
Artificial Intelligence-Based Methods for Decision Support to Avoid Collisions at Sea




Abstract
1. Introduction
2. The Process Modeling
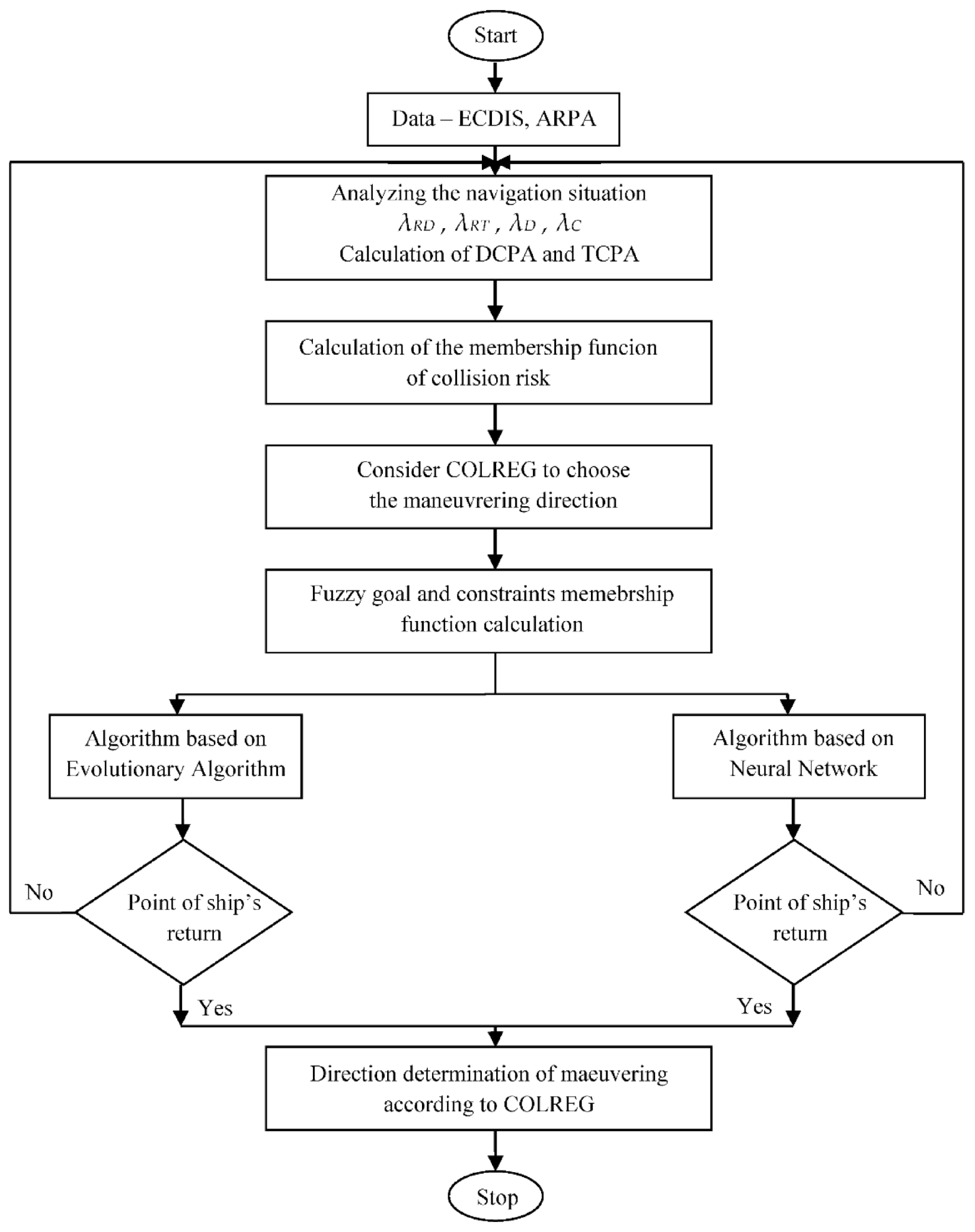
- Target tracing, based on the TCPA (time to closest point of approach) and DCPA (distance to closest point of approach), is used to assess the collision situation risk.
