
Novel Protection Coordination Scheme for Active Distribution Networks

 ,
,  , , ,
, , , 
 and
and 
Abstract
:1. Introduction
2. Related Works
3. Research Methodology
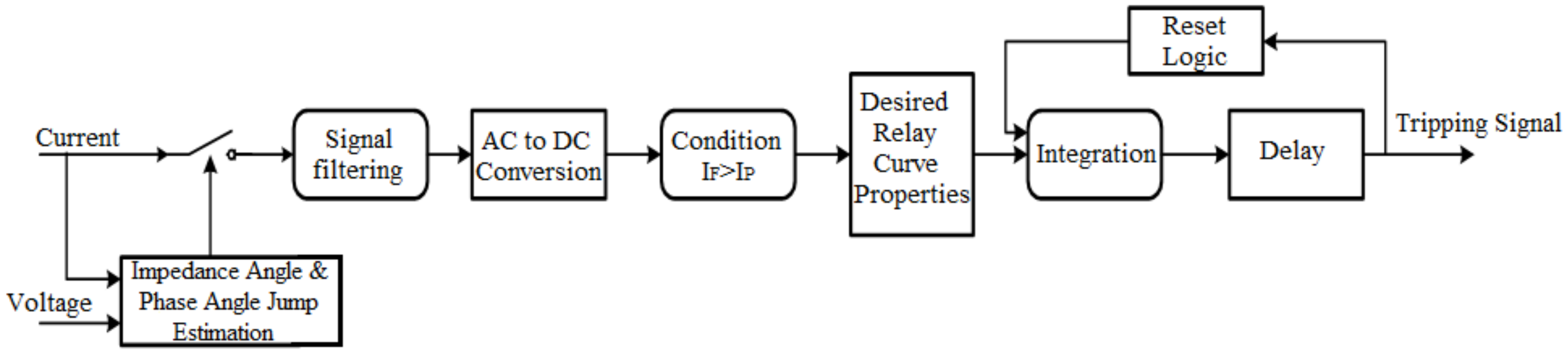
3.1. Digital Over-Current Relay Characteristics
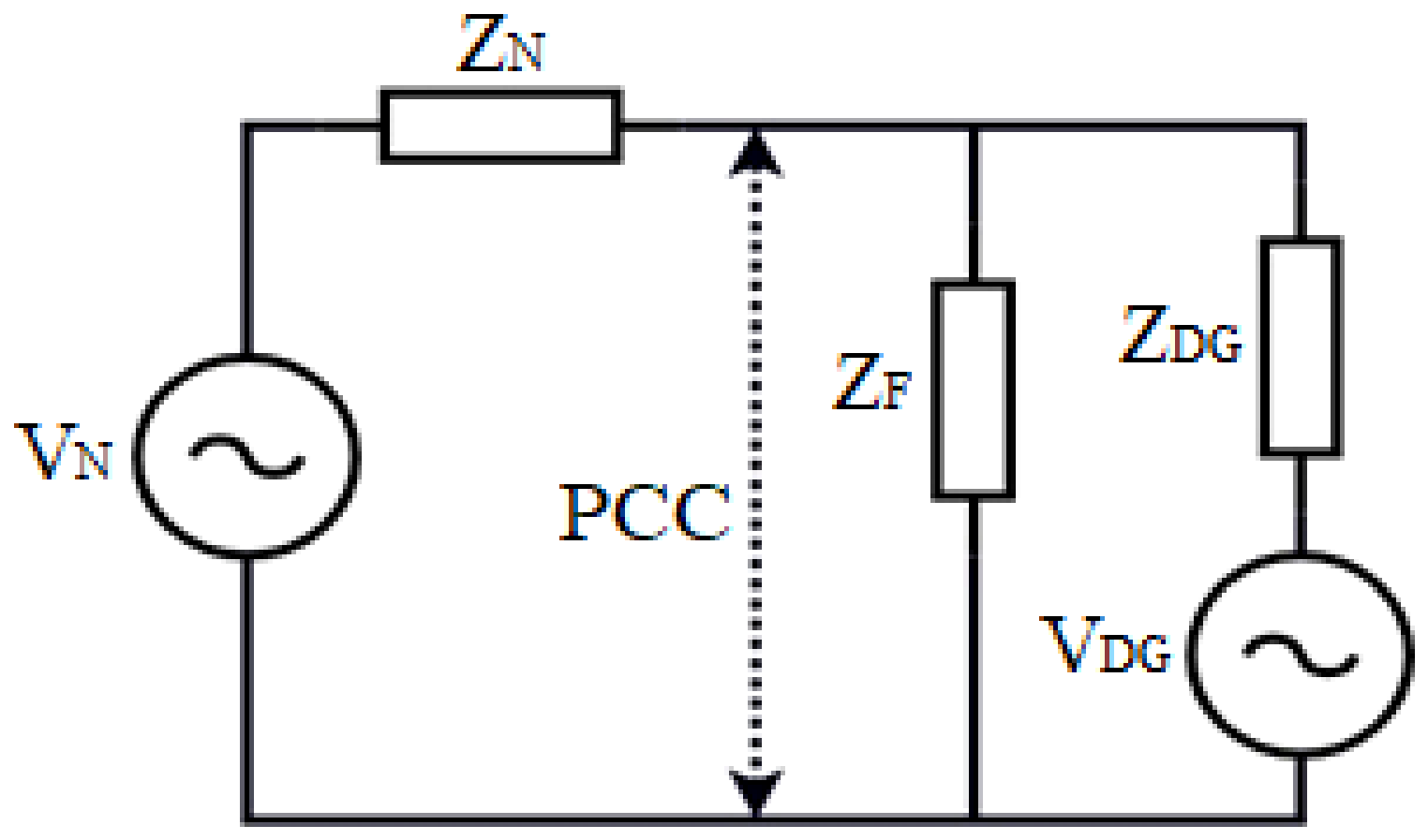
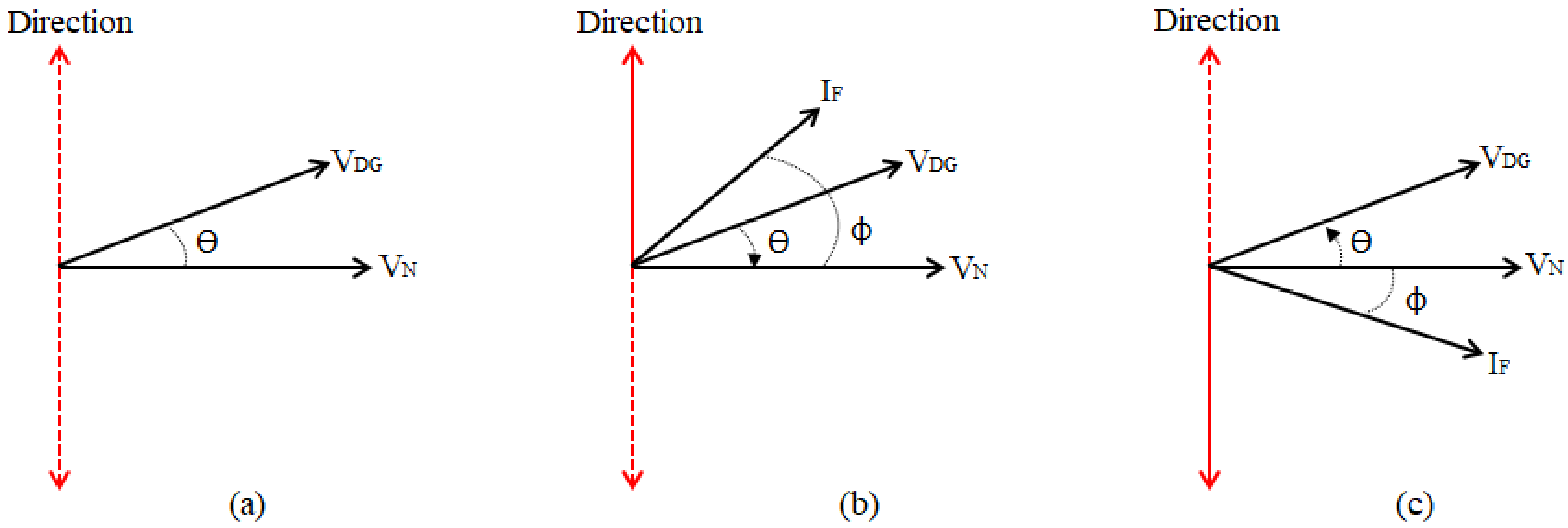
3.2. Problem Formulation
| Algorithm 1: Proposed Protection Coordination Scheme. |
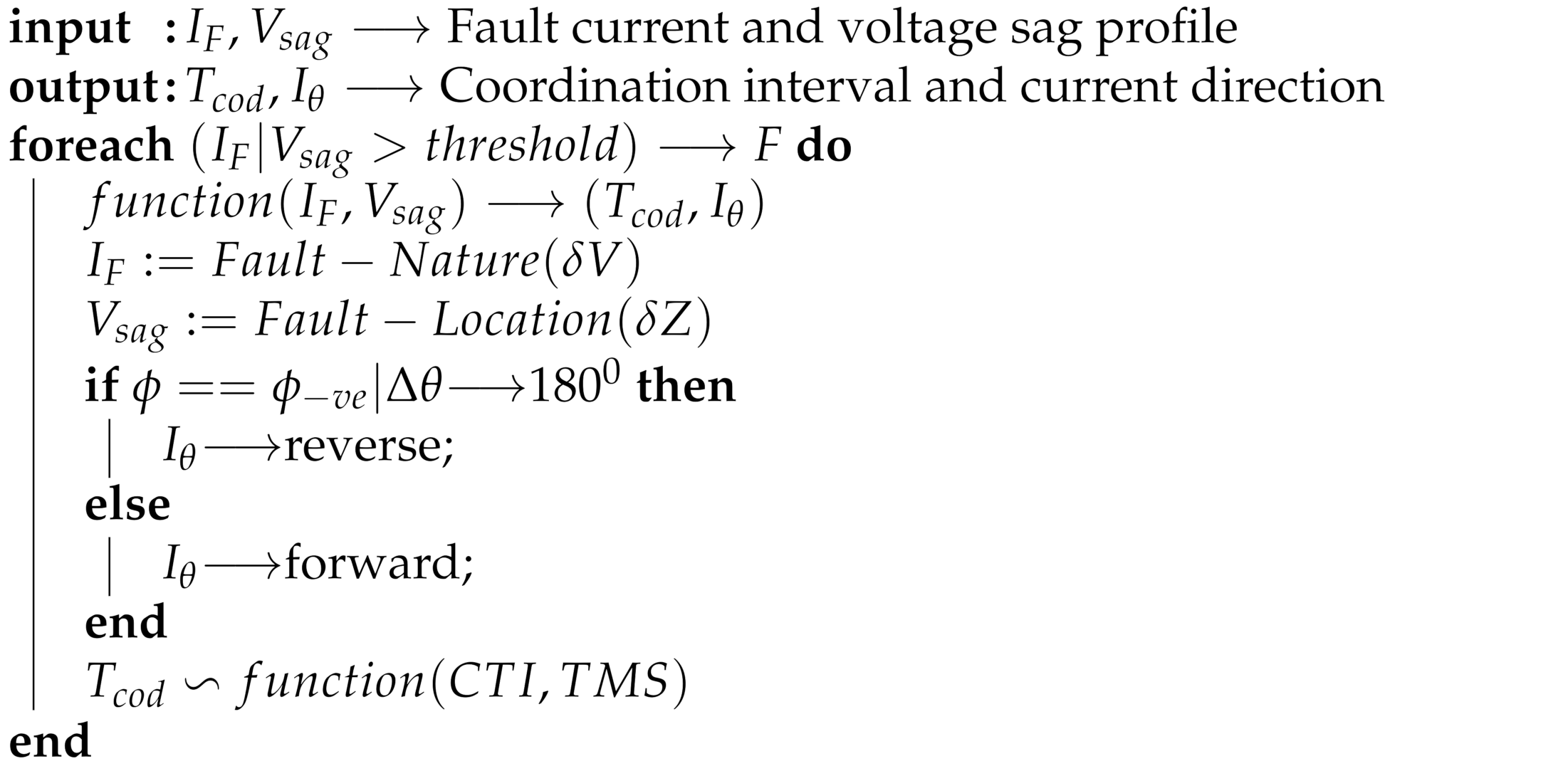 |
3.3. Economic Constraints
4. Results and Discussion
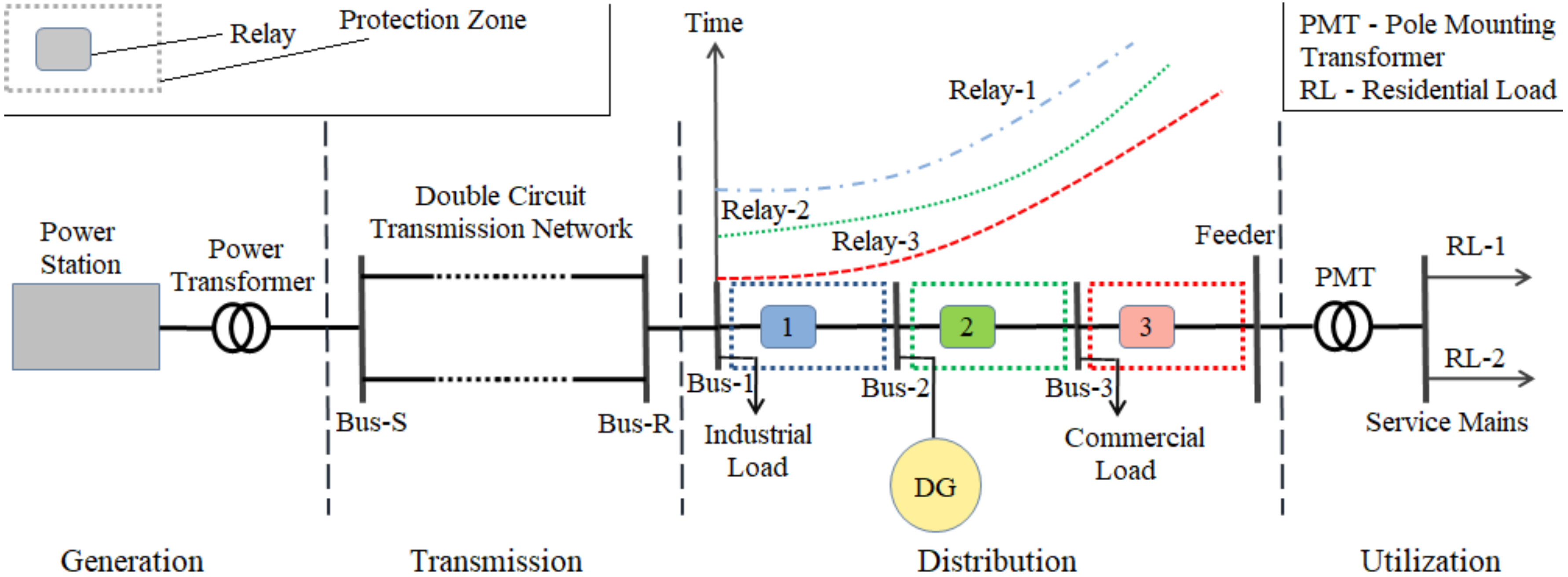
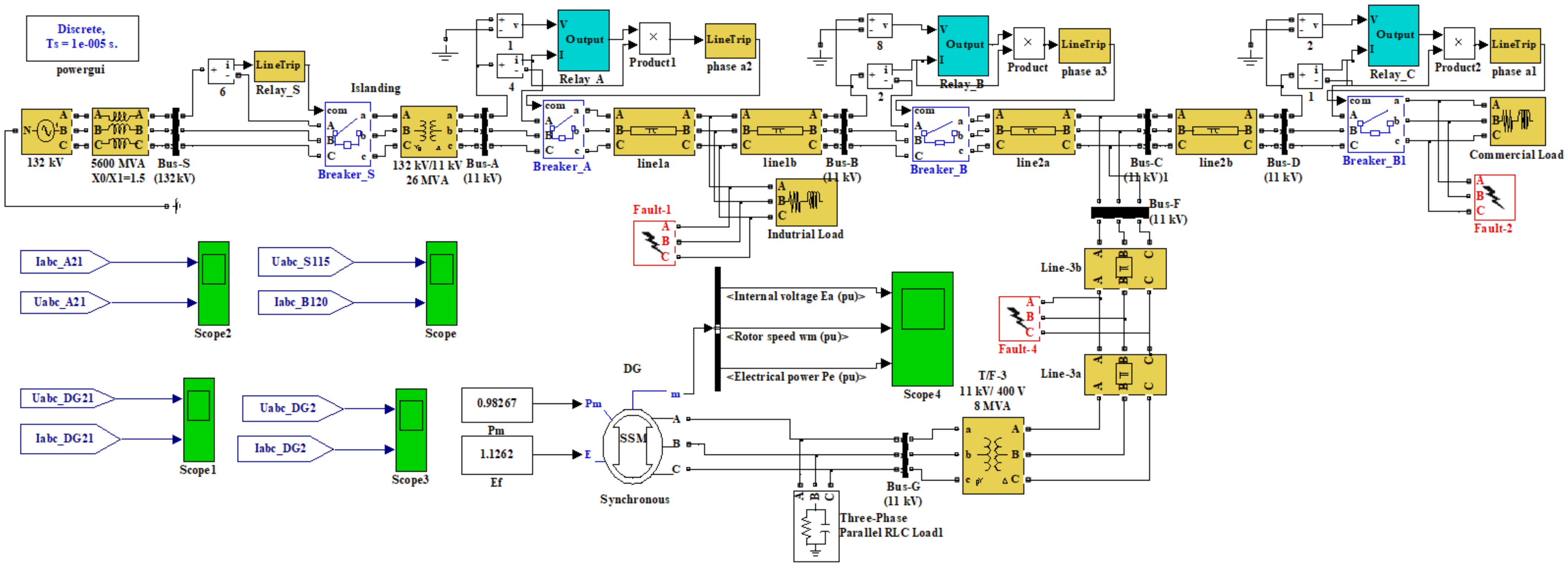
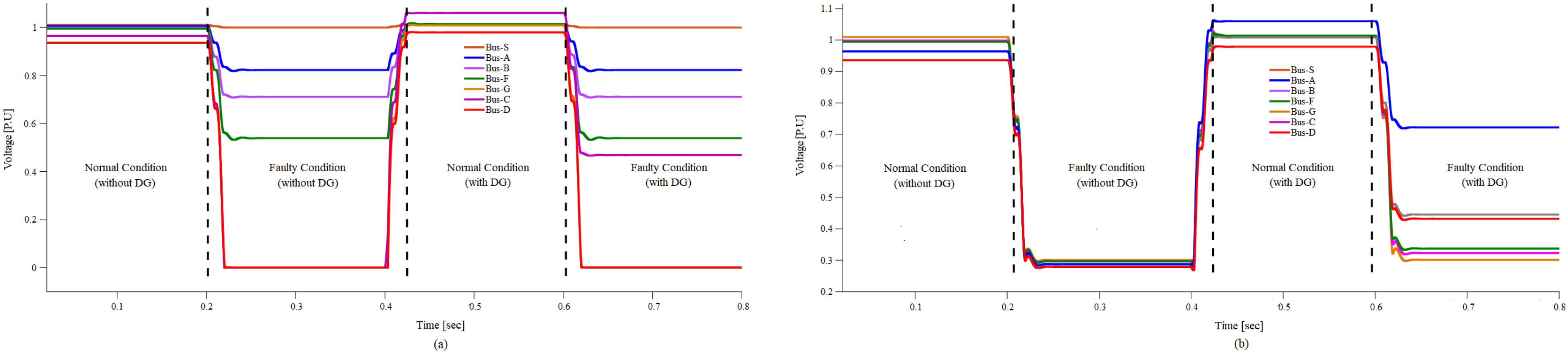
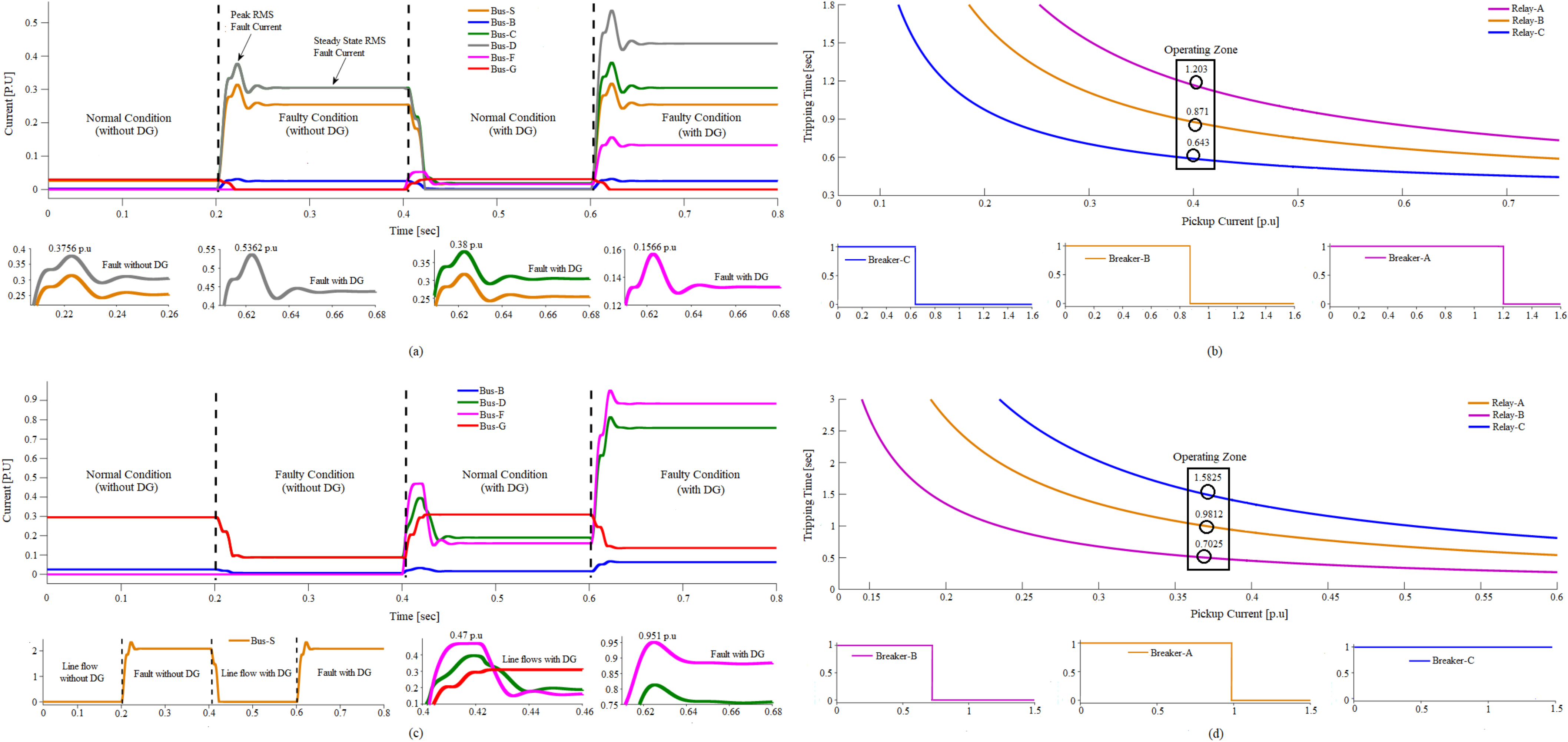
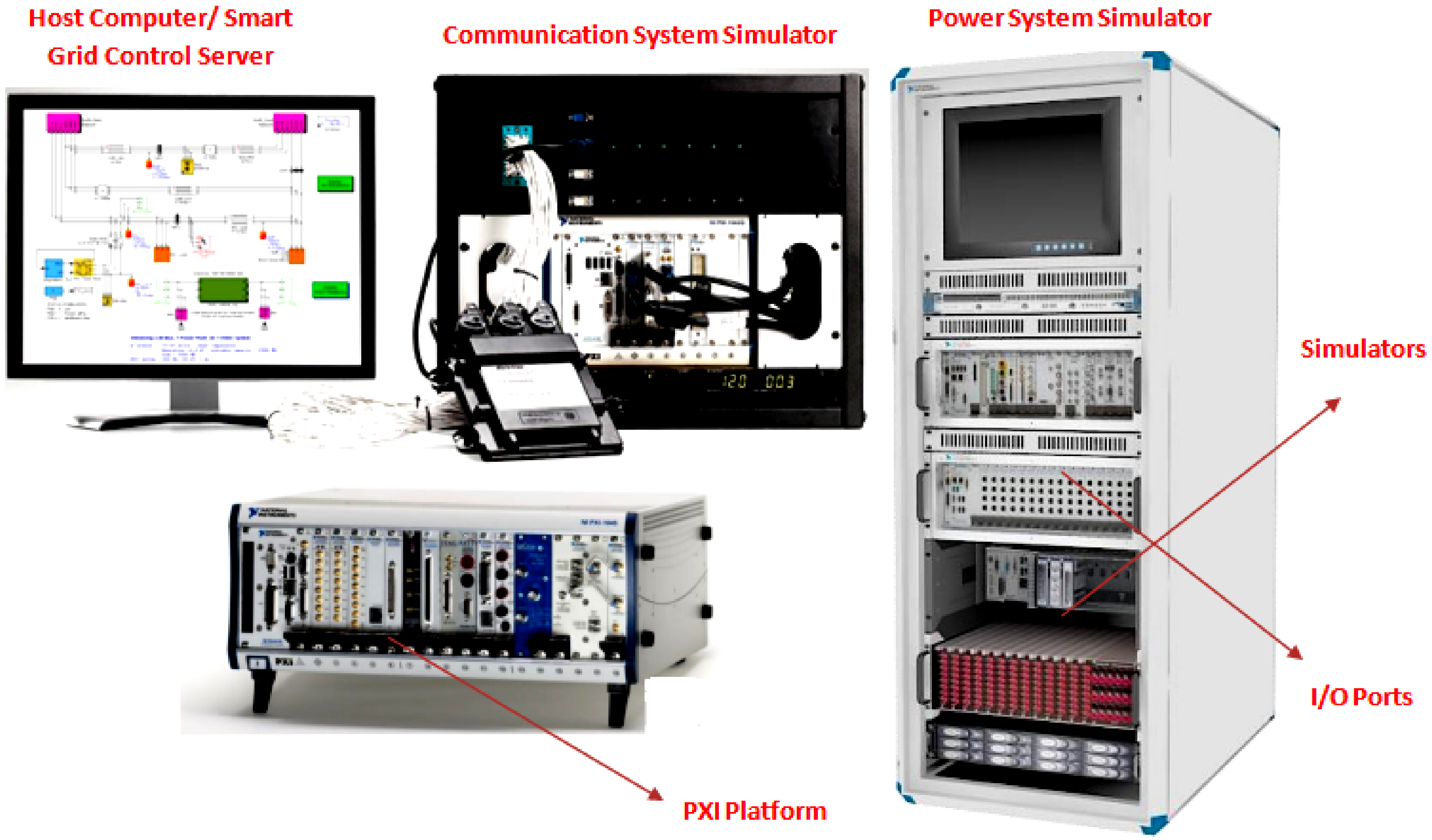
4.1. Simulated Setup
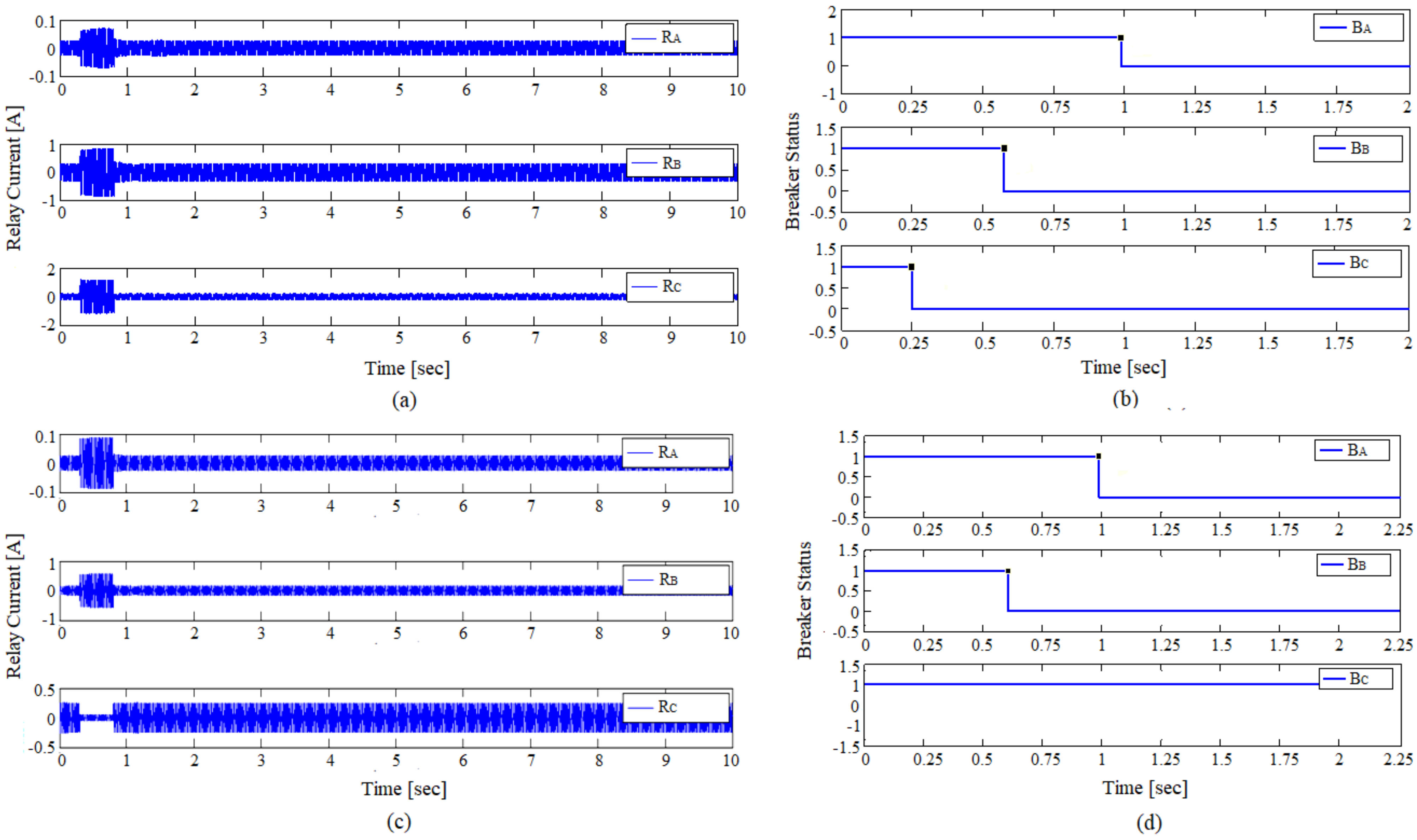
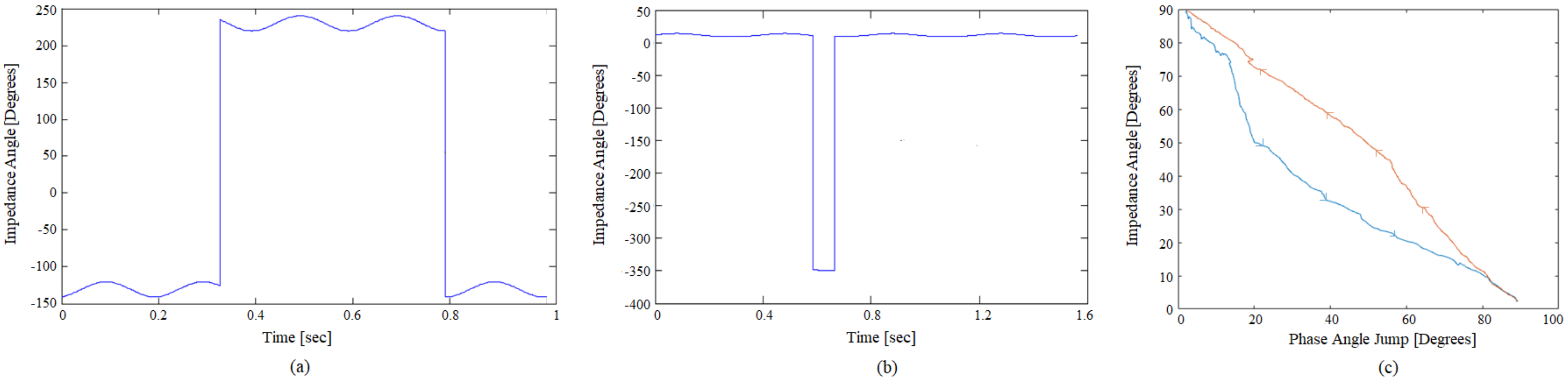
4.2. Real Time Experiments
5. Comparative Analysis
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ukil, A.; Živanović, R. Abrupt change detection in power system fault analysis using adaptive whitening filter and wavelet transform. Electr. Power Syst. Res. 2006, 76, 815–823. [Google Scholar] [CrossRef] [Green Version]
