
Intelligent Cyber-Security System for IoT-Aided Drones Using Voting Classifier

 , and
, and 
Abstract
:1. Introduction
- A layered framework is designed to provide security and privacy in the small drone’s network;
- We highlight the design details of the proposed framework, implementation, hardware components, and attack handling methods using ML models;
- The proposed framework utilizes IoT-based sensor data, drone data, and network information to handle security attacks and achieves 99.99% accuracy;
- The experimental results prove the generalizability and robustness of the proposed LRRF model, which is tested on two benchmark datasets—KDD CUP 99 and NSL-KDD.
2. Related Work
2.1. Security Threats to Drones
2.2. Machine Learning for Drone Security
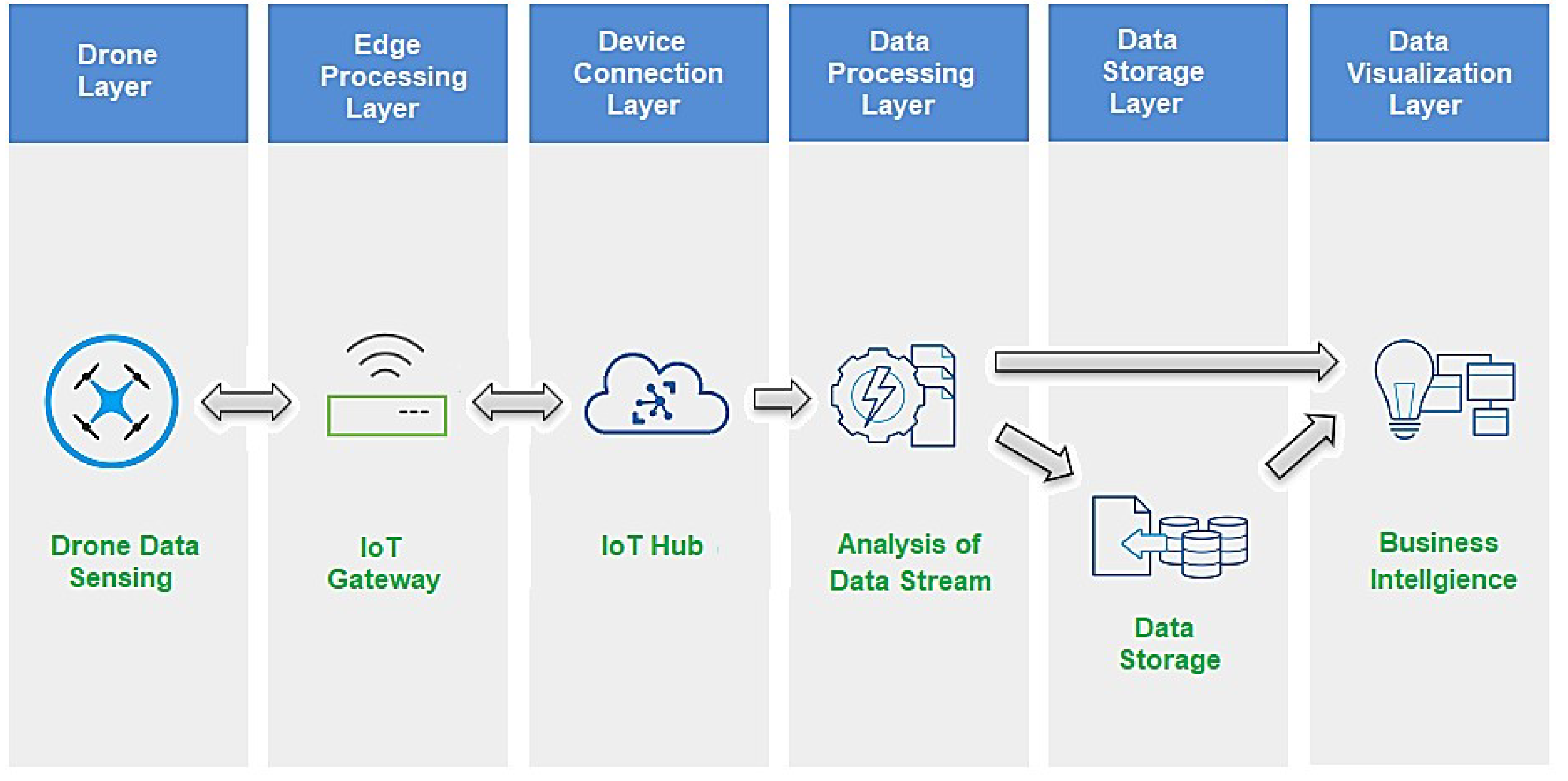
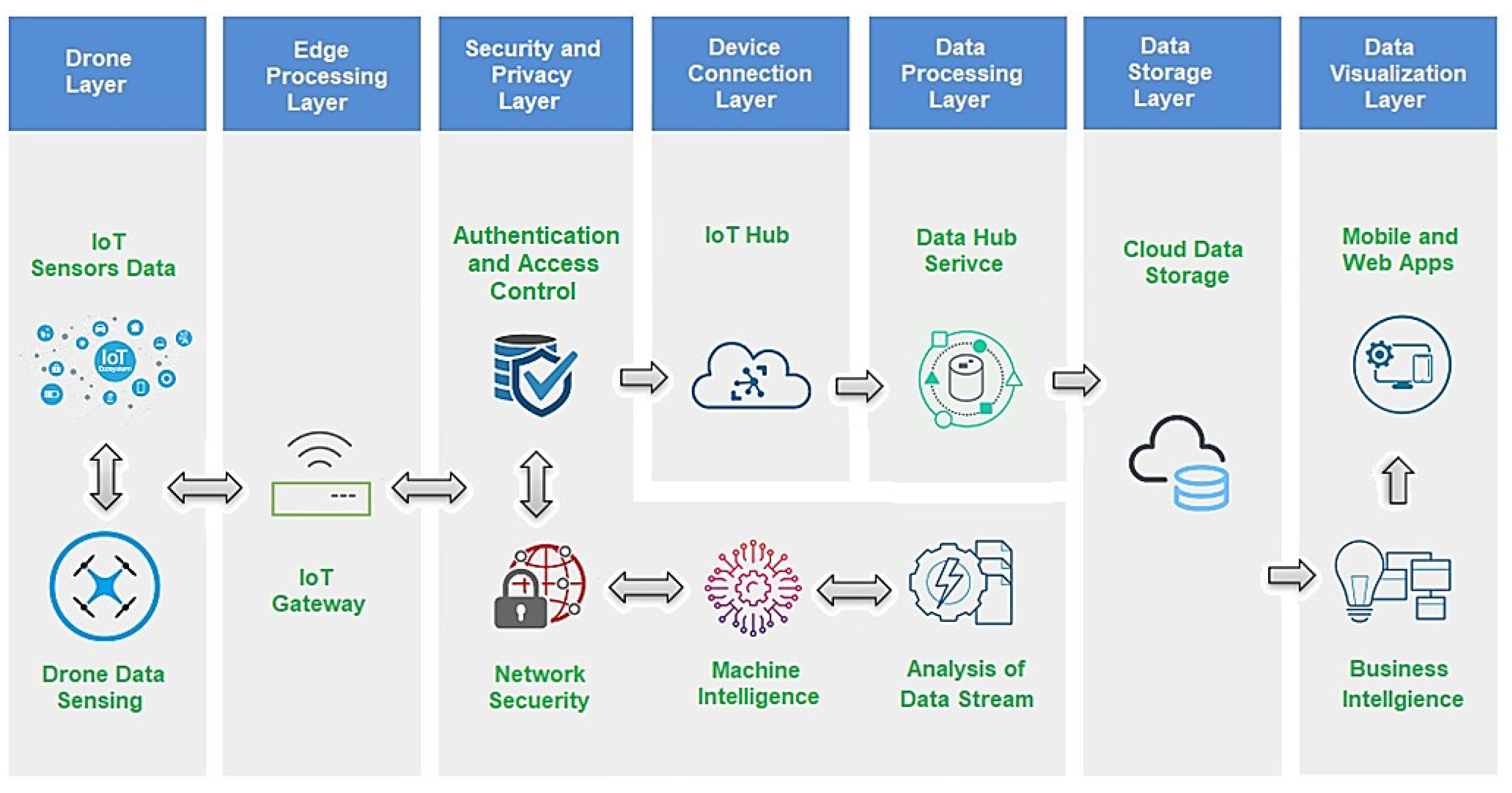
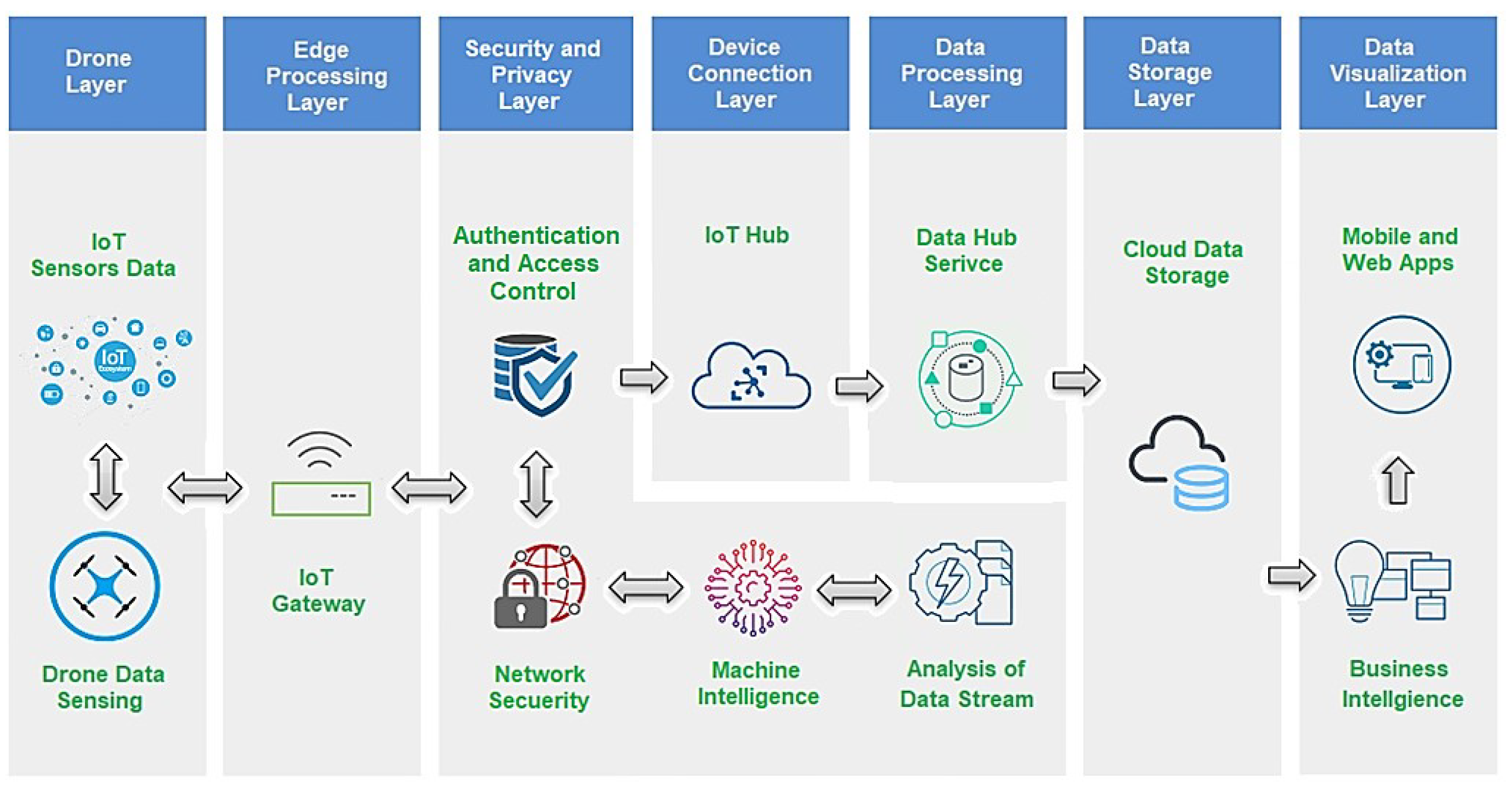
3. Proposed Architecture: Layers and Hardware Components
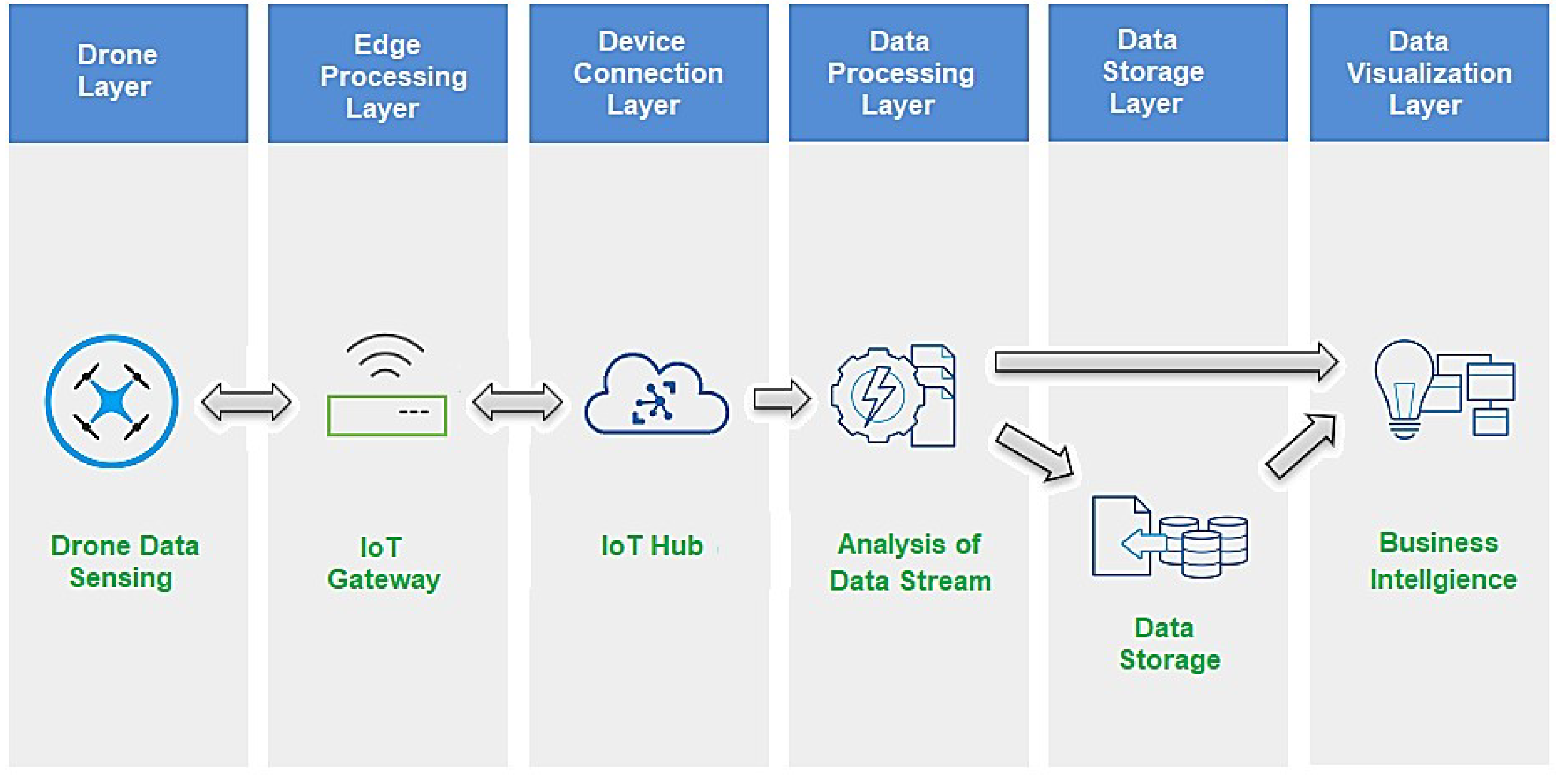
