required. In this study, synchronization is performed by conducting a linear-based interpolation [
27,
28].
There are various types of data for the satellite features that are used for training, as shown in
Figure 7. That is, data of various scales and ranges, such as trajectory, attitude, and current, are used. It also contains categorical data such as mission mode. An example of categorical data includes the date of the month between 0 and 31, the satellite attitude quaternion between 0 and 1, the position of the orbit in kilometers, and the eclipse mode between 1 and 4. The data are collected in various ranges and units. Therefore, if these data are directly used for learning, it may be difficult to optimize them according to the local minimum.
There are two commonly used generalization methods: min-max and z-score. Min-max normalization can process all features at the same scale; however, it has the disadvantage of being sensitive to outliers. In this study, because outliers are eliminated by the IQR method, all features are normalized using the min-max method, as shown in Equation (13).
3.3. Bi-LSTM Network Parameter Selection for Training
Data-driven learning requires parameter selection. In this study, we optimize the parameters using a Bayesian optimization based on probability estimation [
29]. Each value is selected using the initial learning rate, number of Bi-LSTM layers, number of epochs, and dropout factors as optimization variables. The overall order is as follows [
30]:
Randomly select an initial value
(,, );
Estimate the surrogate model probability based on the results of (, f) , f);
Select , which is the maximum cost function based on the result of Step 2, and calculate f);
Re-perform the probabilistic estimation in surrogate mode including , f);
Repeat a predefined number of n times or until the cost function converges.
Where ilr is the initial learning rate, nb is the number of Bi-LSTM layers, ne is the number of epochs, and df is the dropout factor.
The cost function for optimization in this study considers the periodic characteristics of the satellite data and the LEO satellite battery power simulator. Therefore, the error of the average concept is more important. Thus, the optimal parameter is selected through Equation (14). In addition, 80% of the data for each month from the one-year dataset are used as the training dataset. Similar to the SARIMA model, the remaining 20% are used as the validation dataset for optimization:
where
n is the number of verification data,
is the actual verification data value, and
is the Bi-LSTM model predicted data.
Table 1 lists the parameters used for the Bi-LSTM network training.
4. Experiments and Results
As mentioned in
Section 1, in order to develop a ground-based power simulator, it is necessary to predict the charge and discharge current profile of a battery. Therefore, we utilize the data features of one year after the launch of each satellite to train the Bi-LSTM network and SARIMA. Subsequently, the battery current prediction results for the following year are comparatively analyzed. The configurations of the training PC are i7-7700 CPU, 128 GB memory, and two 2080-Ti GPUs connected in parallel. The designed Bi-LSTM network takes approximately 180 to 300 s per epoch.
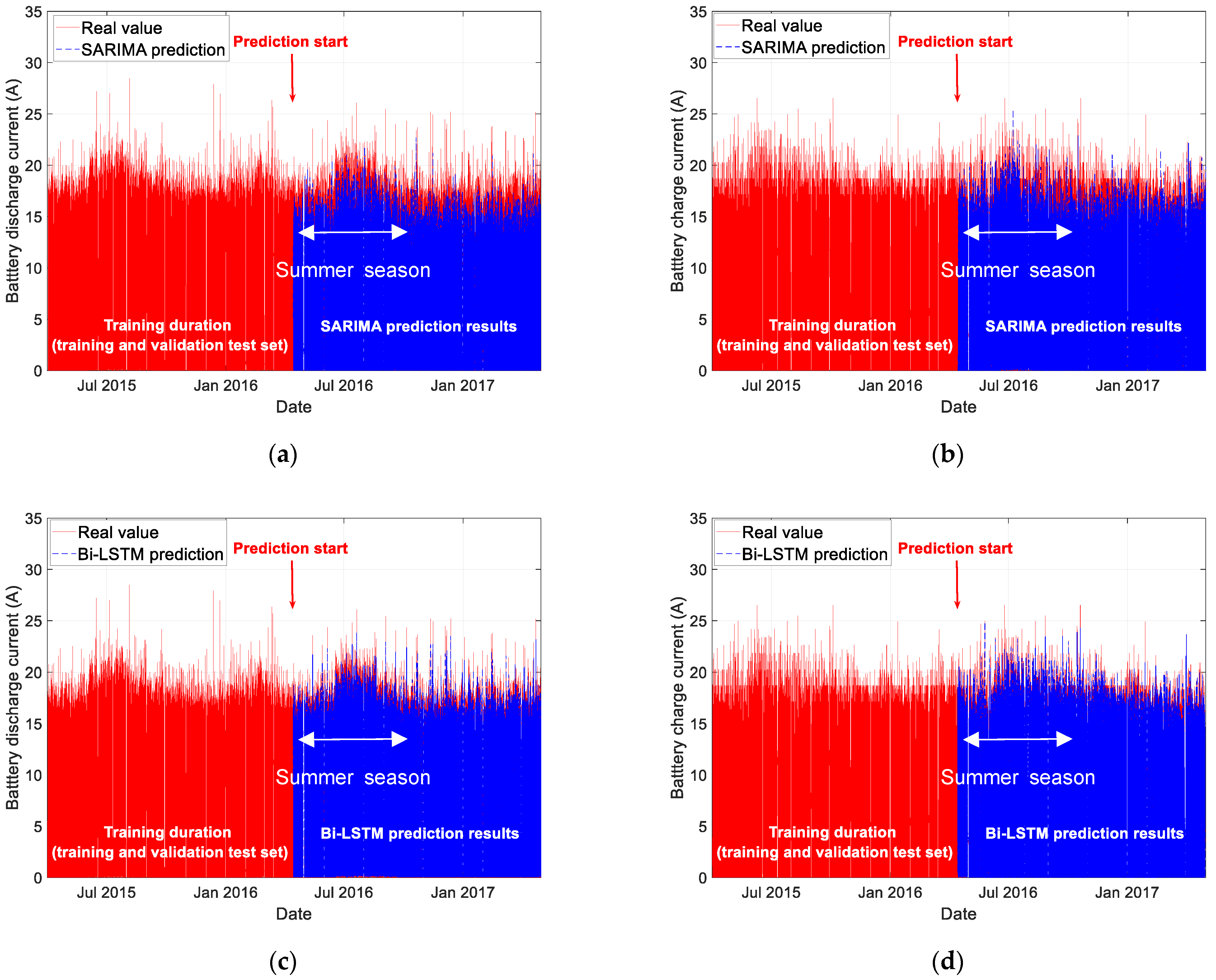
Figure 8 shows the actual battery current of the KOMPSAT-3A satellite, as well as the Bi-LSTM network and SARIMA prediction results. In the figure, the solid red line represents the actual value, and the blue dashed line shows the predicted value. Data for approximately one year after launch are used for training and validation. Then, we compare the prediction results for approximately one year. The prediction period is 12 h in consideration of the ground contact period, and this is applied equally to KOMPSAT-3A and 5. The orbit of the KOMPSAT-3A satellite has a periodic eclipse period for one year, and the maximum discharge and charge current vary depending on the change in the eclipse period, the sun irradiation, and the temperature, depending on the season.
Regarding the discharge current of the KOMPSAT-3A satellite, the maximum discharge current occurs in the summer season. This is because in summer, the distance to the sun is the furthest, which reduces the power generated, which in turn increases the battery charging and discharging current. As shown in
Figure 8a, SARIMA seems to estimate the seasonal change in which the maximum discharge current occurs in the summer season; however, it shows an error in the maximum discharge current value of the entire season. As shown in
Figure 8c, the prediction result estimated through Bi-LSTM can estimate the trend in which the maximum discharge current occurs in summer. In addition, it can be observed that the prediction error of the maximum discharge current for one year is also relatively reduced compared to SARIMA.