- Katyara, S.; Hashmani, A.; Chowdhary, B.S.; Musavi, H.A.; Aleem, A.; Chachar, F.A.; Shah, M.A. Wireless Networks for Voltage Stability Analysis and Anti-islanding Protection of Smart Grid System. Wirel. Pers. Commun. 2021, 116, 1361–1378. [Google Scholar] [CrossRef]
- Juan, Y.; Ming, S.; Bo, D. Research about impact of DGs in distribution networks. In Proceedings of the 2008 IEEE China International Conference on Electricity Distribution, Guangzhou, China, 10–13 December 2008; pp. 1–6. [Google Scholar]
- Katyara, S.; Staszewski, L.; Leonowicz, Z. Protection coordination of properly sized and placed distributed generations—Methods, applications and future scope. Energies 2018, 11, 2672. [Google Scholar] [CrossRef] [Green Version]
- Łukasz, H.; Zeineldin, H.H. Planning the coordination of directional overcurrent relays for distribution systems considering DG. IEEE Trans. Smart Grid 2016, 7, 1642–1649. [Google Scholar]
- Gomez, J.C.; Morcos, M.M. Voltage sag mitigation using overcurrent protection devices. Electr. Power Components Syst. 2001, 29, 71–81. [Google Scholar]
- Chen, L.; Zhang, Q.; Wang, H.; Ma, R.; Wang, W.; Xu, H. Voltage sag assessment considering time characteristic of distance protection in meshed network. In Proceedings of the Transmission and Distribution Conference and Exposition-Latin America (PES T&D-LA), Morelia, Mexico, 20–24 September 2016; pp. 1–5. [Google Scholar]
- Katyara, S.; Shaikh, M.F.; Shaikh, S.; Khand, Z.H.; Staszewski, L.; Bhan, V.; Majeed, A.; Shah, M.A.; Zbigniew, L. Leveraging a Genetic Algorithm for the Optimal Placement of Distributed Generation and the Need for Energy Management Strategies Using a Fuzzy Inference System. Electronics 2021, 10, 172. [Google Scholar] [CrossRef]
- Jennet, K.I.; Booth, C.D.; Coffele, F.; Roscoe, A.J. Investigation of the sympathetic tripping problem in power systems with large penetrations of distributed generation. IET Gen. Transm. Distrib. 2015, 9, 379–385. [Google Scholar] [CrossRef] [Green Version]
- Anthony, M.A.; Anthony, M. Electric Power System Protection and Coordination: A Design Handbook for Overcurrent Protection; McGraw-Hill Companies: New York, NY, USA, 1995. [Google Scholar]
- Katyara, S.; Staszewski, L.; Musavi, H.A.; Soomro, F. Short Circuit Capacity: A Key to Design Reliable Protection Scheme for Power System with Distributed Generation. Int. J. Mech. Eng. Robot. Res. 2017, 6. [Google Scholar] [CrossRef]
