
A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions



Abstract
1. Introduction
2. Scholarly Contributions and Applications
- Definition: (Trajectory Planning)Given a function on a bounded variation, where and . If there exists a process that can retain the values , such that for M, then the process is called a continuous process, and ∂ is called trajectory planning.
- Definition: (Optimal trajectory Planning)Let optimal trajectory planning have a cost function , such that denotes the set of all paths. If definitions 1 is fulfilled to search the path and , such that ∂ is a set of all the feasible paths, then is called as optimal path and , and is optimal path planning.
3. Objectives and Content of This Review
- Consolidation of relevant work: The tendency to concurrently discern a vehicle’s environment, stabilize and restore its motion, and conduct the required driving maneuvers is an exceptional aptitude of human drivers. All over the world, researchers are working on replicating this maneuverable capability of human drivers into designing an autonomous vehicular system to provide a simplified design, comfort, and safety via ensuring the vehicle efficiency is not perturbed [49,50,51,52,53].
- Exploration of design space and Parametric Characterization through Numerical Solvers: Numerical solvers are considered the primitive and most predominant tool for determining the design space and modeling the conventional configuration for ground and aerial vehicles. Few papers on the environment modeling characterization through numerical solvers demonstrate that this area needs to be researched thoroughly. We provide this study in Section 4.
- Survey of trajectory optimization methodologies utilizing Bio-inspired and hybrid Technique: The selection modus operandi to execute trajectory optimization is the most critical question for computational and numerical studies. The development of numerical techniques for optimization directly relates to the exploration of space for ground and aerial vehicles. The trajectory optimization problem is treated as an optimal non-linear problem, so to formulate the optimal and desired trajectory for ground and aerial vehicles, plenty of optimization methods are present for utilization. Therefore, this urges us to conduct extensive research to highlight the optimization algorithms for performing trajectory optimization. We provide this study in Section 5 and Section 6.
- Limitations and the way forward: The paper’s contribution also lies in determining the factors that are not contributing to the optimal trajectory optimization for both ground and aerial vehicles. The drawbacks are categorized into two main areas: (i) the limitations in existing non-linear control techniques; (ii) the limitations in ground and aerial vehicles design. We provide this study at last in Section 7.
Techniques for Path Planning
4. Numerical Techniques
- Dynamic programming: Dynamic programming [80] is an optimization approach that transforms a complex problem into a sequence of simpler problems. The optimality criterion in continuous time is based on the Hamilton–Jacobi–Bellman partial differential equation.
- Indirect methods: In the indirect method [81], the calculus of variations is used to calculate the first-order optimality conditions of the original optimal control problem. The indirect approach solves the problem indirectly by converting the optimal control problem to a boundary-value problem. As a result, the optimal solution is found in an indirect method by solving a system of differential equations that satisfies endpoint and interior-point conditions.
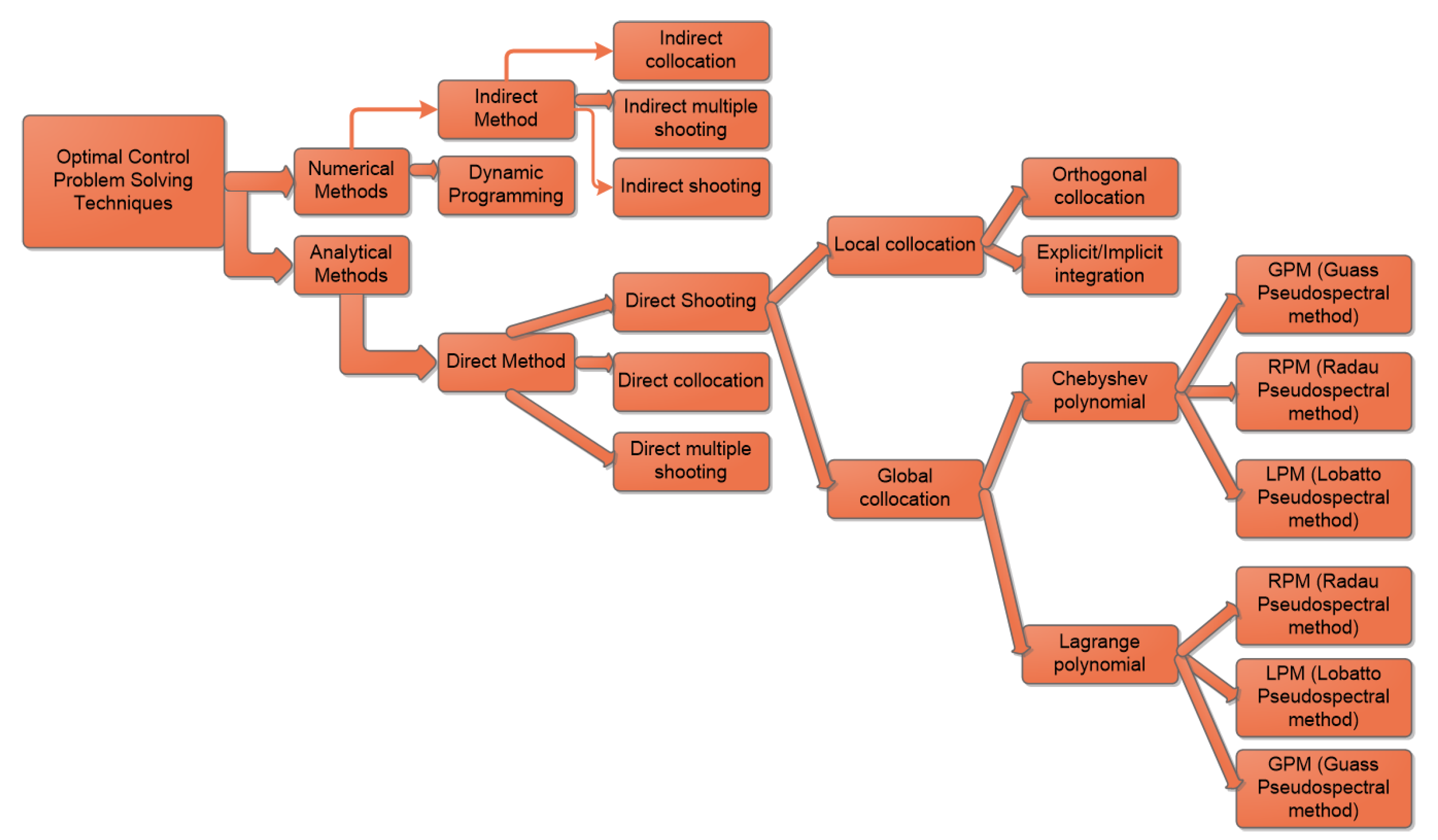
- Direct methods: In a direct method, the state and control of the optimal control problem are discretized in some manner, and the problem is transcribed to a non-linear optimization problem or non-linear programming problem (NLP). Direct methods are divided into three categories: direct shooting [82], direct multiple shooting [83], and collocation. Direct collocation methods utilize a polynomial approximation to the integrated state equations between the nodes, whereas direct shooting methods directly integrate state equations. Arguably, the most powerful methods for solving general optimal control problems are direct collocation methods [79]. A direct collocation method is a state and control parameterization method, where the state and control are approximated using a specified functional form. The two most common forms of collocation are local collocation [84] and pseudospectral (global orthogonal) collocation [84]. In optimal control, local collocation has been employed using one of two categories of discretization: Runge–Kutta methods or the orthogonal collocation method [85,86,87]. In the pseudospectral method [88,89], the optimal control problem is transcribed to a non-linear programming problem (NLP) by parameterizing the state and control using global polynomials (basis function are Chebyshev or Lagrange polynomials) and collocating the differential-algebraic equations using nodes obtained from a Gaussian quadrature. The collocation points are the roots of an orthogonal polynomial (such as Chebyshev or Legendre polynomials) and/or a linear combination of an orthogonal polynomial and its derivatives.
4.1. Applications to Aerial Vehicles
4.2. Applications to Ground Vehicles
4.3. Application to Underwater Vehicle
4.4. Summary Numerical Techniques
5. Bio-Inspired Methods

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Seminal Work | Source |
|---|---|---|
| Artificial Neural Network | It is based on Kohonen’s self-organizing maps. | [147,148] |
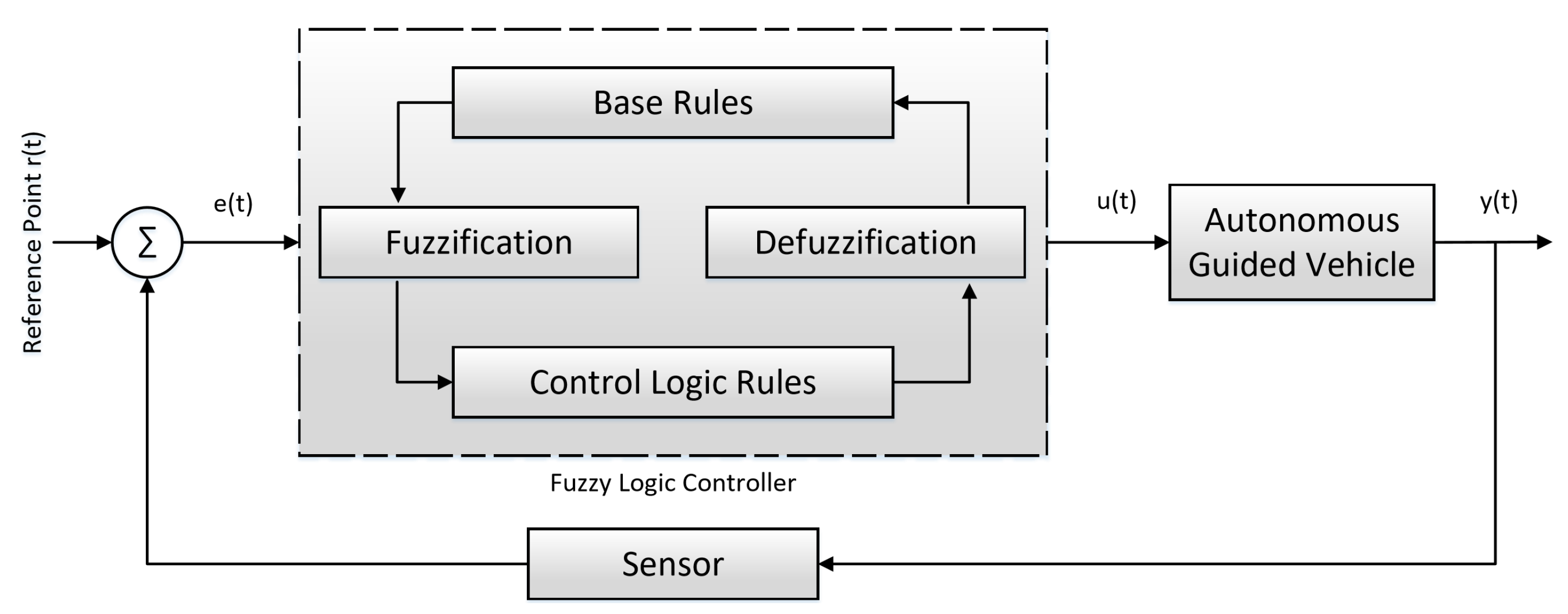
| Fuzzy Logic | Presented by Professor Lofti Zadeh, in 1965, at the University of California, (refer Figure 6). | [147,148] |
| Artificial Bee Colony Algorithm | Proposed by Karaboga, in 2005, for solving optimization problems. The algorithm mimics the bees colony behavior for the food search. They are divided into three groups: (i) employed bees, (ii) onlooker bees, and (iii) scouts. | [149,150,151] |
