
Two-Dimensional Monte Carlo Filter for a Non-Gaussian Environment


Abstract
1. Introduction
- (1)
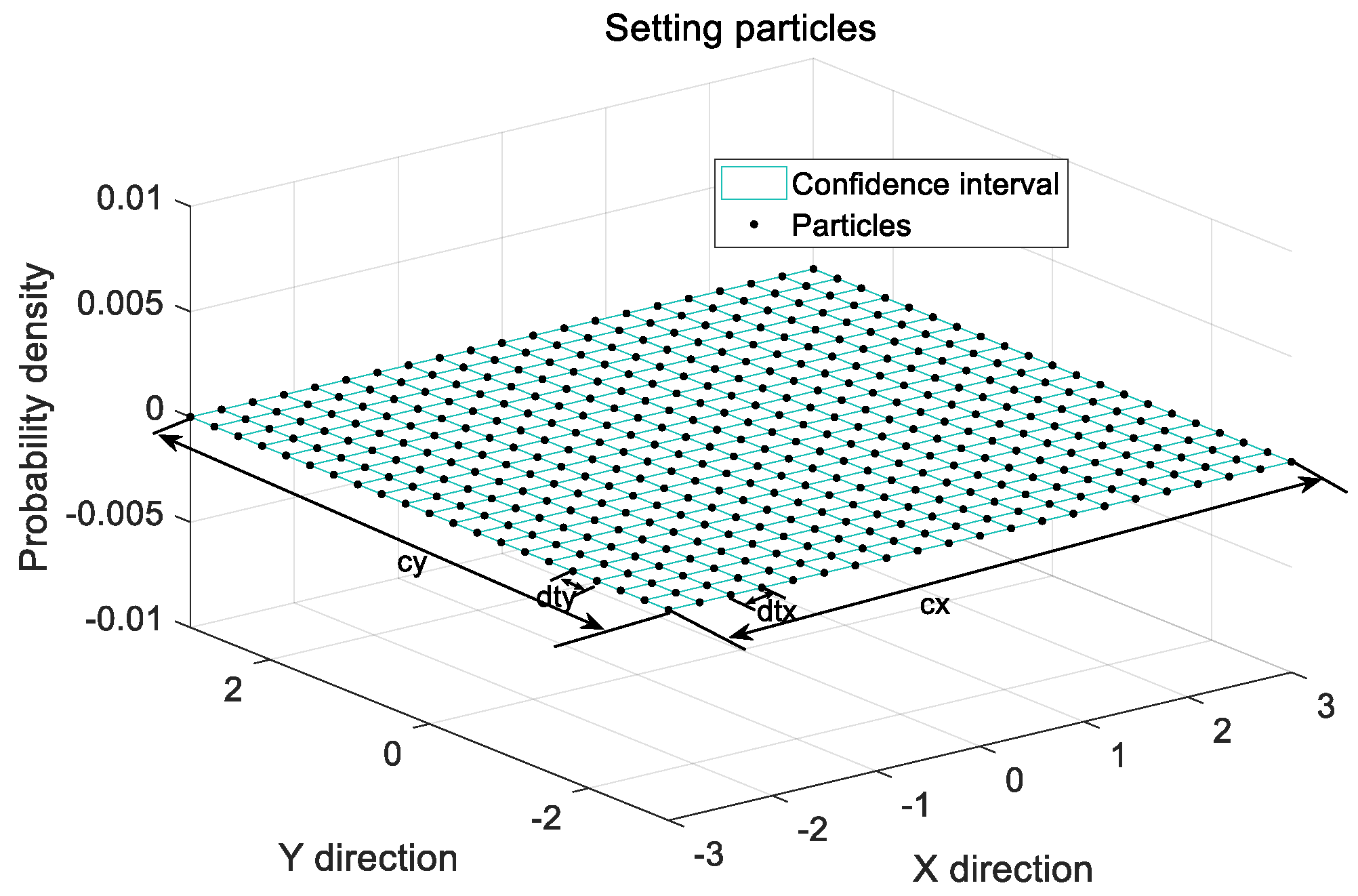
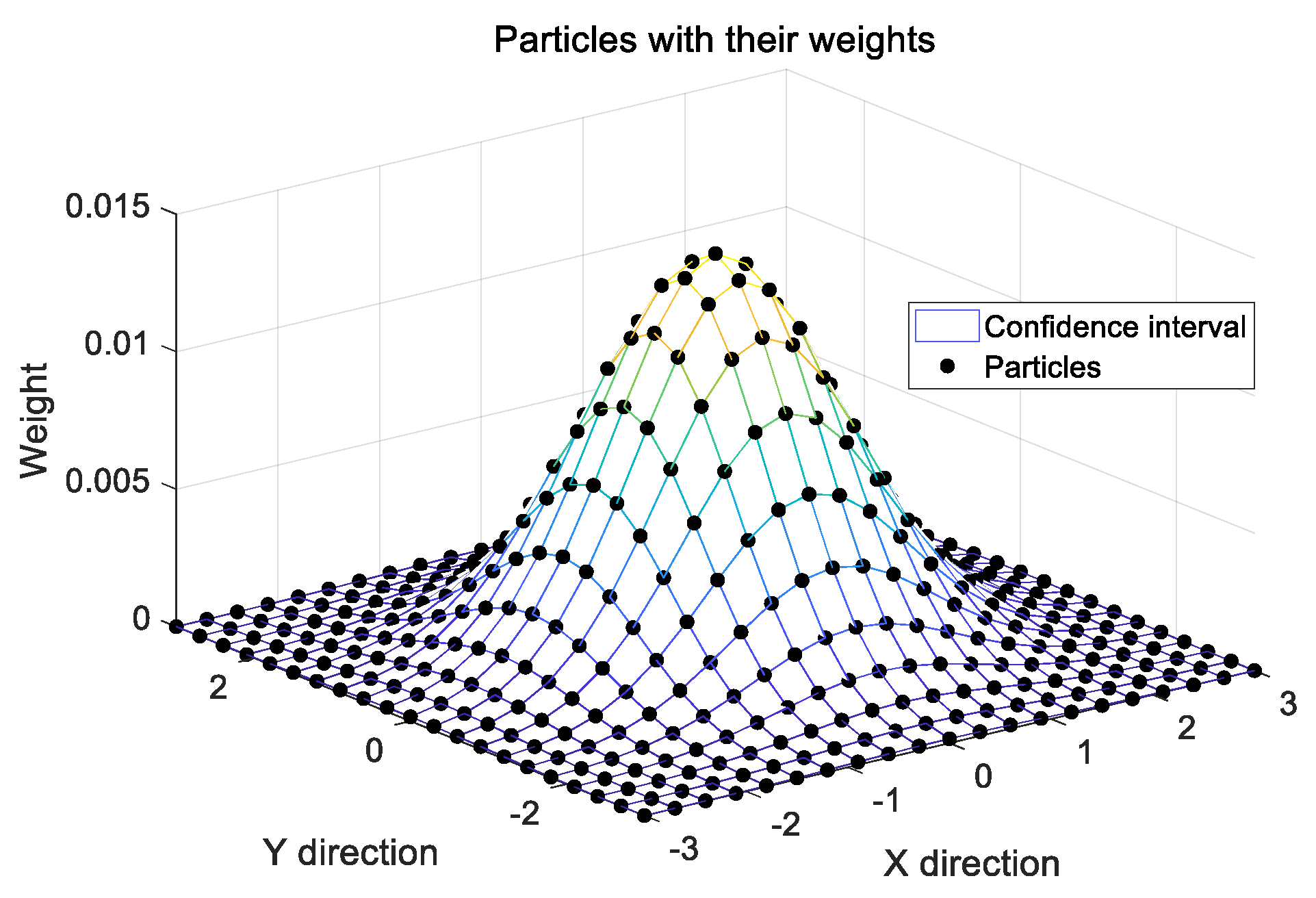
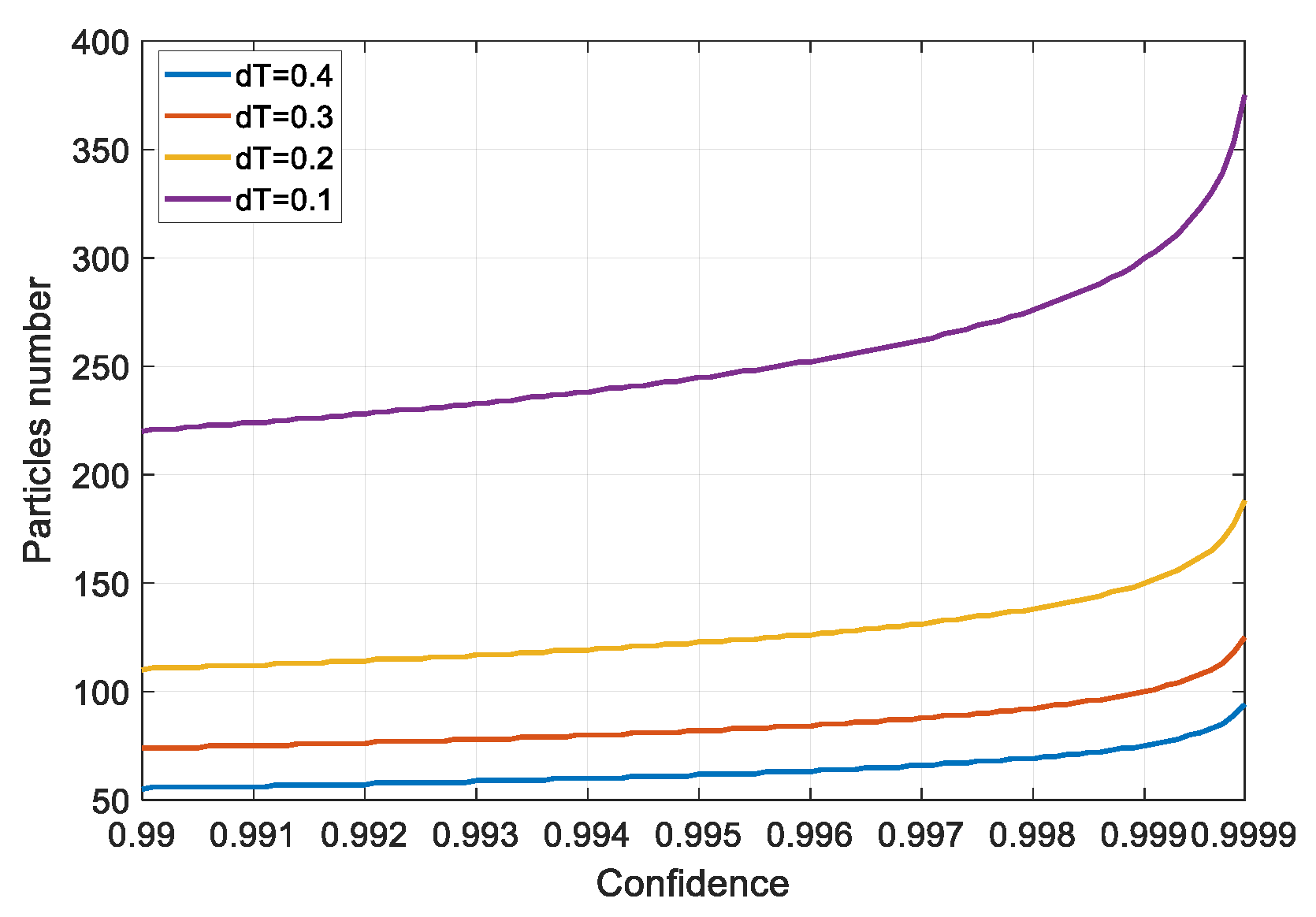
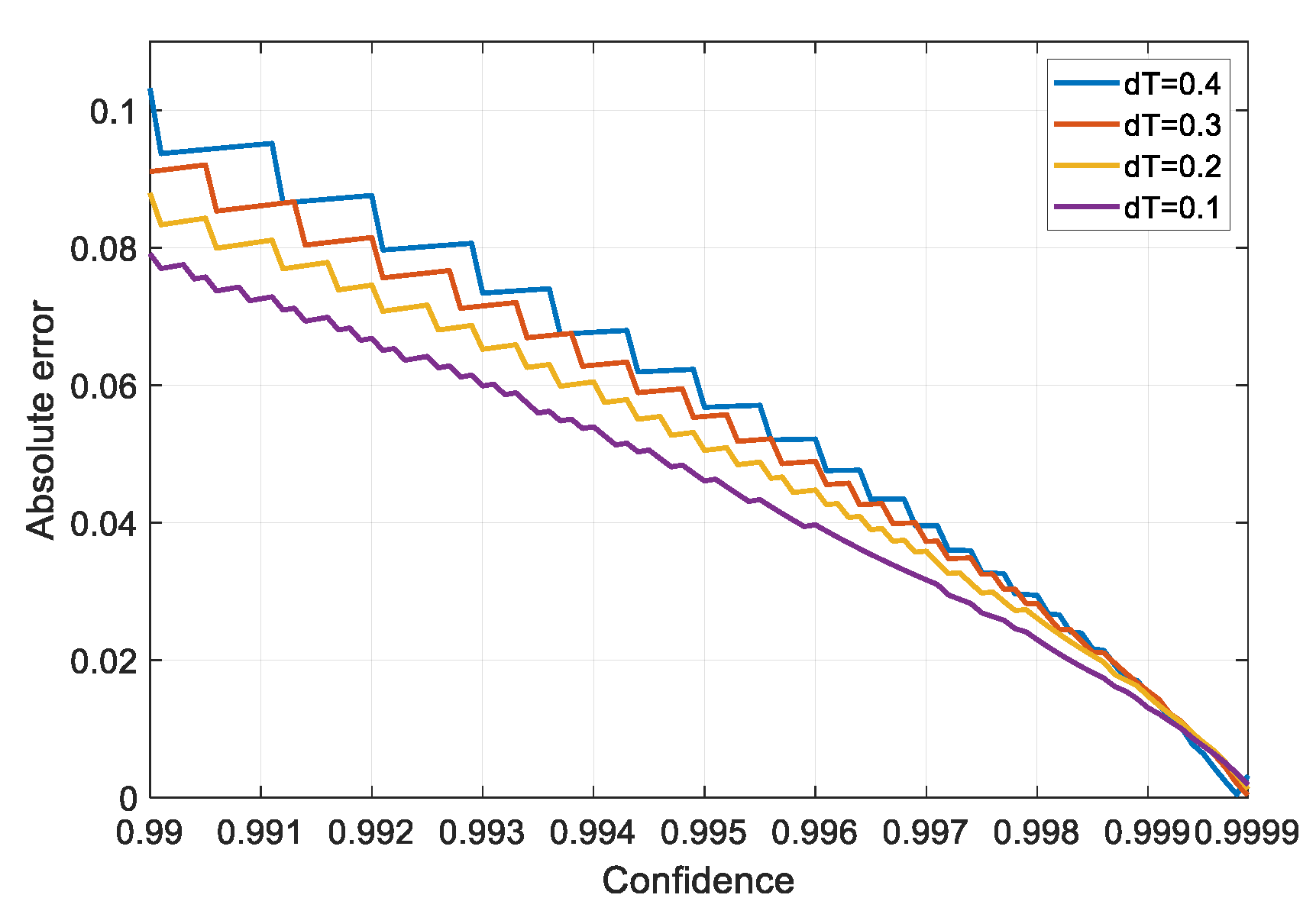
- The TMC method, as a deterministic sampling method, is proposed to improve the efficacy of particles. Particles are sampled in the confidence interval uniformly according to the sampling