
A Survey on Techniques in the Circular Formation of Multi-Agent Systems


Abstract
:1. Introduction
2. Formulation and Classification of the CFP
2.1. General Circular Formation Control Problem
2.2. Classification of the CFP
- Formation control with cycle/directed cycle: It is also referred to as CCM. It represents a circular formation with an unspecified center. In this case, the center of the circular formation is determined by the initial states of the agents.
- Formation control with cycle/directed cycle with an additional center node: It is often referred to as circumnavigation. It represents the circular formation with a given center. Circumnavigation or target-enclosing refers to encircling around a specific target by a single agent or group of agents.
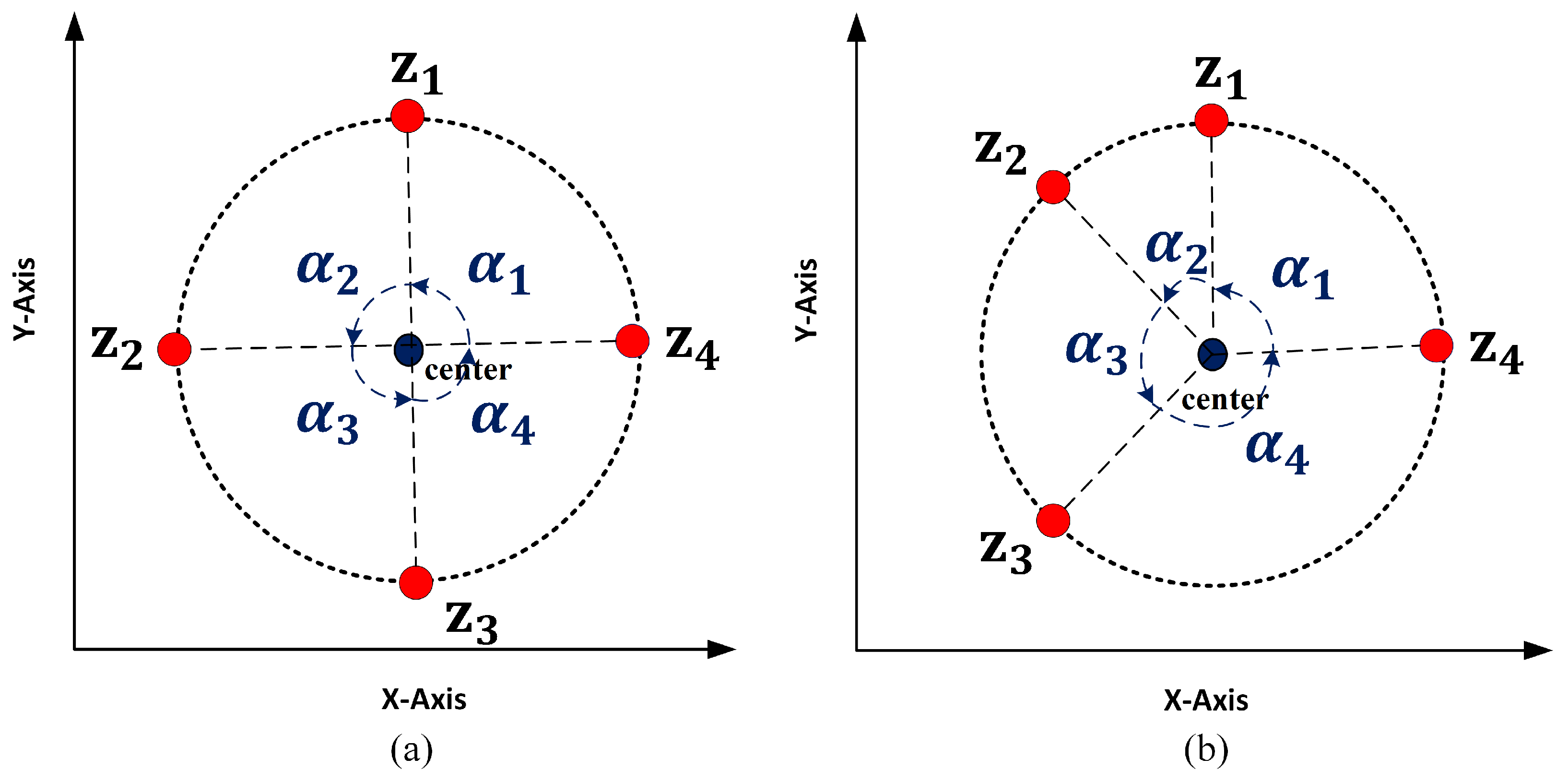
- Even distribution: The circular formation is achieved such that the agents are evenly distributed as shown in Figure 1a and equally spaced on the circumference of the circle, this problem has been addressed in [17,82]. A distributed control law for evenly spaced multiple mobile robots to achieve circular formation is proposed in [83]. Achieving even distribution in circular trajectory by autonomous mobile robots while enclosing a moving target is presented in [84]. A hybrid control law based on local information is designed for a group of unicycles to move in uniform collective motion around a target based on even distribution [85]. The even distributions describe many practical applications but it may not ensure the optimal configuration [68,79].
- Arbitrary distribution: Any arbitrary or desired distribution on a circular path is shown in Figure 1b. The circular formation is achieved such that the agents are arbitrarily distributed on the circle in [27,86]. Distributed control algorithms are designed first to lead a group of agents to move on a circular path while preserving their spatial order [39]. An extension based on sampled data and finite time control was proposed to make the problem more application-oriented [39]. The circular formation for multiple agents can be achieved with any preset phase distribution by combining the circular motion control and phase control in the two-dimensional space [87]. The static and dynamic circular formation control is studied in [77,88] for a heterogeneous multi-robot system with arbitrary spacing. Arbitrary distribution encourages the control design for collision avoidance as compared to even distribution. This makes arbitrary distribution-based CFP more application-oriented.
2.3. Categorical Measurements in a Circular Formation
2.3.1. Bearing Measurements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Definitions | Advantages | Disadvantages |
|---|---|---|---|
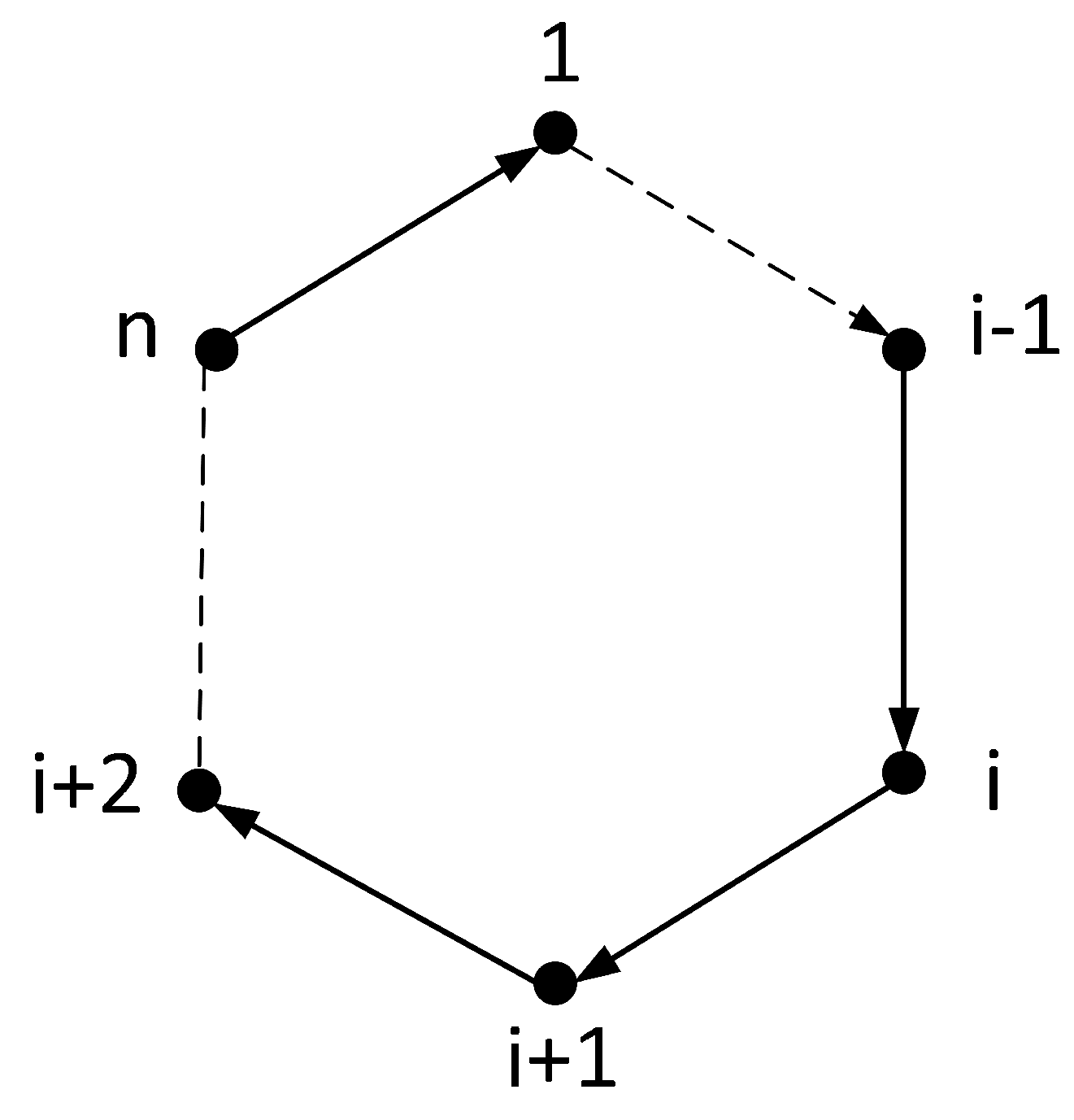
| Cyclic Pursuit Method [17,20,110,111,112,113] | • For n agents, each agent i follows its next agent modulo n. | • A distributed control method does not require a leader (pursuer) to achieve the formation that guarantees the anti-interference/anti-disturb performance. • It only necessitates relative measurement that includes only position and speed. Thus, it can reduce the communication interaction between the agents by using a minimum number of communication links to achieve the desired formation and retain the connectivity (n links for n agents). • It can keep the agent’s formation in collective uniform configuration and reorientation. • In this method, all agents converge toward one point (center). Thus, it ensures the capturability of the target. | • It introduces feedback paths, which makes stability analysis difficult. |
| Leader-follower Method [27,30,35,36,41,50,60,75,84,85,93,114] | • At least one agent is designated as the leader and the other agents are considered as followers. The follower agents track the leader such that no feedback exists from the follower agents to the leader. | • Intuitiveness, simplicity, and ease implementation of using decentralized approaches where every agent takes its own decision based on local information. • The desired formation can be specified in terms of the leader’s trajectory and it can still maintain even if the leader’s motion is subject to some disturbances. | • The leader’s agent is highly independent of the follower agents, i.e, lack of feedback from the follower agents to the leader agent. • Formation does not allow the leader’s faults. If the communication between the leader and followers is interrupted, it is difficult to maintain the formation. |
| Behavior-based Method [33,45,57,81,94,95,98,115] | • Multiple expected and desired behavior is prescribed for every agent such as collision avoidance, obstacle avoidance, formation reconfiguration, target tracking, etc. | • Decentralized control method where the group dynamics incorporates the formation feedback through neighbors-based communication. • High adaptability to systems with multiple interactions, particularly for large-scale robots. | • The overall behavior cannot be explicitly defined and the mathematical analysis of this method is difficult. Thus, the convergence to the desired configuration cannot be assured. |
| Artificial Potential Method [21,63,64,89,90,116,117,118] | • This method constitutes attractive and repulsive forces, which generate the potential function. | • The simplicity and robustness of real-time control make it suitable for real-time applications and good performance in dynamic environments. • Distributed control strategy that is applicable for controlling large systems/groups of robots. • The agents are capable of dealing with different desired/expected tasks. • Improve scalability of agents formations, obstacle/collision avoidance, and reconfiguration. | • Producing the local minima problem in which the agent is trapped before achieving the desired goal. • Difficult to design the local basic behavior and control of the desired formation. |
| Virtual Structure Method [61,96,97,119,120] | • The formation of the agents is treated as a rigid body structure based on a virtual reference point or virtual leader. | • This approach can easily specify the coordinated behavior for the group without an explicit leader, and that the desired formation can be highly maintained during the maneuvers. • It does not rely on a single real unit which makes it highly robust than the leader–follower approach. • It has a simple formation definition since the agent follows the center of the body instead of another agent. | • It is a centralized method where the central control unit manages the formation keeping. Thus, it increases time consumption due to the computational prediction of the system in finite time. |
2.3.2. Range Measurements
3. CFP Methods
3.1. Circular Formation Based Cyclic Pursuit Strategy
3.2. Target Tracking Circular Formation Control
3.2.1. Fixed Target Tracking
3.2.2. Moving Target Tracking
3.2.3. Tracking of Multiple Targets
3.3. Behavior-Based Circular Formation Control
3.4. Circular Formation Using the Artificial Potential Functions
3.5. Virtual-Structure-Based Circular Formation Control
4. Collective Circular Motion Stabilization
4.1. CCM with Identical Linear Velocity
4.2. CCM with Nonidentical Linear Velocity
5. Event-Triggered Circle Formation Control
6. Circular Formation Control with Constraints
6.1. CFP with Actuator Saturation
6.2. CFP with Actuator Fault
6.3. CFP with Disturbances
6.4. CFP with Communication Constraint
6.5. CFP with Locomotion Constraint
6.6. CFP with Velocity Constraint
6.7. CFP with a Finite Time Control
7. Source Seeking via Circular Formation
- Stabilization of the circular formation;
- Estimation of the gradient;
- Steering the circular formation with dynamic center toward the source for n agents.
8. Applications of Circular Formation
9. Future Research Directions
- Many results in CFP consider the single-integrator model; therefore, it is a practical requirement to address more complex and realistic MAS models such as models that capture real UAV systems with dynamic uncertainties and noisy environments.