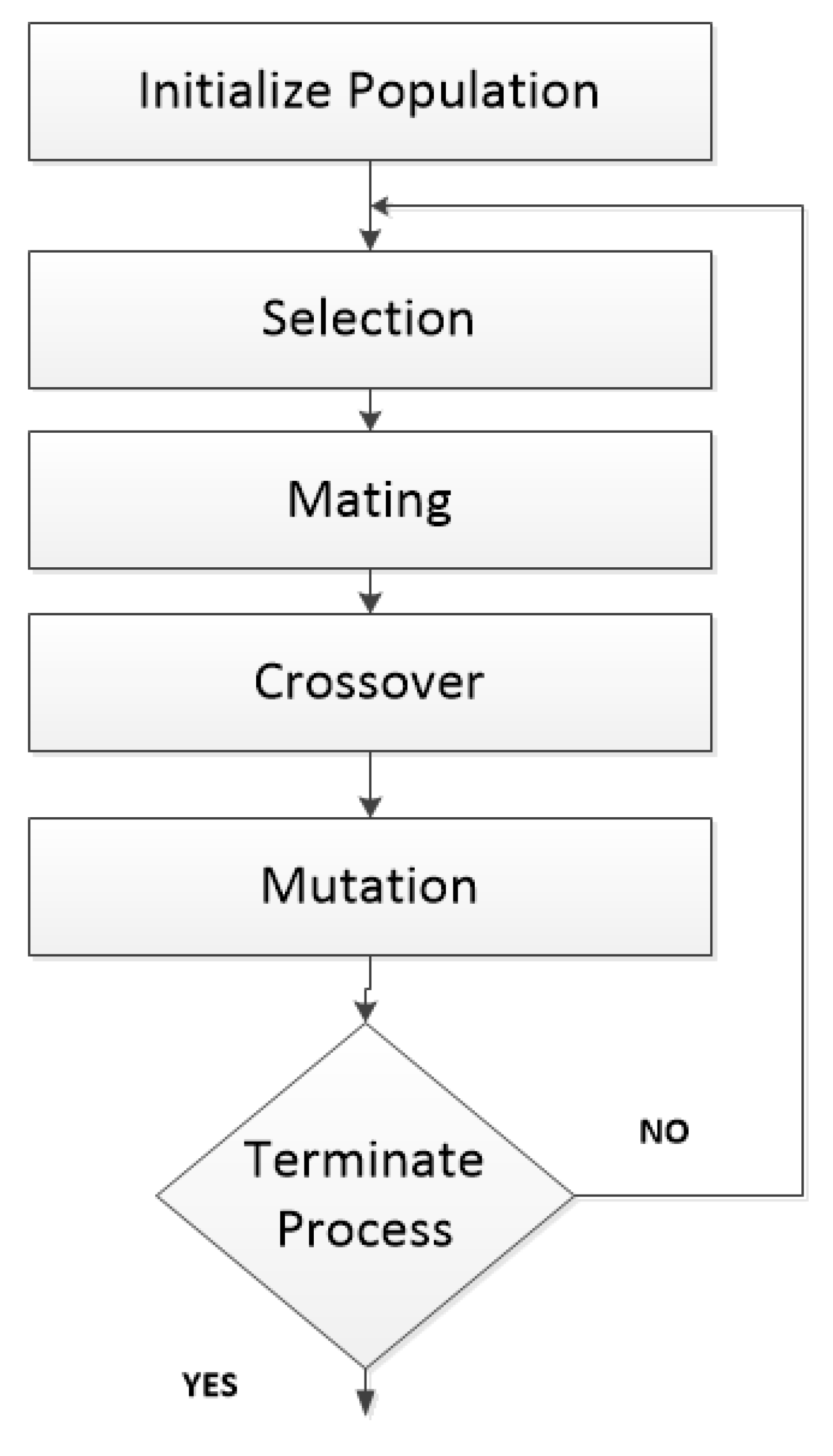
| Genetic Algorithm | Derived from evolutionary algorithms, they involve different operators, e.g., mutation, crossover, and selection operator (refer to Figure 7). | [152,153,154,155,156,157,158,159,160] |
| Simulated Annealing | It is a probabilistic method used for finding the global minimum of a function. It is considered the first metaheuristic algorithm inspired by the physical phenomena happening in the solidification of fluids, such as metals. | [161] |
| Grey Wolf Optimizer | Assessing the nature of wolves, researchers were able to formulate mathematical expressions revealing their social behavior in terms of hierarchy distribution of roles in a pack, hunting, the search for prey, and attacking strategies. | [64,162] |
| Moth Flame Optimization | Inspired by the behavior of moths in nature, its popularity lies in its simple implementation and no derivation involvement in the starting phase with fewer parameters, making it easy to implement and flexible for all kinds of applications. | [69,163] |
| Whale Optimization | The hunting behavior hierarchy of whales inspires Whale Optimization. They out-stand because of their hunting strategy. Their foraging behavior is called the bubble-net feeding method. | [63,164,165] |
| AntLion Optimizer | The life cycle of antlions includes two main phases: larvae and adult. Antlions undergo metamorphosis in a cocoon to become adults. They mostly hunt in larvae, and the adulthood period is for reproduction. | [68] |
5.1. Application to Aerial Vehicles
5.2. Application to Ground Vehicles
5.3. Application to Underwater Vehicles
5.4. Summary Bio-Inspired Techniques
6. Hybrid Algorithms
6.1. Application to Aerial Vehicle
6.2. Application to Ground Vehicles
6.3. Application to Underwater Vehicles
6.4. Summary of Hybrid Techniques
7. Challenges Involved in Path Planning Methods
7.1. Proposed Solutions
7.2. Way Forward
| Algorithm 1 Coordinated Multi-robot exploration with WOA. |
|
8. Conclusions
- Consolidation of available information: A detailed review of the trajectory planning and optimization is presented from the application point of view on ground, aerial, and underwater vehicles. The DARPA challenge 2007 related to robotics, Lord Rayleigh work related to dynamic soaring in 1883, and some extensions related to the underwater vehicle are elaborated. Algorithms, i.e., numerical techniques for implementing the path planning, are discussed.
- Survey of trajectory optimization techniques: A comprehensive overview related to optimization algorithms and numerical techniques that have been utilized for performing trajectory formation and its optimization.
- Problem formulation and generation of optimal trajectories: An explanation of how different algorithms can be integrated to build a mathematical model for planning and the formation of trajectory components can be achieved presented with a literature survey.
- Limitations and a way forward: Though numerous works review robotics, aerial and underwater vehicle systems have been presented together with optimization techniques and numerical methods, and it has been observed no single algorithm produces desired results or accurate output; therefore, a hybridization of different algorithms has been used by researchers. Two optimization algorithms or two numerical methods together can be integrated, or a mix and match of techniques can be achieved for obtaining the desired characteristics results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicles |
| AUV | Autonomous Underwater Vehicles |
| UGVs | Unmanned Ground Vehicles |
| SLAM | Simultaneous Localization and Mapping |
| sUAV | Small Unmanned Aerial Vehicle |
| UAAV | Unmanned Aerial-Aquatic Vehicle |
| ROS | Robot Operating System |
| UUV | Unmanned Underwater Vehicle |
| iCab | Intelligent Campus Auto-mobile |
| TEB | Time Elastic Band |
| GP | Gaussian Process |
| NED | North-West-Down |
| FRU | Front-Right-Up |
| NLP | Non-Linear Programming |
| GESOP | Graphical Environment for Simulation and Optimization |
| ALTOS | Aerospace Launch Trajectory Optimization Software |
| IDVD | Inverse Dynamics in Virtual Domain |
| PSOPT | Pseudo Spectral Optimizer |
| SAK | Smart Adaption Kit |
| GCM | Guidance and Control Module |
| CEP | Circular Error Probable |
| GPS | Global Positioning System |
| LBL | Long Base Line |
| DVL | Doppler Velocity Log |
| IMU | Inertial Measurement Unit |
| EM | Electromagnetic Field |
| MEMS | Micro-Electromechanical Systems |
| AHRS | Attitude Heading Reference System |
| RBO-TMA | Reverse Bearing Only Target Motion Analysis |
| SDC | State-Dependent Coefficient |
| IN | Inertial Navigation |
| PSO | Particle Swarm Optimization |
| GWO | Grey Wolf Optimization |
| ANN | Artificial Neural Network |
| GA | Genetic Algorithm |
| ALO | Ant Lion Optimization |
| WOA | Whale Optimization |
| CNN | Convolutional Neural Network |
| SLI | Sylvester Law of Inertia |
| NSGA II | Non-dominated sorting genetic algorithm II |
| UWG | Underwater Glider |
References
- Li, S.; Yan, J.; Li, L. Automated guided vehicle: The direction of intelligent logistics. In Proceedings of the 2018 IEEE International Conference on Service Operations and Logistics, and Informatics (SOLI), Singapore, 31 July–2 August 2018; pp. 250–255. [Google Scholar]
- Fanti, M.P.; Mangini, A.M.; Pedroncelli, G.; Ukovich, W. A decentralized control strategy for the coordination of AGV systems. Control Eng. Pract. 2018, 70, 86–97. [Google Scholar] [CrossRef]
- Zhong, M.; Yang, Y.; Dessouky, Y.; Postolache, O. Multi-AGV scheduling for conflict-free path planning in automated container terminals. Comput. Ind. Eng. 2020, 142, 106371. [Google Scholar] [CrossRef]
- Masłowski, A. Training in Military Robotics and EOD Unmanned Systems. 2014. Available online: https://www.eodcoe.org/files/en/events/nato-eod-demonstrations-trials-2014/3-nato_eod_trencin-09_2014-maslowski-opt.pdf (accessed on 6 August 2020).
