Leveraging a Genetic Algorithm for the Optimal Placement of Distributed Generation and the Need for Energy Management Strategies Using a Fuzzy Inference System

 ,
,  ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
2. Research Methodology
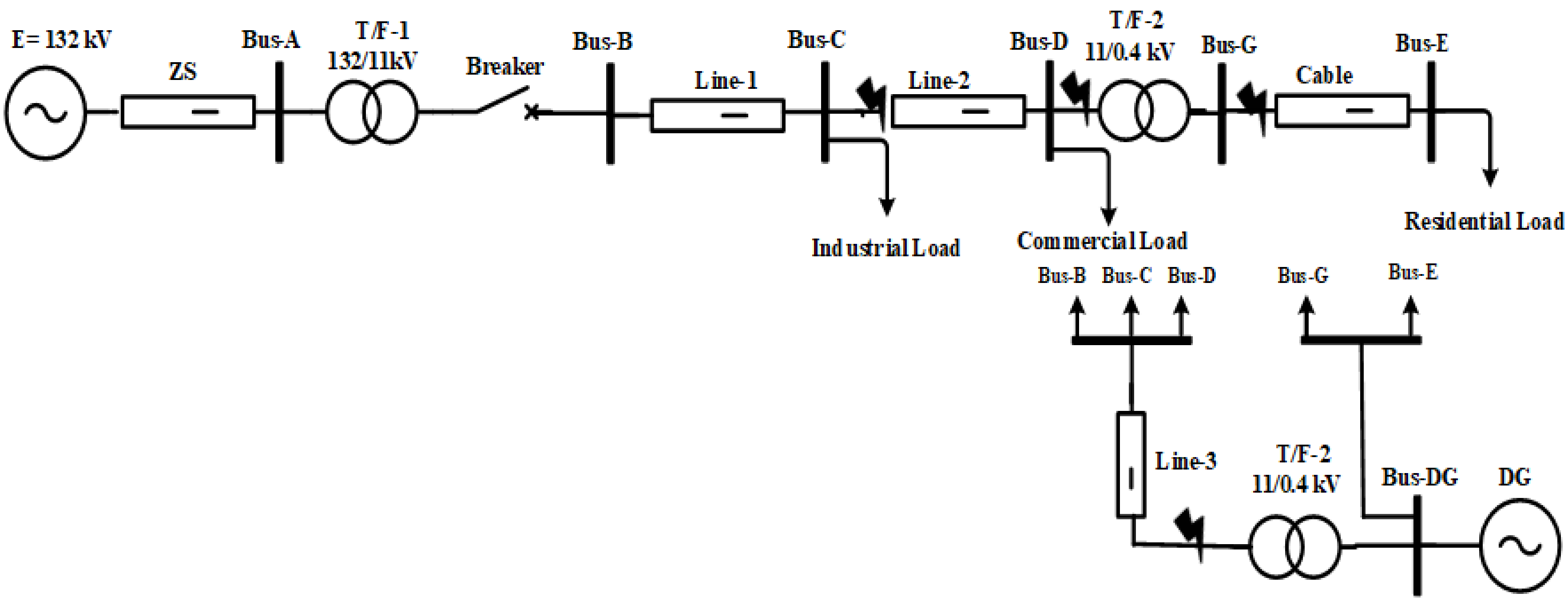
2.1. Network Characteristics
2.2. Distributed Load Flow Algorithm
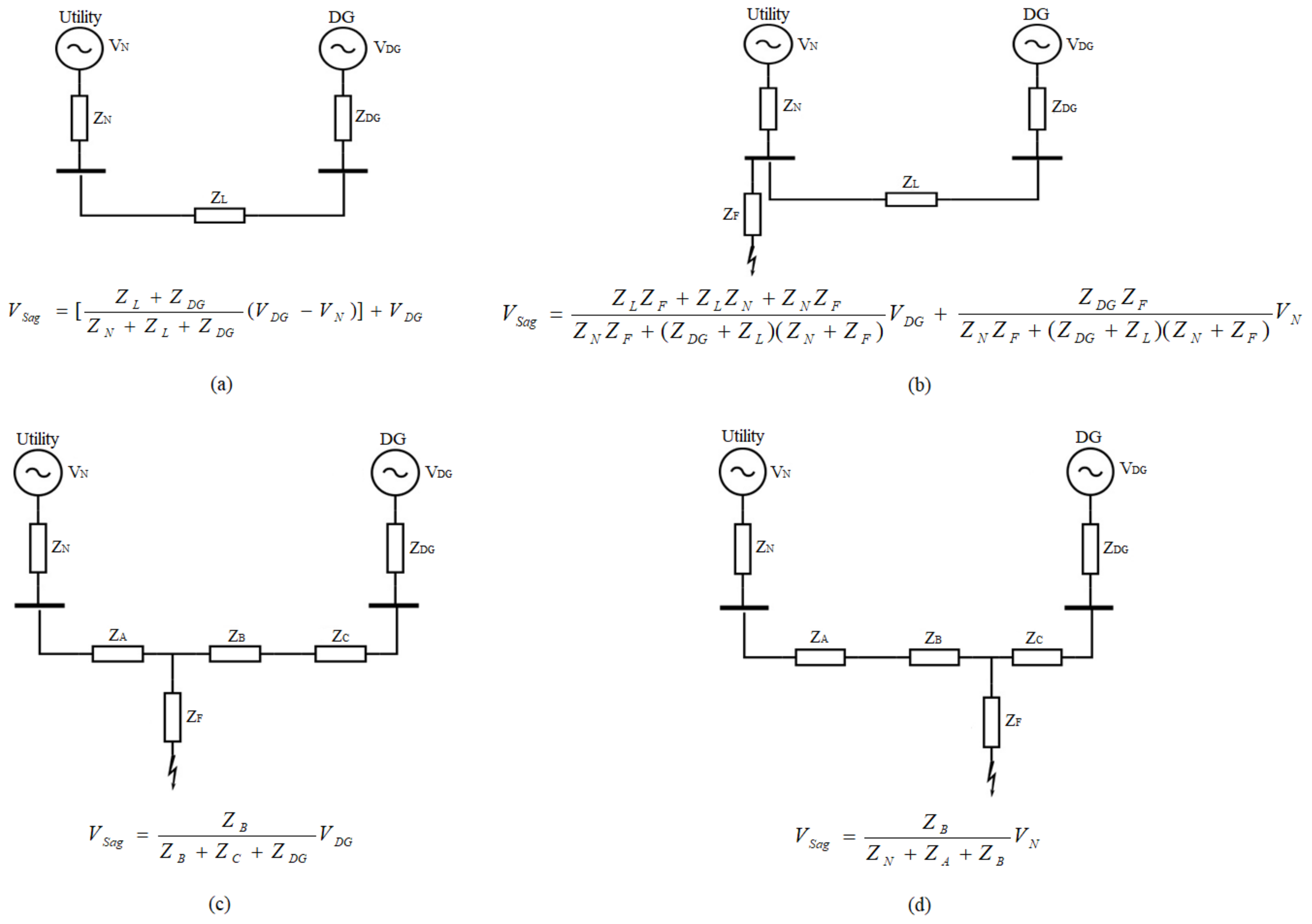
2.3. Problem Formulation
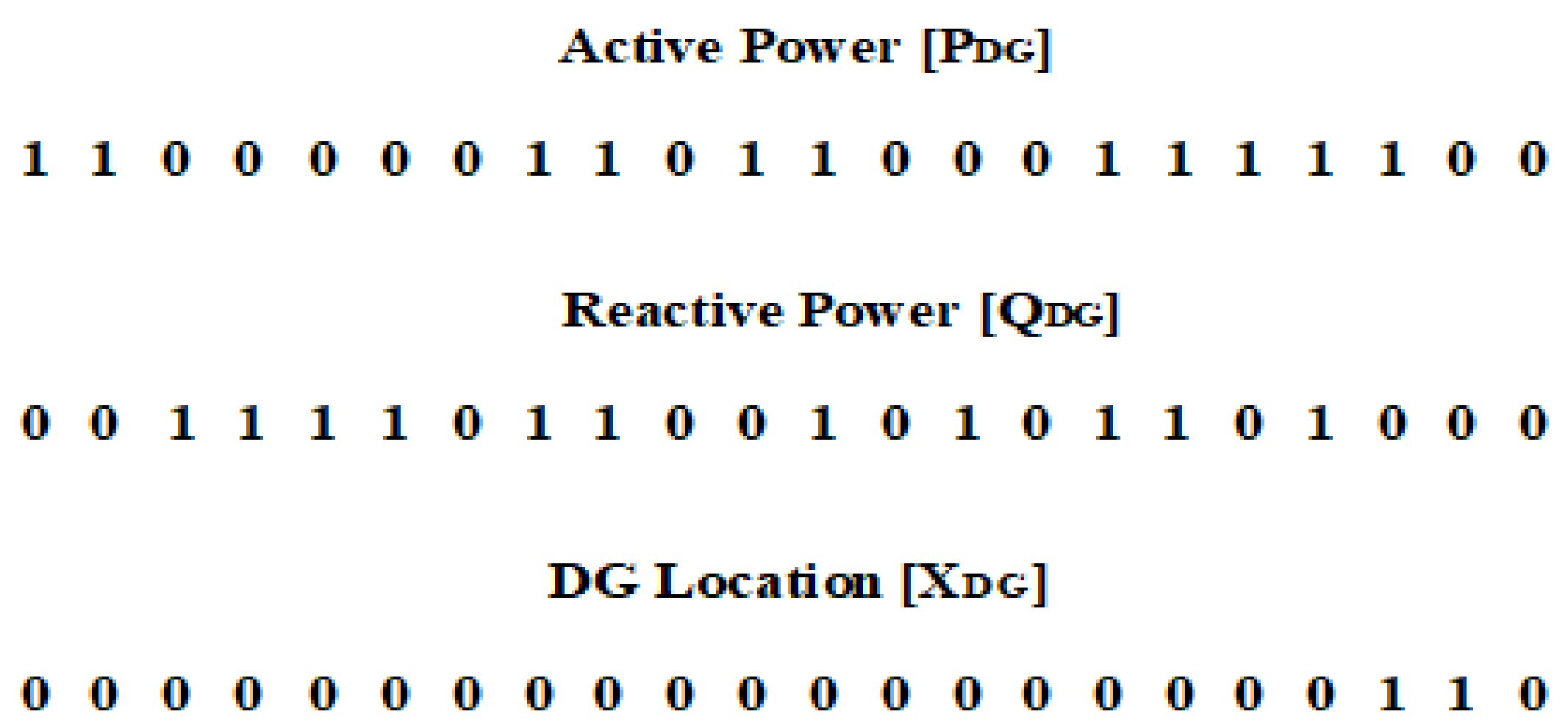
2.4. Genetic Algorithm
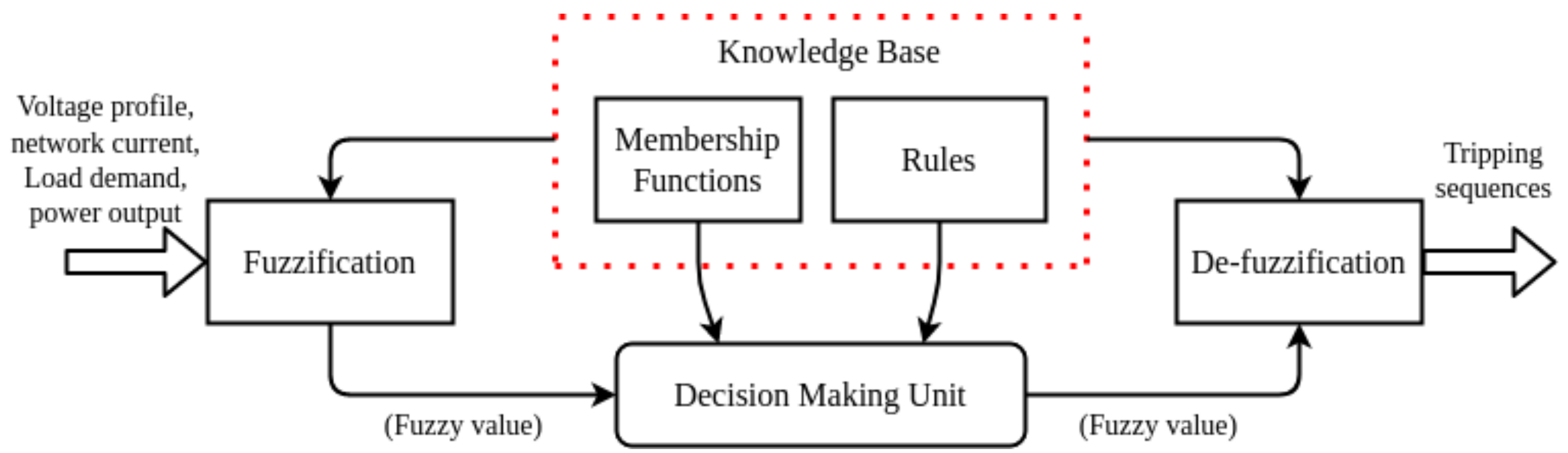
2.5. Fuzzy Inference System
| Algorithm 1: DG placement and energy management. |
 |
3. Results and Discussion
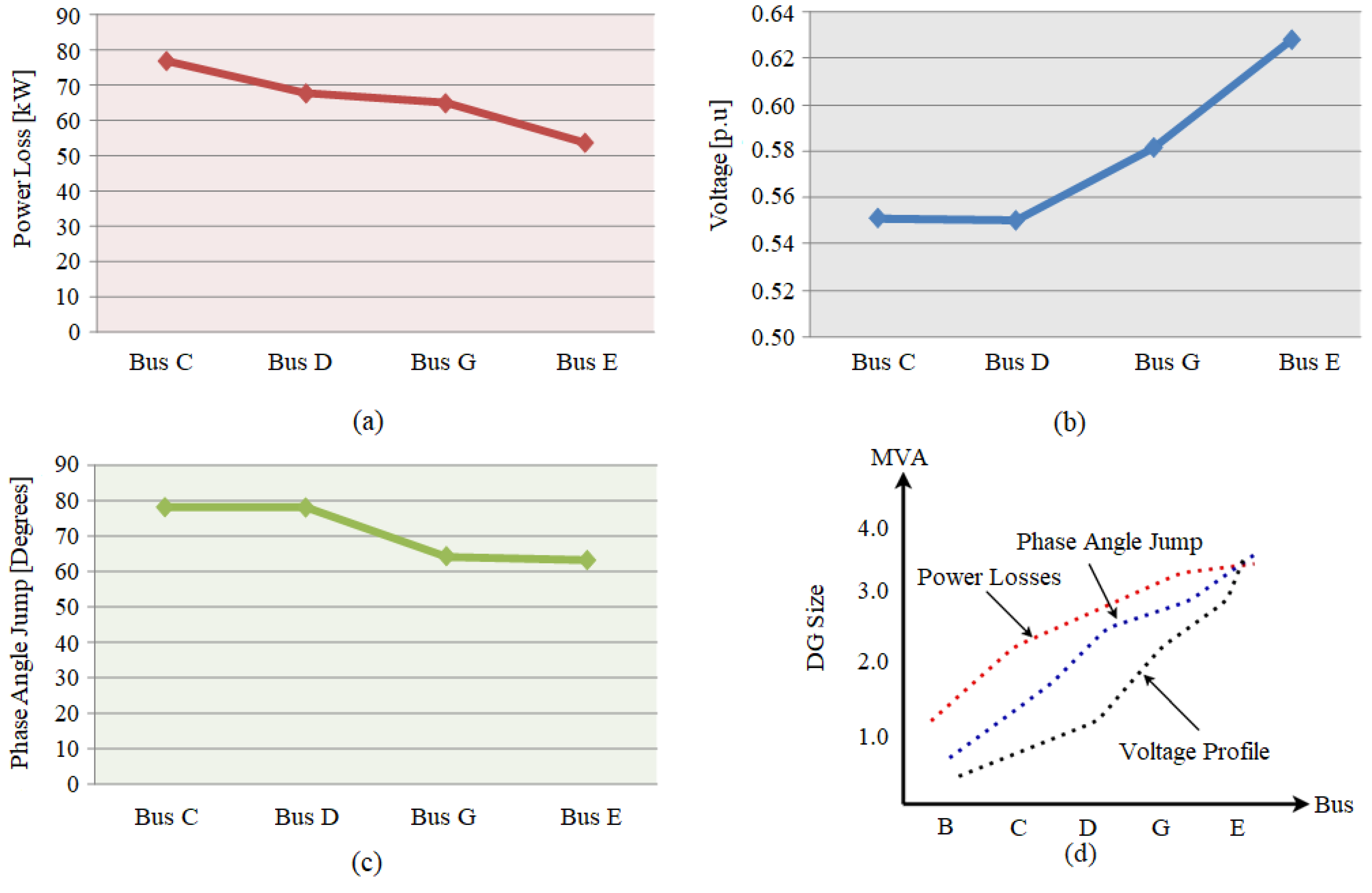
3.1. Optimal Location and Size of the DG
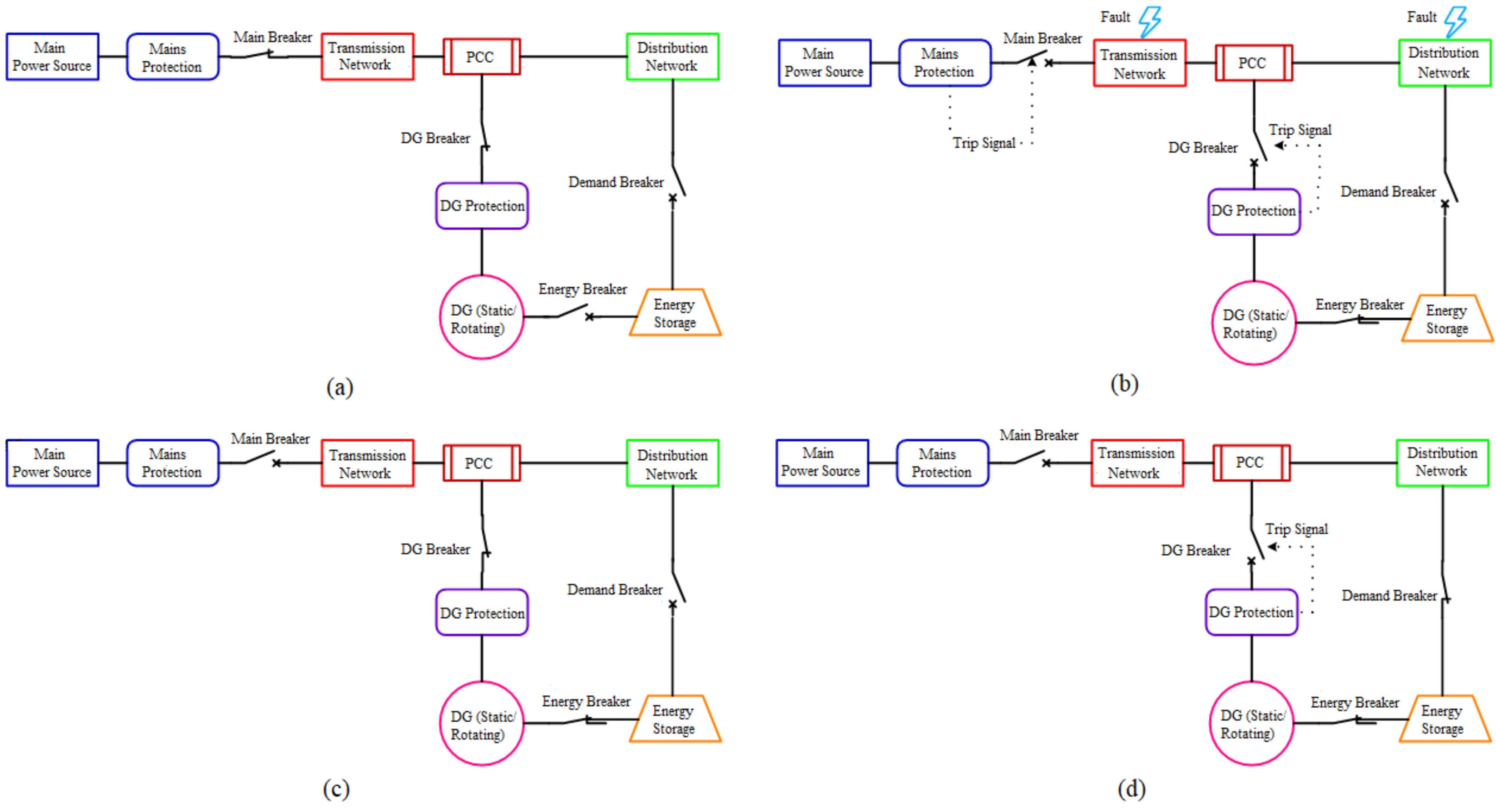
3.1.1. Normal Condition
3.1.2. Fault Condition
3.1.3. Islanding Condition
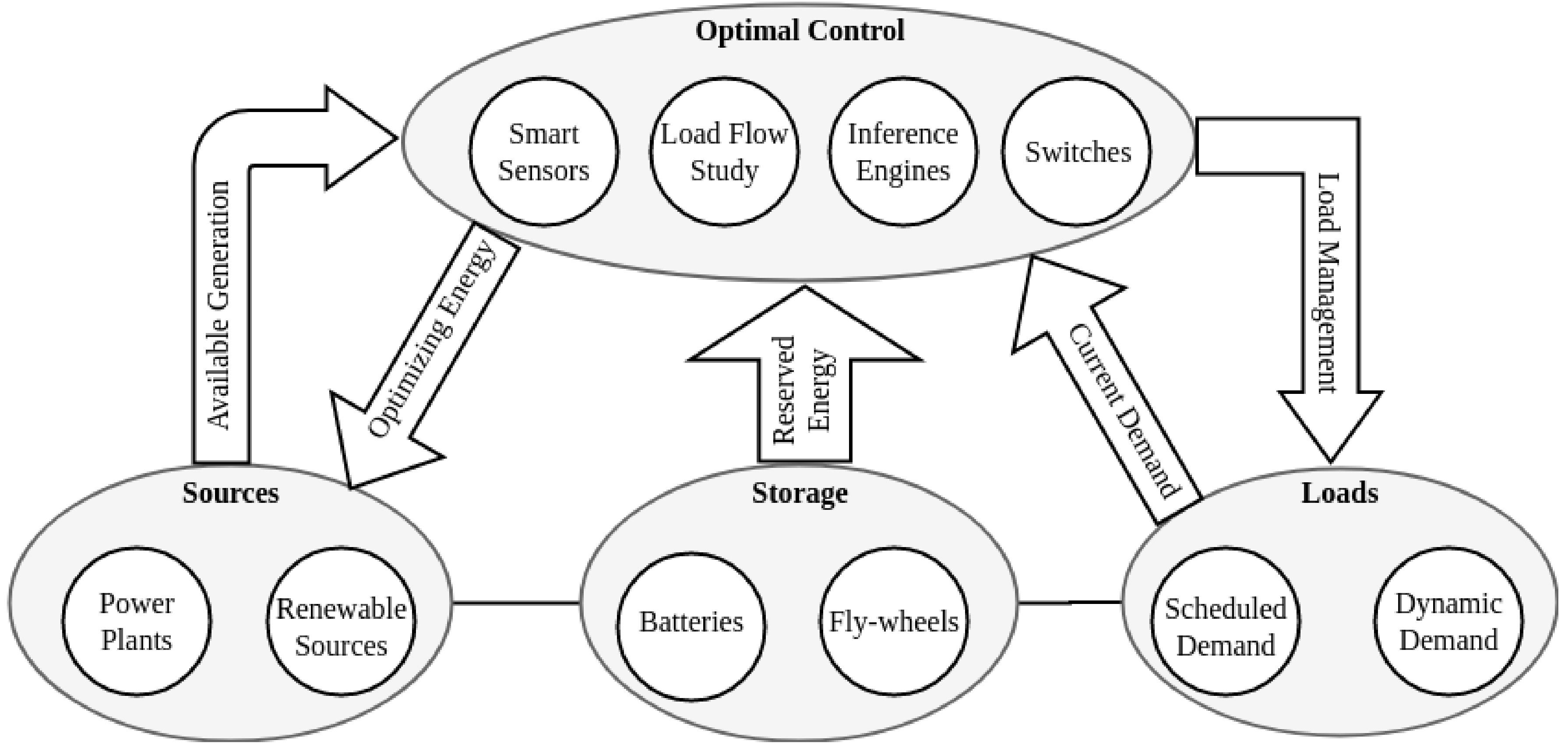
3.2. Energy Management System
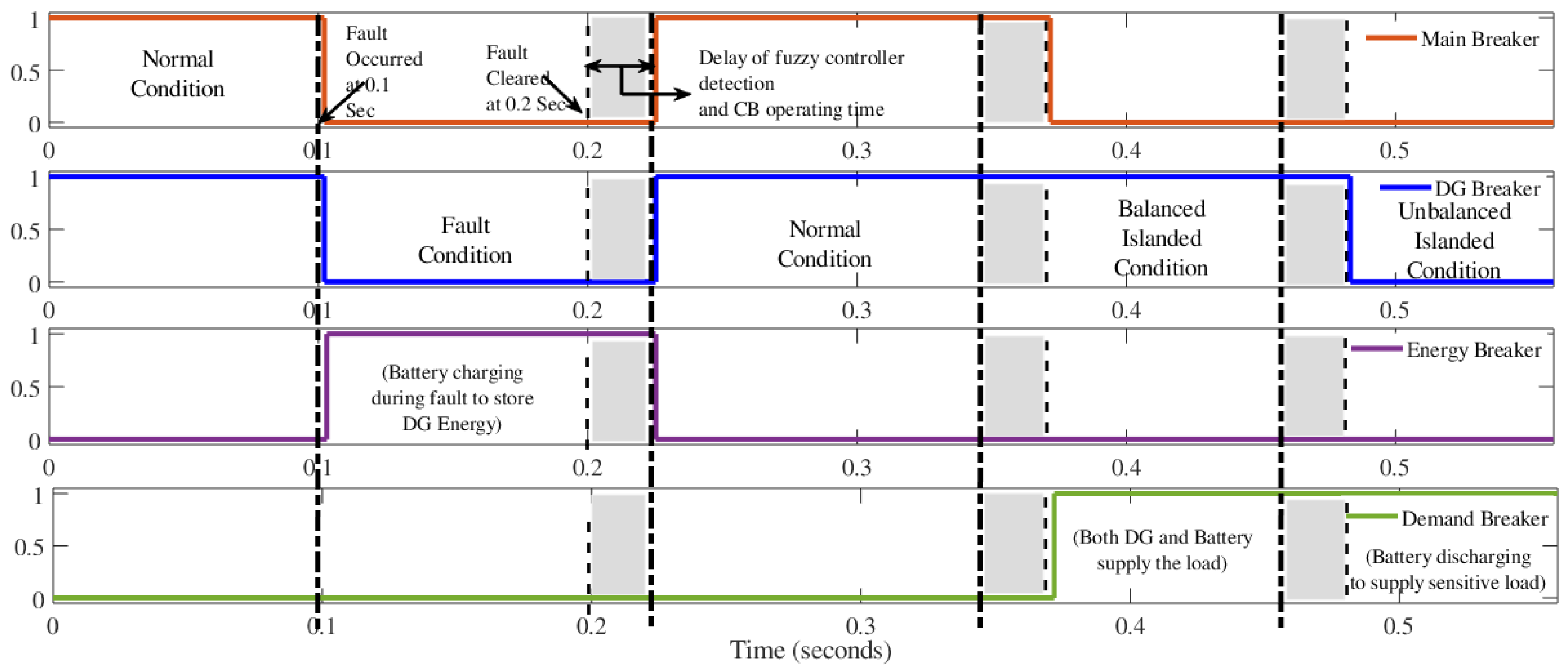
3.2.1. Normal Condition
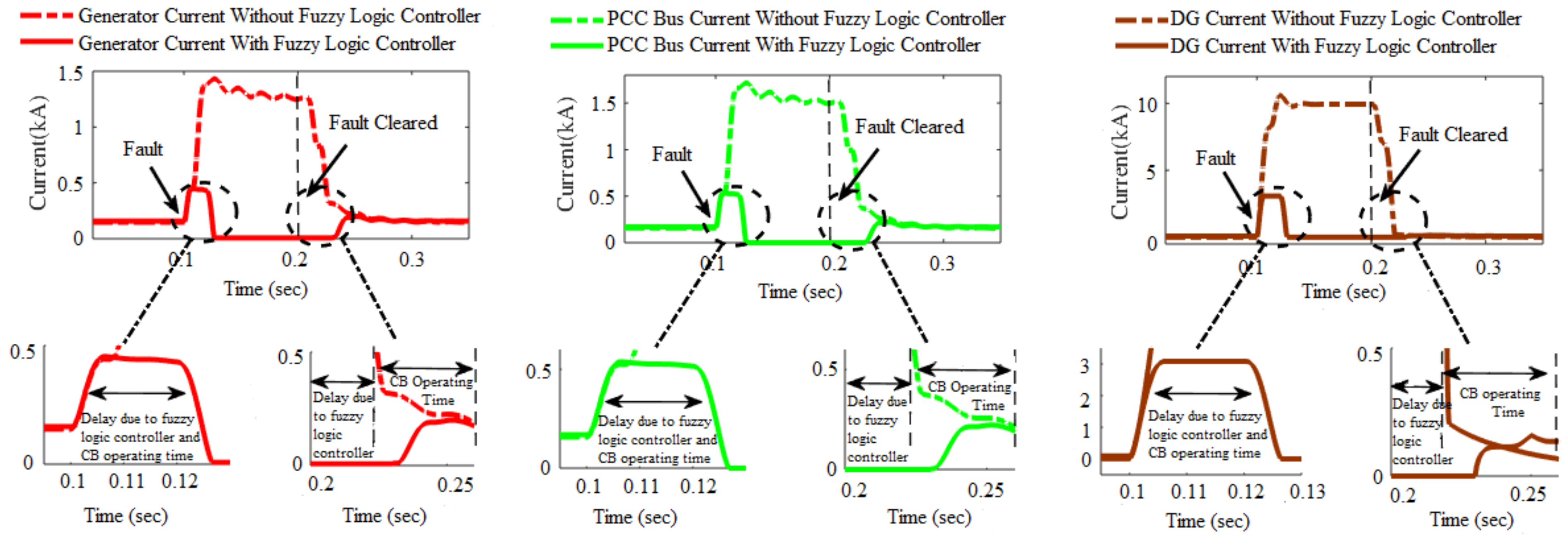
3.2.2. Fault Condition
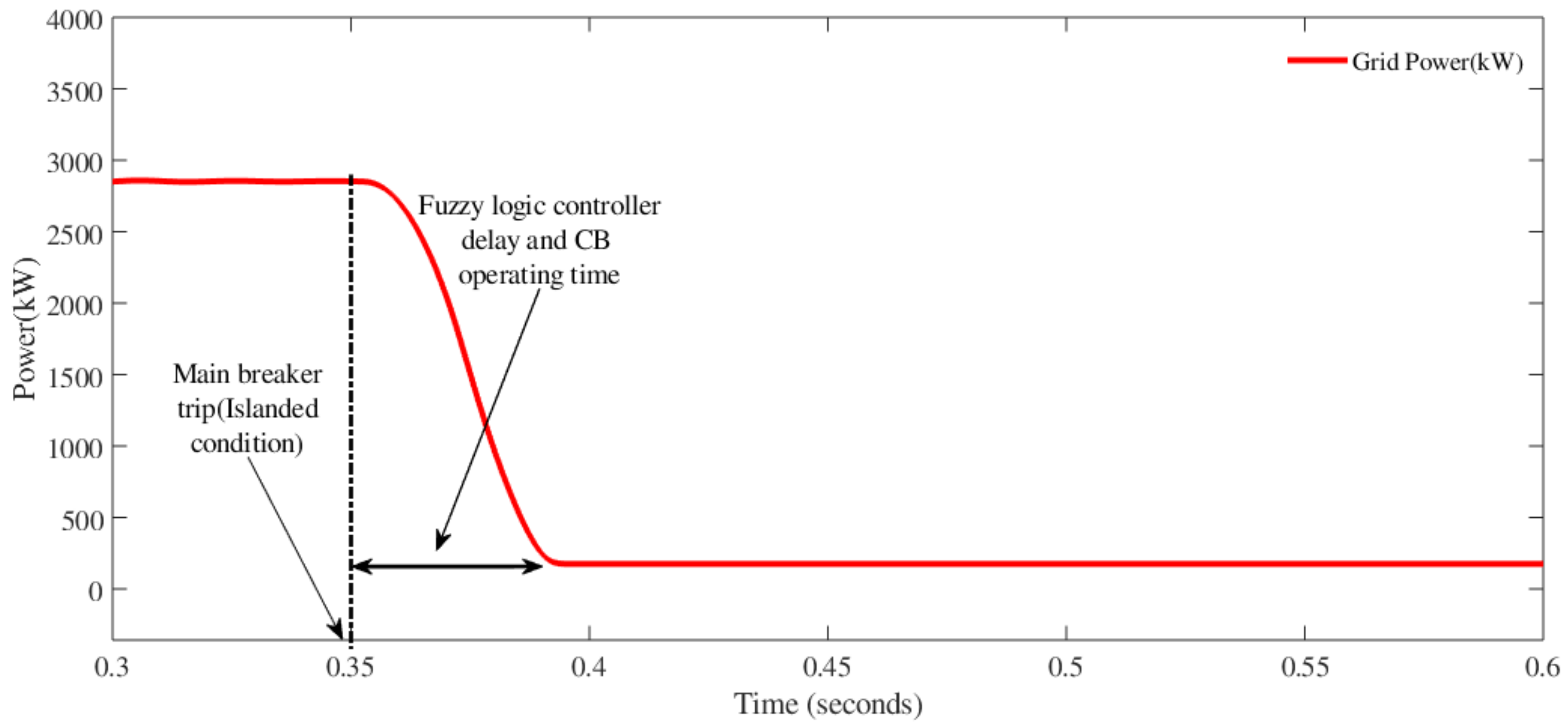
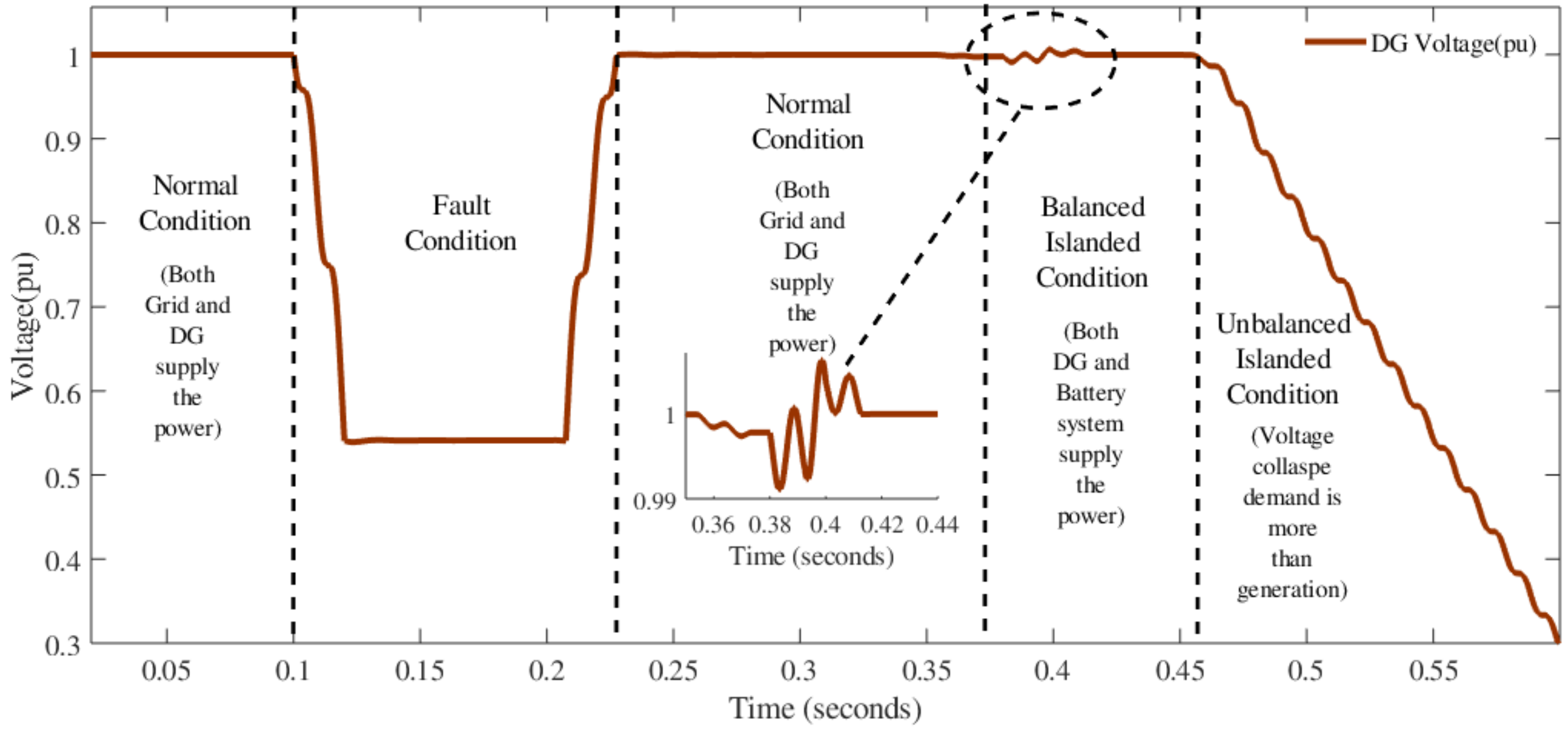
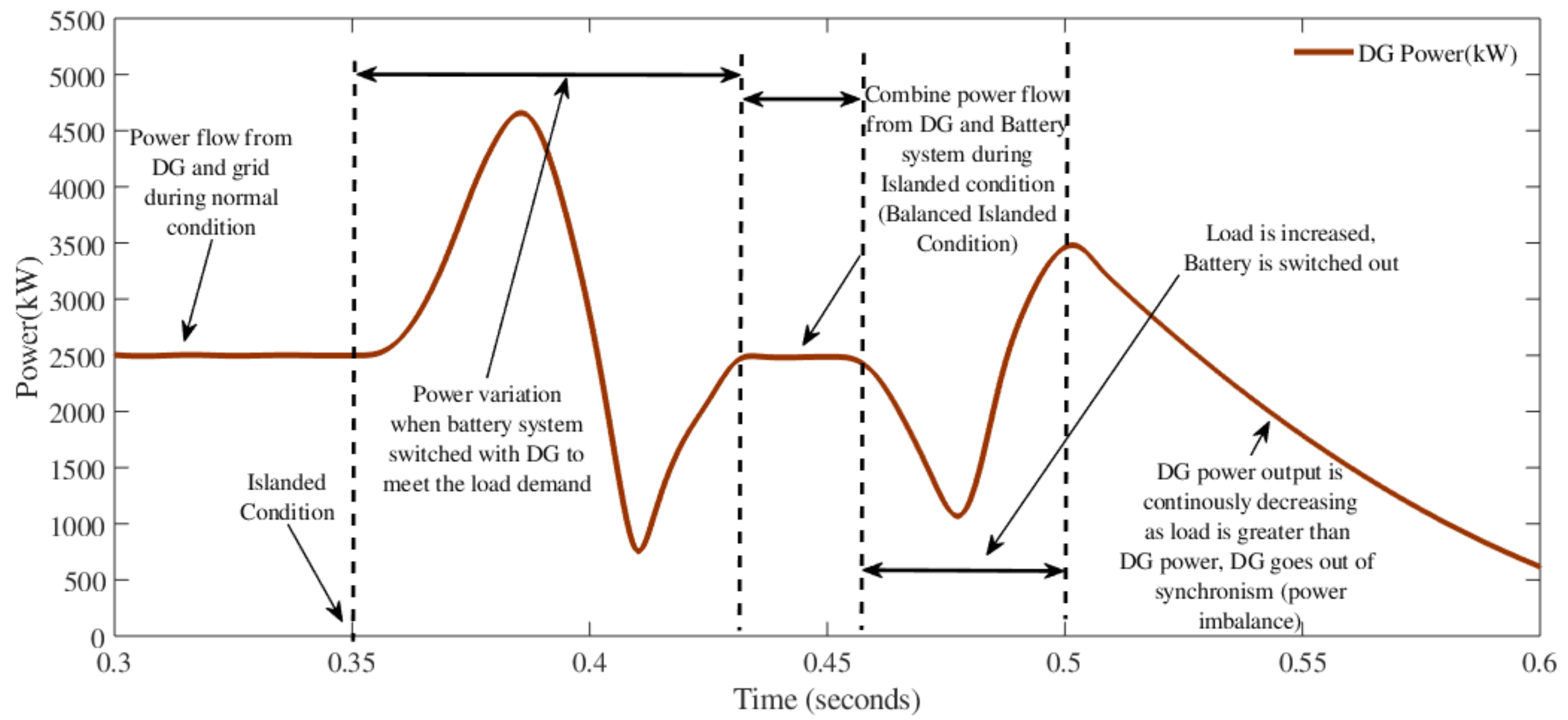
3.2.3. Islanding Condition
3.3. Comparative Analysis
