1. Introduction
The direct torque control (DTC) algorithm is based on the error between the reference and estimated values of torque and flux. Inverter states can be directly controlled by reducing the torque and flux errors within band limits [
1]. The conventional proportional–integral–derivative (PID) control is still widely used as a speed regulator in DTC systems [
2]. However, the induction motor (IM) has multivariable, strong coupling, nonlinear, and time-varying characteristics. A fuzzy PID motor speed regulator is used for adjusting the nonlinear control variable and for enhancing the speed, response, and stability of a DTC system [
3]. Furthermore, the model predictive direct torque control (MPDTC) algorithm is used to maintain the motor torque, stator flux, and the inverter’s neutral point potential within the given hysteresis bounds by reducing the average switching frequency of the inverter, unlike the process in the conventional DTC method. Studies have reported that the MPDTC algorithm can achieve an average inverter switching frequency reduction of 16.5% [
4,
5].
In IM drive systems, the quick-response scheme is based on the limit cycle control of both flux and torque [
6]. A low switching frequency is used in an inverter to achieve a rapid dynamic response. This is achieved by rapidly equaling the torque and flux to the reference values. The switching technique mainly contributes to large torque and flux errors, which generate additional torque and flux ripples in the motor control system [
7]. To achieve a high IM control performance, decrease the variation in the torque and flux by applying the fuzzy theory, and lower the average inverter switching frequency with respect to the conventional DTC algorithm, a combination of fuzzy control and a predictive direct torque control (PDTC) algorithm has been proposed.
The model predictive control (MPC) algorithm has been used in various branches of automotive research. Borhan and Vahidi proposed an online optimization-based predictive controller to control power-split hybrid electric vehicles [
8]. Suzuki et al. implemented an individual air-fuel estimation and control by using an MPC controller [
9]. Bageshwar et al. computed the spacing-control laws for the transitional maneuvers of vehicles by using the MPC algorithm [
10]. Saerens et al. presented the application of MPC in the control of conventional powertrains instead of hybrid powertrains [
11]. He et al. illustrated an MPC-based torque demand control approach for the torque-based control of a parallel hybrid powertrain, which comprised a torque distributor, a nonlinear MPC controller, a linear MPC controller of the permanent-magnet synchronous motor, and a torque load observer [
12]. According to the aforementioned review, the linear MPC algorithm is designed with current feedback. In other words, the MPC algorithm is implemented with closed-loop control, which results in a slow response from the controller. In the proposed PDTC algorithm, a modified predictive compensation circuit with open-loop control is used to speed up the controller’s response. Furthermore, subtracting the previous flux
φs[
k − 1] from the present flux
φs[
k] greatly reduces the ripples of the flux or torque.
Okumus proposed a torque control strategy in which the band is controlled by a fuzzy controller through an applied voltage vector and the slope of the torque to maintain a constant switching frequency in all operating conditions. Through the proposed technique, the switching frequency of the inverter can be kept nearly constant [
13]. Siva et al. presented a direct torque-controlled IM drive system with a fuzzy variable structure controller (FVSC) and fuzzy state feedback controller (FSFC). The FVSC exhibited a slow response with noticeable overshoot. The ripples in the stator flux were lower in the FSFC compared with the PID and FVSC. The proposed controllers improved the performance and robustness of the drive system [
14]. In addition, the PI control (PIC) of the IM exhibited more current ripples, high torque and flux distortions, a poor transient performance due to sudden disturbances, and poor sensitivity to control gains. To improve the performance of the IM, PIC was replaced by type-2 fuzzy logic control (TP2FLC), which resulted in an excellent dynamic performance of the IM with less harmonic distortion in the current, torque, and flux [
15]. Dybkowski and Szabat presented an adaptive control structure while working with the online tuned neuro-fuzzy speed compensator. In the proposed fuzzy control system, a fuzzy controller and a fuzzy vector selection table were used to establish an appropriate voltage vector for achieving a high operating speed and stability [
16,
17].
In the PDTC algorithm, versatile and flexible control algorithms were developed for realizing electric motor drives with favorable performance characteristics [
5]. The conventional direct torque control (CDTC) of an IM was improved using artificial intelligence to control the motor speed with a field-programmable gate array (FPGA). Fuzzy logic was used to improve the effectiveness of the conventional PI controller when it changed with time and operating conditions. In addition, the digital implementation of the CDTC with a fuzzy speed controller was based on the FPGA, which was used to overcome the limitations of software solutions (e.g., digital signal processors and microcontrollers) [
18]. In this paper, we present an application-specific integrated circuit (ASIC) capable of fuzzy control and a PDTC for IM drives.
In this study, a fuzzy PDTC was fabricated using 0.18-µm 1P6M CMOS technology. Simulated and measured results were recorded at an operating frequency of 50 MHz and a supply voltage of 1.8 V. The remainder of this paper is organized as follows.
Section 2 details the proposed topology of the fuzzy PDTC ASIC, implemented with 10 blocks.
Section 3 presents the simulated and measured results.
Section 4 presents our conclusions.
2. Proposed Topology of Fuzzy PDTC ASIC
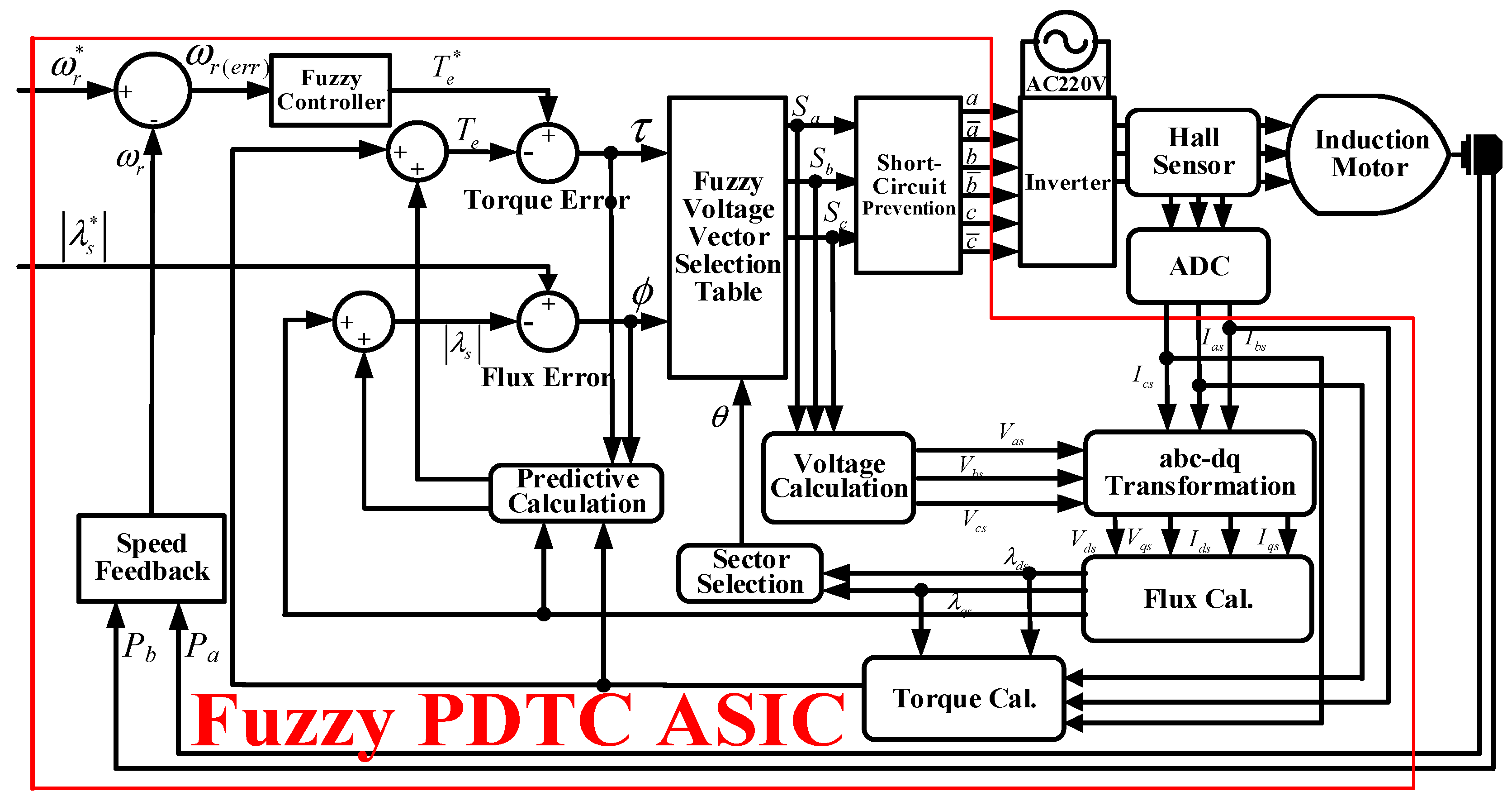
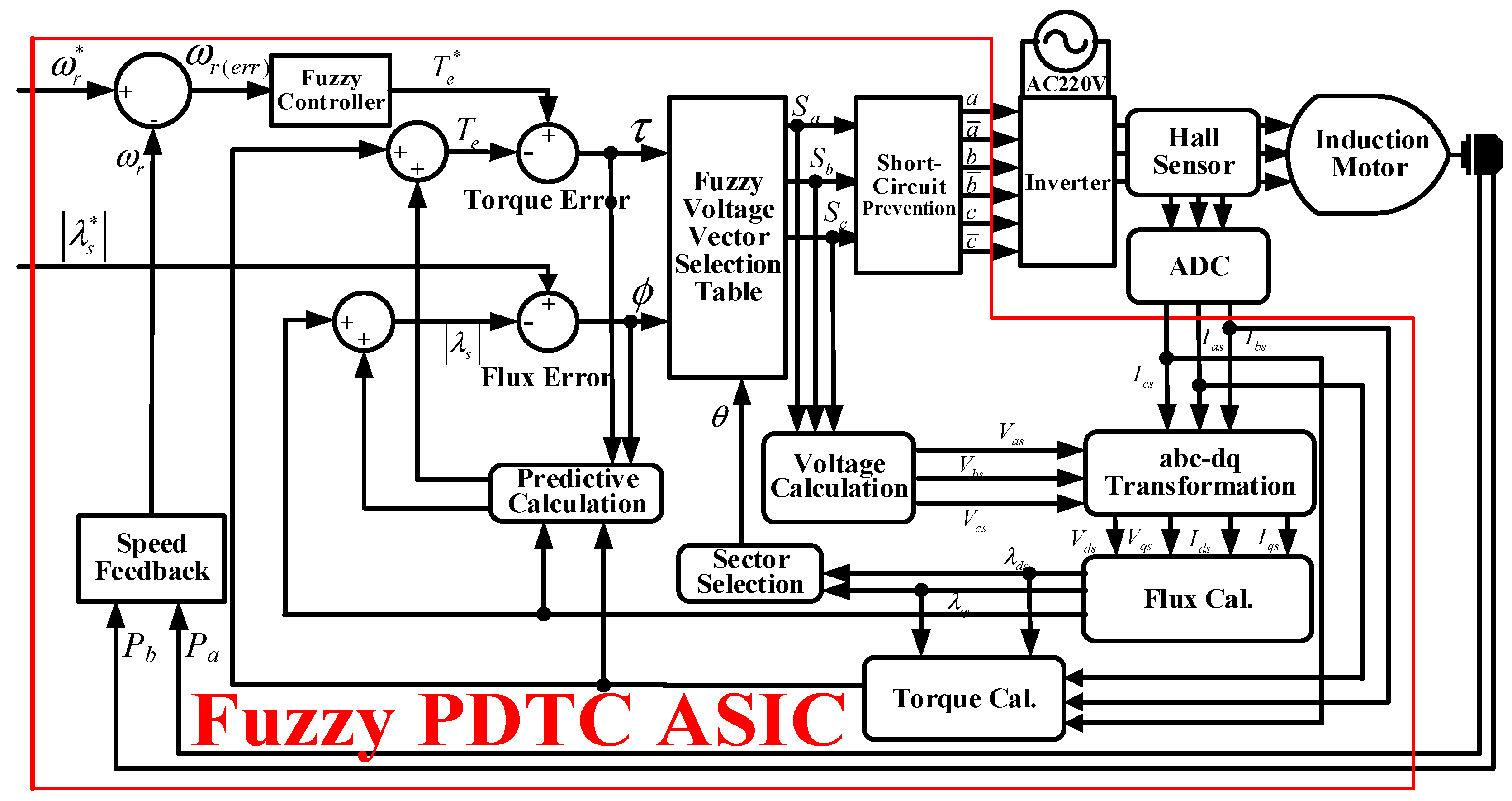
Figure 1 presents the block diagram of the modified fuzzy PDTC for an IM drive, which comprises a Hall sensor, an analog-to-digital converter, an abc–dq transformation unit, a flux calculator, a voltage calculator, a torque calculator, a speed calculator, an angle selector, a predictive calculator, a fuzzy controller, a fuzzy voltage vector selector, and a short-circuit preventer. All blocks were designed using the Verilog hardware description language (HDL) and verified using an FPGA board. After the digital chip was implemented using the synthesis tool, auto place, routed tool, and verification tool, an ASIC was fabricated using a 0.18-μm 1P6M CMOS process for a three-phase IM control system.
As shown in
Figure 1, the proposed fuzzy PDTC ASIC (red rectangle) comprises 10 blocks. In the design of these blocks, we focused on the voltage calculation, flux calculation, torque calculation, angle selection, modified predictive calculation, fuzzy control, fuzzy voltage vector selection, and short-circuit prevention.
2.1. Voltage Calculation
To calculate the voltage, an abc–dq transformation was performed to not only simplify the calculation process, but also accelerate the transformation. In general, the motor’s voltages were determined using three-phase switching states—
Sa,
Sb, and
Sc—and the DC voltage
Vdc of the inverter. The calculated three-phase output voltages, with respect to the central point,
Van,
Vbn, and
Vcn, can be expressed as follows:
and
For the motor stator, the calculated
Van,
Vbn, and
Vcn can be expressed as three-phase stator voltages—
Vsas,
Vsbs, and
Vscs—which can be transformed into the two-phase stator voltages,
Vsds and
Vsqs, by using the following equations:
and
Table 1 presents the related voltage parameters with respect to various switching states. In addition, a Hall sensor was used to detect the three-phase stator currents—
isas,
isbs, and
iscs—of the motor drive, and these currents were transformed into two-phase stator currents,
isds and
isqs, as follows:
If two stator currents,
isas and
isbs, are measured, the third parameter
iscs can be calculated on the basis of the following equation:
2.2. Flux and Torque Calculations
After the two-phase stator currents and stator voltages are obtained, the two-phase magnetic fluxes
φsds and
φsqs can be calculated using the winding resistance
Rs, which is the direct-current resistance in the single-phase winding of the stator. In other words, the magnetic fluxes in the
ds–
qs axis can be expressed as follows [
16]:
If R
s is small, Equation (8) can be simplified using the sampling time T as follows [
17]:
The magnetic torques
Te in the
ds–
qs axis can then be expressed as follows [
18]:
where
p is the pole number of the motor. Note that the digital multiplier is implemented with the Booth multiplication algorithm [
19], and the composite magnetic flux is completed with a square root operation, which is implemented in the shadow tree algorithm [
20].