- Vassev, E.; Hinchey, M. Autonomy Requirements Engineering for Space Missions; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Gao, W.; Wang, W.; Zhu, H.; Zhao, S.; Huang, G.; Du, Z. Irradiation test and hardness design for mobile rescue robot in nuclear environment. Ind. Robot. Int. J. Robot. Res. Appl. 2019, 46, 851–862. [Google Scholar] [CrossRef]
- Mir, I.; Akhtar, S.; Eisa, S.; Maqsood, A. Guidance and control of standoff air-to-surface carrier vehicle. Aeronaut. J. 2019, 123, 283–309. [Google Scholar] [CrossRef]
- Mir, I.; Taha, H.; Eisa, S.A.; Maqsood, A. A controllability perspective of dynamic soaring. Nonlinear Dyn. 2018, 94, 2347–2362. [Google Scholar] [CrossRef]
- Mir, I.; Eisa, S.A.; Maqsood, A. Review of dynamic soaring: Technical aspects, nonlinear modeling perspectives and future directions. Nonlinear Dyn. 2018, 94, 3117–3144. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Eisa, S.A.; Taha, H.; Akhtar, S. Optimal morphing–augmented dynamic soaring maneuvers for unmanned air vehicle capable of span and sweep morphologies. Aerosp. Sci. Technol. 2018, 79, 17–36. [Google Scholar] [CrossRef]
- Mir, I.; Eisa, S.A.; Taha, H.E.; Maqsood, A.; Akhtar, S.; Islam, T.U. A stability perspective of bio-inspired UAVs performing dynamic soaring optimally. Bioinspir. Biomim. 2021. [Google Scholar] [CrossRef]
- Fink, J.; Bauwens, V.; Kaplan, F.; Dillenbourg, P. Living with a vacuum cleaning robot. Int. J. Soc. Robot. 2013, 5, 389–408. [Google Scholar] [CrossRef]
- Häne, C.; Heng, L.; Lee, G.H.; Fraundorfer, F.; Furgale, P.; Sattler, T.; Pollefeys, M. 3D visual perception for self-driving cars using a multi-camera system: Calibration, mapping, localization, and obstacle detection. Image Vis. Comput. 2017, 68, 14–27. [Google Scholar] [CrossRef]
- Zhou, C.; Huang, B.; Fränti, P. A survey of motion planning algorithms for intelligent robotics. arXiv 2021, arXiv:2102.02376. [Google Scholar]
- Contreras-Cruz, M.A.; Ayala-Ramirez, V.; Hernandez-Belmonte, U.H. Mobile robot path planning using artificial bee colony and evolutionary programming. Appl. Soft Comput. 2015, 30, 319–328. [Google Scholar] [CrossRef]
- Littlefield, Z.; Bekris, K.E. Efficient and asymptotically optimal kinodynamic motion planning via dominance-informed regions. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar]
- Ganeshmurthy, M.; Suresh, G. Path planning algorithm for autonomous mobile robot in dynamic environment. In Proceedings of the 2015 3rd International Conference on Signal Processing, Communication and Networking (ICSCN), Chennai, India, 26–28 March 2015; pp. 1–6. [Google Scholar]
- Choset, H.M.; Hutchinson, S.; Lynch, K.M.; Kantor, G.; Burgard, W.; Kavraki, L.E.; Thrun, S.; Arkin, R.C. Principles of Robot Motion: Theory, Algorithms, and Implementation; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Aguilar, W.G.; Sandoval, S.; Limaico, A.; Villegas-Pico, M.; Asimbaya, I. Path Planning Based Navigation Using LIDAR for an Ackerman Unmanned Ground Vehicle. In International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 399–410. [Google Scholar]
- Le, A.V.; Nhan, N.H.K.; Mohan, R.E. Evolutionary algorithm-based complete coverage path planning for tetriamond tiling robots. Sensors 2020, 20, 445. [Google Scholar] [CrossRef]
- Thoma, J.; Paudel, D.P.; Chhatkuli, A.; Probst, T.; Gool, L.V. Mapping, localization and path planning for image-based navigation using visual features and map. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 7383–7391. [Google Scholar]
- Krell, E.; Sheta, A.; Balasubramanian, A.P.R.; King, S.A. Collision-free autonomous robot navigation in unknown environments utilizing pso for path planning. J. Artif. Intell. Soft Comput. Res. 2019, 9, 267–282. [Google Scholar] [CrossRef]
- Vis, I.F. Survey of research in the design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 170, 677–709. [Google Scholar] [CrossRef]
- Sanchez-Lopez, J.L.; Wang, M.; Olivares-Mendez, M.A.; Molina, M.; Voos, H. A real-time 3d path planning solution for collision-free navigation of multirotor aerial robots in dynamic environments. J. Intell. Robot. Syst. 2019, 93, 33–53. [Google Scholar] [CrossRef]
- Yi, J.H.; Lu, M.; Zhao, X.J. Quantum inspired monarch butterfly optimisation for UCAV path planning navigation problem. Int. J. Bio-Inspir. Comput. 2020, 15, 75–89. [Google Scholar] [CrossRef]
- Majeed, A.; Lee, S. A new coverage flight path planning algorithm based on footprint sweep fitting for unmanned aerial vehicle navigation in urban environments. Appl. Sci. 2019, 9, 1470. [Google Scholar] [CrossRef]
- Nicholson, J.; Healey, A. The present state of autonomous underwater vehicle (AUV) applications and technologies. Mar. Technol. Soc. J. 2008, 42, 44–51. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Tzafestas, S.G. Mobile robot path, motion, and task planning. In Introduction to Mobile Robot Control; Elsevier: Amsterdam, The Netherlands, 2014; pp. 429–478. [Google Scholar]
- Hall, J.K. GEBCO Centennial Special Issue–Charting the secret world of the ocean floor: The GEBCO project 1903–2003. Mar. Geophys. Res. 2006, 27, 1–5. [Google Scholar] [CrossRef]
- Takács, B.; Dóczi, R.; Süto, B.; Kalló, J.; Várkonyi, T.A.; Haidegger, T.; Kozlovszky, M. Extending AUV response robot capabilities to solve standardized test methods. Acta Polytech. Hung. 2016, 13, 157–170. [Google Scholar]
- Li, J.H.; Kang, H.; Park, G.H.; Suh, J.H. Real time path planning of underwater robots in unknown environment. In Proceedings of the 2017 International Conference on Control, Artificial Intelligence, Robotics & Optimization (ICCAIRO), Prague, Czech Republic, 20–22 May 2017; pp. 312–318. [Google Scholar]
- Wei, M.; Isler, V. Energy-efficient Path Planning for Ground Robots by and Combining Air and Ground Measurements. In Proceedings of the Conference on Robot Learning, Osaka, Japan, 16–18 November 2020; pp. 766–775. [Google Scholar]
- Delmerico, J.; Mueggler, E.; Nitsch, J.; Scaramuzza, D. Active autonomous aerial exploration for ground robot path planning. IEEE Robot. Autom. Lett. 2017, 2, 664–671. [Google Scholar] [CrossRef]
- Marin-Plaza, P.; Hussein, A.; Martin, D.; Escalera, A.d.l. Global and local path planning study in a ROS-based research platform for autonomous vehicles. J. Adv. Transp. 2018, 2018, 6392697. [Google Scholar] [CrossRef]
- Sombolestan, S.; Rasooli, A.; Khodaygan, S. Optimal path-planning for mobile robots to find a hidden target in an unknown environment based on machine learning. J. Ambient Intell. Humaniz. Comput. 2019, 10, 1841–1850. [Google Scholar] [CrossRef]
- Tuncer, A.; Yildirim, M. Design and implementation of a genetic algorithm IP core on an FPGA for path planning of mobile robots. Turk. J. Electr. Eng. Comput. Sci. 2016, 24, 5055–5067. [Google Scholar] [CrossRef]
- Chaari, I.; Koubaa, A.; Bennaceur, H.; Ammar, A.; Alajlan, M.; Youssef, H. Design and performance analysis of global path planning techniques for autonomous mobile robots in grid environments. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416663663. [Google Scholar] [CrossRef]
- Do, C.H.; Lin, H.Y. Differential evolution for optimizing motion planning of mobile robot. In Proceedings of the 2017 IEEE/SICE International Symposium on System Integration (SII), Taipei, Taiwan, 11–14 December 2017; pp. 399–404. [Google Scholar]
- Li, Y.; Cui, R.; Li, Z.; Xu, D. Neural network approximation based near-optimal motion planning with kinodynamic constraints using RRT. IEEE Trans. Ind. Electron. 2018, 65, 8718–8729. [Google Scholar] [CrossRef]
- Kuntz, N.R.; Oh, P.Y. Development of autonomous cargo transport for an unmanned aerial vehicle using visual servoing. In Proceedings of the Dynamic Systems and Control Conference, 20–22 October 2008; pp. 731–738. [Google Scholar]
- O’Young, S.; Hubbard, P. RAVEN: A maritime surveillance project using small UAV. In Proceedings of the 2007 IEEE Conference on Emerging Technologies and Factory Automation (EFTA 2007), Patras, Greece, 25–28 September 2007; pp. 904–907. [Google Scholar]
- Primatesta, S.; Guglieri, G.; Rizzo, A. A risk-aware path planning strategy for uavs in urban environments. J. Intell. Robot. Syst. 2019, 95, 629–643. [Google Scholar] [CrossRef]
- Rochin, F.R.; Yamazoe, H.; Lee, J.H. Autonomous Coverage Path Planning and Navigation Control System for Search Operations using a UAV. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2019; pp. 194–199. [Google Scholar]
- Naazare, M.; Ramos, D.; Wildt, J.; Schulz, D. Application of Graph-based Path Planning for UAVs to Avoid Restricted Areas. In Proceedings of the 2019 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Würzburg, Germany, 2–4 September 2019; pp. 139–144. [Google Scholar]
- Qin, H.; Meng, Z.; Meng, W.; Chen, X.; Sun, H.; Lin, F.; Ang, M.H. Autonomous exploration and mapping system using heterogeneous UAVs and UGVs in GPS-denied environments. IEEE Trans. Veh. Technol. 2019, 68, 1339–1350. [Google Scholar] [CrossRef]
- Kinsey, J.C.; Eustice, R.M.; Whitcomb, L.L. A survey of underwater vehicle navigation: Recent advances and new challenges. In Proceedings of the IFAC Conference of Manoeuvering and Control of Marine Craft., Lisbon, Portugal, 20–22 September 2006; Volume 88, pp. 1–12. [Google Scholar]
- Bertozzi, M.; Broggi, A.; Fascioli, A. Vision-based intelligent vehicles: State of the art and perspectives. Robot. Auton. Syst. 2000, 32, 1–16. [Google Scholar] [CrossRef]
- Franke, U.; Gavrila, D.; Gern, A.; Görzig, S.; Janssen, R.; Paetzold, F.; Wöhler, C. From door to door—Principles and applications of computer vision for driver assistant systems. In Intelligent Vehicle Technologies; Elsevier: Amsterdam, The Netherlands, 2001; pp. 131–188. [Google Scholar]
- Dickmanns, E.D.; Behringer, R.; Dickmanns, D.; Hildebrandt, T.; Maurer, M.; Thomanek, F.; Schiehlen, J. The seeing passenger car’VaMoRs-P’. In Proceedings of the Intelligent Vehicles’ 94 Symposium, Paris, France, 24–26 October 1994; pp. 68–73. [Google Scholar]
- Nagel, H.H.; Enkelmann, W.; Struck, G. FhG-Co-Driver: From map-guided automatic driving by machine vision to a cooperative driver support. Math. Comput. Model. 1995, 22, 185–212. [Google Scholar] [CrossRef]
- Thorpe, C.; Hebert, M.H.; Kanade, T.; Shafer, S.A. Vision and navigation for the Carnegie-Mellon Navlab. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 362–373. [Google Scholar] [CrossRef]
- Wood, G.R. The bisection method in higher dimensions. Math. Program. 1992, 55, 319–337. [Google Scholar] [CrossRef]
- Verbeke, J.; Cools, R. The Newton-Raphson method. Int. J. Math. Educ. Sci. Technol. 1995, 26, 177–193. [Google Scholar] [CrossRef]
- Hull, T.; Enright, W.H.; Jackson, K. Runge-Kutta Research at Toronto. Appl. Numer. Math. 1996, 22, 225–236. [Google Scholar] [CrossRef]
