
A Study on the Detecting Cycle Slips and a Repair Algorithm for B1/B3


Abstract
:1. Introduction
2. Cycle Slips Detection Methods
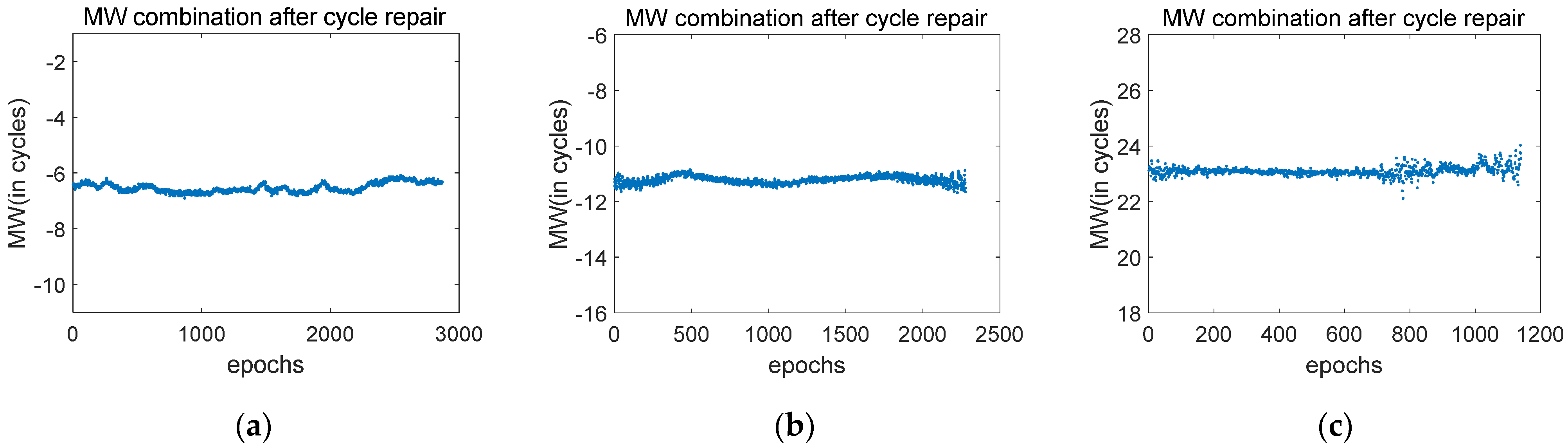
2.1. MW Combination Method
2.2. GF Combination Method
2.3. TurboEdit Method
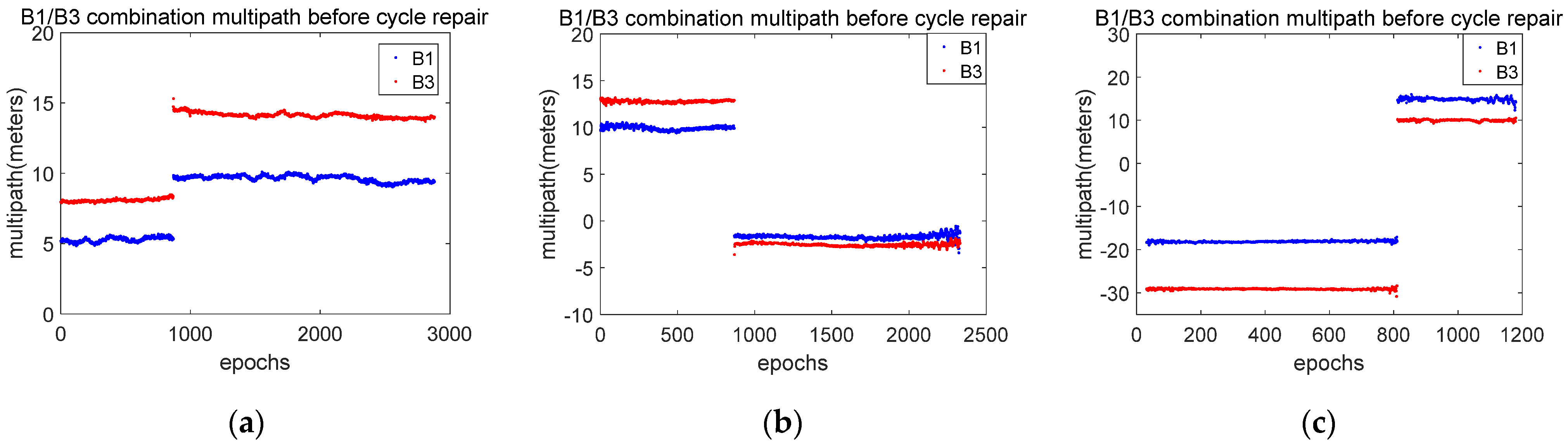
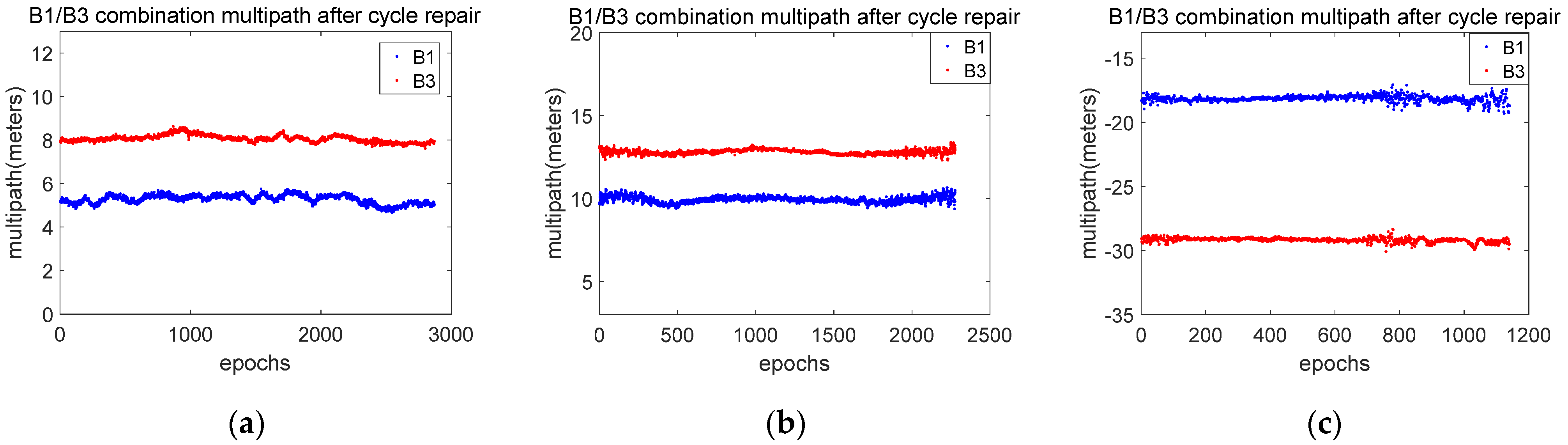
2.4. Code Multipath Observation
3. Experimental Design
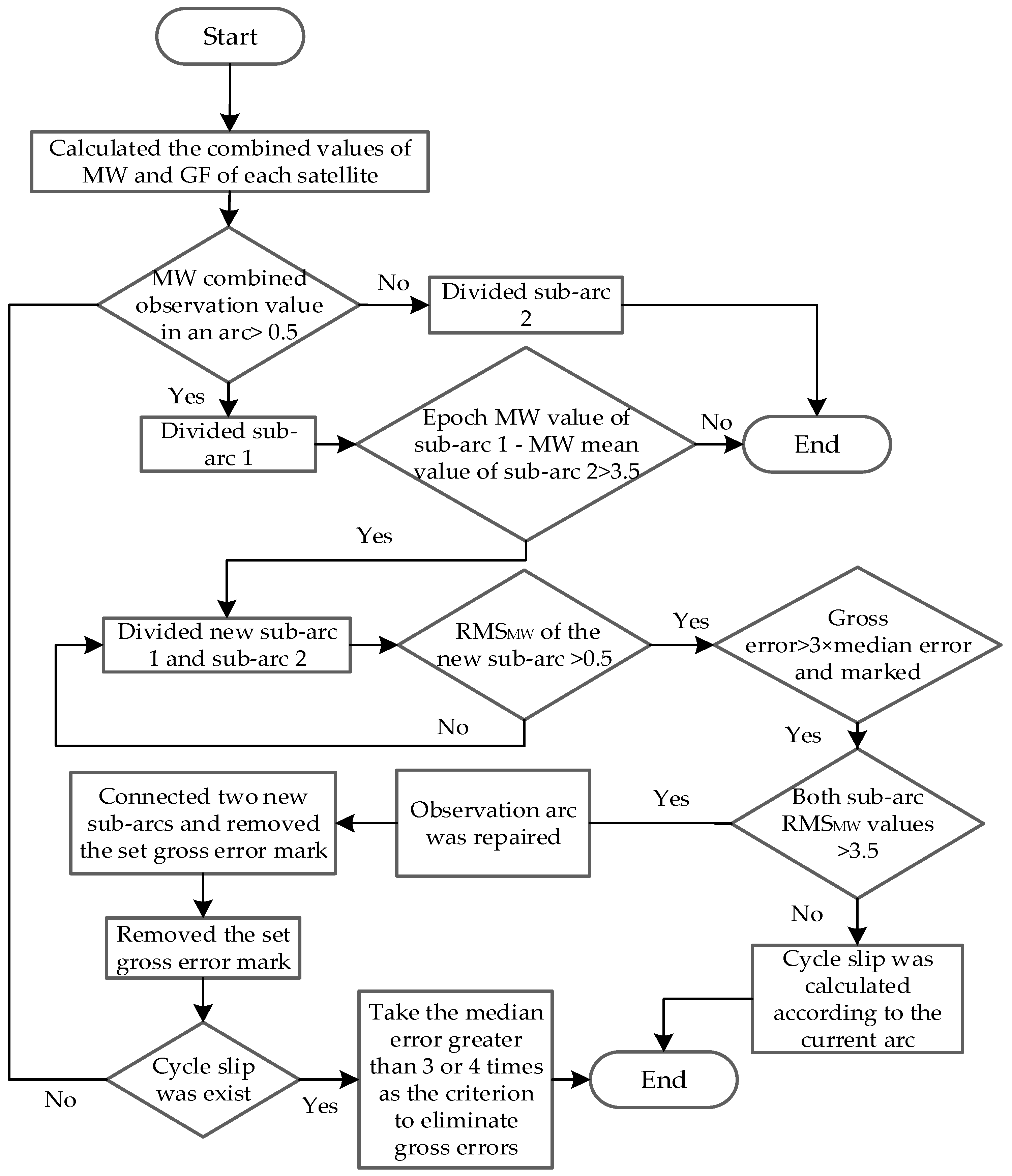
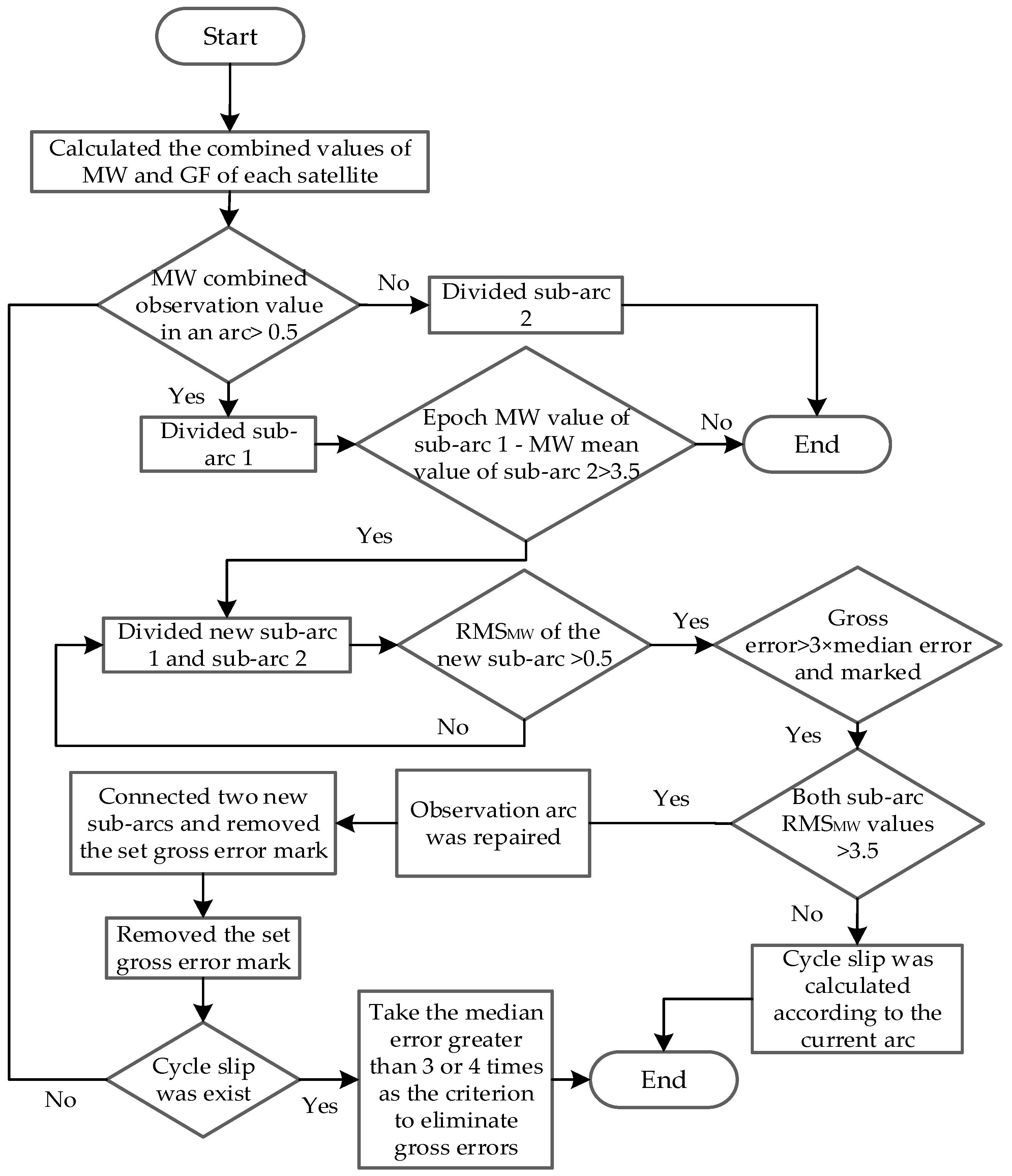