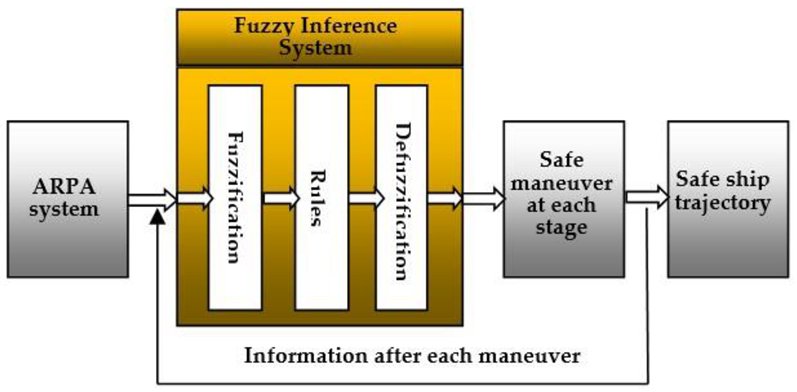
- The anticollision maneuver is executed, following the recommendations of the International Regulations for Preventing Collisions at Sea COLREG, whereby the determination of the ship’s safe trajectory in a fuzzy environment is limited to multistage decision making. The fuzzy decision allows for the evaluation of the decision quality, which can be presented by an aggregation of the fuzzy environment and objectives [46].
2.1. The Fuzzy Goal Membership Function
2.2. The Fuzzy Constraints Membership Function
2.3. The Fuzzy Collision Risk Membership Function
2.4. The Fuzzy Properties of the Ship Control Process
- I.
- It is not possible to investigate every navigational situation that may occur in the course ofa voyage. However, describing several basic situations creates the opportunity to treat any situation as the result of several basic situations (the superposition principle). Therefore, it is of great importance to investigate all eventual basic navigation situations. These situations can be classified according to the exchange angle, the difference in courses, the ship under control’s speed, the target speed, the dynamic characteristics of the ship, and the visibility criteria.
- II.
- Twelve categories were determined from all ship meetings. The surface surrounding the ship is split up into sectors following to the exchange angle. Thanks to this, one can classify all basic ship meetings based on the course and the courses between ships.
3. Algorithms
3.1. Assumptions about EA in Multistage Fuzzy Control—ACEA
