
Geometric Midpoint Algorithm for Device-Free Localization in Low-Density Wireless Sensor Networks


Abstract
:
1. Introduction
- We propose a GM algorithm that can achieve accurate localization when the density of wireless network is , much lower than the network density in conventional GF scheme [10]. The proposed algorithm uses the distance-weighted geometric midpoint of the segments with endpoints, which are the intersection points formed by the intersection of the links in the wireless network to estimate the position of the target. The algorithm can be applied to resource-limited scenarios
- We proposed an effective wireless link detection method that can detect the fluctuations caused by targets correctly, especially in indoor environments wherein the multipath effect is severe. As this is the first step of the proposed GM scheme, it makes important contributions to the final system tracking accuracy
2. Related Works
3. Proposed GM Algorithm
3.1. Detection of the Triggered Links
3.2. Intersection-Point Algorithm
| Algorithm 1 Intersection Point Algorithm |
| Input: The two links and . |
| Output: The intersection points if it exists. |
| 1. Calculate direction vector and using Equation (6). |
| 2. Calculate normal vector and using Equation (7). |
| 3. Calculate the projection of , , , , and using Equations (8) and (9). |
| 4. if = 0 and then |
| 5. , |
| 6. , |
| 7. if then |
| 8. return |
| 9. else |
| 10. return Figure 4c |
| 11. end |
| 12. else if then |
| 13. |
| 14. |
| 15. return Figure 4d–f |
| 16. else |
| 17. return Figure 4a,b |
| 18. end |
3.3. Build Segments of Links
| Algorithm 2 Calculate intersection point and segments of links |
| Input: The set of all the links L |
| Output: The set of all the links L with segments information |
| 1. Initialize and for each link L to the empty set. |
| 2. for all links in L do |
| 3. for all links in L, do |
| 4. Solve the intersection point using Algorithm 1. |
| 5. if then |
| 6. |
| 7. |
| 8. end |
| 9. end |
| 10. end |
| 11. for all links in L do |
| 12. |
| 13. Sort the points in set by x-axis coordinate. |
| 14. for all links point in do |
| 15. Build new segment using . |
| 16. |