interval. Then, the posterior weight of each particle is calculated based on Bayesian inference. Subsequently, any probability distribution can be described by a small number of weighted particles.
- (2)
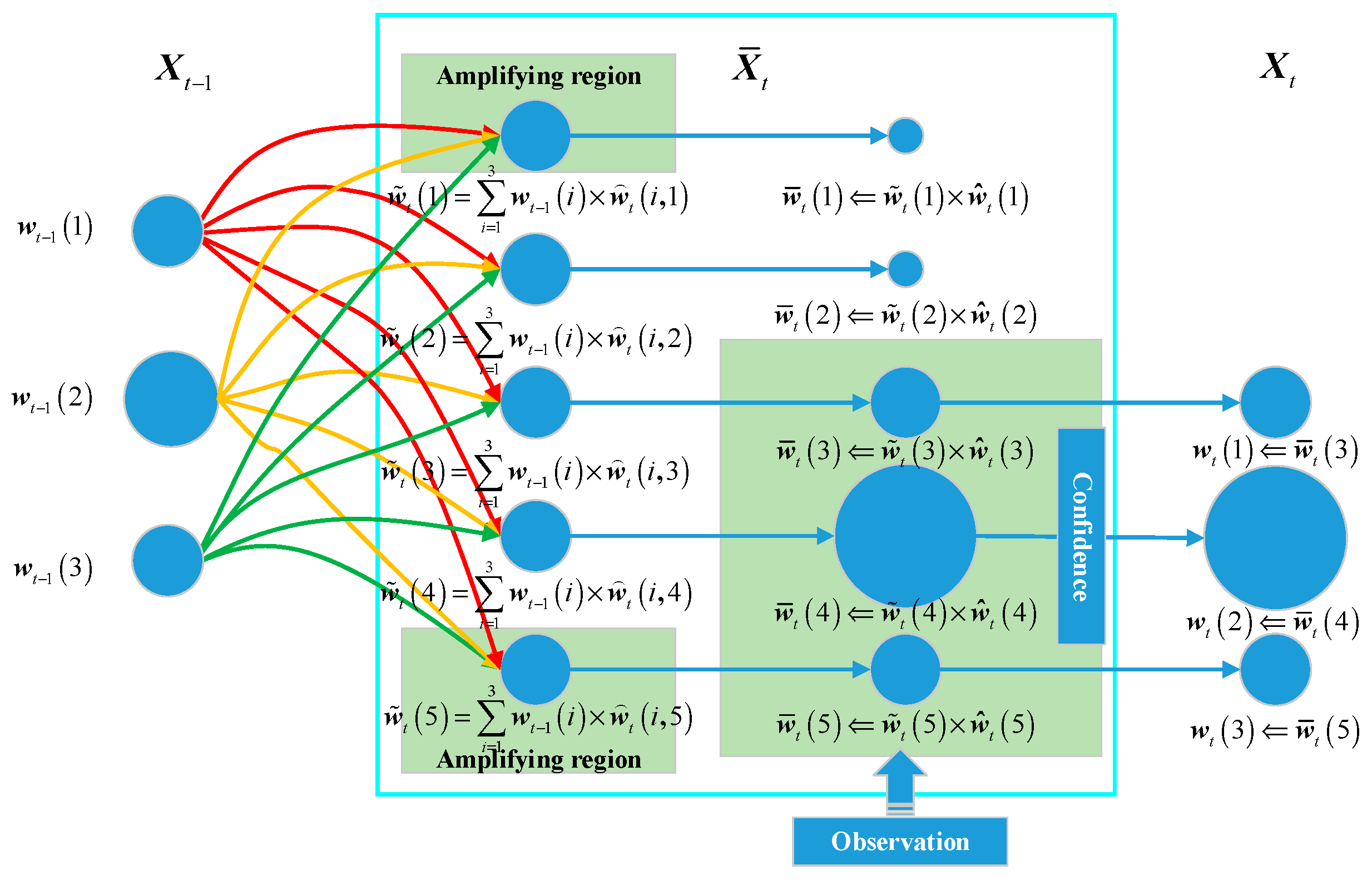
- A discrete solution to the problem of how to describe a known probability distribution transmitted in a linear or nonlinear state model is proposed. First, a small number of original weighted particles are obtained according to TMC method. Then, the confidence interval of the next time step for a fixed confidence is calculated according to the state model. Some new particles are then set in this confidence interval uniformly in terms of the sampling interval. After that, the weights of these new particles are obtained using a series of calculations based on Bayesian inference. Then, the transferred probability distribution is described by these new weighted particles.