- The problem is represented by the sequence of controls and, due to the relief of the algorithm and the simplification of the analysis of the results, the ship under control’s speed is assumed to be constant, and the control at t + 1 is defined as the course angle Ψt+1 with respect to the angle at the previous angle, which can be expressed as follows:where , V = const;
- Without changing the coding, the real representation of each uniformly distributed gene is assumed to be , which is the most realistic range in the case under consideration;
- The evaluation function of each individual is the membership function of a fuzzy minimum-type decision defined by the following expression:
- Individuals with the highest value of the evaluation function have the largest share in the next parental population, and the “weaker” individuals are rejected in the selection process;
- The selection process is proportional- or rank-based selection;
- The averaging cross is used as it presents the most suitable for floating point encoding;
- The used mutation presents a perturbation of genes in accordance with the Cauchy distribution and a certain probability of occurrence in subsequent generations;
- When creating the next generation, the individuals of the parent population are not all rejected, and a certain number of (the best) are added to the descendant individuals;
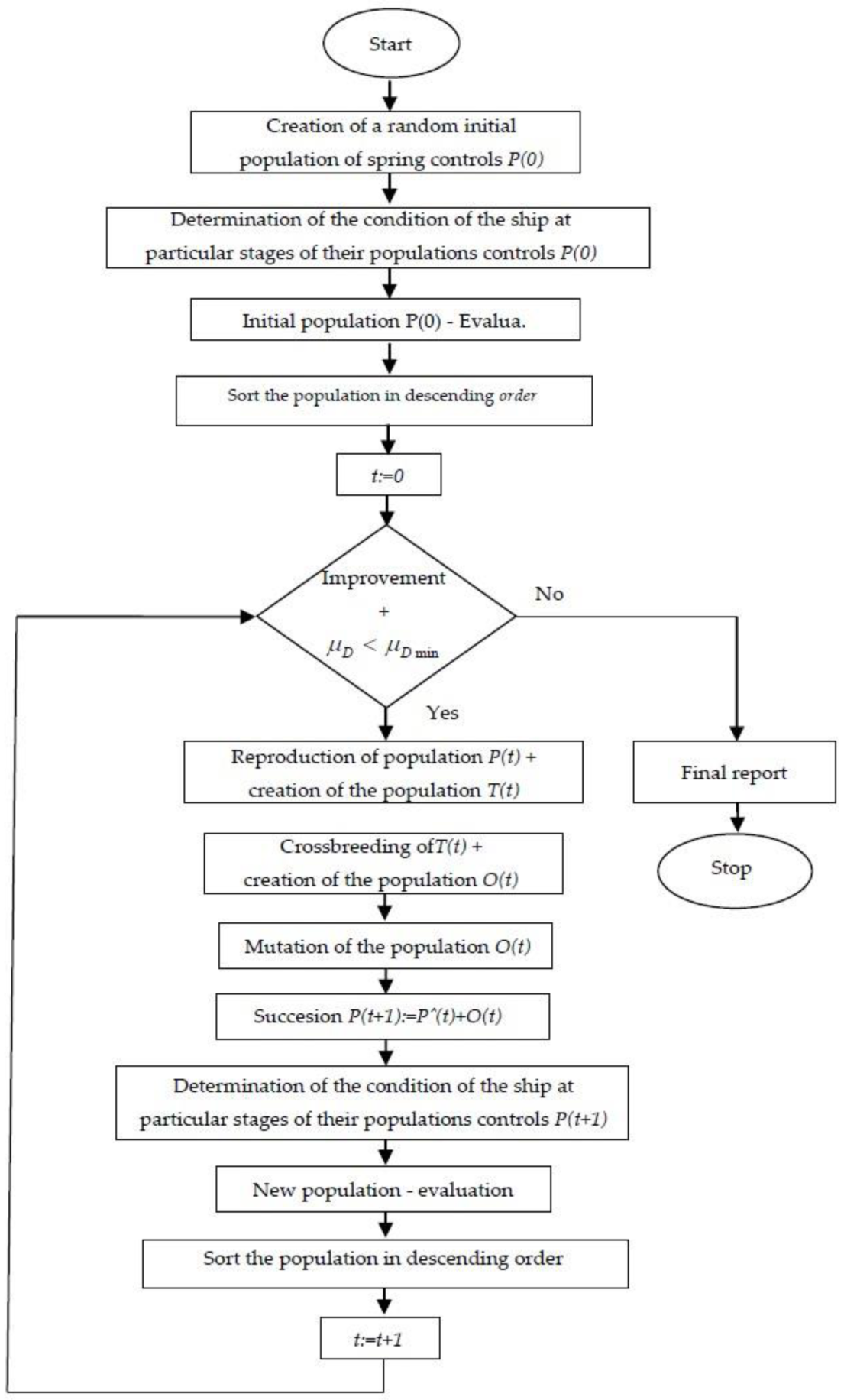
- The algorithm computation is stopped when a certain criterion is satisfied. In this paper, this criterion is taken as being when the individuals progress is less than a given threshold. The outline of the simplest evolutionary algorithm that meets the above suppositions can be presented in the form of pseudocode and in the form of block, as shown in Figure 3.
| Algorithm 1 Pseudo code |