- Horak, J. Directional overcurrent relaying (67) concepts. In Proceedings of the 59th Annual Conference for Protective Relay Engineers, College Station, TX, USA, 4–6 April 2006; p. 13. [Google Scholar]
- Srivastava, A.; Tripathi, J.M.; Mohanty, S.R.; Panda, B. Optimal over-current relay coordination with distributed generation using hybrid particle swarm optimization-gravitational search algorithm. Electr. Power Components Syst. 2016, 44, 506–517. [Google Scholar] [CrossRef]
- Yousaf, M.; Mahmood, T. Protection coordination for a distribution system in the presence of distributed generation. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 408–421. [Google Scholar] [CrossRef]
- Katyara, S.; Akhtar, F.; Solanki, S.; Leonowicz, Z.; Staszewski, L. Adaptive fault classification approach using digitized fuzzy logic (dfl) based on sequence components. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Palermo, Italy, 12–15 June 2018; pp. 1–7. [Google Scholar]
- Viawan, F.A.; Reza, M. The impact of synchronous distributed generation on voltage dip and overcurrent protection coordination. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 18 November 2005; p. 6. [Google Scholar]
- Dewadasa, M.; Ghosh, A.; Ledwich, G. Protection of distributed generation connected networks with coordination of overcurrent relays. In Proceedings of the 37th IEEE Annual Conference of the IEEE Industrial Electronics Society (IECON), Melbourne, VIC, Australia, 7–10 November 2011; pp. 924–929. [Google Scholar]
- Sharaf, H.M.; Zeineldin, H.H.; Ibrahim, D.K.; El Zahab, E.E.D.A. Protection coordination of directional overcurrent relays considering fault current direction. In Proceedings of the 5th IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Istanbul, Turkey, 12–15 October 2014; pp. 12–15. [Google Scholar]
- Gomez, J.C.; Morcos, M.M. Coordination of voltage sag and overcurrent protection in DG systems. IEEE Trans. Power Deliv. 2005, 20, 214–218. [Google Scholar] [CrossRef]
- Chawla, A.; Bhalija, B.R.; Panigarhi, B.K.; Singh, M. Gravitational Search Based Algorithm for Optimal Coordination of Directional Overcurrent Relays Using User Defined Characteristic. Electr. Power Components Syst. 2018, 46, 43–55. [Google Scholar] [CrossRef]