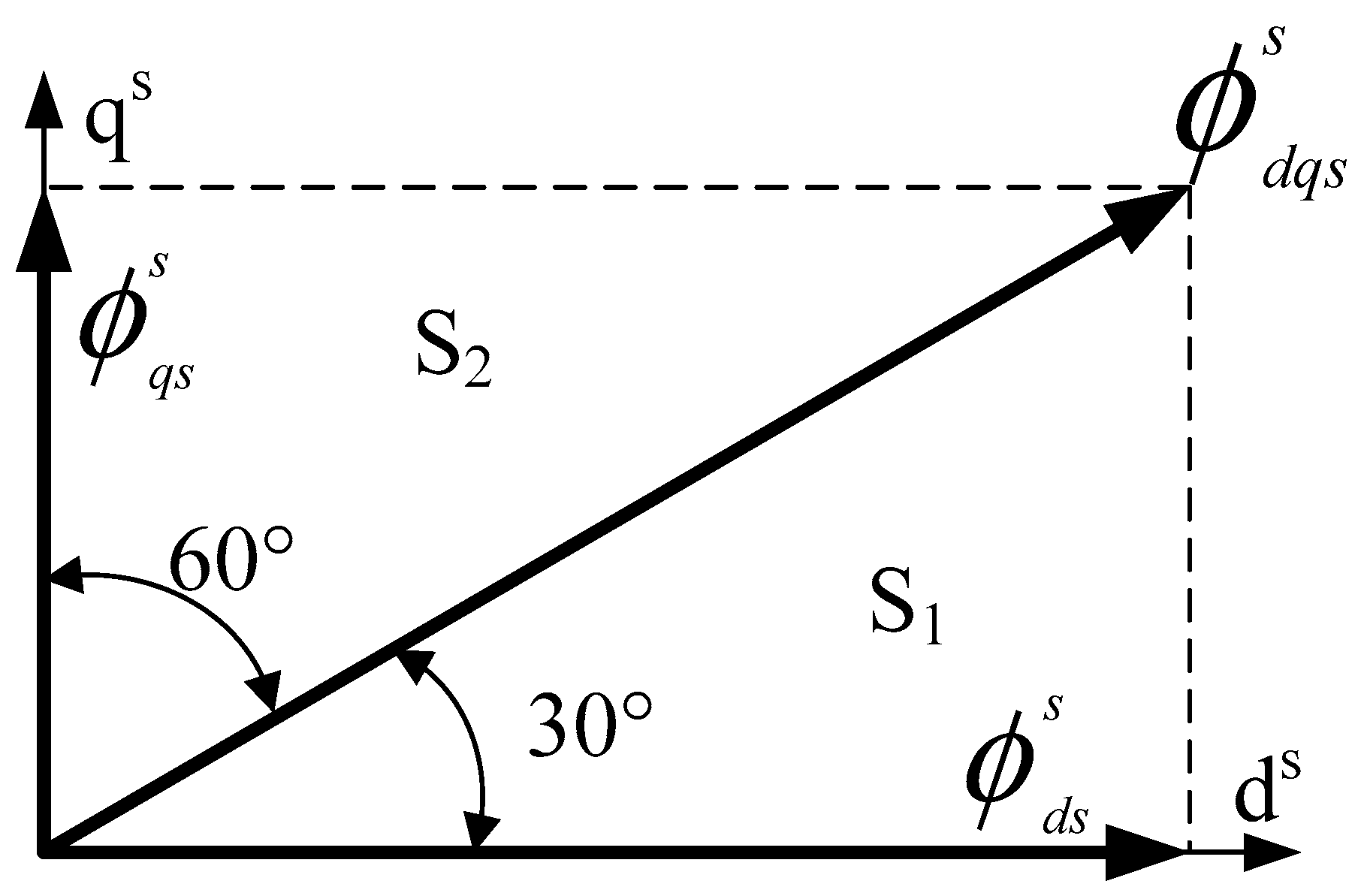
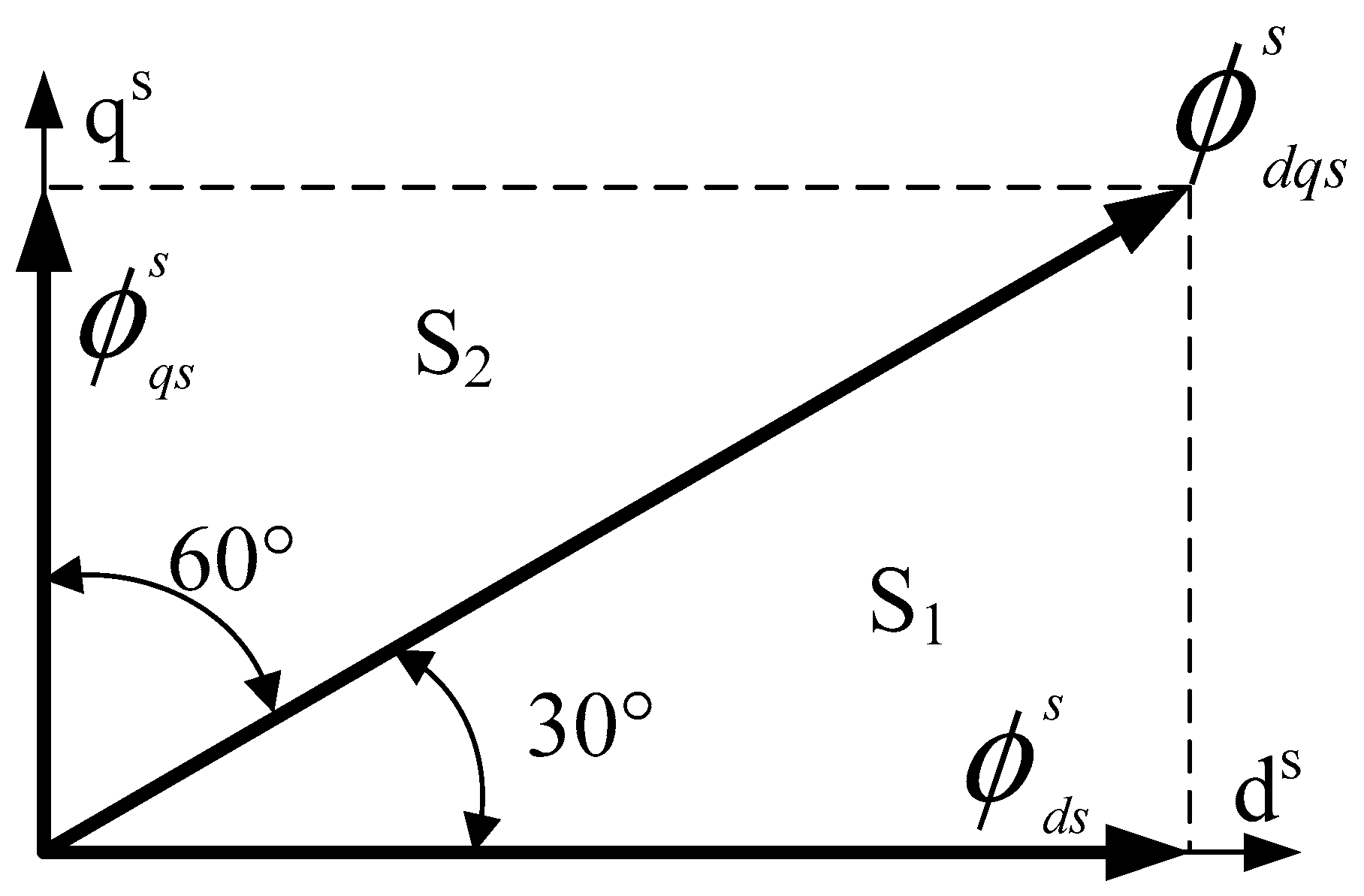
2.3. Angle Selection
The angle can be selected using the calculated two-phase stator fluxes and by determining the flux
φsdqs. In general, the voltage space vector can be divided into six sectors, with each sector including an angle of 60°. To simplify the analysis, the first quadrant of the coordinate plane is depicted in
Figure 2. Both
φsds and
φsqs are positive in this quadrant. In addition,
Figure 2 presents two sectors, S
1 and S
2. The angle of the first sector, S
1, extends from 0° to 30°, whereas that of the second sector, S
2, extends from 30° to 90°. In trigonometry, a relational equation is expressed as follows:
Dividing |
φsqs(
t)| by |
φsds(
t)| gives the following:
When the two fluxes
φsds(
t) and
φsqs(
t) are positive and
is negative, we select the first sector S
1, whereas the output is the second sector S
2 because the two fluxes
φsds(
t) and
φsqs(
t) are positive and
is positive. The output is 1 if the value of
φsds(
t),
φsqs(
t), or
is positive and is 0 otherwise.
Table 2 is the sector selection table for the proposed fuzzy PDTC. The output sector can be easily selected using this table.
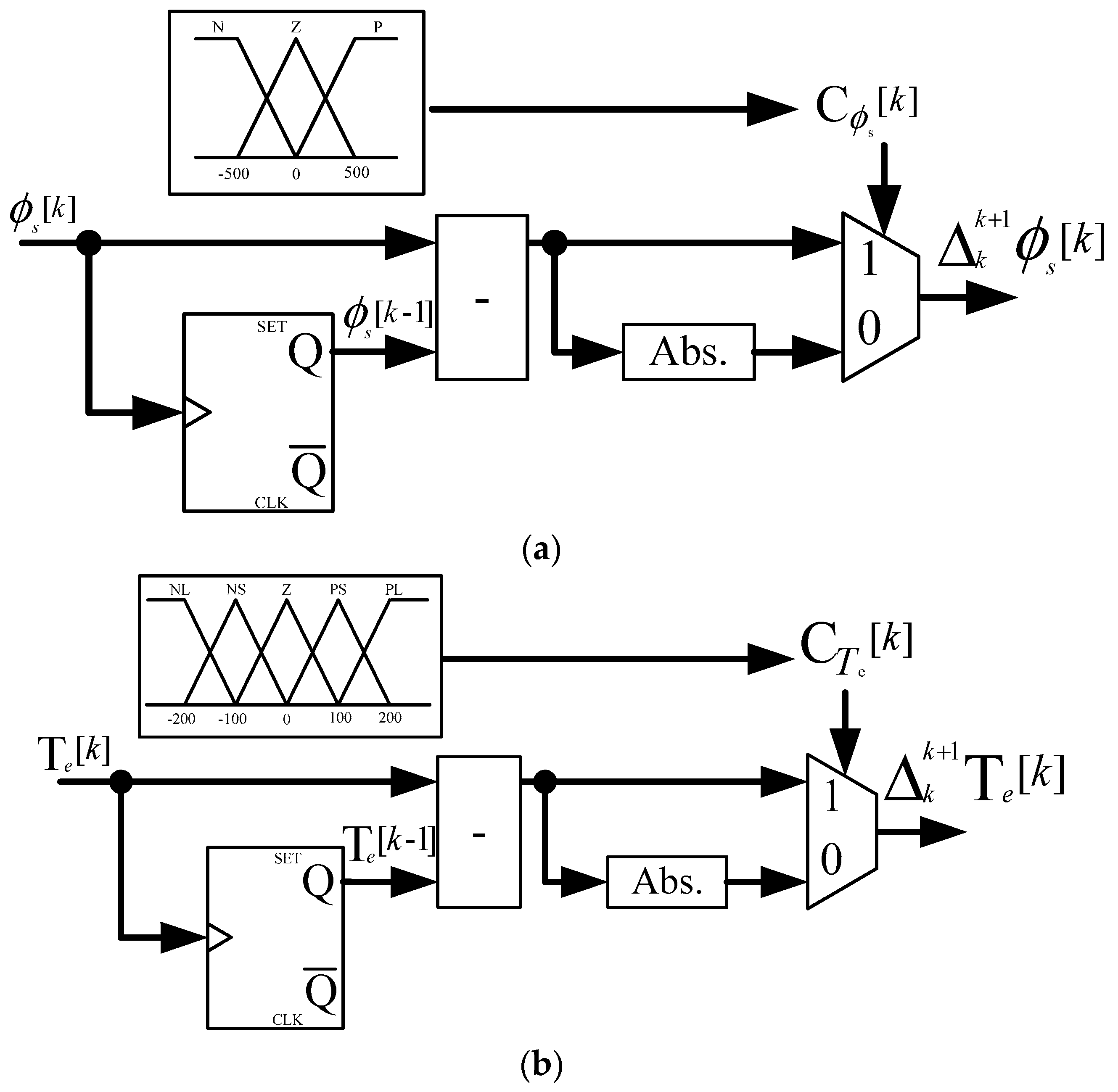
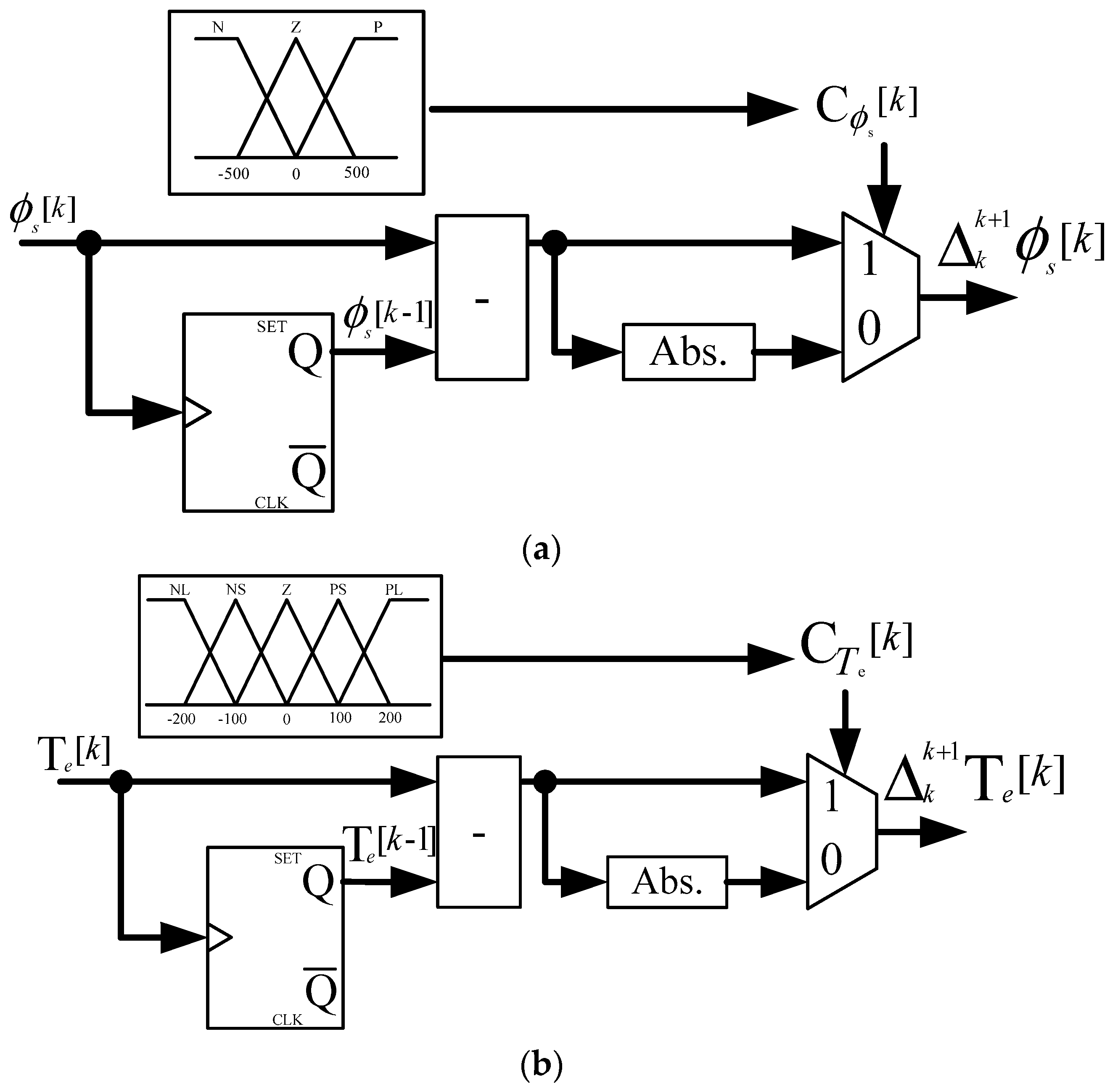
2.4. Modified Predictive Calculation
Figure 3 presents the modified compensation circuits of the present magnetic flux of the stator,
φs[
k], and the present torque of the motor,
Te[
k]. As shown in
Figure 3a, the delay (
z−1) block is completed using an edge-triggered D flipflop (DFF) circuit, the subtraction block (denoted by the symbol “−” in the figure) is used to obtain the deviation between the present flux
φs[
k] and the previous flux
φs[
k − 1], the absolute value block (Abs.) provides the magnitude of the deviation, and the multiplexer determines the output ∆
kk + 1φs[
k] according to the control signal
Cφs[
k].
Figure 3b presents the same function, but with the present torque
Te[
k] and previous torque
Te[
k − 1]. Unlike the conventional DTC, the predictive compensation circuit used in the current study can reduce the ripples in the flux and torque. Moreover, the proposed PDTC not only has the advantages of the conventional DTC, but also shortens the delay time and thus exhibits a high performance.
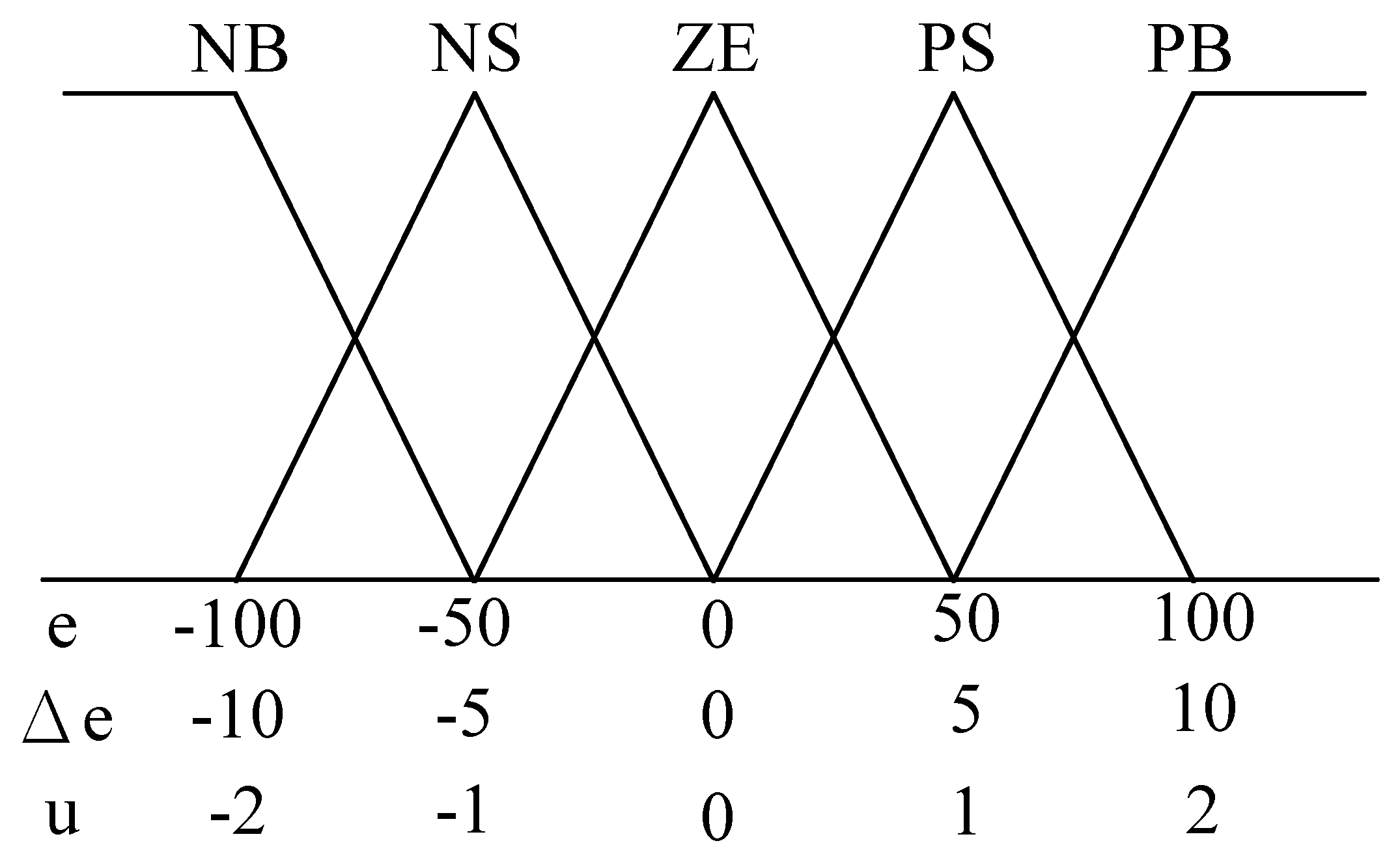
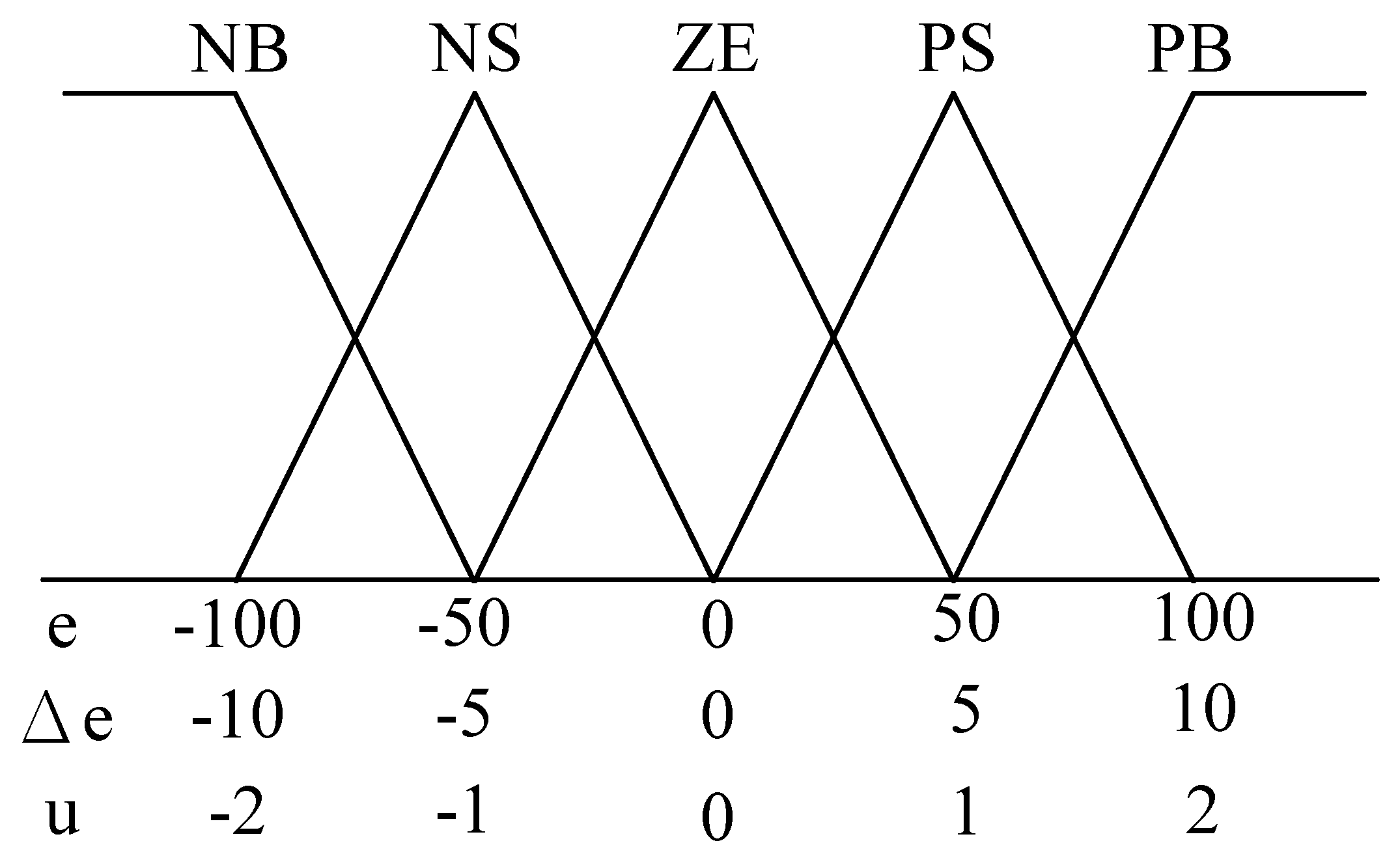
2.5. Fuzzy Controller
Figure 4 presents the membership functions of two input variables and an output variable. According to the analysis of the step response in a DTC system, three fields of the fuzzy variables can be defined as follows. The field of the motor speed feedback error
e is [−100, 100], that of the speed error variation
∆e is [−10, 10], and that of the torque value
u is [−2, 2]. The fuzzy subsets are {NB, NS, ZE, PS, PB} [
3]. The abbreviations NB, NS, ZE, PS, and PB represent a negative big error, negative small error, zero error, positive small error, and positive big error, respectively [
16].
