
Precise Reactive Power-Voltage Droop Control of Parallel Virtual Synchronous Generators That Considers Line Impedance



 ,
,
Abstract
1. Introduction
2. Limitation Analysis of Traditional VSG Control
2.1. Traditional VSG Control
2.2. Limitations of VSG Control Power Distribution
3. Integrated Control Strategy
3.1. Improved VSG Reactive Voltage Control
3.2. Virtual Negative Impedance Control
4. Analysis and Theoretical Verification of the Integrated Control Strategy Based on Relative Gain
4.1. Analysis of the Integrated Control Strategy Based on Relative Gain
4.2. Small-Signal Model of a Two-Machine Parallel System
- (1)
- When the virtual negative impedance control is adopted, the equivalent output impedance of the system is approximately purely inductive, realizing the decoupling of active and reactive power.
- (2)
- The output phase angle difference of the two VSGs is extremely small and approximately regarded as δ1 − δ2 = 0.
5. Simulation and Experimental Results
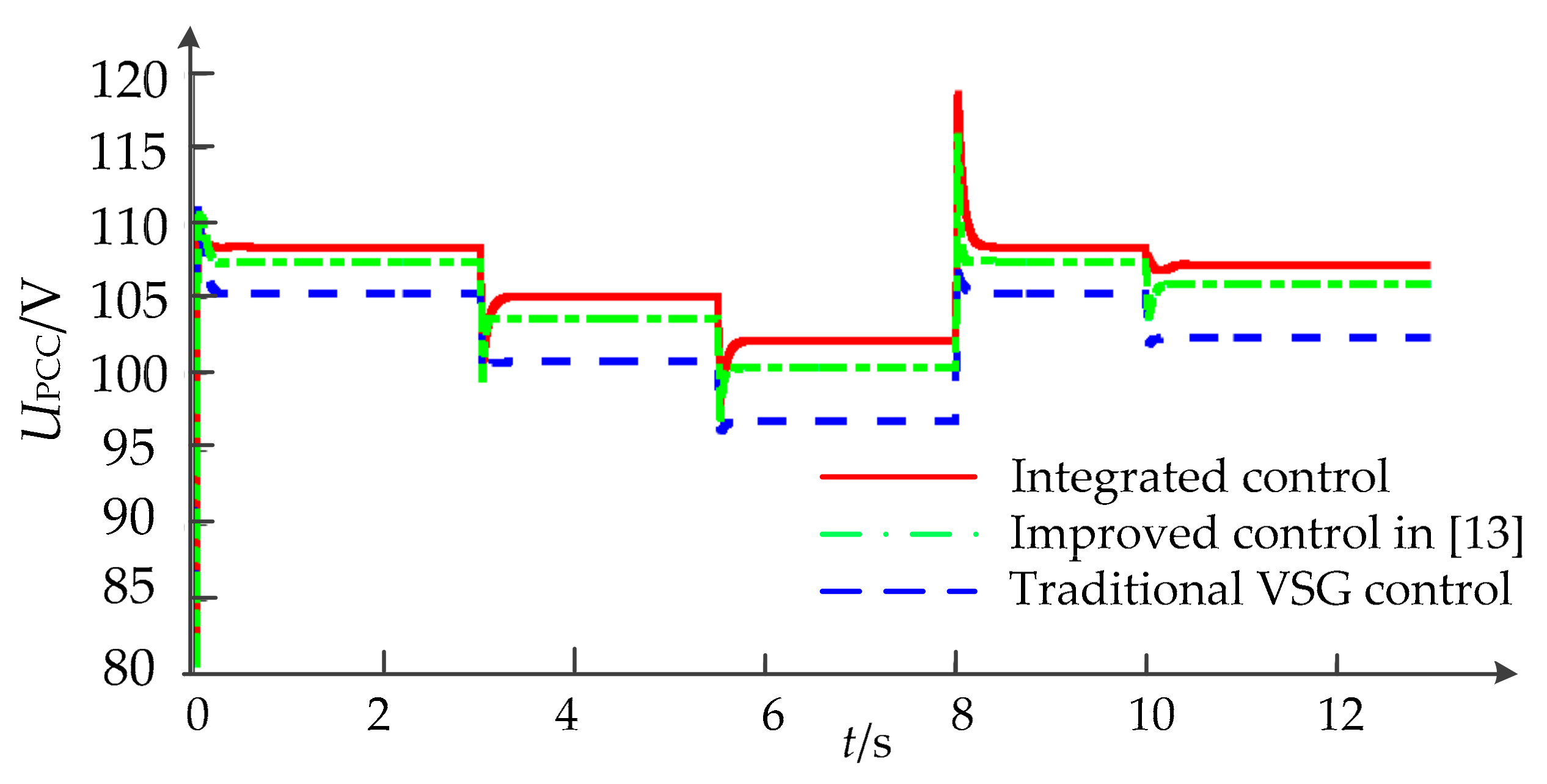
5.1. Simulation Verification
5.2. Experimental Verification
5.2.1. Experimental Condition 1
5.2.2. Experimental Condition 2
6. Conclusions
- (1)
- The integrated control strategy can realize the precise distribution of reactive power when line impedance is not matched. The voltage of the common connection point UPCC is directly controlled by compensating for line impedance voltage drop. The integrated control strategy can realize precise drop control of reactive voltage, optimize public bus voltage, and improve the robustness of a system.