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Katyara, S.; Staszewski, L.; Leonowicz, Z. Protection coordination of properly sized and placed distributed generations–methods, applications and future scope. Energies 2018, 11, 2672. [Google Scholar] [CrossRef]
- Katyara, S.; Shah, M.A.; Iżykowski, J. Power loss reduction with optimal size and location of capacitor banks installed at 132 kV grid station qasimabad Hyderabad. Present Probl. Power Syst. Control. 2016, 53–64. [Google Scholar]
- Paliwal, P.; Patidar, N.P.; Nema, R.K. Planning of grid integrated distributed generators: A review of technology, objectives and techniques. Renew. Sustain. Energy Rev. 2014, 40, 557–570. [Google Scholar] [CrossRef]
- Katyara, S.; Staszewski, L.; Chachar, F.A. Determining the Norton’s Equivalent Model of Distribution System with Distributed Generation (DG) for Stability Analysis. Recent Adv. Electr. Electron. Eng. Former. Recent Patents Electr. Electron. Eng. 2019, 12, 190–198. [Google Scholar] [CrossRef]
- Sultana, U.; Khairuddin, A.B.; Aman, M.M.; Mokhtar, A.S.; Zareen, N. A review of optimum DG placement based on minimization of power losses and voltage stability enhancement of distribution system. Renew. Sustain. Energy Rev. 2016, 63, 278–363. [Google Scholar] [CrossRef]
- Jang, S.I.; Kim, K.H. An islanding detection method for distributed generations using voltage unbalance and total harmonic distortion of current. IEEE Trans. Power Deliv. 2004, 19, 745–752. [Google Scholar] [CrossRef]