Each rule of the fuzzy controller can be described using
e,
∆e, and
u. As shown in
Table 3, if
e =
NB and
∆e =
NB, then
u =
PB. A total of 25 rules are presented for the two input variables. The fuzzy control rules are presented in
Table 3.
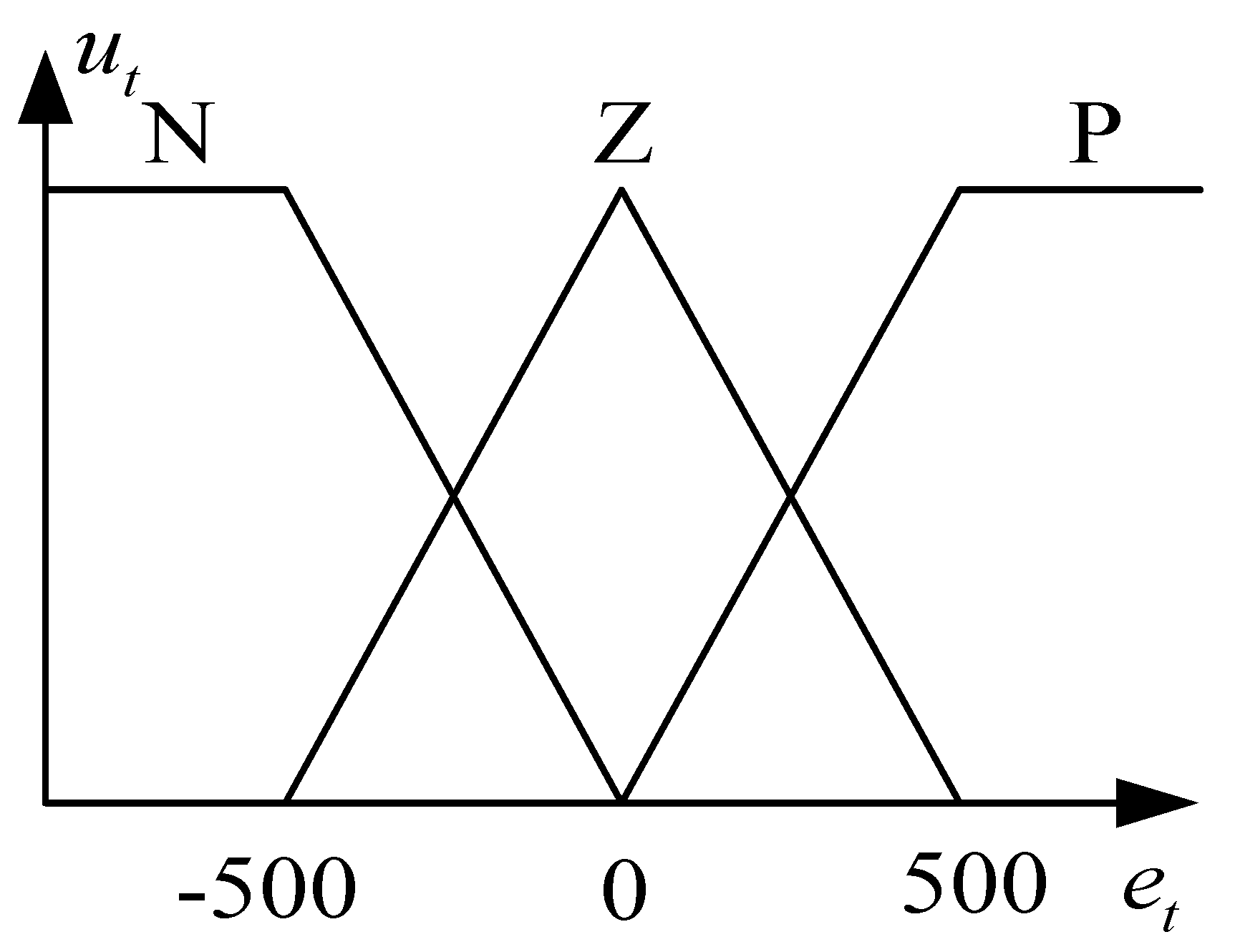
2.6. Fuzzy Voltage Vector Selector
To enhance the performance of the DTC system, the typical voltage vector selection table was modified. In the modified table, the input variables were the error in stator flux, error in the torque, and stator angle, and the output variable was the switching state selector.
Figure 5 presents the membership function of the flux errors with three fuzzy subsets {N, Z, P}. The letters N, Z, and P represent a negative flux error, zero flux error, and positive flux error, respectively.
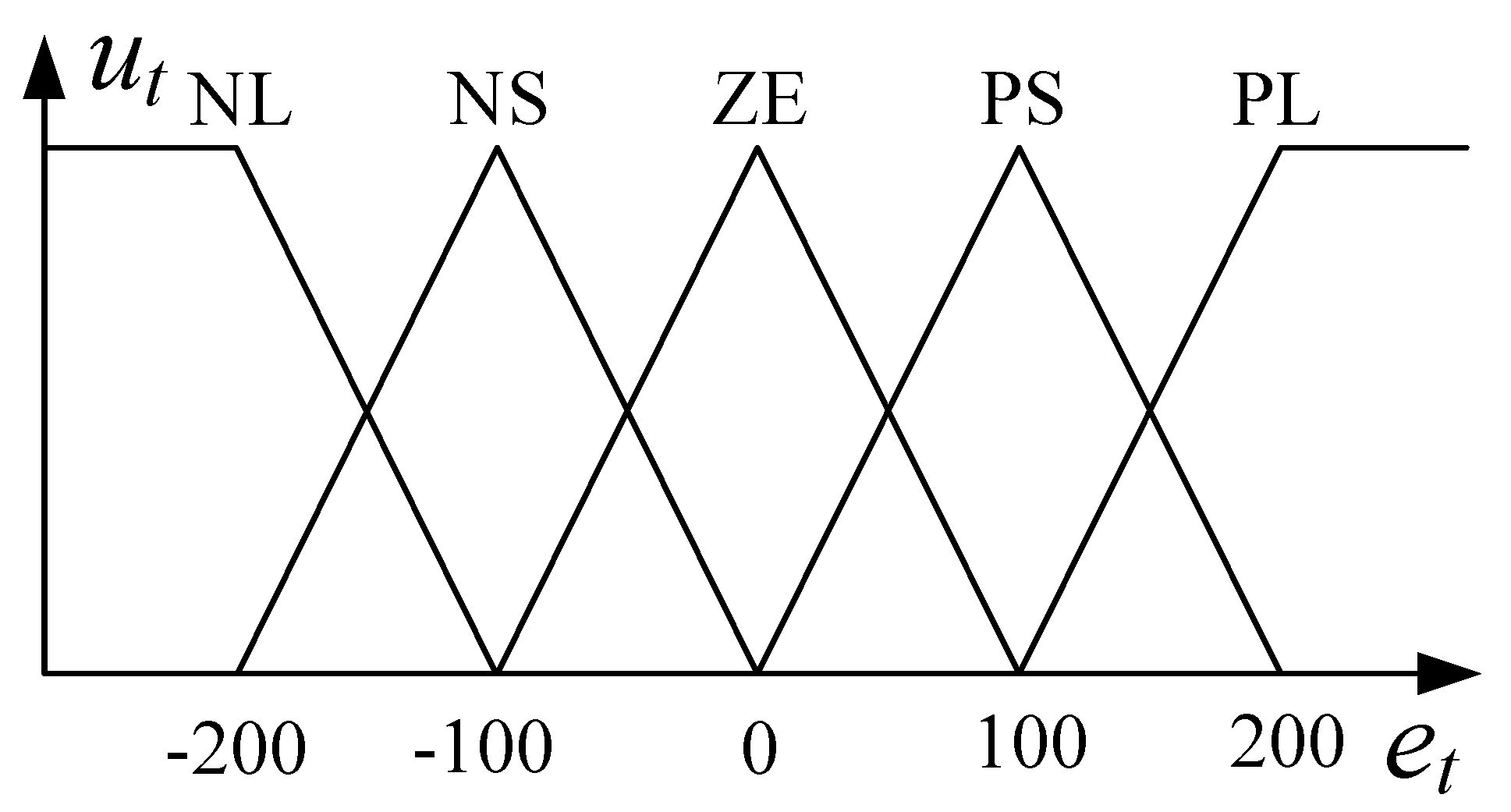
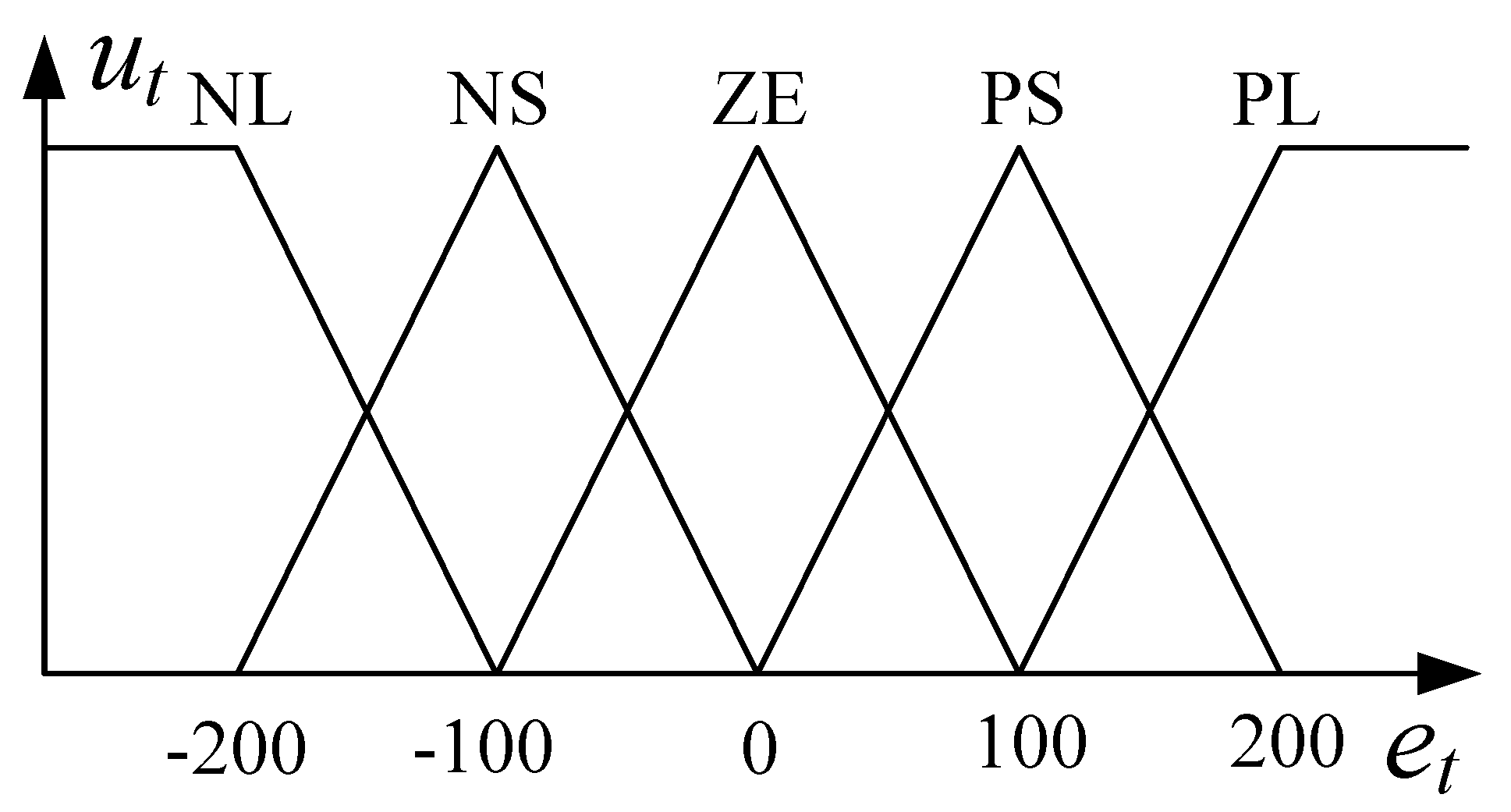
Figure 6 presents the membership function of the torque error T with five fuzzy subsets {NL, NS, ZE, PS, PL}. The abbreviations NL, NS, ZE, PS, and PL represent a negative large error, negative small error, zero error, positive small error, and positive large error, respectively.
ut is a fuzzy membership function and
et is a fuzzy error.
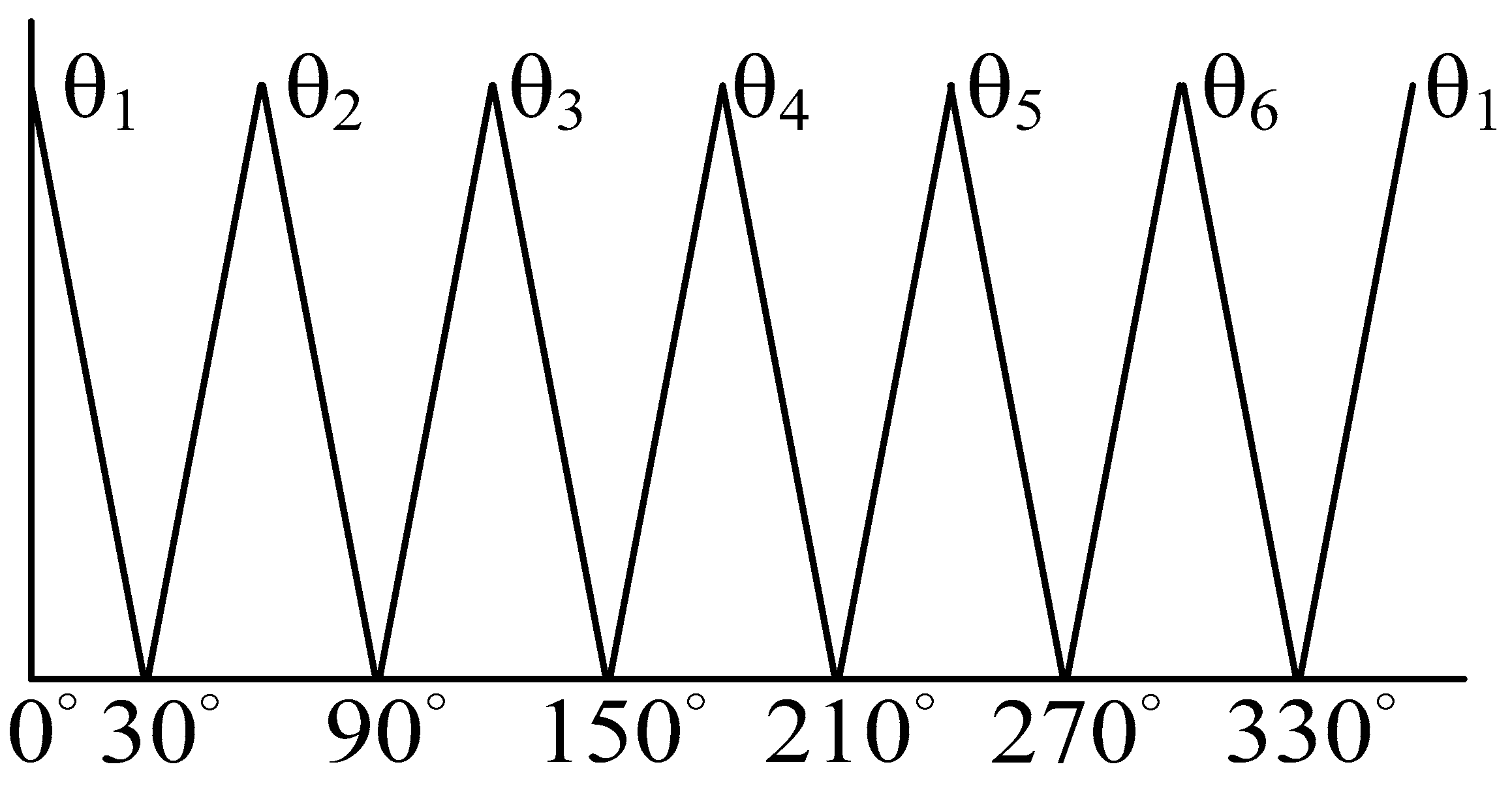
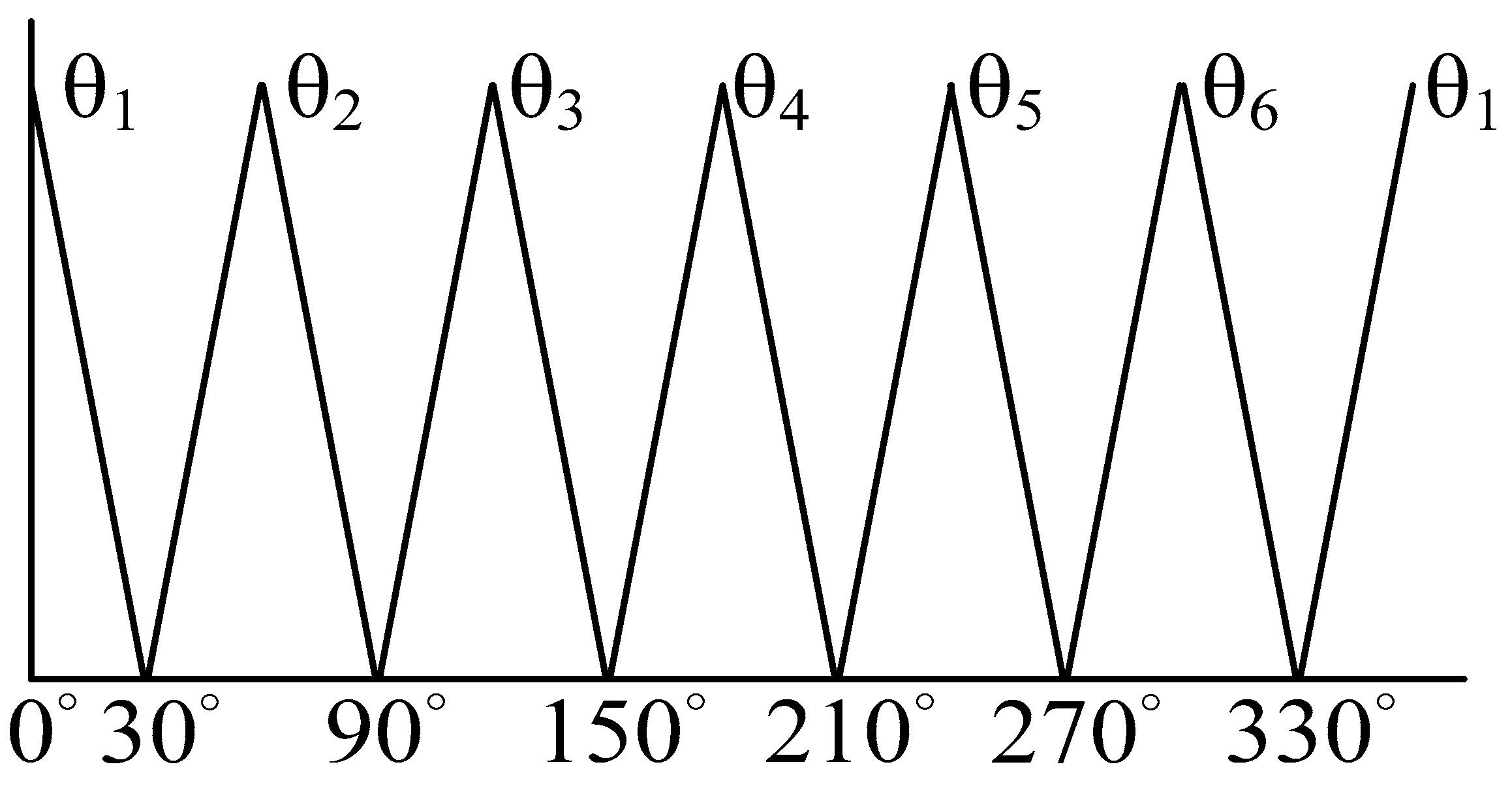
Figure 7 presents the membership function of the stator angle with six angular intervals, {θ
1, θ
2, θ
3, θ
4, θ
5, θ
6}. The angular intervals
θ1,
θ2,
θ3,
θ4,
θ5, and
θ6 extend from −29° to 30°, 31° to 90°, 91° to 150°, 151° to 210°, 211° to 270°, and 271° to 330°, respectively [
21].