3.1. Layers
3.1.1. Drone Layer
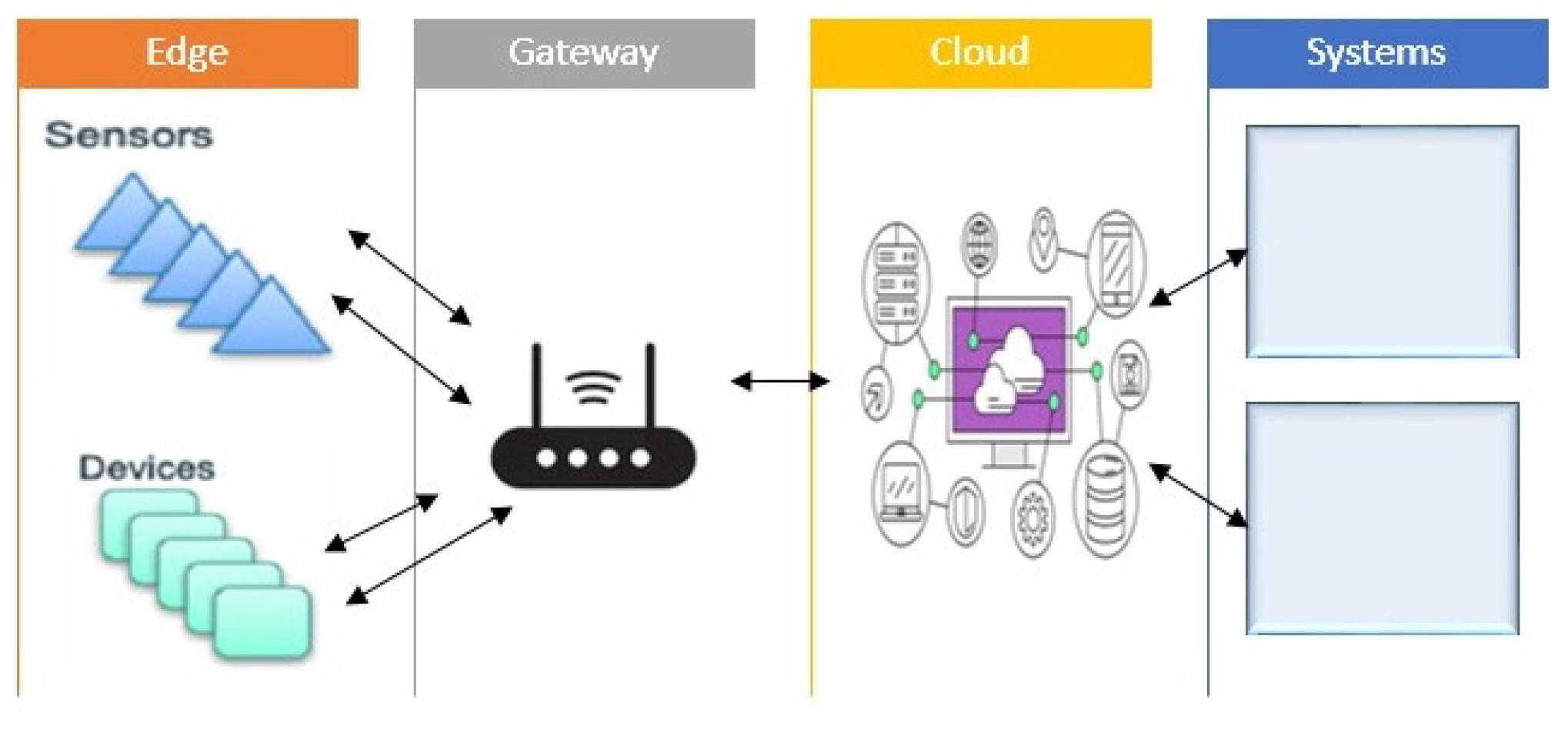
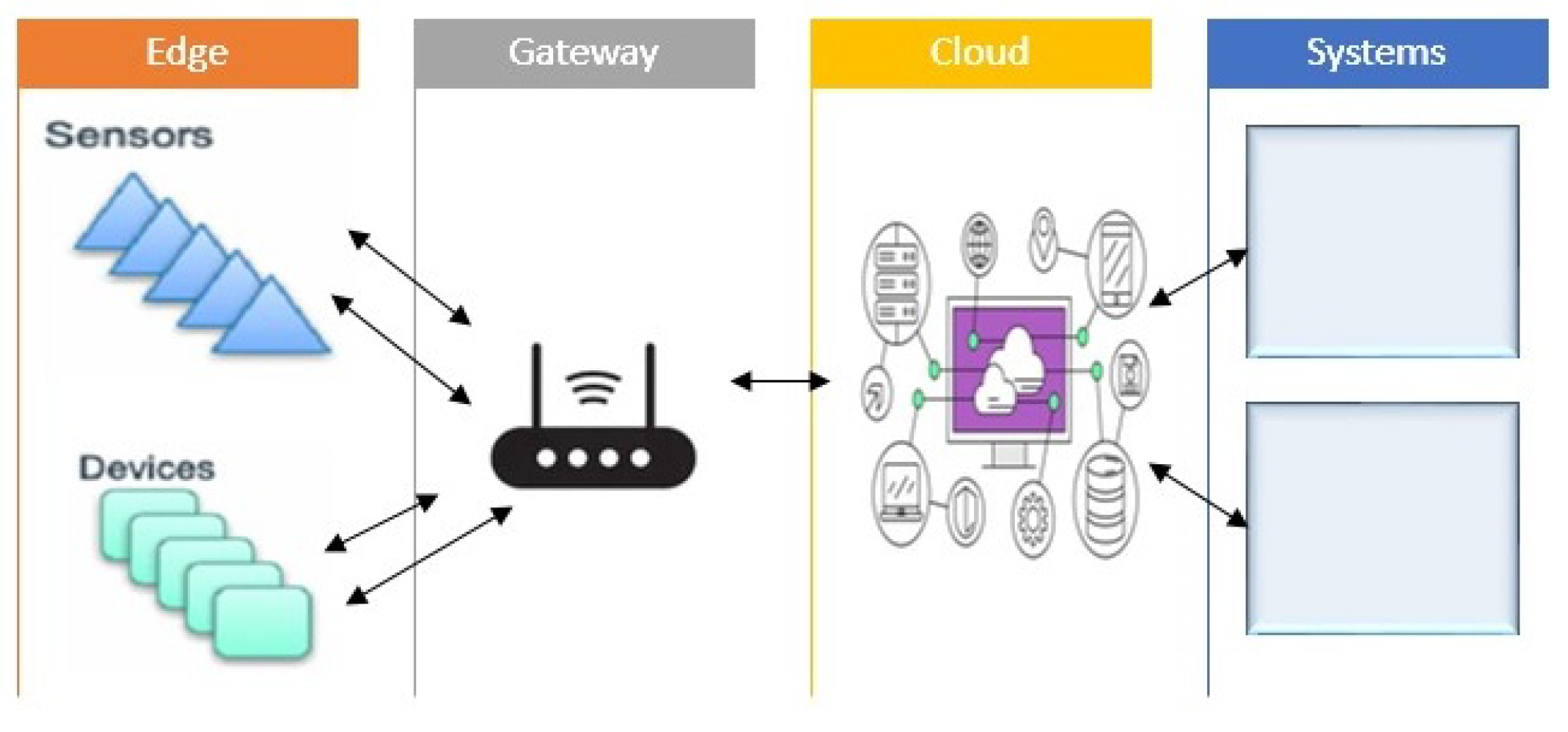
3.1.2. Edge Processing Layer
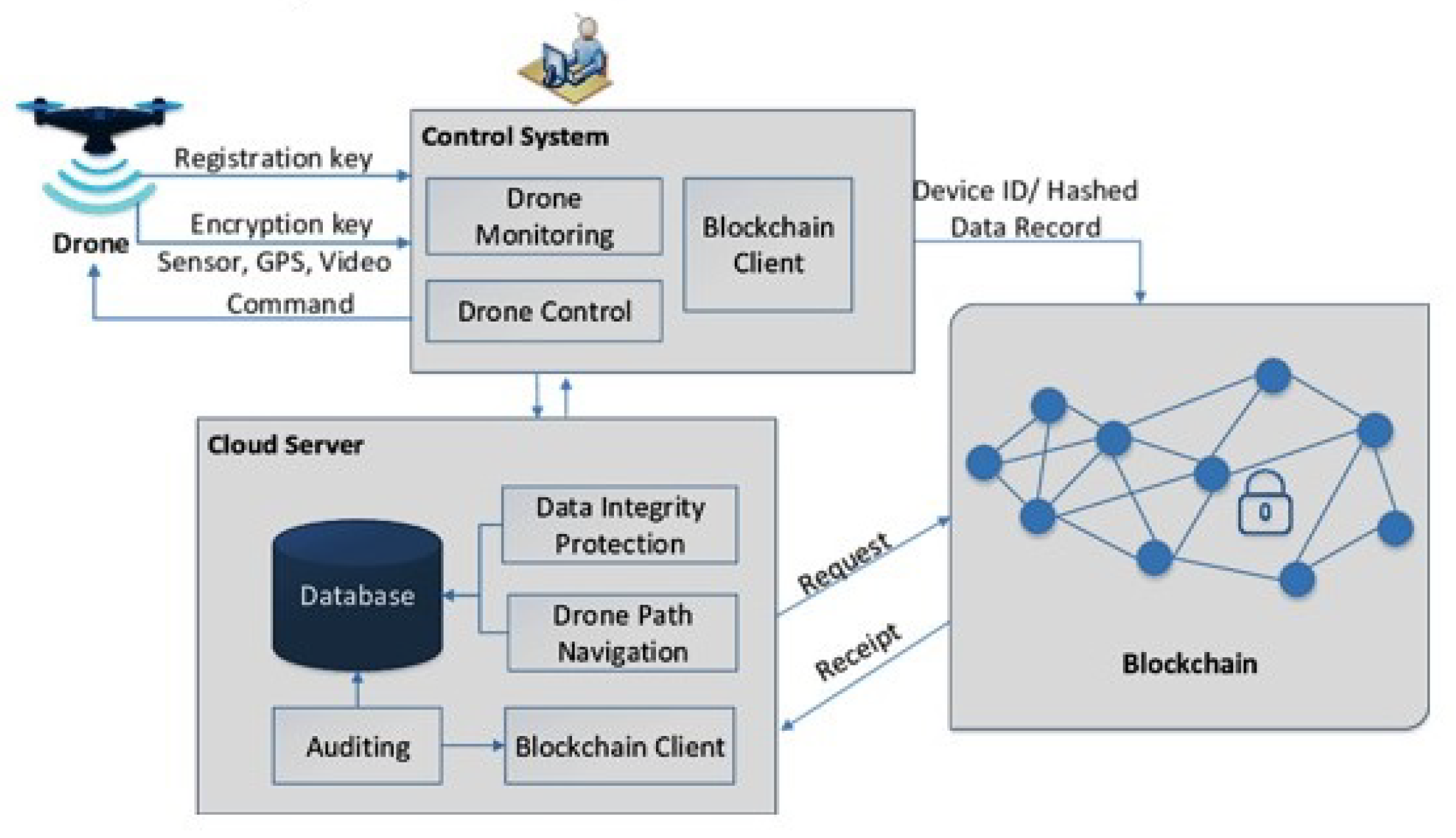
3.1.3. Security and Privacy Layer
- Physical privacy threat;
- Behavior privacy threat;
- Location privacy threat.
3.1.4. Device Connection Layer
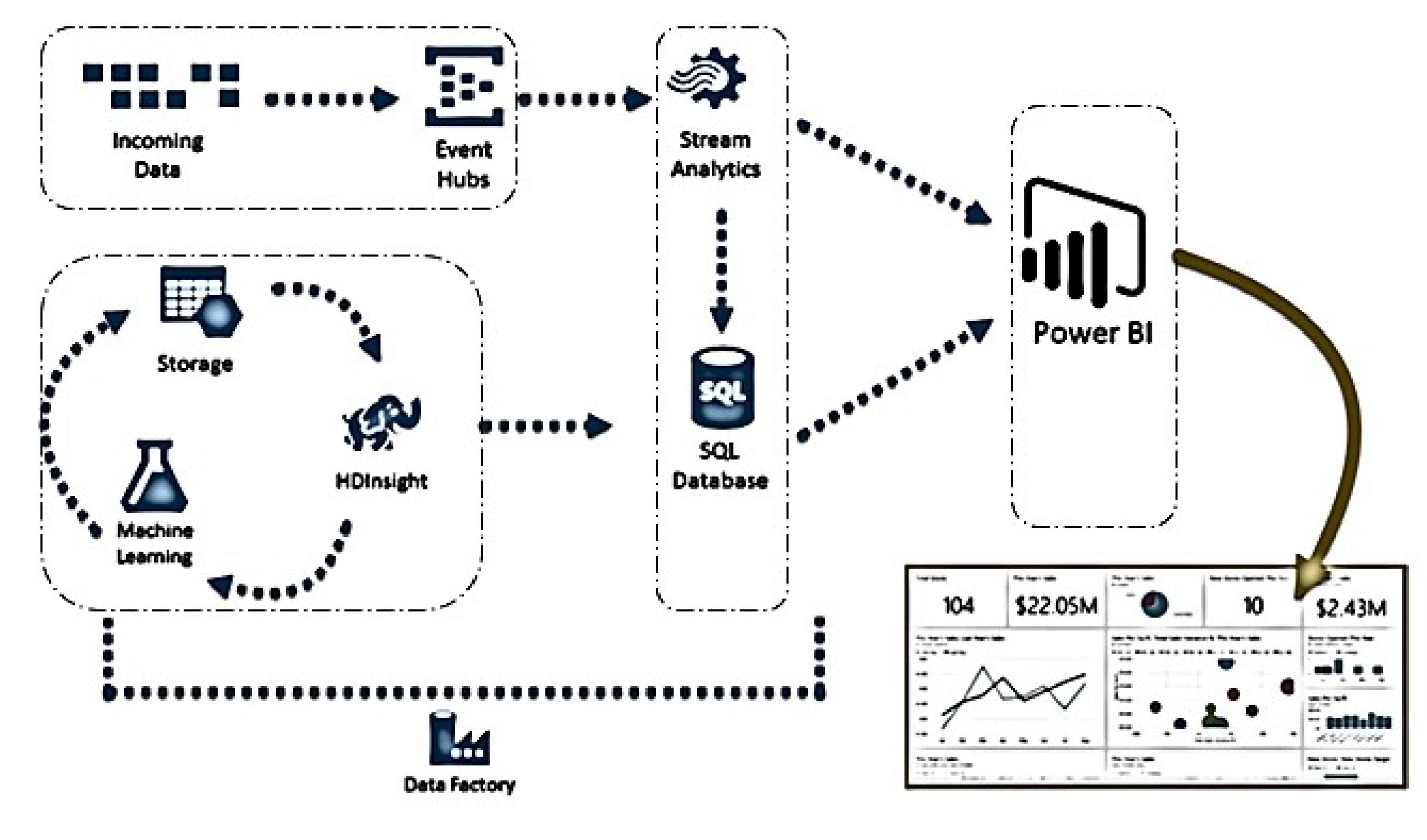
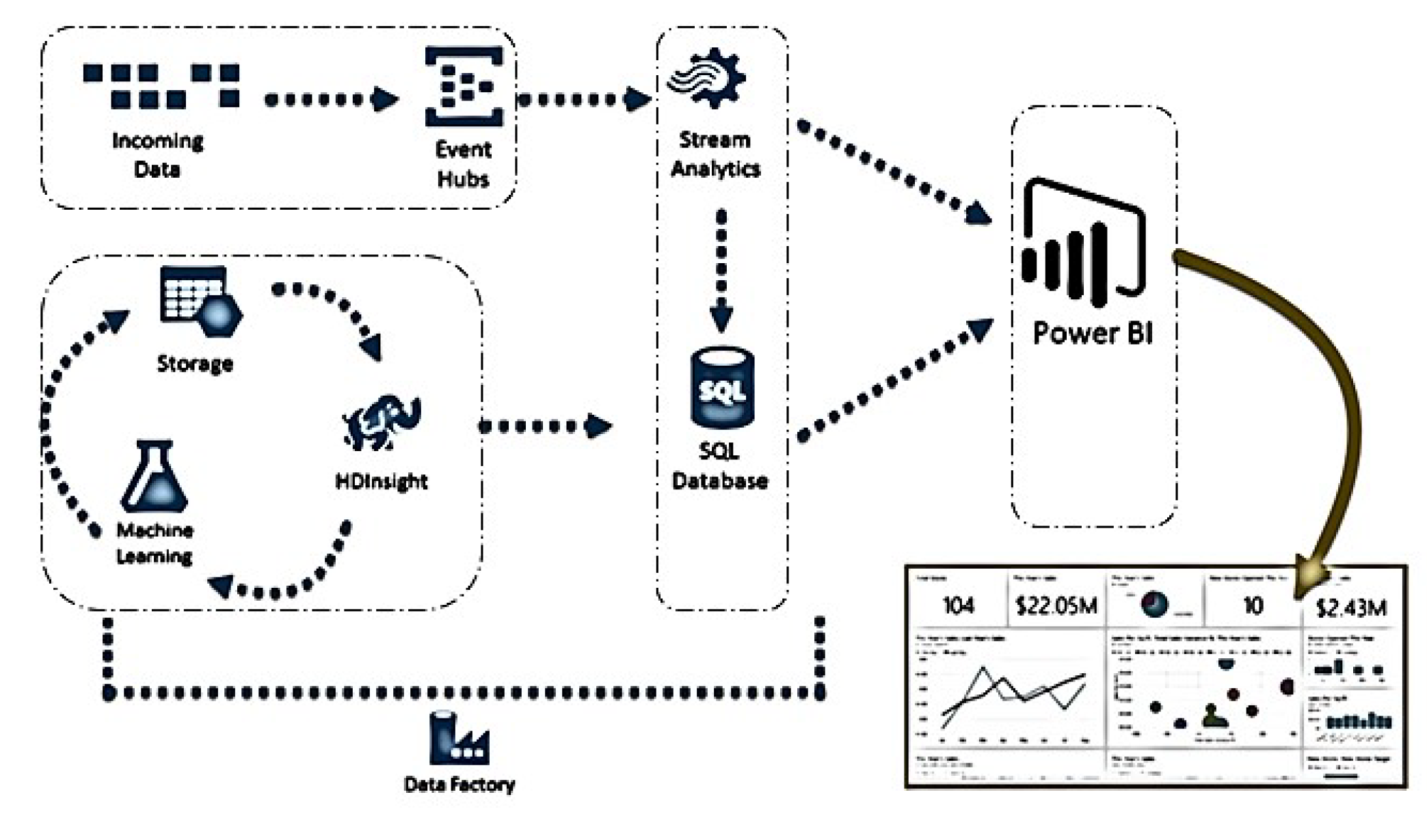
3.1.5. Data Processing Layer
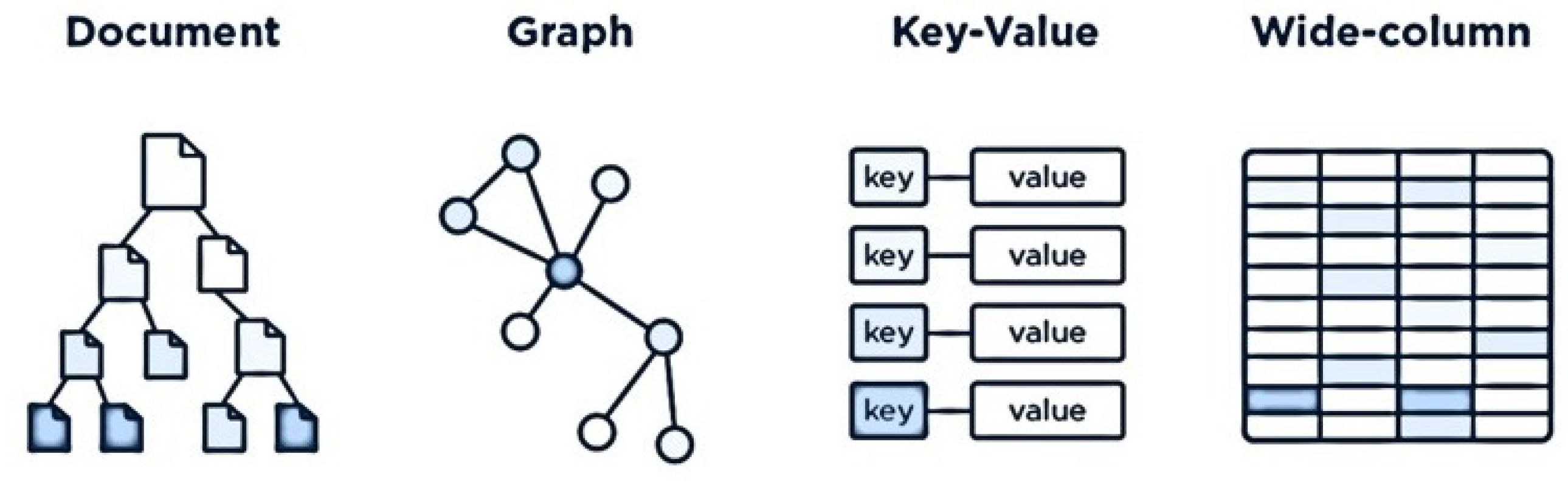