| BEGIN k:=0; INITIALIZATION P(k) Determining an initial population P(k), which consist of randomly generated control strings (real numbers in the range [0,360]); EVALUATION P(k) For each U(t) in each sequence in the population P(k), find the achieved X(t+1) from the equation of state transition X(t+1) = f(X(t), U(t)), and apply an evaluation ofeach sequence P(k); WHILE not(no improvement) DO BEGIN REPRODUCTION Creating a temporary population T(k) for genetic operations that consists of control sequences with the highest values of the evaluation function in the population P(k), where the number of duplicated sequences depends on the values that the evaluation function takes for them; GENETIC OPERATION on T(k) Performing crossing and mutation on individuals of the temporary population T(k) creating a new descendent population O(i); EVALUATION O(i) For each U(t) in each sequence in the population O(k), find the achieved X(t+1) from the equation of state transition X(t+1) = f(X(t), U(t)), and apply an evaluation ofeach sequence O(k); SUCCESSION P1(k)+O1(k) Creating a new base population P(k + 1) by elite selection, combining the best individuals of the previous population P(k) with the best individuals of the descendant O(k) population; k:=k+1; END; END. |
3.2. Assumptions about NN in Multistage Fuzzy Control—ACNN
4. Results
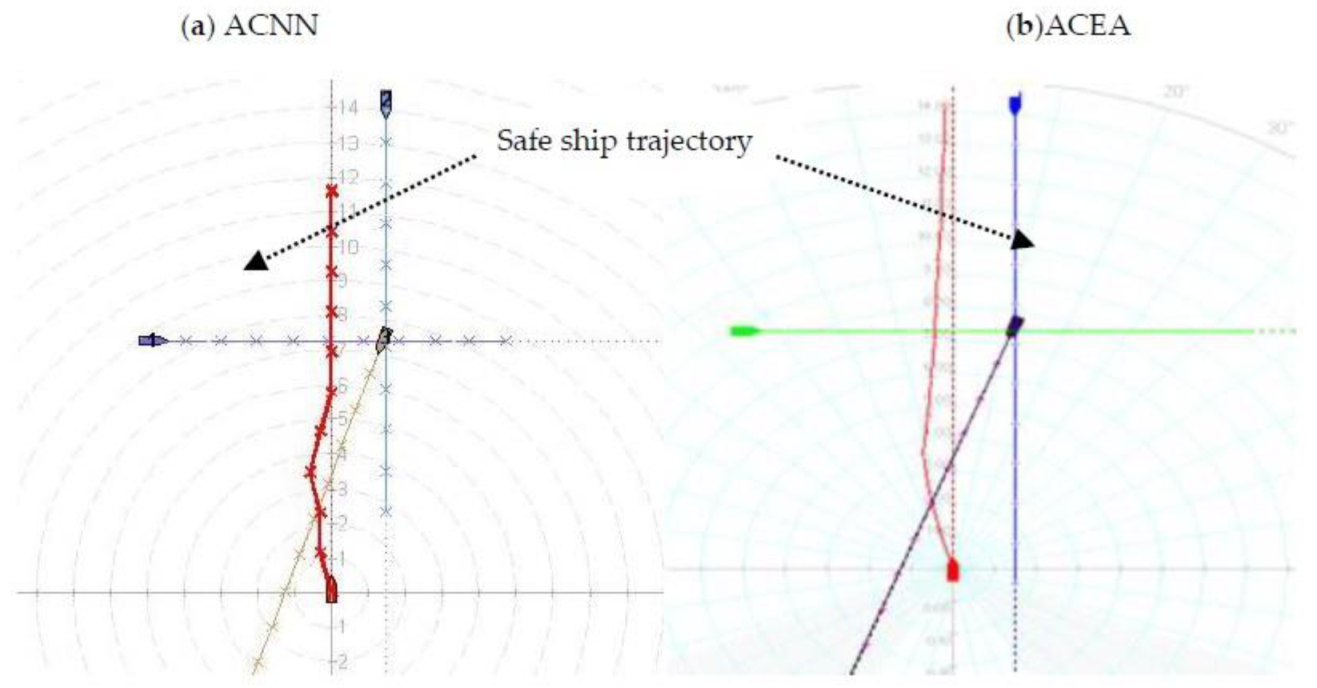
4.1. Case One: One Moving Target in Head-On Situation
- -
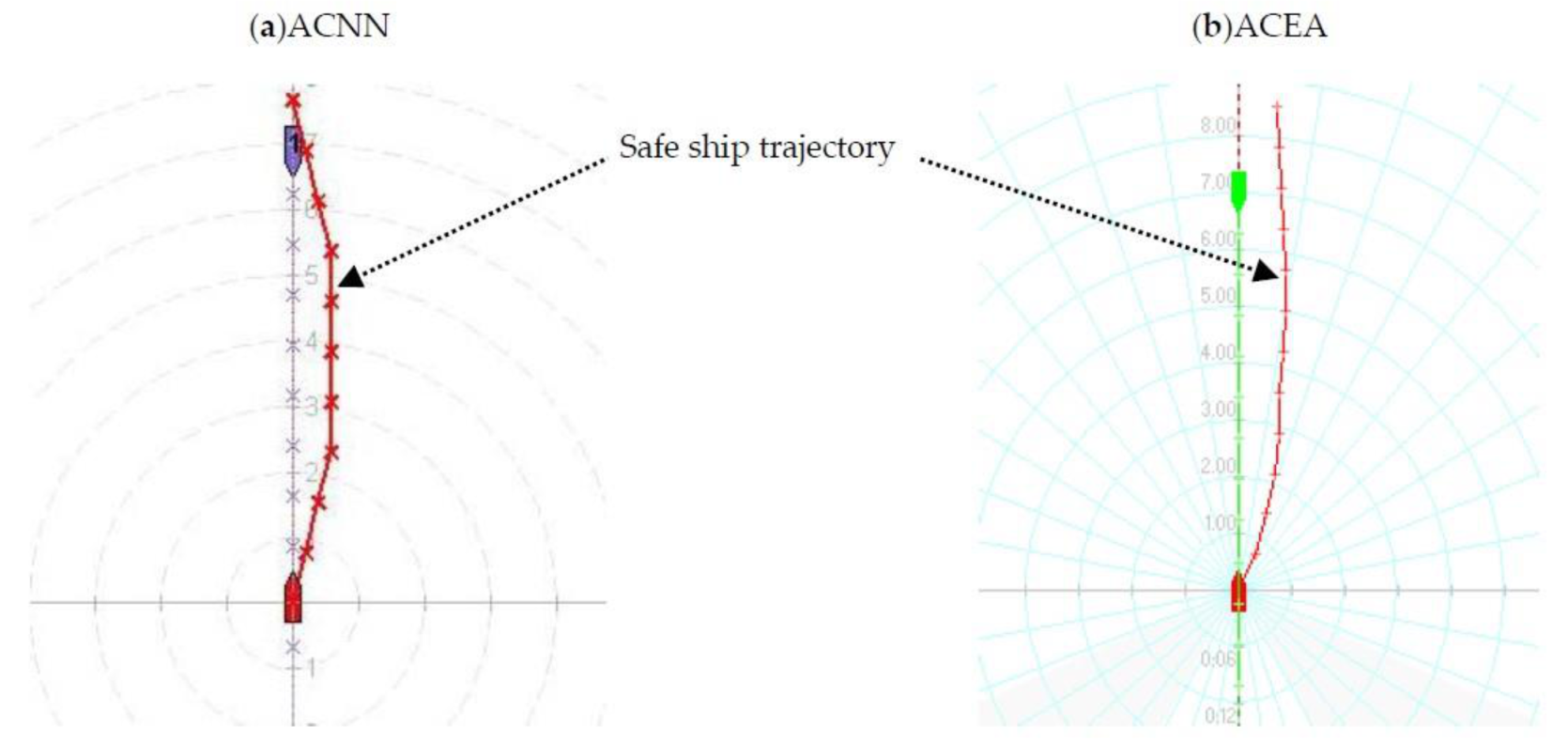
- The computation time of the ACNN approach was 1.2s, which was significantly lower than that of the ACEA approach;
- -
- The obtained total maneuvering path under the ACNN approach was 7.808 Mm, which was longer than that of the ACEA. Moreover, the path offsets were higher for the ACNN approach.
