
Gradual Wear Diagnosis of Outer-Race Rolling Bearing Faults through Artificial Intelligence Methods and Stray Flux Signals

 ,
,  ,
,  ,
, 

Abstract
1. Introduction
2. Theoretical Basis
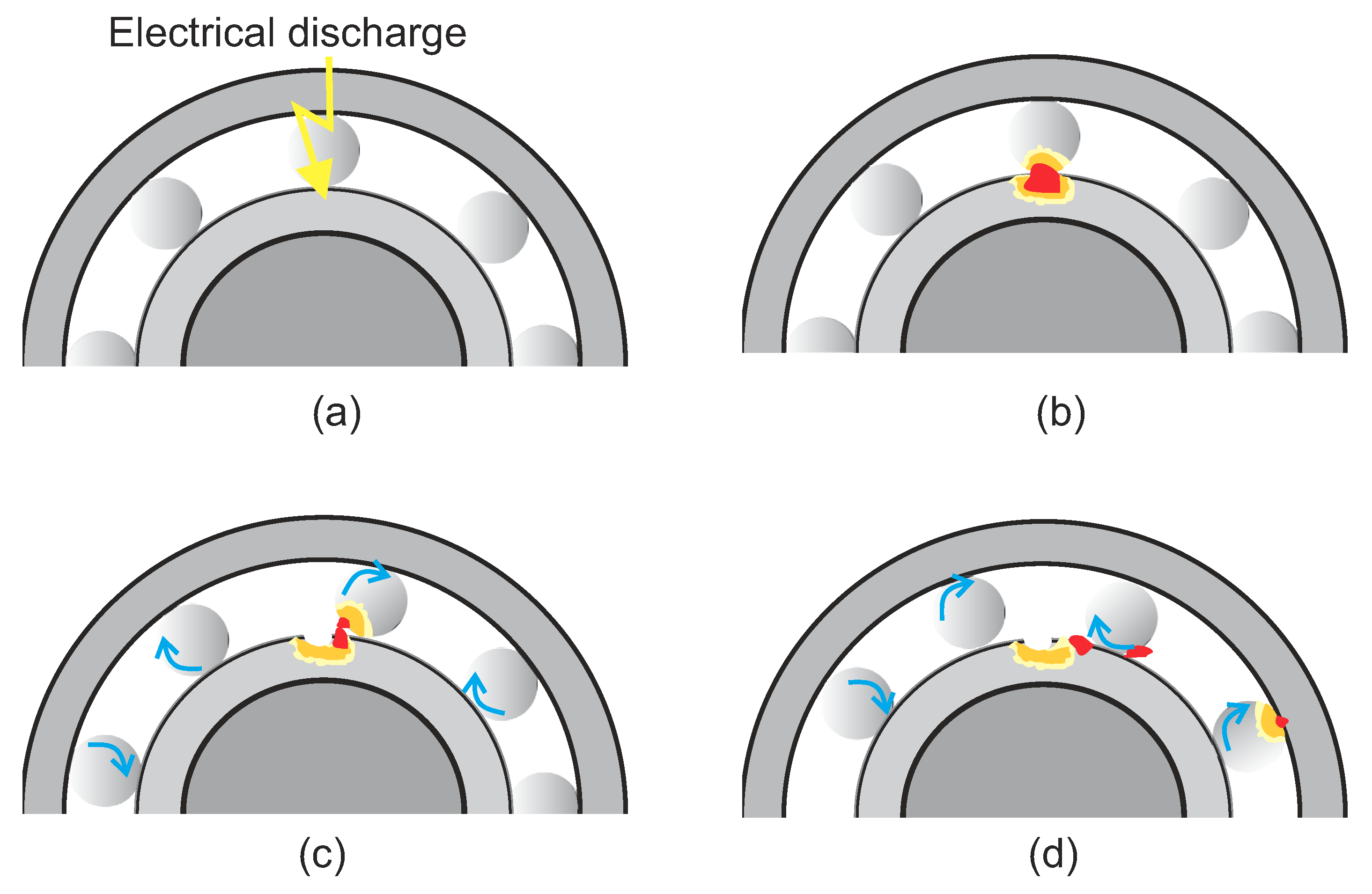
2.1. Bearing Faults Due to Electrical Arcing in Electric Motors
2.2. Rolling Bearing Faults and Its Relationship with Stray Flux Signals
2.3. Linear Discriminant Analysis
- Compute d-dimensional mean vectors of the input matrix
- Compute between-class matrix and within-class scatter matrix.
- Compute eigenvectors and eigenvalues.
- Select linear discriminants for the new feature subspace and form an eigenvector matrix.
- Use the eigenvector matrix to transform the vectors onto the new lower dimensional space.
- Maximize the between-class matrix and minimize within-class scatter matrix.
2.4. Statistical Time-Domain Features

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Equation | Feature | Equation | ||
|---|---|---|---|---|---|
| Mean | (4) | Crest factor | (5) | ||
| Root mean square | (6) | Latitude factor | (7) | ||
| Square root mean | (8) | Impulse factor | (9) | ||
| Standard deviation | (10) | Skewness | (11) | ||
| Variance | (12) | Kurtosis | (13) | ||
| RMS shape factor | (14) | Fifth central momenth | (15) | ||
| SRM shape factor | (16) | Sixth central moment | (17) |
2.5. Fractal Dimension Analysis
- Find the maximum Euclidean distance d between the first sample and sample (for ), N represents the number of samples found in the time-domain signal).