Table 4 is the fuzzy voltage vector selection table for the proposed PDTC with a fuzzy controller.
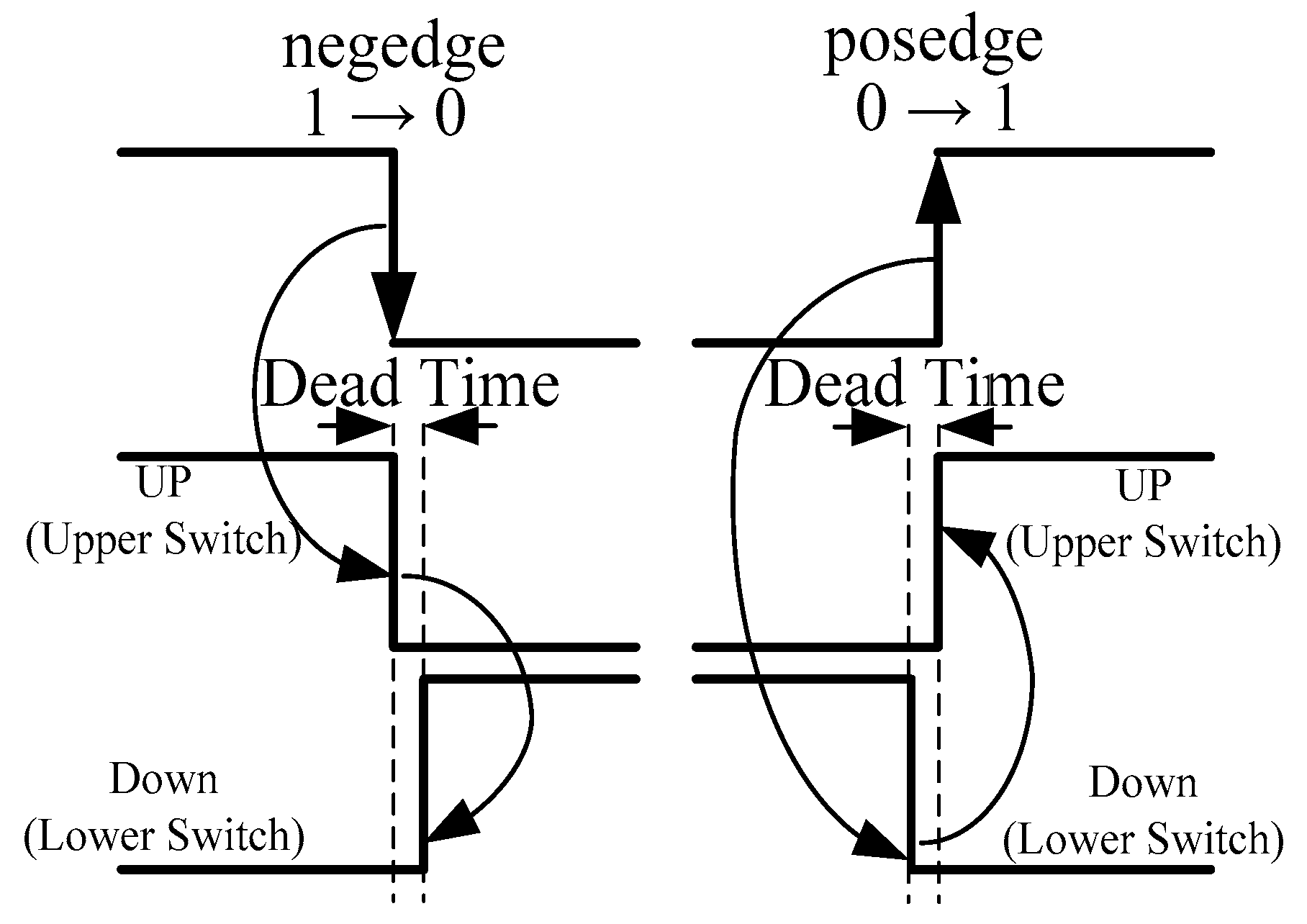
2.7. Short-Circuit Prevention
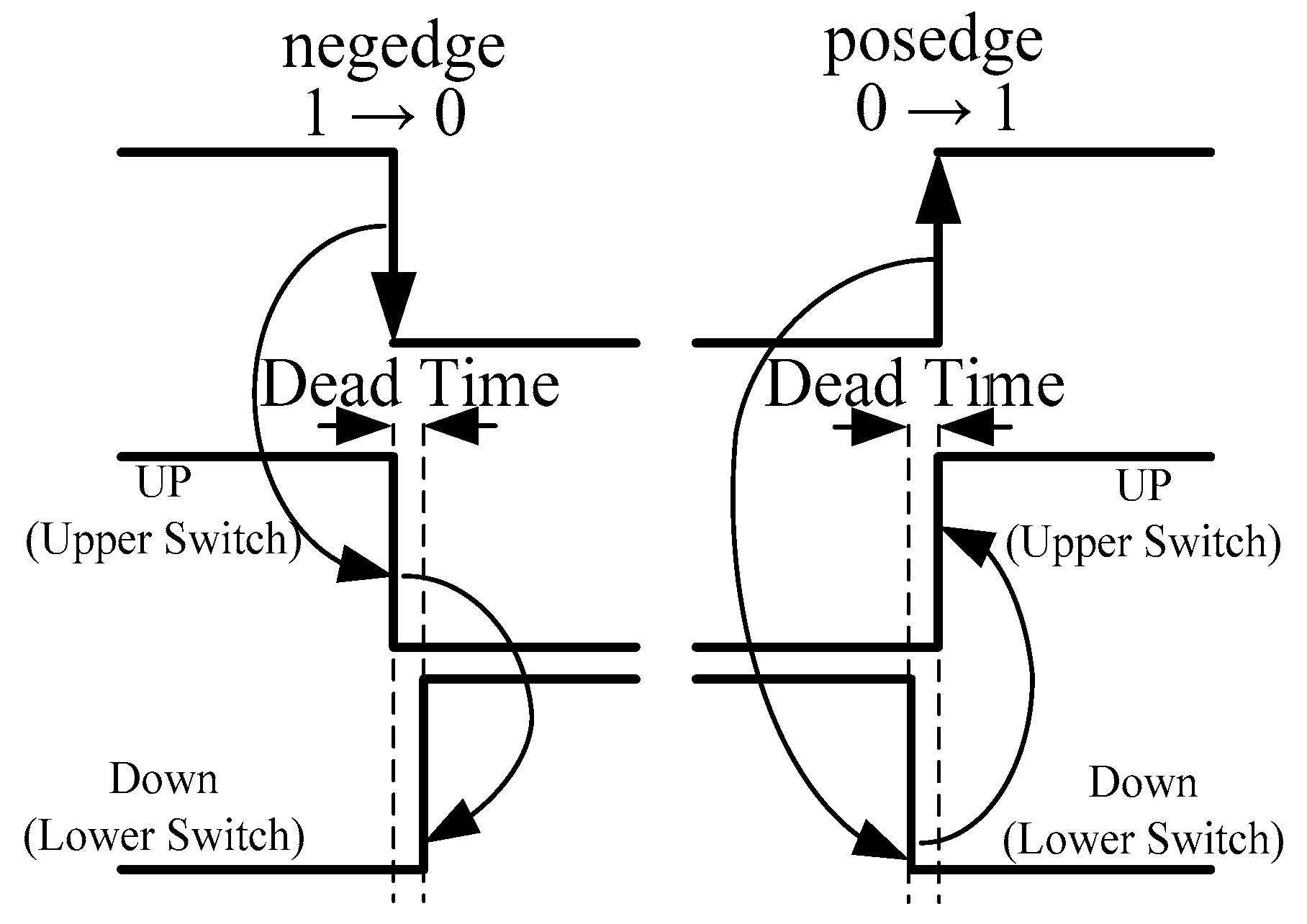
To prevent a short circuit in the inverter, dead time is used to protect the inverter from burning the motor control system.
Figure 8 presents the proposed short-circuit prevention scheme, which comprises two states, 1→0 and 0→1, in the control signal. First, the “Up” signal is low (0) from high (1) when the control signal turns off (1→0); and the “Down” signal is high (1) from low (0) when the dead time (∆T) is up. Second, the “Down” signal is low (0) from high (1) when the control signal turns on (0→1); and the “Up” signal is high (1) from low (0) when the dead time (∆T) is up. The advantage of the proposed short-circuit prevention method is that it helps to easily adjust the dead-time interval (∆T) according to the specifications of the motor control system.
3. Simulation and Measurement Results
The proposed fuzzy PDTC was implemented using Verilog HDL, and ModelSim software was used to simulate and verify the operation of the designed hardware circuit.
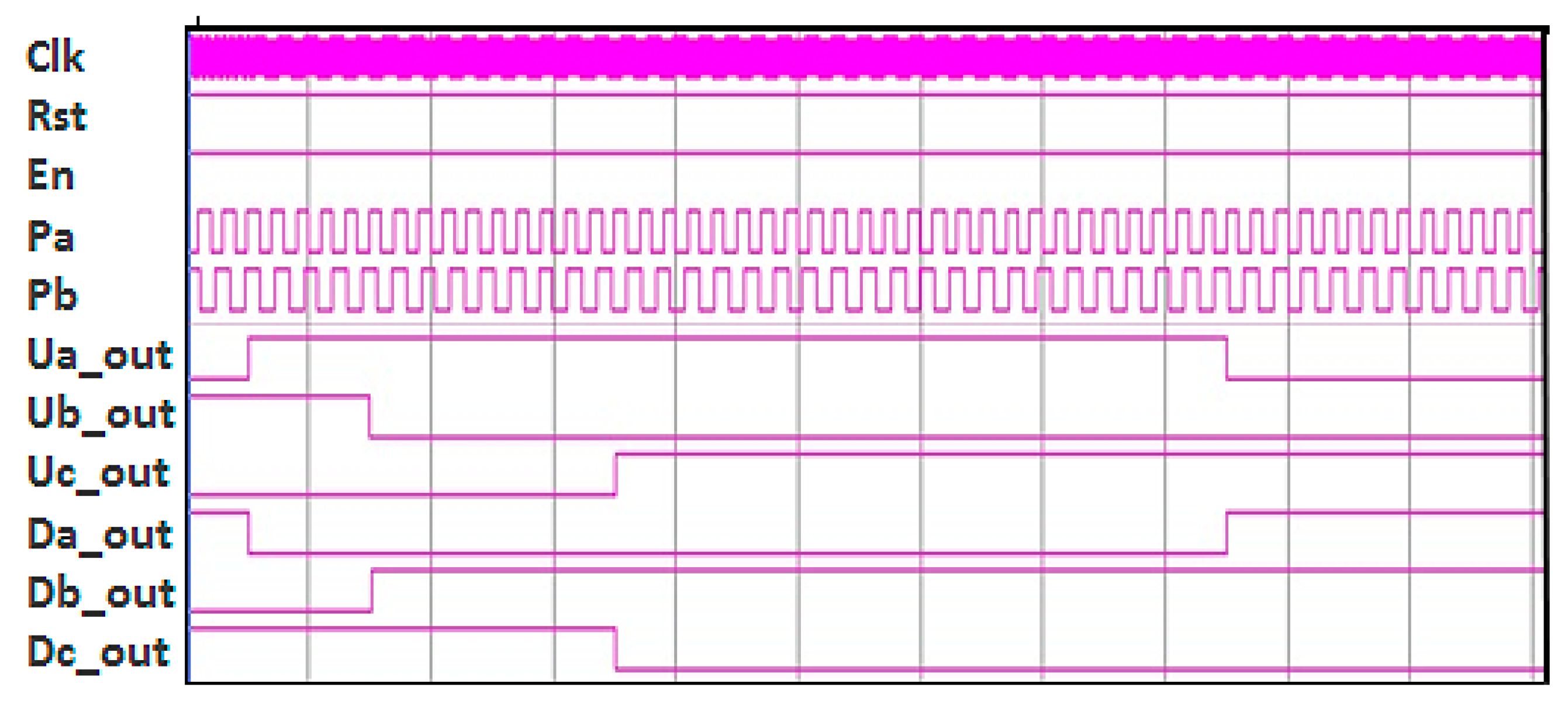
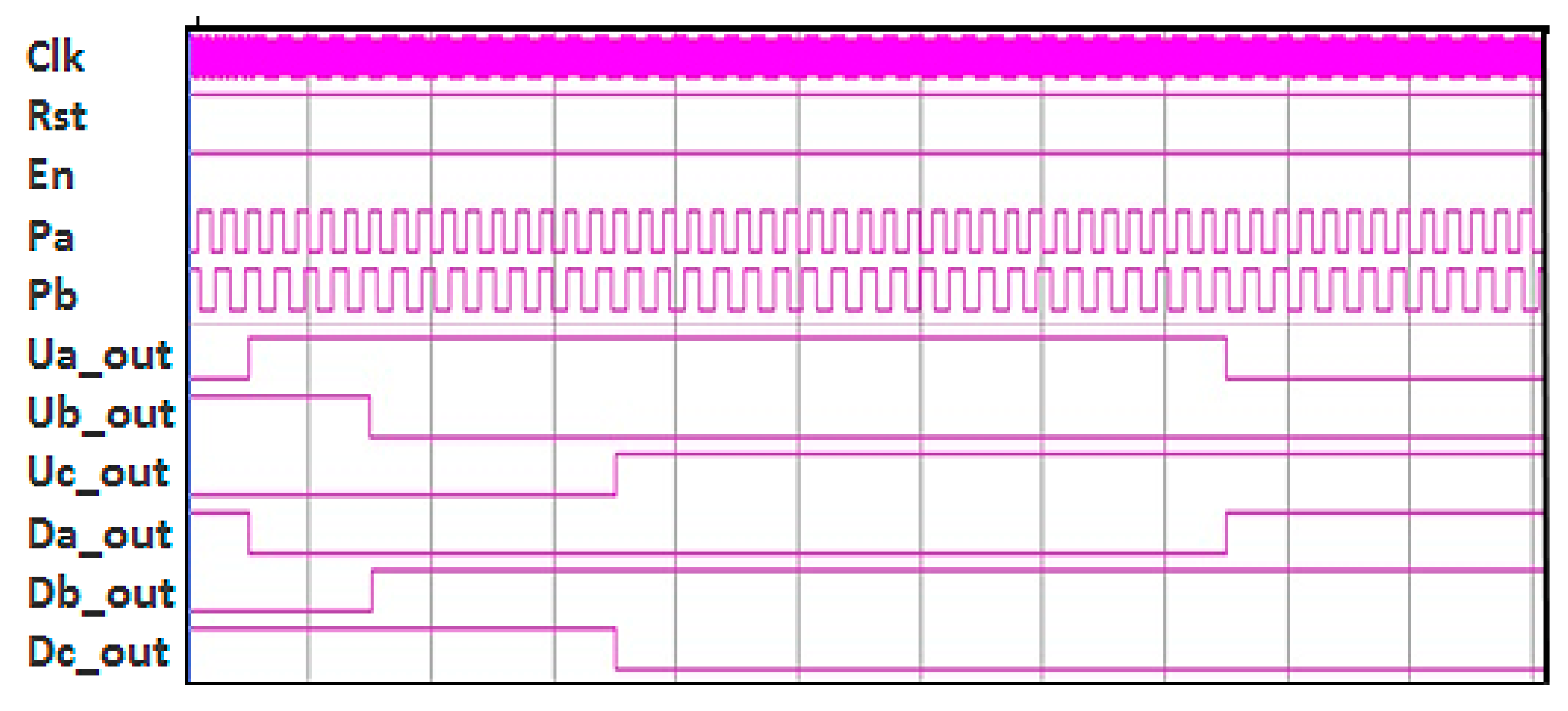
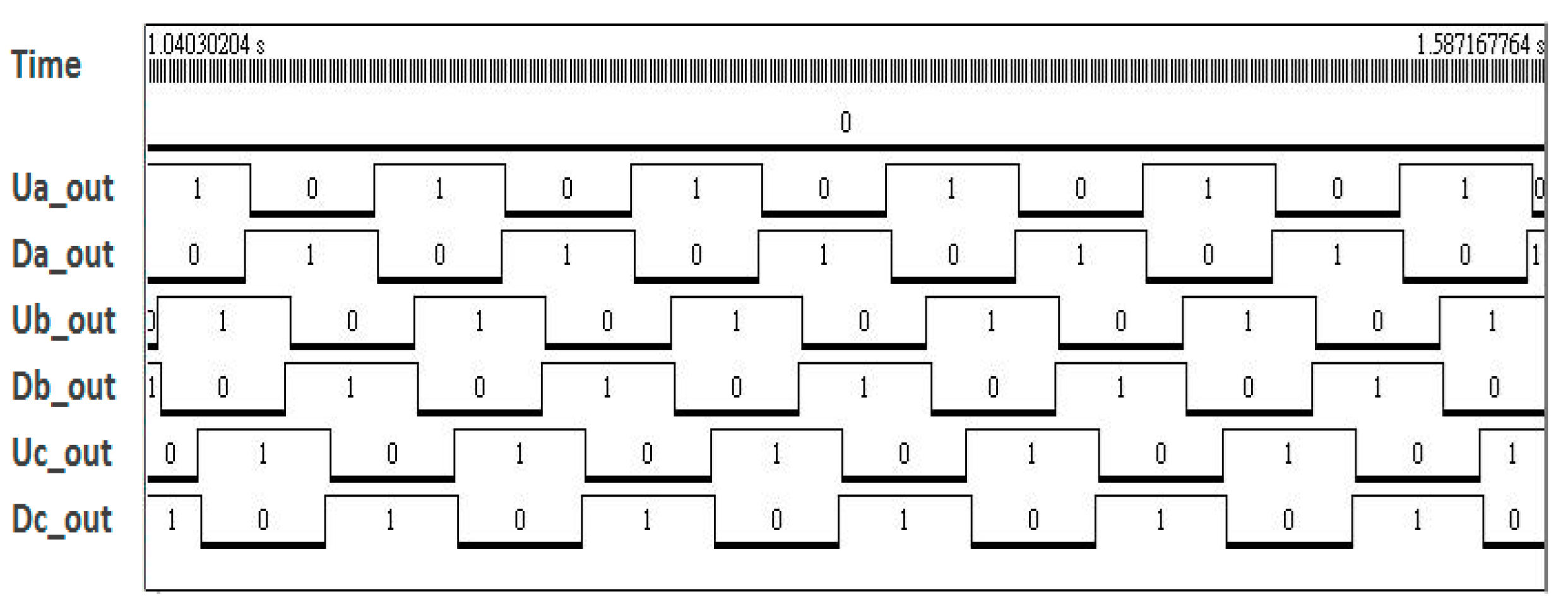
Figure 9 presents the simulation results for the six arms feeding the inverter. In this figure,
Pa and
Pb are the feedback signals of the speed encoder; the output signals
Ua_out,
Ub_out, and
Uc_out are the output waveforms of the upper arms for the
U-,
V-, and
W phases, respectively; and the output signals
Da_out,
Db_out, and
Dc_out represent the output waveforms of the lower arms for the
U-,
V-, and
W phases, respectively. In other words, three complementary switches,
Ua_out and
Da_out,
Ub_out and
Db_out, and
Uc_out and
Dc_out, were simulated to verify that the output waveforms of both the upper and lower arms worked as intended.