- (2)
- The relative gain matrix is introduced to quantify and compare the power coupling relationship before and after the improvement. The small-signal model of a two-machine parallel system is established, and the reactive power equipartition error of the integrated control strategy is derived theoretically.
- (3)
- The proposed control strategy does not require the support of a communication system, and it can respond to load changes quickly and flexibly, providing a theoretical reference for the “plug-and-join” control of DGs.
- (4)
- The next step is to verify the proposed improved control strategy experimentally under multiple machine operations involving three or more machines.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
References
- Fang, J.; Deng, H.; Goetz, S.M. Grid Impedance Estimation through Grid-Forming Power Converters. IEEE Trans. Power Electron. 2021, 36, 2094–2104. [Google Scholar] [CrossRef]
- Hashmi, K.; Mansoor Khan, M.; Jiang, H.; Umair Shahid, M.; Habib, S.; Talib Faiz, M.; Tang, H. A Virtual Micro-Islanding-Based Control Paradigm for Renewable Microgrids. Electronics 2018, 7, 105. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. Distributed Power System Virtual Inertia Implemented by Grid-Connected Power Converters. IEEE Trans. Power Electron. 2017, 33, 8488–8499. [Google Scholar] [CrossRef]
- Zhong, Q.; Weiss, G. Synchronverters: Inverters That Mimic Synchronous Generators. IEEE Trans. Ind. Electron. 2011, 58, 1259–1267. [Google Scholar] [CrossRef]
- Zhong, Q.C. Power-electronics-enabled autonomous power systems: Architecture and technical routes. IEEE Trans. Ind. Electron. 2017, 64, 5907–5918. [Google Scholar] [CrossRef]
- Rasool, A.; Yan, X.; Rasool, H.; Guo, H.; Asif, M. VSG Stability and Coordination Enhancement under Emergency Condition. Electronics 2018, 7, 202. [Google Scholar] [CrossRef]
- Yan, X.; Rasool, A.; Abbas, F.; Rasool, H.; Guo, H. Analysis and Optimization of the Coordinated Multi-VSG Sources. Electronics 2019, 8, 28. [Google Scholar] [CrossRef]
- Sands, T. Control of DC Motors to Guide Unmanned Underwater Vehicles. Appl. Sci. 2021, 11, 2144. [Google Scholar] [CrossRef]
- Wu, X.; Shen, C.; Iravani, R. Feasible Range and Optimal Value of the Virtual Impedance for Droop-Based Control of Microgrids. IEEE Trans. Smart Grid. 2017, 8, 1242–1251. [Google Scholar] [CrossRef]
- Zhang, H.; Kim, S.; Sun, Q.; Zhou, J. Distributed Adaptive Virtual Impedance Control for Accurate Reactive Power Sharing Based on Consensus Control in Microgrids. IEEE Trans. Smart Grid. 2017, 8, 1749–1761. [Google Scholar] [CrossRef]
- Yao, W.; Chen, M.; Matas, J.; Guerrero, J.M.; Qian, Z. Design and Analysis of the Droop Control Method for Parallel Inverters Considering the Impact of the Complex Impedance on the Power Sharing. IEEE Trans. Ind. Electron. 2011, 58, 576–588. [Google Scholar] [CrossRef]
- Bai, X.; Miao, H.; Zeng, C. Improved Droop Control Strategy for Reactive Power Sharing of Parallel Inverters in Low-Voltage Microgrid. In Proceedings of the 2019 IEEE Innovative Smart Grid Technologies-Asia (ISGT Asia), Chengdu, China, 21–24 May 2019; pp. 2538–2543. [Google Scholar]