- Noor, M.A.; Noor, K.I.; Al-Said, E.; Waseem, M. Some new iterative methods for nonlinear equations. Math. Probl. Eng. 2010, 2010, 198943. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Nazli Alhady, S.S. A comprehensive study for robot navigation techniques. Cogent Eng. 2019, 6, 1632046. [Google Scholar] [CrossRef]
- Dai, X.; Long, S.; Zhang, Z.; Gong, D. Mobile robot path planning based on ant colony algorithm with A* heuristic method. Front. Neurorobot. 2019, 13, 15. [Google Scholar] [CrossRef]
- Xu, Y.; Fan, P.; Yuan, L. A simple and efficient artificial bee colony algorithm. Math. Probl. Eng. 2013, 2013, 526315. [Google Scholar] [CrossRef]
- Dewang, H.S.; Mohanty, P.K.; Kundu, S. A robust path planning for mobile robot using smart particle swarm optimization. Procedia Comput. Sci. 2018, 133, 290–297. [Google Scholar] [CrossRef]
- Lamini, C.; Benhlima, S.; Elbekri, A. Genetic algorithm based approach for autonomous mobile robot path planning. Procedia Comput. Sci. 2018, 127, 180–189. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Meraihi, Y.; Ramdane-Cherif, A.; Acheli, D.; Mahseur, M. Dragonfly algorithm: A comprehensive review and applications. Neural Comput. Appl. 2020, 32, 16625–16646. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Alabool, H. Salp swarm algorithm: A comprehensive survey. Neural Comput. Appl. 2020, 32, 11195–11215. [Google Scholar] [CrossRef]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef]
- Mirjalili, S. The ant lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Ma, G.; Zhang, Y.; Nee, A. A simulated annealing-based optimization algorithm for process planning. Int. J. Prod. Res. 2000, 38, 2671–2687. [Google Scholar] [CrossRef]
- Brammya, G.; Praveena, S.; Ninu Preetha, N.; Ramya, R.; Rajakumar, B.; Binu, D. Deer hunting optimization algorithm: A new nature-inspired meta-heuristic paradigm. Comput. J. 2019. [Google Scholar] [CrossRef]
- Gao, X.Z.; Govindasamy, V.; Xu, H.; Wang, X.; Zenger, K. Harmony search method: Theory and applications. Comput. Intell. Neurosci. 2015, 2015, 258491. [Google Scholar] [CrossRef]
- Jain, M.; Maurya, S.; Rani, A.; Singh, V. Owl search algorithm: A novel nature-inspired heuristic paradigm for global optimization. J. Intell. Fuzzy Syst. 2018, 34, 1573–1582. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W.; Alhady, S.N.; Ali, A.; Mir, I.; Jalil, A. Meta-heuristic approach for solving multi-objective path planning for autonomous guided robot using PSO—GWO optimization algorithm with evolutionary programming. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 7873–7890. [Google Scholar] [CrossRef]
- Yiqing, L.; Xigang, Y.; Yongjian, L. An improved PSO algorithm for solving non-convex NLP/MINLP problems with equality constraints. Comput. Chem. Eng. 2007, 31, 153–162. [Google Scholar] [CrossRef]
- Huang, W.H.; Fajen, B.R.; Fink, J.R.; Warren, W.H. Visual navigation and obstacle avoidance using a steering potential function. Robot. Auton. Syst. 2006, 54, 288–299. [Google Scholar] [CrossRef]
- Gul, F.; Rahiman, W. An Integrated approach for Path Planning for Mobile Robot Using Bi-RRT. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2019; Volume 697, p. 012022. [Google Scholar]
- Montiel, O.; Orozco-Rosas, U.; Sepúlveda, R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Rao, A.V. A survey of numerical methods for optimal control. Adv. Astronaut. Sci. 2009, 135, 497–528. [Google Scholar]
- Bellman, R. Dynamic Programming. In New Jersey Google Scholar; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Bellman, R. Dynamic programming treatment of the travelling salesman problem. J. ACM (JACM) 1962, 9, 61–63. [Google Scholar] [CrossRef]
- Gerdts, M. Direct shooting method for the numerical solution of higher-index DAE optimal control problems. J. Optim. Theory Appl. 2003, 117, 267. [Google Scholar] [CrossRef]
- Cannataro, B.Ş.; Rao, A.V.; Davis, T.A. State-defect constraint pairing graph coarsening method for Karush–Kuhn–Tucker matrices arising in orthogonal collocation methods for optimal control. Comput. Optim. Appl. 2016, 64, 793–819. [Google Scholar] [CrossRef]
- Huntington, G.T.; Rao, A.V. Comparison of global and local collocation methods for optimal control. J. Guid. Control. Dyn. 2008, 31, 432. [Google Scholar] [CrossRef]
- Schwartz, A.L. Theory and Implementation of Numerical Methods Based on Runge-Kutta Integration for Solving Optimal Control Problems. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1996. [Google Scholar]
- Reddien, G. Collocation at Gauss points as a discretization in optimal control. SIAM J. Control Optim. 1979, 17, 298–306. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Abd Elaziz, M.; Ewees, A.A.; Al-qaness, M.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization Algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Rao, A.V.; Benson, D.A.; Darby, C.; Patterson, M.A.; Francolin, C.; Sanders, I.; Huntington, G.T. Algorithm 902: Gpops, a matlab software for solving multiple-phase optimal control problems using the gauss pseudospectral method. ACM Trans. Math. Softw. (TOMS) 2010, 37, 22. [Google Scholar] [CrossRef]
- Darby, C.L.; Hager, W.W.; Rao, A.V. An hp-adaptive pseudospectral method for solving optimal control problems. Optim. Control Appl. Methods 2011, 32, 476–502. [Google Scholar] [CrossRef]
- Sachs, G.; da Costa, O. Optimization of dynamic soaring at ridges. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference and Exhibit, Austin, TX, USA, 11–14 August 2003; pp. 11–14. [Google Scholar]
- Sachs, G. Minimum shear wind strength required for dynamic soaring of albatrosses. IBIS 2005, 147, 1–10. [Google Scholar] [CrossRef]
- Sachs, G.; Mayrhofer, M. Shear wind strength required for dynamic soaring at ridges. Tech. Soar. 2001, 25, 209–215. [Google Scholar]
- Well, K. Graphical environment for simulation and optimization. In Department of Optimization, Guidance, and Control; Springer: Stuttgart, Germany, 2002. [Google Scholar]
- Wiegand, A. ASTOS User Manual. Unterkirnach Ger. Astos Solut. GmbH 2010, 17, 34–52. [Google Scholar]
- Sachs, G.; Knoll, A.; Lesch, K. Optimal utilization of wind energy for dynamic soaring. Tech. Soar. 1991, 15, 48–55. [Google Scholar]
- Zhao, Y.J. Optimal patterns of glider dynamic soaring. Optim. Control Appl. Methods 2004, 25, 67–89. [Google Scholar] [CrossRef]
- Zhao, Y.J.; Qi, Y.C. Minimum fuel powered dynamic soaring of unmanned aerial vehicles utilizing wind gradients. Optim. Control Appl. Methods 2004, 25, 211–233. [Google Scholar] [CrossRef]
- Gill, P.E.; Murray, W.; Saunders, M.A.; Wright, M.H. User’s Guide for NPSOL (version 4.0): A Fortran Package for Nonlinear Programming; Technical Report; Stanford Univ Ca Systems Optimization LAB: Stanford, CA, USA, 1986. [Google Scholar]
- Akhtar, N. Control System Development for Autonomous Soaring. 2010. Available online: www.dspace.lib.cranfield.ac.uk/handle/1826/6899 (accessed on 6 August 2021).
- Akhtar, N.; Whidborne, J.; Cooke, A. Real-time optimal techniques for unmanned air vehicles fuel saving. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2012, 226, 1315–1328. [Google Scholar] [CrossRef]
- Akhtar, N.; Whidborne, J.F.; Cooke, A.K. Wind shear energy extraction using dynamic soaring techniques. Am. Inst. Aeronaut. Astronaut. AIAA 2009, 734. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Abd Elaziz, M.; Gandomi, A.H. The arithmetic optimization algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Mir, I.; Maqsood, A.; Akhtar, S. Biologically Inspired Dynamic Soaring Maneuvers for an Unmanned Air Vehicle Capable of Sweep Morphing. Int. J. Aeronaut. Space Sci. 2018, 19, 1006–1016. [Google Scholar] [CrossRef]
- Wu, Y.; Gou, J.; Hu, X.; Huang, Y. A new consensus theory-based method for formation control and obstacle avoidance of UAVs. Aerosp. Sci. Technol. 2020, 106332. [Google Scholar] [CrossRef]
- Li, X.; Luo, C.; Xu, Y.; Li, P. A Fuzzy PID controller applied in AGV control system. In Proceedings of the 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 18–20 August 2016; pp. 555–560. [Google Scholar]
- Matveev, A.S.; Wang, C.; Savkin, A.V. Real-time navigation of mobile robots in problems of border patrolling and avoiding collisions with moving and deforming obstacles. Robot. Auton. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.N.; Li, S.J.; Zhu, J. LQR based Trajectory Tracking Control for Forked AGV. In Applied Mechanics and Materials; Trans Tech Publications Ltd: Baech, Switzerland, 2014; Volume 577, pp. 447–451. [Google Scholar]
- Castillo, O.; Aguilar, L.T.; Cárdenas, S. Fuzzy Logic Tracking Control for Unicycle Mobile Robots. Eng. Lett. 2006, 13, 1–5. [Google Scholar]
- Dumitrascu, B.; Filipescu, A.; Minzu, V. Backstepping control of wheeled mobile robots. In Proceedings of the 15th International Conference on System Theory, Control and Computing, Sinaia, Romania, 14–16 October 2011; pp. 1–6. [Google Scholar]
- Gul, F.; Alhady, S.S.N.; Rahiman, W. A review of control algorithm for autonomous guided vehicle. Indones. J. Electr. Eng. Comput. Sci. 2020, 20, 552–562. [Google Scholar] [CrossRef]
- Alsultan, T.; Ali, H.M.; Hamid, Q.Y. A numerical approach for solving problems in robotic arm movement. Prod. Manuf. Res. 2018, 6, 385–395. [Google Scholar]
- Yuan, P.; Su, F.; Shi, Z.; Wang, T.; Chen, D. Autonomous path planning solution for industrial robot manipulator using backpropagation algorithm. Adv. Mech. Eng. 2015, 7, 1687814015619768. [Google Scholar] [CrossRef]
- Majumdar, A.; Ahmadi, A.A.; Tedrake, R. Control design along trajectories with sums of squares programming. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4054–4061. [Google Scholar]
- Saudi, A.; Sulaiman, J. Numerical technique for robot path planning using four Point-EG iterative method. In Proceedings of the 2010 International Symposium on Information Technology, Kuala Lumpur, Malaysia, 15–17 June 2010; Volume 2, pp. 831–836. [Google Scholar]
- Li, J.; Sun, J.; Chen, G. A Multi-Switching Tracking Control Scheme for Autonomous Mobile Robot in Unknown Obstacle Environments. Electronics 2020, 9, 42. [Google Scholar] [CrossRef]
- Leonard, J.J.; Bennett, A.A.; Smith, C.M.; Jacob, H.; Feder, S. Autonomous Underwater Vehicle Navigation. MIT Marine Robotics Laboratory Technical Memorandum. Citeseer. 1998. Available online: www.cml.mit.edu/~jleonard/pubs/techreport981.pdf (accessed on 6 August 2020).
- Leonard, J.J.; Bahr, A. Autonomous underwater vehicle navigation. In Springer Handbook of Ocean Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 341–358. [Google Scholar]
- Bedwell, I. Australian Sonar Transducer Technology. Available online: https://www.academia.edu/download/62864992/Bedwell_Australian_Sonar_Transducer_Technology_120200407-14290-1e51qex.pdf (accessed on 20 November 2013).