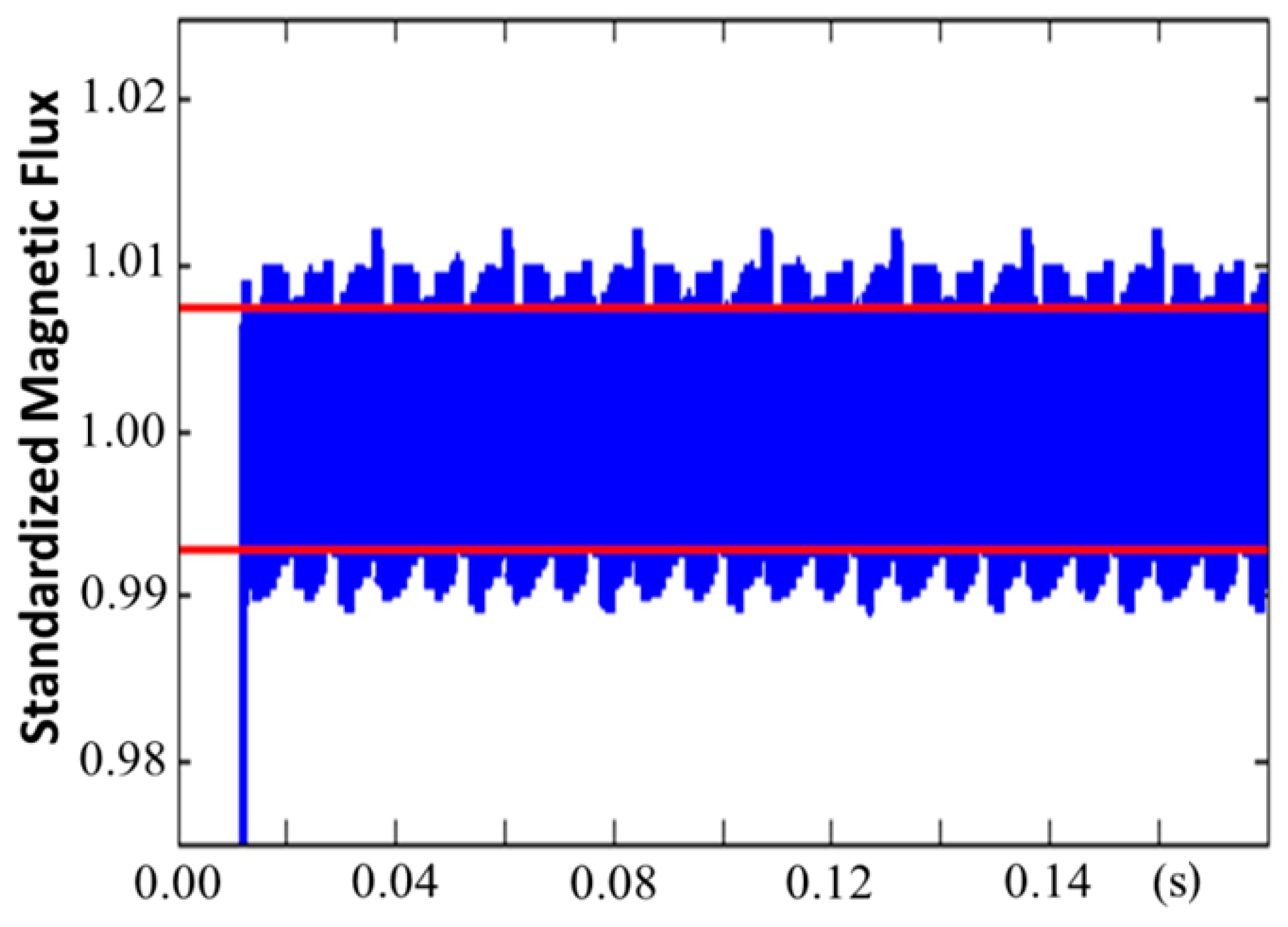
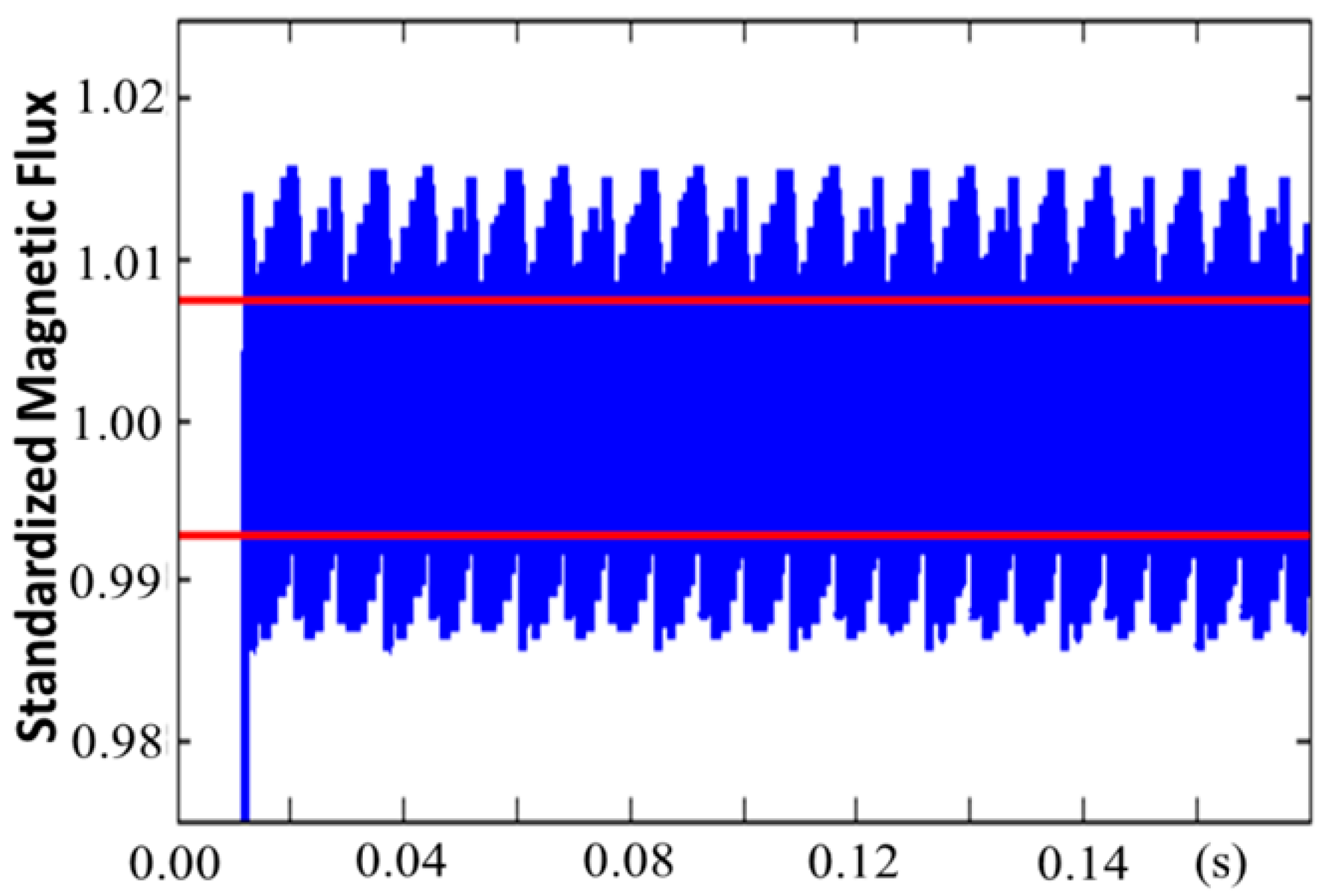
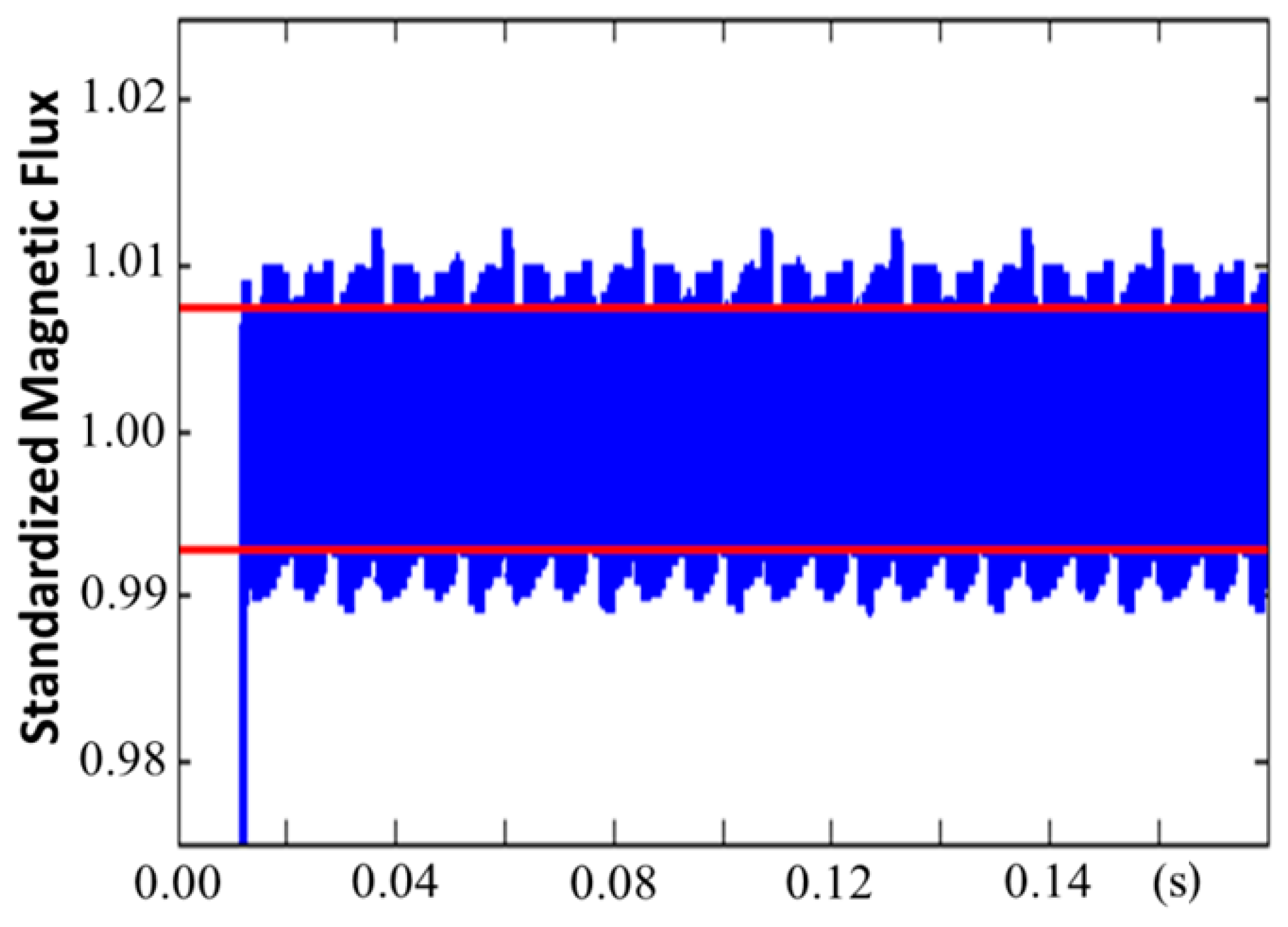
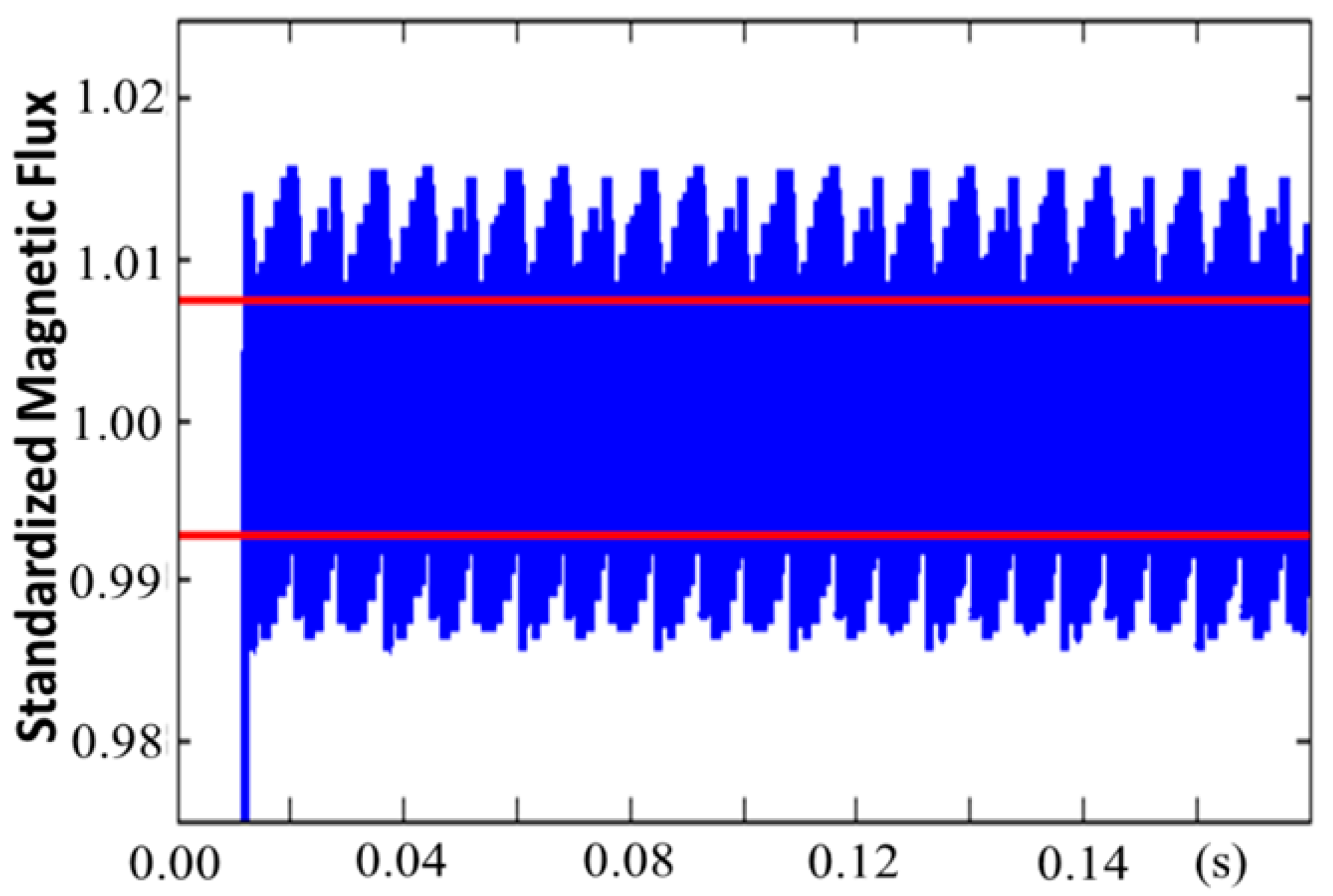
Figure 10 presents the composite magnetic flux of the proposed fuzzy PDTC, and
Figure 11 presents the composite magnetic flux of a conventional DTC. A comparison between
Figure 10 and
Figure 11 clearly reveals that the proposed architecture operated with smaller ripples. The performance of the proposed PDTC was superior to that of the conventional DTC [
22].