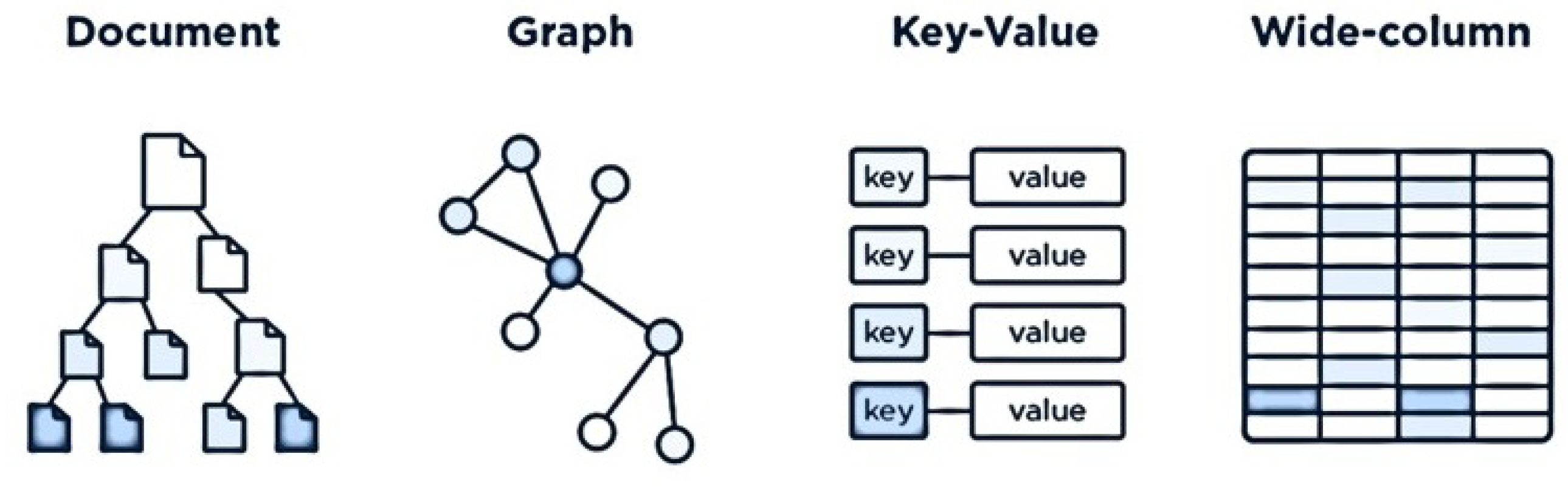
3.1.6. Data Storage Layer
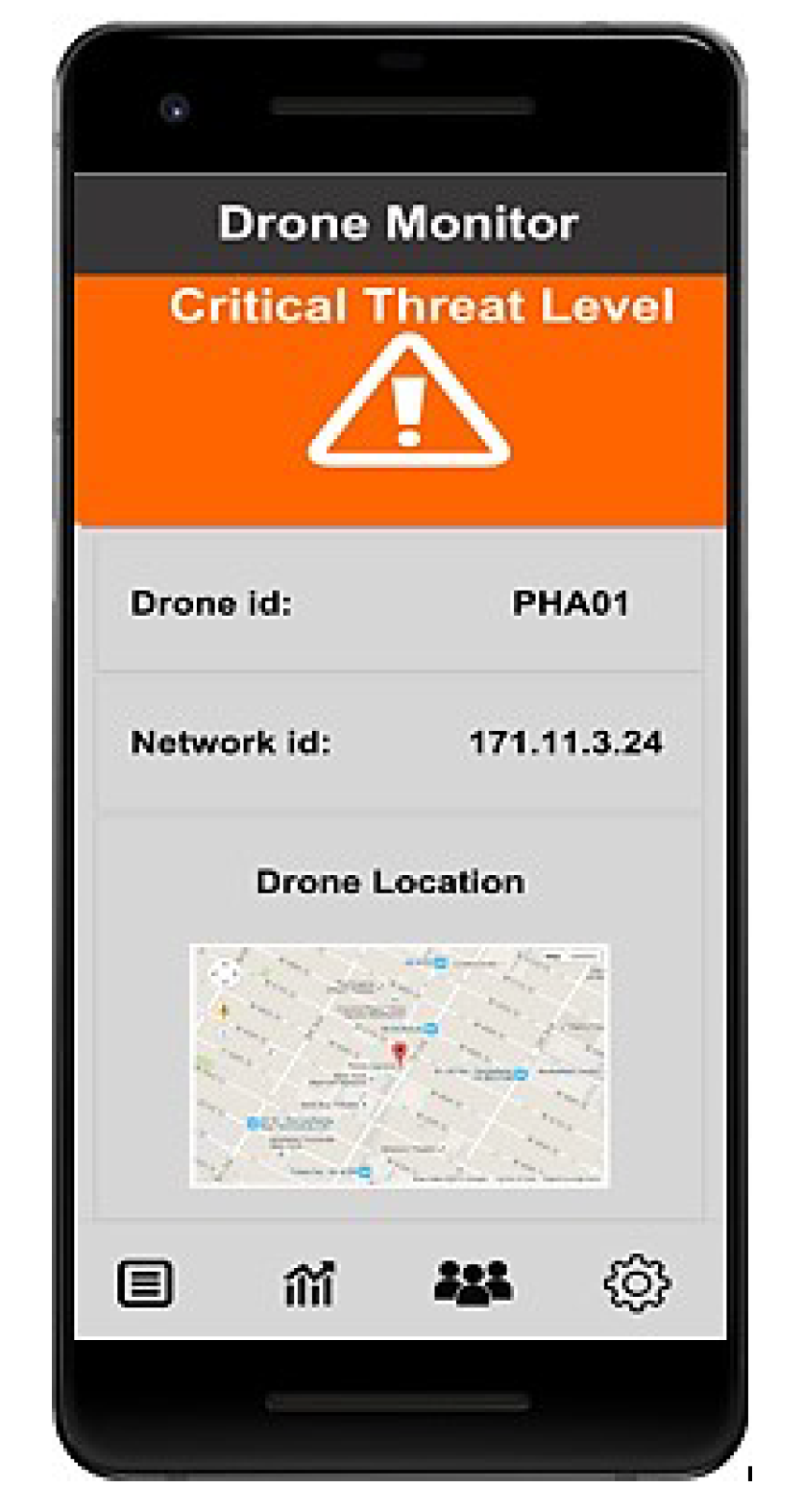
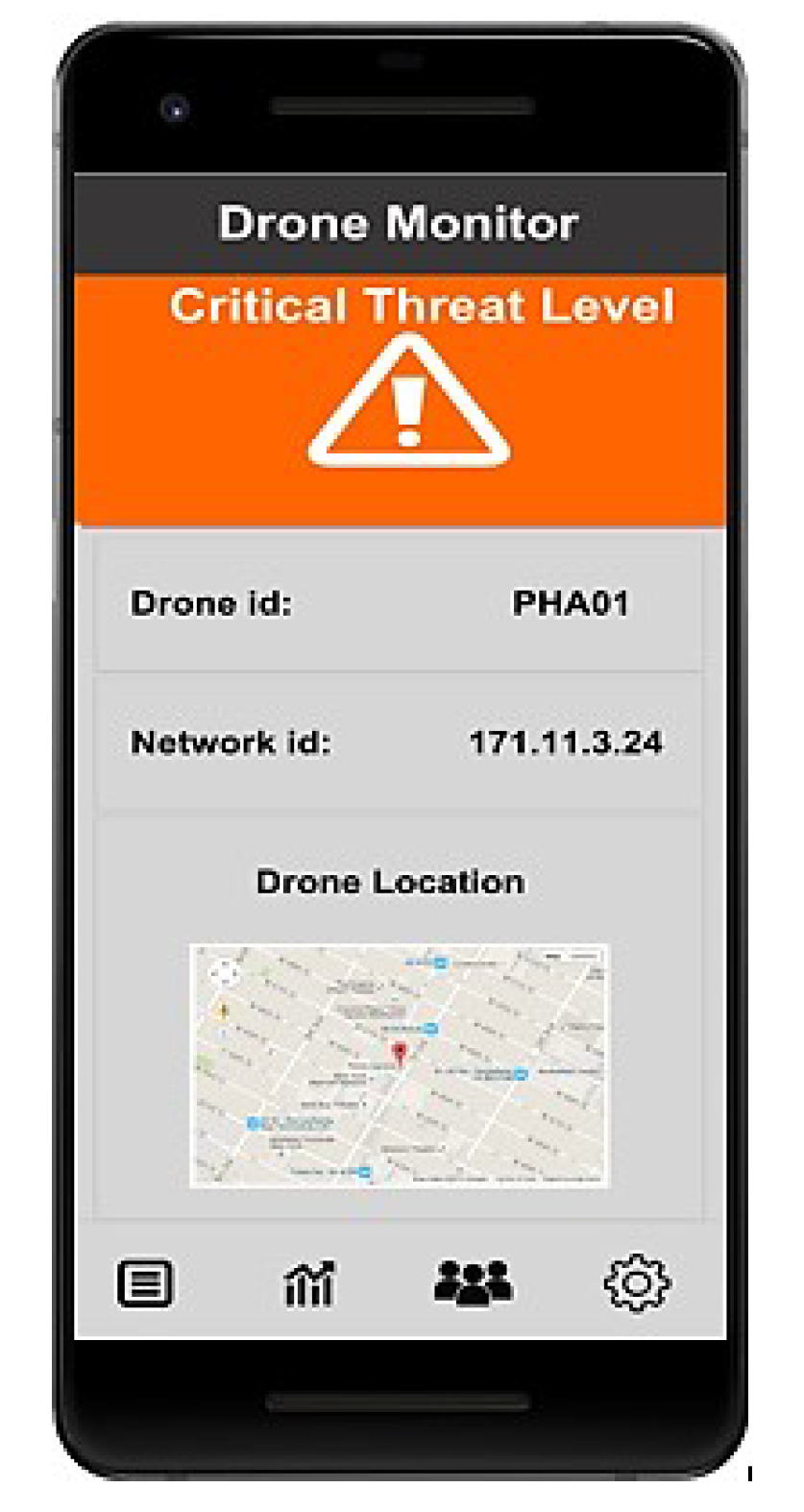
3.1.7. Data Visualization Layer
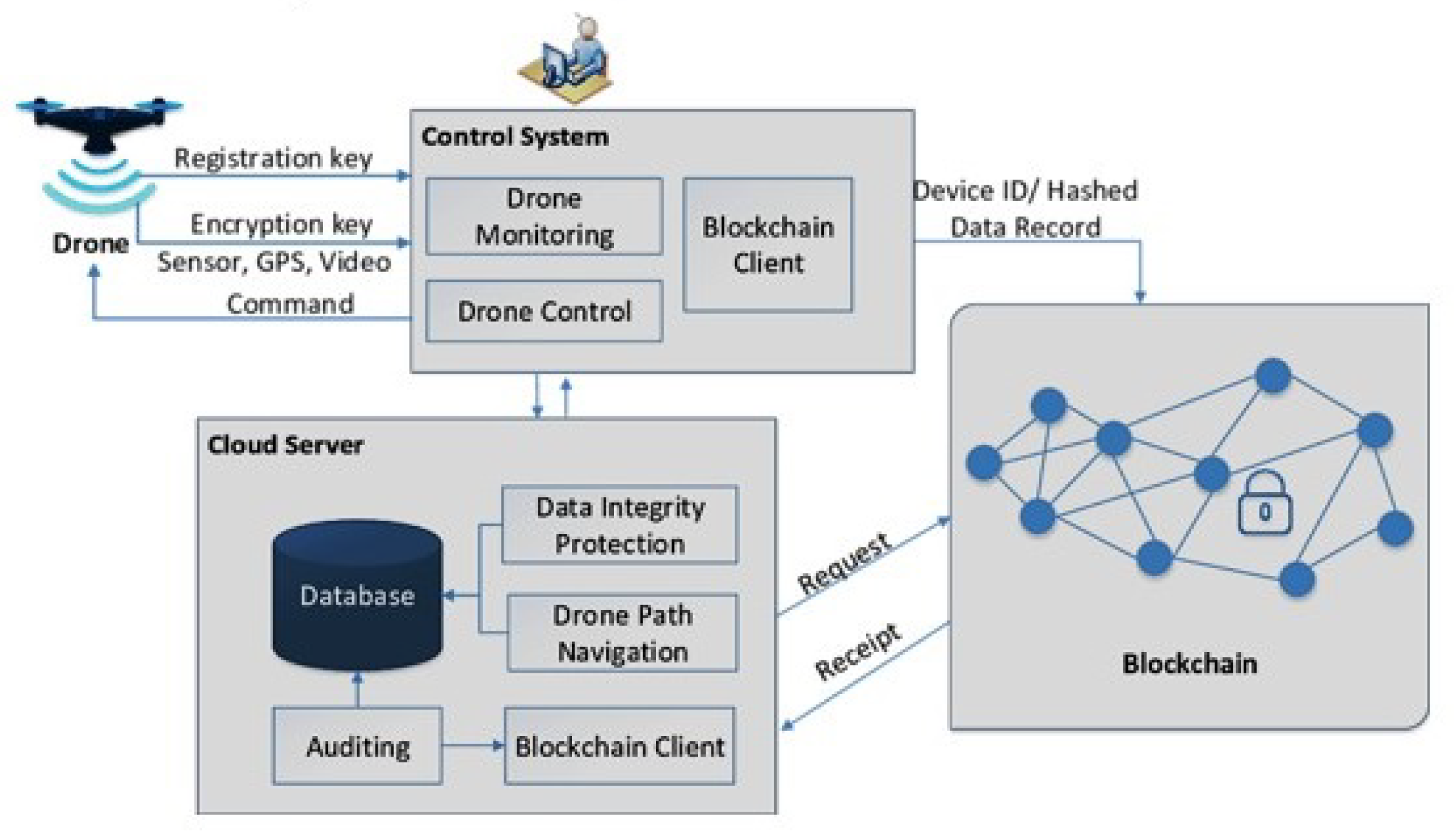
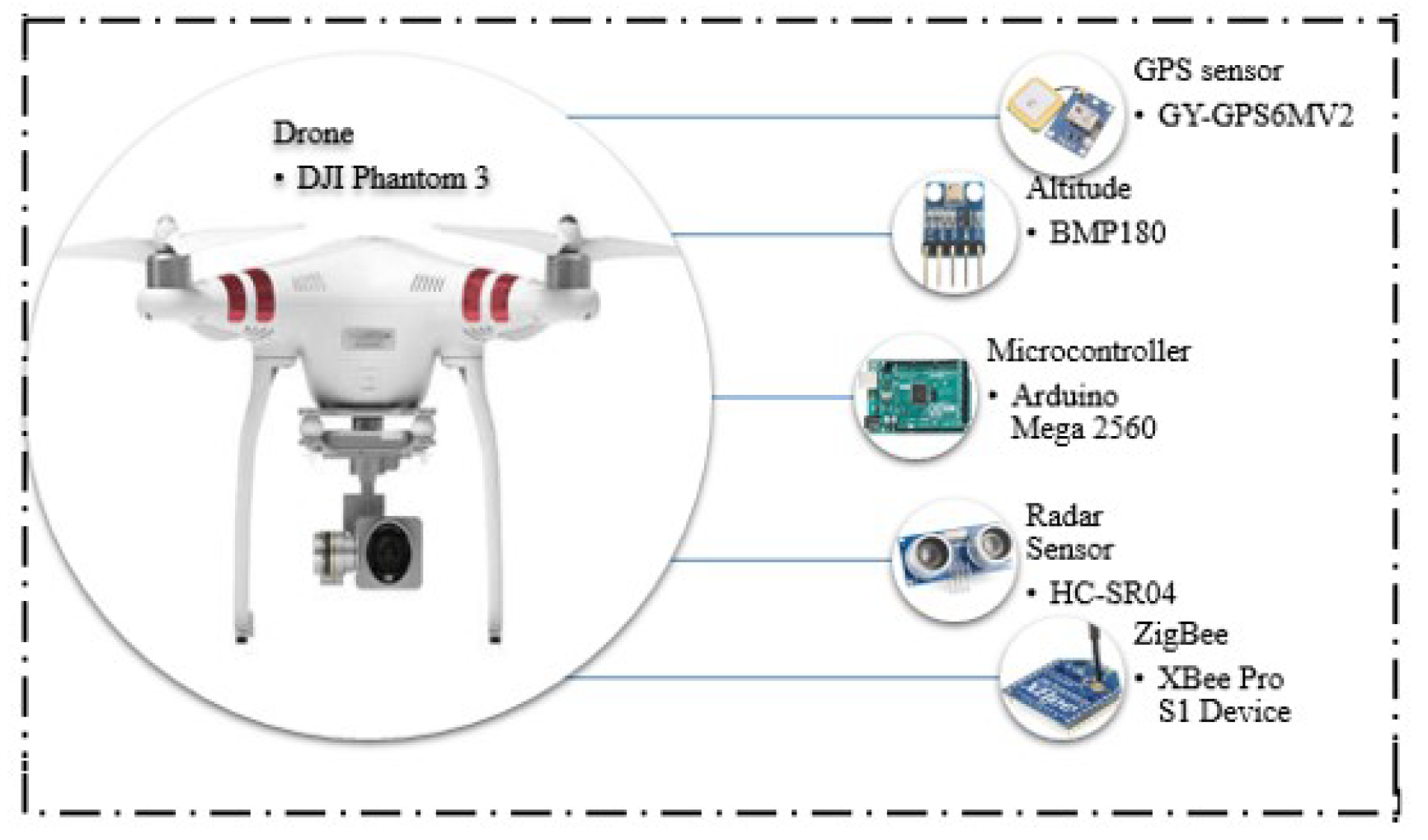
3.2. Hardware Components
3.2.1. DJI Phantom 3 Drone
3.2.2. Radar Sensor
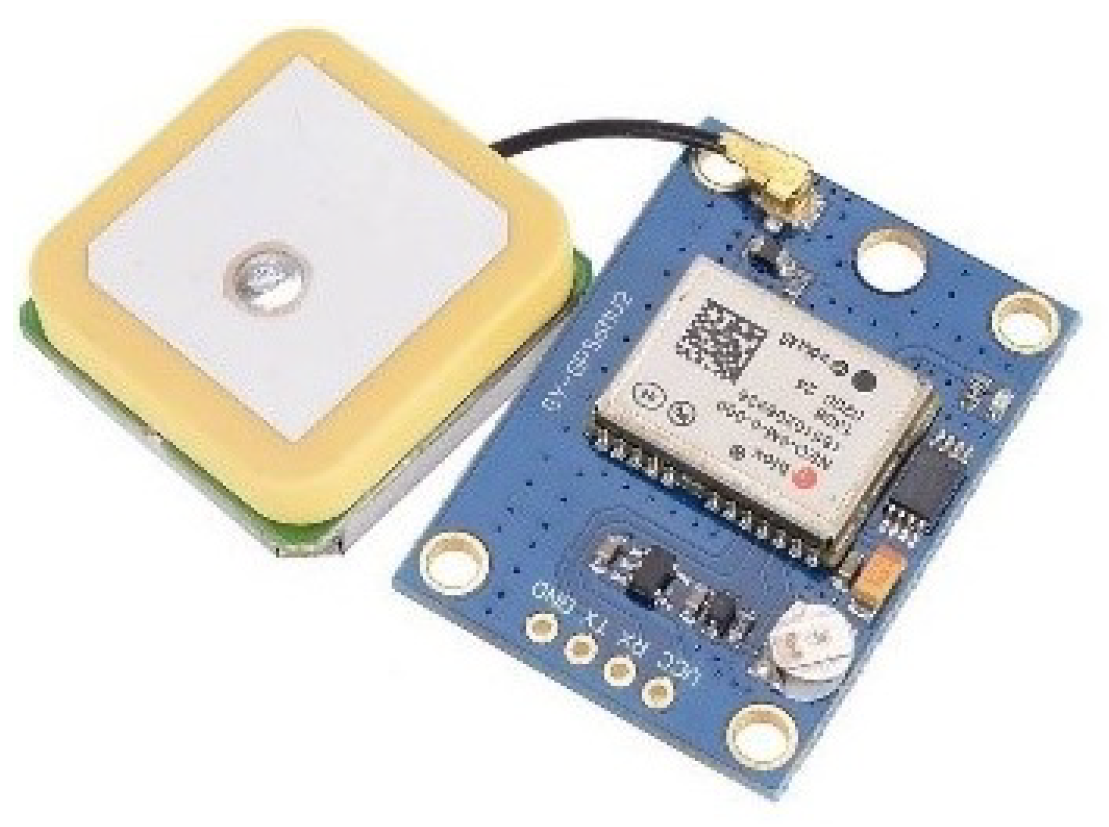
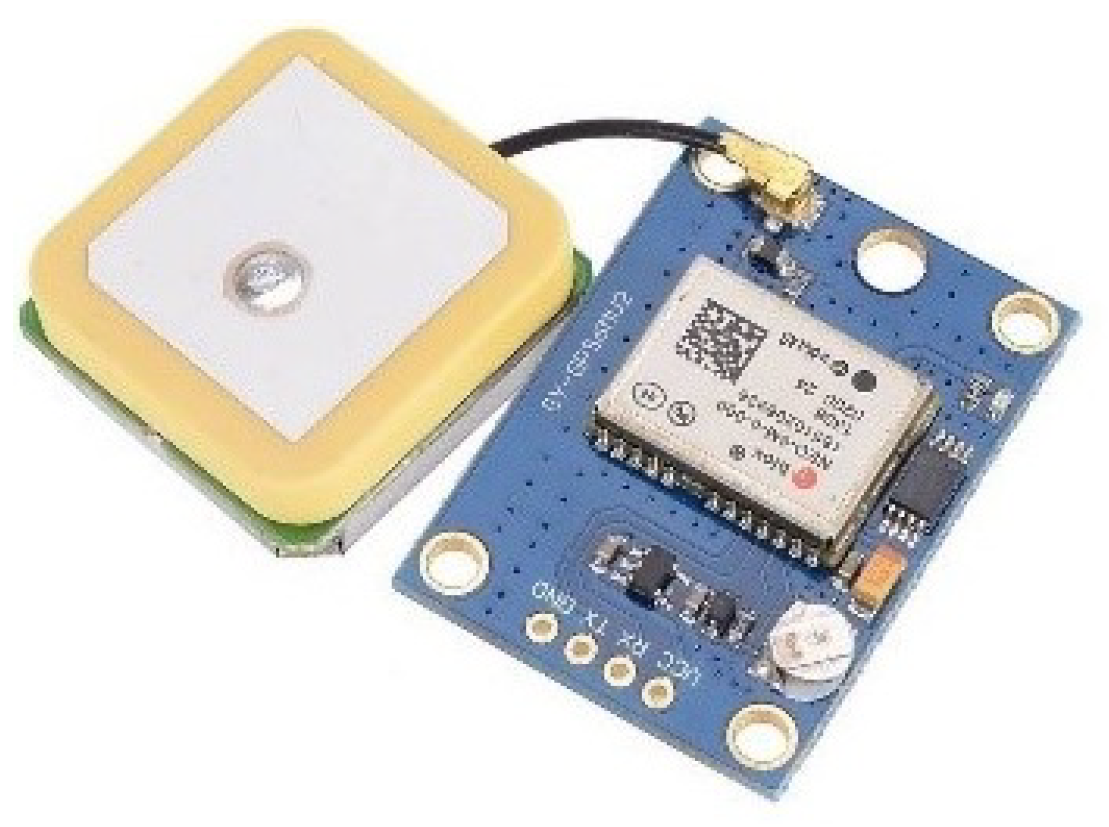
3.2.3. GPS Sensor
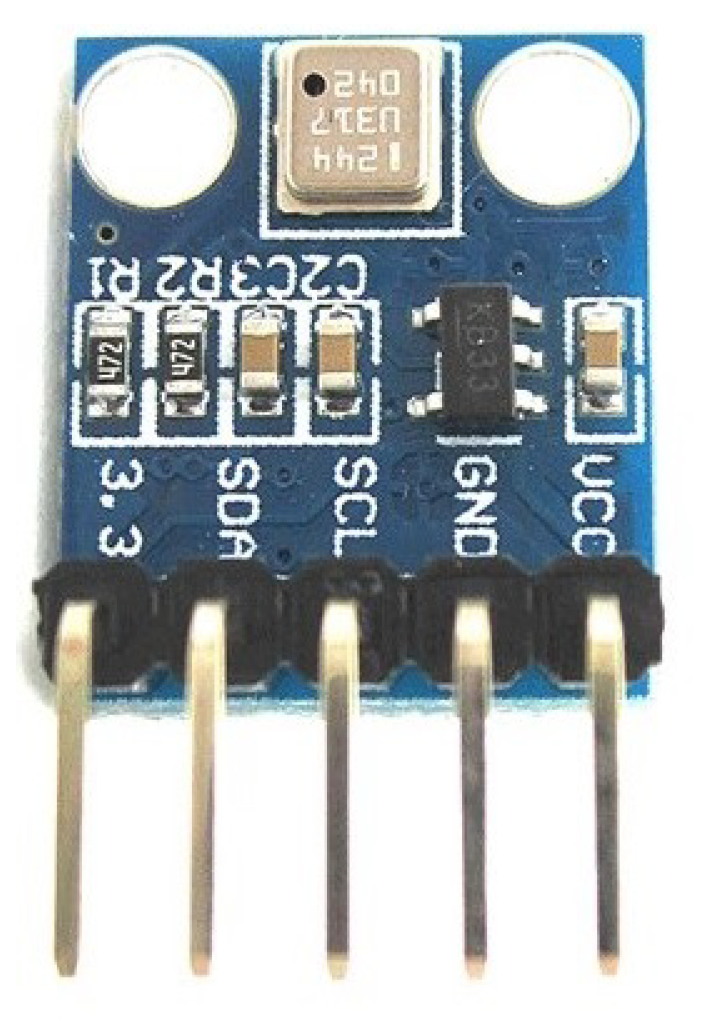
