1. Introduction
Harvesting energy from the environment will become increasingly vital in the future, e.g. for powering the Internet of Things [
1]. Piezoelectric energy harvesters (PEH) are one of the most promising solutions, as they provide clean energy and are an alternative to conventional, non-environmentally friendly energy sources such as batteries [
2]. Increasing the harvested energy is always a goal in the development process of PEHs, and optimization techniques are applied for this purpose. Because of the direct and indirect piezoelectric effect, the electromechanical structure and the electric circuit influence each other, and consequently the harvested energy depends on the complete PEH system. Therefore, optimizing the PEH system means that both the electromechanical structure and the electric circuit to be simultaneously optimized for each other.
The geometric shape of a beam-type structure influences the harvested energy and an optimal beam shape is proposed in Dietl and Garcia [
3]. Topology optimization considering the maximum stress in the piezoelectric material is performed in Wein et al. [
4] and yields a novel design of a cantilevered electromechanical structure. In the two approaches only linear electromechanical structures are considered and the electric circuits are simplified to ohmic resistors.
In Miller et al. [
5], an optimization of a PEH system under harmonic base excitation is presented considering a linear electromechanical structure along with a nonlinear electric circuit. A single-degree-of-freedom model representing the electromechanical structure is derived and integrated in an electronic circuit simulator (ECS) to enable system simulation. Ultimately, a sweep over the PEH system parameters is conducted to obtain optimal values. In Bagheri et al. [
6], the optimization of a linear electromechanical structure with SSHI circuit under harmonic base excitation is studied. Mechanical and electrical parameters are introduced as design variables and a semi-analytical model of the PEH is presented. Subsequently, this semi-analytical model is used to generate training data for a neural network. Next, the system parameters of the PEH are optimized using a genetic algorithm in conjunction with the neural network. This approach is limited to linear electromechanical structures.
Most simulation-based optimization approaches presented in the literature focus either on optimizing the electromechanical structure and significantly simplifying the electric circuit, or vice versa. The few optimization strategies that consider both, the electromechanical structure and the electric circuit only take into account harmonic excitations and linear electromechanical structures.
Nonlinear constitutive and dissipative behavior of the electromechanical structure is present for large base excitations, and these nonlinearities must be accounted for in the simulations [
7,
8,
9]. Moreover, when the mechanical excitation of linear PEHs does not coincide exactly with the resonance frequency, the power output drops dramatically [
10]. To solve this inherent problem of low bandwidth of linear electromechanical structures, nonlinearities are intentionally introduced to broaden the bandwidth substantially [
11,
12]. Hence, accounting for nonlinearities of the electromechanical structure is paramount in energy harvesting applications but of course complicates the task of optimizing the PEH to harvest the maximum amount of energy.
This contribution addresses the numerical optimization of a PEH consisting of a nonlinear electromechanical structure and a nonlinear electric circuit under triangular shock-like excitation. No simplifications are introduced due to the optimization method and arbitrary PEHs can be optimized. Firstly, an implicit coupling between a finite element method (FEM) simulation and an electronic circuit simulator (ECS), recently introduced by the authors in Hegendörfer et al. [
13], is used for the analysis of arbitrary PEHs and the optimization problem is presented. Performing multiple simulations to evaluate the objective function is computationally expensive. Hence, a more efficient deep neural network (DNN) is trained based on a set of training data generated from the coupled FEM-ECS simulations. A genetic algorithm then uses the trained DNN to determine the optimal parameters of the PEH that maximize the harvested energy, accounting for a nonlinear stress constraint.