| 17. end |
| 18. end |
3.4. Compute the Segment Midpoint
3.5. Distance-Based Weights
3.6. Generation of Location Estimates
| Algorithm 3 Geometric midpoint algorithm for DFL |
| 1. Calculate the segments of among all the links in the network using Algorithm 2. |
| 2. After the initialization of network, collect the raw RSS data and store in . |
| 3. for do |
| 4. Apply sliding window filter using Equations (1)–(3). |
| 5. Determine the triggered links using Equation (4). |
| 6. Generate the set of middle points using Equations (13)–(19). |
| 7. Generate the set of distance-based weights using Equations (20) and (21). |
| 8. Calculate the location estimate using Equation (22). |
| 9. end |
4. Performance Analysis and Evaluation
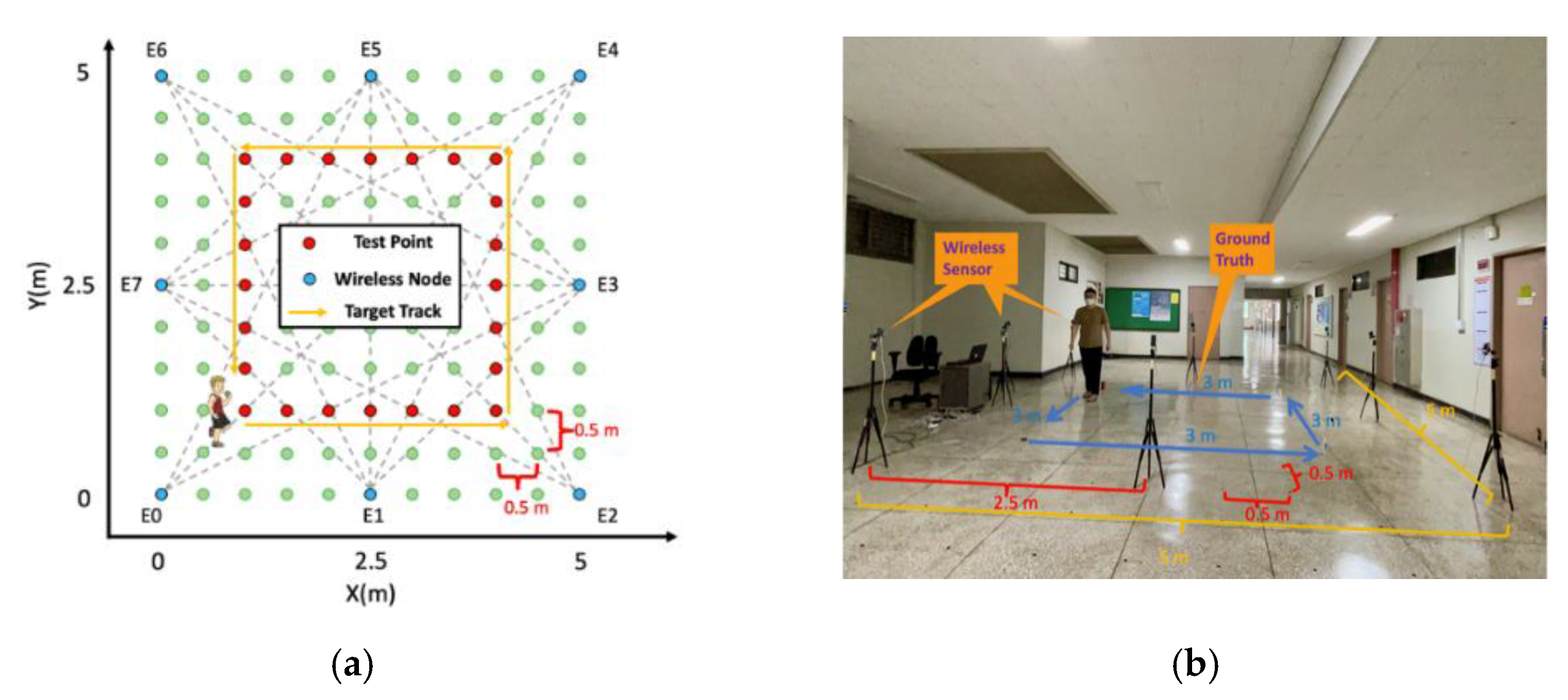
4.1. Experimental Setup
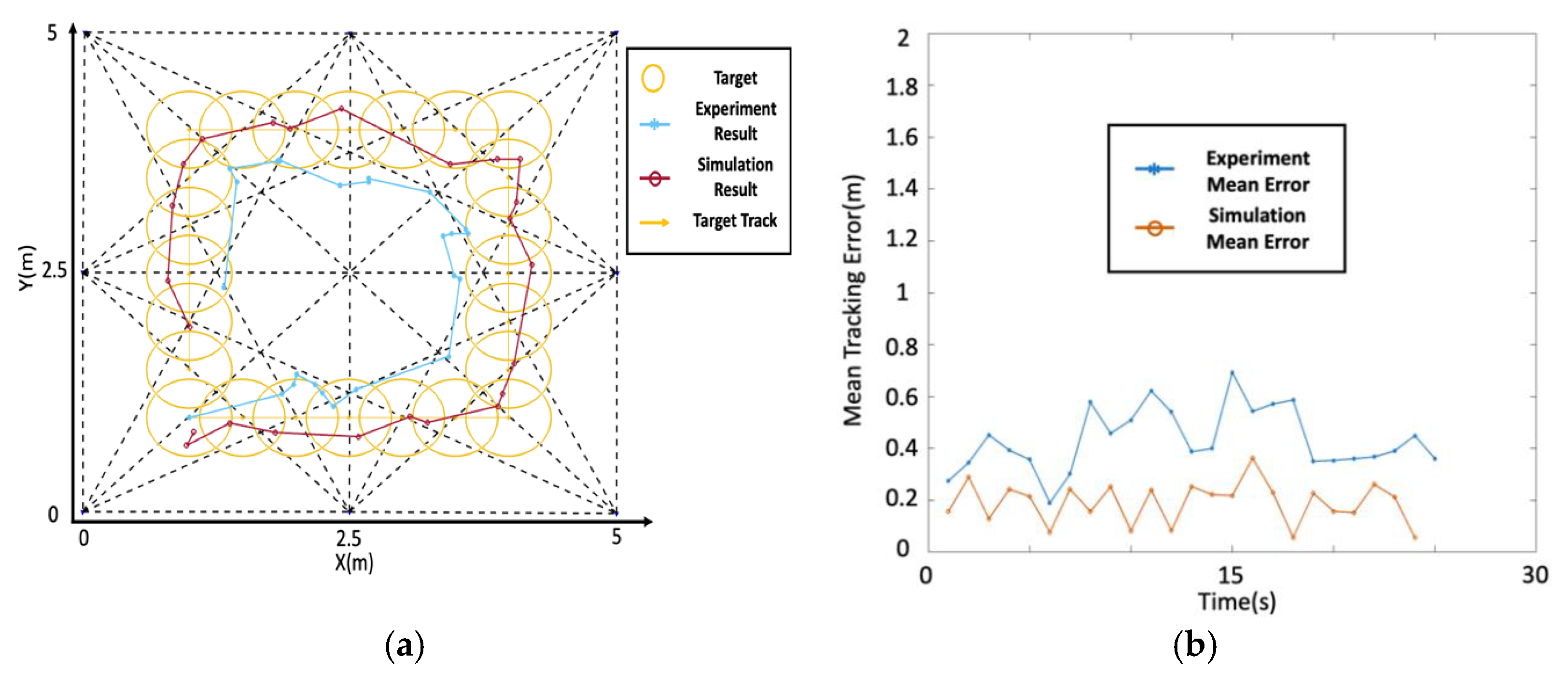
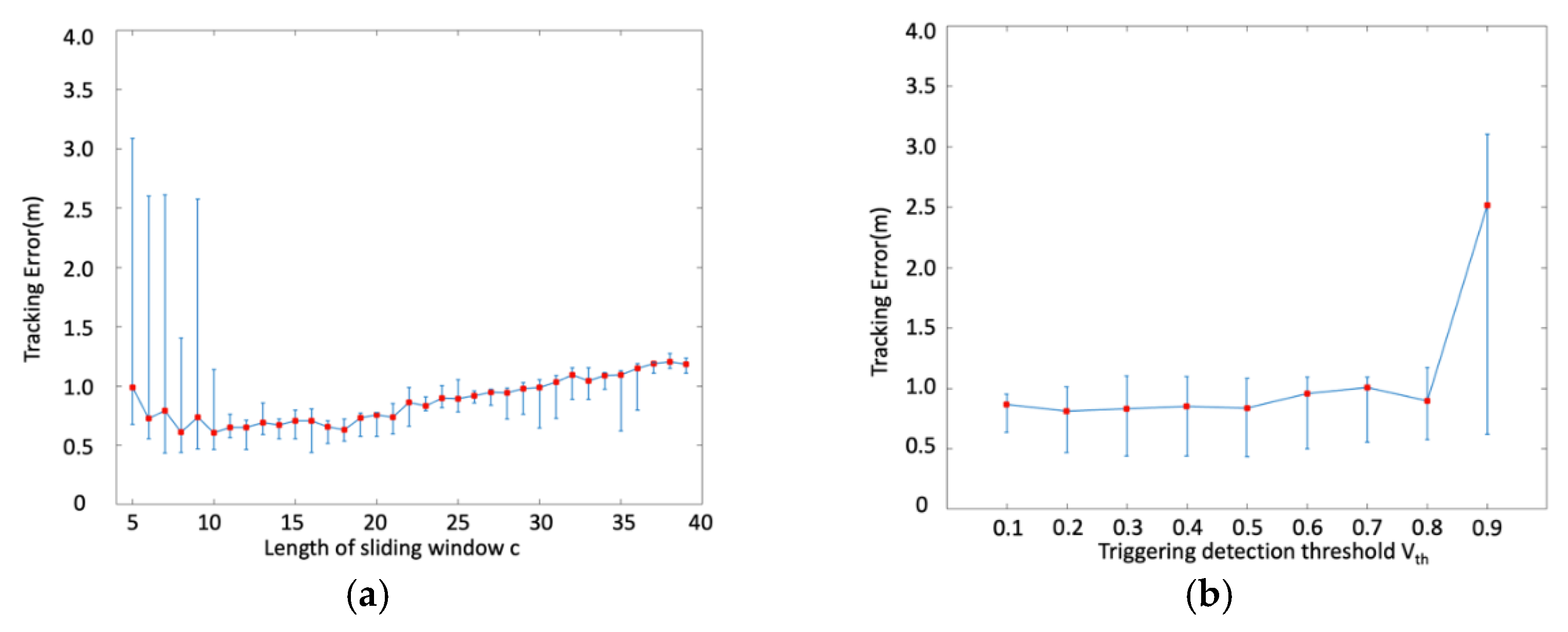
4.2. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nannuru, S.; Li, Y.; Zeng, Y.; Coates, M.; Yang, B. Radio-frequency tomography for passive indoor multitarget tracking. IEEE Trans. Mob. Comput. 2013, 12, 2322–2333. [Google Scholar] [CrossRef]
- Guo, Y.; Huang, K.; Jiang, N.; Guo, X.; Li, Y.; Wang, G. An exponential-Rayleigh model for RSS-based device-free localization and tracking. IEEE Trans. Mobile Comput. 2015, 14, 484–494. [Google Scholar] [CrossRef]
- Yang, S.; Guo, Y.; Li, N.; Lu, A. PGMP: A device-free moving object counting and localization approach in the varying environment. IEEE Wirel. Commun. Lett. 2020, 9, 1287–1290. [Google Scholar] [CrossRef]
- Zhou, B.; Ahn, D.; Lee, J.; Sun, C.; Ahmed, S.; Kim, Y. A passive tracking system based on geometric constraints in adaptive wireless sensor networks. Sensors 2018, 18, 3276. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Chao, S.; Kim, Y. Indoor 3D localization scheme based on BLE signal fingerprinting and 1D convolutional neural network. Electronics 2021, 10, 1758. [Google Scholar] [CrossRef]
- Yang, S.; Chao, S.; Kim, Y. A new rigid body localization scheme exploiting participatory search algorithm. J. Electr. Eng. Technol. 2020, 15, 2777–2784. [Google Scholar] [CrossRef]