3.2.4. Pressure Sensor
3.2.5. ZigBee Wireless Transmission
4. Securing Drones
- Drone cyber-security threat exposure;
- Denial of service attacks;
- Malicious attacks;
- Jamming;
- Spoofing.
4.1. Approach
4.1.1. Dataset
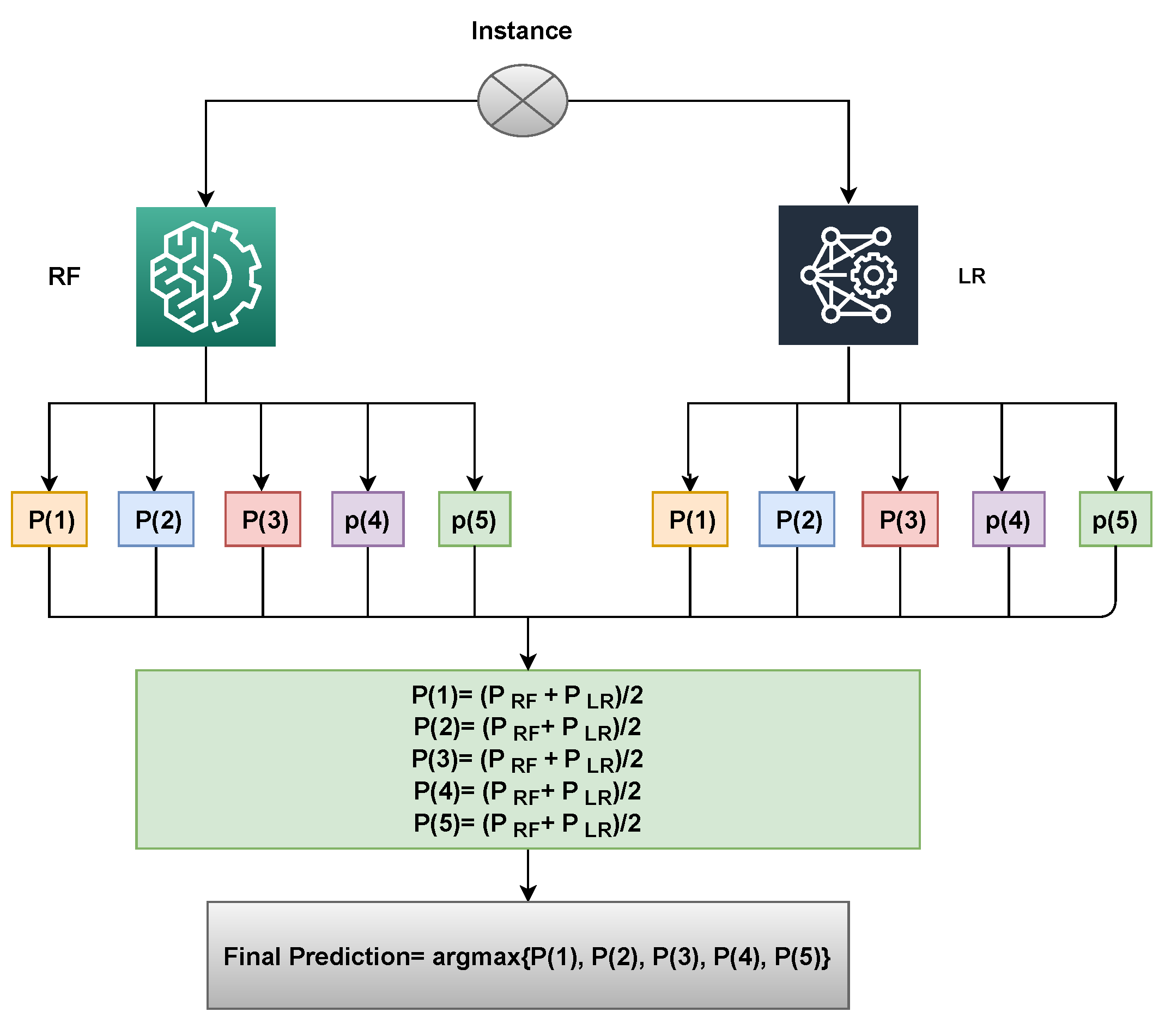
4.1.2. Machine and Deep Learning Models
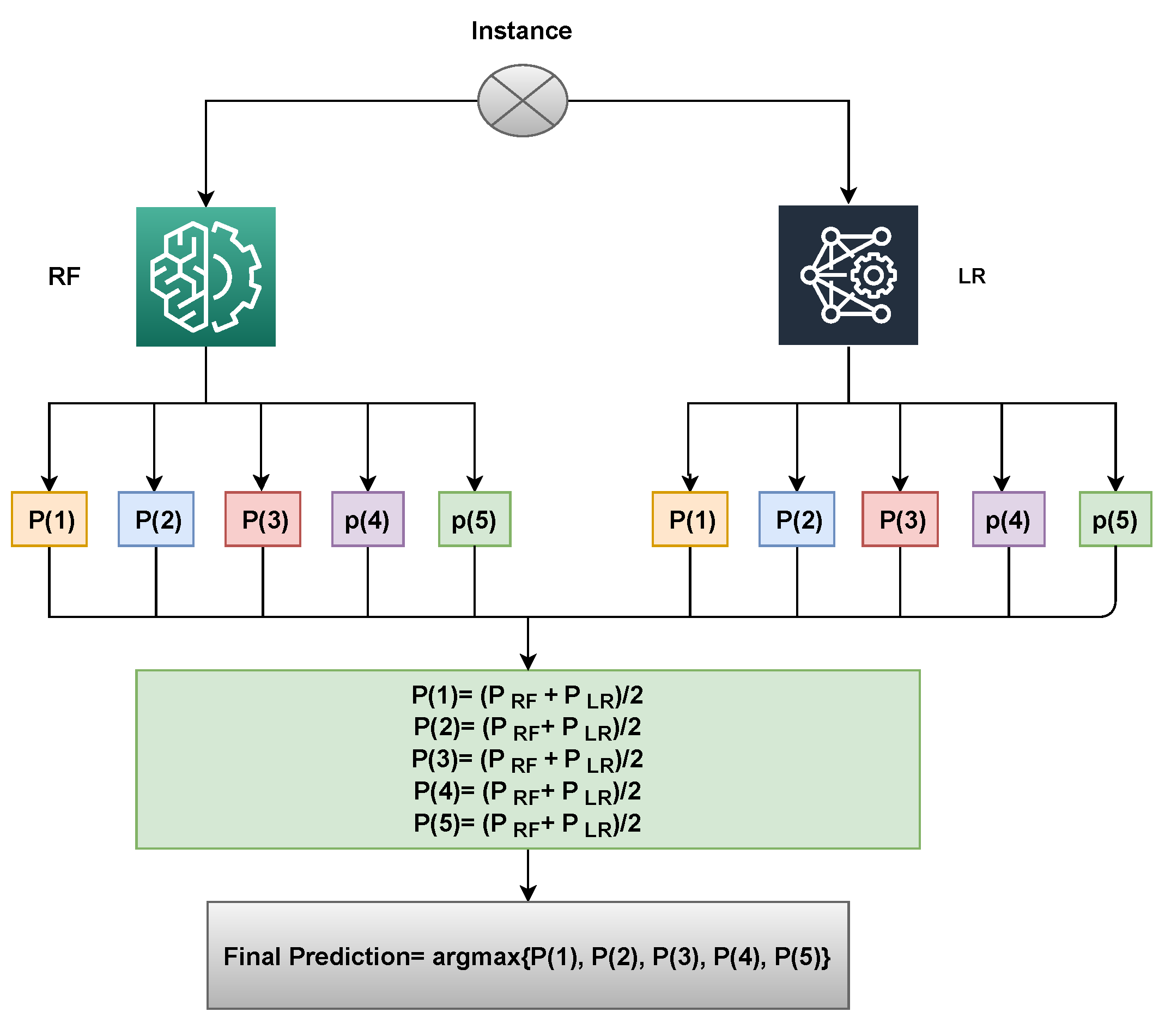
| Algorithm 1 Ensembling of Logistic Regression and Random Forest Classifier (LRRF). |
| Input: input data = Trained_ LR = Trained_ RF
|
5. Experiments and Results
5.1. Comparison of the Results of the Proposed Model with Baseline Classifiers
5.2. Comparison with Other State-of-the-Art Approaches
6. Conclusions
Author Contributions
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fujimoto, K. DroneWorks Teams Up with Microsoft to Build a Safety Flight Platform for Industrial Drones by Using Azure IoT Hub. Available online: https://microsoft.github.io/techcasestudies/iot/2017/05/19/DroneWorks.html (accessed on 8 April 2020).