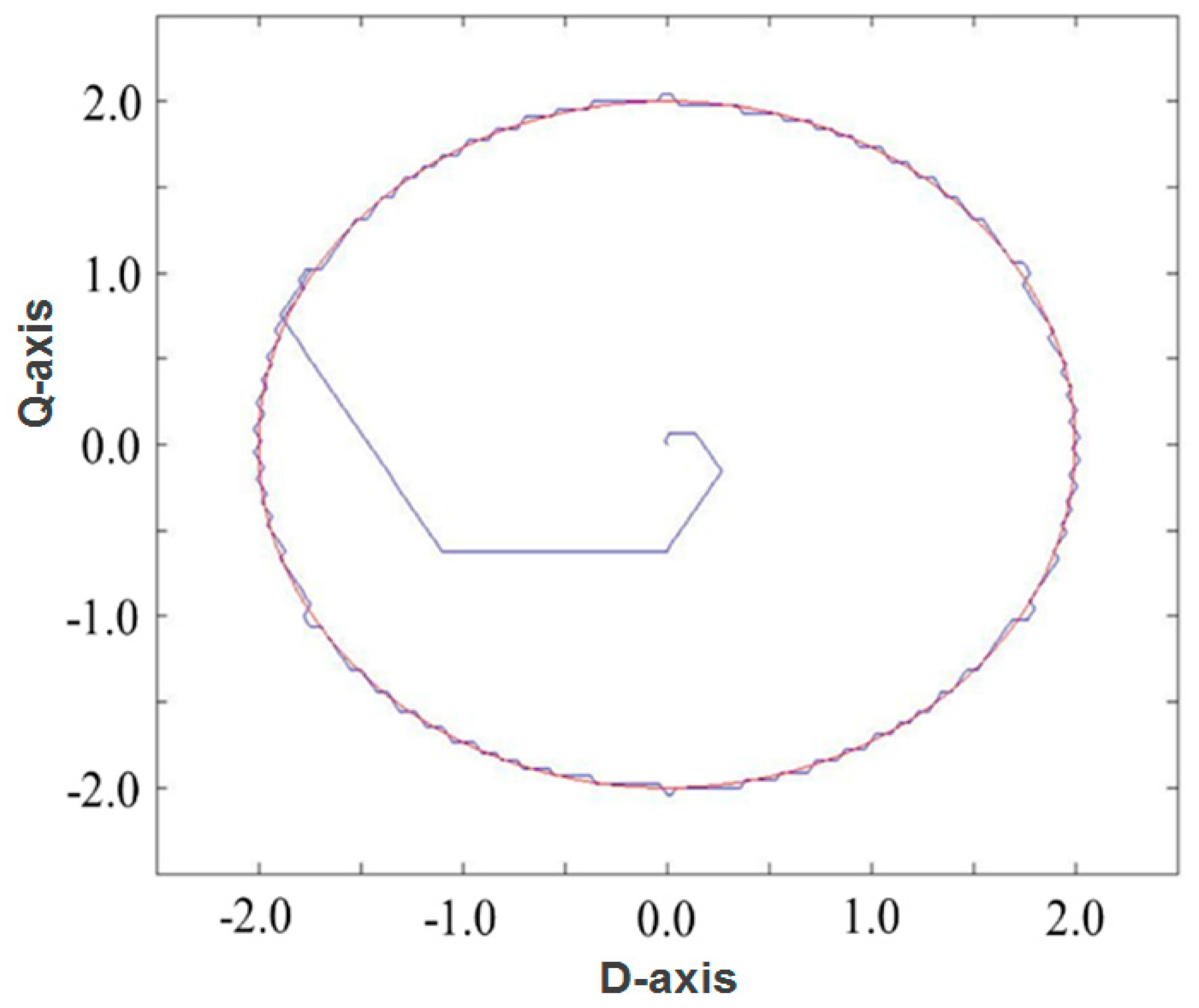
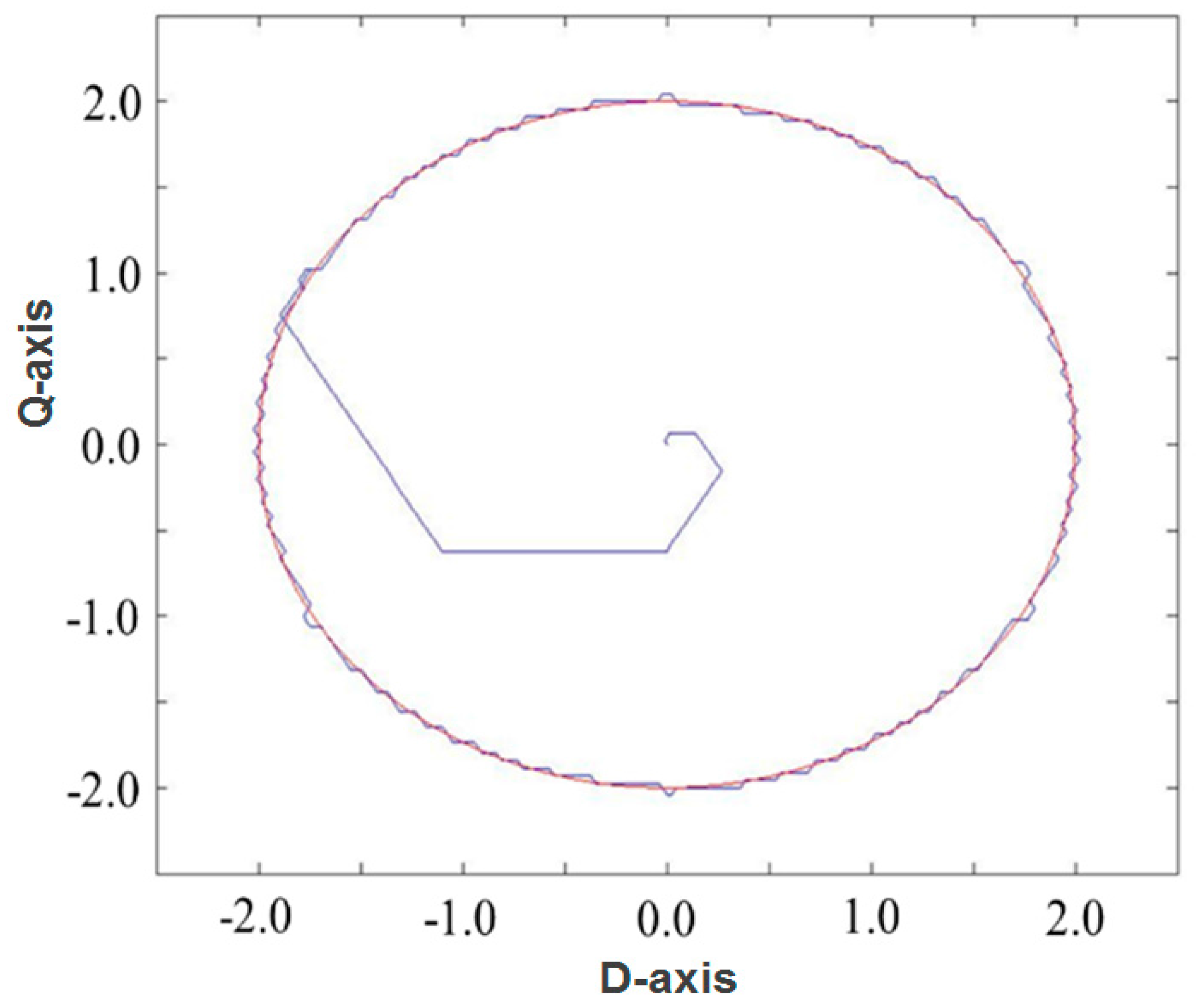
Figure 12 presents the locus of the stator flux in the proposed fuzzy PDTC, which was superior to that in [
23].
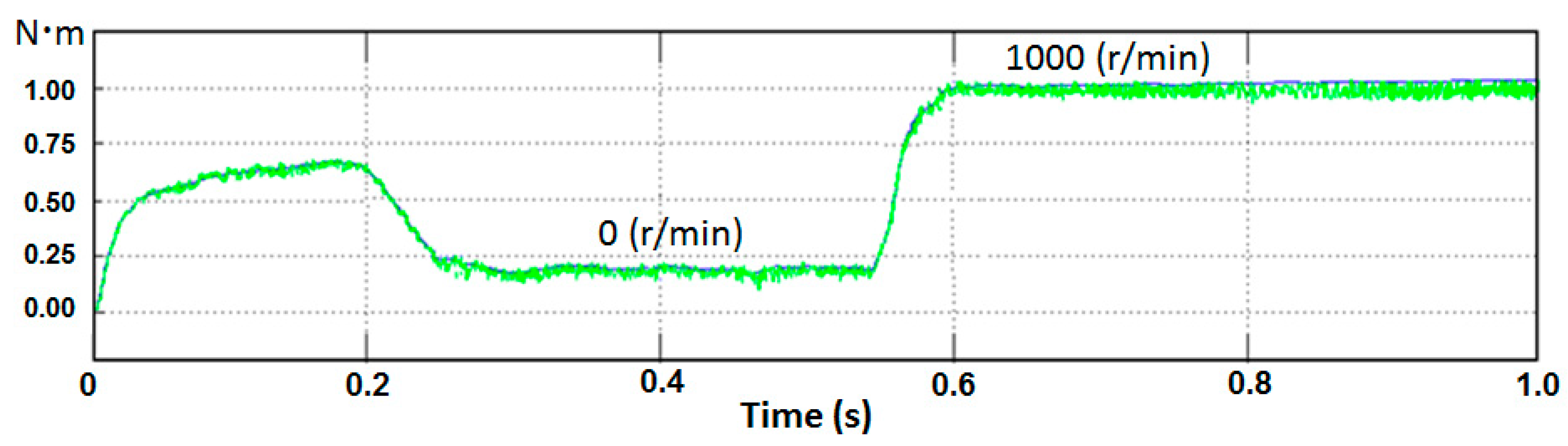
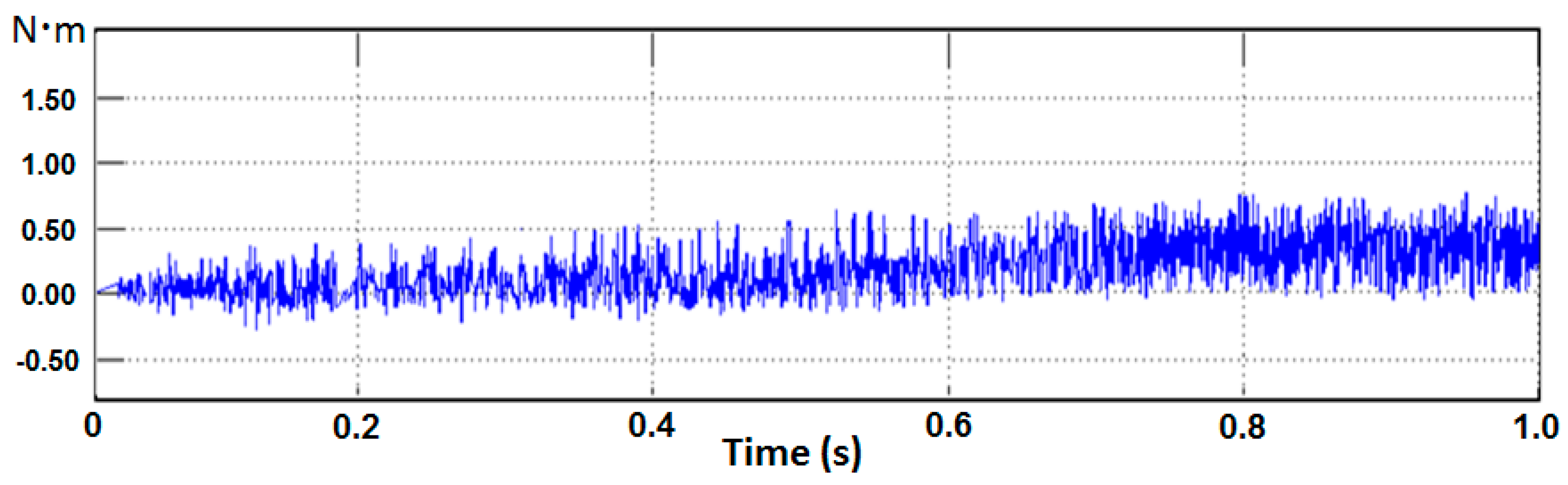
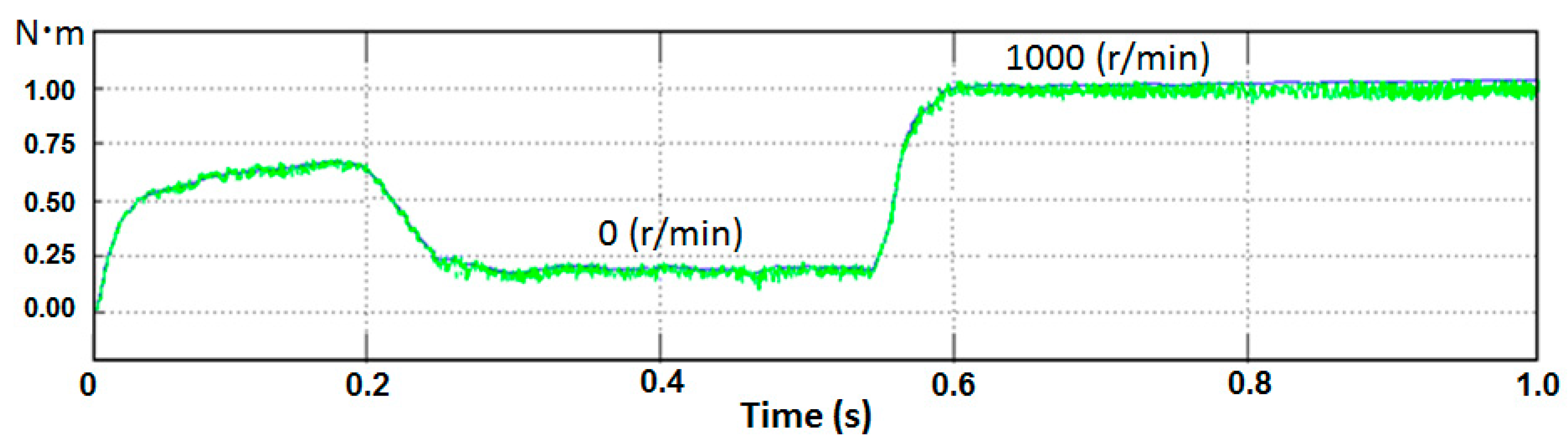
Figure 13 presents the simulated electromagnetic torque of the proposed fuzzy PDTC with respect to the change of speed from 0 to 1000 r/min in 1 s, which operated with small ripples, as shown in
Figure 14. In comparison to [
24], the proposed fuzzy PDTC performed smoothly by reducing the ripples generated in the indirect matrix converter. The ripples of the fuzzy controller occurred irrespective of the sampling frequency, whereas those of the hysteresis controller were dependent on the sampling frequency. Furthermore, a fuzzy voltage vector selection table (
Table 4) was used to not only rapidly determine the six output waveforms, but also to protect the inverter from burning the motor control system with dead time.
An FPGA development board (Altera DE2-70) was used to verify the output waveforms of the six arms.
Figure 15 presents the measured platform, which included an FPGA card, a switching board, an inverter, and an AC motor. The switching board was used for sensing the feedback signal and for accelerating the response between the FPGA card and inverter.