The charging current is causally generated according to the discharge current, and slow charging is performed from the maximum charging current section to the tapering charging section according to the charging state. Accordingly, the amount of charging current increases in summer as does the discharge current. As shown in
Figure 8b,d, the trend of the peak charging current in summer is estimated by both SARIMA and Bi-LSTM; nevertheless, the prediction error is relatively small for Bi-LSTM. In general, an increase in the maximum discharge current occurs on account of the aging of the satellite. However, in the case of the KOMPSAT-3A satellite, there is no significant change in the maximum charge and discharge current within the operating period of two years.
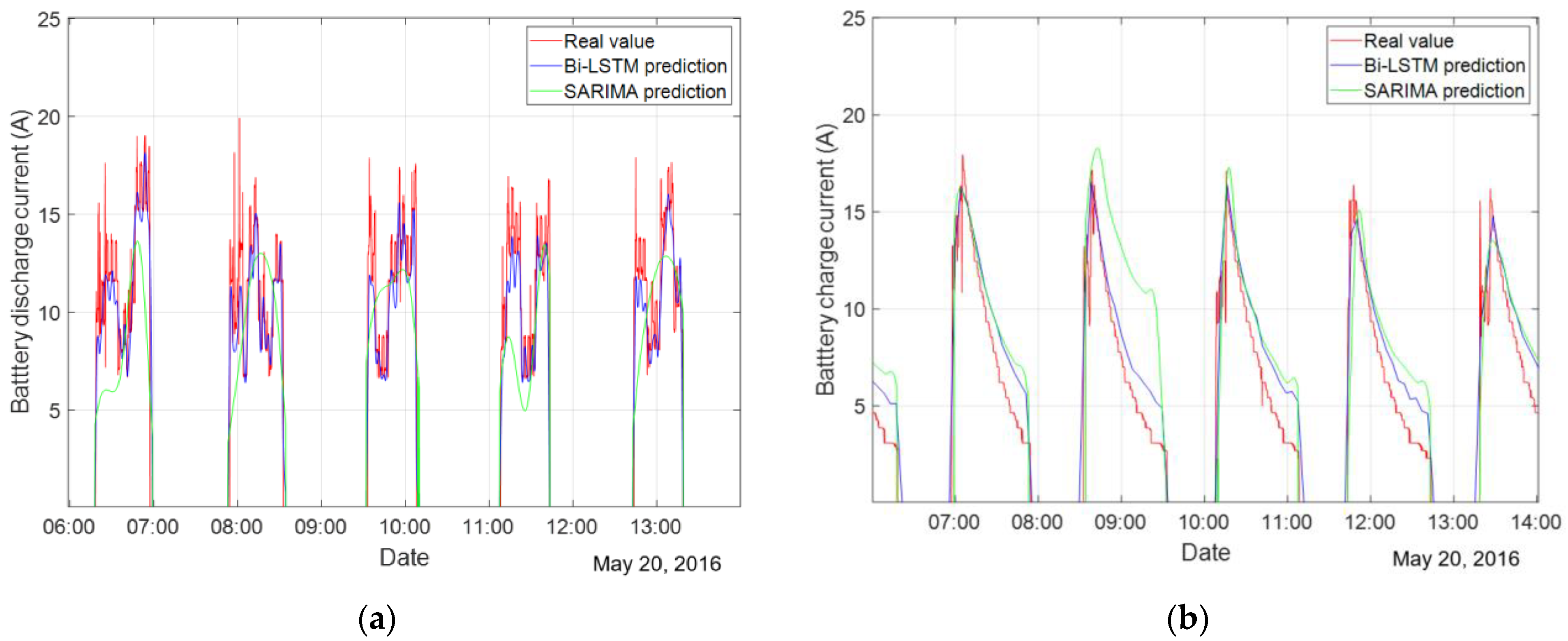
Figure 9 shows the enlarged discharge and charge current prediction results of the KOMPSAT-3A satellite, including the mission duration of 20 May 2016. Discharge occurs periodically and non-periodically by the power demand that exceeds the amount of power generated in the eclipse and mission duration. As shown in the
Figure 9a, discharge usually occurs in the periodic eclipse section. It is evident that charging is performed in the sun section. In the case of Bi-LSTM, it has an error in terms of the maximum discharge current. However, it can be confirmed that it is possible to reproduce the fluctuation of the discharge current that can occur due to the attitude change and mission mode. On the other hand, in the case of the SARIMA estimation, it is not possible to reproduce the actual current fluctuation in the discharge section.