- Hell, P.M.; Varga, P.J. Drone systems for factory security and surveillance. Interdiscip. Descr. Complex Syst. INDECS 2019, 17, 458–467. [Google Scholar] [CrossRef]
- Tosato, P.; Facinelli, D.; Prada, M.; Gemma, L.; Rossi, M.; Brunelli, D. An autonomous swarm of drones for industrial gas sensing applications. In Proceedings of the 2019 IEEE 20th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Washington, DC, USA, 10–12 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Koslowski, R.; Schulzke, M. Drones along borders: Border security UAVs in the United States and the European Union. Int. Stud. Perspect. 2018, 19, 305–324. [Google Scholar] [CrossRef]
- Vattapparamban, E.; Güvenç, I.; Yurekli, A.I.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 international wireless communications and mobile computing conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 216–221. [Google Scholar]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Almalki, F.A. Survey on collaborative smart drones and internet of things for improving smartness of smart cities. IEEE Access 2019, 7, 128125–128152. [Google Scholar] [CrossRef]
- Nouacer, R.; Ortiz, H.E.; Ouhammou, Y.; González, R.C. Framework of Key Enabling Technologies for Safe and Autonomous Drones’ Applications. In Proceedings of the 2019 22nd Euromicro Conference on Digital System Design (DSD), Kallithea, Greece, 28–30 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 420–427. [Google Scholar]
- Saha, H.N.; Roy, R.; Chakraborty, M.; Sarkar, C. IoT-Enabled Agricultural System Application, Challenges and Security Issues. In Agricultural Informatics: Automation Using the IoT and Machine Learning; Wiley: Hoboken, NJ, USA, 2021; pp. 223–247. [Google Scholar]
- Ferrag, M.A.; Shu, L.; Yang, X.; Derhab, A.; Maglaras, L. Security and privacy for green IoT-based agriculture: Review, blockchain solutions, and challenges. IEEE Access 2020, 8, 32031–32053. [Google Scholar] [CrossRef]
- Lin, C.; He, D.; Kumar, N.; Choo, K.K.R.; Vinel, A.; Huang, X. Security and privacy for the internet of drones: Challenges and solutions. IEEE Commun. Mag. 2018, 56, 64–69. [Google Scholar] [CrossRef]
- Rogers, J. Small States and Armed Drones; Small States and the New Security Environment; University of Iceland: Reykjavik, Iceland, 2018. [Google Scholar]
- Chang, V.; Chundury, P.; Chetty, M. Spiders in the sky: User perceptions of drones, privacy, and security. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 6765–6776. [Google Scholar]
- Altawy, R.; Youssef, A.M. Security, privacy, and safety aspects of civilian drones: A survey. ACM Trans. Cyber-Phys. Syst. 2016, 1, 1–25. [Google Scholar] [CrossRef]
- Akram, R.N.; Markantonakis, K.; Mayes, K.; Habachi, O.; Sauveron, D.; Steyven, A.; Chaumette, S. Security, privacy and safety evaluation of dynamic and static fleets of drones. In Proceedings of the 2017 IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), St. Petersburg, FL, USA, 17–21 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–12. [Google Scholar]
- Nayyar, A.; Nguyen, B.L.; Nguyen, N.G. The internet of drone things (IoDT): Future envision of smart drones. In First International Conference on Sustainable Technologies for Computational Intelligence; Springer: Berlin/Heidelberg, Germany, 2020; pp. 563–580. [Google Scholar]
- Yin, Z.; Song, Q.; Han, G.; Zhu, M. Unmanned optical warning system for drones. In Proceedings of the Global Intelligence Industry Conference (GIIC 2018), Beijing, China, 22–24 May 2018; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10835, p. 108350Q. [Google Scholar]
- Ozmen, M.O.; Yavuz, A.A. Dronecrypt-an efficient cryptographic framework for small aerial drones. In Proceedings of the MILCOM 2018–2018 IEEE Military Communications Conference (MILCOM), Angeles, CA, USA, 29–31 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar]
- Ozmen, M.O.; Behnia, R.; Yavuz, A.A. IoD-crypt: A lightweight cryptographic framework for Internet of drones. arXiv 2019, arXiv:1904.06829. [Google Scholar]
- Bertino, E. Data Security and Privacy in the IoT. In Proceedings of the 19th International Conference on Extending Database Technology (EDBT), Bordeaux, France, 15–18 March 2016; Volume 2016, pp. 1–3. [Google Scholar]
- Rodday, N. Hacking a professional drone. Black Hat Asia 2016, 2016, 1–2. [Google Scholar]
- Highnam, K.; Angstadt, K.; Leach, K.; Weimer, W.; Paulos, A.; Hurley, P. An uncrewed aerial vehicle attack scenario and trustworthy repair architecture. In Proceedings of the 2016 46th Annual IEEE/IFIP International Conference on Dependable Systems and Networks Workshop (DSN-W), Toulouse, France, 28 June–1 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 222–225. [Google Scholar]
- Shoufan, A. Continuous authentication of uav flight command data using behaviometrics. In Proceedings of the 2017 IFIP/IEEE International Conference on Very Large Scale Integration (VLSI-SoC), Abu Dhabi, United Arab Emirates, 23–25 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Luo, A. Drones Hijacking; Tech. Report; DEF CON: Paris, France, 2016. [Google Scholar]
- Kerns, A.J.; Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E. Unmanned aircraft capture and control via GPS spoofing. J. Field Robot. 2014, 31, 617–636. [Google Scholar] [CrossRef]
- Feng, Z.; Guan, N.; Lv, M.; Liu, W.; Deng, Q.; Liu, X.; Yi, W. Efficient drone hijacking detection using onboard motion sensors. In Proceedings of the Design, Automation & Test in Europe Conference & Exhibition (DATE), Lausanne, Switzerland, 27–31 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1414–1419. [Google Scholar]
- Feng, Z.; Guan, N.; Lv, M.; Liu, W.; Deng, Q.; Liu, X.; Yi, W. An efficient uav hijacking detection method using onboard inertial measurement unit. ACM Trans. Embed. Comput. Syst. (TECS) 2018, 17, 1–19. [Google Scholar] [CrossRef]
- Son, Y.; Shin, H.; Kim, D.; Park, Y.; Noh, J.; Choi, K.; Choi, J.; Kim, Y. Rocking drones with intentional sound noise on gyroscopic sensors. In Proceedings of the 24th fUSENIXg Security Symposium (fUSENIXg Security 15), Washington, DC, USA, 12–14 August 2015; pp. 881–896. [Google Scholar]
- Choi, H.; Lee, W.C.; Aafer, Y.; Fei, F.; Tu, Z.; Zhang, X.; Xu, D.; Deng, X. Detecting attacks against robotic vehicles: A control invariant approach. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 801–816. [Google Scholar]
- Gallacher, D. Drones to manage the urban environment: Risks, rewards, alternatives. J. Unmanned Veh. Syst. 2016, 4, 115–124. [Google Scholar] [CrossRef] [Green Version]
- Lv, Z. The security of Internet of drones. Comput. Commun. 2019, 148, 208–214. [Google Scholar] [CrossRef]
- Choudhary, G.; Sharma, V.; Gupta, T.; Kim, J.; You, I. Internet of Drones (IoD): Threats, vulnerability, and security perspectives. arXiv 2018, arXiv:1808.00203. [Google Scholar]
- Zhou, J.; Cao, Z.; Dong, X.; Vasilakos, A.V. Security and privacy for cloud-based IoT: Challenges. IEEE Commun. Mag. 2017, 55, 26–33. [Google Scholar] [CrossRef]
- Nassi, B.; Shabtai, A.; Masuoka, R.; Elovici, Y. SoK-security and privacy in the age of drones: Threats, challenges, solution mechanisms, and scientific gaps. arXiv 2019, arXiv:1903.05155. [Google Scholar]
- Giraldo, J.; Sarkar, E.; Cardenas, A.A.; Maniatakos, M.; Kantarcioglu, M. Security and privacy in cyber-physical systems: A survey of surveys. IEEE Des. Test 2017, 34, 7–17. [Google Scholar] [CrossRef]
- Lagkas, T.; Argyriou, V.; Bibi, S.; Sarigiannidis, P. UAV IoT framework views and challenges: Towards protecting drones as “Things”. Sensors 2018, 18, 4015. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Yuan, J.; Song, H. Efficient privacy-preserving authentication framework for edge-assisted Internet of Drones. J. Inf. Secur. Appl. 2019, 48, 102354. [Google Scholar] [CrossRef]
- Yaacoub, J.P.; Noura, H.; Salman, O.; Chehab, A. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar] [CrossRef]
- Albalawi, M.; Song, H. Data security and privacy issues in swarms of drones. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), New York, NY, USA, 9–11 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–11. [Google Scholar]
- Bera, B.; Saha, S.; Das, A.K.; Kumar, N.; Lorenz, P.; Alazab, M. Blockchain-envisioned secure data delivery and collection scheme for 5g-based iot-enabled internet of drones environment. IEEE Trans. Veh. Technol. 2020, 69, 9097–9111. [Google Scholar] [CrossRef]
- Zhang, Y.; He, D.; Li, L.; Chen, B. A lightweight authentication and key agreement scheme for internet of drones. Comput. Commun. 2020, 154, 455–464. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. FANET: Communication, mobility models and security issues. Comput. Netw. 2019, 163, 106877. [Google Scholar] [CrossRef]
- Mehta, P.; Gupta, R.; Tanwar, S. Blockchain envisioned UAV networks: Challenges, solutions, and comparisons. Comput. Commun. 2020, 151, 518–538. [Google Scholar] [CrossRef]
- Xiao, L.; Xie, C.; Chen, T.; Dai, H.; Poor, H.V. A mobile offloading game against smart attacks. IEEE Access 2016, 4, 2281–2291. [Google Scholar] [CrossRef]
- Kulkarni, R.V.; Venayagamoorthy, G.K. Neural network based secure media access control protocol for wireless sensor networks. In Proceedings of the 2009 International Joint Conference on Neural Networks, Atlanta, GA, USA, 14–19 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1680–1687. [Google Scholar]
- Alsheikh, M.A.; Lin, S.; Niyato, D.; Tan, H.P. Machine learning in wireless sensor networks: Algorithms, strategies, and applications. IEEE Commun. Surv. Tutor. 2014, 16, 1996–2018. [Google Scholar] [CrossRef] [Green Version]