- Although the existence of several extensive research papers, CFP investigations mainly focus on identical (Homogenous) MAS; however, in some practical applications such as reconnaissance missions carried out by UAVs and UGVs, it is difficult to consider that all the agents have the same dynamics. Thus, more research effort on circular formation control of heterogeneous MASs will be needed.
- For real-time circular formation, practical issues, such as connectivity preservation, obstacle avoidance, and collision avoidance, have been less studied in the circular formation of MAS. How to implement the rotational control input and design novel control strategies to ensure collision avoidance and obstacle avoidance among agents is a challenging research topic.
- The design of novel control strategies to address more practical and realistic scenarios such as CFP of MAS with switching communication topologies, unreliable links, and time-varying delays needs further investigation. Moreover, most of the existing research results on circular formation have focused on MAS in the plane, and the study cannot be directly extended to 3D space. Thus, the CFP of MAS in 3D space needs to be studied.
- To the best of the author’s knowledge, there are only a few results in CFP with constraints, and most existing results consider only holonomic robots initially located in the circular trajectory; however, it is necessary to study the case where the agents are randomly deployed in the plane.
- Instead of wireless communication, the design of control law with only onboard sensors for example image processing is an open future research paradigm. Furthermore, the implementation of existing results of the CFP on a real multi-robot test to verify the theoretical achieved results needs to be addressed.
- In some practical formation flights, it is a requirement to achieve circumnavigation and localization in different circular orbits around targets; however, the existing results on the CFP of MASs have focused on circumnavigating targets in the same radii/orbit. How to design novel control strategies to achieve the circular formation tracking of targets in different circular radii/orbits is an open research problem that needs further investigation.
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CFP | Circular Formation Problem |
| CCM | Collective Circular Motion |
| MAS | Multi Agent System |
| CCFP | Centralized Circular Formation Problem |
| DCFP | Decentralized Circular Formation Problem |
| RSS | Received Signal Strength |
| HDTA | Hybrid Dynamic Task Allocation |
| LGVF | Lyapunov Guidance Vector Field |
| BLF | Barrier Lyapunov Function |
| BFGS | Broyden Fletcher Goldfarb Shanno |
| LM | Levenberg–Marquardt |
| ETC | Event Triggered Control |
| CCN | Cooperative Circumnavigation |
| LQT | Linear Quadratic Tracking |
| UAV | Unmanned Aerial Vehicle |
| UGV | Unmanned Ground Vehicle |
| AUV | Autonomous Underwater Vehicle |
| ASV | Autonomous Surface Vehicle |
Appendix A
References
- Burdakov, O.; Doherty, P.; Holmberg, K.; Kvarnström, J.; Olsson, P.M. Relay positioning for unmanned aerial vehicle surveillance. Int. J. Robot. Res. 2010, 29, 1069–1087. [Google Scholar] [CrossRef] [Green Version]
- Hu, J. Energy-based multiple target localization and pursuit in mobile sensor networks. IEEE Trans. Instrum. Meas. 2012, 61, 212–220. [Google Scholar] [CrossRef]
- Dunbabin, M.; Marques, L. Robots for environmental monitoring: Significant advancements and applications. IEEE Robot. Autom. Mag. 2012, 19, 24–39. [Google Scholar] [CrossRef]
- Chung, T.H.; Hollinger, G.A.; Isler, V. Search and pursuit-evasion in mobile robotics: A survey. Auton. Robots 2011, 31, 299–316. [Google Scholar] [CrossRef] [Green Version]
- Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods in Multiagent Networks; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems. Proc. IEEE 2007, 95, 215–233. [Google Scholar] [CrossRef] [Green Version]
- Guoqing, Q.; Yinya, L.; Andong, S.; Xinying, G. An Investigation on Observer Minimum Circumnavigation Velocity for Bearings-Only Target Tracking. IEEE Access 2020, 8, 126805–126813. [Google Scholar] [CrossRef]
- Daingade, S.; Sinha, A. Target centric cyclic pursuit using bearing angle measurements only. IFAC Proc. Vol. 2014, 47, 491–496. [Google Scholar] [CrossRef] [Green Version]
- Sivrikaya, F.; Yener, B. Time synchronization in sensor networks: A survey. IEEE Netw. 2004, 18, 45–50. [Google Scholar] [CrossRef]
- Baldwin, J.L. Optimal Control of a Circular Satellite Formation Subject to Gravitational Perturbations; Department of Aeronautics and Astronautics, Air Force Institute of Technology, Wright-Patterson AFB: Greene County, OH, USA, 2007. [Google Scholar]
- Beard, R.W.; Lawton, J.; Hadaeghm, F.Y. A coordination architecture for spacecraft formation control. IEEE Trans. Control Syst. Technol. 2001, 9, 777–790. [Google Scholar] [CrossRef] [Green Version]
- Oh, K.K.; Park, M.C.; Ahn, H.S. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Yang, Z.; Zhu, S.; Chen, C.; Feng, G.; Guan, X. Entrapping a target in an arbitrarily shaped orbit by a single robot using bearing measurements. Automatica 2020, 113, 108805. [Google Scholar] [CrossRef]
- Girard, A.R.; Howell, A.S.; Hedrick, J.K. Border patrol and surveillance missions using multiple unmanned air vehicles. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; pp. 620–625. [Google Scholar]
- Liu, Y.; Liu, Z.; Shi, J.; Wu, G.; Chen, C. Optimization of Base Location and Patrol Routes for Unmanned Aerial Vehicles in Border Intelligence, Surveillance, and Reconnaissance. J. Adv. Transp. 2019, 2019, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Ogren, P.; Fiorelli, E.; Leonard, N.E. Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment. IEEE Trans. Autom. Control 2004, 49, 1292–1302. [Google Scholar] [CrossRef] [Green Version]
- Marshall, J.; Broucke, M.; Francis, B. Formations of vehicles in cyclic pursuit. IEEE Trans. Autom. Control 2004, 49, 1963–1974. [Google Scholar] [CrossRef]
- El-Hawwary, M.I.; Maggiore, M. Distributed circular formation stabilization for dynamic unicycles. IEEE Trans. Autom. Control 2013, 58, 149–162. [Google Scholar] [CrossRef]
- Sepulchre, R.; Paley, D.A.; Leonard, N.E. Stabilization of planar collective motion with limited communication. IEEE Trans. Autom. Control 2008, 53, 706–719. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Liu, L. Distributed circular formation control of ring-networked nonholonomic vehicles. Automatica 2016, 68, 92–99. [Google Scholar] [CrossRef]
- Zheng, R.H.; Lin, Z.Y.; Fu, M.Y.; Sun, D. Distributed control for uniform circumnavigation of ring-coupled unicycles. Automatica 2015, 53, 23–29. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, H.T. No-beacon collective circular motion of jointly connected multi-agents. Automatica 2011, 47, 1929–1937. [Google Scholar] [CrossRef]
- Seyboth, G.S.; Wu, J.; Qin, J.; Yu, C.; Allgower, F. Collective circular motion of unicycle type vehicles with nonidentical constant velocities. IEEE Trans. Control Netw. Syst. 2014, 1, 167–176. [Google Scholar] [CrossRef]
- Leonard, N.E.; Paley, D.; Lekien, F.; Sepulchre, R.; Frantatoni, D.; Davis, R. Collective motion, sensor networks and ocean sampling. Proc. IEEE 2007, 95, 48–74. [Google Scholar] [CrossRef] [Green Version]
- Beard, R.; McLain, T.; Goodrich, M.; Anderson, E. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Trans. Robot. Autom. 2002, 18, 911–922. [Google Scholar] [CrossRef] [Green Version]
- Kumar, R.; Sawhney, H.; Samarasekera, S.; Hsu, S.; Tao, H.; Guo, Y.; Hanna, K.; Pope, A.; Wildes, R.; Hirvonen, D.; et al. Aerial video surveillance and exploitation. Proc. IEEE 2001, 89, 1518–1539. [Google Scholar] [CrossRef]