In the case of the charging current, as shown in
Figure 9b, after the eclipse period has passed, charging takes place for the duration of the sun irradiation. In the case of the KOMPSAT-3A satellite, charging is performed under the allowable charging current range of the battery, and tapering charging is performed according to the state of charge. As shown in the figure, the Bi-LSTM-based charging current is similar to the actual value compared to SARIMA. However, as shown in the estimation results from 8:30 to 9:30 in
Figure 8b, a charging current prediction independent of the previous discharge amount and satellite state occurs in SARIMA, whereas in the case of Bi-LSTM, such predictions do not occur.
As observed in
Figure 9, it is possible to estimate the trend in both the Bi-LSTM network and SARIMA prediction for the discharge current that occurs periodically in the eclipse section. However, the SARIMA model cannot accurately estimate the discharges that are not periodic and that cannot be specified, such as mission performance and posture changes In addition, although the charging current has a physical characteristic that varies with the discharge current, SARIMA has a prediction error with a large amount of charge current regardless of the discharge current.
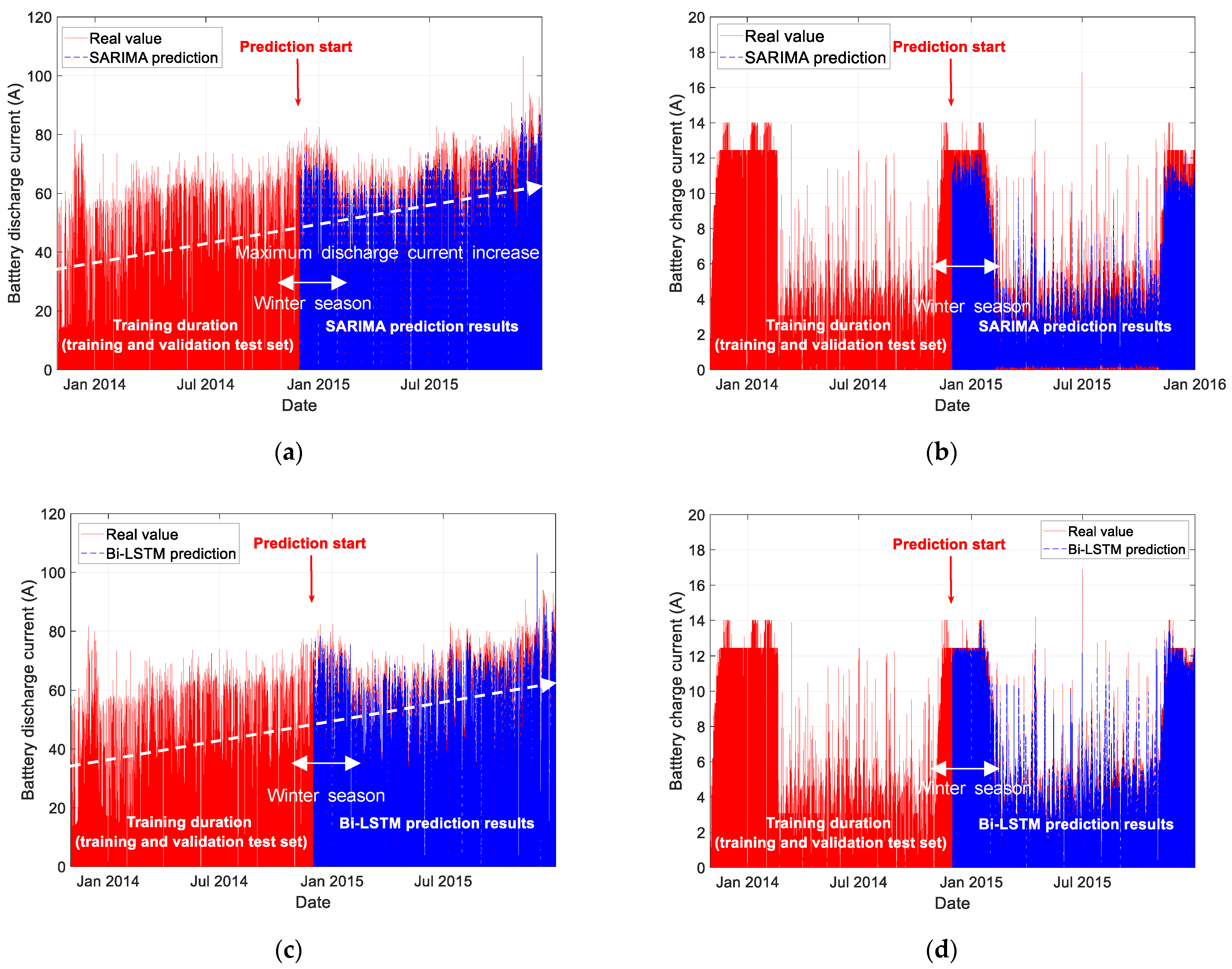
Figure 10 shows the actual battery current of the KOMPSAT-5 satellite, as well as the Bi-LSTM network and SARIMA prediction results. Similar to the KOMPSAT-3A results, the red solid line represents the actual value and the blue dashed line depicts the predicted value. Similarly to the KOMPSAT-3A battery current prediction, data for one year after launch are used for learning and verification. Data from one year to two years after launch are used for prediction performance analysis, and the prediction period is selected as 12 h.
The KOMPSAT-5 satellite has an eclipse duration only in the winter season, which causes an extreme change in the charge and discharge current profile according to the season. Unlike KOMPSAT-3A, where periodic eclipses occur in all seasons, a large discharge occurs in the winter season. Furthermore, in the case of the charging current, as shown in