- Katyara, S.; Hashmani, A.; Chowdhary, B.S.; Musavi, H.A.; Aleem, A.; Chachar, F.A.; Shah, M.A. Wireless Networks for Voltage Stability Analysis and Anti-islanding Protection of Smart Grid System. Wirel. Pers. Commun. 2020. [Google Scholar] [CrossRef]
- Kanchev, H.; Lu, D.; Colas, F.; Lazarov, V.; Francois, B. Energy management and operational planning of a microgrid with a PV-based active generator for smart grid applications. IEEE Trans. Ind. Electron. 2011, 58, 4583–4592. [Google Scholar] [CrossRef]
- Palma-Behnke, R.; Benavides, C.; Lanas, F.; Severino, B.; Reyes, L.; Llanos, J.; Sáez, D. A microgrid energy management system based on the rolling horizon strategy. IEEE Trans. Smart Grid 2013, 4, 996–1006. [Google Scholar] [CrossRef]
- Öner, A.; Abur, A. Voltage stability based placement of distributed generation against extreme events. Electr. Power Syst. Res. 2020, 189, 106713. [Google Scholar] [CrossRef]
- Katyara, S.; Shah, M.A.; Chowdhary, B.S.; Akhtar, F.; Lashari, G.A. Monitoring, control and energy management of smart grid system via WSN technology through SCADA applications. Wirel. Pers. Commun. 2019, 106, 1951–1968. [Google Scholar] [CrossRef]