- Obtain the arithmetic sum of the Euclidean distances (L) between successive samples of time-domain signal x and then calculate its average (a) as follows:
- Compute the fractality, KFD, of the time-domain series signal according to Equation (20):
3. Proposed Methodology
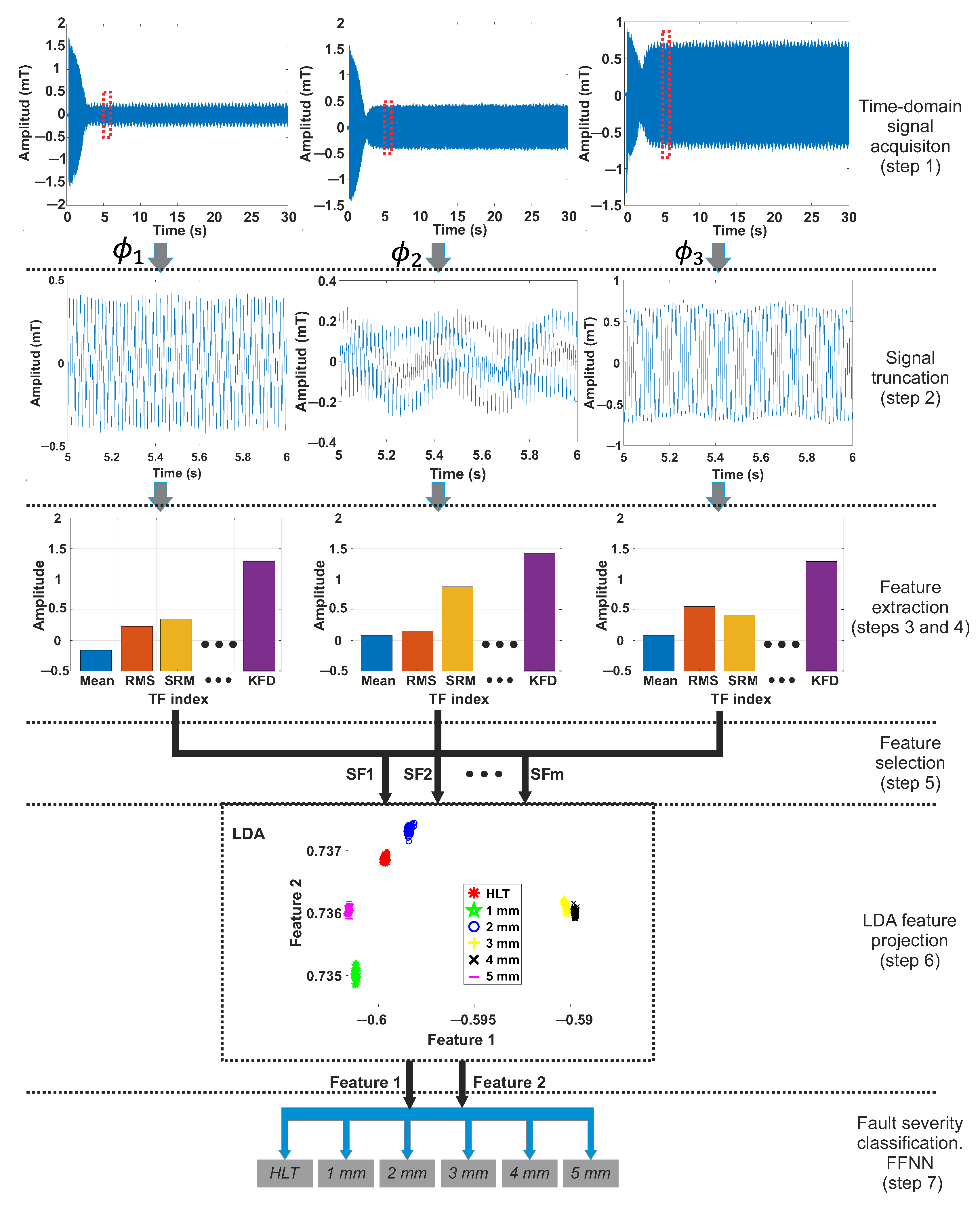
- Step 1.
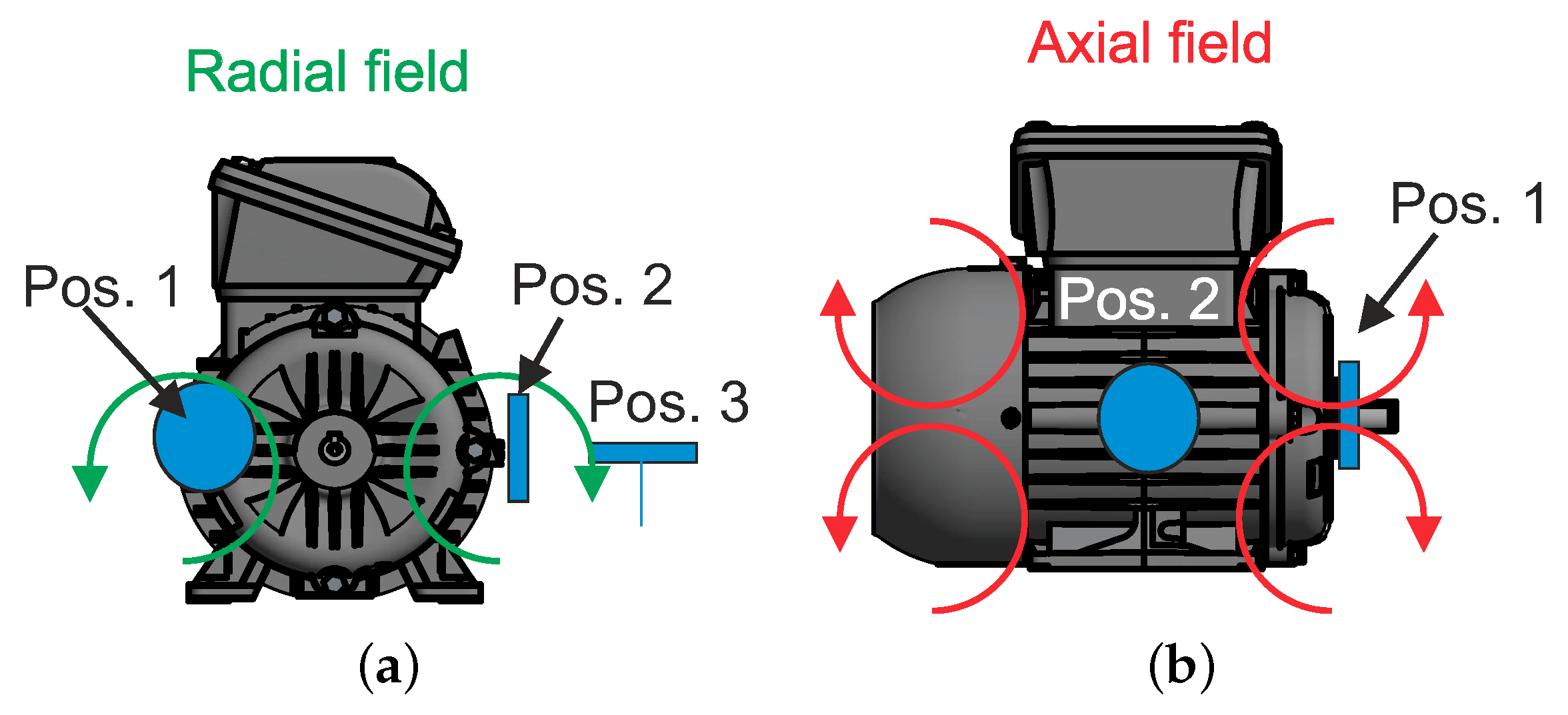
- Acquire the different time-domain stray flux signals encountered around the driving motor, namely: radial stray flux (), axial stray flux (), and axial + radial stray flux ().
- Step 2.
- Proceed to extract a truncated signal (for each stray flux acquired component) by means of a rectangular windowing centered at the steady state of the machine. A minimum size of 1 s time length is recommended in order to reduce the effect of processing noise produced by external sources.
- Step 3.
- Feature extraction. Calculate the different statistical time-features described in Section 2.4 according to the corresponding equations listed in Table 1.
- Step 4.
- Compute the Katz’s fractal dimension as described in Section 2.5 by applying Equation (20), and add it to the complete set of time-domain features.
- Step 5.
- Perform a feature selection in order to segregate the m number of most significant and discriminative TF (SF1, SF2, …, SFm). Using (3) evaluate the discriminative capabilities of all the calculated TF by carrying out combinations between all the available statistical features and retain the ones with the highest Fisher score.
- Step 6.