- (3)
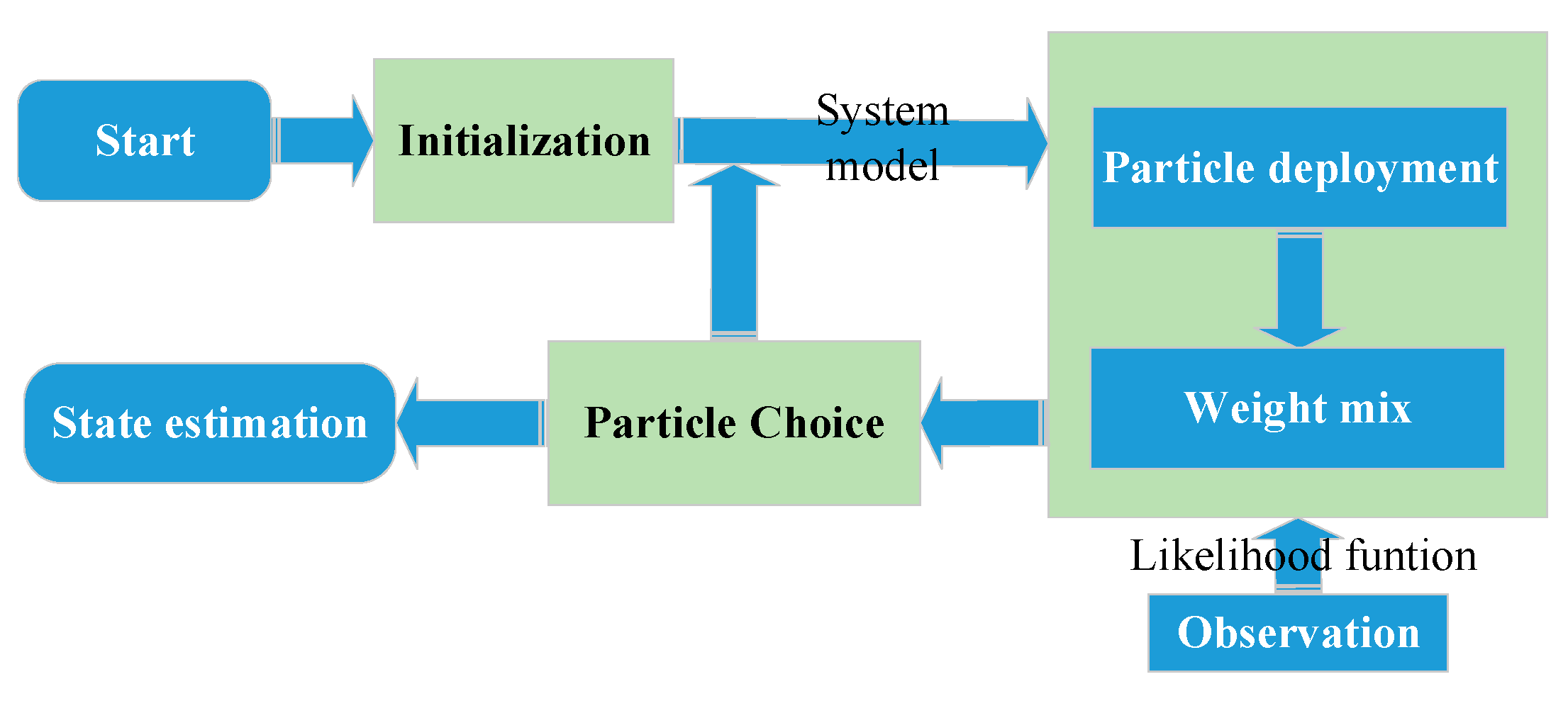
- The TMCF algorithm is proposed based on the above two points. The proposed algorithm can be divided into four parts: initialization, particle deployment, weight mixing, and state estimation. The TMC method is used in the initialization step to generate the efficacy weighted particles. Particle deployment solves the problem of state space transfer for a certain degree of confidence and deploys particles in the confidence interval. The weight mixing step achieves the fusion of several arbitrary continuous probability densities in a discrete domain. Some invalid weighted particles are omitted in the particle choice step and the state is estimated using the remaining weighted particles.
- (4)
- The performance of TMCF was verified using a numerical simulation. The results demonstrated that the proposed algorithm with the approach of fewer particles and less computation estimated accuracy better than the PF in linear and Gaussian systems and performed better than the KF and PF in linear and Gaussian mixture noise model.
2. Problem Statement and Bayesian Filter
2.1. Problem Statement
2.2. Bayesian Estimation
3. Two-Dimensional Monte Carlo Method
4. Proposed Filter Algorithm
4.1. Initialization
4.2. Particle Deployment
4.3. Weight Mix
4.4. Particle Choice and State Estimation
| Algorithm 1 | |
| 1 | Initialization: |
| 2 | Setting and |
| 3 | Generate and according to TMC method and Equation (21) |
| 4 | //Over all time steps: |
| 5 | for to do |
| 6 | Setting , or other strategy is used to select |
| 7 | Confidence interval choice according to Equation (25) or (26) |
| 8 | Particle deployment according to |
| 9 | Weight fusion according to Equations (28)–(31) |
| 10 | Particles and their weights choice according to Equations (32) and (33) |
| 11 | State estimation according to Equation (34) |
| 12 | End |
5. Numerical Simulation
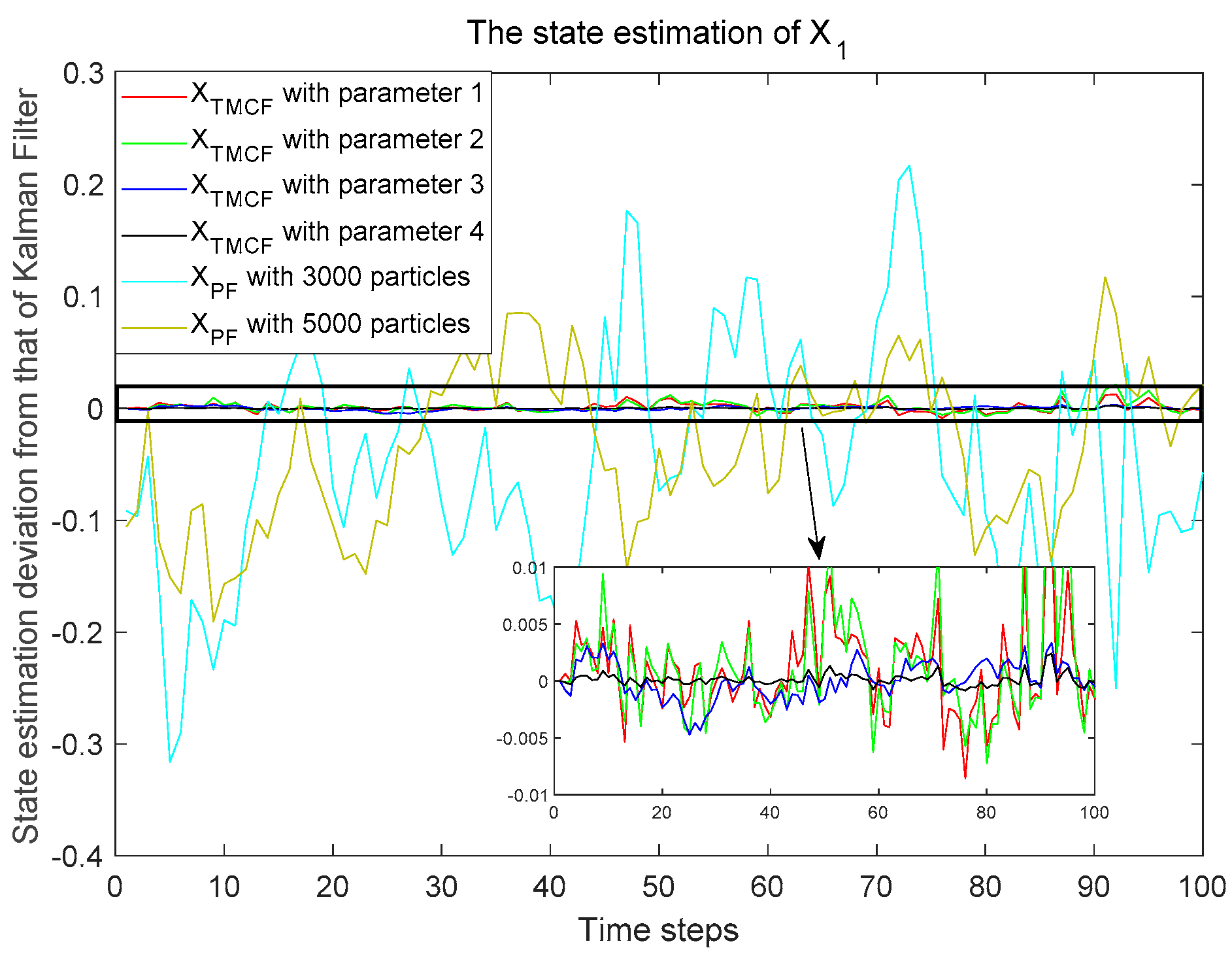
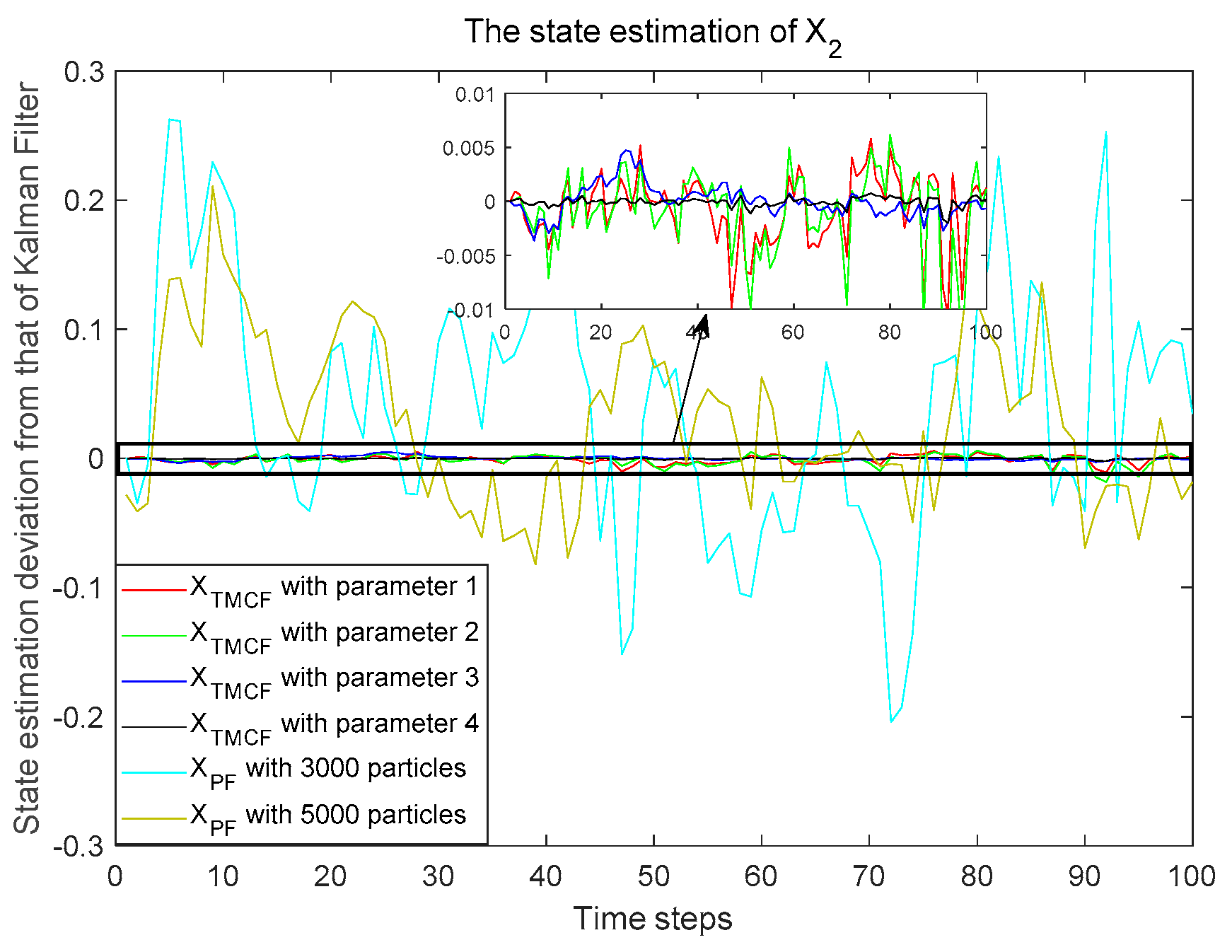
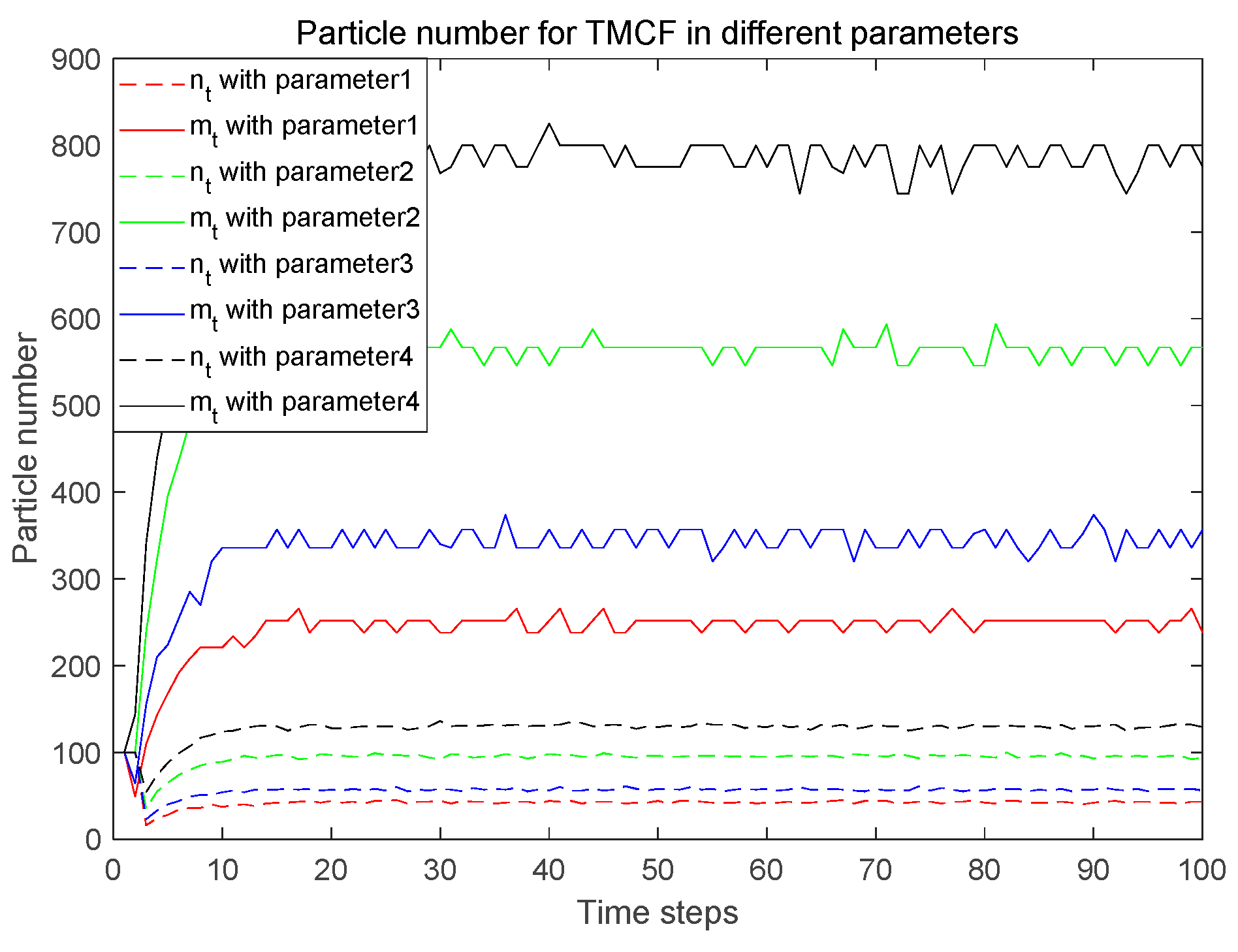
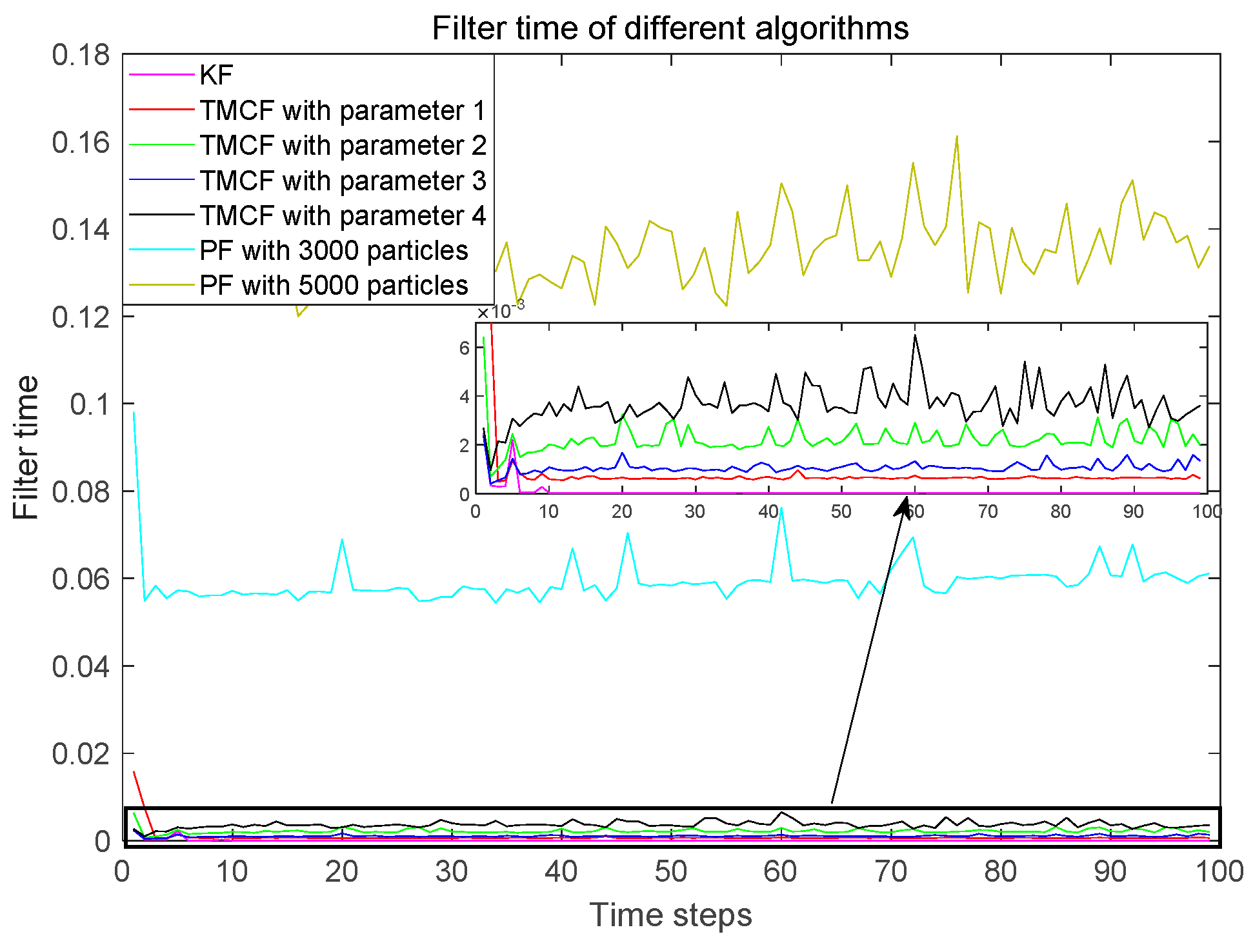
5.1. Gaussian Distribution System
5.2. Gaussian Mixture Distribution System
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhu, T.; Pimentel, M.A.F.; Clifford, G.D.; Clifton, D.A. Unsupervised Bayesian Inference to Fuse Biosignal Sensory Estimates for Personalizing Care. IEEE J. Biomed. Health Inform. 2019, 23, 47–58. [Google Scholar] [CrossRef]
- Gao, Y.; Wen, Y.; Wu, J. A Neural Network-Based Joint Prognostic Model for Data Fusion and Remaining Useful Life Prediction. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 117–127. [Google Scholar] [CrossRef] [PubMed]
