An Experimental Characterization for Injection Quantity of a High-pressure Injector in GDI Engines



Abstract
1. Introduction
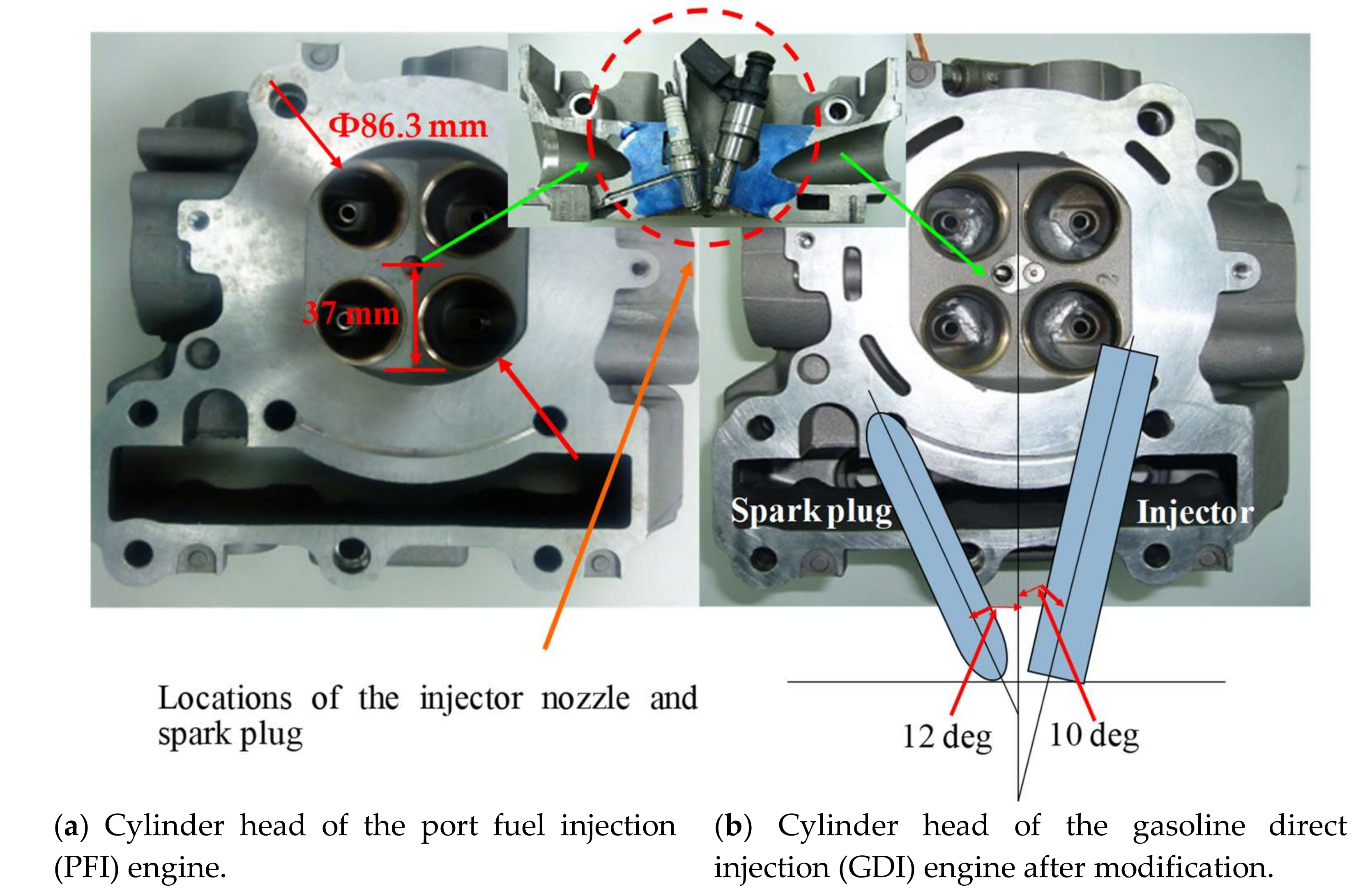
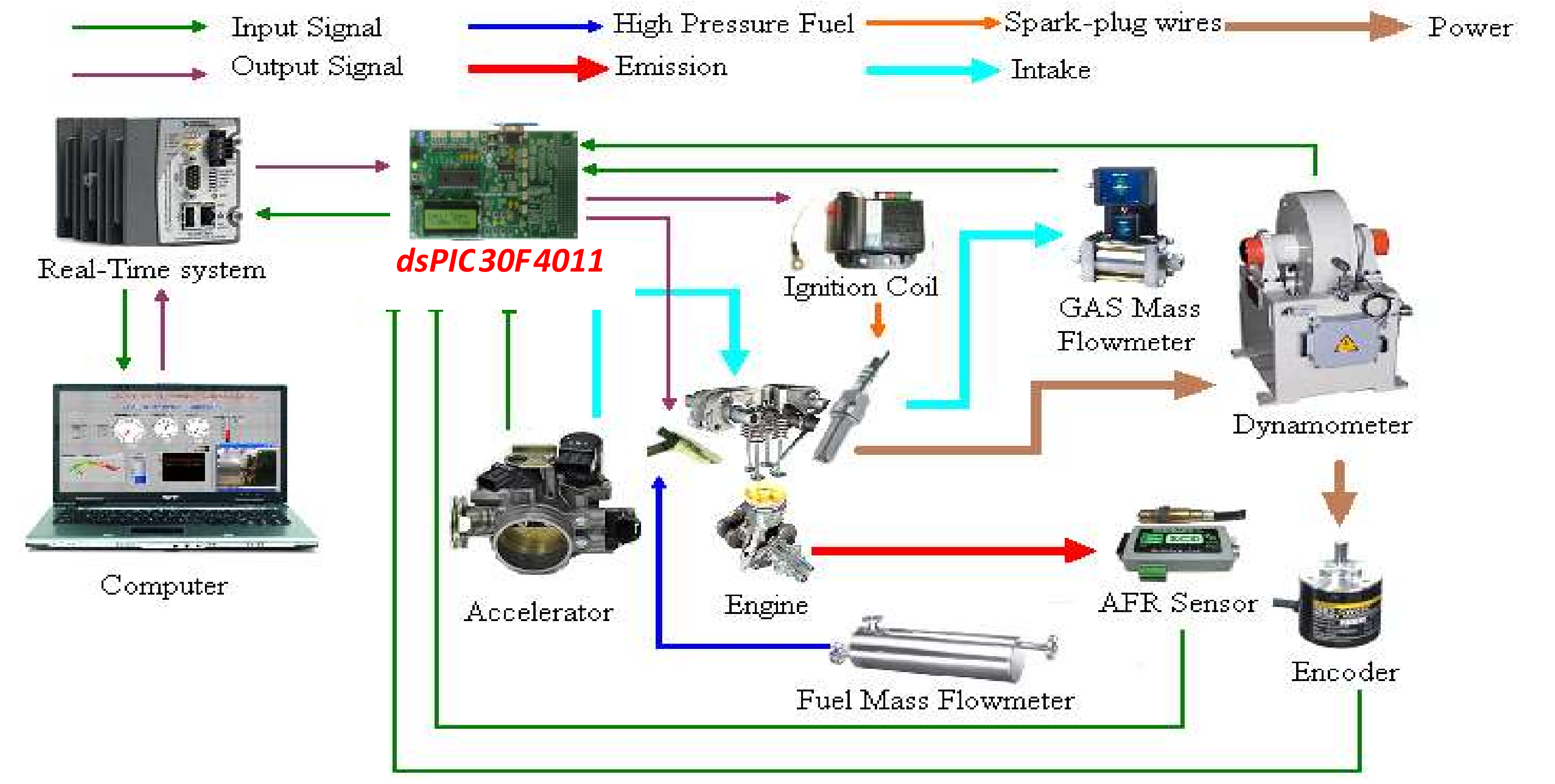
2. The Modified KYMCO Xciting-500 GDI Engine
2.1. The High-Pressure GDI Fuel Injection System
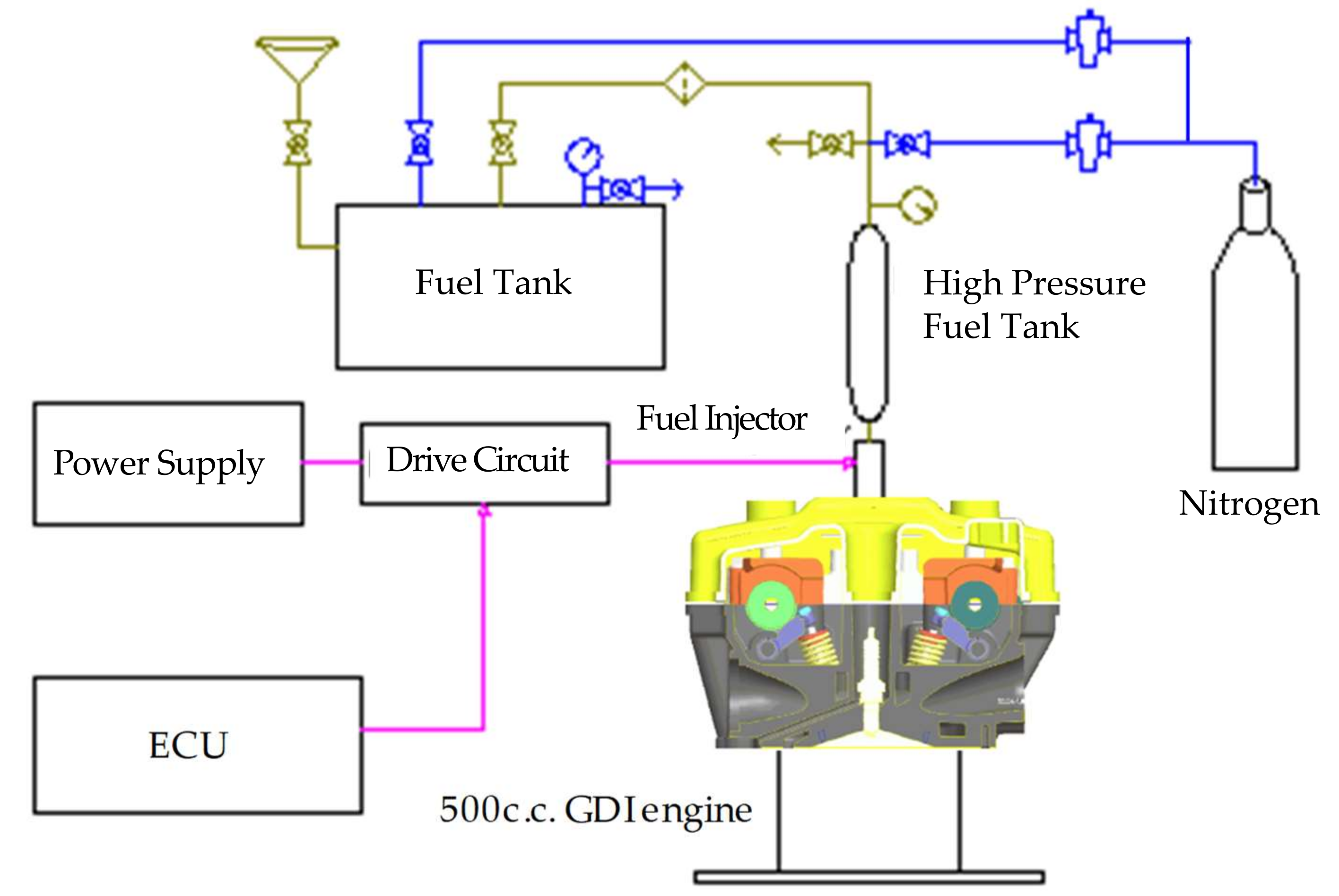
2.2. Fuel Supply System
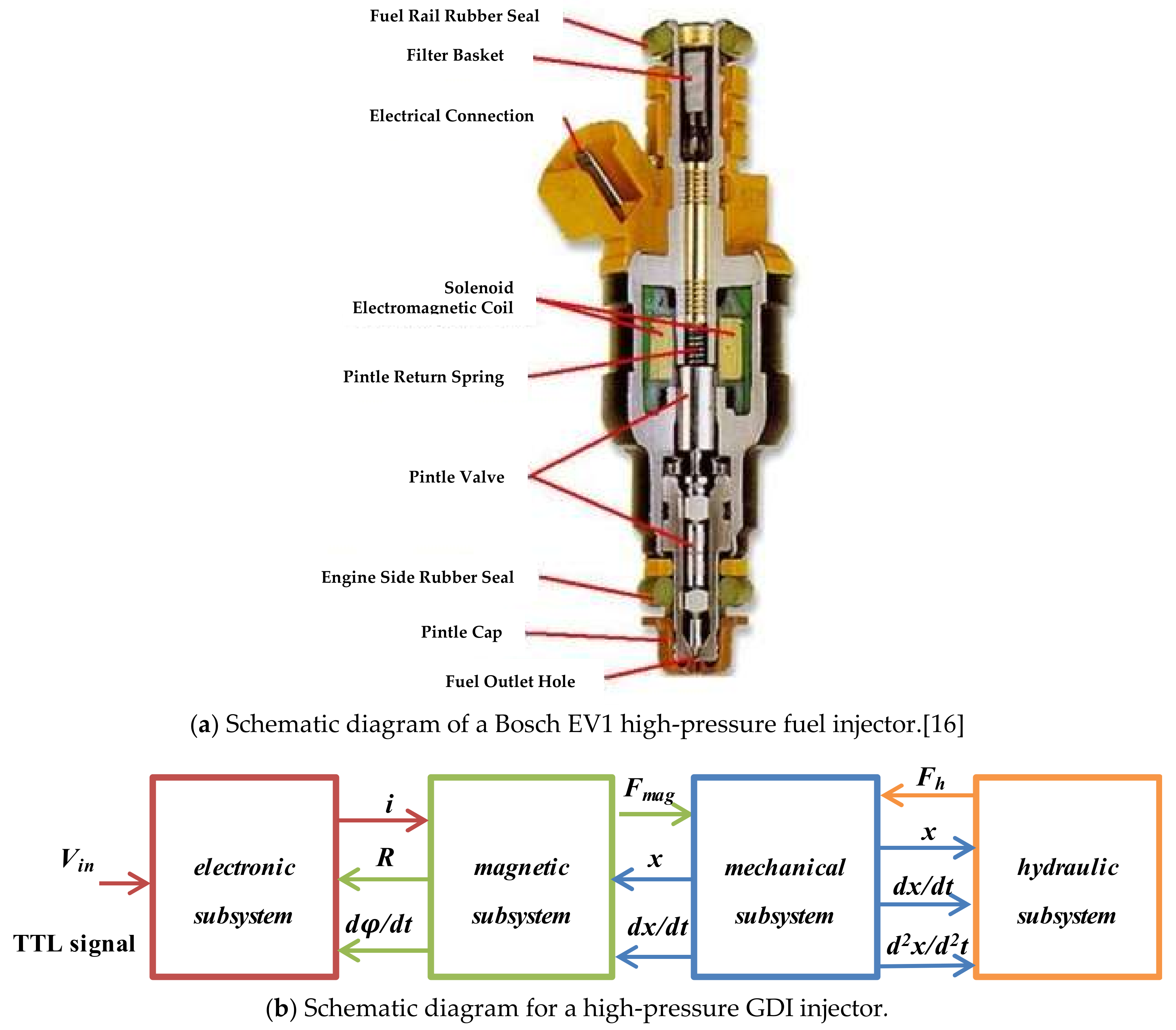
2.3. High-pressure Fuel Injector
2.4. Mathematical Model
2.5. Data Acquisition Card and ECU Controller
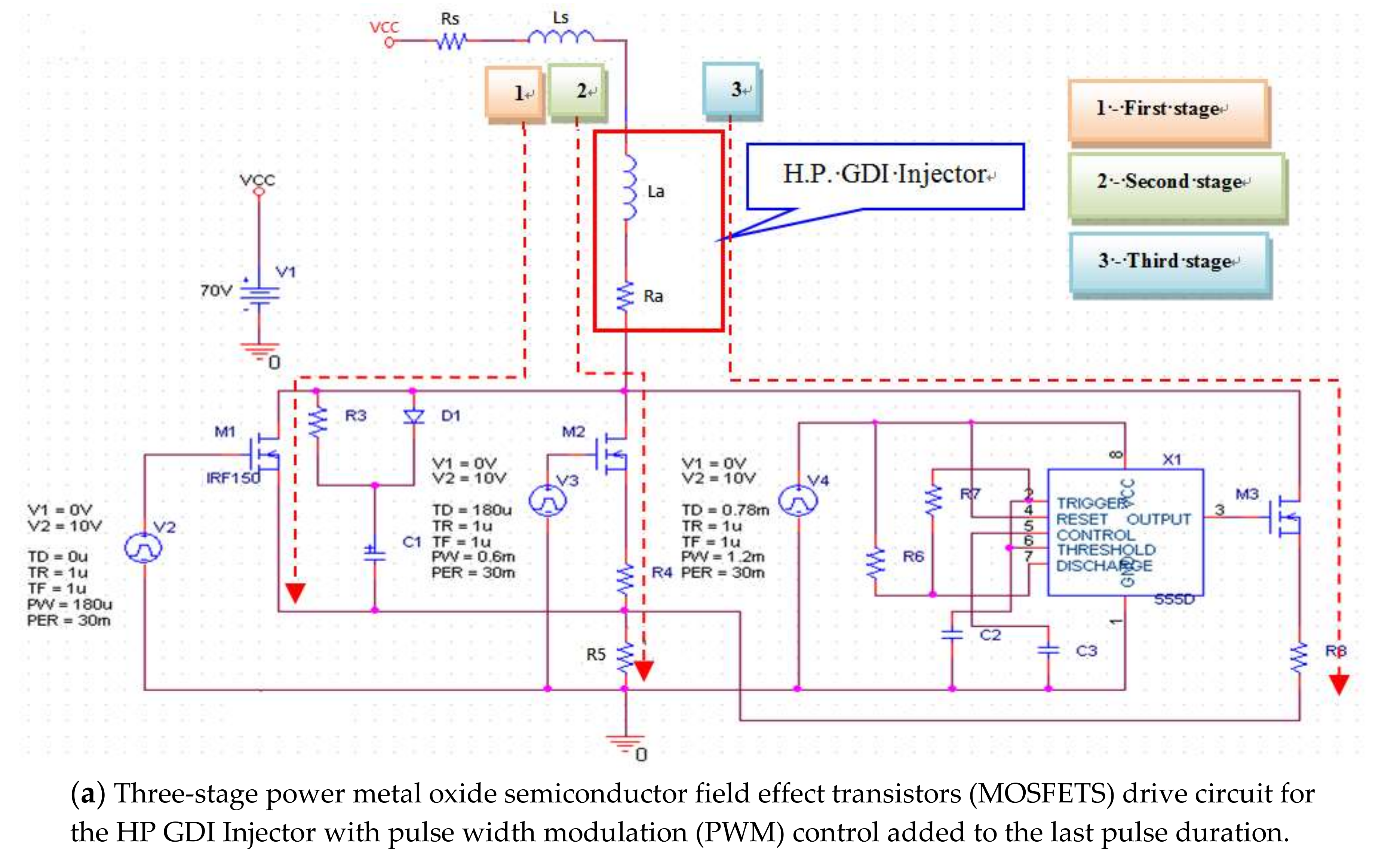