4.2. Case Two: One Moving Target in Crossing Situation
4.3. Case Three: Three Moving Targets in Different Situations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| C | fuzzy set of constraints, |
| c(k) | distance from the original course at that stage, |
| D | fuzzy set of decision, |
| Db | safe approach distance, |
| DCPA | distance to the nearest point of approach, |
| Dj | distance to the j-th object, |
| G | fuzzy set of goal, |
| L | distance from the original course, |
| minimum neuron, | |
| maximum neuron, | |
| Nj | bearing of the j-th object, |
| O(k) | descendent population, |
| P(k) | initial population, |
| a driver, | |
| receptor, | |
| transmitter, | |
| T(k) | temporary population, |
| TCPA | time remaining to approach, |
| U | control set, |
| U | control, |
| time passed from stage 0 to stage k, | |
| V | ship under control’s actual speed, |
| Vj | the j-th object’s actual speed, |
| V* | ship under control’s optimal speed, |
| W | set of final states, |
| X | Y ship position co-ordinates, |
| X | shipposition co-ordinates set, |
| distance between successive stages of the original course. | |
| λRD, λRT, λD, λC | the parameters determining the subjectivity of navigators, |
| fuzzy constraints membership function, | |
| fuzzy decision membership function, | |
| fuzzy goal membership function | |
| membership function of collision risk, | |
| safe membership function of collision risk, | |
| course of the ship before and after maneuver, | |
| course of the j-th object, | |
| optimal course of the ship, | |
| ωz | maximum angular velocity of the vessel turning, |
References
- Kang, Y.-T.; Chen, W.-J.; Zhu, D.-Q.; Wang, J.-H.; Xie, Q.-M. Collision avoidance path planning for ships by particle swarm optimization. J. Mar. Eng. Technol. Objects 2017, 26, 165–176. [Google Scholar] [CrossRef]
- Łebkowski, A. 3D Navigator Decision Support System Using the Smartglasses. Technology 2015, 117–122. [Google Scholar] [CrossRef]
- Kruszewski, J.; Mohamed-Seghir, M. Concept of ‘Sail by Wire’ controller for a ship’s propulsion system from an unmanned ship perspective. J. Mar. Eng. Technol. 2017, 16, 185–192. [Google Scholar] [CrossRef]
- Perera, L.; Carvalho, J.; Soares, C.G. Bayesian Network based sequential collision avoidance action execution for an Ocean Navigational System. IFAC Proc. Vol. 2010, 43, 266–271. [Google Scholar] [CrossRef]
- Lazarowska, A. Comparison of Discrete Artificial Potential Field Algorithm and Wave-Front Algorithm for Autonomous Ship Trajectory Planning. IEEE Access 2020, 8, 221013–221026. [Google Scholar] [CrossRef]
- Dinh, G.H.; Im, N.-K. A Study on the Construction of Stage Discrimination Model and Consecutive Waypoints Generation Method for Ship’s Automatic Avoiding Action. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 294–306. [Google Scholar] [CrossRef]
- Tomera, M. Ant Colony Optimization Algorithm Applied to Ship Steering Control. Procedia Comput. Sci. 2014, 35, 83–92. [Google Scholar] [CrossRef]
- Davis, P.V.; Dove, M.J.; Stockel, C.T. A Computer Simulation of Multi-Ship Encounters. J. Navig. 1982, 35, 347–352. [Google Scholar] [CrossRef]
- Hiraga, I.; Uchikawa, Y.; Furuhashi, T.; Nakayama, S. An acquisition of operator’s rules for collision avoidance using fuzzy neural networks. IEEE Trans. Fuzzy Syst. 1995, 3, 280–287. [Google Scholar] [CrossRef]
- Hongdan, L.; Qi, L.; Rong, S. Deterministic Vessel Automatic Collision Avoidance Strategy Evaluation Modeling. Intell. Autom. Soft Comput. 2019, 25, 789–804. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2019, 121, 451–473. [Google Scholar] [CrossRef]