- Vedula, V.; Lama, P.; Boppana, R.V.; Trejo, L.A. On the Detection of Low-Rate Denial of Service Attacks at Transport and Application Layers. Electronics 2021, 10, 2105. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sinopoli, B. Active Attack Detection and Control in Constrained Cyber-Physical Systems Under Prevented Actuation Attack. arXiv 2021, arXiv:2101.09885. [Google Scholar]
- Han, G.; Xiao, L.; Poor, H.V. Two-dimensional anti-jamming communication based on deep reinforcement learning. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2019; IEEE: Piscataway, NJ, USA, 2017; pp. 2087–2091. [Google Scholar]
- Tan, Z.; Jamdagni, A.; He, X.; Nanda, P.; Liu, R.P. A system for denial-of-service attack detection based on multivariate correlation analysis. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 447–456. [Google Scholar]
- Li, Y.; Quevedo, D.E.; Dey, S.; Shi, L. SINR-based DoS attack on remote state estimation: A game-theoretic approach. IEEE Trans. Control. Netw. Syst. 2016, 4, 632–642. [Google Scholar] [CrossRef] [Green Version]
- Xiao, L.; Li, Y.; Huang, X.; Du, X. Cloud-based malware detection game for mobile devices with offloading. IEEE Trans. Mob. Comput. 2017, 16, 2742–2750. [Google Scholar] [CrossRef]
- Narudin, F.A.; Feizollah, A.; Anuar, N.B.; Gani, A. Evaluation of machine learning classifiers for mobile malware detection. Soft Comput. 2016, 20, 343–357. [Google Scholar] [CrossRef]
- Buczak, A.L.; Guven, E. A survey of data mining and machine learning methods for cyber security intrusion detection. IEEE Commun. Surv. Tutor. 2015, 18, 1153–1176. [Google Scholar] [CrossRef]
- Branch, J.W.; Giannella, C.; Szymanski, B.; Wolff, R.; Kargupta, H. In-network outlier detection in wireless sensor networks. Knowl. Inf. Syst. 2013, 34, 23–54. [Google Scholar] [CrossRef] [Green Version]
- Ozay, M.; Esnaola, I.; Vural, F.T.Y.; Kulkarni, S.R.; Poor, H.V. Machine learning methods for attack detection in the smart grid. IEEE Trans. Neural Netw. Learn. Syst. 2015, 27, 1773–1786. [Google Scholar] [CrossRef] [Green Version]
- Shi, C.; Liu, J.; Liu, H.; Chen, Y. Smart user authentication through actuation of daily activities leveraging WiFi-enabled IoT. In Proceedings of the 18th ACM International Symposium on Mobile Ad Hoc Networking and Computing, Chennai, India, 10–14 July 2017; pp. 1–10. [Google Scholar]
- Xiao, L.; Li, Y.; Han, G.; Liu, G.; Zhuang, W. PHY-layer spoofing detection with reinforcement learning in wireless networks. IEEE Trans. Veh. Technol. 2016, 65, 10037–10047. [Google Scholar] [CrossRef]
- Jia, B.; Ma, Y.; Huang, X.; Lin, Z.; Sun, Y. A novel real-time ddos attack detection mechanism based on MDRA algorithm in big data. Math. Probl. Eng. 2016, 2016, 1467051. [Google Scholar] [CrossRef] [Green Version]
- Andresini, G.; Appice, A.; Di Mauro, N.; Loglisci, C.; Malerba, D. Multi-channel deep feature learning for intrusion detection. IEEE Access 2020, 8, 53346–53359. [Google Scholar] [CrossRef]
- Lian, W.; Nie, G.; Jia, B.; Shi, D.; Fan, Q.; Liang, Y. An Intrusion Detection Method Based on Decision Tree-Recursive Feature Elimination in Ensemble Learning. Math. Probl. Eng. 2020, 2020, 2835023. [Google Scholar] [CrossRef]
- Hussain, J.; Lalmuanawma, S.; Chhakchhuak, L. A two-stage hybrid classification technique for network intrusion detection system. Int. J. Comput. Intell. Syst. 2016, 9, 863–875. [Google Scholar] [CrossRef] [Green Version]
- Jiang, K.; Wang, W.; Wang, A.; Wu, H. Network intrusion detection combined hybrid sampling with deep hierarchical network. IEEE Access 2020, 8, 32464–32476. [Google Scholar] [CrossRef]
- Radanliev, P.; De Roure, D.C.; Nicolescu, R.; Huth, M.; Montalvo, R.M.; Cannady, S.; Burnap, P. Future developments in cyber risk assessment for the internet of things. Comput. Ind. 2018, 102, 14–22. [Google Scholar] [CrossRef]
- MUmerSabir. Mumersabir/MDPIELECTRONICS: MDPI Electronics Revision Dataset.
- Svetnik, V.; Liaw, A.; Tong, C.; Culberson, J.C.; Sheridan, R.P.; Feuston, B.P. Random forest: A classification and regression tool for compound classification and QSAR modeling. J. Chem. Inf. Comput. Sci. 2003, 43, 1947–1958. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.Y.; Ying, L. Decision tree methods: Applications for classification and prediction. Shanghai Arch. Psychiatry 2015, 27, 130. [Google Scholar] [PubMed]
- Korkmaz, M.; Güney, S.; YİĞİTER, Ş. The importance of logistic regression implementations in the Turkish livestock sector and logistic regression implementations/fields. Harran Tarım ve Gıda Bilimleri Dergisi 2012, 16, 25–36. [Google Scholar]
- Leung, K.M. Naive bayesian classifier. Polytech. Univ. Dep. Comput. Sci. Risk Eng. 2007, 2007, 123–156. [Google Scholar]
- Ribeiro, A.A.; Sachine, M. On the optimal separating hyperplane for arbitrary sets: A generalization of the SVM formulation and a convex hull approach. Optimization 2020, 1–14. [Google Scholar] [CrossRef]
- Xu, B.; Shirani, A.; Lo, D.; Alipour, M.A. Prediction of relatedness in stack overflow: Deep learning vs. SVM: A reproducibility study. In Proceedings of the 12th ACM/IEEE International Symposium on Empirical Software Engineering and Measurement, Oulu, Finland, 11–12 October 2018; pp. 1–10. [Google Scholar]
- Wang, H.; Gu, J.; Wang, S. An effective intrusion detection framework based on SVM with feature augmentation. Knowl.-Based Syst. 2017, 136, 130–139. [Google Scholar] [CrossRef]
- Tao, P.; Sun, Z.; Sun, Z. An improved intrusion detection algorithm based on GA and SVM. IEEE Access 2018, 6, 13624–13631. [Google Scholar] [CrossRef]
- Siddique, K.; Akhtar, Z.; Khan, F.A.; Kim, Y. KDD cup 99 data sets: A perspective on the role of data sets in network intrusion detection research. Computer 2019, 52, 41–51. [Google Scholar] [CrossRef]
- Tavallaee, M.; Bagheri, E.; Lu, W.; Ghorbani, A.A. A detailed analysis of the KDD CUP 99 data set. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence for Security and Defense Applications, Ottawa, ON, Canada, 8–10 July 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–6. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attack | Common Cybersecurity Threats | Threats Identified Citations | Countermeasures Citations |
|---|---|---|---|
| Protocol-based Attacks | Security of Communication Link | [5,15,18,19] | [18] |
| Data Confidentiality Protection | [10] | ||
| Replay Arrack | [20,21] | [22] | |
| Privacy Leakage | [5,10] | ||
| De-authentication Attack | [4,15] | ||
| Sensors based Attacked | GPS Spoofing/Jamming Attack | [13,23,24] | [25,26] |
| Motion Sensors Spoofing | [27] | [28] | |
| UAV Spoofing/Jamming Attack | [13] | ||
| Compromised Component | IoT Security Threats | [13,29] | |
| Control/Data Interception | [13,19] | ||
| Jammers | Denial of Service | [4,13,15] | |
| Stop Packet Delivery | [17] | [17] |
| Sr. No | Attacks | Security Technique | Machine Learning Solution |
|---|---|---|---|
| 1 | Jamming | Secure Offloading | Q-learning [43,45] DQN [48] |
| 2 | Denial of Service | Secure Offloading | Neural Networks [45] Multivariate Correlation Analysis [49] Q-learning [50] |
| 3 | Malware | Access Control | Q/Dyna-Q/PDS [51] K-nearest neighbors [52] Random Forest [52] |
| 4 | Intrusion | Access Control | Naive Bayes [44] Support Vector Machine [44] Neural Network [53] K-NN [54] |
| 5 | Spoofing | Authentication | SVM [55] DNN [56] Dyna-Q [57] Q-learning [57] |
| 6 | Traffic blockage | Authentication | Q-learning [43] |
| Class | Description |
|---|---|
| Normal | Connections are generated by simulating user behavior. |
| DoS Attack | Use of resources or services is denied to authorized users. |
| Prob Attack | Information about the system is exposed to unauthorized entities. |
| User to Remote attacks | Access to account types of administrator is gained by unauthorized entities. |
| Remote to local attacks | Access to hosts is gained by unauthorized entities. |
| Evaluation Metric | Formula |
|---|---|
| Accuracy | |
| Precision | |
| Recall | |
| F1-Score | 2* |
| Models | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|
| Random Forest | 99.09% | 99.71% | 99.68% | 99.69% |
| Decision Tree | 99.05% | 99.07% | 99.18% | 99.12% |
| Logistic Regression | 99.35% | 99.28% | 99.28% | 99.28% |
| Naïve Bayes | 96.27% | 97.23% | 96.88% | 97.05% |
| Support Vector Machine | 99.07% | 99.07% | 99.18% | 99.12% |
| MLP | 98.46% | 98.67% | 98.18% | 98.42% |
| LRRF | 99.99% | 99.99% | 99.99% | 99.99% |
| Methods | Dataset | Accuracy |
|---|---|---|
| Proposed (LR + RF) | Drone Dataset | 99.99% |
| Proposed (LR + RF) | KDD CUP 99 | 99.99% |
| Proposed (LR + RF) | NSL-KDD | 99.99% |
| PCA + MCA [58] | KDD CUP 99 | 94.20% |
| Deep neural model [59] | KDD CUP 99 | 92.49% |
| DT-RFE [60] | KDD CUP 99 | 99.21% |
| SVM-ANN [61] | NSL-KDD | 91.48% |
| Deep Hierarchical Model [62] | NSL-KDD | 83.58% |
| DT-RFE [60] | NSL-KDD | 99.23% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majeed, R.; Abdullah, N.A.; Faheem Mushtaq, M.; Umer, M.; Nappi, M. Intelligent Cyber-Security System for IoT-Aided Drones Using Voting Classifier. Electronics 2021, 10, 2926. https://doi.org/10.3390/electronics10232926
Majeed R, Abdullah NA, Faheem Mushtaq M, Umer M, Nappi M. Intelligent Cyber-Security System for IoT-Aided Drones Using Voting Classifier. Electronics. 2021; 10(23):2926. https://doi.org/10.3390/electronics10232926
Chicago/Turabian StyleMajeed, Rizwan, Nurul Azma Abdullah, Muhammad Faheem Mushtaq, Muhammad Umer, and Michele Nappi. 2021. "Intelligent Cyber-Security System for IoT-Aided Drones Using Voting Classifier" Electronics 10, no. 23: 2926. https://doi.org/10.3390/electronics10232926
APA StyleMajeed, R., Abdullah, N. A., Faheem Mushtaq, M., Umer, M., & Nappi, M. (2021). Intelligent Cyber-Security System for IoT-Aided Drones Using Voting Classifier. Electronics, 10(23), 2926. https://doi.org/10.3390/electronics10232926