- The observation arc was divided into two sub-arcs of equal length. The sub-arc with larger RMS containing the cycle slips was called sub-arc 1, and the other arc, which did not contain cycle slips or contained a smaller cycle slip, was called sub-arc 2;
- Starting from the end close to sub-arc 2, all epochs in sub-arc 1 were traversed. If the difference between the value of a certain epoch and the mean value of sub-arc 2 was greater than the MW combined cycle slip determination threshold of 3.5, the cycle slip was considered to have occurred at this epoch.
- The epoch of the cycle slip was taken to be the dividing point, and the observation arc was divided into two new sub-arcs. If the RMS of the new sub-arc was greater than the threshold of 0.5, then the gross error was marked with a median error greater than three times the standard value. It was possible that the RMS of the arc was exceeded due to a cycle slip that had not yet been detected.
- If both values of the arcs exceeded the limit by more than 3.5, the cycle slip of the first segment was calculated first, and the entire observation arc was repaired. Otherwise, the cycle slip was calculated according to the current arc, was corrected for the entire observation arc, and two new sub-arcs were connected. The set gross error mark was removed, the RMS of the entire continuous observation arc was recalculated, and the next cycle slip was detected until all cycle slips were detected and repaired.
- Finally, as the criterion to eliminate gross errors for the entire observation arc, the median error was taken to be greater than 3 or 4 times.