- Wang, C.; Xie, G. Limit-Cycle-Based Decoupled Design of Circle Formation Control with Collision Avoidance for Anonymous Agents in a Plane. IEEE Trans. Autom. Control 2017, 62, 6560–6567. [Google Scholar] [CrossRef]
- Dou, L.; Yu, X.; Liu, L.; Wang, X.; Feng, G. Moving-Target Enclosing Control for Mobile Agents with Collision Avoidance. IEEE Control Netw. Syst. 2021. [Google Scholar] [CrossRef]
- Shi, Y.J.; Li, R.; Teo, K.L. Cooperative enclosing control for multiple moving targets by a group of agents. Int. J. Control 2015, 88, 80–89. [Google Scholar] [CrossRef]
- Wang, C.; Xia, W.; Sun, J.; Fan, R.; Xie, G. General formation control for multi-agent systems with double-integrator dynamics. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 918–923. [Google Scholar]
- Wang, C.; Xie, G.; Wang, L.; Cao, M. Circle formation for anonymous mobile agents with double-integrator dynamics. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 7320–7325. [Google Scholar]
- Wang, Y.; Shen, T.; Song, C.; Zhang, Y. Circle formation control of second-order multi-agent systems with bounded measurement errors. Neurocomputing 2020, 397, 160–167. [Google Scholar] [CrossRef]
- Sepulchre, R.; Paley, D.; Leonard, N.E. Stabilization of planar collective motion: All-to-allcommunication. IEEE Trans. Autom. Control 2007, 52, 811–824. [Google Scholar] [CrossRef] [Green Version]
- Zheng, R.; Lin, Z.; Yan, G. Ring-coupled unicycles: Boundedness, convergence, and control. Automatica 2009, 45, 2699–2706. [Google Scholar] [CrossRef]
- Yu, X.; Xu, X.; Liu, L.; Feng, G. Circular formation of networked dynamic unicycles by a distributed dynamic control law. Automatica 2018, 89, 1–7. [Google Scholar] [CrossRef]
- Zheng, R.; Liu, Y.; Sun, D. Enclosing a target by nonholonomic mobile robots with bearing-only measurements. Automatica 2015, 53, 400–407. [Google Scholar] [CrossRef]
- Briñón-Arranz, L.; Seuret, A.; Pascoal, A. Circular formation control for cooperative target tracking with limited information. J. Franklin Inst. 2019, 356, 1771–1788. [Google Scholar] [CrossRef]
- Bishop, A.; Fidan, B.; Anderson, B.D.; Doğancay, K.; Pathirana, P. Optimality analysis of sensor-target localization geometries. Automatica 2010, 46, 479–492. [Google Scholar] [CrossRef]
- Wang, C.; Xie, G.; Cao, M. Forming circle formations of anonymous mobile agents with order preservation. IEEE Trans. Autom. Control 2013, 58, 3248–3254. [Google Scholar] [CrossRef]
- Wang, C.; Xie, G.; Cao, M. Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle. Automatica 2014, 50, 1100–1108. [Google Scholar] [CrossRef]
- Sen, A.; Sahoo, S.R.; Kothari, M. Circumnavigation on Multiple Circles Around a Nonstationary Target with Desired Angular Spacing. IEEE Trans. Cybern. 2021, 51, 222–232. [Google Scholar] [CrossRef]
- Jain, A.; Ghose, D. Collective circular motion in synchronized and balanced formations with second-order rotational dynamics. Commun. Nonlinear Sci. Numer. Simul. 2018, 54, 156–173. [Google Scholar] [CrossRef]
- Qin, J.; Wang, S.; Kang, Y.; Liu, Q. Circular Formation Algorithms for Multiple Nonholonomic Mobile Robots: An Optimization-Based Approach. IEEE Trans. Ind. Electron. 2019, 66, 3693–3701. [Google Scholar] [CrossRef]
- Moshtagh, N.; Michael, N.; Jadbabaie, A.; Daniilidis, K. Distributed bearing-only control laws for circular formations of ground robots. In Proceedings of the 2008 Robotics: Science and Systems Conference, Zurich, Switzerland, 25–28 June 2008. [Google Scholar]
- Moshtagh, N.; Michael, N.; Jadbabaie, A.; Daniilidis, K. Vision-Based, Distributed Control Laws for Motion Coordination of Nonholonomic Robots. IEEE Trans. Robot. 2009, 25, 851–860. [Google Scholar] [CrossRef] [Green Version]
- Jain, A.; Ghose, D. Stabilization of collective motion in synchronized, balanced and splay phase arrangements on a desired circle. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 731–736. [Google Scholar]
- Daingade, S.; Sinha, A. Fail-safe encircling of multiple unmanned aerial vehicles with bearing only measurements. Int. J. Micro Air Vehicles 2016, 8, 240–251. [Google Scholar] [CrossRef] [Green Version]
- Briñón-Arranz, L.; Seuret, A.; Canudas-de-Wit, C. Cooperative control design for time-varying formations of multi-agent systems. IEEE Trans. Autom. Control 2014, 59, 2283–2288. [Google Scholar] [CrossRef] [Green Version]
- Shames, I.; Dasgupta, S.; Fidan, B.; Anderson, B.D. Circumnavigation using distance measurements under slow drift. IEEE Trans. Autom. Control 2012, 57, 889–903. [Google Scholar] [CrossRef]
- Swartling, J.O.; Shames, I.; Johansson, K.H.; Dimarogonas, D.V. Collective circumnavigation. Unmanned Syst. 2014, 2, 219–229. [Google Scholar] [CrossRef]
- Jin, L.; Yu, S. Affine transformation-based no-beacon circular formation of agents. J. Eng. 2019, 2019, 599–604. [Google Scholar] [CrossRef]
- Sun, Z.; Marina, H.G.; Seyboth, G.S.; Anderson, B.D.; Yu, C. Circular Formation Control of Multiple Unicycle-Type Agents with Nonidentical Constant Speeds. IEEE Trans. Control Syst. Technol. 2019, 27, 192–205. [Google Scholar] [CrossRef]
- Jin, L.; Yu, S.; Ren, D. Bearing-angle-based circular formation control of unicycles with arbitrary phase allocation. J. Eng. 2019, 2019, 623–628. [Google Scholar] [CrossRef]
- Guo, J.; Yan, G.; Lin, Z. Balanced circular formation control based on gossip communication and angle of arrival information. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 6036–6041. [Google Scholar]
- Cao, Y. UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements. Automatica 2015, 55, 150–158. [Google Scholar] [CrossRef] [Green Version]
- Deghat, M.; Shames, I.; Anderson, B.D.; Yu, C. Localization and circumnavigation of a slowly moving target using bearing measurements. IEEE Trans. Automat. Control 2014, 59, 2182–2188. [Google Scholar] [CrossRef]
- Franchi, A.; Stegagno, P.; Oriolo, G. Decentralized multi-robot encirclement of a 3D target with guaranteed collision avoidance. Auton. Robots 2016, 40, 245–265. [Google Scholar] [CrossRef] [Green Version]
- Shao, J.; Tian, Y.-P. Multi-target localisation and circumnavigation by a multi-agent system with bearing measurements in 2D space. Int. J. Syst. Sci. 2018, 49, 15–26. [Google Scholar] [CrossRef]
- Briñón-Arranz, L.; Seuret, A.; Pascoal, A. Target tracking via a circular formation of unicycles. IFAC-PapersOnLine 2017, 50, 5782–5787. [Google Scholar] [CrossRef]
- Peng, X.; Guo, K.; Geng, Z. Moving Target Circular Formation Control of Multiple Non-holonomic Vehicles without Global Position Measurements. IEEE Trans. Robot. 2020, 67, 310–314. [Google Scholar] [CrossRef]
- Benzerrouk, A.; Adouane, L.; Martinet, P. Stable navigation in formation for a multi-robot system based on a constrained virtual structure. Robot. Auton. Syst. 2014, 62, 1806–1815. [Google Scholar] [CrossRef] [Green Version]
- Lawrence, D.A.; Frew, E.W.; Pisano, W.J. Lyapunov vector fields for autonomous unmanned aircraft flight control. J. Guid. Control Dynam. 2008, 31, 1220–1229. [Google Scholar] [CrossRef]
- Summers, T.H.; Akella, M.R.; Mears, M.J. Coordinated standoff tracking of moving targets: Control laws and information architectures. J. Guid. Control Dynam. 2009, 32, 56–69. [Google Scholar] [CrossRef]
- Goncalves, V.M.; Pimenta, L.C.; Maia, C.; Dutra, B.C.; Pereira, G.A. Vector fields for robot navigation along time-varying curves in n-dimensions. IEEE Trans. Robot. 2010, 26, 647–659. [Google Scholar] [CrossRef]
- Sinha, A.; Ghose, D. Generalization of Linear Cyclic Pursuit with Application to Rendezvous of Multiple Autonomous Agents. IEEE Trans. Autom. Control 2006, 51, 1819–1824. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Wang, Y. Cyclic Pursuit-Fuzzy PD Control Method for Multi-agent Formation Control in 3D Space. Int. J. Fuzzy Syst. 2020, 23, 1904–1913. [Google Scholar] [CrossRef]
- Juang, J.C. On the formation patterns under generalized cyclic pursuit. IEEE Trans. Autom. Control 2013, 58, 2401–2405. [Google Scholar] [CrossRef]