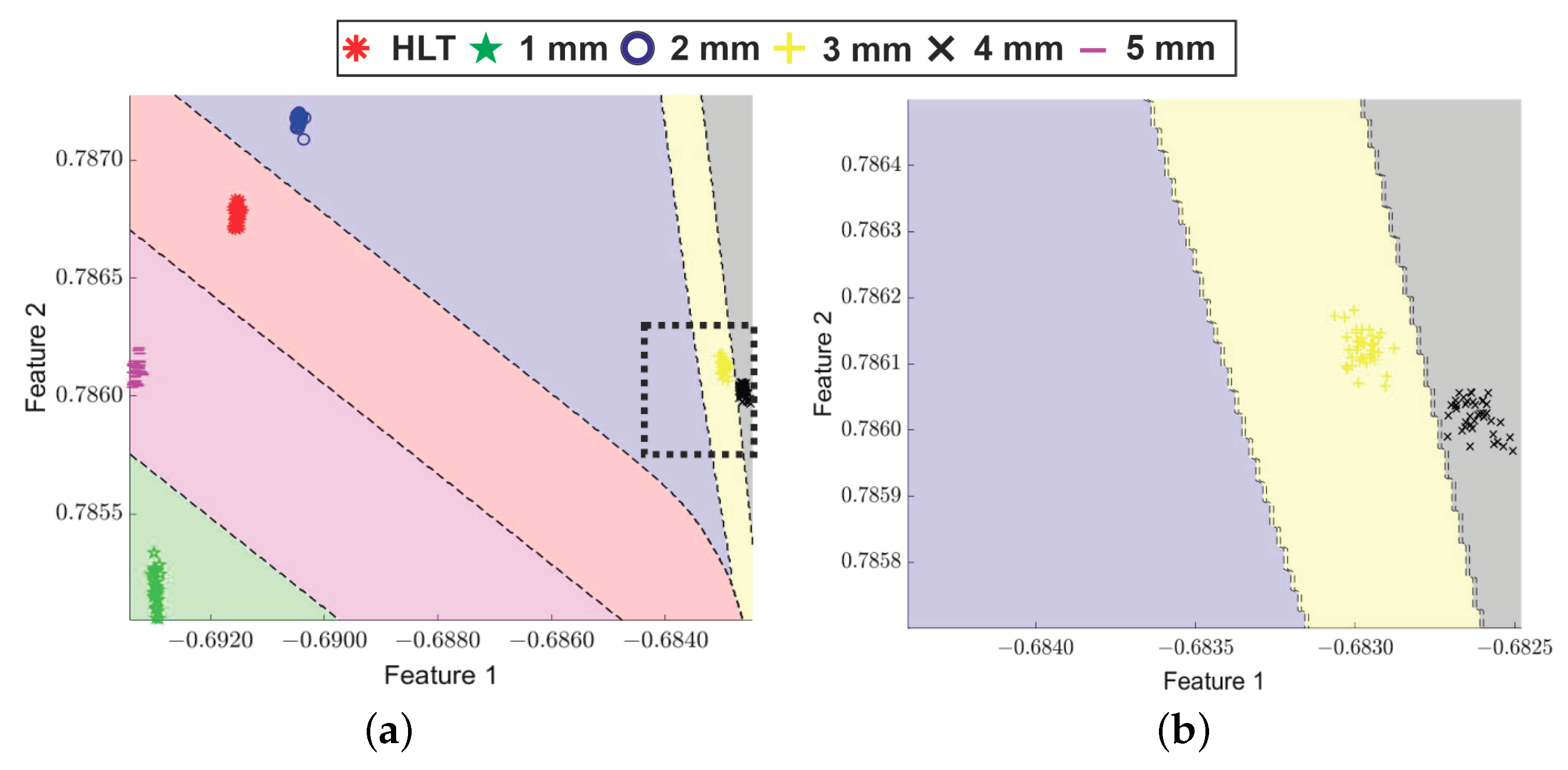
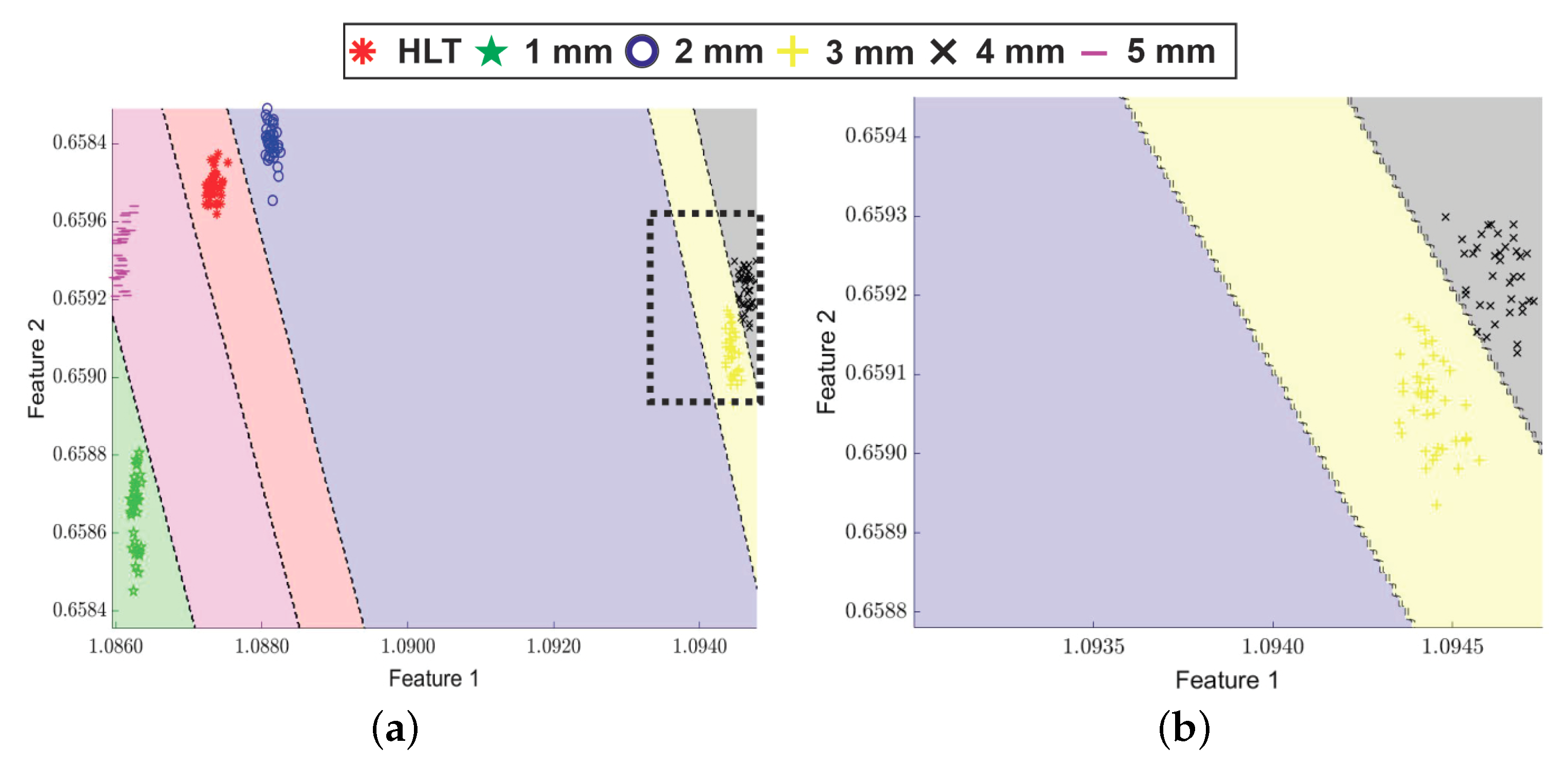
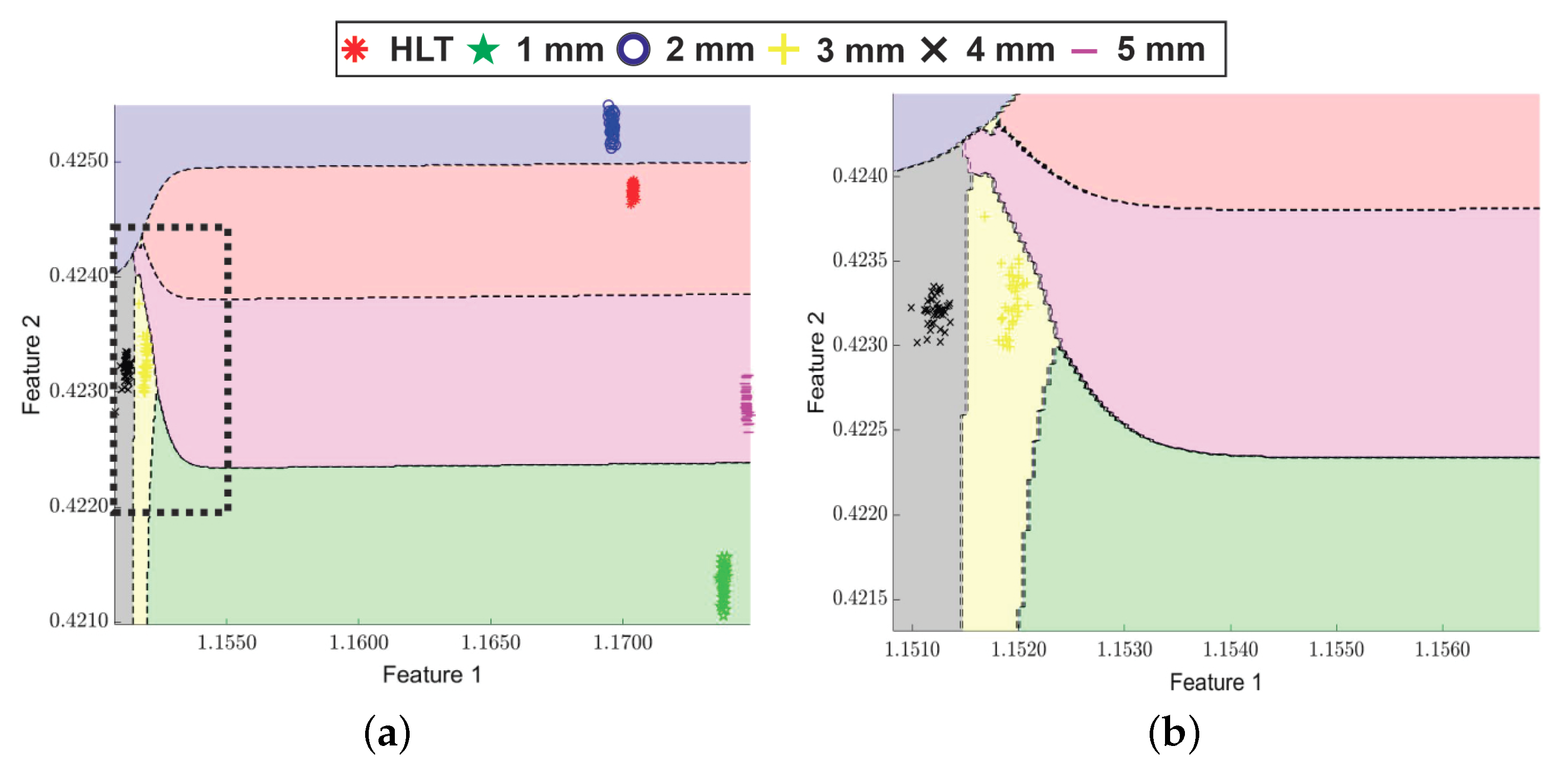
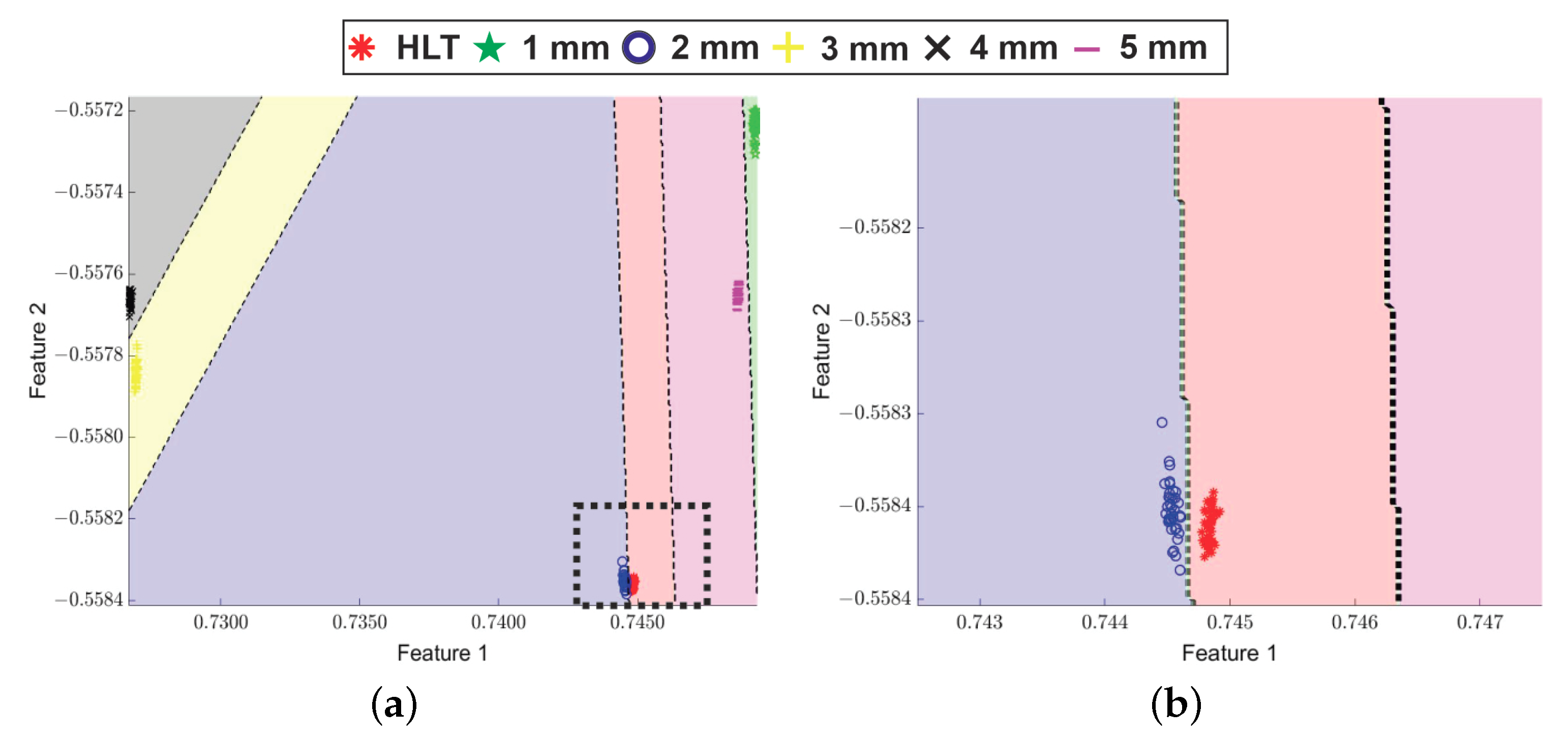
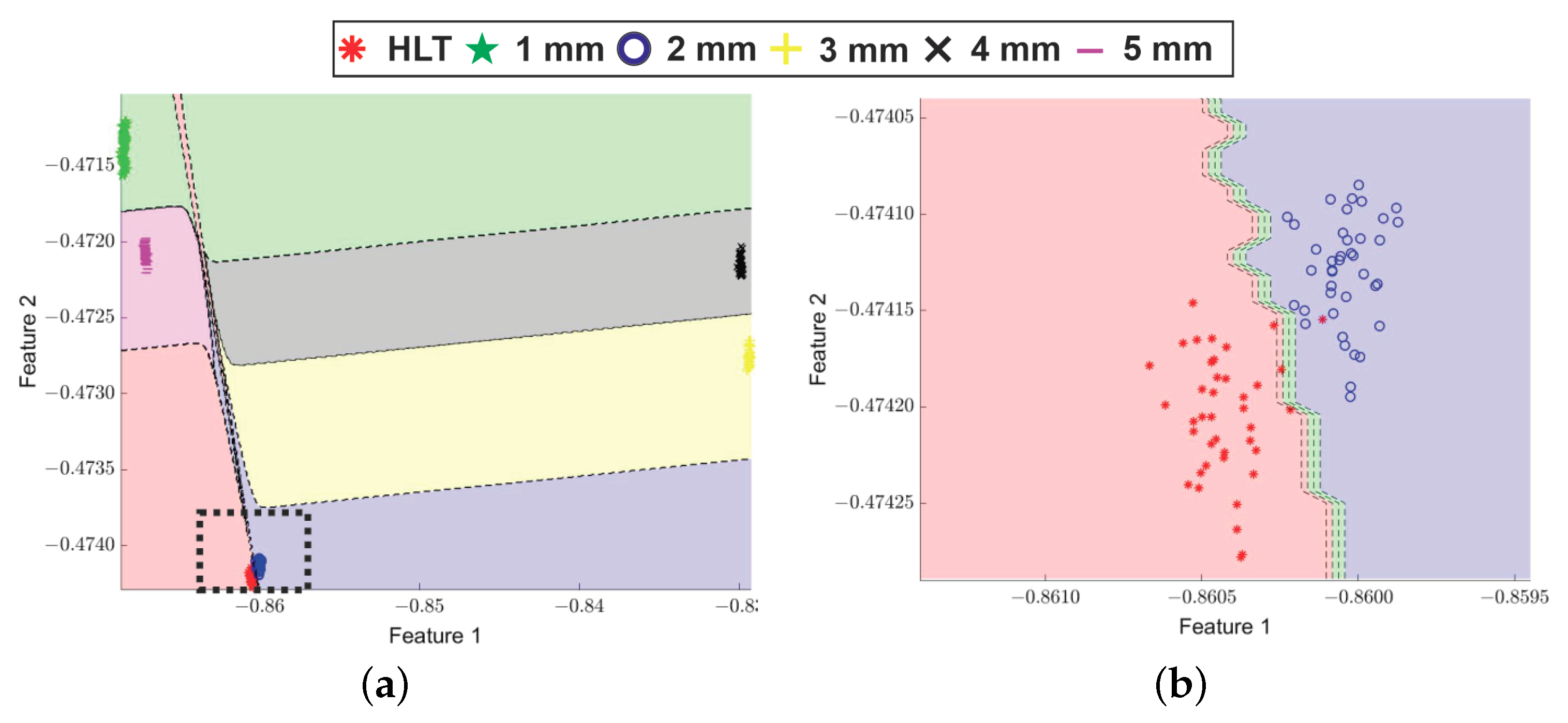
- Carry out a feature reduction by applying a LDA in order to combine relevant information yielded by the selected most discriminative features, and obtain a transformation to 2 final features (Feature 1, and Feature 2). After that, a two-dimensional projection is obtained, where the