- Lan, H.; Sun, S.; Wang, Z.; Pan, Q.; Zhang, Z. Joint Target Detection and Tracking in Multipath Environment: A Variational Bayesian Approach. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 2136–2156. [Google Scholar] [CrossRef]
- Nitzan, E.; Halme, T.; Koivunen, V. Bayesian Methods for Multiple Change-Point Detection with Reduced Communication. IEEE Trans. Signal Process. 2020, 68, 4871–4886. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, H. Accurate Smoothing for Continuous-Discrete Nonlinear Systems with Non-Gaussian Noise. IEEE Signal Process. Lett. 2019, 26, 465–469. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, Q.; Wang, H.; Ding, Z. RBFNN-Based Minimum Entropy Filtering for a Class of Stochastic Nonlinear Systems. IEEE Trans. Autom. Control 2020, 65, 376–381. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Li, N.; Chambers, J. Robust student’s t based nonlinear filter and smoother. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2586–2596. [Google Scholar] [CrossRef]
- Ouahabi, A. Signal and Image Multiresolution Analysis; ISTE-Wiley: London, UK, 2012. [Google Scholar]
- Gao, M.; Cai, Q.; Zheng, B.; Shi, J.; Ni, Z.; Wang, J.; Lin, H. A Hybrid YOLOv4 and Particle Filter Based Robotic Arm Grabbing System in Nonlinear and Non-Gaussian Environment. Electronics 2021, 10, 1140. [Google Scholar] [CrossRef]
- Shoushtari, H.; Willemsen, T.; Sternberg, H. Many Ways Lead to the Goal—Possibilities of Autonomous and Infrastructure-Based Indoor Positioning. Electronics 2021, 10, 397. [Google Scholar] [CrossRef]
- Adeli, H.; Ghosh-Dastidar, S.; Dadmehr, N. A Wavelet-Chaos Methodology for Analysis of EEGs and EEG Subbands to Detect Seizure and Epilepsy. IEEE Trans. Biomed. Eng. 2007, 54, 205–211. [Google Scholar] [CrossRef] [PubMed]
- Khorshidi, R.; Shabaninia, F.; Vaziri, M.; Vadhva, S. Kalman-Particle Filter Used for Particle Swarm Optimization of Economic Dispatch Problem. In Proceedings of the IEEE Global Humanitarian Technology Conference, Seattle, WA, USA, 21–24 October 2012; pp. 220–223. [Google Scholar]
- Ouahabi, A. A Review of Wavelet Denoising in Medical Imaging. In Proceedings of the International Workshop on Systems, Signal Processing and Their Applications (IEEE/WOSSPA’13), Algiers, Algeria, 12–15 May 2013; pp. 19–26. [Google Scholar]
- Sidahmed, S.; Messali, Z.; Ouahabi, A.; Trépout, S.; Messaoudi, C.; Marco, S. Nonparametric denoising methods based on contourlet transform with sharp frequency localization: Application to electron microscopy images with low exposure time. Entropy 2015, 17, 2781–2799. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J. A New Extension of the Kalman Filter to Nonlinear Systems. Proc. SPIE 1997, 3068, 182–193. [Google Scholar]