- Song, C.; Liu, L.; Feng, G.; Xu, S. Coverage control for heterogeneous mobile sensor networks on a circle. Automatica 2016, 63, 349–358. [Google Scholar] [CrossRef]
- Cheng, S.; Yuan, F. Circular formation control for multi-agent systems with input saturation. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 7084–7089. [Google Scholar]
- Song, H.; Xu, C.; Fan, Y. Circle formation control for anonymous mobile agents with constant disturbances. In Proceedings of the 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 365–370. [Google Scholar]
- Briñón-Arranz, L.; Schenato, L.; Seuret, A. Distributed source seeking via a circular formation of agents under communication Constraints. IEEE Trans. Control Syst. Technol. 2016, 3, 104–115. [Google Scholar] [CrossRef]
- Liu, Q.; Ye, M.; Sun, Z.; Qin, J.; Yu, C. Coverage control of unicycle agents under constant speed constraints. IFAC-PapersOnLine 2017, 50, 2471–2476. [Google Scholar] [CrossRef]
- Yu, M.; Wang, H.; Xie, G.; Jin, K. Event-triggered circle formation control for second-order-agent system. Neurocomputing 2017, 275, 462–469. [Google Scholar] [CrossRef]
- Wen, J.; Xu, P.; Wang, C.; Xie, G.; Gao, Y. Distributed event-triggered circle formation control for multi-agent systems with limited communication bandwidth. Neurocomputing 2019, 358, 211–221. [Google Scholar] [CrossRef]
- Zhao, L.J.; Ma, D. Circle formation control for multi-agent systems with a leader. Control Theory Technol. 2015, 13, 82–88. [Google Scholar] [CrossRef]
- El-Hawwary, M.I. Three-dimensional circular formations via set stabilization. Automatica 2015, 54, 374–381. [Google Scholar] [CrossRef]
- Yao, W.; Lu, H.; Zeng, Z.; Xiao, J.; Zheng, Z. Distributed Static and Dynamic Circumnavigation Control with Arbitrary Spacings for a Heterogeneous Multi-robot System. J. Intell. Robot. Syst. 2019, 94, 883–905. [Google Scholar] [CrossRef]
- Yao, W.; Lu, H.; Zeng, Z. Distributed Circumnavigation Control with Dynamic spacing for a Heterogeneous Multi-robot System. J. Intell. Robot. Syst. 2018, 11374, 374–386. [Google Scholar]
- Lu, H.; Yao, W.; Chen, L. Distributed Multi-robot Circumnavigation with Dynamic Spacing and Time Delay. J. Intell. Robot. Syst. 2019, 99, 65–182. [Google Scholar] [CrossRef]
- Yu, X.; Liu, L.; Feng, G. Distributed Circular Formation Control of Nonholonomic Vehicles without Direct Distance Measurements. IEEE Trans. Autom. Control 2018, 63, 2730–2737. [Google Scholar] [CrossRef]
- Ceccarelli, N.; Di Marco, M.; Garulli, A.; Giannitrapani, A. Collective circular motion of multi-vehicle systems. Automatica 2008, 44, 3025–3035. [Google Scholar] [CrossRef]
- Bullo, F.; Cortes, J.; Martinez, S. Distributed Control of Robotic Networks; Princeton University Press: Princeton, NJ, USA, 2009. [Google Scholar]
- Yu, X.; Liu, L.; Feng, G. Distributed circular formation control of multi-robot systems with directed communication topology. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 8014–8019. [Google Scholar]
- Guo, J.; Yan, G.; Lin, Z. Local control strategy for moving-target-enclosing under dynamically changing network topology. Syst. Control Lett. 2010, 59, 654–661. [Google Scholar] [CrossRef]
- Lan, Y.; Yan, G.; Lin, Z. Distributed control of cooperative target enclosing based on reachability and invariance analysis. Syst. Control Lett. 2010, 59, 381–389. [Google Scholar] [CrossRef]
- Wang, C.; Xie, G. Controlling anonymous mobile agents to form a circle formation in a plane without collision. In Proceedings of the IEEE 55th Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 2016; pp. 916–921. [Google Scholar]
- Jin, L.; Yu, S.; Ren, D. Circular Formation Control of Multiagent Systems with Any Preset Phase Arrangement. J. Control Sci. Eng. 2018, 2018, 9162358. [Google Scholar] [CrossRef] [Green Version]
- Yao, W.; Zeng, Z.; Wang, X.; Lu, H.; Zheng, Z. Distributed Encirclement Control with Arbitrary Spacing for Multiple Anonymous Mobile Robots. In Proceedings of the 2017 Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 8800–8805. [Google Scholar]
- Chen, H.; Chang, K.; Agate, C.S. UAV path planning with tangent-plus-lyapunov vector field guidance and obstacle avoidance. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 840–856. [Google Scholar] [CrossRef]
- Park, S. Guidance law for stand off tracking of a moving object. J. Guid. Control Dyn. 2017, 40, 2948–2955. [Google Scholar] [CrossRef]
- Hara, S.; Kim, T.H.; Hori, Y. Distributed formation control for target-enclosing operations based on a cyclic pursuit strategy. IFAC Proc. Vol. 2008, 41, 6602–6607. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.; Harab, S.; Hori, Y. Cooperative control of multi-agent dynamical systems in target-enclosing operations using cyclic pursuit strategy. Int. J. Control 2010, 83, 2040–2052. [Google Scholar] [CrossRef]
- Miao, Z.; Wang, Y.; Fierro, R. Cooperative circumnavigation of a moving target with multiple nonholonomic robots using backstepping design. Syst. Control Lett. 2017, 103, 58–65. [Google Scholar] [CrossRef]
- Hou, Y.; Allen, R. Behaviour-based Circle Formation Control Simulation for Cooperative UUVs. IFAC Proc. 2008, 41, 119–124. [Google Scholar] [CrossRef]
- Freitas, V.; Macau, E. Collision Avoidance Mechanism for Symmetric Circular Formations of Unitary Mass Autonomous Vehicles at Constant Speed. Math. Problems Eng. 2018, 2018, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Liu, H.H.T. Formation flight of multiple fixed-wing unmanned aerial vehicles. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 1614–1619. [Google Scholar]
- Rezaee, H.; Abdollahi, F. A Decentralized Cooperative Control Scheme with Obstacle Avoidance for a Team of Mobile Robots. IEEE Trans. Ind. Electron. 2014, 61, 347–354. [Google Scholar] [CrossRef]
- Zhong, H.; Wang, Y.; Miao, Z.; Tan, J.; Li, L.; Zhang, H.; Fierro, R. Circumnavigation of a Moving Target in 3D by Multi-agent Systems with Collision Avoidance: An Orthogonal Vector Fields-based Approach. Int. J. Control Autom. Syst. 2019, 17, 212–224. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Y.; Qi, G.; Sheng, A. Distributed finite-time control for coordinated circumnavigation with multiple non-holonomic robots. Nonlinear Dyn. 2019, 98, 573–588. [Google Scholar] [CrossRef]
- Eren, T. Formation shape control based on bearing rigidity. Int. J. Control 2012, 85, 1361–1379. [Google Scholar] [CrossRef]
- Zhao, S.; Zelazo, D. Translational and Scaling Formation Maneuver Control via a Bearing-Based Approach. IEEE Trans. Control Netw. Syst. 2017, 4, 429–438. [Google Scholar] [CrossRef] [Green Version]
- Deghat, M.; Shames, I.; Anderson, B.D.; Yu, C. Target localization and circumnavigation using bearing measurements in 2d. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010; pp. 334–339. [Google Scholar]
- Nardone, S.C.; Aidala, V.J. Observability criteria for bearings-only target motion analysis. IEEE Trans. Aerosp. Electron. Syst. 1981, 17, 162–166. [Google Scholar] [CrossRef]
- Li, Y.; Qi, G.; Sheng, A. Optimal deployment of vehicles with circular formation for bearings-only multi-target localization. Automatica 2019, 105, 347–355. [Google Scholar] [CrossRef]
- Zhao, S.; Zelazo, D. Bearing Rigidity Theory and Its Applications for Control and Estimation of Network Systems: Life Beyond Distance Rigidity. IEEE Control Syst. Mag. 2019, 39, 66–83. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Lin, F.; Peng, K.; Chen, B.M.; Lee, T.H. Distributed control of angle-constrained circular formations using bearing-only measurements. In Proceedings of the 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar]
- Cao, S.; Li, R.; Shi, Y.; Song, Y. A low-cost estimator for target localization and circumnavigation using bearing measurements. J. Franklin Inst. 2020, 357, 9654–9672. [Google Scholar] [CrossRef]
- Zhao, S.; Lin, F.; Peng, K.; Chen, B.M.; Lee, T.H. Distributed control of angle-constrained cyclic formations using bearing-only measurements. Syst. Control Lett. 2014, 63, 12–24. [Google Scholar] [CrossRef]