Euclidean distance among different fault severities is maximized. This projection allows to observe the data clustering between different fault severities as the main projection axis are selected to be Feature 1 and Feature 2, respectively.
- Step 7.
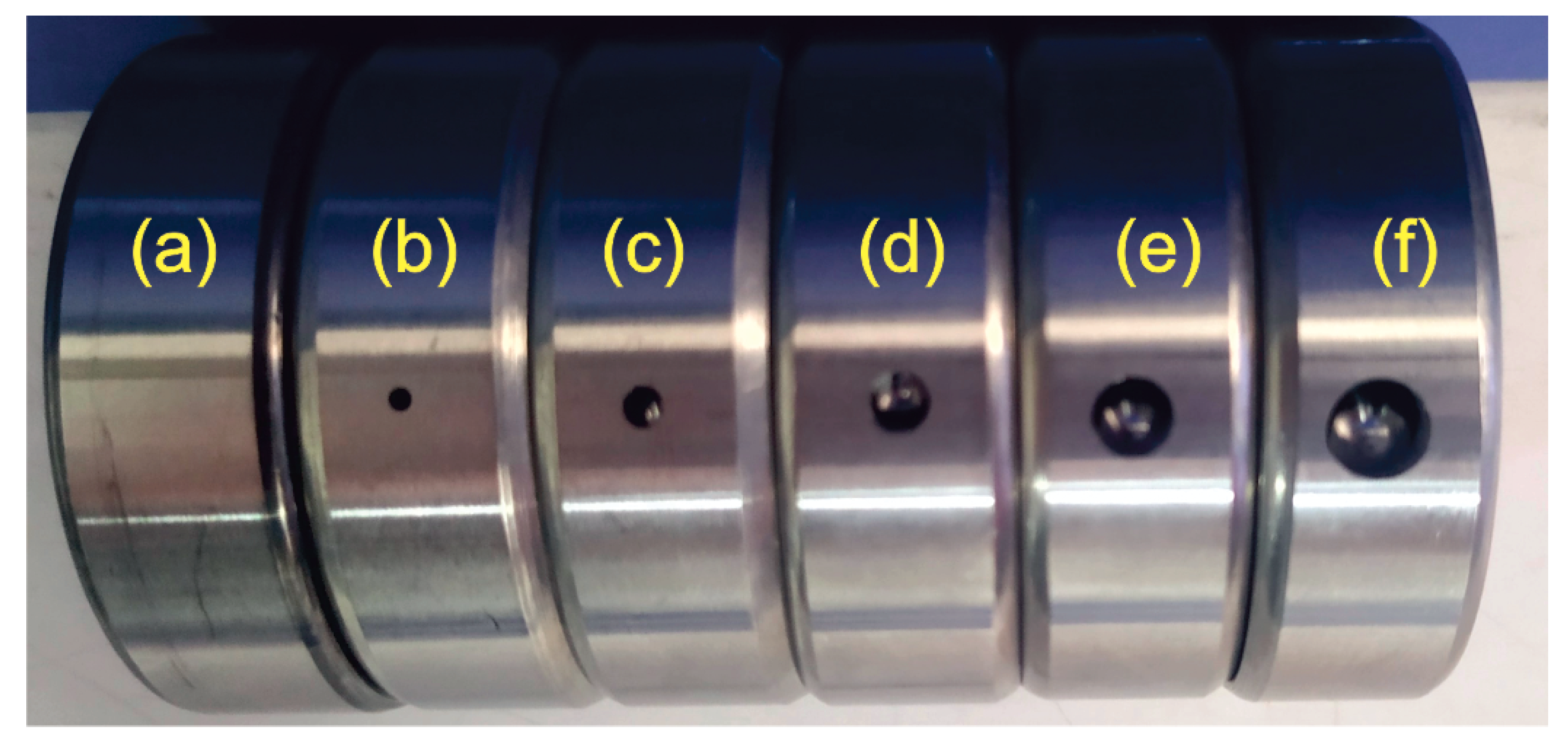
- Classify the bearing fault severity. For the objectives of this paper, it is used a FFNN with hyperbolic tangent sigmoid and linear activation functions in the hidden and output layers, respectively, which allows for an easy learning [38]. This architecture is selected due to its simplicity, high performance as an automatic classifier, and the low computation resources demanded for its computation. The features obtained after the linear discriminant analysis are feed to the FFNN, which is trained to classify among the different studied faults. In this paper, these classes correspond to healthy bearing (HLT), 1 mm, 2 mm, 3 mm, 4 mm, and 5 mm hole diameter in the outer race as fault.