- Ogunjuyigbe, A.S.O.; Ayodele, T.R.; Akinola, O.A. Optimal allocation and sizing of PV/Wind/Split-diesel/Battery hybrid energy system for minimizing life cycle cost, carbon emission and dump energy of remote residential building. Appl. Energy 2016, 171, 153–171. [Google Scholar] [CrossRef]
- Prommee, W.; Ongsakul, W. Optimal multiple distributed generation placement in microgrid system by improved reinitialized social structures particle swarm optimization. Int. Trans. Electr. Energy Syst. 2011, 21, 489–504. [Google Scholar] [CrossRef]
- Thirugnanam, K.; Kerk, S.K.; Yuen, C.; Liu, N.; Zhang, M. Energy Management for Renewable Microgrid in Reducing Diesel Generators Usage with Multiple Types of Battery. IEEE Trans. Ind. Electron. 2018, 65, 6772–6786. [Google Scholar] [CrossRef]
- Merabet, A.; Ahmed, K.T.; Ibrahim, H.; Beguenane, R.; Ghias, A.M.Y.M. Energy Management and Control System for Laboratory Scale Microgrid Based Wind-PV-Battery. IEEE Trans. Sustain. Energy 2017, 8, 145–154. [Google Scholar] [CrossRef]
- Gözel, T.; Hocaoglu, M.H. An analytical method for the sizing and siting of distributed generators in radial systems. Electr. Power Syst. Res. 2009, 79, 912–918. [Google Scholar] [CrossRef]
- Prabha, D.R.; Jayabarathi, T. Optimal placement and sizing of multiple distributed generating units in distribution networks by invasive weed optimization algorithm. Ain Shams Eng. J. 2016, 7, 683–694. [Google Scholar] [CrossRef]