- Wan, E.A.; van der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. The Scaled Unscented Transformation. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002; pp. 4555–4559. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Jia, B.; Xin, M.; Cheng, Y. High-degree cubature Kalman filter. Automatica 2013, 49, 510–518. [Google Scholar] [CrossRef]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Automat. Control 2000, 45, 910–927. [Google Scholar] [CrossRef]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel Approach to Nonlinear/non-Gaussian Bayesian State Estimation. IEE Proc. F 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Carpenter, J.; Clifford, P.; Fearnhead, P. Improved particle filter for nonlinear problems. Proc. Inst. Elect. Eng. Radar Sonar Navig. 1999, 146, 2–7. [Google Scholar] [CrossRef]
- Chen, Z. Bayesian Filtering: From Kalman Filters to Particle Filters, and Beyond; McMaster Univ.: Hamilton, ON, USA, 2003. [Google Scholar]
- Abdzadeh-Ziabari, H.; Zhu, W.; Swamy, M.N.S. Joint Carrier Frequency Offset and Doubly Selective Channel Estimation for MIMO-OFDMA Uplink with Kalman and Particle Filtering. IEEE Trans. Signal Process. 2018, 66, 4001–4012. [Google Scholar] [CrossRef]
- Freitas, J.D.; Niranjan, M.; Gee, A.H.; Doucet, A. Sequential Monte Carlo Methods to Train Neural Network Models. Neural Comput. 2000, 12, 955–993. [Google Scholar] [CrossRef]
- Van Der Merwe, R.; Doucet, A.; De Freitas, N.; Wan, E.A. The Unscented Particle Filter. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2001; pp. 584–590. [Google Scholar]
- Zhang, C.; Taghvaei, A.; Mehta, P.G. Feedback Particle Filter on Riemannian Manifolds and Matrix Lie Groups. IEEE Trans. Autom. Control 2017, 63, 2465–2480. [Google Scholar] [CrossRef]
- Li, T.; Bolic, M.; Djuric, P.M. Resampling Methods for Particle Filtering: Classification, implementation, and strategies. IEEE Signal Process. Mag. 2015, 32, 70–86. [Google Scholar] [CrossRef]
- Liu, S.; Tang, L.; Bai, Y.; Zhang, X. A Sparse Bayesian Learning-Based DOA Estimation Method With the Kalman Filter in MIMO Radar. Electronics 2020, 9, 347. [Google Scholar] [CrossRef]
- Kitagawa, G. Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. J. Comput. Graph. Statist. 1996, 5, 1–25. [Google Scholar]
- Bergman, N.; Doucet, A.; Gordon, N. Optimal estimation and Cramer-Rao bounds for partial non-Gaussian state space models. Ann. Inst. Statist. Math. 2001, 53, 97–112. [Google Scholar] [CrossRef]
- Kulikov, G.Y.; Kulikova, M.V. The Accurate Continuous-Discrete Extended Kalman Filter for Radar Tracking. IEEE Trans. Signal Process. 2016, 64, 948–958. [Google Scholar] [CrossRef]