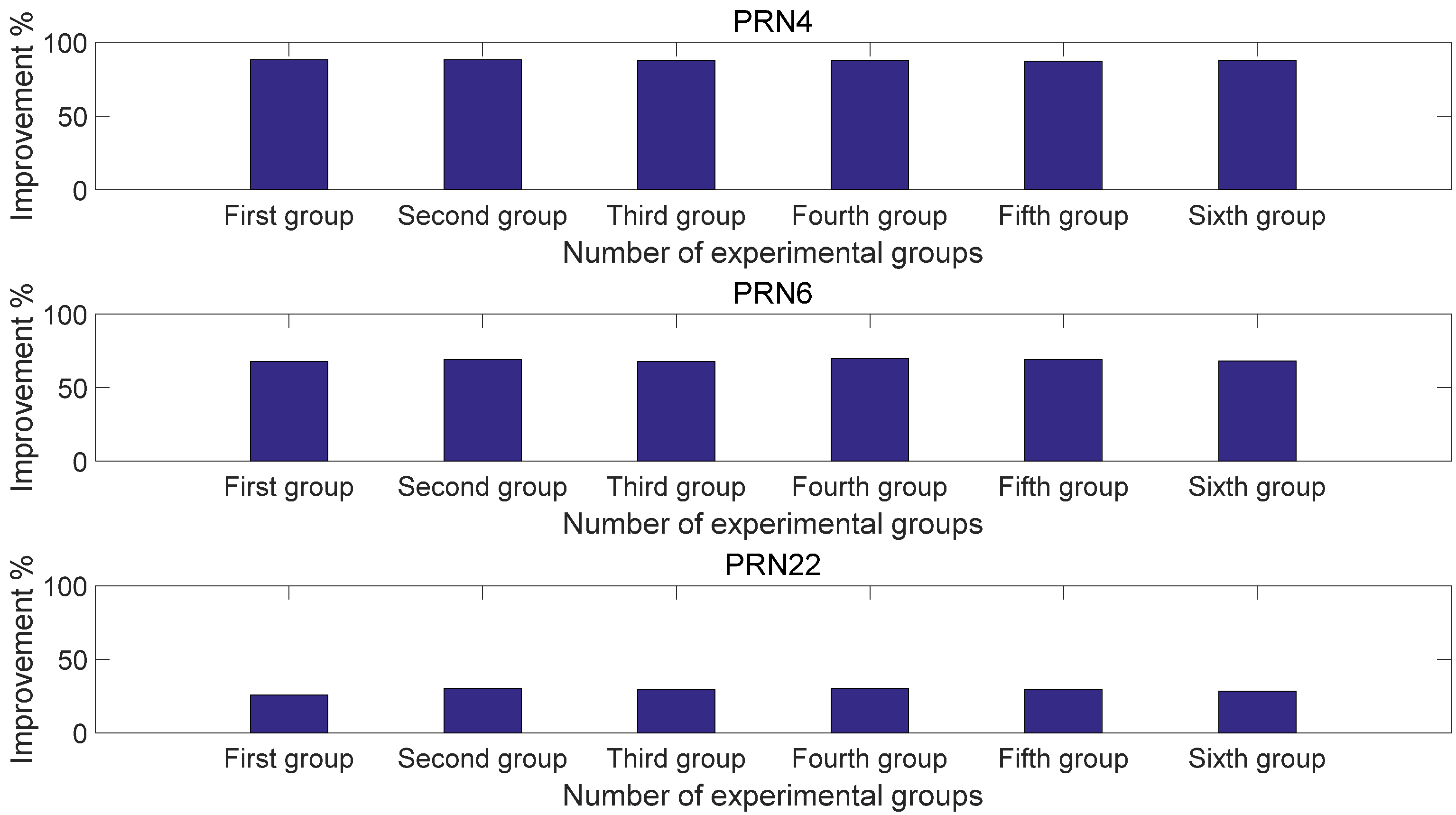
4. Experimental Results
5. Experimental Analysis
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhen, D.; Knedlik, S.; Loffeld, O. Real-Time Cycle-Slip Detection and Determination for Multiple Frequency GNSS. In Proceedings of the Workshop on Positioning, Hannover, Germany, 2 May 2008. [Google Scholar]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precisepoint Positioning for the Efficient and robust Analysis of GPS Data from Large Networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Yuan, H.; Zhang, Z.; He, X.; Xu, T.; Zang, N. Real-time cycle slip detection and repair method for BDS-3 five-frequency data. IEEE Access 2021, 99, 1. [Google Scholar] [CrossRef]
- Zhang, Y.C. Positioning of high earth orbit satellite using GPS/Beidou combined system. Chin. J. Space Sci. 2012, 36, 267–272. [Google Scholar]
- Robustelli, U.; Baiocchi, V.; Pugliano, G. Assessment of Dual Frequency GNSS Observations from a Xiaomi Mi 8 Android Smartphone and Positioning Performance Analysis. Electronics 2019, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Ke, J.; Lu, X.; Wang, X.; Chen, X.; Tang, S. Decoding Performance Analysis of GNSS Messages with Land Mobile Satellite Channel in Urban Environment. Electronics 2018, 7, 273. [Google Scholar] [CrossRef] [Green Version]
- Yu, S.; Liu, Z. The ionospheric condition and GPS positioning performance during the 2013 tropical cyclone usagi event in the hong kong region. Earth Planets Space 2021, 73, 1–16. [Google Scholar] [CrossRef]
- Sijie, L.; Xiang, Y.; Yu, W.; Wang, W. BDS-3 Triple Frequency Satellite Inter-frequency Clock Bias Estimation and Its Effects on Precise Point Positioning. In Proceedings of the China Satellite Navigation Conference (CSNC 2021), Nanchang, China, 26–28 May 2021. [Google Scholar]
- Li, D.; Dang, Y.; Yuan, Y.; Mi, J. A New Cycle-Slip Repair Method for Dual-Frequency BDS Against the Disturbances of Severe Ionospheric Variations and Pseudoranges with Large Errors. Remote Sens. 2021, 13, 1037. [Google Scholar] [CrossRef]
- Chen, X.H.; Tian, H.; Wang, T. Research on cycle slip detection and repair method of BDS/ GPS dual-difference combined data. Sci. Surv. Mapp. 2020, 45, 33–40. [Google Scholar]