Figure 10b,d, the winter section has a higher value than other seasons. Moreover, as shown in the figure, unlike KOMPSAT-3A, it is evident that the maximum discharge current gradually increases according to the operating period of two years.
As for Bi-LSTM estimation, the change in maximum discharge and charge current for the seasonal and operating period is similarly estimated. However, SARIMA cannot estimate the discharge current according to the mission at the correct time. Thus, an error occurs in the maximum discharge and charge current. As shown in
Figure 10b,d, the charge current in the winter section is predicted to have a higher value in both SARIMA and Bi-LSTM, whereas the Bi-LSTM prediction shows a consistent and superior performance than the SARIMA.
Figure 11 shows an enlarged discharge and charge current prediction results of the KOMPSAT-5 satellite, including the mission duration of 7 January 2015. In the winter section, periodic discharge occurs due to the eclipse, and the maximum discharge current appears due to the mission operation. As shown in
Figure 11a, for Bi-LSTM estimation, it is possible to predict the discharge current during the non-periodic mission operation in a short time. On the other hand, with SARIMA prediction, such aperiodic discharge current prediction is not accurate, and the discharge current generated during the eclipse shows a large error compared to that of the Bi-LSTM estimation.
As for charging current prediction, charging is performed in the solar section after the eclipse section has passed. Although there is a difference in accuracy, both the SARIMA model and the Bi-LSTM model predicted the shape of the waveform in which the charging current decreased according to the battery SOC. However, as found in
Figure 10b, the charge current fluctuated due to the discharge current that occurred during a short period in the mission performance section, and only the Bi-LSTM model predicts this change. Thus, with Bi-LSTM model, if the maximum discharge period is estimated during the mission, the charging current is predicted utilizing the causal relationship. However, with SARIMA model, the estimation performance is poor due to the mission operation and attitude change. Therefore, through the enlarged picture, it is confirmed that the Bi-LSTM model is excellent in predicting the maximum charging and discharging current values and the predicted reproduction of the waveform.