- Wang, J.; Wang, J.; Zhang, D.; Shao, X. Stochastic Feedback Based Kalman Filter for Nonlinear Continuous-Discrete Systems. IEEE Trans. Autom. Control 2018, 63, 3002–3009. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman Filtering for Continuous-Discrete Systems: Theory and Simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Gultekin, S.; Paisley, J. Nonlinear Kalman Filtering with Divergence Minimization. IEEE Trans. Signal Process. 2017, 65, 6319–6331. [Google Scholar] [CrossRef]
- Fasano, A.; Germani, A.; Monteriù, A. Reduced-Order Quadratic Kalman-Like Filtering of Non-Gaussian Systems. IEEE Trans. Autom. Control 2013, 58, 1744–1757. [Google Scholar] [CrossRef]
- Vo, B.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Tulsyan, A.; Huang, B.; Gopaluni, R.B.; Forbes, J.F. A Particle Filter Approach to Approximate Posterior Cramer-Rao Lower Bound: The Case of Hidden States. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2478–2495. [Google Scholar] [CrossRef]
- Li, K.; Pfaff, F.; Hanebeck, U.D. Unscented Dual Quaternion Particle Filter for SE(3) Estimation. IEEE Control Syst. Lett. 2021, 5, 647–652. [Google Scholar] [CrossRef]
- Ahwiadi, M.; Wang, W. An Enhanced Mutated Particle Filter Technique for System State Estimation and Battery Life Prediction. IEEE Trans. Instrum. Meas. 2019, 68, 923–935. [Google Scholar] [CrossRef]
- Haque, M.S.; Choi, S.; Baek, J. Auxiliary Particle Filtering-Based Estimation of Remaining Useful Life of IGBT. IEEE Trans. Ind. Electron. 2018, 65, 2693–2703. [Google Scholar] [CrossRef]
- Li, Y.; Coates, M. Particle Filtering with Invertible Particle Flow. IEEE Trans. Signal Process. 2017, 65, 4102–4116. [Google Scholar] [CrossRef]
- Yang, T.; Mehta, P.G.; Meyn, S.P. Feedback Particle Filter. IEEE Trans. Autom. Control 2013, 58, 2465–2480. [Google Scholar] [CrossRef]
- Vitetta, G.M.; Viesti, P.D.; Sirignano, E.; Montorsi, F. Multiple Bayesian Filtering as Message Passing. IEEE Trans. Signal Process. 2020, 68, 1002–1020. [Google Scholar] [CrossRef]
- Lin, Y.; Miao, L.; Zhou, Z. An Improved MCMC-Based Particle Filter for GPS-Aided SINS In-Motion Initial Alignment. IEEE Trans. Instrum. Meas. 2020, 69, 7895–7905. [Google Scholar] [CrossRef]
- Lim, J.; Hong, D. Gaussian Particle Filtering Approach for Carrier Frequency Offset Estimation in OFDM Systems. IEEE Signal Process. Lett. 2013, 20, 367–370. [Google Scholar] [CrossRef]
- Andrieu, C.; de Freitas, N.; Doucet, A. Rao-Blackwellised particle filtering via data augmentation. Adv. Neural Inform. Process. Syst. 2002, 14, 561–567. [Google Scholar]