- Ghotbi-Maleki, M.; Chabanloo, R.M.; Zeineldin, H.H.; Miangafsheh, S.M.H. Design of Setting Group-Based Overcurrent Protection Scheme for Active Distribution Networks Using MILP. IEEE Trans. Smart Grid 2020, 12, 1185–1193. [Google Scholar] [CrossRef]
- Yazdaninejadi, A.; Nazarpour, D.; Talavat, V. Fast Protection Scheme for Active Distribution Networks: Breaking Chains by Utilizing Auxiliary Relays. J. Mod. Power Syst. Clean Energy 2020, 8, 540–548. [Google Scholar] [CrossRef]
- Zarei, S.F.; Khankalantary, S. Protection of active distribution networks with conventional and inverter-based distributed generators. Int. J. Electr. Power Energy Syst. 2021, 129, 106746. [Google Scholar] [CrossRef]
- Wang, Y.; Bollen, M.H.J.; Xiao, X.-Y. Calculation of the phase-angle-jump for voltage dips in three-phase systems. IEEE Trans. Power Deliv. 2015, 30, 480–487. [Google Scholar] [CrossRef]
- Shaikh, M.F.; Shah, M.A.; Katyara, S.; Chowdhry, B.S. Estimation of Phase Angle Jump (PAJ) for Different Types of Faults and Unbalancing in Distribution System. Int. J. Eng. Technol. 2018, 7, 23–29. [Google Scholar] [CrossRef] [Green Version]