- Li, Q.; Chen, F.; Chen, M.; Guerrero, J.M.; Abbott, D. Agent-Based Decentralized Control Method for Islanded Microgrids. IEEE Trans. Smart Grid. 2016, 7, 637–649. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W.; Blaabjerg, F. An Enhanced Islanding Microgrid Reactive Power, Imbalance Power, and Harmonic Power Sharing Scheme. IEEE Trans. Power Electron. 2015, 30, 3389–3401. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Accurate Reactive Power Sharing in an Islanded Microgrid Using Adaptive Virtual Impedances. IEEE Trans. Power Electron. 2015, 30, 1605–1617. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhuo, F.; Wang, F.; Liu, B.; Zhao, Y. A Wireless Load Sharing Strategy for Islanded Microgrid Based on Feeder Current Sensing. IEEE Trans. Power Electron. 2015, 30, 6706–6719. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Bevrani, H.; Ise, T. Enhanced Virtual Synchronous Generator Control for Parallel Inverters in Microgrids. IEEE Trans. Smart Grid 2017, 8, 2268–2277. [Google Scholar] [CrossRef]
- Milczarek, A.; Malinowski, M.; Guerrero, J.M. Reactive Power Management in Islanded Microgrid—Proportional Power Sharing in Hierarchical Droop Control. IEEE Trans. Smart Grid 2015, 6, 1631–1638. [Google Scholar] [CrossRef]
- Yang, S.; Fang, J.; Tang, Y.; Qiu, H.; Dong, C.; Wang, P. Modular Multilevel Converter Synthetic Inertia-Based Frequency Support for Medium-Voltage Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 8992–9002. [Google Scholar] [CrossRef]
- Yan, X.; Cui, Y.; Cui, S. Control Method of Parallel Inverters with Self-Synchronizing Characteristics in Distributed Microgrid. Energies 2019, 12, 3871. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, X.; Liu, F.; Shi, R.; Yu, C.; Cao, R. A Reactive Power Sharing Strategy of VSG Based on Virtual Capacitor Algorithm. IEEE Trans. Ind. Electron. 2017, 64, 7520–7531. [Google Scholar] [CrossRef]
- Chen, J.; Yue, D.; Dou, C.; Chen, L.; Weng, S.; Li, Y. A Virtual Complex Impedance Based P-V Droop Method for Parallel-Connected Inverters in Low-Voltage AC Microgrids. IEEE Trans. Ind. Informat. 2021, 17, 1763–1773. [Google Scholar]
- Wu, T.; Liu, Z.; Liu, J.; Wang, S.; You, Z. A Unified Virtual Power Decoupling Method for Droop-Controlled Parallel Inverters in Microgrids. IEEE Trans. Power Electron. 2016, 31, 5587–5603. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Zhang, B.; Yan, X.; Li, D.; Zhang, X.; Han, J.; Xiao, X. Stable Operation and Small-Signal Analysis of Multiple Parallel DG Inverters Based on a Virtual Synchronous Generator Scheme. Energies 2018, 11, 203. [Google Scholar] [CrossRef]
- Yan, X.; Zhang, X.; Li, J.; Han, J. Inverter coupling evaluation and decoupling method based on dynamic relative gain. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar]
- Gupta, Y.; Chatterjee, K.; Doolla, S. A Simple Control Scheme for Improving Reactive Power Sharing in Islanded Microgrid. IEEE Trans. Power Syst. 2020, 35, 3158–3169. [Google Scholar] [CrossRef]
- Wu, H.; Ruan, X.; Yang, D.; Chen, X.; Zhao, W.; Lv, Z.; Zhong, Q.C. Small-Signal Modeling and Parameters Design for Virtual Synchronous Generators. IEEE Trans. Ind. Electron. 2016, 63, 4292–4303. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| DC-side voltage, Udc/V | 400 | Switching frequency, fpwm/kHz | 5 |
| Filter inductance, L/mH | 4 | Rated frequency, fs/Hz | 50 |
| Filter capacitor, C/uF | 10 | Common load impedance, Z0/Ω | 25 + j70 |
| Line impedance, Zline1/Ω | 1.5 + j0.157 | Line impedance, Zline2/Ω | 0.015 + j0.22 |
| Virtual impedance, Zv1/Ω | −1.35 + j1.257 | Virtual impedance, Zv2/Ω | −0.01 + j1.257 |
| Parameter | Value | ||
|---|---|---|---|
| VSG1 | VSG2 | VSG3 | |
| Virtual moment of inertia, J/(kg⋅m2) | 0.4 | 0.2 | 0.2 |