- Miller, P.A.; Farrell, J.A.; Zhao, Y.; Djapic, V. Autonomous underwater vehicle navigation. IEEE J. Ocean. Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Bobkov, V.; Kudryashov, A.; Melman, S.; Scherbatyuk, A. Visual navigation and 3D reconstruction of underwater objects with autonomous underwater vehicle. In Proceedings of the 2017 24th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), St. Petersburg, Russia, 29–31 May 2017; pp. 1–5. [Google Scholar]
- Pérez-Alcocer, R.; Torres-Méndez, L.A.; Olguín-Díaz, E.; Maldonado-Ramírez, A.A. Vision-based autonomous underwater vehicle navigation in poor visibility conditions using a model-free robust control. J. Sens. 2016, 2016, 8594096. [Google Scholar] [CrossRef]
- Ko, N.Y.; Choi, H.T.; Lee, C.M.; Moon, Y.S. Attitude estimation using depth measurement and AHRS data for underwater vehicle navigation. In Proceedings of the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar]
- Alexandri, T.; Diamant, R. A reverse bearings only target motion analysis for autonomous underwater vehicle navigation. IEEE Trans. Mob. Comput. 2018, 18, 494–506. [Google Scholar] [CrossRef]
- Frese, U.; Büscher, D.; Burgard, W. Novel Directions for Autonomous Underwater Vehicle Navigation in Confined Spaces. In AI Technology for Underwater Robots; Springer: Berlin/Heidelberg, Germany, 2020; pp. 157–168. [Google Scholar]
- Chen, D.; Neusypin, K.; Selezneva, M. Correction Algorithm for the Navigation System of an Autonomous Unmanned Underwater Vehicle. Sensors 2020, 20, 2365. [Google Scholar] [CrossRef]
- Gao, X.Z.; Hou, Z.X.; Guo, Z.; Fan, R.F.; Chen, X.Q. Analysis and design of guidance-strategy for dynamic soaring with UAVs. Control Eng. Pract. 2014, 32, 218–226. [Google Scholar] [CrossRef]
- Benson, D.A.; Huntington, G.T.; Thorvaldsen, T.P.; Rao, A.V. Direct trajectory optimization and costate estimation via an orthogonal collocation method. J. Guid. Control. Dyn. 2006, 29, 1435–1440. [Google Scholar] [CrossRef]
- Garg, D.; Patterson, M.A.; Francolin, C.; Darby, C.L.; Huntington, G.T.; Hager, W.W.; Rao, A.V. Direct trajectory optimization and costate estimation of finite-horizon and infinite-horizon optimal control problems using a Radau pseudospectral method. Comput. Optim. Appl. 2011, 49, 335–358. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.; Wang, J. Sequential convex programming for nonlinear optimal control problems in UAV path planning. Aerosp. Sci. Technol. 2018, 76, 280–290. [Google Scholar] [CrossRef]
- Abdelkawy, M.; Lopes, A.M.; Babatin, M.M. Shifted fractional Jacobi collocation method for solving fractional functional differential equations of variable order. Chaos Solitons Fractals 2020, 134, 109721. [Google Scholar] [CrossRef]
- Zollars, M.D.; Cobb, R.G. Simplex Methods for Optimal Control of Unmanned Aircraft Flight Trajectories. In Dynamic Systems and Control Conference; American Society of Mechanical Engineers: New York, NY, USA, 2017; Volume 58295, p. V003T39A001. [Google Scholar]
- Masehian, E.; Amin-Naseri, M. A voronoi diagram-visibility graph-potential field compound algorithm for robot path planning. J. Robot. Syst. 2004, 21, 275–300. [Google Scholar] [CrossRef]
- Majeed, A.; Lee, S. A fast global flight path planning algorithm based on space circumscription and sparse visibility graph for unmanned aerial vehicle. Electronics 2018, 7, 375. [Google Scholar] [CrossRef]
- Mammarella, M.; Capello, E. A robust MPC-based autopilot for mini UAVs. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 1227–1235. [Google Scholar]
- Hemakumara, P.; Sukkarieh, S. Non-parametric UAV system identification with dependent Gaussian processes. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 4435–4441. [Google Scholar]
- Zou, Y.; Zhang, H.; He, W. Adaptive Coordinated Formation Control of Heterogeneous Vertical Takeoff and Landing UAVs Subject to Parametric Uncertainties. IEEE Trans. Cybern. 2020, 1–12. [Google Scholar] [CrossRef]
- Siddique, N.; Adeli, H. Nature inspired computing: An overview and some future directions. Cogn. Comput. 2015, 7, 706–714. [Google Scholar] [CrossRef]
- Zhang, Y.; Guan, G.; Pu, X. The robot path planning based on improved artificial fish swarm algorithm. Math. Probl. Eng. 2016, 2016, 3297585. [Google Scholar] [CrossRef]
- Wang, H.J.; Fu, Y.; Zhao, Z.Q.; Yue, Y.J. An Improved Ant Colony Algorithm of Robot Path Planning for Obstacle Avoidance. J. Robot. 2019, 2019, 6097591. [Google Scholar] [CrossRef]
- Saffari, M.; Mahjoob, M. Bee colony algorithm for real-time optimal path planning of mobile robots. In Proceedings of the 2009 Fifth International Conference on Soft Computing, Computing with Words and Perceptions in System Analysis, Decision and Control, Famagusta, North Cyprus, 2–4 September 2009; pp. 1–4. [Google Scholar]
- Dao, T.K.; Pan, T.S.; Pan, J.S. A multi-objective optimal mobile robot path planning based on whale optimization algorithm. In Proceedings of the2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 337–342. [Google Scholar]
- Tsai, P.W.; Dao, T.K. Robot path planning optimization based on multiobjective grey wolf optimizer. In International Conference on Genetic and Evolutionary Computing; Springer: Berlin/Heidelberg, Germany, 2016; pp. 166–173. [Google Scholar]
- Guo, J.; Gao, Y.; Cui, G. The path planning for mobile robot based on bat algorithm. Int. J. Autom. Control 2015, 9, 50–60. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-Inspired Metaheuristic Algorithms; Luniver Press: Bristol, UK, 2010. [Google Scholar]
- Chaturvedi, D. Soft Computing Techniques and Their Applications. In Mathematical Models, Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2015; pp. 31–40. [Google Scholar]
- Wang, P.; Gao, S.; Li, L.; Sun, B.; Cheng, S. Obstacle avoidance path planning design for autonomous driving vehicles based on an improved artificial potential field algorithm. Energies 2019, 12, 2342. [Google Scholar] [CrossRef]
- Surmann, H.; Kanstein, A.; Goser, K. Self-Organizing and Genetic Algorithms for an Automatic Design of Fuzzy Control and Decision Systems. In Proceedings of the EUFIT’93; Citeseer: Princeton, NJ, USA, 1993. [Google Scholar]
- Payne, D.; Stern, J. Wavelength-switched passively coupled single-mode optical network. In Proceedings of the IOOC-ECOC, Venezia, Italy, 1–4 October 1985; Volume 85, p. 585. [Google Scholar]
- Karaboga, D.; Akay, B. A comparative study of artificial bee colony algorithm. Appl. Math. Comput. 2009, 214, 108–132. [Google Scholar] [CrossRef]
- Baykasoğlu, A.; Özbakır, L.; Tapkan, P. Artificial Bee Colony Algorithm and Its Application to Generalized Assignment Problem Swarm Intelligence Focus on Ant and Particle Swarm Optimization. 17 December 2007. Available online: www.10.5772/5101 (accessed on 6 August 2021).
- Kamil, R.T.; Mohamed, M.J.; Oleiwi, B.K. Path Planning of Mobile Robot Using Improved Artificial Bee Colony Algorithm. Eng. Technol. J. 2020, 38, 1384–1395. [Google Scholar] [CrossRef]
- Ismail, A.; Sheta, A.; Al-Weshah, M. A mobile robot path planning using genetic algorithm in static environment. J. Comput. Sci. 2008, 4, 341–344. [Google Scholar]
- Mitchell, M. An Introduction to Genetic Algorithms; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Xin, D.; Hua-hua, C.; Wei-kang, G. Neural network and genetic algorithm based global path planning in a static environment. J. Zhejiang Univ.-Sci. A 2005, 6, 549–554. [Google Scholar] [CrossRef]
- Li, J.; Deng, G.; Luo, C.; Lin, Q.; Yan, Q.; Ming, Z. A hybrid path planning method in unmanned air/ground vehicle (UAV/UGV) cooperative systems. IEEE Trans. Veh. Technol. 2016, 65, 9585–9596. [Google Scholar] [CrossRef]
- Lee, J.; Kang, B.Y.; Kim, D.W. Fast genetic algorithm for robot path planning. Electron. Lett. 2013, 49, 1449–1451. [Google Scholar] [CrossRef]
- Tian, L.; Collins, C. An effective robot trajectory planning method using a genetic algorithm. Mechatronics 2004, 14, 455–470. [Google Scholar] [CrossRef]
- Han, W.G.; Baek, S.M.; Kuc, T.Y. Genetic algorithm based path planning and dynamic obstacle avoidance of mobile robots. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; Volume 3, pp. 2747–2751. [Google Scholar]
- Châari, I.; Koubaa, A.; Bennaceur, H.; Trigui, S.; Al-Shalfan, K. SmartPATH: A hybrid ACO-GA algorithm for robot path planning. In Proceedings of the 2012 IEEE congress on evolutionary computation, Brisbane, QLD, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Geisler, T.; Manikas, T.W. Autonomous robot navigation system using a novel value encoded genetic algorithm. In Proceedings of the 2002 45th Midwest Symposium on Circuits and Systems, 2002, MWSCAS-2002, Tulsa, OK, USA, 4–7 August 2002; Volume 3, p. III. [Google Scholar]
- Liu, K.; Zhang, M. Path planning based on simulated annealing ant colony algorithm. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; Volume 2, pp. 461–466. [Google Scholar]
- Zhang, S.; Zhou, Y.; Li, Z.; Pan, W. Grey wolf optimizer for unmanned combat aerial vehicle path planning. Adv. Eng. Softw. 2016, 99, 121–136. [Google Scholar] [CrossRef]
- Hussien, A.G.; Amin, M.; Abd El Aziz, M. A comprehensive review of moth-flame optimisation: Variants, hybrids, and applications. J. Exp. Theor. Artif. Intell. 2020, 32, 705–725. [Google Scholar] [CrossRef]
- Watkins, W.A.; Schevill, W.E. Aerial observation of feeding behavior in four baleen whales: Eubalaena glacialis, Balaenoptera borealis, Megaptera novaeangliae, and Balaenoptera physalus. J. Mammal. 1979, 60, 155–163. [Google Scholar] [CrossRef]
- Goldbogen, J.A.; Friedlaender, A.S.; Calambokidis, J.; Mckenna, M.F.; Simon, M.; Nowacek, D.P. Integrative approaches to the study of baleen whale diving behavior, feeding performance, and foraging ecology. BioScience 2013, 63, 90–100. [Google Scholar] [CrossRef]
- Silva Arantes, J.d.; Silva Arantes, M.d.; Motta Toledo, C.F.; Júnior, O.T.; Williams, B.C. Heuristic and genetic algorithm approaches for UAV path planning under critical situation. Int. J. Artif. Intell. Tools 2017, 26, 1760008. [Google Scholar] [CrossRef]
- Qu, C.; Gai, W.; Zhang, J.; Zhong, M. A novel hybrid grey wolf optimizer algorithm for unmanned aerial vehicle (UAV) path planning. Knowl.-Based Syst. 2020, 194, 105530. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- Soundarya, M.; Anusha, D.K.; Rohith, P.; Panneerselvam, K.; Srinivasan, S. Optimal path planning of UAV using grey wolf optimiser. Int. J. Comput. Syst. Eng. 2019, 5, 129–136. [Google Scholar]
- Shamsfakhr, F.; Bigham, B.S. A neural network approach to navigation of a mobile robot and obstacle avoidance in dynamic and unknown environments. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 1629–1642. [Google Scholar] [CrossRef]
- Ran, L.; Zhang, Y.; Zhang, Q.; Yang, T. Convolutional neural network-based robot navigation using uncalibrated spherical images. Sensors 2017, 17, 1341. [Google Scholar] [CrossRef] [PubMed]