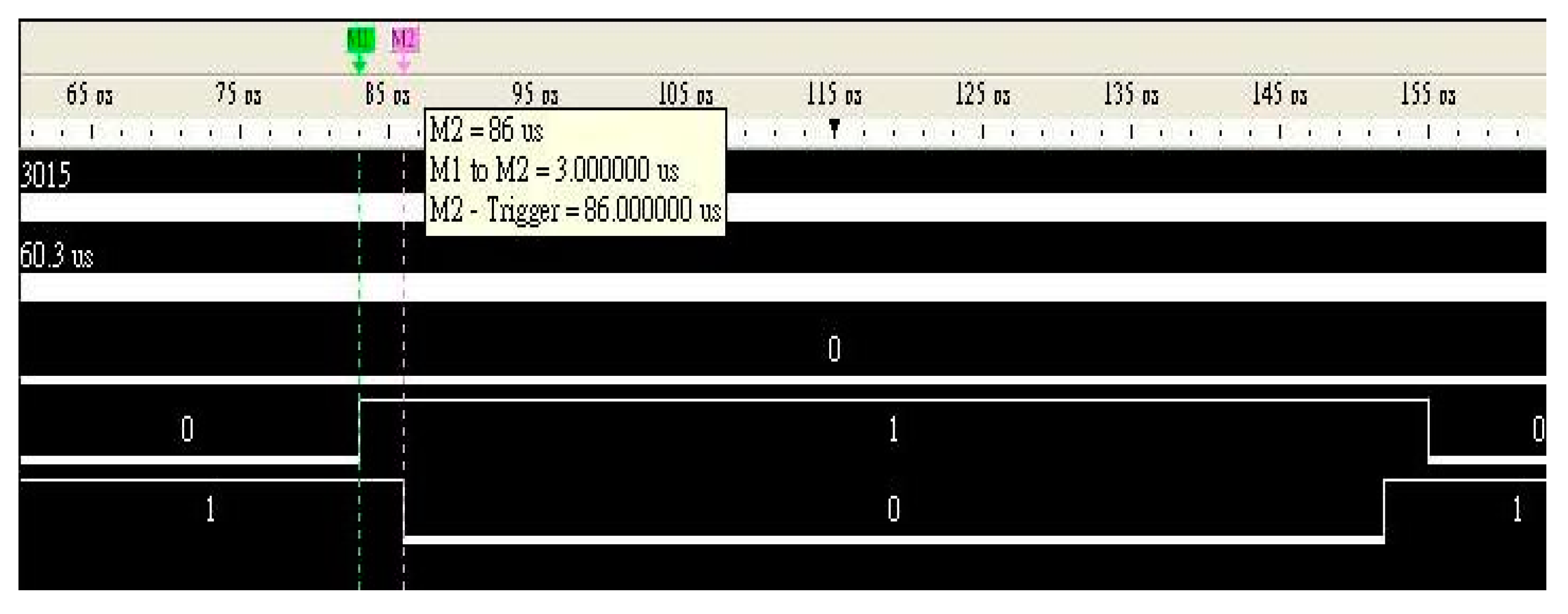
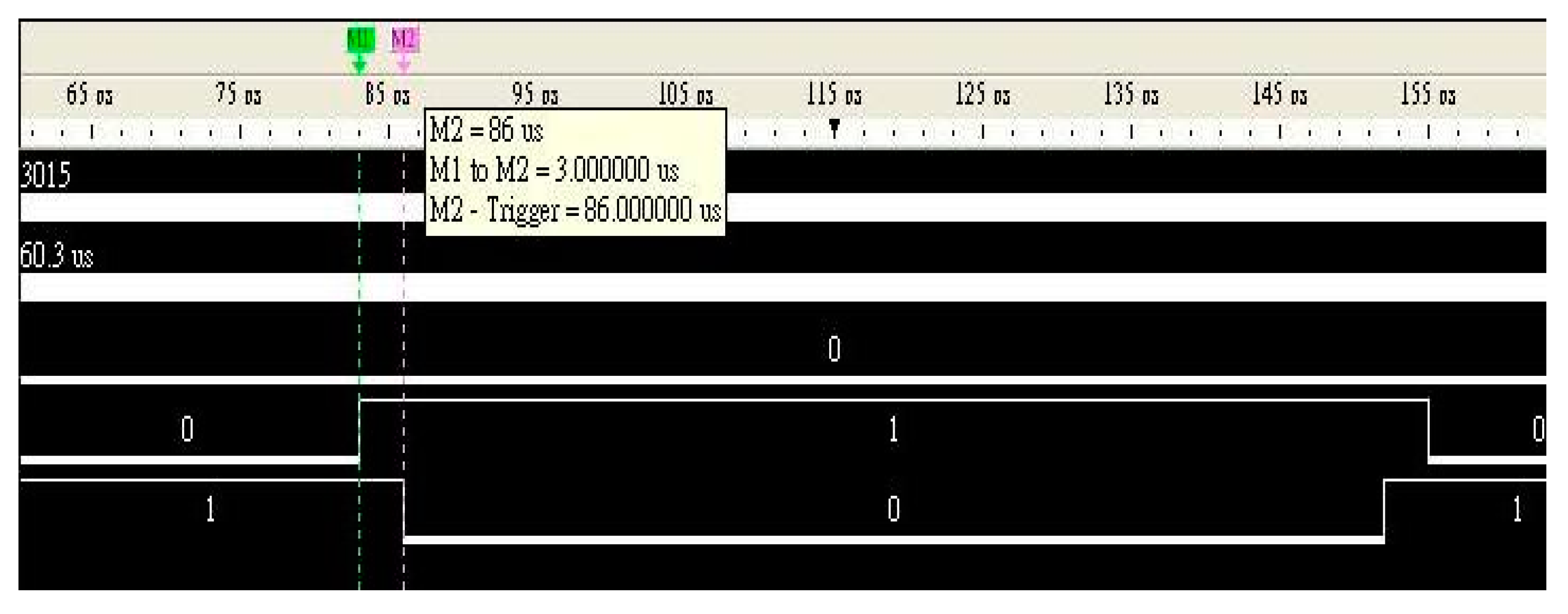
Figure 16 presents the waveforms of the six arms measured using a logic analyzer. In
Figure 16, three complementary switches, Ua_out and Da_out, Ub_out and Db_out, and Uc_out and Dc_out, work with a dead time of 3 μs to prevent a short circuit between the upper and lower arms.
Figure 17 presents the measured dead time of the complementary switches.
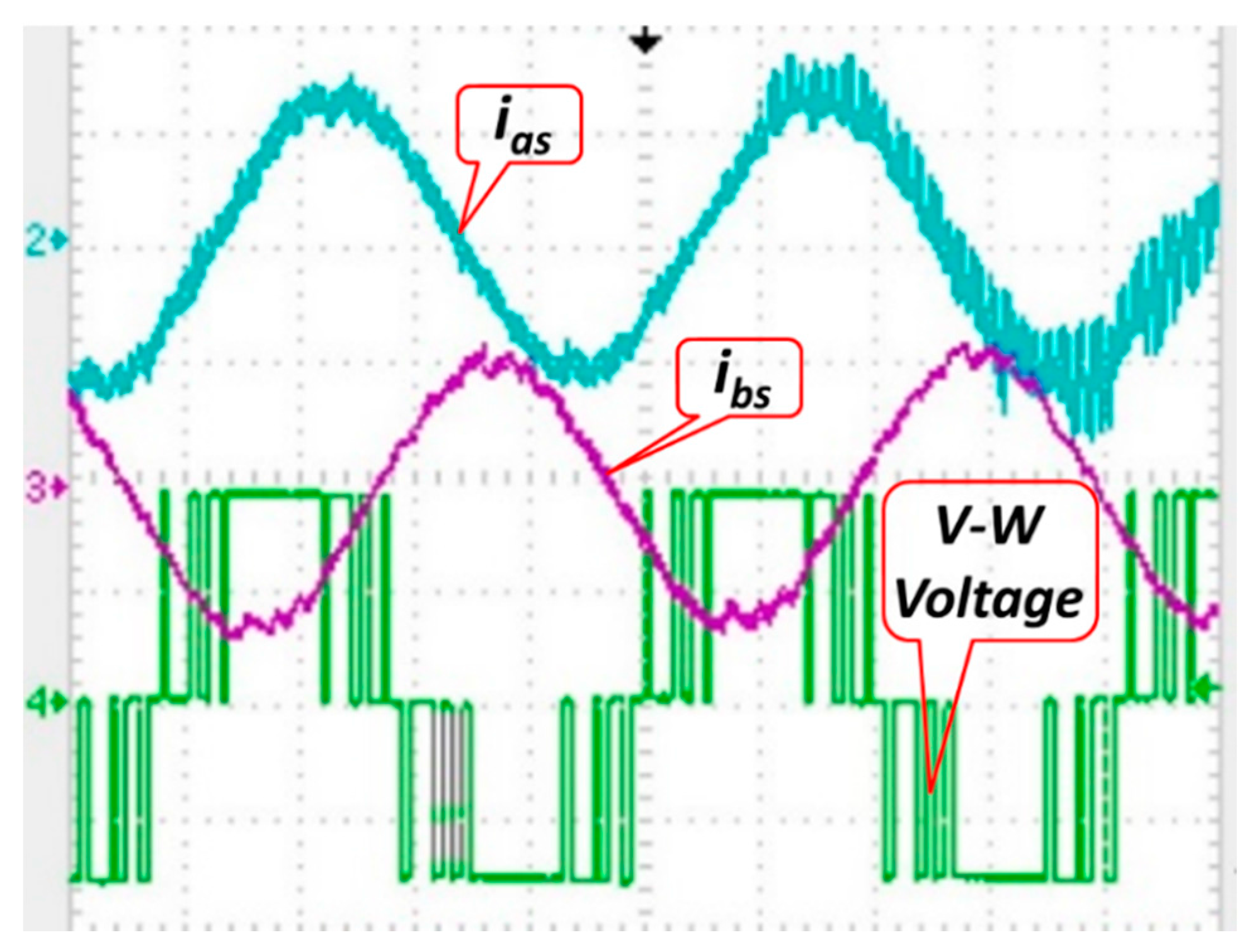
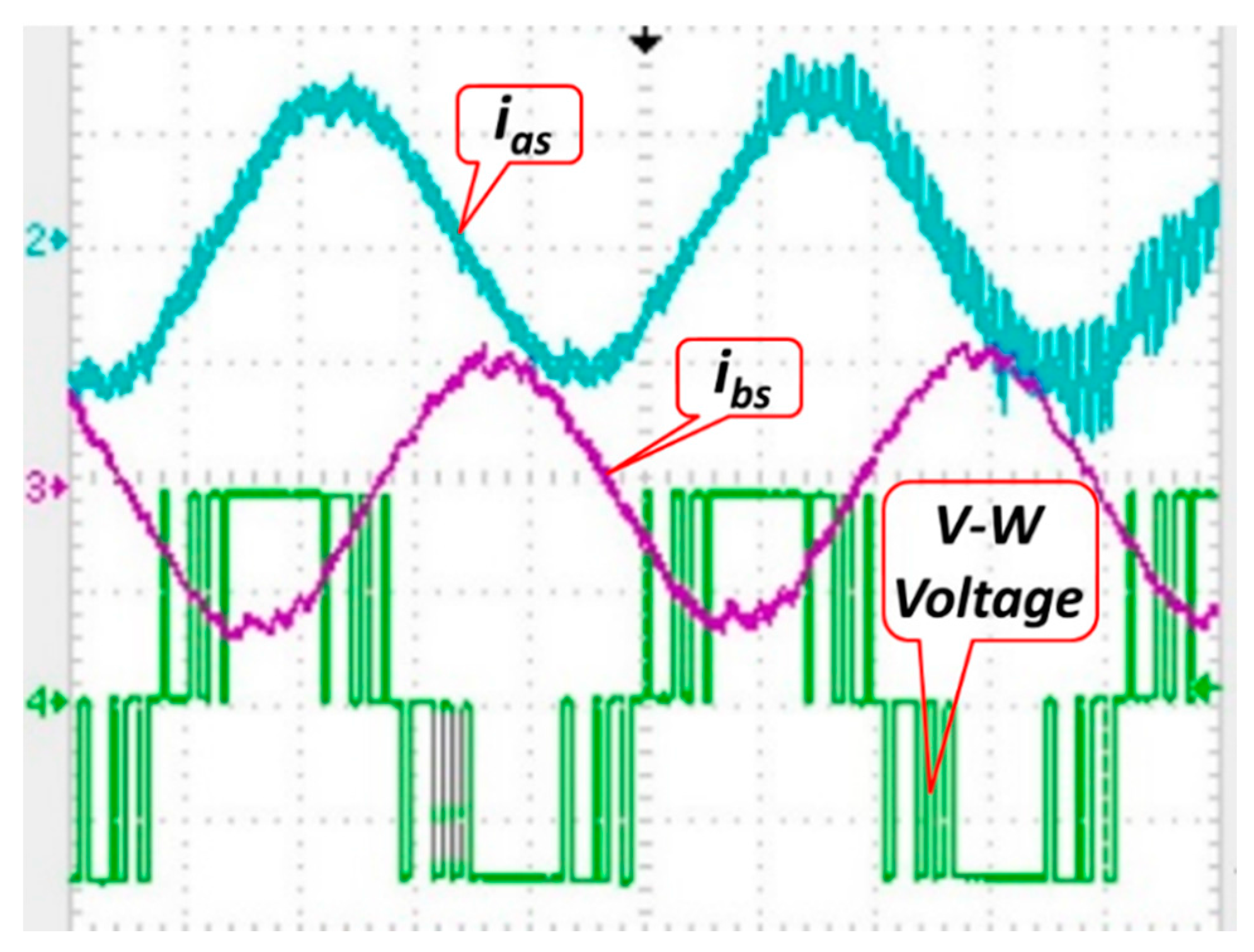
Figure 18 presents the measured feedback currents, i
as and i
bs, generated using the inverter (see
Figure 1). Notably, the second output current of the inverter i
bs was delayed by 120° from the first output current of the inverter i
as.
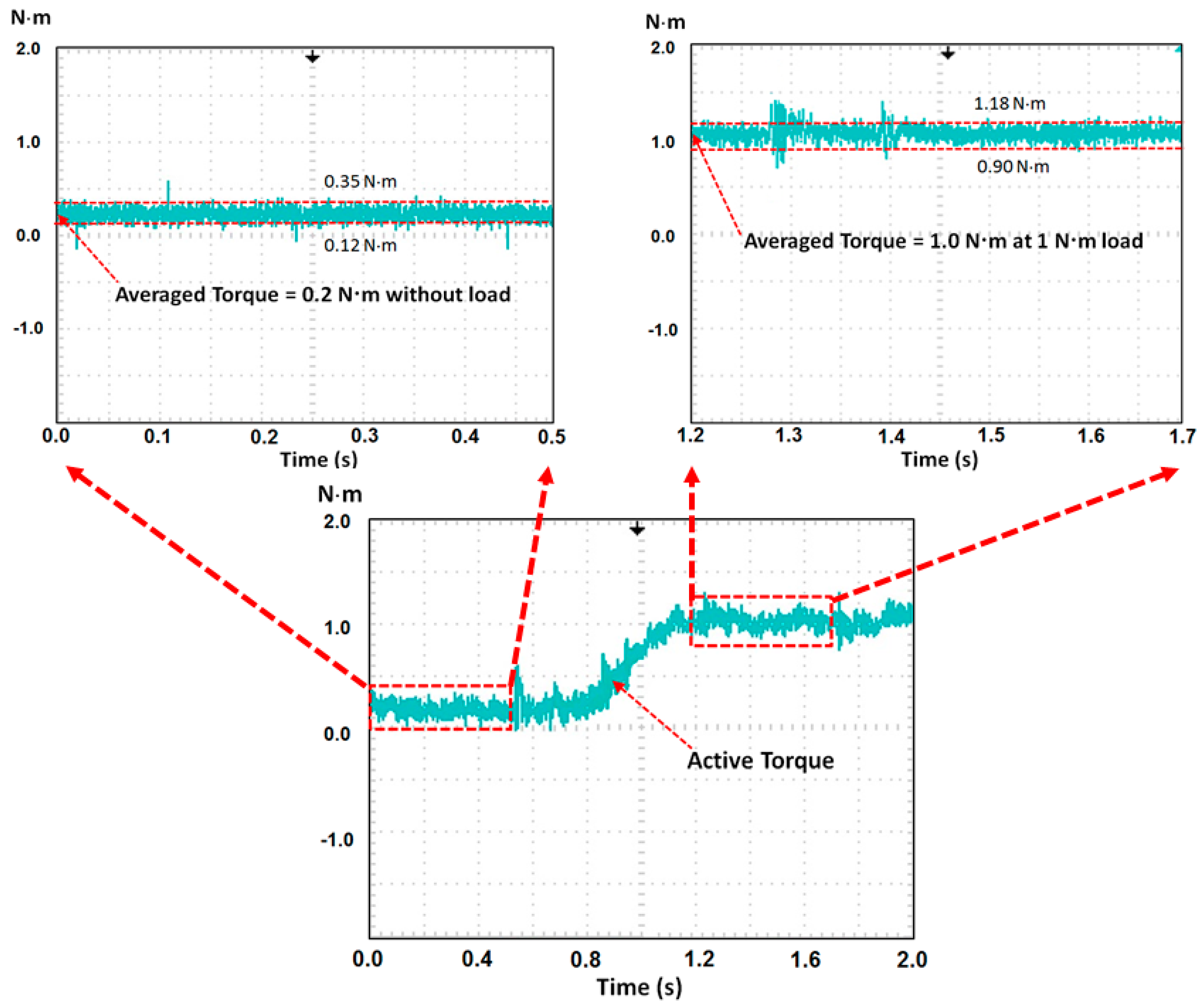
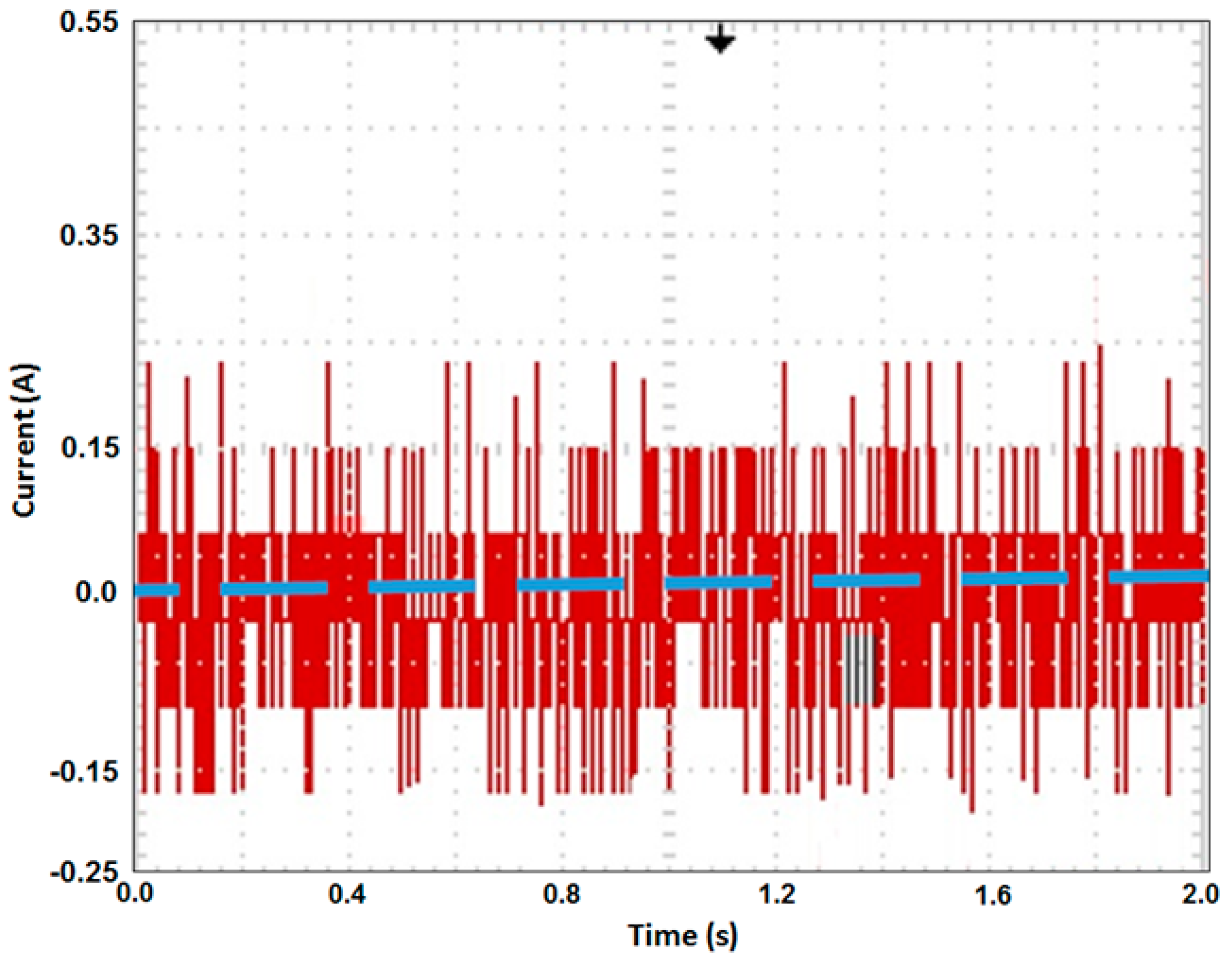
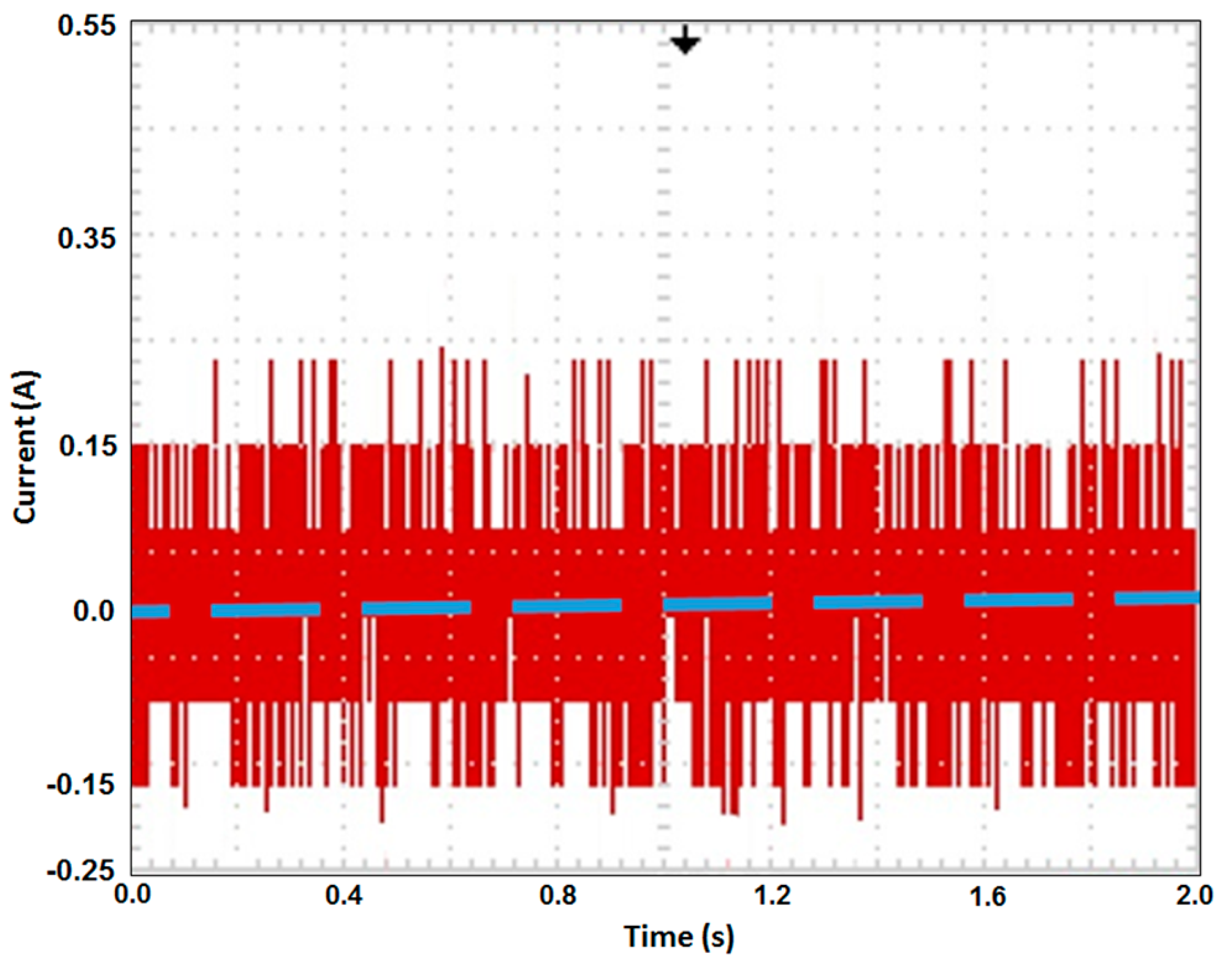
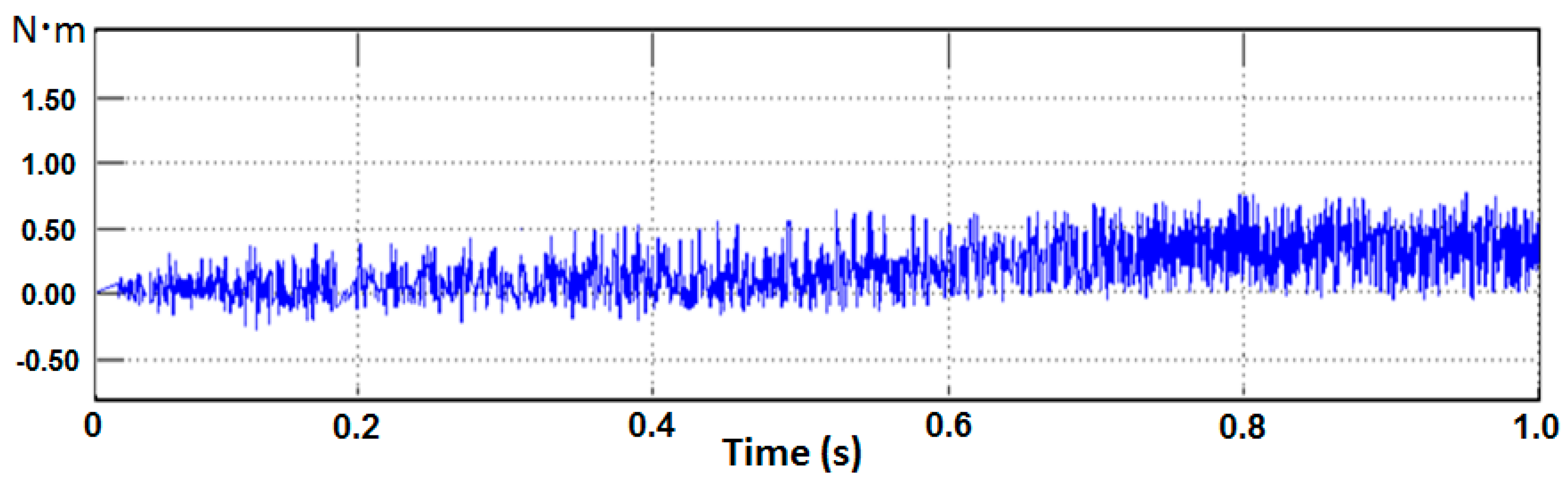
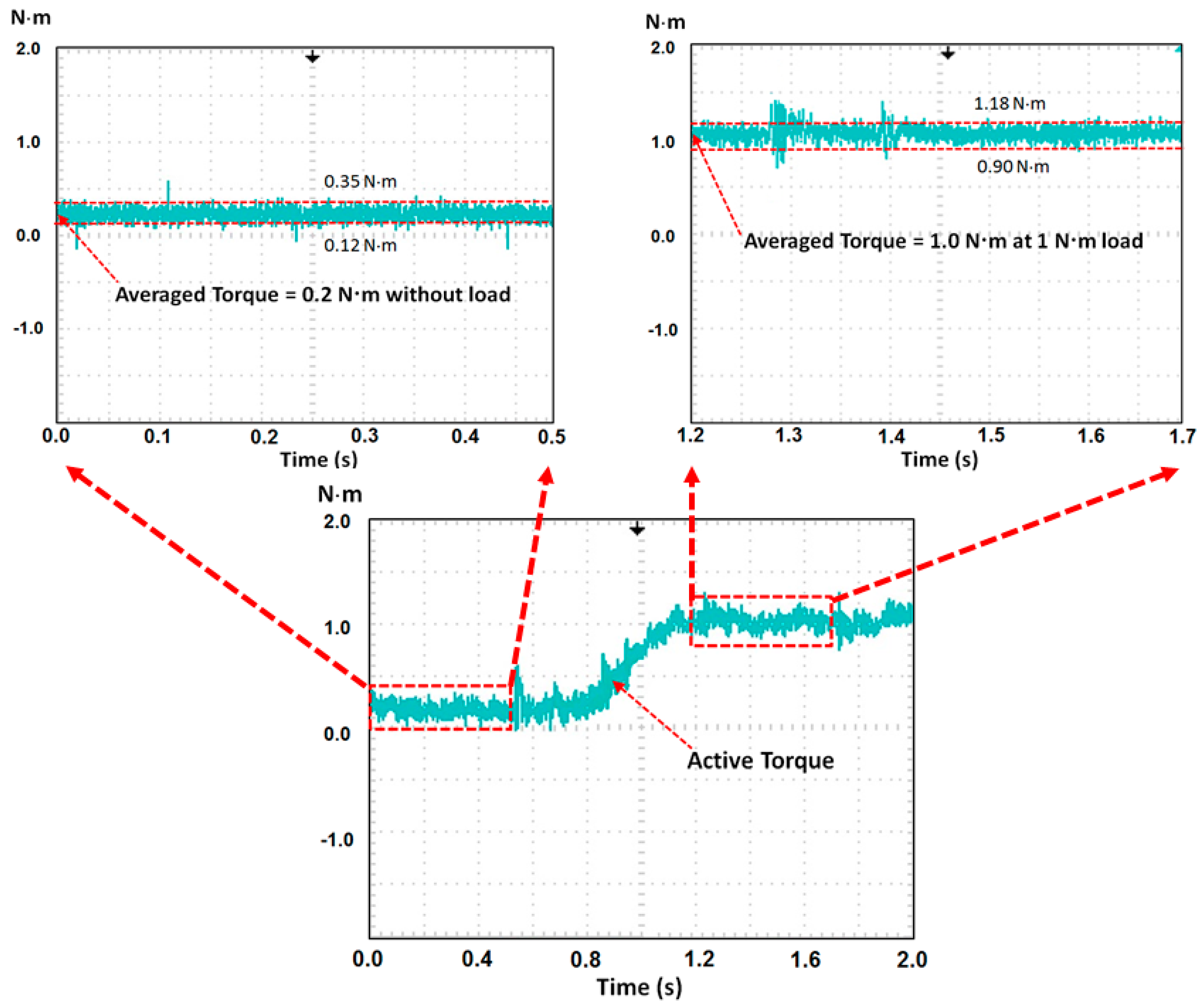
Figure 19 presents the experimental result of the torque response with a 1 N·m load torque and a 1000 rpm motor speed in 2 s for the proposed fuzzy PDTC. The torque error ripples varied from 0.12 N·m to 0.35 N·m and the average torque is about 0.2 N·m without a load torque, while the torque error ripples varied from 0.90 N·m to 1.18 N·m and the average torque is approximately 1.0 N·m at a 1 N·m load torque and 1000 rpm motor speed. The measured electromagnetic torques perform with small torque error ripples.
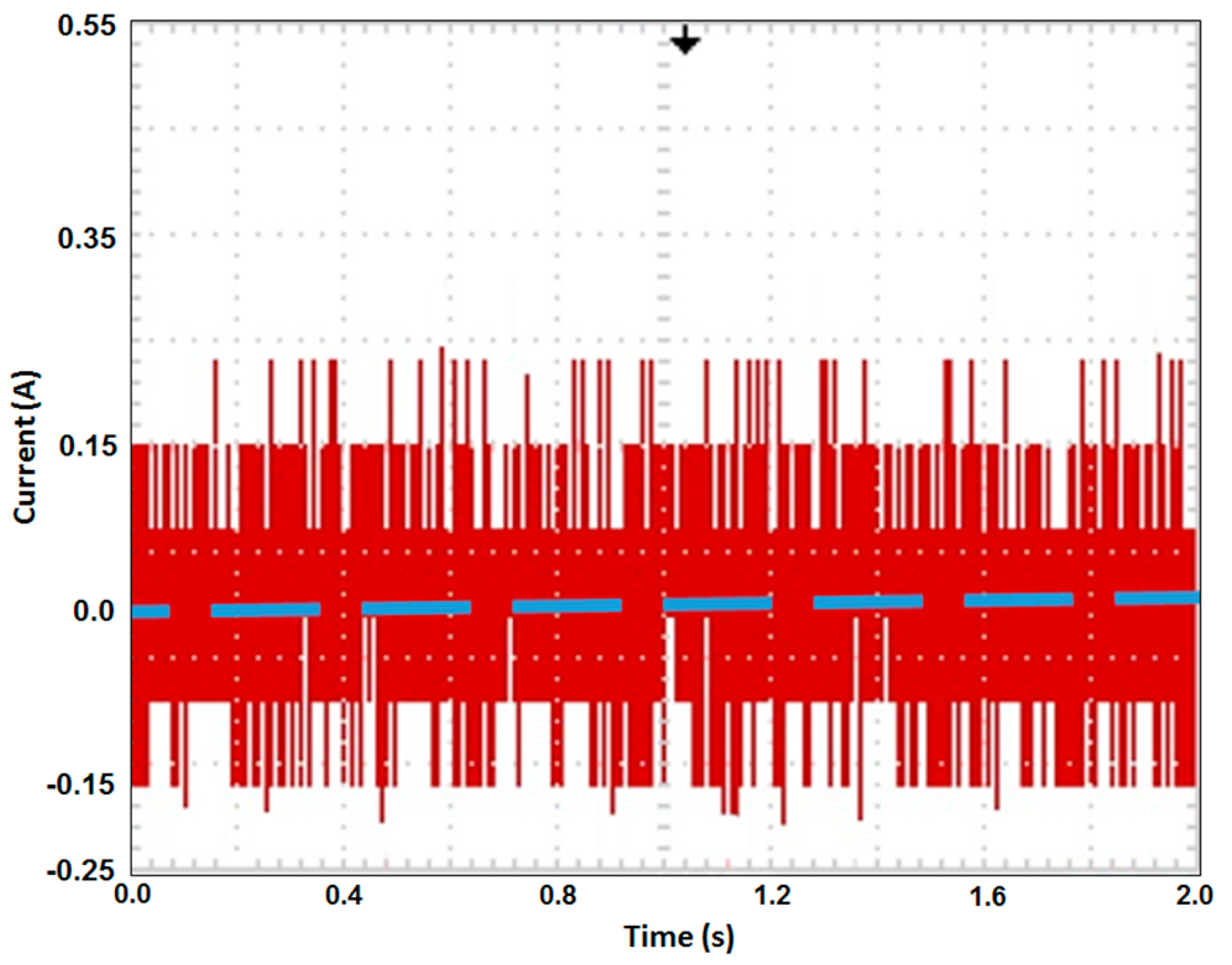
Figure 20 presents the measured current response without torque load and