- Cai, C.; Liu, Z.; Xia, P.; Dai, W. Cycle slip detection and repair for undifferenced GPS observations under high ionospheric activity. GPS Solut. 2012, 17, 247–260. [Google Scholar] [CrossRef]
- Zheng, Z.Y.; Cheng, Z.Y.; Huang, C.; Lu, X.S. Improving of Cycle Slip Detection and Correction of Blewitt Method. Acta Astron. Sin. 2005, 46, 216–224. [Google Scholar]
- Gan, Y.; Sui, L.; Guo, B.Q.; Wen, J. Improving the performance of mw combined observation on cycle slip detection using emd threshold de-noising. J. Geomat. Sci. Technol. 2015, 35, 666–670. [Google Scholar]
- Wang, G.; Jong, K.D.; Li, X.; Zhao, Q.; Guo, J. Analysis of characteristics of BDS observable combinations for wide-lane integer ambiguity resolution. In China Satellite Navigation Conference (CSNC), 2014, Proceedings; Springer: Berlin/Heidelberg, Germany, 2014; pp. 411–425. [Google Scholar]
- Qian, N.; Gao, J.; Li, Z.; Li, F.; Pan, C. GPS/BDS triple-frequency cycle slip detection and repair algorithm based on adaptive detection threshold and FNN-derived ionospheric delay compensation. Acta Geodyn. Geomater. 2020, 17, 141–156. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Yao, Y. Research on Cycle Slip Detection Methods for Un-difference disc GPS Data. J. Geod. Geodyn. 2012, 32, 101–104. [Google Scholar]
- Wang, W.; Wang, J.X.; Gao, J.Q. Cycle Slip Detection of GPS Data. Geomat. Inf. Sci. Wuhan Univ. 2010, 35, 667–690. [Google Scholar]
- Feng, W.; Zhao, Y.; Zhou, L.; Huang, D.; Hassan, A. Fast cycle slip determination for high-rate multi-GNSS RTK using modified geometry-free phase combination. GPS Solut. 2020, 24, 42. [Google Scholar] [CrossRef]
- Wang, L.X.; Gan, Y.; Sui, L.F. INS-aided single-frequency cycle-slip detection for kinematic GNSS. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 364–370. [Google Scholar]
- Ju, B.; Gu, D.; Chang, X.; Herring, T.; Duan, X.; Wang, Z. Enhanced cycle slip detection method for dual-frequency BeiDou GEO carrier phase observations. GPS Solut. 2017, 21, 1227–1238. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, X.; Guo, J.; Xia, Y.; Chang, X. An enhanced method for detecting and repairing the cycle slips of dual-frequency onboard GPS receivers of LEO satellites. J. Sens. 2020, 17, 1–17. [Google Scholar] [CrossRef]