- Singh, N.H.; Thongam, K. Neural network-based approaches for mobile robot navigation in static and moving obstacles environments. Intell. Serv. Robot. 2019, 12, 55–67. [Google Scholar] [CrossRef]
- Almasri, M.M.; Elleithy, K.M.; Alajlan, A.M. Development of efficient obstacle avoidance and line following mobile robot with the integration of fuzzy logic system in static and dynamic environments. In Proceedings of the 2016 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Farmingdale, NY, USA, 29 April 2016; pp. 1–6. [Google Scholar]
- Ibrahim, M.I.; Sariff, N.; Johari, J.; Buniyamin, N. Mobile robot obstacle avoidance in various type of static environments using fuzzy logic approach. In Proceedings of the 2014 2nd International Conference on Electrical, Electronics and System Engineering (ICEESE), Kuala Lumpur, Malaysia, 9–10 December 2014; pp. 83–88. [Google Scholar]
- Dirik, M.; Castillo, O.; Kocamaz, A.F. Visual-servoing based global path planning using interval type-2 fuzzy logic control. Axioms 2019, 8, 58. [Google Scholar] [CrossRef]
- Yan, Y.; Li, Y. Mobile robot autonomous path planning based on fuzzy logic and filter smoothing in dynamic environment. In Proceedings of the 2016 12th World congress on intelligent control and automation (WCICA), Guilin, China, 12–15 June 2016; pp. 1479–1484. [Google Scholar]
- Patle, B.; Parhi, D.; Jagadeesh, A.; Kashyap, S.K. Matrix-Binary Codes based Genetic Algorithm for path planning of mobile robot. Comput. Electr. Eng. 2018, 67, 708–728. [Google Scholar] [CrossRef]
- Rath, A.K.; Parhi, D.R.; Das, H.C.; Kumar, P.B.; Muni, M.K.; Salony, K. Path optimization for navigation of a humanoid robot using hybridized fuzzy-genetic algorithm. Int. J. Intell. Unmanned Syst. 2019, 7. [Google Scholar] [CrossRef]
- Bakdi, A.; Hentout, A.; Boutami, H.; Maoudj, A.; Hachour, O.; Bouzouia, B. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot. Auton. Syst. 2017, 89, 95–109. [Google Scholar] [CrossRef]
- Nazarahari, M.; Khanmirza, E.; Doostie, S. Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 2019, 115, 106–120. [Google Scholar] [CrossRef]
- Darwish, A.H.; Joukhadar, A.; Kashkash, M. Using the Bees Algorithm for wheeled mobile robot path planning in an indoor dynamic environment. Cogent Eng. 2018, 5, 1426539. [Google Scholar] [CrossRef]
- Liang, J.H.; Lee, C.H. Efficient collision-free path-planning of multiple mobile robots system using efficient artificial bee colony algorithm. Adv. Eng. Softw. 2015, 79, 47–56. [Google Scholar] [CrossRef]
- Wu, H.S.; Zhang, F.M. Wolf pack algorithm for unconstrained global optimization. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Liu, C.; Yan, X.; Liu, C.; Wu, H. The wolf colony algorithm and its application. Chin. J. Electron. 2011, 20, 212–216. [Google Scholar]
- Mittal, N.; Singh, U.; Sohi, B.S. Modified grey wolf optimizer for global engineering optimization. Appl. Comput. Intell. Soft Comput. 2016, 2016, 7950348. [Google Scholar] [CrossRef]
- Li, L.; Sun, L.; Guo, J.; Qi, J.; Xu, B.; Li, S. Modified discrete grey wolf optimizer algorithm for multilevel image thresholding. Comput. Intell. Neurosci. 2017, 2017, 3295769. [Google Scholar] [CrossRef]
- Mirjalili, S.; Saremi, S.; Mirjalili, S.M.; Coelho, L.d.S. Multi-objective grey wolf optimizer: A novel algorithm for multi-criterion optimization. Expert Syst. Appl. 2016, 47, 106–119. [Google Scholar] [CrossRef]
- Singh, N.; Singh, S. Hybrid algorithm of particle swarm optimization and grey wolf optimizer for improving convergence performance. J. Appl. Math. 2017, 2017, 2030489. [Google Scholar] [CrossRef]
- Muro, C.; Escobedo, R.; Spector, L.; Coppinger, R. Wolf-pack (Canis lupus) hunting strategies emerge from simple rules in computational simulations. Behav. Process. 2011, 88, 192–197. [Google Scholar] [CrossRef]
- Rodríguez, L.; Castillo, O.; Soria, J.; Melin, P.; Valdez, F.; Gonzalez, C.I.; Martinez, G.E.; Soto, J. A fuzzy hierarchical operator in the grey wolf optimizer algorithm. Appl. Soft Comput. 2017, 57, 315–328. [Google Scholar] [CrossRef]
- Jalali, S.M.J.; Hedjam, R.; Khosravi, A.; Heidari, A.A.; Mirjalili, S.; Nahavandi, S. Autonomous robot navigation using moth-flame-based neuroevolution. In Evolutionary Machine Learning Techniques; Springer: Berlin/Heidelberg, Germany, 2020; pp. 67–83. [Google Scholar]
- Jalali, S.M.J.; Khosravi, A.; Kebria, P.M.; Hedjam, R.; Nahavandi, S. Autonomous robot navigation system using the evolutionary multi-verse optimizer algorithm. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 1221–1226. [Google Scholar]
- Gharehchopogh, F.S.; Gholizadeh, H. A comprehensive survey: Whale Optimization Algorithm and its applications. Swarm Evol. Comput. 2019, 48, 1–24. [Google Scholar] [CrossRef]
- Chhillar, A.; Choudhary, A. Mobile Robot Path Planning Based Upon Updated Whale Optimization Algorithm. In Proceedings of the 2020 10th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 29–31 January 2020; pp. 684–691. [Google Scholar]
- Zhenxing, Z.; Rennong, Y.; Huanyu, L.; Yuhuan, F.; Zhenyu, H.; Ying, Z. Antlion optimizer algorithm based on chaos search and its application. J. Syst. Eng. Electron. 2019, 30, 352–365. [Google Scholar]
- Rout, A.; Mahanta, G.B.; Bbvl, D.; Biswal, B.B. Kinematic and Dynamic Optimal Trajectory Planning of Industrial Robot Using Improved Multi-objective Ant Lion Optimizer. J. Inst. Eng. (India) Ser. 2020, 101, 559–569. [Google Scholar] [CrossRef]
- Lucas, C.; Hernández-Sosa, D.; Greiner, D.; Zamuda, A.; Caldeira, R. An Approach to Multi-Objective Path Planning Optimization for Underwater Gliders. Sensors 2019, 19, 5506. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Mao, Z.; Wang, T.; Qin, J.; Ding, W.; Meng, X. Obstacle avoidance path planning of unmanned submarine vehicle in ocean current environment based on improved firework-ant colony algorithm. Comput. Electr. Eng. 2020, 87, 106773. [Google Scholar] [CrossRef]
- Huo, L.; Zhu, J.; Wu, G.; Li, Z. A Novel Simulated Annealing Based Strategy for Balanced UAV Task Assignment and Path Planning. Sensors 2020, 20, 4769. [Google Scholar] [CrossRef]
- Ni, J.; Wu, L.; Wang, S.; Wang, K. 3D real-time path planning for AUV based on improved bio-inspired neural network. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Nantou, Taiwan, 27–29 May 2016; pp. 1–2. [Google Scholar]
- Xudong, T.; Yongjie, P.; Ye, L.; Zaibai, Q. A fuzzy neural networks controller of underwater vehicles based on ant colony algorithm. In Proceedings of the 2008 27th Chinese Control Conference, Kunming, China, 16–18 July 2008; pp. 637–641. [Google Scholar]
- Castillo, O. Bio-inspired optimization of type-2 fuzzy controllers in autonomous mobile robot navigation. In Advanced Control Techniques in Complex Engineering Systems: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 187–200. [Google Scholar]
- Lagunes, M.L.; Castillo, O.; Soria, J. Methodology for the optimization of a fuzzy controller using a bio-inspired algorithm. In North American Fuzzy Information Processing Society Annual Conference; Springer: Berlin/Heidelberg, Germany, 2017; pp. 131–137. [Google Scholar]
- Yu, J.; Liu, J.; Wu, Z.; Fang, H. Depth control of a bioinspired robotic dolphin based on sliding-mode fuzzy control method. IEEE Trans. Ind. Electron. 2017, 65, 2429–2438. [Google Scholar] [CrossRef]
- Soliman, M.; Azar, A.T.; Saleh, M.A.; Ammar, H.H. Path planning control for 3-omni fighting robot using PID and fuzzy logic controller. In International Conference on Advanced Machine Learning Technologies and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 442–452. [Google Scholar]
- Li, X.; Choi, B.J. Design of obstacle avoidance system for mobile robot using fuzzy logic systems. Int. J. Smart Home 2013, 7, 321–328. [Google Scholar]
- Li, Y.; Zhu, X.; Liu, J. An Improved Moth-Flame Optimization Algorithm for Engineering Problems. Symmetry 2020, 12, 1234. [Google Scholar] [CrossRef]
- Ilango, H.S.; Ramanathan, R. A Performance Study of Bio-Inspired Algorithms in Autonomous Landing of Unmanned Aerial Vehicle. Procedia Comput. Sci. 2020, 171, 1449–1458. [Google Scholar] [CrossRef]
- Tariq, R.; Iqbal, Z.; Aadil, F. IMOC: Optimization Technique for Drone-Assisted VANET (DAV) Based on Moth Flame Optimization. Wirel. Commun. Mob. Comput. 2020, 2020, 8860646. [Google Scholar] [CrossRef]
- Arantes, M.d.S.; Arantes, J.d.S.; Toledo, C.F.M.; Williams, B.C. A hybrid multi-population genetic algorithm for UAV path planning. In Proceedings of the Genetic and Evolutionary Computation Conference, New York, NY, USA, 20–24 July 2016; pp. 853–860. [Google Scholar]
- Duan, H.; Luo, Q.; Shi, Y.; Ma, G. ? hybrid particle swarm optimization and genetic algorithm for multi-UAV formation reconfiguration. IEEE Comput. Intell. Mag. 2013, 8, 16–27. [Google Scholar] [CrossRef]
- Goudos, S.K.; Tsoulos, G.V.; Athanasiadou, G.; Batistatos, M.C.; Zarbouti, D.; Psannis, K.E. Artificial neural network optimal modeling and optimization of UAV measurements for mobile communications using the L-SHADE algorithm. IEEE Trans. Antennas Propag. 2019, 67, 4022–4031. [Google Scholar] [CrossRef]
- Dong, Z.; Chen, Z.; Zhou, R.; Zhang, R. A hybrid approach of virtual force and Astar search algorithm for UAV path re-planning. In 2011 6th IEEE Conference on Industrial Electronics and Applications; IEEE: Piscataway Township, NJ, USA, 2011; pp. 1140–1145. [Google Scholar]
- Wang, H.; Duan, J.; Wang, M.; Zhao, J.; Dong, Z. Research on robot path planning based on fuzzy neural network algorithm. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 1800–1803. [Google Scholar]
- Zhang, P.; Xiong, C.; Li, W.; Du, X.; Zhao, C. Path planning for mobile robot based on modified rapidly exploring random tree method and neural network. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418784221. [Google Scholar] [CrossRef]
- Pradhan, B.; Nandi, A.; Hui, N.B.; Roy, D.S.; Rodrigues, J.J. A Novel Hybrid Neural Network-Based Multirobot Path Planning With Motion Coordination. IEEE Trans. Veh. Technol. 2019, 69, 1319–1327. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, M.; Guo, C. Research on Vision Navigation Technology of Porter Based on Improved Simulated Annealing Algorithms. In International Conference on Applications and Techniques in Cyber Security and Intelligence; Springer: Berlin/Heidelberg, Germany, 2019; pp. 642–649. [Google Scholar]
- Wang, D.; Chen, S.; Zhang, Y.; Liu, L. Path planning of mobile robot in dynamic environment: Fuzzy artificial potential field and extensible neural network. Artif. Life Robot. 2020, 1–11. [Google Scholar] [CrossRef]
- Zhu, D.; Tian, C.; Sun, B.; Luo, C. Complete coverage path planning of autonomous underwater vehicle based on GBNN algorithm. J. Intell. Robot. Syst. 2019, 94, 237–249. [Google Scholar] [CrossRef]
- Kumari, S.; Mishra, P.K.; Anand, V. Fault resilient routing based on moth flame optimization scheme for underwater wireless sensor networks. Wirel. Netw. 2020, 26, 1417–1431. [Google Scholar] [CrossRef]