- Khalesi, N.; Rezaei, N.; Haghifam, M.-R. DG allocation with application of dynamic programming for loss reduction and reliability improvement. Int. J. Electr. Power Energy Syst. 2011, 33, 288–295. [Google Scholar] [CrossRef]
- Valencia, F.; Collado, J.; Sáez, D.; Marín, L.G. Robust energy management system for a microgrid based on a fuzzy prediction interval model. IEEE Trans. Smart Grid 2015, 7, 1486–1494. [Google Scholar] [CrossRef]
- Adhikari, S.; Sinha, N.; Dorendrajit, T. Fuzzy logic based on-line fault detection and classification in transmission line. SpringerPlus 2016, 5, 1002. [Google Scholar] [CrossRef]
- Katyara, S.; Akhtar, F.; Solanki, S.; Leonowicz, Z.; Staszewski, L. Adaptive fault classification approach using digitized fuzzy logic (dfl) based on sequence components. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I & CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–7. [Google Scholar]
- Mohsin Ajeel, K. Optimal location of a single distributed generation unit in power systems. MS&E 2018, 433, 012087. [Google Scholar]
- Gomez, J.C.; Morcos, M.M. Voltage sag and recovery time in repetitive events. IEEE Trans. Power Deliv. 2002, 17, 1037–1043. [Google Scholar] [CrossRef]