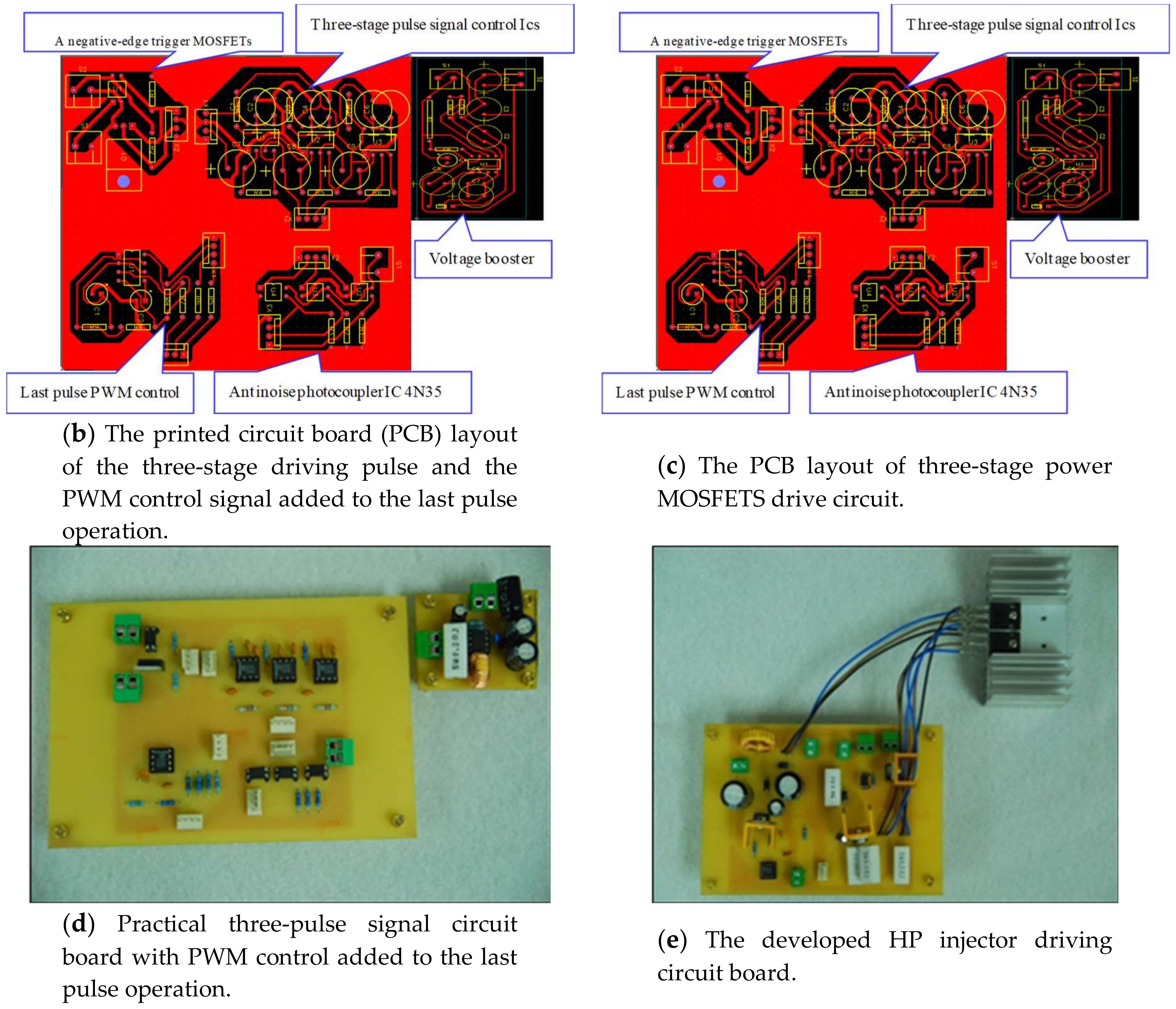
3. Development of Fuel Injector Drive Circuit
3.1. Injector Drive Circuit
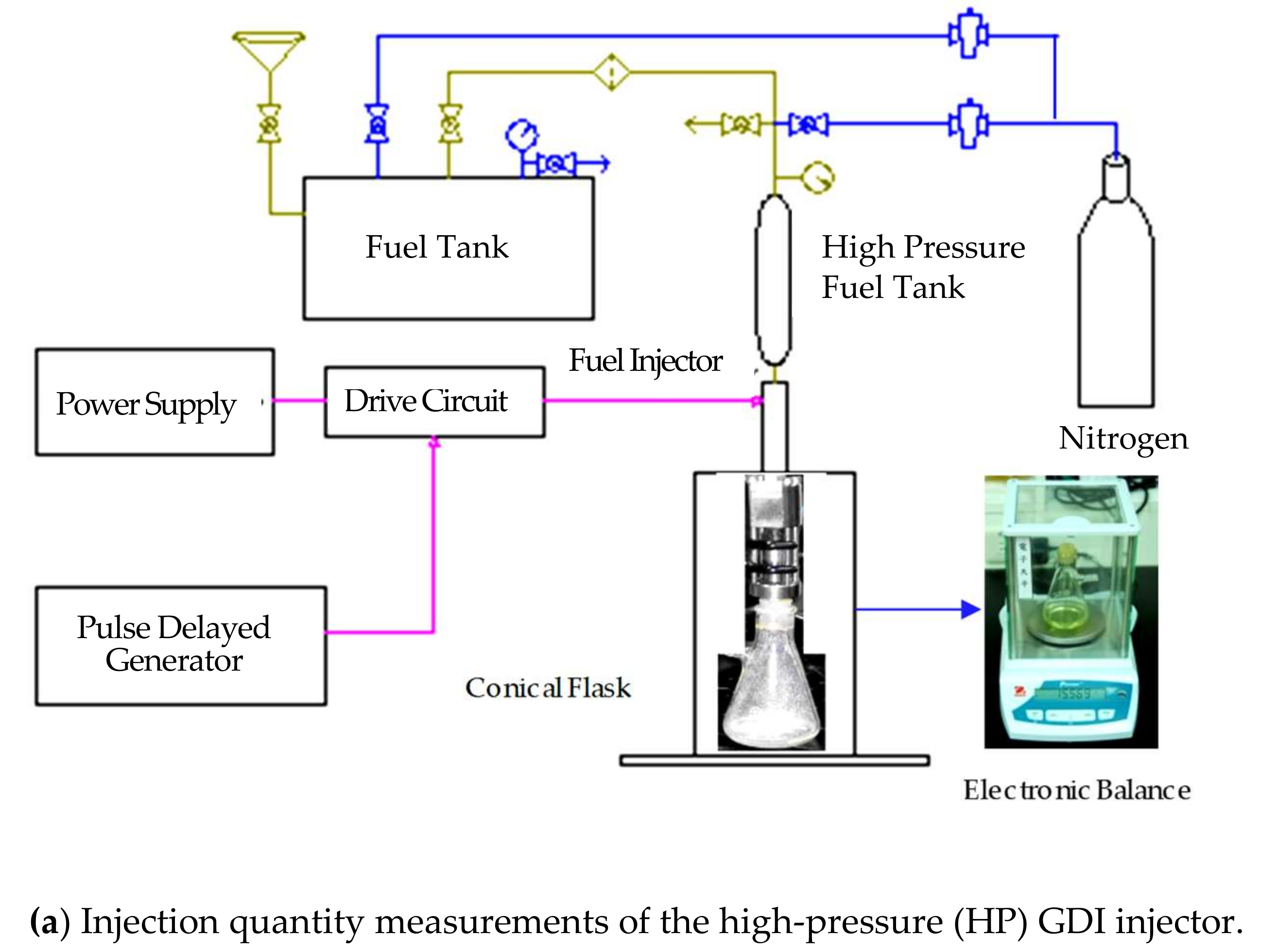
3.2. Experimental Procedures and Measurement Conditions
4. Results and Discussions
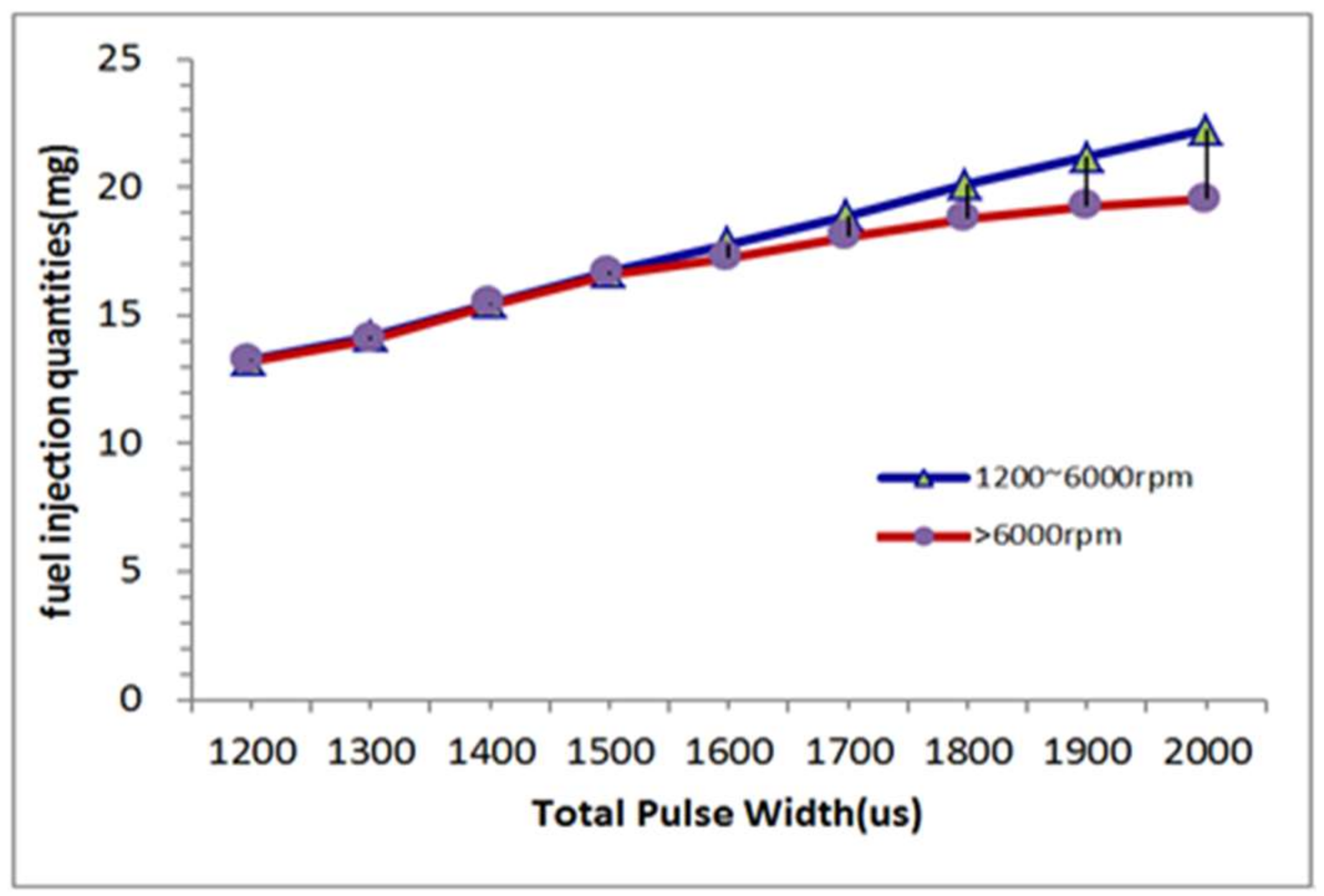
4.1. Effect of Total Pulse Width
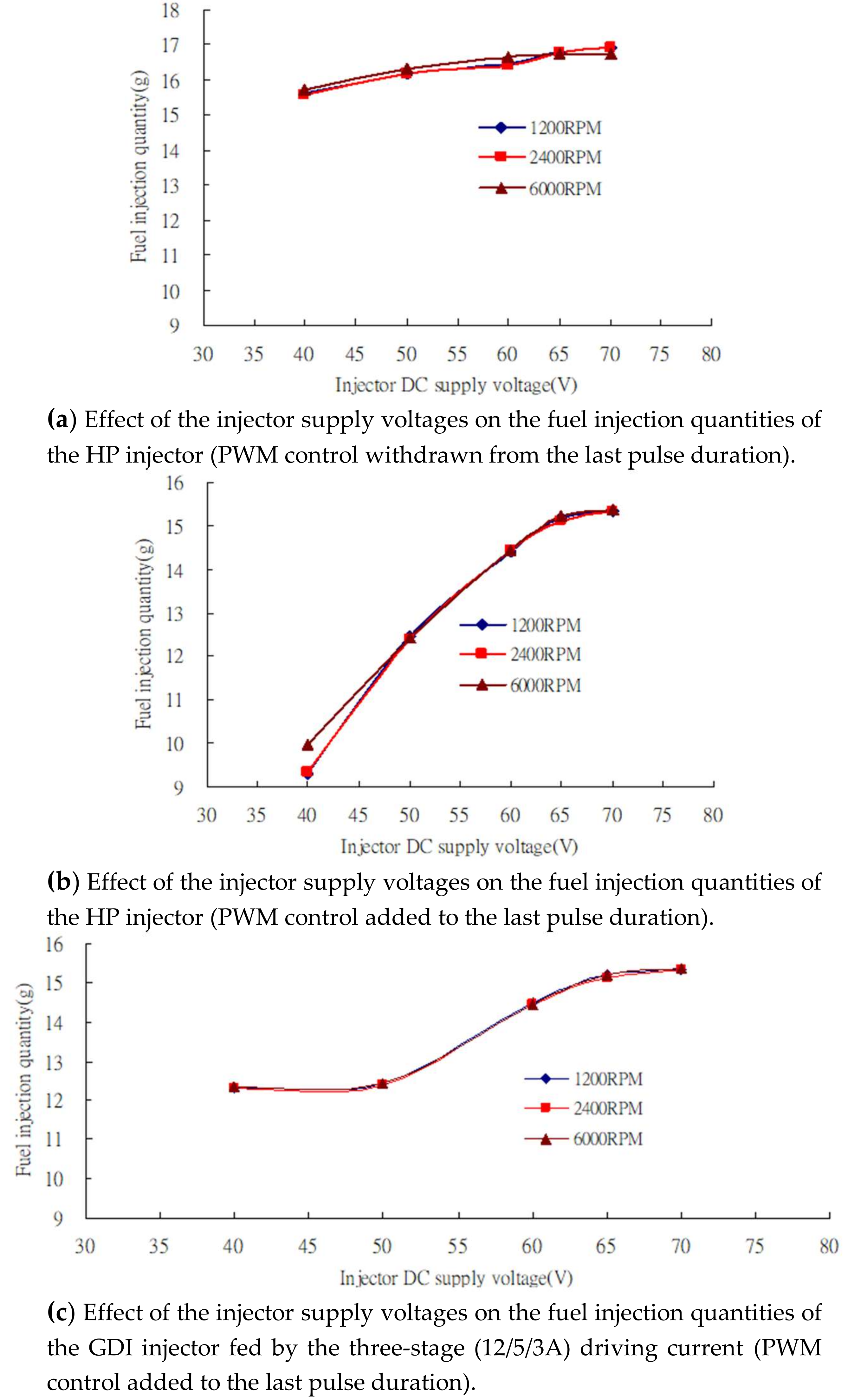
4.2. Effect of Injector’s Supply Voltage and PWM Operation
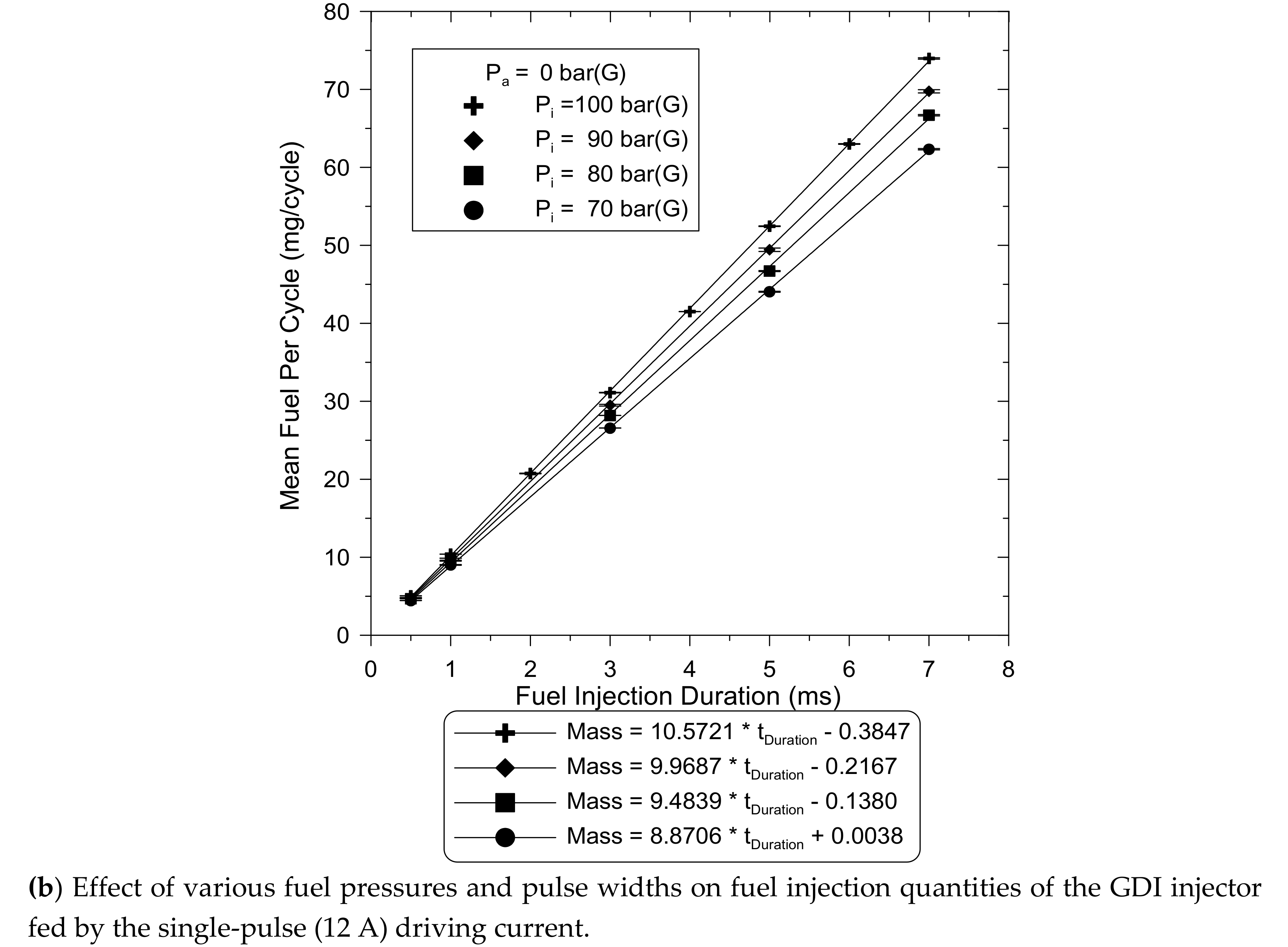
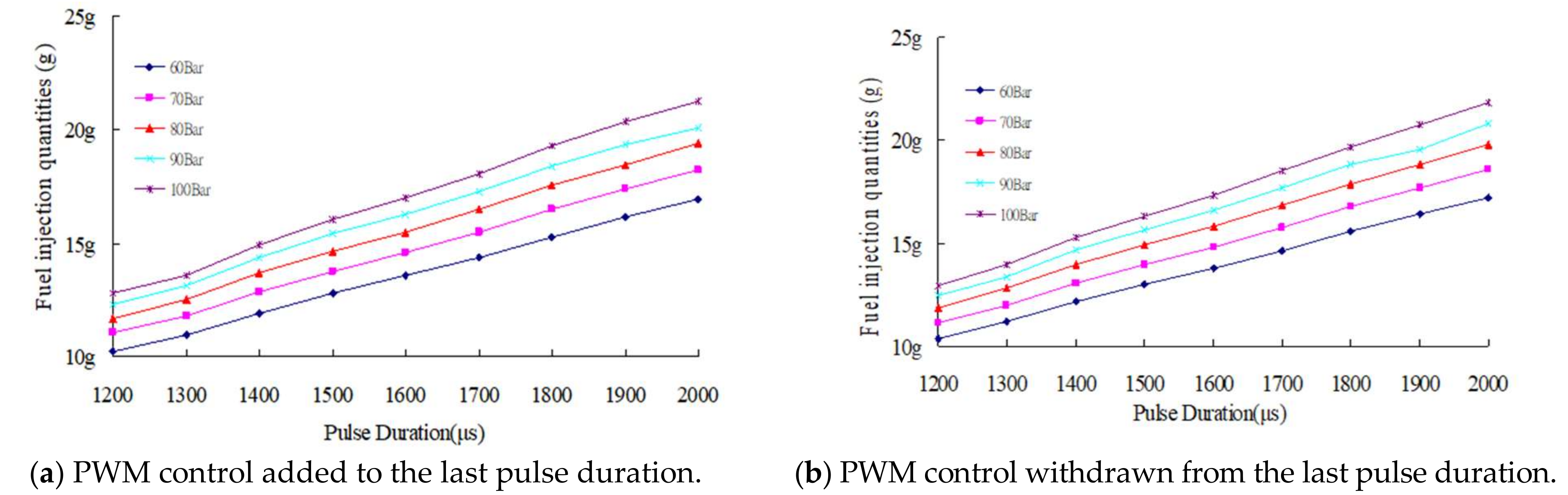