- Chen, W.; Rahmati, M.; Sadhu, V.; Pompili, D. Real-time Image Enhancement for Vision-based Autonomous Underwater Vehicle Navigation in Murky Waters. In Proceedings of the International Conference on Underwater Networks & Systems, Atlanta, GA, USA, 23–25 October 2019; pp. 1–8. [Google Scholar]
- Zhu, A.; Yang, S.X. Neurofuzzy-based approach to mobile robot navigation in unknown environments. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 610–621. [Google Scholar] [CrossRef]
- Dutta, S. Obstacle avoidance of mobile robot using PSO-based neuro fuzzy technique. Int. J. Comput. Sci. Eng. 2010, 2, 301–304. [Google Scholar]
- Obe, O.; Dumitrache, I. Adaptive neuro-fuzzy controler with genetic training for mobile robot control. Int. J. Comput. Commun. Control 2012, 7, 135–146. [Google Scholar] [CrossRef]
- Jeffril, M.A.; Sariff, N. The integration of fuzzy logic and artificial neural network methods for mobile robot obstacle avoidance in a static environment. In Proceedings of the 2013 IEEE 3rd International Conference on System Engineering and Technology, Shah Alam, Malaysia, 19–20 August 2013; pp. 325–330. [Google Scholar]
- Juang, C.F.; Chang, Y.C. Evolutionary-group-based particle-swarm-optimized fuzzy controller with application to mobile-robot navigation in unknown environments. IEEE Trans. Fuzzy Syst. 2011, 19, 379–392. [Google Scholar] [CrossRef]
- Schmidt, K.W.; Boutalis, Y.S. Fuzzy discrete event systems for multiobjective control: Framework and application to mobile robot navigation. IEEE Trans. Fuzzy Syst. 2012, 20, 910–922. [Google Scholar] [CrossRef]
- Maeda, M.; Maeda, Y.; Murakami, S. Fuzzy drive control of an autonomous mobile robot. Fuzzy Sets Syst. 1991, 39, 195–204. [Google Scholar] [CrossRef]
- AbuBaker, A. A novel mobile robot navigation system using neuro-fuzzy rule-based optimization technique. Res. J. Appl. Sci. Eng. Technol. 2012, 4, 2577–2583. [Google Scholar]
- Algabri, M.; Mathkour, H.; Ramdane, H. Mobile robot navigation and obstacle-avoidance using ANFIS in unknown environment. Int. J. Comput. Appl. 2014, 91. Available online: research.ijcaonline.org/volume91/number14/pxc3895400.pdf (accessed on 6 August 2021). [CrossRef]
- Mohanty, P.K.; Parhi, D.R. Path planning strategy for mobile robot navigation using MANFIS controller. In Proceedings of the International Conference on Frontiers of Intelligent Computing: Theory and Applications (FICTA) 2013; Springer: Berlin/Heidelberg, Germany, 2014; pp. 353–361. [Google Scholar]
- Alves, R.M.; Lopes, C.R. Obstacle avoidance for mobile robots: A hybrid intelligent system based on fuzzy logic and artificial neural network. In Proceedings of the 2016 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Vancouver, BC, Canada, 24–29 July 2016; pp. 1038–1043. [Google Scholar]
- Zhou, Y.; Er, M.J. Self-learning in obstacle avoidance of a mobile robot via dynamic self-generated fuzzy Q-learning. In Proceedings of the 2006 International Conference on Computational Inteligence for Modelling Control and Automation and International Conference on Intelligent Agents Web Technologies and International Commerce (CIMCA’06), Sydney, Australia, 28 November–1 December 2006; p. 116. [Google Scholar]
- Jouffe, L. Fuzzy inference system learning by reinforcement methods. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 1998, 28, 338–355. [Google Scholar] [CrossRef]
- Er, M.J.; Deng, C. Online tuning of fuzzy inference systems using dynamic fuzzy Q-learning. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2004, 34, 1478–1489. [Google Scholar] [CrossRef]
- Lagisetty, R.; Philip, N.; Padhi, R.; Bhat, M. Object detection and obstacle avoidance for mobile robot using stereo camera. In Proceedings of the 2013 IEEE International Conference on Control Applications (CCA), Hyderabad, India, 28–30 August 2013; pp. 605–610. [Google Scholar]
- Fulgenzi, C.; Spalanzani, A.; Laugier, C. Dynamic obstacle avoidance in uncertain environment combining PVOs and occupancy grid. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1610–1616. [Google Scholar]
- Michels, J.; Saxena, A.; Ng, A.Y. High speed obstacle avoidance using monocular vision and reinforcement learning. In Proceedings of the 22nd International Conference on Machine Learning, Bonn, Germany, 7–11 August 2005; pp. 593–600. [Google Scholar]
- Matveev, A.S.; Hoy, M.C.; Savkin, A.V. A globally converging algorithm for reactive robot navigation among moving and deforming obstacles. Automatica 2015, 54, 292–304. [Google Scholar] [CrossRef]
- Seraji, H.; Howard, A. Behavior-based robot navigation on challenging terrain: A fuzzy logic approach. IEEE Trans. Robot. Autom. 2002, 18, 308–321. [Google Scholar] [CrossRef]
- Sharma, P.S.; Chitaliya, D. Obstacle avoidance using stereo vision: A survey. Int. J. Innov. Res. Comput. Commun. Eng. 2015, 3, 24–29. [Google Scholar] [CrossRef]
- Typiak, A. Use of laser rangefinder to detecting in surroundings of mobile robot the obstacles. In Proceedings of the Symposium on Automation and Robotics in Construction, Vilnius, Lithuania, 26–29 June 2008; pp. 26–29. [Google Scholar]
- Baldoni, P.D.; Yang, Y.; Kim, S.Y. Development of efficient obstacle avoidance for a mobile robot using fuzzy Petri nets. In Proceedings of the 2016 IEEE 17th International Conference on Information Reuse and Integration (IRI), Pittsburgh, PA, USA, 28–30 July 2016; pp. 265–269. [Google Scholar]
- Yang, J.; Chen, P.; Rong, H.J.; Chen, B. Least mean p-power extreme learning machine for obstacle avoidance of a mobile robot. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 1968–1976. [Google Scholar]
- Haykin, S.; Network, N. A comprehensive foundation. Neural Netw. 2004, 2, 41. [Google Scholar]
- Sun, B.; Han, D.; Wei, Q. Application of Rolling Window Algorithm to the Robot Path Planning. Comput. Simul. 2006, 23, 159–162. [Google Scholar]
- Syed, U.A.; Kunwar, F.; Iqbal, M. Guided Autowave Pulse Coupled Neural Network (GAPCNN) based real time path planning and an obstacle avoidance scheme for mobile robots. Robot. Auton. Syst. 2014, 62, 474–486. [Google Scholar] [CrossRef]
- Al-Mutib, K.; Abdessemed, F.; Faisal, M.; Ramdane, H.; Alsulaiman, M.; Bencherif, M. Obstacle avoidance using wall-following strategy for indoor mobile robots. In Proceedings of the 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Ipoh, Malaysia, 25–27 September 2016; pp. 1–6. [Google Scholar]
- Ahmed, A.A.; Abdalla, T.Y.; Abed, A.A. Path planning of mobile robot by using modified optimized potential field method. Int. J. Comput. Appl. 2015, 113, 6–10. [Google Scholar] [CrossRef][Green Version]
- Gul, F.; Mir, I.; Rahiman, W.; Islam, T.U. Novel Implementation of Multi-Robot Space Exploration Utilizing Coordinated Multi-Robot Exploration and Frequency Modified Whale Optimization Algorithm. IEEE Access 2021, 9, 22774–22787. [Google Scholar] [CrossRef]
- Gul, F.; Mir, I.; Abualigah, L.; Sumari, P. Multi-Robot Space Exploration: An Augmented Arithmetic Approach. IEEE Access 2021, 9, 107738–107750. [Google Scholar] [CrossRef]
- Cherroun, L.; Boumehraz, M.; Kouzou, A. Mobile Robot Path Planning Based on Optimized Fuzzy Logic Controllers. In New Developments and Advances in Robot Control; Springer: Berlin/Heidelberg, Germany, 2019; pp. 255–283. [Google Scholar]
- Chhotray, A.; Parhi, D.R. Navigational control analysis of two-wheeled self-balancing robot in an unknown terrain using back-propagation neural network integrated modified DAYANI approach. Robotica 2019, 37, 1346–1362. [Google Scholar] [CrossRef]
- Burchardt, H.; Salomon, R. Implementation of path planning using genetic algorithms on mobile robots. In Proceedings of the 2006 IEEE International Conference on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; pp. 1831–1836. [Google Scholar]
- Su, K.; Wang, Y.; Hu, X. Robot path planning based on random coding particle swarm optimization. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 58–64. [Google Scholar] [CrossRef]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar] [CrossRef]








| Control Panel | Sensor | Software | Testing Environment | Source |
|---|---|---|---|---|
| E-puck robot | IR, VGA camera, Bluetooth | Webots software | Urban | [37] |
| Pioneer 3-DX | camera | Xilinx, GA-IP FPGA | Laboratory based | [38] |
| Matlab(ROS system) | – | ROS (SLAM) | Willow Garage map | [39] |
| Aria P3-DX | – | Saphira software | simple environment | [40] |
| Pioneer 3-DX robot | sonar | ROS | simple environment | [41] |
| Applications | |
|---|---|
| Ground Vehicle | Agriculture applications of grass cutting, land surveying, soil sampling, precision spraying, weeding, and harvesting of crops, Harvester Robots |
| Aerial Vehicle | UAV Drones: Mapping and Surveying, Asset Inspection, Mining, Firefighting, Payload carrying, Aviation |
| Underwater Vehicle | Sea-gliders, Drifters, propeller-driven vehicles |
| Numerical Technique | Contributions | Source |
|---|---|---|
| Direct global collocation Pseudo spectral | The author proposed a guidance strategy for autonomous dynamic soaring utilizing Guass Pseudospectral OPtimization Software (GPOPS). | [126,127,128,129] |
| Variable order orthogonal collocation method | Sachs calculated energy-neutral trajectories for trajectory optimization utilizing two other optimization software, namely ’BOUNDSCO’ and ’TOMP’. The first program ’BOUNDSCO’ is based upon multiple shooting methodology, whereas ’TOMP’ is based on a parameter optimization technique for determining optimal control. | [95,130,131] |
| Graph-based Planner with Visibility Graph | Naazare et al. exhibited a graph-based path planner on a UAV to avoid collision in restricted areas. The trajectory builds a visibility graph of the environment using GPS information and finds the shortest path utilizing the A-star algorithm. The generated waypoints show the global localization. Furthermore, the trajectory planner can be used to successfully eliminate the difficulty of manually operating UAVs around restricted areas under challenging circumstances. | [46,132,133] |
| Parametric characterization | Imran Mir et al. presented the integration of dynamic soaring with morphing capabilities for a small Unmanned Aerial Vehicle (sUAV). Variable span and variable sweep are two wing morphologies. The non-linear wind gradient profile and 3D point-mass UAV equations of motion have been utilized to model flight dynamics. Parametric characterization has been accessed to check the key performance parameters for various phases of flight dynamics. The results show that the morphing UAV can perform dynamic soaring in an area where fixed-configuration UAVs might not work. | [10,134,135,136] |