3. Definition of the Optimization Problem
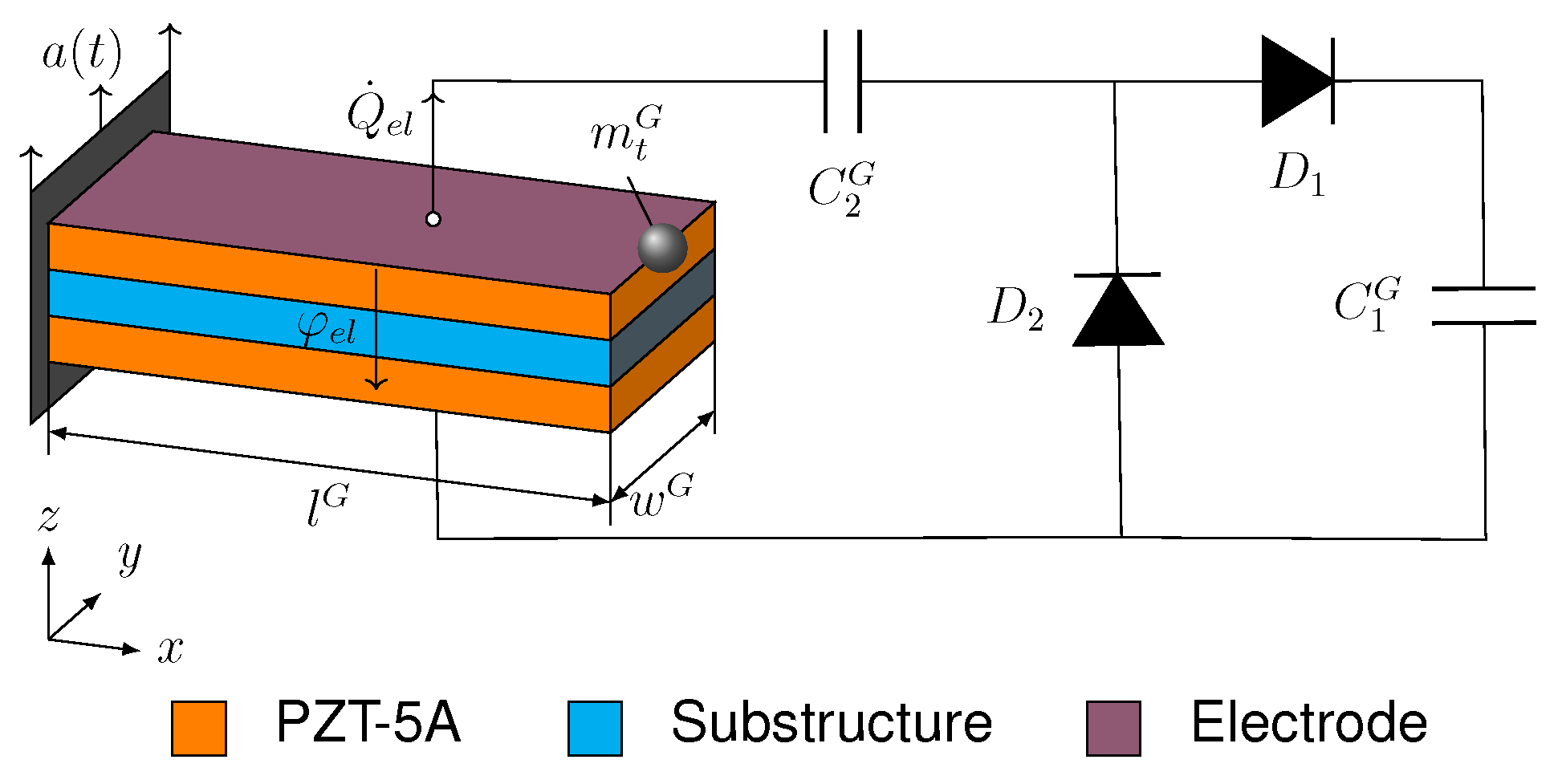
In the following optimization problems, PEHs are considered that consist of a bimorph cantilever beam and either a Greinacher circuit or a standard electric circuit. A prescribed shock-like excitation is applied