4.3. Effect of Fuel Pressure and PWM Operation
mfuel = 1.038 tp + 11.429 for 90 bars
mfuel = 0.994 tp + 10.879 for 80 bars
mfuel = 0.932 tp + 10.195 for 70 bars
mfuel = 0.852 tp + 9.5241 for 60 bars (R2 = 0.9988)
mfuel = 0.9965 tp + 11.297 for 90 bars
mfuel = 0.9726 tp + 10.681 for 80 bars
mfuel = 0.9067 tp + 10.089 for 70 bars
mfuel = 0.8438 tp + 9.3587 for 60 bars (R2 = 0.9985)
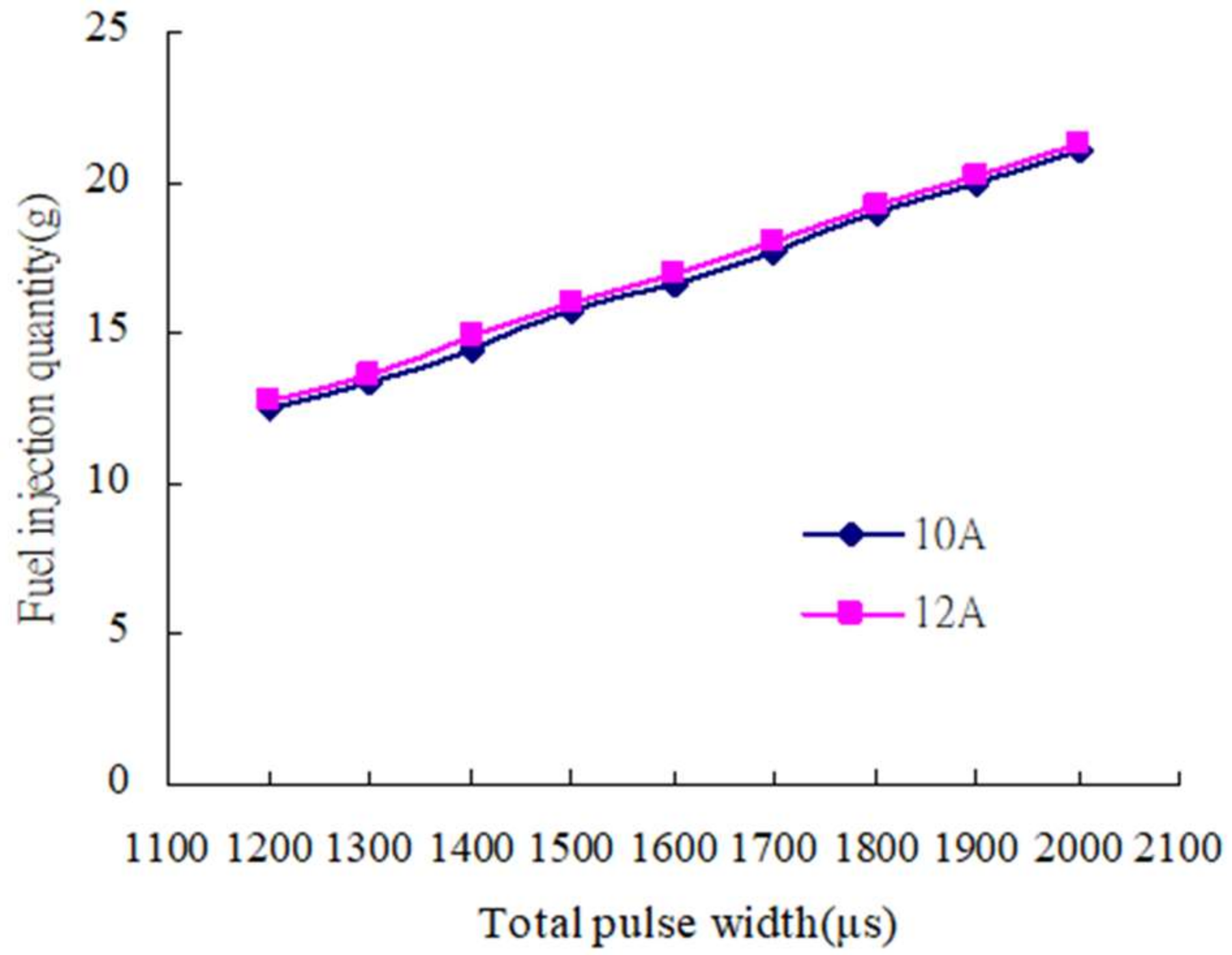
4.4. Effect of First-Stage Turn-on Pulse Width
mfuel_10 A = 1.0868 tp – 11.24 for all engine speeds (R2 = 0.9989)