| Runge–Kutta method | Thaer et al. studied the robotic arm control parameters with numerical solutions involved with the help of the Runge–Kutta method. The non-linear equations are incorporated with formulas of centrifugal effects, Coriolis, and gravitational torques. The method employed was an attempt to mitigate the error involved in the industrial robotic arm, which helps in the increased production system. The acquired results validate the effectiveness of the numerical method and help in analyzing the variations in position and velocity joints. The Runge–Kutta method output perfectly matches with true velocities. | [111] |
| Laplace equation | Azali et al. solve the path planning issue iteratively using a numerical method. The Laplace equation is used to calculate the potential function. The author came up with a block iterative method known as 4 Point-EG for resolving the trajectory planning. The experiment shows that the proposed method can generate a clear path from the start to the goal positions and validates that 4 Point-EG works better as compared to previous methods involved in trajectory formation. | [114] |
| MEMS-AHRS (Micro-electromechanical systems Attitude Heading Reference System | Nak Yong Ko et al. presented a new technique for attitude detection that accurately uses MEMS-AHRS for detecting the attitude in real-time. The authors proposed a depth measurement method whose robustness and accuracy are higher than the magnetic field and IMU sensors, which ultimately improves the efficiency of the attitude estimation. The technique involves quaternion to relate depth with attitude. The proposed method was tested using simulated data and performing different sea trials. The acquired results prove the efficiency of proposed method. | [122] |
| Method | Contribution | Environment Modeling | Nature Environment | Source |
|---|---|---|---|---|
| GSA-ACO with two fuzzy logic | Castillo et al. used type-2 fuzzy logic in two different bio-inspired techniques: (i) Gravitational Search Algorithm GSA and (ii) Ant Colony Optimization ACO. The parameters such as elapsed rate and percentage of iterations involved in each of these algorithms are fine-tuned by using a type-2 fuzzy logic controller. By which the behavior of a model can be controlled to perform a local/global search task. To check the feasibility of said controller, benchmark functions are used where fuzzy controllers minimize the error occurring in simulations. | Simulation-based | 2D ground vehicle | [202] |
| Fuzzy Controller | Lagunes et al. works on optimizing a fuzzy controller by using bio-inspired techniques. The inputs used are linear and angular velocity error and torque 1 and 2 to map the desired trajectory. For optimization purposes, the fireflies algorithm is integrated with a fuzzy system. | Simulation-based | 2D (ground vehicles) | [203] |
| SMC Controller | Yu et al. combined two controllers, Sliding Mode Controller and Fuzzy Controller, to regulate the robotic dolphin. The SMC controller checks the line of sight for the robot, and for checking the stability of the algorithm, the Lyapunov function is incorporated to check the convergence properties system. The experimental results show that the said control strategy perfectly steers the mobile robot towards the goal direction. | Simulation-based | 2D ground vehicles | [204] |
| PID and Fuzzy Logic Controller | Soliman et al. presented the comparison of the Omni wheel robot to achieve desire maneuverability. The kinematics model of the mobile robot is implemented on control algorithms, such as PID and Fuzzy Logic Controller. The author tested the proposed integration of controllers on hardware and validated the results obtained from simulations. | Simulation-based | 2D ground vehicles | [205] |
| Fuzzy Logic Controller | Li et al. presented the Fuzzy Logic Controller based on robotic path planning. The referenced location of the obstacle and the formation of the angle between target and robot position are considered input parameters for driving fuzzy control and determining the accurate movement of the mobile robot. | Simulation-based | 2D ground vehicles | [206] |
| Contribution | Hybrid Method | Source |
|---|---|---|
| Neuro-Fuzzy Method | Many researchers have worked on the obstacle avoidance for mobile robot. | [222,223,224,225,226,227,228,229] |
| Neuro-Fuzzy Inference System | Authors proposed the adaptive neuro-fuzzy inference system (ANFIS) for ground vehicle navigation and obstacle avoidance. Khepera simulator (KiKs) was used for simulation purposes. Experimental works were done to check the feasibility of the controller. | [230] |
| Multiple Adaptive Neuro-Fuzzy Inference System | The authors developed the adaptive fuzzy controller with two output parameters and four input parameters. Each adaptive fuzzy controller acts as a single Takagi-Sugeno type fuzzy inference system, where output is the velocity from the left and right wheels, and left and right obstacle distances with heading angle act as input parameters. The robustness of said controller is validated on the simulation platform. | [231] |
| Hybrid Intelligent System (HIS) | Alves and Lopes proposed the integration of ANN with FL for controlling robot navigation and mitigating the noise production in the system when collecting data from sensors. According to the authors, the integration provides calibration and tuning of parameters not present in the neuro-fuzzy system. Simulations were performed to validate the results successfully. | [232] |
| Dynamic Self-Generated Fuzzy Q-learning (DSGFQL) | The method was proposed for obstacle avoidance. The method was compared with dynamic fuzzy Q-learning (DFQL) and fuzzy Q-learning (FQL), and the Q-value clustering scheme was compared with the Genetic algorithm. The proposed method is said to produce the desired output and perform well when tested in simulations. | [233,234,235] |
| Cause | Challenges | Source |
|---|---|---|
| Sensors/camera | The readings form these sensors are not accurate nor reliable as they are integrated with noise, temperature, and system oscillations, etc. This arises uncertainty in the system output, which causes unintentional error in the output of the algorithm. | [236,237,238] |
| Noise occurrence | Plenty of research has been performed to mitigate and cater the noise occurrence in the vehicle system; however, this is still a challenge. These problems and plenty others widely disturb the implementation of any algorithm in real-time. | [240] |
| Vision-Based | The problem lies in identifying pairs of points in the same dimension. This causes ambiguity in identifying points, which results in inconsistent interpretation of any image. | [241,242] |
| ANN | This algorithm has numerous advantages, but they require a large data set of the surrounding area for the adjustment of hidden layers. The famous backpropagation algorithm has its own disadvantages, as it easily converges to the local minima problem. | [244,245] |
| Approach | Comments | Local/Global | Improvement | Off/On Line | Environment Dimension | Simulation/Experiment |
|---|---|---|---|---|---|---|
| Dijkstra | (a) Low efficiency | Global/Local | / | off | 2D | Simulation |
| (b) Robust and efficient success rate | ||||||
| A-star | (a) Low cost | Global/Local | / | off | 2D | Simulation |
| (b) Easy implementation and efficient | ||||||
| (c) Involves interruption and susceptible to slow convergence | ||||||
| PRM | (a) Precise Results and easy implementation | Global/Local | / | on | 2D/3D | Simulation/ Experiment |
| (b) Search path is may not be the optimal path | ||||||
| D-star | (a) Stable | Local | / | off | 2D | Simulation |
| (b) Proven effective in obstacle avoidance | ||||||
| D-star-Lite | (a) Fast and Robust | Local | / | off | 2D/3D | Simulation/ Experiment |
| (b) Proven effective for dynamic path planning | ||||||
| APF | (a) Simple and easy to implement | Local | Optimization path, improved stability, avoiding local minima | on/off | 2D/3D | Simulation/ Experiment |
| (b) Fall into local minima problem |
| Algorithms | Strengths | Challenges | Implementation | Time Complexity |
|---|---|---|---|---|
| Fuzzy Logic | (a) The fuzzy rules can be tuned for desirable requirement [3] | (a) Difficult to create membership functions | Real-time and simulation | |
| (b) Control logic implementation is easy [252] | ||||
| (c) Can be easily integrated with bio-inspired algorithms [3] | ||||
| Neural Network | (a) Works best in real-time | (a) Difficult to handle buried neuron layers in the network [244] | Real-time and simulation | |
| (b) Imitate human control logic easily | (b) Increase in layers increases complexity [244] | |||
| (c) Use of backpropagation results in a local minimum problem [253] | ||||
| (d) Acquiring a large data set in real-time is difficult [244] | ||||
| Genetic Algorithm | (a) Faster convergence rate and optimization capability [46] | (a) Get stuck in local minima problem when environment complexity increase [254] | Simulation | |
| (b) Combine well with other algorithms [46] | (b) Produce oscillations in system [255] | |||
| (c) Because of easy implementation integrate well with other algorithms [181] | ||||
| ABC | (a) Requires fewer control parameters [151] | (a) Slow convergence rate [256] | Simulation | |
| (b) Requires less computational time [181] | ||||
| (c) Because of easy implementation integrate well with other algorithms [181] | ||||
| Simulated Annealing | (a) Good at approximating global optimum [161] | (a) Slow convergence rate [161] | Simulation | |
| GWO | (a) Fast convergence rate [183] | (a) Implementation gets tricky when complex scenarios arise [185] | Simulation | |
| (b) Lesser variable involvement [183] (c) Easily integrated with other algorithms [184] | ||||
| Moth Flame | (a) Compared to other algorithms, it produces good solutions in complex scenarios [192] | (a) Has premature convergence rate [191] | Simulation | |
| WOA | (a) Easy implementation with fast convergence rate [194] | (a) Difficult to handle in a complex environment [141] | Simulation | |
| AntLion | (a) Produces good results in complex environment [195] | (a) Involvement of a lot of variables makes it difficult to handle when integrated with different algorithms [196] [74] | Simulation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gul, F.; Mir, I.; Abualigah, L.; Sumari, P.; Forestiero, A. A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions. Electronics 2021, 10, 2250. https://doi.org/10.3390/electronics10182250
Gul F, Mir I, Abualigah L, Sumari P, Forestiero A. A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions. Electronics. 2021; 10(18):2250. https://doi.org/10.3390/electronics10182250
Chicago/Turabian StyleGul, Faiza, Imran Mir, Laith Abualigah, Putra Sumari, and Agostino Forestiero. 2021. "A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions" Electronics 10, no. 18: 2250. https://doi.org/10.3390/electronics10182250
APA StyleGul, F., Mir, I., Abualigah, L., Sumari, P., & Forestiero, A. (2021). A Consolidated Review of Path Planning and Optimization Techniques: Technical Perspectives and Future Directions. Electronics, 10(18), 2250. https://doi.org/10.3390/electronics10182250