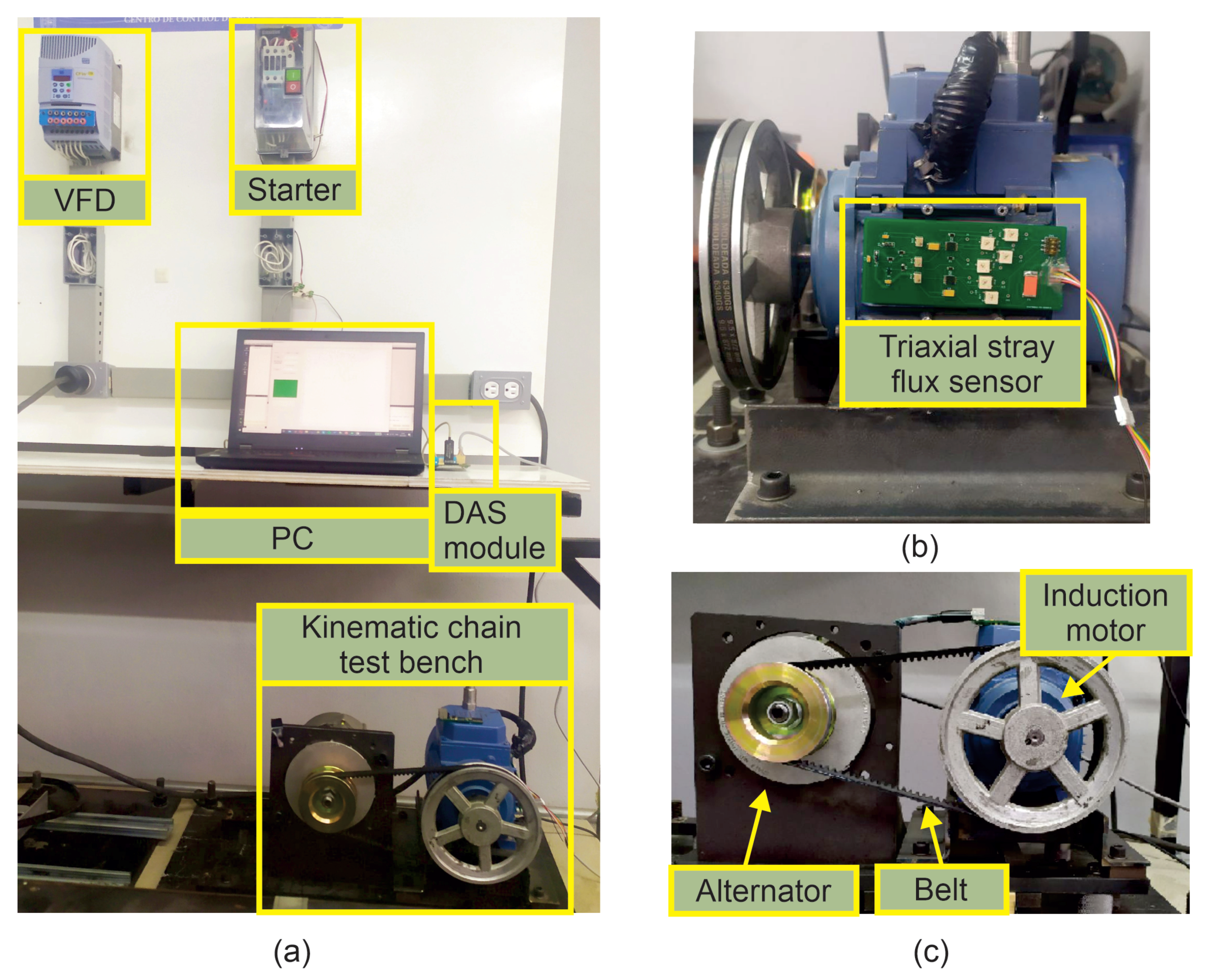
Experimental Setup
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Haraguchi, N.; Cheng, C.F.C.; Smeets, E. The importance of manufacturing in economic development: Has this changed? World Dev. 2017, 93, 293–315. [Google Scholar] [CrossRef]
- Bonnett, A.H.; Yung, C. Increased efficiency versus increased reliability. IEEE Ind. Appl. Mag. 2008, 14, 29–36. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Delgado-Prieto, M.; Ortega-Redondo, J.A.; Osornio-Rios, R.A.; Romero-Troncoso, R.D.J. Multiple-fault detection methodology based on vibration and current analysis applied to bearings in induction motors and gearboxes on the kinematic chain. Shock Vib. 2016, 2016, 5467643. [Google Scholar] [CrossRef]
- Oliver, J.A.; Guerrero, G.; Goldman, J. Ceramic bearings for electric motors: Eliminating damage with new materials. IEEE Ind. Appl. Mag. 2017, 23, 14–20. [Google Scholar] [CrossRef]
- Frosini, L. Novel Diagnostic Techniques for Rotating Electrical Machines? A Review. Energies 2020, 13, 5066. [Google Scholar] [CrossRef]
- Trajin, B.; Regnier, J.; Faucher, J. Comparison between vibration and stator current analysis for the detection of bearing faults in asynchronous drives. IET Electr. Power Appl. 2010, 4, 90–100. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep learning algorithms for bearing fault Diagnostics? A comprehensive review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Blodt, M.; Bonacci, D.; Regnier, J.; Chabert, M.; Faucher, J. On-line monitoring of mechanical faults in variable-speed induction motor drives using the Wigner distribution. IEEE Trans. Ind. Electron. 2008, 55, 522–533. [Google Scholar] [CrossRef]
- Choudhary, A.; Goyal, D.; Shimi, S.L.; Akula, A. Condition monitoring and fault diagnosis of induction motors: A review. Arch. Comput. Methods Eng. 2019, 26, 1221–1238. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic fault analysis of three commutator motors. Mech. Syst. Signal Process. 2019, 133, 106226. [Google Scholar] [CrossRef]
- Osornio-Rios, R.A.; Antonino-Daviu, J.A.; de Jesus Romero-Troncoso, R. Recent industrial applications of infrared thermography: A review. IEEE Trans. Ind. Inform. 2018, 15, 615–625. [Google Scholar] [CrossRef]
- Choudhary, A.; Goyal, D.; Letha, S.S. Infrared Thermography-Based Fault Diagnosis of Induction Motor Bearings Using Machine Learning. IEEE Sens. J. 2020, 21, 1727–1734. [Google Scholar] [CrossRef]
- Delgado-Arredondo, P.A.; Garcia-Perez, A.; Morinigo-Sotelo, D.; Osornio-Rios, R.A.; Avina-Cervantes, J.G.; Rostro-Gonzalez, H.; Romero-Troncoso, R.D.J. Comparative study of time-frequency decomposition techniques for fault detection in induction motors using vibration analysis during startup transient. Shock Vib. 2015, 2015, 708034. [Google Scholar] [CrossRef]
- Corne, B.; Vervisch, B.; Derammelaere, S.; Cruz, S.M.; Knockaert, J.; Desmet, J. Single point outer race bearing fault severity estimation using stator current measurements. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar]
- Cui, L.; Li, B.; Ma, J.; Jin, Z. Quantitative trend fault diagnosis of a rolling bearing based on Sparsogram and Lempel-Ziv. Measurement 2018, 128, 410–418. [Google Scholar] [CrossRef]
- Bediaga, I.; Mendizabal, X.; Arnaiz, A.; Munoa, J. Ball bearing damage detection using traditional signal processing algorithms. IEEE Instrum. Meas. Mag. 2013, 16, 20–25. [Google Scholar] [CrossRef]
- Chen, C.C.; Liu, Z.; Yang, G.; Wu, C.C.; Ye, Q. An Improved Fault Diagnosis Using 1D-Convolutional Neural Network Model. Electronics 2021, 10, 59. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Osornio-Rios, R.A.A.; Antonino-Daviu, J.A.; Razik, H.; de Jesus Romero-Troncoso, R. Magnetic Flux Analysis for the Condition Monitoring of Electric Machines: A Review. IEEE Trans. Ind. Inform. 2021. [Google Scholar] [CrossRef]
- Leite, V.C.; da Silva, J.G.B.; Veloso, G.F.C.; da Silva, L.E.B.; Lambert-Torres, G.; Bonaldi, E.L.; de Oliveira, L.E.D.L. Detection of localized bearing faults in induction machines by spectral kurtosis and envelope analysis of stator current. IEEE Trans. Ind. Electron. 2014, 62, 1855–1865. [Google Scholar] [CrossRef]