- Van Tran, Q.; Trinh, M.H.; Ahn, H.S. Surrounding formation of star frameworks using bearing-only measurements. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 368–373. [Google Scholar]
- Marshall, J.A.; Broucke, M.E.; Francis, B.A. Pursuit formations of unicycles. Automatica 2006, 42, 3–12. [Google Scholar] [CrossRef]
- Lin, Z.; Broucke, M.E.; Francis, B.A. Local control strategies for groups of mobile autonomous agents. IEEE Trans. Autom. Control 2004, 49, 622–629. [Google Scholar] [CrossRef] [Green Version]
- Ramirez, J.L.; Pavone, M.; Frazzoli, E.; Miller, D.W. Distributed control of spacecraft formations via cyclic pursuit: Theory and experiments. J. Guid. Control Dyn. 2010, 33, 1655–1669. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Y.; Zhang, H. The formation control of multi-agent systems on a circle. IEEE/CAA J. Autom. Sin. 2018, 5, 148–154. [Google Scholar] [CrossRef]
- Sen, A.; Sahoo, S.; Kothari, M. Cooperative Target-centric Formation Control without Relative Velocity Measurements under Heterogeneous Networks. J. Intell. Robot. Syst. 2017, 87, 683–698. [Google Scholar] [CrossRef]
- Ma, J.; Yao, W.; Dai, W.; Lu, H.; Xiao, J.; Zheng, Z. Cooperative Encirclement Control for a Group of Targets by Decentralized Robots with Collision Avoidance. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 6848–6853. [Google Scholar]
- Frew, E.W.; Lawrence, D.A.; Morris, S. Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields. J. Guid. Control Dynam. 2008, 31, 290–306. [Google Scholar] [CrossRef]
- Lageman, C.; Helmke, U. Critical Points of Potential Functions for Circular Formation Control. IFAC Proc. Vol. 2013, 46, 31–37. [Google Scholar] [CrossRef]
- Yoon, S.; Park, S.; Kim, Y. Circular motion guidance law for coordinated standoff tracking of a moving target. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2440–2462. [Google Scholar] [CrossRef]
- Kawakami, H.; Namerikawa, T. Virtual structure based target-enclosing strategies for nonholonomic agents. In Proceedings of the 2008 IEEE International Conference on Control Applications, San Antonio, TX, USA, 3–5 September 2008; pp. 1043–1048. [Google Scholar]
- Kawakami, H.; Namerikawa, T. Cooperative target-capturing strategy for multivehicle systems with dynamic network topology. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 635–640. [Google Scholar]
- Zhang, M.; Tian, P.; Chen, X. Unmanned aerial vehicle guidance law for ground target circumnavigation using range-based measurements. Int. J. Control Autom. Syst. 2017, 15, 2455–2460. [Google Scholar] [CrossRef]
- Cao, Y.; Muse, J.; Casbeer, D.; Kingston, D. Circumnavigation of an unknown target using UAVs with range and range rate measurements. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 3617–3622. [Google Scholar]
- Cao, Y. UAV circumnavigating an unknown target using range measurement and estimated range rate. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4581–4586. [Google Scholar]
- Zhang, M.; Lin, Y.; Hao, H.; Mei, J. Range-only control for cooperative target circumnavigation of unmanned aerial vehicles. Adv. Control. Appl. 2020, 2, e51. [Google Scholar] [CrossRef]
- Hashemi, A.; Cao, Y.; Casbeer, D.; Yin, G. UAV Circumnavigation Using Noisy Range-based Measurements without GPS Information. ASME J. Dyn. Syst. Meas. Control 2015, 137. [Google Scholar] [CrossRef]
- Mao, G.; Anderson, B.D.; Fidan, B. Path loss exponent estimation for wireless sensor network localization. Comput. Netw. 2007, 51, 2467–2483. [Google Scholar] [CrossRef]
- Godsil, C.; Royle, G. Algbraic Graph Theory; Springer: New York, NY, USA, 2001. [Google Scholar]
- Lin, Z.; Ding, W.; Yan, G.; Yu, C.; Giua, A. Leader-follower formation via complex laplacian. Automatica 2013, 49, 1900–1906. [Google Scholar] [CrossRef]
- Behroozi, F.; Gagnon, R. Cylcic pursuit in a plane. J. Math. Phys. 1979, 20, 2212–2216. [Google Scholar] [CrossRef]
- Bruckstein, A.M.; Cohen, N.; Efrat, A. Ants, Crickets and Frogs in Cyclic Pursuit; Technion-Israel Institute of Technology; Center for Intelligent Systems: Vaud, Switzerland, 1991. [Google Scholar]
- Klamkin, M.S.; Newman, D.J. Cyclic pursuit or The three bugs problem. Amer. Math. Month. 1971, 78, 631–639. [Google Scholar]
- Ma, L.; Hovakimyan, N. Vision-based cyclic pursuit for cooperative target tracking. J. Guid. Control Dynam. 2013, 36, 617–622. [Google Scholar] [CrossRef]
- Khachumov, M.V. Solution of the Problem of Group Pursuit of a Target Under Perturbations (Spatial Case). Sci. Tech. Inf. Proc. 2018, 45, 435–443. [Google Scholar] [CrossRef]
- Gurfil, P.; Mishne, D. Cyclic spacecraft formations: Relative motion control using line-of-sight measurements only. J. Guid. Control Dyn. 2007, 30, 214–226. [Google Scholar] [CrossRef]
- Iqbal, M.; Hung, P.D.; Leth, J.; Ngo, T.D. A variant of the cyclic pursuit scheme for consensus in multi-agent systems. In Proceedings of the 2016 International Conference on Advanced Technologies for Communications (ATC), Hanoi, Vietnam, 12–14 October 2016; pp. 462–467. [Google Scholar]
- Mukherjee, D.; Ghose, D. Generalization of deviated linear cyclic pursuit. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 6163–6168. [Google Scholar]
- Mukherjee, D.; Ghose, D. On Synchronous and Asynchronous Discrete Time Heterogeneous Cyclic Pursuit. IEEE Trans. Autom. Control 2017, 62, 5248–5253. [Google Scholar] [CrossRef]
- Sinha, A.; Ghose, D. Generalization of nonlinear cyclic pursuit. Automatica 2007, 43, 1954–1960. [Google Scholar] [CrossRef]
- Sharma, B.R.; Ramakrishnan, S.; Kumar, M. Cyclic pursuit in a multi-agent robotic system with double-integrator dynamics under linear interactions. Robotica 2013, 31, 1037–1050. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. Pursuit formation of double-integrator dynamics using consensus control approach. IEEE Trans. Ind. Electron. 2015, 62, 4249–4256. [Google Scholar] [CrossRef]
- Mallik, G.R.; Sinha, A. A study of balanced circular formation under deviated cyclic pursuit strategy. IFAC-PapersOnLine 2015, 48, 41–46. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. A cyclic pursuit framework for networked mobile agents based on vector field approach. J. Franklin Inst. 2019, 356, 1113–1130. [Google Scholar] [CrossRef]
- Yu, X.; Liu, L.; Feng, G. Coordinated control of multiple unicycles for escorting and patrolling task based on a cyclic pursuit strategy. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 7289–7294. [Google Scholar]
- Li, J.; Chen, X. Multi-AUV Circular Formation Sliding Mode Control Based on Cyclic Pursuit. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; pp. 1365–1370. [Google Scholar]
- Iudice, F.L.; Acosta, J.Á.; Garofalo, F.; DeLellis, P. Estimation and control of oscillators through short-range noisy proximity measurements. Automatica 2020, 113, 108752. [Google Scholar] [CrossRef] [Green Version]
- Iudice, F.L.; Garofalo, F.; De Lellis, P. Formation control on a closed curve under an intermittent measurement flow. IEEE Contr. Syst. Lett. 2021, 6, 656–661. [Google Scholar] [CrossRef]
- Lou, Y.C.; Hong, Y.G. Distributed surrounding design of target region with complex adjacency matrices. IEEE Trans. Autom. Control 2015, 60, 283–288. [Google Scholar] [CrossRef]
- Li, R.; Shi, Y.; Song, Y. Localization and circumnavigation of multiple agents along an unknown target based on bearing-only measurement: A three dimensional solution. Automatica 2018, 94, 18–25. [Google Scholar] [CrossRef]
- Zou, Y.; Wang, L.; Meng, Z. Distributed Localization and Circumnavigation Algorithms for a Multiagent System with Persistent and Intermittent Bearing Measurements. IEEE Trans. Control Syst. Technol. 2021, 29, 2092–2101. [Google Scholar] [CrossRef]
- Briñón-Arranz, L.; Seuret, A.; Canudas-de-Wit, C. Contraction control of a fleet circular formation of AUVs under limited communication range. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 5991–5996. [Google Scholar]