- Liu, C.; Tao, Y.; Xin, H.; Zhao, X.; Zhou, T. A single-difference multipath hemispherical map for multipath mitigation in BDS-2/BDS-3 short baseline positioning. Remote Sens. 2021, 13, 304. [Google Scholar] [CrossRef]
- Tao, Y.; Liu, C.; Liu, C.; Zhao, X.; Hu, H.; Xin, H. Joint time–frequency mask and convolutional neural network for real-time separation of multipath in GNSS deformation monitoring. GPS Solut. 2021, 25, 1–13. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
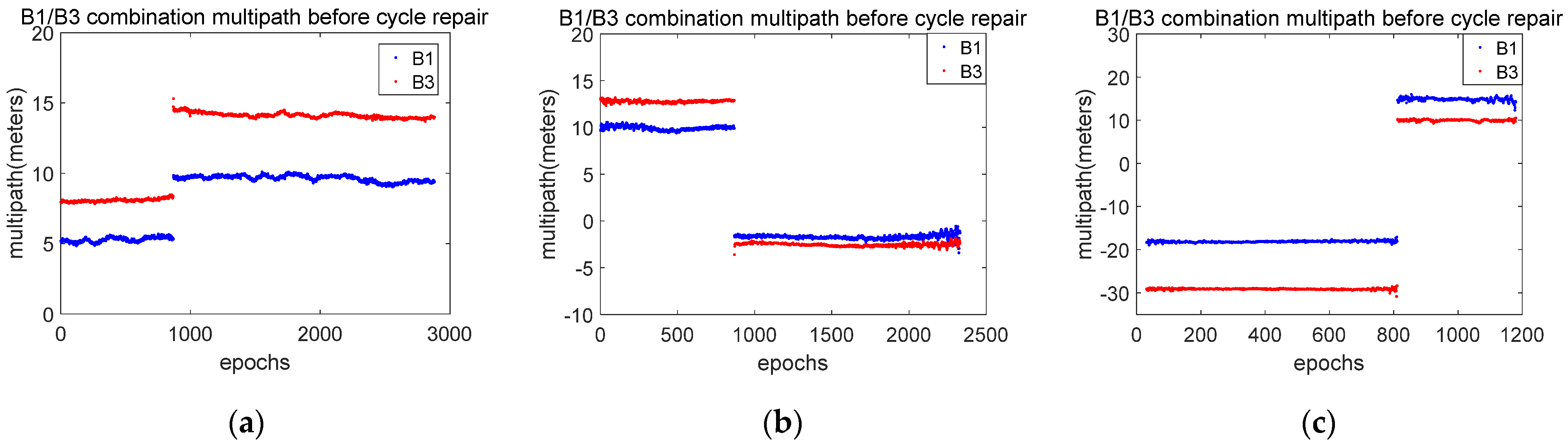
| PRN | Epoch | Value Jump (Meters) | Code Multipath STD Value (Meters) before Cycle Slips Were Repaired | Code Multipath STD Value (Meter) after Cycle Slips Were Repaired | |||
|---|---|---|---|---|---|---|---|
| B1I | B3I | B1I | B3I | B1I | B3I | ||
| 4 | 868th | 4.4029 | 6.3651 | 2.0085 | 2.7807 | 0.2029 | 0.1607 |
| 6 | 868th | 11.6586 | 16.466 | 5.6354 | 7.4093 | 0.1855 | 0.1366 |
| 22 | 822th | 32.7067 | 38.5714 | 15.4003 | 18.2627 | 0.2428 | 0.1721 |
| PRN | 4 | 6 | 22 |
|---|---|---|---|
| STD value of Method 1 (s) | 0.0074 | 0.0102 | 0.0107 |
| STD value of Method 2 (s) | 0.0028 | 0.0021 | 0.0045 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; Dai, P.; Wang, S.; Xing, J.; Xue, Y.; Liu, S.; Han, S.; Yang, Z.; Bai, X. A Study on the Detecting Cycle Slips and a Repair Algorithm for B1/B3. Electronics 2021, 10, 2925. https://doi.org/10.3390/electronics10232925
Dong Y, Dai P, Wang S, Xing J, Xue Y, Liu S, Han S, Yang Z, Bai X. A Study on the Detecting Cycle Slips and a Repair Algorithm for B1/B3. Electronics. 2021; 10(23):2925. https://doi.org/10.3390/electronics10232925
Chicago/Turabian StyleDong, Yanchen, Peipei Dai, Sen Wang, Jianping Xing, Yulei Xue, Shijie Liu, Shuai Han, Zhi Yang, and Xinchao Bai. 2021. "A Study on the Detecting Cycle Slips and a Repair Algorithm for B1/B3" Electronics 10, no. 23: 2925. https://doi.org/10.3390/electronics10232925
APA StyleDong, Y., Dai, P., Wang, S., Xing, J., Xue, Y., Liu, S., Han, S., Yang, Z., & Bai, X. (2021). A Study on the Detecting Cycle Slips and a Repair Algorithm for B1/B3. Electronics, 10(23), 2925. https://doi.org/10.3390/electronics10232925