- Kouritzin, A.M. Residual and stratified branching particle filters. Comp. Stat. Data Anal. 2017, 111, 145–165. [Google Scholar] [CrossRef]
- Qiang, X.; Zhu, Y.; Xue, R. SVRPF: An Improved Particle Filter for a Nonlinear/Non-Gaussian Environment. IEEE Access 2019, 7, 151638–151651. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ||
|---|---|---|
| 1 | 1.2 | 0.999 |
| 2 | 0.8 | 0.999 |
| 3 | 1.2 | 0.9999 |
| 4 | 0.8 | 0.9999 |
| CPU | Basic Frequency (GHz) | RAM (GB) | Windows Version | MATLAB Version |
|---|---|---|---|---|
| Intel(R) Core i5 | 1.70 | 16.0 | Windows 10 | R2018a |
| Algorithm | Parameters | Computation Time (s) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| MSE1 | MSE2 | MSE1 | MSE2 | ||||||
| KF | - | - | - | 3.421829 | 0 | 2.798550 | 0 | 3.069 × 10−5 | |
| PF | - | - | 3000 | 3.456089 | 0.027105 | 2.822853 | 0.021010 | 0.0608210 | |
| - | - | 5000 | 3.430909 | 0.015142 | 2.807029 | 0.012138 | 0.1387177 | ||
| TMCF | 1.2 | 0.999 | 42 | 248 | 3.423760 | 4.306 × 10−4 | 2.799829 | 3.155 × 10−4 | 6.282 × 10−5 |
| 0.8 | 0.999 | 95 | 560 | 3.422683 | 4.238 × 10−4 | 2.798926 | 3.081 × 10−4 | 2.101 × 10−3 | |
| 1.2 | 0.9999 | 57 | 343 | 3.421978 | 9.444 × 10−6 | 2.798610 | 7.098 × 10−6 | 9.293 × 10−4 | |
| 0.8 | 0.9999 | 130 | 782 | 3.421878 | 8.874 × 10−6 | 2.798539 | 6.484 × 10−6 | 3.511 × 10−3 | |
| Parameters | MSE1 | Computation Time (s) | |||||
|---|---|---|---|---|---|---|---|
| KF | - | - | - | 7.619301525 | 6.3982152 | 2.224 × 10−5 | |
| PF | - | - | 3000 | 7.718597333 | 6.4887486 | 0.098728173 | |
| - | - | 5000 | 7.589158022 | 6.3695680 | 0.204914013 | ||
| TMCF | 1.2 | 0.999 | 110 | 650 | 7.581596248 | 6.3654145 | 0.006746154 |
| 0.8 | 0.999 | 250 | 1479 | 7.582551190 | 6.3659966 | 0.028529454 | |
| 1.2 | 0.9999 | 157 | 961 | 7.577101831 | 6.3616057 | 0.012136754 | |
| 0.8 | 0.9999 | 358 | 2184 | 7.576998566 | 6.3615759 | 0.067335938 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiang, X.; Xue, R.; Zhu, Y. Two-Dimensional Monte Carlo Filter for a Non-Gaussian Environment. Electronics 2021, 10, 1385. https://doi.org/10.3390/electronics10121385
Qiang X, Xue R, Zhu Y. Two-Dimensional Monte Carlo Filter for a Non-Gaussian Environment. Electronics. 2021; 10(12):1385. https://doi.org/10.3390/electronics10121385
Chicago/Turabian StyleQiang, Xingzi, Rui Xue, and Yanbo Zhu. 2021. "Two-Dimensional Monte Carlo Filter for a Non-Gaussian Environment" Electronics 10, no. 12: 1385. https://doi.org/10.3390/electronics10121385
APA StyleQiang, X., Xue, R., & Zhu, Y. (2021). Two-Dimensional Monte Carlo Filter for a Non-Gaussian Environment. Electronics, 10(12), 1385. https://doi.org/10.3390/electronics10121385