- Shukla, T.N.; Singh, S.P.; Srinivasarao, V.; Naik, K.B. Optimal sizing of distributed generation placed on radial distribution systems. Electr. Power Components Syst. 2010, 38, 260–274. [Google Scholar] [CrossRef]
- Muruganantham, B.; Gnanadass, R.; Padhy, N.P. Performance analysis and comparison of load flow methods in a practical distribution system. In Proceedings of the 2016 National Power Systems Conference (NPSC), Bhubaneswar, India, 19–21 December 2016. [Google Scholar]
- Thakur, T.; Dhiman, J. A new approach to load flow solutions for radial distribution system. In Proceedings of the 2006 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America, Caracas, Venezuela, 15–18 August 2006. [Google Scholar]
- Augugliaro, A.; Dusonchet, L.; Favuzza, S.; Ippolito, M.G.; Mangione, S.; Sanseverino, E.R. A modified genetic algorithm for optimal allocation of capacitor banks in MV distribution networks. Intell. Ind. Syst. 2015, 1, 201–212. [Google Scholar] [CrossRef]
- Heydari, G.; Gharaveisi, A.; Vali, M. New formulation for representing higher order tsk fuzzy systems. IEEE Trans. Fuzzy Syst. 2015, 24, 854–864. [Google Scholar] [CrossRef]