- Lisowski, J. Game Control Methods Comparison when Avoiding Collisions with Multiple Objects Using Radar Remote Sensing. Remote Sens. 2020, 12, 1573. [Google Scholar] [CrossRef]
- Li, W.; Huang, Q. Research on Intelligent Avoidance Method of Shipwreck Based on Bigdata Analysis. Pol. Marit. Res. 2017, 24, 213–220. [Google Scholar] [CrossRef]
- Lazarowska, A. A new deterministic approach in a decision support system for ship’s trajectory planning. Expert Syst. Appl. 2017, 71, 469–478. [Google Scholar] [CrossRef]
- Borkowski, P.; Pietrzykowski, Z.; Magaj, J. The Algorithm of Determining an Anti-Collision Manoeuvre Trajectory Based on the Interpolation of Ship’s State Vector. Sensors 2021, 21, 5332. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, D.; Yan, X.; Haugen, S.; Soares, C.G. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs. Ocean Eng. 2015, 105, 336–348. [Google Scholar] [CrossRef]
- Lazarowska, A. Review of Collision Avoidance and Path Planning Methods for Ships Utilizing Radar Remote Sensing. Remote Sens. 2021, 13, 3265. [Google Scholar] [CrossRef]
- Lisowski, J. Game Control of maritime objects. J. Mar. Eng. Technol. 2017, 16, 165–176. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Chui, K.; Liu, R.W. A Real-Time Collision Avoidance Framework of MASS Based on B-Spline and Optimal Decoupling Control. Sensors 2021, 21, 4911. [Google Scholar] [CrossRef]
- Cho, Y.; Kim, J.; Kim, J. Intent Inference of Ship Collision Avoidance Behavior Under Maritime Traffic Rules. IEEE Access 2021, 9, 5598–5608. [Google Scholar] [CrossRef]
- Gyftakis, S.; Koromila, I.; Giannakopoulos, T.; Nivolianitou, Z.; Charou, E.; Perantonis, S. Decision Support Tool Employing Bayesian Risk Framework for Environmentally Safe Shipping. In Modeling, Computing and Data Handling Methodologies for Maritime Transportation; Springer: Cham, Switzerland, 2017; pp. 117–143. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Negenborn, R.R.; Van Gelder, P.H.A.J.M. Collision Avoidance Systems for Maritime Autonomous Surface Ships Considering Uncertainty in Ship Dynamics. IFAC-PapersOnLine 2020, 53, 14614–14619. [Google Scholar] [CrossRef]
- Szłapczyński, R.; Ghaemi, H. Framework of an Evolutionary Multi-Objective Optimisation Method for Planning a Safe Trajectory for a Marine Autonomous Surface Ship. Pol. Marit. Res. 2019, 26, 69–79. [Google Scholar] [CrossRef]
- Chen, Y.-Y.; Ellis-Tiew, M.-Z.; Chen, W.-C.; Wang, C.-Z. Fuzzy Risk Evaluation and Collision Avoidance Control of Unmanned Surface Vessels. Appl. Sci. 2021, 11, 6338. [Google Scholar] [CrossRef]
- Vascak, J.; Rutrich, M. Path Planning in Dynamic Environment using Fuzzy Cognitive Maps. In Proceedings of the 2008 6th International Symposium on Applied Machine Intelligence and Informatics, Herlany, Slovakia, 21–22 January 2008; pp. 5–9. [Google Scholar] [CrossRef]
- Wang, C.; Fu, Y. Ship Trajectory Prediction Based on Attention in Bidirectional Recurrent Neural Networks. In Proceedings of the 2020 5th International Conference on Information Science, Computer Technology and Transportation (ISCTT), Shenyang, China, 13–15 November 2020; pp. 529–533. [Google Scholar] [CrossRef]
- Mutingi, M.; Mbohwa, C. A Fuzzy-Based Particle Swarm Optimisation Approach for Task Assignment in Home Healthcare. South Afr. J. Ind. Eng. 2014, 25. [Google Scholar] [CrossRef]
- Wu, B.; Yip, T.L.; Yan, X.; Soares, C.G. Fuzzy logic based approach for ship-bridge collision alert system. Ocean Eng. 2019, 187. [Google Scholar] [CrossRef]
- Ma, S.; Liu, S.; Meng, X. Optimized BP neural network algorithm for predicting ship trajectory. In Proceedings of the 2020 Ieee 4th Information Technology, Networking, Electronic and Automation Control Conference (itnec 2020), Chongqing, China, 12–14 June 2020; pp. 525–532. [Google Scholar]