- Dong, Y.; Hu, X. Leader-following formation control problem of unicycles. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 8154–8159. [Google Scholar]
- Mallik, G.R.; Daingade, S.; Sinha, A. Scalable multi-agent formation with bearing only measurement: Consensus based approach. Eur. J. Control 2016, 27, 28–35. [Google Scholar] [CrossRef]
- Wang, L.; Zou, Y.; Meng, Z. Stationary target localization and circumnavigation by a non-holonomic differentially driven mobile robot: Algorithms and experiments. Int. J. Robust Nonlinear Control 2020, 31, 2061–2081. [Google Scholar] [CrossRef]
- Wang, J.; Ma, B.; Yan, K. Mobile Robot Circumnavigating an Unknown Target Using Only Range Rate Measurement. IEEE Trans. Circuits Syst. II Exp. Briefs 2021. [Google Scholar] [CrossRef]
- Kim, T.H.; Sugie, T. Cooperative control for target-capturing task based on a cyclic pursuit strategy. Automatica 2007, 43, 1426–1431. [Google Scholar] [CrossRef]
- Dou, L.; Song, C.; Wang, X.; Liu, L.; Feng, G. Target localization and enclosing control for networked mobile agents with bearing measurements. Automatica 2020, 118, 109022. [Google Scholar] [CrossRef]
- Ju, S.; Wang, J.; Dou, L. Enclosing Control for Multiagent Systems with a Moving Target of Unknown Bounded Velocity. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Liang, Y.; Jia, Y.; Du, J.; Matsuno, F. Cooperative bicircular target tracking using multiple unmanned aerial vehicles. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 982–987. [Google Scholar]
- Briñón-Arranz, L.; Seuret, A.; Canudas-de-Wit, C. Translation control of a fleet circular formation of AUVs under finite communication range. In Proceedings of the 48th IEEE Conference on Decision and Control held jointly with the 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 8345–8350. [Google Scholar]
- Lan, Y.; Lin, Z.; Cao, M.; Yan, G. A distributed reconfigurable control law for escorting and patrolling missions using teams of unicycles. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 5456–5461. [Google Scholar]
- Yu, X.; Liu, L. Cooperative Control for Moving-Target Circular Formation of Nonholonomic Vehicles. IEEE Trans. Autom. Control 2017, 62, 6560–6570. [Google Scholar] [CrossRef]
- Gao, S.; Li, Y.; Song, R. Cooperative multiple nonholonomic robots control for moving-target circular formation using backstepping design and tracking differentiator. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 7606–7611. [Google Scholar]
- Yu, X.; Ding, N.; Zhang, A.; Qian, H. Cooperative moving-target enclosing of networked vehicles with constant linear velocities. IEEE Trans. Cybern. 2020, 50, 798–809. [Google Scholar] [CrossRef]
- Fonseca, J.; Wei, J.; Johansen, T.A.; Johansson, K.H. Cooperative Circumnavigation for a Mobile Target Using Adaptive Estimation. Lect. Notes Electr. Eng. 2020, 695, 33–48. [Google Scholar]
- Parayil, A.; George, J. Distributed Tracking and Circumnavigation Using Bearing Measurements. In Proceedings of the ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020. [Google Scholar]
- Deghat, M.; Xia, L.; Anderson, B.D.; Hong, Y. Multi-target localization and circumnavigation by a single agent using bearing measurements. Int. J. Robust Nonlinear Control 2015, 25, 2362–2374. [Google Scholar] [CrossRef]
- Xia, L.; Deghat, M.; Anderson, B.D.; Hong, Y. Localization and circumnavigation of a group of targets by a single agent using bearing measurements. In Proceedings of the 2012 Australian Control Conference, Sydney, NSW, Australia, 15–16 November 2012; pp. 253–258. [Google Scholar]
- Matveev, A.S.; Semakova, A.A.; Savkin, A.V. Range-only based circumnavigation of a group of moving targets by a non-holonomic mobile robot. Automatica 2016, 65, 76–89. [Google Scholar] [CrossRef]
- Matveev, A.S.; Semakova, A.A. Range Only Based ThreeDimensional Circumnavigation of Multiple Moving Targets by a Nonholonomic Mobile Robot. IEEE Trans. Autom. Control 2018, 63, 2032–2045. [Google Scholar] [CrossRef]
- Cao, S.; Li, R.; Shi, Y.; Song, Y. Safe convex-circumnavigation of one agent around multiple targets using bearing-only measurements. Automatica 2021, 134, 109934. [Google Scholar] [CrossRef]
- Cui, L.; Chen, S.; Wang, L. Distributed control for multi- target circumnavigation by a group of agents. Int. J. Syst. Sci. 2017, 48, 2565–2574. [Google Scholar] [CrossRef]
- Han, L.; Dong, X.; Yi, K.; Tan, Q.; Li, Q.; Ren, Z. Circular formation tracking control for time-delayed second-order multi-agent systems with multiple leaders. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 2–14 August 2016; pp. 1648–1653. [Google Scholar]
- Chun, S.; Tian, Y. Multi-targets localization and elliptical circumnavigation by multi-agents using bearing-only measurements in two-dimensional space. Int. J. Robust Nonlinear Control 2020, 30, 3250–3268. [Google Scholar] [CrossRef]
- Chun, S. Bearing-Only-Based Formation Circumnavigation Guided by Multiple Unknown Targets. IEEE Access 2020, 8, 228377–228391. [Google Scholar] [CrossRef]
- Lawton, J.R.; Beard, R.W.; Young, B.J. A decentralized approach to formation maneuvers. IEEE Trans. Robot. Autom. 2003, 19, 933–941. [Google Scholar] [CrossRef] [Green Version]
- Wilhelm, J.P.; Clem, G.S.; Casbeer, D.W.; Gerlach, A.R. Circumnavigation and Obstacle Avoidance Guidance for UAVs Using Gradient Vector Fields. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar]
- Cao, Y.; Casbeer, D.; Milutinovicz, D.; Kingstonx, D. Collective circular motion and cooperative circumnavigation for nonholonomic mobile robots using range-based measurements. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016; pp. 1–14. [Google Scholar]
- Liu, Y.; Yu, H.; Shi, P.; Lim, C.C. Formation control and collision avoidance for a class of multi-agent systems. J. Franklin Inst. 2019, 356, 5395–5420. [Google Scholar] [CrossRef]
- Shames, I.; Fidan, B.; Anderson, B.D. Close target reconnaissance with guaranteed collision avoidance. Int. J. Robust Nonlinear Control 2011, 21, 1823–1840. [Google Scholar] [CrossRef]
- Matveev, A.; Wang, C.; Savkin, A. Real-time navigation of mobile robots in problems of border patrolling and avoiding collisions with moving and deforming obstacles. Rob. Auton. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Matveev, A.; Teimoori, H.; Savkin, A. A method for guidance and control of an autonomous vehicle in problems of border patrolling and obstacle avoidance. Automatica 2011, 47, 515–524. [Google Scholar] [CrossRef]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 500–505. [Google Scholar]
- Gazi, V.; Passino, K.M. Stability analysis of swarms. IEEE Trans. Autom. Control 2003, 48, 692–697. [Google Scholar] [CrossRef] [Green Version]
- Miao, Z.; Thakur, D.; Erwin, R.S.; Pierre, J.; Wang, Y.; Fierro, R. Orthogonal vector field-based control for a multi-robot system circumnavigating amoving target in 3D. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 6004–6009. [Google Scholar]
- Gao, S.; Song, R.; Li, Y. Cooperative Control of Multiple Nonholonomic Robots for Escorting and Patrolling Mission Based on Vector Field. IEEE Access 2018, 6, 41883–41891. [Google Scholar] [CrossRef]
- Rimon, E.; Koditschek, D. Exact robot navigation using artificial potential functions. IEEE Trans. Robot. Autom. 1992, 8, 501–518. [Google Scholar] [CrossRef] [Green Version]
- Ghaffarkhah, A.; Mostofi, Y. Communication aware target tracking using navigation functions centralized case. In Proceedings of the 2009 Second International Conference on Robot Communication and Coordination, IEEE, Odense, Denmark, 31 March–2 April 2009; pp. 1–8. [Google Scholar]
- Hong, J.; Kim, Y.; Bang, H. Cooperative circular pattern target tracking using navigation function. Aerosp. Sci. Technol. 2018, 76, 105–111. [Google Scholar] [CrossRef]
- Zheng, R.; Lin, Z.; Fu, M.; Sun, D. Distributed circumnavigation by unicycles with cyclic repelling strategies. In Proceedings of the 9th Asian Control Conference, Istanbul, Turkey, 23–26 June 2013; pp. 1–6. [Google Scholar]