To numerically analyze the performance of the estimation results reported in this study, we use the RMSE, MAPE, and correlation coefficient, as shown in Equations (15)–(17). The performances of the KOMPSAT-3A and KOMPSAT-5 satellite charge and discharge current simulators are examined through three indicators.
where
n is the number of test data,
is the actual data,
is the predicted data of each model,
is the mean of the
, and
is the mean of the
The performance is verified by classifying it into the charging and discharging duration of each satellite since the pattern repeats.
Table 2 shows the seasonal performance analysis results for the battery discharge and charging current in a 12 h ahead of forecasting. As mentioned in
Section 3, the prediction results for 12 h ago are analyzed considering the ground contact period of KOMPSAT-3A,5 satellites. For KOMPSAT-3A satellite, discharging and charging are performed as the eclipse duration and attitude maneuvers occur periodically. Thus, the error difference between the RMSE and MAPE of the Bi-LSTM and SARIMA is relatively small compared to that of the KOMPSAT-5 satellite. In addition, because the charge current does not change significantly with the KOMPSAT-3A satellite, there is no significant variation in the error of one year with the SARIMA model. Correlation coefficient analysis results also show that similar to RMSE and MAPE, the Bi-LSTM-based estimation results for one year are more accurate to the actual ones. For the KOMPSAT-3A satellite, the Bi-LSTM outperforms in all seasons compared with the SARIMA model, and even in the summer section where the maximum discharge current occurs.
In the prediction comparison for KOMPSAT-5 satellite, the SARIMA estimates seasonal fluctuations; however, the maximum charge and discharge current prediction error is larger than that of the Bi-LSTM model. In addition, with the SARIMA model, a more accurate estimation can be made in winter, when periodic expression intervals occur, but it is observed that larger prediction errors occur in the remaining seasons. This is because, under the assumption that the current trend would continue into the future, it does not reflect the aperiodic externalities caused by SARIMA’s limitations in predicting the future mission performance and posture change. On the contrary, with the Bi-LSTM model, it is demonstrated through the RMSE analysis result that it shows a low error than the SARIMA model in all four seasons because it could include all external variables. In addition, the similarity between the actual value and the predicted value is observed with the MAPE and correlation coefficient analysis that the Bi-LSTM prediction is superior to the SARIMA prediction.
5. Conclusions
LEO satellites have limitations in continuous status monitoring due to access restrictions in the orbit. Therefore, the development of a simulator for predicting satellite events has been undertaken. However, it is difficult to predict the state of satellites in general, because of their environmental characteristics. In particular, the power system is difficult to model mathematically because it fluctuates depending on the environment and operating conditions, such as the operating period, orbit, operating plan, and season.
In this paper, we have proposed and comparatively analyzed a technique to predict the charge and discharge current of a LEO satellite battery, which is the most important information for mission- and power-related analysis and simulator development among power systems. To confirm the validity of the proposed data-based learning technique, the on-orbit charging and discharging current prediction errors have been compared, for which training has been performed with data from one year and an evaluation has been conducted using data from the subsequent year. The performance has been demonstrated an accurate and reliable performance with real satellite data.
It is expected that data-based prediction in this study of the charging and discharging current of the satellite enables the development of a LEO satellite power simulator. Moreover, it will facilitate the development of guidelines for satellite battery management. In addition, it is anticipated that the energy balance analysis of the satellite power system can be utilized by applying the charge and discharge current predictions in this study to multiple satellites.
In the future, we plan to expand the LEO satellite battery current prediction to conduct a study on the degradation prediction of satellite power consumption and the battery SOC estimation method.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}