- Suo, Y.; Chen, W.; Claramunt, C.; Yang, S. A Ship Trajectory Prediction Framework Based on a Recurrent Neural Network. Sensors 2020, 20, 5133. [Google Scholar] [CrossRef]
- Kim, H.; Kim, S.-H.; Jeon, M.; Kim, J.; Song, S.; Paik, K.-J. A study on path optimization method of an unmanned surface vehicle under environmental loads using genetic algorithm. Ocean Eng. 2017, 142, 616–624. [Google Scholar] [CrossRef]
- Ni, S.; Liu, Z.; Cai, Y.; Wang, X. Modelling of Ship’s Trajectory Planning in Collision Situations by Hybrid Genetic Algorithm. Pol. Marit. Res. 2018, 25, 14–25. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, Y.; Zhang, Z.; Wang, H. Multicriteria Ship Route Planning Method Based on Improved Particle Swarm Optimization–Genetic Algorithm. J. Mar. Sci. Eng. 2021, 9, 357. [Google Scholar] [CrossRef]
- Xie, S.; Garofano, V.; Chu, X.; Negenborn, R.R. Model predictive ship collision avoidance based on Q-learning beetle swarm antenna search and neural networks. Ocean Eng. 2019, 193, 106609. [Google Scholar] [CrossRef]
- Lazarowska, A. Multi-criteria ACO-based Algorithm for Ship’s Trajectory Planning. Trans Nav. Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 31–36. [Google Scholar] [CrossRef]
- Gierusz, W.; Łebkowski, A. The researching ship Gdynia. Pol. Marit. Res. 2012, 19, 11–18. [Google Scholar] [CrossRef]
- Tsou, M.-C.; Hsueh, C.-K. The Study of Ship Collision Avoidance Route Planning by Ant Colony Algorithm. J. Mar. Sci. Technol. 2010, 18, 16. [Google Scholar] [CrossRef]
- Gierusz, W.; Rybczak, M. Effectiveness of Multidimensional Controllers Designated to Steering of the Motions of Ship at Low Speed. Sensors 2020, 20, 3533. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Wang, H.; Zhao, W.; Xue, Y. Ship’s Trajectory Planning Based on Improved Multiobjective Algorithm for Collision Avoidance. J. Adv. Transp. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Lisowski, J. Synthesis of a Path-Planning Algorithm for Autonomous Robots Moving in a Game Environment during Collision Avoidance. Electronics 2021, 10, 675. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R.; Greig, A. Review of Collision Avoidance and Path Planning Methods for Ships in Close Range Encounters. J. Navig. 2009, 62, 455–476. [Google Scholar] [CrossRef]
- Miele, A.; Wang, T. Optimal Trajectories and Guidance Schemes for Ship Collision Avoidance. J. Optim. Theory Appl. 2006, 129, 1–21. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Z.; Zheng, Z. A novel framework for regional collision risk identification based on AIS data. Appl. Ocean Res. 2019, 89, 261–272. [Google Scholar] [CrossRef]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.-B. Exploiting AIS Data for Intelligent Maritime Navigation: A Comprehensive Survey from Data to Methodology. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1559–1582. [Google Scholar] [CrossRef]
- Tang, Y.; He, H.; Ni, Z.; Zhong, X.; Zhao, D.; Xu, X. Fuzzy-Based Goal Representation Adaptive Dynamic Programming. IEEE Trans. Fuzzy Syst. 2015, 24, 1159–1175. [Google Scholar] [CrossRef]
- Mohamed-Seghir, M. The fuzzy properties of the ship control in collision situations. In Proceedings of the 2017 IEEE International Conference on Innovations in Intelligent Systems and Applications (INISTA), Gdynia, Poland, 3–5 July 2017; pp. 107–112. [Google Scholar] [CrossRef]
- Zadeh, L.A. A computational approach to fuzzy quantifiers in natural languages. Comput. Math. Appl. 1983, 9, 149–184. [Google Scholar] [CrossRef]