- Rebizant, W.; Szafran, J.; Wiszniewski, A. Digital Signal Processing in Power System Protection and Control; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Jetson Nano Developer Kit. Available online: https://developer.nvidia.com/embedded/jetson-nano-developer-kit (accessed on 8 August 2021).
- Ledex Relay Selector Switch 28V PN 172964-001. Available online: https://flyingcolorsairparts.com/27362 (accessed on 8 August 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault | Relay | TMS | |||
|---|---|---|---|---|---|
| 0.0344 | 0.0884 | 0.9062 | 0.125 | ||
| Forward | 0.2417 | 0.89 | 0.5305 | 0.1 | |
| 0.2154 | 1.74 | 0.2449 | 0.075 | ||
| 0.0344 | 0.084 | 0.9579 | 0.125 | ||
| Reverse | 0.2417 | 0.787 | 0.5776 | 0.1 | |
| 0.2154 | 0.082 | −0.5437 | 0.075 |
| Technique | Fault Localization (Cycles) | Fault Clearance (s) | Type of Faults | Mitigation Uncertainty (%) | Practical Tests | Computational Burden (s) |
|---|---|---|---|---|---|---|
| Current Polarity [17] | 0.75 | 0.03241 | S | 13.15 | NO | 9.24 |
| Polarizing Voltage [18] | 1.25 | 0.04117 | S & AS | 10.34 | NO | 13.18 |
| RF Curve [19] | 1.15 | 0.01675 | AS | 11.65 | NO | 10.32 |