- Jain, A.; Ghose, D. Trajectory-Constrained Collective Circular Motion with Different Phase Arrangements. IEEE Trans. Autom. Control 2019, 65, 2237–2244. [Google Scholar] [CrossRef]
- Muslimov, T.; Munasypov, R. Adaptive decentralized flocking control of multi-UAV circular formations based on vector fields and backstepping. ISA Trans. 2020, 107, 143–159. [Google Scholar] [CrossRef]
- Zhang, M.; Jia, J.; Mei, J. A composite system theory-based guidance law for cooperative target circumnavigation of UAVs. Aerosp. Sci. Technol. 2021, 118, 107034. [Google Scholar] [CrossRef]
- González-Sierra, J.; Flores-Montes, D.; Hernandez-Martinez, E.; Fernández-Anaya, G.; Paniagua-Contro, P. Robust circumnavigation of a heterogeneous multi-agent system. Auton. Robots 2021, 45, 265–281. [Google Scholar] [CrossRef]
- Do, K.D.; Pan, J. Nonlinear formation control of unicycle-type mobile robots. Robot. Auton. Syst. 2007, 55, 191–204. [Google Scholar] [CrossRef]
- Tan, K.H.; Lewis, M.A. Virtual structures for high-precision cooperative mobile robotic control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS ’96, Osaka, Japan, 8 November 1996; pp. 132–139. [Google Scholar]
- Ren, W.; Sorensen, N. Distributed coordination architecture for multi-robot formation control. Robot. Auton. Syst. 2008, 56, 324–333. [Google Scholar] [CrossRef]
- Askari, A.; Mortazavi, M.; Talebi, H.A. UAV formation control via the virtual structure approach. J. Aerosp. Eng. 2015, 28, 04014047. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, H.-T. A remark on collective circular motion of heterogeneous multi-agents. Automatica 2013, 49, 1236–1241. [Google Scholar] [CrossRef]
- Jeanne, J.; Leonard, N.E.; Paley, D. Collective Motion of Ring-Coupled Planar Particles. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 3929–3934. [Google Scholar]
- Chen, Z.; Iwasaki, T. Circulant synthesis of central pattern generators with application to control of rectifier systems. IEEE Trans. Autom. Control 2008, 53, 273–286. [Google Scholar] [CrossRef]
- Marshall, J.; Broucke, M.; Francis, B.A. A pursuit strategy for wheeled-vehicle formations. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 2555–2560. [Google Scholar]
- Mellish, R.; Napora, S.; Paley, D.A. Backstepping control design for motion coordination of self-propelled vehicles in a flowfield. Int. J. Robust Nonlinear Control 2011, 21, 1452–1466. [Google Scholar] [CrossRef] [Green Version]
- Napora, S.; Paley, D.A. Observer-based feedback control for stabilization of collective motion. IEEE Trans. Control Syst. Technol. 2013, 21, 1846–1857. [Google Scholar] [CrossRef] [Green Version]
- Dennis, J.E.; Schnabel, R.B. Numerical Methods for Unconstrained Optimization and Nonlinear Equations; Prentice-Hall: Englewood, NJ, USA, 1983. [Google Scholar]
- Wright, S.; Nocedal, J. Numerical Optimization; Springer: New York, NY, USA, 2006. [Google Scholar]
- Dimarogonas, D.; Frazzoli, E.; Johansson, K. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Wen, J.; Wang, C.; Xie, G. Asynchronous distributed event-triggered circle formation of multi-agent systems. Neurocomputing 2018, 295, 118–126. [Google Scholar] [CrossRef]
- Wang, H.; Yu, M.; Xie, G.; Shi, H. Event-triggered circle formation control of multi-agent systems. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 1321–1326. [Google Scholar]
- Yu, Y.; Zeng, Z.; Li, Z.; Wang, X.; Shen, L. Event-triggered encirclement control of multi-agent systems with bearing rigidity. Sci. China Inf. Sci. 2017, 60, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Xu, P.; Li, W.; Tao, J.; Dehmer, M.; Emmert-Streib, F.; Xie, G.; Xu, M.; Zhou, Q. Distributed Event-Triggered Circular Formation Control for Multiple Anonymous Mobile Robots with Order Preservation and Obstacle Avoidance. IEEE Access 2020, 8, 167288–167299. [Google Scholar] [CrossRef]
- Wen, J.; Zhang, H.; Tan, G.; Cai, N.; Xie, G. Distributed Event-Triggered Circle Formation Control for Multiagent Systems with Nonuniform Quantization. Complexity 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Peng, Z.; Jiang, Y.; Wang, J. Event-Triggered Dynamic Surface Control of an Underactuated Autonomous Surface Vehicle for Target Enclosing. IEEE Trans. Ind. Electron. 2021, 68, 3402–3412. [Google Scholar] [CrossRef]
- Wen, J.; Wang, C.; Xu, P.; Xie, G. Decentralized event-triggered circle formation control for multiagent systems via synchronous periodic event detection. Int. J. Robust Nonlinear Control 2019, 30, 910–925. [Google Scholar] [CrossRef]
- Kashyap, N.; Yang, C.W.; Sierla, S.; Flikkema, P.G. Automated fault location and isolation in distribution grids with distributed control and unreliable communication. IEEE Trans. Ind. Electron. 2015, 62, 2612–2619. [Google Scholar] [CrossRef]
- Hua, Y.; Dong, X.; Li, Q.; Ren, Z. Fault-tolerant time-varying formation tracking for second-order multi-agent systems with actuator faults and a non-cooperative target. IFAC-PapersOnLine 2018, 51, 68–73. [Google Scholar] [CrossRef]
- Dou, L.; Song, C.; Wang, X.; Liu, L.; Feng, G. Robust coverage control for networked mobile agents on a circle. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 2687–2692. [Google Scholar]
- Xu, B.; Meng, H.; Chen, D.; Zhang, H.T. Semi-global Leaderless Consensus of Circular Motion with Input Saturation. In Proceedings of the 11th International Conference, ICIRA 2018, Newcastle, NSW, Australia, 9–11 August 2018; pp. 27–38. [Google Scholar]
- Song, C.; Xu, H.; Fan, Y. Circular formation control of mobile agents with limited interaction range and input saturation. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 912–917. [Google Scholar]
- Yu, Y.; Wang, X.; Shen, L. Optimal UAV Circumnavigation Control with Input Saturation Based on Information Geometry. IFAC-PapersOnLine 2020, 53, 2471–2476. [Google Scholar] [CrossRef]
- Yu, X.; Liu, Z.; Zhang, Y. Fault-tolerant formation control of multiple UAVs in the presence of actuator faults. Int. J. Robust Nonlinear Control 2016, 26, 2668–2685. [Google Scholar] [CrossRef]
- Yu, X.; Ma, J.; Ding, N.; Zhang, A. Cooperative Target Enclosing Control of Multiple Mobile Robots Subject to Input Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2019. [Google Scholar] [CrossRef]
- Song, C.; Liu, L.; Xu, S. Circle Formation Control of Mobile Agents with Limited Interaction Range. IEEE Trans. Autom. Control 2019, 64, 2115–2121. [Google Scholar] [CrossRef]
- Song, C.; Fan, Y. Coverage control for mobile sensor networks with limited communication ranges on a circle. Automatica 2018, 92, 155–161. [Google Scholar] [CrossRef]
- Xu, P.; Wen, J.; Wang, C.; Xie, G. Distributed circle formation control over directed networks with communication constraints. IFAC-PapersOnLine 2019, 52, 108–113. [Google Scholar] [CrossRef]
- Dubins, L.E. On Curves of Minimal Length with a Constraint on Average Curvature, and with Prescribed Initial and Terminal Positions and Tangents. Amer. J. Math. 1957, 79, 497. [Google Scholar] [CrossRef]
- Wang, C.; Xie, G.; Wang, L.; Cao, M. CPG-based locomotion control of a robotic fish: Using linear oscillators and reducing control parameters via PSO. Int. J. Innov. Comput. Inf. Control 2011, 7, 4237–4249. [Google Scholar]
- Ren, W.; Beard, R.W. Trajectory tracking for unmanned air vehicles with velocity and heading rate constraints. IEEE Trans. Control Syst. Technol. 2004, 12, 706–716. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Y.; Qi, G.; Sheng, A. Coordinated circumnavigation by multiple agents under directed topology. Int. J. Syst. Sci. 2019, 50, 2616–2631. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Y.; Qi, G.; Sheng, A. Distributed finite-time control for coordinated circumnavigation with multiple agents under directed topology. J. Franklin Inst. 2020, 357, 11710–11729. [Google Scholar] [CrossRef]