| Equivalent moment of inertia, K | 15 | 15 | 15 |
| Active droop coefficient, Dp | 5.06 | 2.53 | 2.53 |
| Reactive droop coefficient, Dq | 350 | 175 | 175 |
| Control Strategy | Time | Qei/Var | Qei/(∑QeN)/% | Qe1:Qe2:Qe3 | ||||
|---|---|---|---|---|---|---|---|---|
| VSG1 | VSG2 | VSG3 | VSG1 | VSG2 | VSG3 | |||
| Traditional VSG control | 0 ≤ t < 3 s 8 s ≤ t < 10 s | 892.6 | 1445 | 1445 | 21.2 | 38 | 38 | 1:1.62:1.62 |
| 3 s ≤ t < 5.5 s | 1863 | 2423 | 2423 | 26.6 | 34.6 | 34.6 | 1:1.3:1.3 | |
| 5.5 s ≤ t <8 s | 2736 | 3264 | 3264 | 27.6 | 33 | 33 | 1:1.19:1.19 | |
| 10 s ≤ t < 13 s | 1521 | 2037 | 0 | 40 | 53.6 | 0 | 1:1.34 | |
| Improved control in [13] | 0 ≤ t < 3 s 8 s ≤ t < 10 s | 1843 | 921 | 921 | 48.5 | 24.2 | 24.2 | 2:1:1 |
| 3 s ≤ t < 5.5 s | 3476 | 1738 | 1738 | 49.65 | 24.8 | 24.8 | 2:1:1 | |
| 5.5 s ≤ t < 8 s | 4866 | 2433 | 2433 | 49.7 | 24.8 | 24.8 | 2:1:1 | |
| 10 s ≤ t < 13 s | 2435 | 1218 | 0 | 64.1 | 32.1 | 0 | 2:1 | |
| Integrated control | 0 ≤ t < 3 s 8 s ≤ t < 10 s | 1936 | 928 | 928 | 50.9 | 24.4 | 24.4 | 2:1:1 |
| 3 s ≤ t < 5.5 s | 3501 | 1750 | 1750 | 50 | 25 | 25 | 2:1:1 | |
| 5.5 s ≤ t < 8 s | 4926 | 2463 | 2463 | 49.8 | 24.9 | 24.9 | 2:1:1 | |
| 10 s ≤ t < 13 s | 2542 | 1271 | 0 | 66.9 | 33.4 | 0 | 2:1 | |
| Control Strategy | 0 ≤ t < 3 s or 8 s ≤ t < 10 s | 3 s ≤ t < 5.5 s | 5.5 s ≤ t < 8 s | 10 s ≤ t < 13 s | ||||
|---|---|---|---|---|---|---|---|---|
| UPCC/V | ΔUPCC/% | UPCC/V | ΔUPCC/% | UPCC/V | ΔUPCC/% | UPCC/V | ΔUPCC/% | |
| Traditional VSG control | 105.40 | −4.18 | 100.90 | −8.27 | 97.02 | −11.8 | 102.50 | −6.81 |
| Improved control in [13] | 107.50 | −2.27 | 103.80 | −5.64 | 100.50 | −8.63 | 106.00 | −3.64 |
| Integrated control | 108.50 | −1.36 | 105.20 | −4.36 | 102.30 | −7.00 | 107.30 | −2.45 |
| Control Strategy | Reactive Power at Initial Steady-State | Reactive Power at Steady-State Perturbation | ||
|---|---|---|---|---|
| Q1/Var | Q2/Var | Q1/Var | Q2/Var | |
| Traditional VSG control | 30 | 580 | 250 | 1420 |
| Integrated control | 320 | 315 | 920 | 890 |
| Control Strategy | Reactive Power at Initial Steady-State | Reactive Power at Steady-State Perturbation | ||
|---|---|---|---|---|
| Q1/Var | Q2/Var | Q1/Var | Q2/Var | |
| Traditional VSG control | −130 | 740 | 160 | 1490 |
| Integrated control | 430 | 210 | 1150 | 550 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, X.; Ma, H.; Jia, J.; Aslam, W.; Wang, C.; Zhang, S.; Liang, B. Precise Reactive Power-Voltage Droop Control of Parallel Virtual Synchronous Generators That Considers Line Impedance. Electronics 2021, 10, 1344. https://doi.org/10.3390/electronics10111344
Yan X, Ma H, Jia J, Aslam W, Wang C, Zhang S, Liang B. Precise Reactive Power-Voltage Droop Control of Parallel Virtual Synchronous Generators That Considers Line Impedance. Electronics. 2021; 10(11):1344. https://doi.org/10.3390/electronics10111344
Chicago/Turabian StyleYan, Xiangwu, Hongbin Ma, Jiaoxin Jia, Waseem Aslam, Chenguang Wang, Shizheng Zhang, and Baixue Liang. 2021. "Precise Reactive Power-Voltage Droop Control of Parallel Virtual Synchronous Generators That Considers Line Impedance" Electronics 10, no. 11: 1344. https://doi.org/10.3390/electronics10111344
APA StyleYan, X., Ma, H., Jia, J., Aslam, W., Wang, C., Zhang, S., & Liang, B. (2021). Precise Reactive Power-Voltage Droop Control of Parallel Virtual Synchronous Generators That Considers Line Impedance. Electronics, 10(11), 1344. https://doi.org/10.3390/electronics10111344