Figure 21 shows the measured current response at a 1 N·m load torque in 2 s for the proposed fuzzy PDTC. In comparison to [
24], the proposed fuzzy PDTC performs with small current error ripples and small torque error ripples.
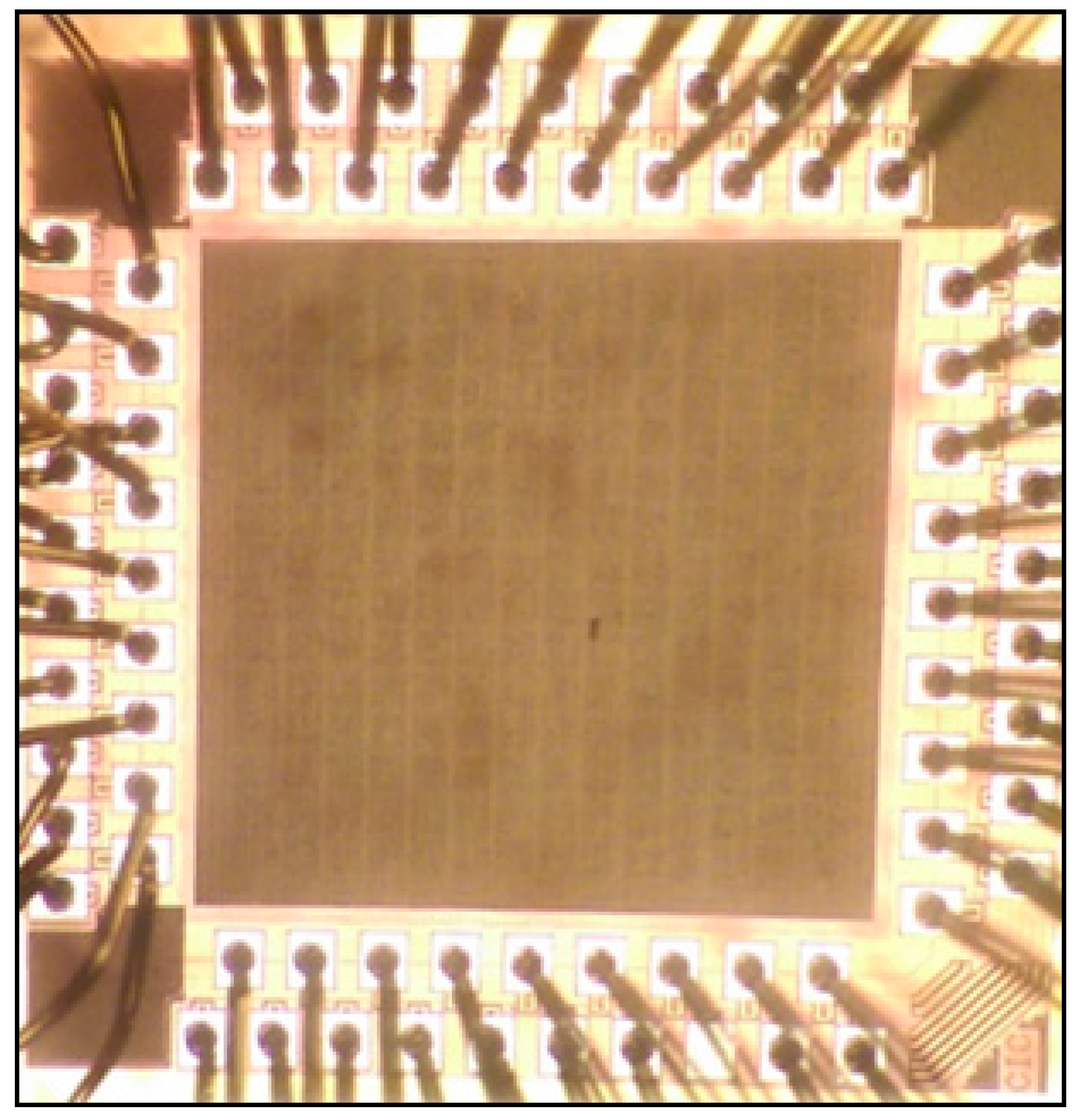
Figure 22 presents a microphotograph of the ASIC.
Table 5 presents the system specifications of the proposed fuzzy PDTC ASIC.
4. Conclusions
This study proposed an ASIC for fuzzy PDTC, which involves the conventional DTC, modified predictive calculation, and fuzzy control. All functional blocks were designed using Verilog HDL and were verified using an FPGA board. The proposed PDTC reduces ripples in the torque and flux hysteresis controllers by reducing the average switching time, and the fuzzy controller helps to achieve a high operating speed and high stability of motor control with a small delay time. The proposed fuzzy PDTC ASIC helps to not only calculate the stator’s magnetic flux and torque by detecting the three-phase currents, three-phase voltages, and rotor speed, but also to eliminate ripples in the torque and flux hysteresis controller by using the fuzzy controller and predictive scheme. According to the simulation results, the proposed fuzzy PDTC achieved a test coverage of 96.03%, fault coverage of 95.06%, and power consumption of 296 mW at an operating frequency of 50 MHz and a supply voltage of 1.8 V. The chip area of the proposed ASIC is 1.81 mm × 1.81 mm, and the chip contains pads.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}