- Wang, N.; Karimi, H.R.; Li, H.; Su, S. Accurate trajectory tracking of disturbed surface vehicles: A finite -time control approach. IEEE/ASME Trans. Mechatron. 2019, 24, 1064–1074. [Google Scholar] [CrossRef]
- Ma, D.; Sun, Y. Finite-time circle surrounding control for multi-agent systems. Int. J. Control Autom. Syst. 2017, 15, 1536–1543. [Google Scholar] [CrossRef]
- Dong, H.; Yang, X. Adaptive neural finite-time control for space circumnavigation mission with uncertain input constraints. J. Franklin Inst. 2021, 358, 3353–3375. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Mnif, F. Finite-time circular formation around a moving target with multiple underactuated ODIN vehicles. Math. Comput. Simul. 2021, 180, 230–250. [Google Scholar] [CrossRef]
- Li, W.; Farrell, J.; Pang, S.; Arrieta, R. Moth-inspired chemical plume tracing on an autonomous underwater vehicle. IEEE Trans. Robot. 2006, 22, 292–307. [Google Scholar] [CrossRef]
- Marques, L.; Nunes, U.; Almeida, A. Particle swarm-based olfactory guided search. Auton. Robots 2006, 20, 277–287. [Google Scholar] [CrossRef] [Green Version]
- Bachmayer, R.; Leonard, N.E. Vehicle networks for gradient descent in a sampled environment. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, NV, USA, 10–13 December 2002; pp. 112–117. [Google Scholar]
- Briñón-Arranz, L.; Schenato, L. Consensus-based source-seeking with a circular formation of agents. In Proceedings of the 2013 European Control Conference, Zurich, Switzerland, 17–19 July 2013; pp. 2831–2836. [Google Scholar]
- Azuma, S.; Sakar, M.S.; Pappas, G.J. Stochastic source seeking by mobile robots. IEEE Trans. Autom. Control 2012, 57, 2308–2321. [Google Scholar] [CrossRef] [Green Version]
- Briñón-Arranz, L.; Seuret, A.; Canudas-de-Wit, C. Collaborative estimation of gradient direction by a formation of AUVs under communication constraints. In Proceedings of the 50th IEEE Conference on Decision and Control, Orlando, FL, USA, 12–15 December 2011; pp. 5583–5588. [Google Scholar]
- Moore, B.J.; Canudas-de-Wit, C. Source seeking via collaborative measurements by a circular formation of agents. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 6417–6422. [Google Scholar]
- Cho, H.; Park, S.; Park, H.; Choi, K. Analytic Solution to Optimal Reconfigurations of Satellite Formation Flying in Circular Orbit under J2 Perturbation. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2180–2197. [Google Scholar] [CrossRef] [Green Version]
- Ovchinnikov, K.; Semakova, A.; Matveev, A. Cooperative surveillance of unknown environmental boundaries by multiple nonholonomic robots. Robot. Auton. Syst. 2015, 72, 164–180. [Google Scholar] [CrossRef]
- Sarıçiçek, İ.; Akkuş, Y. Unmanned Aerial Vehicle hub-location and routing for monitoring geographic borders. Appl. Math. Model. 2015, 39, 3939–3953. [Google Scholar] [CrossRef]
- Bein, D.; Bein, W.; Karki, A.; Madan, B.B. Optimizing Border Patrol Operations Using Unmanned Aerial Vehicles. In Proceedings of the 2015 12th International Conference on Information Technology-New Generations, Las Vegas, NV, USA, 13–15 April 2015; pp. 479–484. [Google Scholar]
- Sperandio Giacomin, P.A.; Hemerly, E.M. Reconfiguration Between Longitudinal and Circular Formations for Multi-UAV Systems by Using Segments. J. Intell. Robot. Syst. 2015, 78, 339–355. [Google Scholar] [CrossRef]
- Zakhar’Eva, A.; Matveev, A.S.; Hoy, M.C.; Savkin, A.V. Distributed control of multiple non-holonomic robots with sector vision and range-only measurements for target capturing with collision avoidance. Robotica 2015, 33, 385–412. [Google Scholar] [CrossRef]
- Asadi, H.; Oladazimi, M.; Asadi, Z.; Ambarwati, E. Pole placement controller for circular flying formation satellite system in the inverse square gravitation. In Proceedings of the 1st International Conference on Informatics and Computational Intelligence, ICI 2011, Bandung, Indonesia, 12–14 December 2011; pp. 197–202. [Google Scholar]
- Vassar, R.H.; Sherwood, R.B. Formation keeping for a Pair of Satellites in a Circular Orbit. J. Guid. Control. Dyn. 1985, 8, 235–242. [Google Scholar] [CrossRef]
- Bonin, G.; Roth, N.; Armitage, S.; Newman, J.; Risi, B.; Zee, R.E. CanX-4 and CanX-5 Precision Formation Flight: Mission Accomplished! In Proceedings of the 29th Annual AIAA/USA Conference on Small Satellites, Logan, UT, USA, 8–13 August 2015.
- Li, D.; Ma, G.; He, W.; Ge, S.S.; Lee, T.H. Cooperative Circumnavigation Control of Networked Microsatellites. IEEE Trans. Cybern. 2019, 50, 4550–4555. [Google Scholar] [CrossRef]
- Chris, S.; Rich, B.; Craig, A.M. Satellite formation flying design and evolution. J. Spacecr. Rockets 2001, 38, 270–278. [Google Scholar]
- Sadraey, M. Multi-vehicle circular formation flight in an unknown time-varying flow-field. In Proceedings of the 2013 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 28–31 May 2013; pp. 859–868. [Google Scholar]
- Chen, Y.; Yu, R.; Zhang, Y.; Liu, C. Circular Formation Flight Control for Unmanned Aerial Vehicles with Directed Network and External Disturbance. IEEE/CAA J. Autom. Sin. 2020, 7, 505–516. [Google Scholar] [CrossRef]
- Abas, M.F.; Pebrianti, D.; Azrad, S.; Iwakura, D.; Song, Y.; Nonami, K.; Fujiwara, D. Circular Leader-Follower Formation Control of Quad-Rotor Aerial Vehicles. J. Robot. Mechatronics 2013, 25, 60–71. [Google Scholar] [CrossRef]
- Li, D.; Cao, K.; Kong, L.; Yu, H. Fully Distributed Cooperative Circumnavigation of Networked Unmanned Aerial Vehicles. IEEE/ASME Trans. Mechatronics 2021, 26, 709–718. [Google Scholar] [CrossRef]
- Wang, R.; Xia, W.; Sun, X. Circular Formation Control of Car-like Robots with Local Position Measurements. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), PyeongChang, Korea, 17–20 October 2018; pp. 109–113. [Google Scholar]
- Zhang, H.; Chen, Z.; Yan, L.; Yu, W. Applications of Collective Circular Motion Control to Multirobot Systems. IEEE Trans. Control Syst. Technol. 2012, 21, 1416–1422. [Google Scholar] [CrossRef]
- Dong, H.; Yang, X.; Yu, X. Analysis of Nonlinearity and Dynamic Coupling in Fast Circumnavigation Missions. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 7365–7370. [Google Scholar]
- Tang, Z.; Özgüner, U. Motion planning for multitarget surveillance with mobile sensor agents. IEEE Trans. Robot. 2005, 21, 898–908. [Google Scholar] [CrossRef]
- Ghommam, J.; Fethalla, N.; Saad, M. Quadrotor circumnavigation of an unknown moving target using camera vision-based measurements. IET Control Theory Appl. 2016, 10, 1874–1887. [Google Scholar] [CrossRef]





| Notations | Definitions |
|---|---|
| The n-dimensional Euclidean space | |
| The set of positive real numbers | |
| The set of non-negative integers | |
| The set of complex numbers | |
| The transpose of A | |
| The Euclidean norm | |
| I | identity matrix |
| if otherwise | |
| The scalar product of for | |
| Class | | f is Lipschitz continuous and otherwise |
| A weighted digraph where represents a set of vertices, represents the set of edges, and is the weighted adjacency matrix, for an edge , i denotes an in-neighbor of j and j denotes an out-neighbor of i | |
| The out-neighbors set for given node j |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Litimein, H.; Huang, Z.-Y.; Hamza, A. A Survey on Techniques in the Circular Formation of Multi-Agent Systems. Electronics 2021, 10, 2959. https://doi.org/10.3390/electronics10232959
Litimein H, Huang Z-Y, Hamza A. A Survey on Techniques in the Circular Formation of Multi-Agent Systems. Electronics. 2021; 10(23):2959. https://doi.org/10.3390/electronics10232959
Chicago/Turabian StyleLitimein, Hamida, Zhen-You Huang, and Ameer Hamza. 2021. "A Survey on Techniques in the Circular Formation of Multi-Agent Systems" Electronics 10, no. 23: 2959. https://doi.org/10.3390/electronics10232959
APA StyleLitimein, H., Huang, Z.-Y., & Hamza, A. (2021). A Survey on Techniques in the Circular Formation of Multi-Agent Systems. Electronics, 10(23), 2959. https://doi.org/10.3390/electronics10232959