- Immovilli, F.; Bellini, A.; Rubini, R.; Tassoni, C. Diagnosis of bearing faults in induction machines by vibration or current signals: A critical comparison. IEEE Trans. Ind. Appl. 2010, 46, 1350–1359. [Google Scholar] [CrossRef]
- Lee, S.B.; Shin, J.; Park, Y.; Kim, H.; Kim, J. Reliable Flux based Detection of Induction Motor Rotor Faults from the 5th Rotor Rotational Frequency Sideband. IEEE Trans. Ind. Electron. 2020, 68, 7874–7883. [Google Scholar] [CrossRef]
- Vitek, O.; Janda, M.; Hajek, V.; Bauer, P. Detection of eccentricity and bearings fault using stray flux monitoring. In Proceedings of the 8th IEEE Symposium on Diagnostics for Electrical Machines, Power Electronics & Drives, Dallas, TX, USA, 22–25 August 2021; pp. 456–461. [Google Scholar]
- Frosini, L.; Harlişca, C.; Szabó, L. Induction machine bearing fault detection by means of statistical processing of the stray flux measurement. IEEE Trans. Ind. Electron. 2014, 62, 1846–1854. [Google Scholar] [CrossRef]
- Harlişca, C.; Szabó, L.; Frosini, L.; Albini, A. Diagnosis of rolling bearings faults in electric machines through stray magnetic flux monitoring. In Proceedings of the 2013 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 23–25 May 2013; pp. 1–6. [Google Scholar]
- Luo, G.; Habetler, T.G.; Hurwitz, J. Stray Flux-Based Incipient Stage Bearing Fault Detection for Induction Machines via Noise Cancellation Techniques. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 764–768. [Google Scholar]
- Wang, D.; Tsui, K.L.; Miao, Q. Prognostics and health management: A review of vibration based bearing and gear health indicators. IEEE Access 2017, 6, 665–676. [Google Scholar] [CrossRef]
- Ewert, P.; Kowalski, C.T.; Orlowska-Kowalska, T. Low-Cost Monitoring and Diagnosis System for Rolling Bearing Faults of the Induction Motor Based on Neural Network Approach. Electronics 2020, 9, 1334. [Google Scholar] [CrossRef]
- Mao, W.; Wang, L.; Feng, N. A new fault diagnosis method of bearings based on structural feature selection. Electronics 2019, 8, 1406. [Google Scholar] [CrossRef]
- Plazenet, T.; Boileau, T.; Caironi, C.; Nahid-Mobarakeh, B. A comprehensive study on shaft voltages and bearing currents in rotating machines. IEEE Trans. Ind. Appl. 2018, 54, 3749–3759. [Google Scholar] [CrossRef]
- Romary, R.; Roger, D.; Brudny, J.F. Analytical computation of an AC machine external magnetic field. Eur. Phys. J. Appl. Phys. 2009, 47, 31102. [Google Scholar] [CrossRef]
- Song, X.; Liu, Z.; Yang, X.; Yang, J.; Qi, Y. Extended semi-supervised fuzzy learning method for nonlinear outliers via pattern discovery. Appl. Soft Comput. 2015, 29, 245–255. [Google Scholar] [CrossRef]
- Wen, J.; Fang, X.; Cui, J.; Fei, L.; Yan, K.; Chen, Y.; Xu, Y. Robust sparse linear discriminant analysis. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 390–403. [Google Scholar] [CrossRef]
- Caesarendra, W.; Tjahjowidodo, T. A review of feature extraction methods in vibration-based condition monitoring and its application for degradation trend estimation of low-speed slew bearing. Machines 2017, 5, 21. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Delgado-Prieto, M.; Osornio-Rios, R.A.; Romero-Troncoso, R.D.J. Diagnosis methodology for identifying gearbox wear based on statistical time feature reduction. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 2711–2722. [Google Scholar] [CrossRef]
- Huerta-Rosales, J.R.; Granados-Lieberman, D.; Garcia-Perez, A.; Camarena-Martinez, D.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M. Short-Circuited Turn Fault Diagnosis in Transformers by Using Vibration Signals, Statistical Time Features, and Support Vector Machines on FPGA. Sensors 2021, 21, 3598. [Google Scholar] [CrossRef] [PubMed]
- Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Perez-Ramirez, C.A.; Camarena-Martinez, D.; Garcia-Perez, A.; Romero-Troncoso, R.J. Fractal dimension and fuzzy logic systems for broken rotor bar detection in induction motors at start-up and steady-state regimes. Meas. Sci. Technol. 2017, 28, 075001. [Google Scholar] [CrossRef]
- Katz, M.J. Fractals and the analysis of waveforms. Comput. Biol. Med. 1988, 18, 145–156. [Google Scholar] [CrossRef]