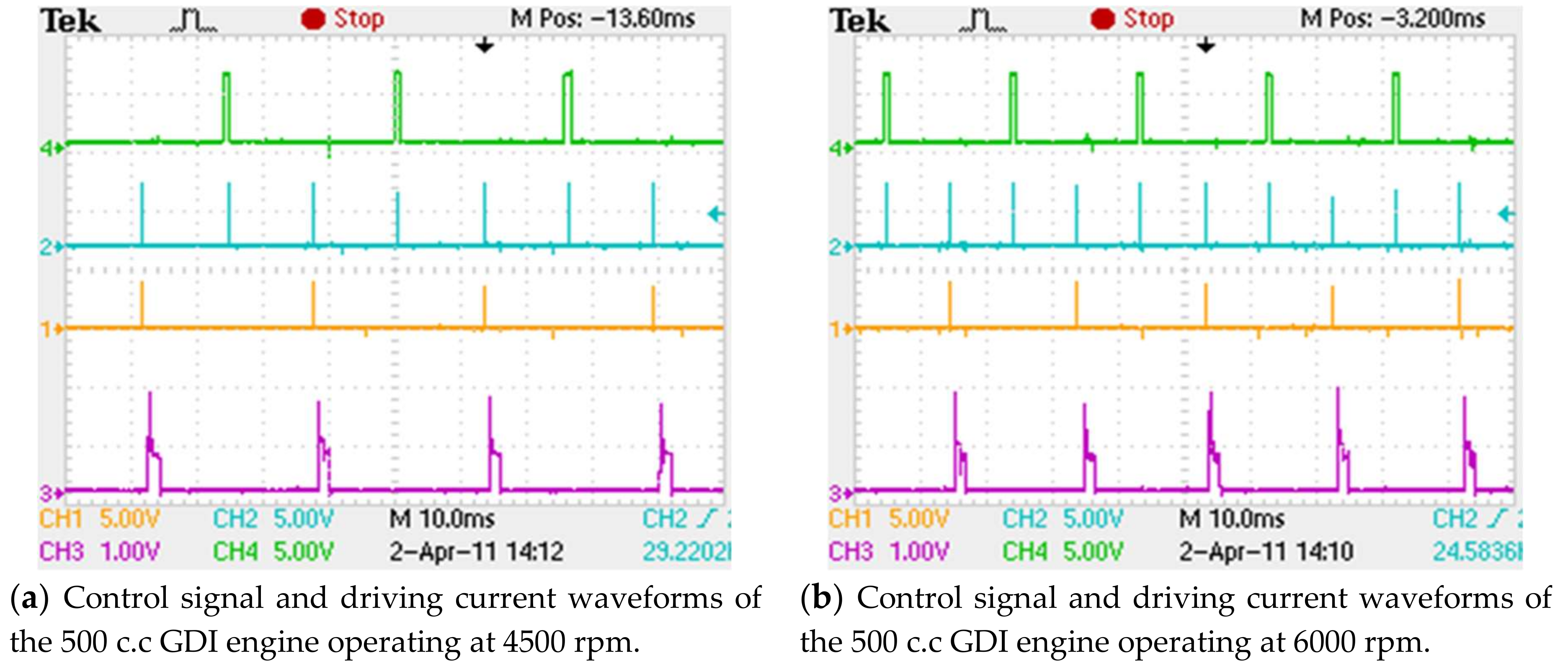
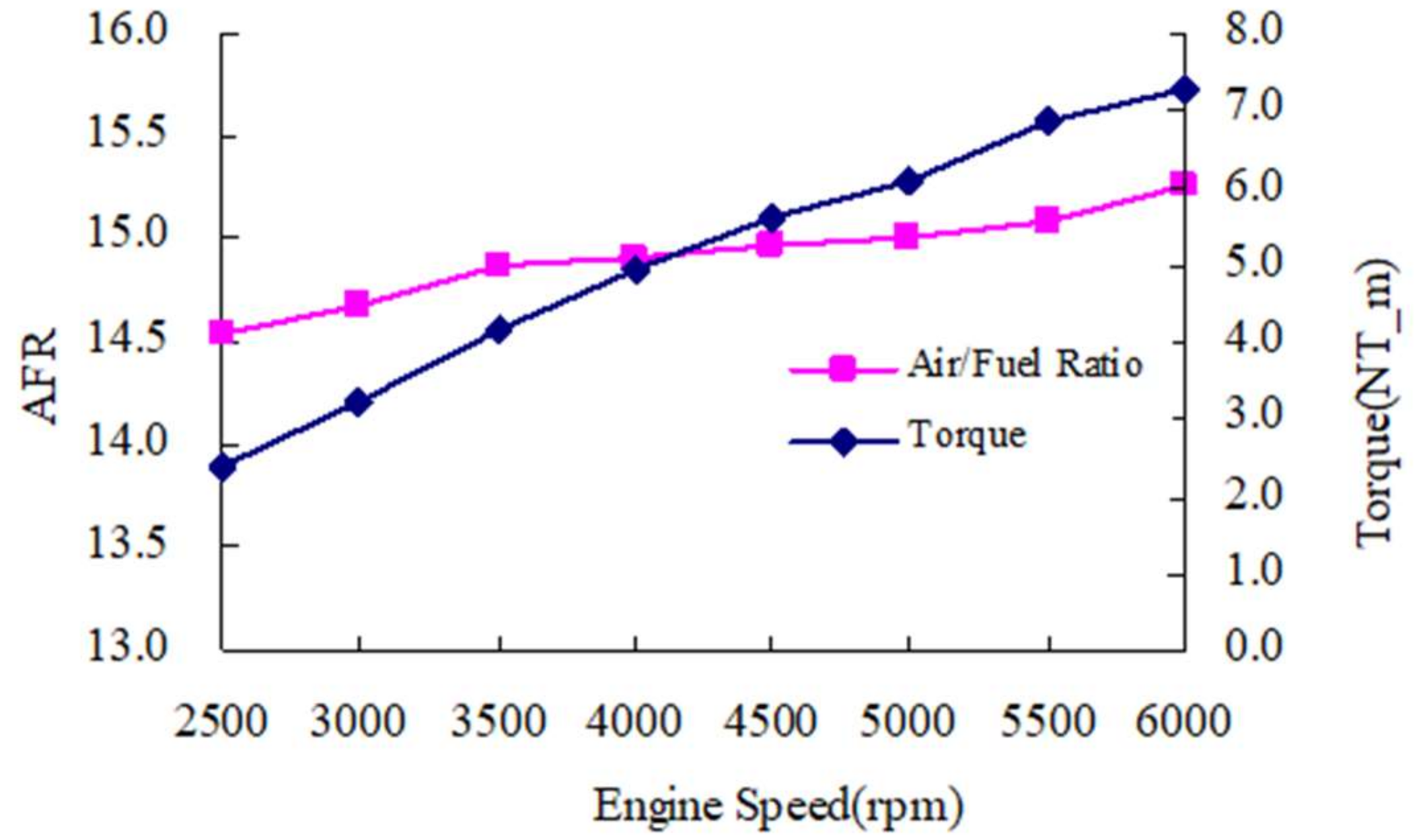
4.5. Experiments on a 500 c.c. GDI Motorcycle Engine
5. Conclusions
- 1.
- The designed GDI injector drive circuit improved the injector’s performance and provided more stable and accurate fuel injection quantities in the HP fuel injecting system. The power supply voltage of the HP injector needed to be operated and held in excess of DC 60 V, to squirt adequate fuel quantities. Otherwise, the 500 c.c. motorcycle GDI engine would run a transition from homogeneous combustion to lean burn combustion, or even misfire.