- Park, K.; Lee, J.; Kim, Y. Deep learning-based indoor two-dimensional localization scheme using a frequency-modulated continuous wave radar. Electronics 2021, 10, 2166. [Google Scholar] [CrossRef]
- Kemper, J.; Linde, H. Challenges of passive infrared indoor localization. In Proceedings of the Positioning, Navigation and Communication, Hannover, Germany, 27 March 2008; pp. 63–70. [Google Scholar]
- Hu, W.; Tan, T.; Wang, L.; Maybank, S. A Survey on visual surveillance of object motion and behaviours. IEEE Trans. Syst. Man Cybern. Part C 2004, 34, 334–352. [Google Scholar] [CrossRef]
- Hampapur, A.; Brown, L.; Connell, J.; Ekin, A.; Haas, N.; Lu, M.; Merkl, H.; Pankanti, S. Smart video surveillance: Exploring the concept of multiscale spatiotemporal tracking. Signal Process. Magzine IEEE 2005, 22, 38–51. [Google Scholar] [CrossRef]
- Perez, P.; Vermaak, J.; Blake, A. Data fusion for visual tracking with particles. Proc. IEEE 2004, 92, 495–513. [Google Scholar] [CrossRef]
- Wang, L.; Hu, W.; Tan, T. Recent developments in human motion analysis. Pattern Recognit. 2003, 36, 585–601. [Google Scholar] [CrossRef]
- Kilic, Y.; Wymeersch, H.; Meijerink, A.; Bentum, J.M.; Scanlon, G.W. Device-free person detection and ranging in UWB networks. IEEE J. Sel. Top. Signal Process. 2014, 8, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Lei, T.; Pan, S.; Guang, Q.; Wang, K.; Yu, Y. Enhanced geometric filtering method based device-free localization with UWB wireless network. IEEE Trans. Veh. Technol. 2021, 70, 7734–7748. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. Radio tomographic imaging with wireless networks. IEEE Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef] [Green Version]
- Wilson, J.; Patwari, N. See through walls: Motion tracking using variance-based radio tomography networks. IEEE Trans. Mobile Comput. 2011, 10, 612–621. [Google Scholar] [CrossRef]
- Wilson, J.; Patwari, N. A fade level skew-Laplace signal strength model for device-free localization with wireless networks. IEEE Trans. Mobile Comput. 2012, 11, 947–958. [Google Scholar] [CrossRef] [Green Version]
- Talampas, M.; Low, K. A geometric filter algorithm for robust device-free localization in wireless networks. IEEE Trans. Ind. Inf. 2016, 12, 1670–1678. [Google Scholar] [CrossRef]