- Feng, J.; Lu, S. Performance analysis of various activation functions in artificial neural networks. J. Phys. Conf. Ser. 2019, 1237, 022030. [Google Scholar] [CrossRef]














| Bearing Fault Severity | Power Supply Frequency | Number of Repetitions | Total Number of Tests |
|---|---|---|---|
| Healthy bearing | 5 Hz VFD | 7 | 35 |
| 15 Hz VFD | 7 | ||
| 50 Hz VFD | 7 | ||
| 60 Hz VFD | 7 | ||
| 60 Hz direct line | 7 | ||
| 1 mm | 5 Hz VFD | 7 | 35 |
| 15 Hz VFD | 7 | ||
| 50 Hz VFD | 7 | ||
| 60 Hz VFD | 7 | ||
| 60 Hz direct line | 7 | ||
| 2 mm | 5 Hz VFD | 7 | 35 |
| 15 Hz VFD | 7 | ||
| 50 Hz VFD | 7 | ||
| 60 Hz VFD | 7 | ||
| 60 Hz direct line | 7 | ||
| 5 Hz VFD | 7 | ||
| 3 mm | 15 Hz VFD | 7 | 35 |
| 50 Hz VFD | 7 | ||
| 60 Hz VFD | 7 | ||
| 60 Hz direct line | 7 | ||
| 5 Hz VFD | 7 | ||
| 4 mm | 15 Hz VFD | 7 | 35 |
| 50 Hz VFD | 7 | ||
| 60 Hz VFD | 7 | ||
| 60 Hz direct line | 7 | ||
| 5 Hz VFD | 7 | ||
| 5 mm | 15 Hz VFD | 7 | 35 |
| 50 Hz VFD | 7 | ||
| 60 Hz VFD | 7 | ||
| 60 Hz direct line | 7 | ||
| Total tests |
| Operating Frequency | ||||||
|---|---|---|---|---|---|---|
| 60 Hz Direct Line | 60 Hz VFD | 50 Hz VFD | ||||
| Bearing Fault Severity | Selected Subset of Features | Computed Fisher Score | Selected Subset of Features | Computed Fisher Score | Selected Subset of Features | Computed Fisher Score |
| 1 mm | , k,KFD | 7.16 | RMS, SRM, | 21.63 | RMS, SRM, k | 817.19 |
| 2 mm | , , KFD | 4.34 | , , KFD | 47.60 | , , KFD | 80.42 |
| 3 mm | , M, KFD | 178.91 | RMS, KFD, | 157.68 | , , KFD | 37.14 |
| 4 mm | , KFD, SMR | 161.51 | RMS, KFD, | 104.54 | , , KFD | 77.83 |
| 5 mm | , , KFD | 4.31 | Mean, RMS, | 15.23 | , , KFD | 160.14 |
| Operating Frequency | ||||
|---|---|---|---|---|
| 15 Hz VFD | 5 Hz VFD | |||
| Bearing Fault Severity | Selected Subset of Features | Computed Fisher Score | Selected Subset of Features | Computed Fisher Score |
| 1 mm | RMS, SRM, | 90.50 | RMS, SRM, | 87.86 |
| 2 mm | , , KFD | 19.84 | , , KFD | 24.03 |
| 3 mm | RMS, SRM, | 78.66 | RMS, SRM, | 63.85 |
| 4 mm | RMS, SRM, | 62.62 | RMS, SRM, | 56.24 |
| 5 mm | SRM, , KFD | 27.58 | SRM, k, KFD | 16.95 |
| Assigned Class | True Class | Effectiveness (%) | |||||
|---|---|---|---|---|---|---|---|
| HLT | 1 mm | 2 mm | 3 mm | 4 mm | 5 mm | ||
| HLT | 40 | 0 | 0 | 0 | 0 | 0 | 100 |
| 1 mm | 0 | 40 | 0 | 0 | 0 | 0 | 100 |
| 2 mm | 0 | 0 | 40 | 0 | 0 | 0 | 100 |
| 3 mm | 0 | 0 | 0 | 40 | 0 | 0 | 100 |
| 4 mm | 0 | 0 | 0 | 0 | 40 | 0 | 100 |
| 5 mm | 0 | 0 | 0 | 0 | 0 | 40 | 100 |
| Assigned Class | True Class | Effectiveness (%) | |||||
|---|---|---|---|---|---|---|---|
| HLT | 1 mm | 2 mm | 3 mm | 4 mm | 5 mm | ||
| HLT | 39 | 0 | 0 | 0 | 0 | 0 | 97.5 |
| 1 mm | 0 | 40 | 0 | 0 | 0 | 0 | 100 |
| 2 mm | 1 | 0 | 40 | 0 | 0 | 0 | 100 |
| 3 mm | 0 | 0 | 0 | 40 | 0 | 0 | 100 |
| 4 mm | 0 | 0 | 0 | 0 | 40 | 0 | 100 |
| 5 mm | 0 | 0 | 0 | 0 | 0 | 40 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zamudio-Ramirez, I.; Osornio-Rios, R.A.; Antonino-Daviu, J.A.; Cureño-Osornio, J.; Saucedo-Dorantes, J.-J. Gradual Wear Diagnosis of Outer-Race Rolling Bearing Faults through Artificial Intelligence Methods and Stray Flux Signals. Electronics 2021, 10, 1486. https://doi.org/10.3390/electronics10121486
Zamudio-Ramirez I, Osornio-Rios RA, Antonino-Daviu JA, Cureño-Osornio J, Saucedo-Dorantes J-J. Gradual Wear Diagnosis of Outer-Race Rolling Bearing Faults through Artificial Intelligence Methods and Stray Flux Signals. Electronics. 2021; 10(12):1486. https://doi.org/10.3390/electronics10121486
Chicago/Turabian StyleZamudio-Ramirez, Israel, Roque A. Osornio-Rios, Jose A. Antonino-Daviu, Jonathan Cureño-Osornio, and Juan-Jose Saucedo-Dorantes. 2021. "Gradual Wear Diagnosis of Outer-Race Rolling Bearing Faults through Artificial Intelligence Methods and Stray Flux Signals" Electronics 10, no. 12: 1486. https://doi.org/10.3390/electronics10121486
APA StyleZamudio-Ramirez, I., Osornio-Rios, R. A., Antonino-Daviu, J. A., Cureño-Osornio, J., & Saucedo-Dorantes, J.-J. (2021). Gradual Wear Diagnosis of Outer-Race Rolling Bearing Faults through Artificial Intelligence Methods and Stray Flux Signals. Electronics, 10(12), 1486. https://doi.org/10.3390/electronics10121486