- 2.
- The developed injector drive circuit was realized well in both experiments and practical applications. The experimental results show that the fuel injection quantities without the PWM control mode are more than those with the PWM control mode for the injecting tests of the HP GDI injector. The fuel injection quantities increased significantly, due to the PWM control withdrawn from the third-stage holding current (2.5 A). This holding current was adequate to pick up and hold the HP nozzle needle, and hence, the HP injector can sustain the injection of fuel during the last pulse operation. Therefore, the HP GDI injector should be supplied by a three-stage 12/5/2.5 A without PWM control modes added to the last pulse duration. Third-stage holding current amplitudes should be kept higher than 3 A if PWM control modes are added to the last pulse duration to achieve the HP GDI injector close faster and achieve the lowest amount of power consumption.
- 3.
- The HP fuel GDI injector provides a more stable and accurate fuel injection quantities at an operating speed range between 1500 rpm and 6000 rpm. In a 500 c.c. motorcycle GDI engine test, the fuel injection quantities of the GDI injector in the engine were controlled by using the derived fuel injection curves. The engine speed was limited to 6000 rpm, because of the mechanical resonance occurring at the engine test stand between 6200 rpm and 6300 rpm. It is dangerous to achieve the complete HP fuel injecting experiment when the 500 c.c. motorcycle GDI engine exceeds 6000 rpm.