- Talampas, M.; Low, K. An enhanced geometric filter algorithm with channel diversity for device-free localization. IEEE Trans. Instrum. Meas. 2016, 65, 378–387. [Google Scholar] [CrossRef]
- Wang, J.; Gao, Q.; Cheng, P.; Yu, Y.; Xin, K.; Wang, H. Lightweight robust device-free localization in wireless networks. IEEE Trans. Ind. Electron. 2014, 61, 5681–5689. [Google Scholar] [CrossRef]
- Yang, Z.; Huang, K.; Guo, X.; Wang, G. A real-time device-free localization system using correlated RSS measurements. EURASIP J. Wirel. Commun. Netw. 2013, 2013, 186. [Google Scholar] [CrossRef] [Green Version]
- Ninnemann, J.; Schwarzbach, P.; Jung, A.; Michler, O. Device-free passive localization based on narrowband channel impulse responses. In Proceedings of the 21st International Radar Symposium (IRS), Warsaw, Poland, 5–8 October 2020. [Google Scholar]
- Zhang, R.; Jing, X.; Wu, S.; Jiang, C.; Mu, J.; Yu, F.R. Device-free wireless sensing for human detection: The deep learning perspective. IEEE Internet Things J. 2021, 8, 2517–2539. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, H.; Li, X.; Ding, S.; Zhao, H.; Han, Z. An accurate and robust approach of device-free localization with convolutional autoencoder. IEEE Internet Things J. 2019, 6, 5825–5840. [Google Scholar] [CrossRef]
- Alberto, B.; Gustavo, H.; David, M.G.; Federico, A. Recurrent model for wireless indoor tracking and positioning recovering using generative networks. IEEE Sens. J. 2020, 20, 3356–3365. [Google Scholar]
- Ma, X.; Zhao, Y.; Zhang, L.; Gao, Q.; Pan, M.; Wang, J. Practical device-free gesture recognition using WiFi signals based on metalearning. IEEE Trans. Ind. Info. 2020, 16, 228–237. [Google Scholar] [CrossRef]
- Zhou, R.; Hou, H.; Gong, Z.; Chen, Z.; Tang, K.; Zhou, B. Adaptive device-free localization in dynamic environments through adaptive neural networks. IEEE Sens. J. 2021, 21, 548–559. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Wang, C.; Ma, X.; Gao, Q.; Lin, B. Device-free human gesture recognition with generative adversarial networks. IEEE Internet Things J. 2020, 7, 7678–7688. [Google Scholar] [CrossRef]