- Nara, K.; Hayashi, Y.; Ikeda, K.; Ashizawa, T. Application of tabu search to optimal placement of distributed generators. In Proceedings of the 2001 IEEE Power Engineering Society Winter Meeting. Conference Proceedings (Cat. No. 01CH37194), Columbus, OH, USA, 28 January–1 February 2001; Volume 2, pp. 918–923. [Google Scholar]
- Abu-Mouti, F.S.; El-Hawary, M.E. Heuristic curve-fitted technique for distributed generation optimisation in radial distribution feeder systems. IET Gener. Transm. Distrib. 2011, 5, 172–180. [Google Scholar] [CrossRef]
- Wang, L.; Singh, C. Reliability-constrained optimum placement of reclosers and distributed generators in distribution networks using an ant colony system algorithm. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 757–764. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Loss Reduction (%) | Voltage Deviation (p.u.) | Number of Iterations | Energy Imbalance (%) | Detection Period (Cycles) | Computational Time (s) |
|---|---|---|---|---|---|---|
| TS [29] | 51.47 | 0.02142 | 26 | NA | NA | 9.87 |
| ABC [30] | 53.63 | 0.03468 | 73 | NA | NA | 12.43 |
| ACO [31] | 35.55 | 0.04213 | 62 | NA | NA | 11.56 |
| Proposed Framework | 45.32 | 0.01176 | 34 | 13.28 | 2.50 | 11.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Katyara, S.; Shaikh, M.F.; Shaikh, S.; Khand, Z.H.; Staszewski, L.; Bhan, V.; Majeed, A.; Shah, M.A.; Zbigniew, L. Leveraging a Genetic Algorithm for the Optimal Placement of Distributed Generation and the Need for Energy Management Strategies Using a Fuzzy Inference System. Electronics 2021, 10, 172. https://doi.org/10.3390/electronics10020172