| Proposed Approach | 0.85 | 0.02145 | S & AS | 9.36 | YES | 12.38 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shaikh, M.F.; Katyara, S.; Khand, Z.H.; Ali Shah, M.; Staszewski, L.; Bhan, V.; Majeed, A.; Shaikh, S.; Zbigniew, L. Novel Protection Coordination Scheme for Active Distribution Networks. Electronics 2021, 10, 2312. https://doi.org/10.3390/electronics10182312
Shaikh MF, Katyara S, Khand ZH, Ali Shah M, Staszewski L, Bhan V, Majeed A, Shaikh S, Zbigniew L. Novel Protection Coordination Scheme for Active Distribution Networks. Electronics. 2021; 10(18):2312. https://doi.org/10.3390/electronics10182312
Chicago/Turabian StyleShaikh, Muhammad Fawad, Sunny Katyara, Zahid Hussain Khand, Madad Ali Shah, Lukasz Staszewski, Veer Bhan, Abdul Majeed, Shoaib Shaikh, and Leonowicz Zbigniew. 2021. "Novel Protection Coordination Scheme for Active Distribution Networks" Electronics 10, no. 18: 2312. https://doi.org/10.3390/electronics10182312
APA StyleShaikh, M. F., Katyara, S., Khand, Z. H., Ali Shah, M., Staszewski, L., Bhan, V., Majeed, A., Shaikh, S., & Zbigniew, L. (2021). Novel Protection Coordination Scheme for Active Distribution Networks. Electronics, 10(18), 2312. https://doi.org/10.3390/electronics10182312