- Yan, J.; Wan, L.; Wei, W.; Wu, X.; Zhu, W.; Lun, D. Device-free activity detection and wireless localization based on CNN using channel state information measurement. IEEE Sens. J. 2021, 21, 24482–24494. [Google Scholar] [CrossRef]
- Wang, J.; Bai, X.; Gao, Q.; Li, X.; Bi, X.; Pan, M. Multi-target device-free wireless sensing based on multiplexing mechanisms. IEEE Trans. Vehi. Tech. 2020, 69, 10242–10251. [Google Scholar] [CrossRef]
- Kaltiokallio, O.; Hostettler, R.; Patwari, N. A novel Bayesian filter for RSS-based device-free localization and tracking. IEEE Trans. Mobile Comput. 2021, 20, 780–795. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, J.; Wu, J.; Hao, J.; Qian, H. Enhancing camera-based multimodal indoor localization with device-free movement measurement using WiFi. IEEE Internet Things J. 2020, 7, 1024–1038. [Google Scholar] [CrossRef]
- Guo, Y.; Yang, S.; Li, N.; Jiang, X. Device-free localization scheme with time-varying gestures using block compressive sensing. IEEE Access 2020, 8, 88951–88960. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Min (m) | Median (m) | Mean (m) |
|---|---|---|---|
| RSS based GM | 0.4367 | 0.8603 | 0.8679 |
| RSS based GF | 0.4516 | 2.7241 | 2.6837 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, C.; Zhou, B.; Yang, S.; Kim, Y. Geometric Midpoint Algorithm for Device-Free Localization in Low-Density Wireless Sensor Networks. Electronics 2021, 10, 2924. https://doi.org/10.3390/electronics10232924
Sun C, Zhou B, Yang S, Kim Y. Geometric Midpoint Algorithm for Device-Free Localization in Low-Density Wireless Sensor Networks. Electronics. 2021; 10(23):2924. https://doi.org/10.3390/electronics10232924
Chicago/Turabian StyleSun, Chao, Biao Zhou, Shangyi Yang, and Youngok Kim. 2021. "Geometric Midpoint Algorithm for Device-Free Localization in Low-Density Wireless Sensor Networks" Electronics 10, no. 23: 2924. https://doi.org/10.3390/electronics10232924
APA StyleSun, C., Zhou, B., Yang, S., & Kim, Y. (2021). Geometric Midpoint Algorithm for Device-Free Localization in Low-Density Wireless Sensor Networks. Electronics, 10(23), 2924. https://doi.org/10.3390/electronics10232924