Katyara S, Shaikh MF, Shaikh S, Khand ZH, Staszewski L, Bhan V, Majeed A, Shah MA, Zbigniew L. Leveraging a Genetic Algorithm for the Optimal Placement of Distributed Generation and the Need for Energy Management Strategies Using a Fuzzy Inference System. Electronics. 2021; 10(2):172. https://doi.org/10.3390/electronics10020172
Chicago/Turabian StyleKatyara, Sunny, Muhammad Fawad Shaikh, Shoaib Shaikh, Zahid Hussain Khand, Lukasz Staszewski, Veer Bhan, Abdul Majeed, Madad Ali Shah, and Leonowicz Zbigniew. 2021. "Leveraging a Genetic Algorithm for the Optimal Placement of Distributed Generation and the Need for Energy Management Strategies Using a Fuzzy Inference System" Electronics 10, no. 2: 172. https://doi.org/10.3390/electronics10020172
APA StyleKatyara, S., Shaikh, M. F., Shaikh, S., Khand, Z. H., Staszewski, L., Bhan, V., Majeed, A., Shah, M. A., & Zbigniew, L. (2021). Leveraging a Genetic Algorithm for the Optimal Placement of Distributed Generation and the Need for Energy Management Strategies Using a Fuzzy Inference System. Electronics, 10(2), 172. https://doi.org/10.3390/electronics10020172