- Bellman, R.E.; Zadeh, L.A. Decision-Making in a Fuzzy Environment. Manag. Sci. 1970, 17. [Google Scholar] [CrossRef]
- Romero, R.F.; Kacprzyk, J.; Gomide, F. Neural Network Based Algorithm for Dynamic System Optimization. Asian J. Control. 2008, 3, 131–142. [Google Scholar] [CrossRef]
- Goodwin, E.M. A Statistical Study of Ship Domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Coldwell, T.G. Marine Traffic Behaviour in Restricted Waters. J. Navig. 1983, 36, 430–444. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe Maritime Autonomous Navigation With COLREGS, Using Velocity Obstacles. IEEE J. Ocean. Eng. 2013, 39, 110–119. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szłapczyńska, J. Review of ship safety domains: Models and applications. Ocean Eng. 2017, 145, 277–289. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. COLREGS-Constrained Real-time Path Planning for Autonomous Ships Using Modified Artificial Potential Fields. J. Navig. 2018, 72, 588–608. [Google Scholar] [CrossRef]
- Smierzchalski, R.; Michalewicz, Z. Modeling of ship trajectory in collision situations by an evolutionary algorithm. IEEE Trans. Evol. Comput. 2000, 4, 227–241. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship Coordinates | ||||
|---|---|---|---|---|
| Position [X,Y] | Course ψ [o] | Speed V [kn] | Visibility | |
| 0.0; 0.0 | 0 | 12 | good | |
| Targets Coordinates | ||||
| Target | Nj [o] | Dj [nm] | ψj [o] | Vj [kn] |
| 1 | 0.0 | 7.0 | 180.0 | 10.0 |
| KERRYPNX | Course ψ [o] | Speed V [kn] | DCPA [nm] | TCPA [nm] | Calculation Time [s] |
|---|---|---|---|---|---|
| 1 | 14 | 10.3 | 7.8 | 16.08 | 12 |
| 2 | 14 | 10.3 | 7.8 | 11.48 | - |
| 3 | 14 | 10.3 | 7.8 | 6.88 | - |
| 4 | 0 | 10 | 5.8 | 2.60 | - |
| 5 | 0 | 10 | 5.7 | −2.00 | - |
| 6 | 0 | 10 | 5.7 | −6.60 | - |
| 7 | 0 | 10 | 5.7 | −11.20 | - |
| Stage | Course ψ [o] | Speed V [kn] | DCPA [nm] | TCPA [nm] | Calculation Time [s] |
|---|---|---|---|---|---|
| 1 | 25.9 | 10 | 0.846 | 18.00 | 5.1 |
| 2 | 16.2 | 10 | 0.848 | 14.01 | - |
| 3 | 12.1 | 10 | 0.72 | 10.06 | - |
| 4 | 9.7 | 10 | 0.68 | 6.10 | - |
| 5 | 6.9 | 10 | 0.66 | 2.16 | - |
| 6 | 1.1 | 10 | 0.7 | −1.71 | - |
| 7 | 0 | 10 | 0.804 | −5.58 | - |
| Ship Coordinates | ||||
|---|---|---|---|---|
| Position [X,Y] | Course ψ [o] | Speed V [kn] | Visibility | |
| 0.0; 0.0 | 0 | 12 | Good | |
| Targets Coordinates | ||||
| Target | Nj [o] | Dj [nm] | ψj [o] | Vj [kn] |
| 1 | 45.0 | 7.0 | 270.0 | 10.0 |
| Ship Coordinates | ||||
|---|---|---|---|---|
| Position [X,Y] | Course ψ [o] | Speed V [kn] | Visibility | |
| 0.0; 0.0 | 0 | 12 | Good | |
| Targets Coordinates | ||||
| Target | Nj [o] | Dj [nm] | ψj [o] | Vj [kn] |
| 1 | 326.0 | 8.8 | 90.0 | 10.0 |
| 2 | 60.0 | 14.3 | 180.0 | 12.3 |
| 3 | 11.0 | 7.5 | 200 | 11.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed-Seghir, M.; Kula, K.; Kouzou, A. Artificial Intelligence-Based Methods for Decision Support to Avoid Collisions at Sea. Electronics 2021, 10, 2360. https://doi.org/10.3390/electronics10192360
Mohamed-Seghir M, Kula K, Kouzou A. Artificial Intelligence-Based Methods for Decision Support to Avoid Collisions at Sea. Electronics. 2021; 10(19):2360. https://doi.org/10.3390/electronics10192360
Chicago/Turabian StyleMohamed-Seghir, Mostefa, Krzysztof Kula, and Abdellah Kouzou. 2021. "Artificial Intelligence-Based Methods for Decision Support to Avoid Collisions at Sea" Electronics 10, no. 19: 2360. https://doi.org/10.3390/electronics10192360
APA StyleMohamed-Seghir, M., Kula, K., & Kouzou, A. (2021). Artificial Intelligence-Based Methods for Decision Support to Avoid Collisions at Sea. Electronics, 10(19), 2360. https://doi.org/10.3390/electronics10192360