Author Contributions
Funding
Acknowledgements
Conflicts of Interest
Nomenclature
| Symbols | Description | Unit |
| SGDI | Spray Guided Direct Injection | |
| HP | High-pressure | bar |
| GDI | Gasoline-direct-injection | |
| AFR | Air-fuel ratio | |
| TTL | Transistor-Transistor Logic | |
| ICs | Integrated Circuits | |
| MOSFET | Metal oxide semiconductor field effect transistor | |
| PWM | Pulse width modulation | |
| ECU | Electronic control unit | |
| PFI | Port fuel injection | |
| PCB | Printed circuit board | |
| KVL | Kirchhoff's Voltage Law | |
| TDC | Top dead left | |
| rpm | revolutions per minute | |
| Ip1 | First turn-on pulse signal | |
| mfuel | Fuel injection mass | g |
| tp | Injection pulse duration | μs |
References
- Zhao, F.; Lai, M.C.; Harrington, D.L. Automotive spark-ignited direct-injection gasoline engines. Prog. Energy Combust. Sci. 1999, 25, 437–562. [Google Scholar] [CrossRef]
- Wang, C.; Xu, H.; Herreros, J.M.; Wang, J.; Cracknell, R. Impact of fuel and injection system on particle emissions from a GDI engine. Appl. Energy 2014, 132, 178–191. [Google Scholar] [CrossRef]
- Xu, H.; Ma, X.; Sarangi, A.K.; Weall, A.; Krueger-Venus, J. Fuel injector deposits in direct injection spark-ignition engines. Prog. Energy Combust. Sci. 2015, 50, 63–80. [Google Scholar] [CrossRef]
- Leach, F.; Knorsch, T.; Laidig, C.; Wiese, W. A Review of the Requirements for Injection Systems and the Effects of Fuel Quality on Particulate Emissions from GDI Engines; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Raza, M.; Chen, L.; Leach, F.; Ding, S. A review of particulate number (PN) emissions from gasoline direct injection (GDI) engines and their control techniques. Energies 2018, 11, 1417. [Google Scholar] [CrossRef]
- Guo, H.; Gao, W.; Liu, X.; Zhang, Z. Study on measurement system of the dynamic performances for an electronic fuel injector. In Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation (ICMTMA 2010), Changsha, China, 13–14 March 2010; pp. 608–611. [Google Scholar]
- Zhang, X.; Palazzolo, A.; Kweon, C.B.; Thomas, E.; Tucker, R.; Kascak, A. Direct fuel injector power drive system optimization. SAE Int. J. Engines 2014, 7, 1137–1154. [Google Scholar] [CrossRef]
- Zhang, J.Q.; Ouyang, G.Y. Optimization design of the electronically controlled injector. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1996–2001. [Google Scholar]
- Tsai, W.C.; Wu, Z.H. Use of Taguchi method to optimize the operating parameters of a high-pressure injector driving circuit. Appl. Mech. Mater. 2011, 130, 2795–2799. [Google Scholar] [CrossRef]
- Tsai, W.C.; Yu, P.C. Design of the electrical drive for the high-pressure GDI injector in a 500cc motorbike engine. Int. J. Eng. Ind. 2011, 2, 70–83. [Google Scholar]
- Cheng, Q.; Zhang, Z.; Xie, N. Power losses and dynamic response analysis of ultra-high speed solenoid injector within different driven strategies. Appl. Therm. Eng. 2015, 91, 611–621. [Google Scholar] [CrossRef]
- Bai, Y.; Fan, L.Y.; Ma, X.Z.; Peng, H.L.; Song, E.Z. Effect of injector parameters on the injection quantity of common rail injection system for diesel engines. Int. J. Automot. Technol. 2016, 17, 567–579. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y.Q.; Wang, D.F. The Design of Driving Circuit of GDI Injector and Experimental Verification based on L9707 Chip. Intern. Combust. Engine Powerpl. 2010, 1, 1–6. [Google Scholar]
- Hu, Y.Z.; Teng, Q.; Liu, J.S. Development of a driver circuit for GDI high pressure injector. Electron. Des. Eng. 2011, 19, 141–144. [Google Scholar]
- LM1949 Injector Drive Controller Datasheet; Texas Instruments: Dallas, TX, USA. 2013. Available online: http://www.ti.com/lit/ds/symlink/lm1949.pdf (accessed on 28 September 2018).
- Bosch EV1 high-pressure fuel injector; Professional Fuel Injector Cleaning and Flow Testing Service Glenville NY, USA. 2018. Available online: http://injectorrepair.com/knowledge-base/ (accessed on 28 September 2018).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Xciting-500 c.c. | |
|---|---|
| Engine type | single cylinder, four strokes, water cooling |
| Displacement | 498.5 mm3 |
| Bore × Stroke | Φ92 × 75 mm |
| Compression ratio | 10.5 |
| Maximum power | 28.4/7500 (kW/rpm) |
| Maximum torque | 4.1/5500 (kg-m/rpm) |
| Ignition method | Crystal |
| Spark plug | NGK CR7E |
| Condition | Description |
|---|---|
| Supply voltages | DC 40–70 V |
| Current profiles Max | 12/5/3 A |
| Fuel pressure | 60–100 Bars |
| Fuel temperature | 30 °C |
| Number of injection samples | 1000 |
| Pulse Width | rpm | 10 A | 12 A | Variation |
|---|---|---|---|---|
| 1200 μs | 1200 | 12.452 | 12.733 | −0.281 |
| 2400 | 12.515 | 12.768 | −0.253 | |
| 6000 | 12.529 | 12.739 | −0.210 | |
| 9000 | 12.596 | 12.513 | 0.083 | |
| 1300 μs | 1200 | 13.288 | 13.566 | −0.278 |
| 2400 | 13.411 | 13.607 | −0.196 | |
| 6000 | 13.384 | 13.602 | −0.218 | |
| 9000 | 13.427 | 13.343 | 0.084 | |
| 1400 μs | 1200 | 14.402 | 14.866 | −0.464 |
| 2400 | 14.489 | 14.883 | −0.394 | |
| 6000 | 14.549 | 14.925 | −0.376 | |
| 9000 | 14.591 | 14.613 | 0.122 | |
| 1500 μs | 1200 | 15.716 | 16.001 | −0.285 |
| 2400 | 15.838 | 16.042 | −0.204 | |
| 6000 | 15.893 | 16.098 | −0.205 | |
| 9000 | 15.914 | 15.758 | 0.156 | |
| 1600 μs | 1200 | 16.639 | 16.931 | −0.292 |
| 2400 | 16.753 | 17.298 | −0.545 | |
| 6000 | 16.818 | 17.036 | −0.218 | |
| 9000 | 16.844 | 16.691 | 0.153 | |
| 1700 μs | 1200 | 17.671 | 18.023 | −0.352 |
| 2400 | 17.802 | 18.237 | −0.435 | |
| 6000 | 17.888 | 18.188 | −0.300 | |
| 9000 | 17.924 | 17.773 | 0.151 | |
| 1800 μs | 1200 | 18.939 | 19.254 | −0.315 |
| 2400 | 19.06 | 19.308 | −0.248 | |
| 6000 | 19.172 | 19.426 | −0.254 | |
| 9000 | 19.198 | 18.972 | 0.226 | |
| 1900 μs | 1200 | 19.952 | 20.246 | −0.294 |
| 2400 | 20.102 | 20.444 | −0.342 | |
| 6000 | 20.219 | 20.428 | −0.209 | |
| 9000 | 20.238 | 19.956 | 0.282 | |
| 2000 μs | 1200 | 20.998 | 21.325 | −0.327 |
| 2400 | 21.156 | 21.342 | −0.186 | |
| 6000 | 21.279 | 21.509 | −0.230 | |
| 9000 | 21.308 | 20.991 | 0.317 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsai, W.-C.; Zhan, T.-S. An Experimental Characterization for Injection Quantity of a High-pressure Injector in GDI Engines. J. Low Power Electron. Appl. 2018, 8, 36. https://doi.org/10.3390/jlpea8040036
Tsai W-C, Zhan T-S. An Experimental Characterization for Injection Quantity of a High-pressure Injector in GDI Engines. Journal of Low Power Electronics and Applications. 2018; 8(4):36. https://doi.org/10.3390/jlpea8040036
Chicago/Turabian StyleTsai, Wen-Chang, and Tung-Sheng Zhan. 2018. "An Experimental Characterization for Injection Quantity of a High-pressure Injector in GDI Engines" Journal of Low Power Electronics and Applications 8, no. 4: 36. https://doi.org/10.3390/jlpea8040036
APA StyleTsai, W.-C., & Zhan, T.-S. (2018). An Experimental Characterization for Injection Quantity of a High-pressure Injector in GDI Engines. Journal of Low Power Electronics and Applications, 8(4), 36. https://doi.org/10.3390/jlpea8040036