to the bimorph. The objective of the optimization problem is to evaluate the optimal design variables of the PEH such that the harvested energy is optimized. The PEH with the Greinacher circuit is shown in
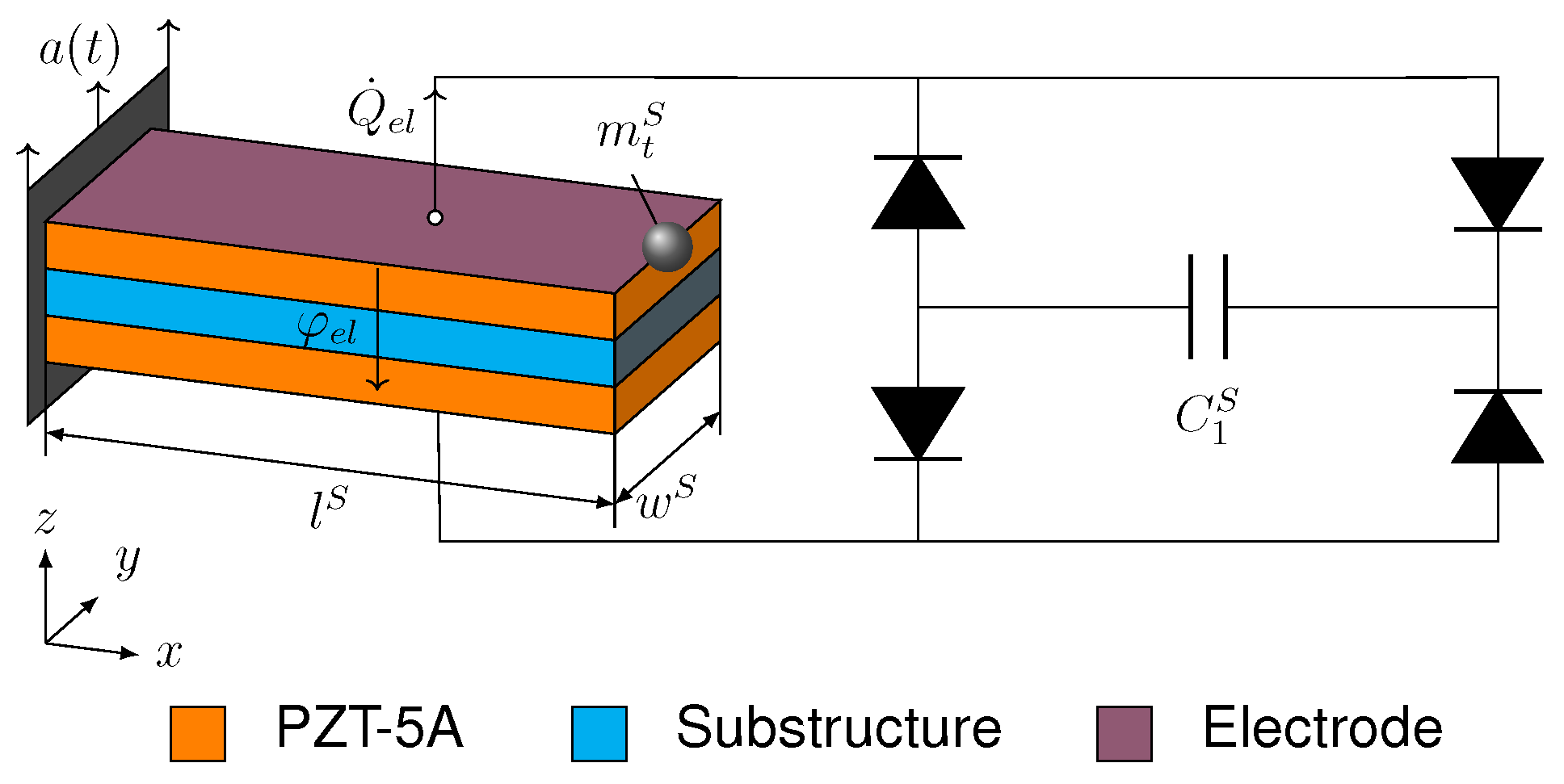
Figure 1 and that with the standard circuit in
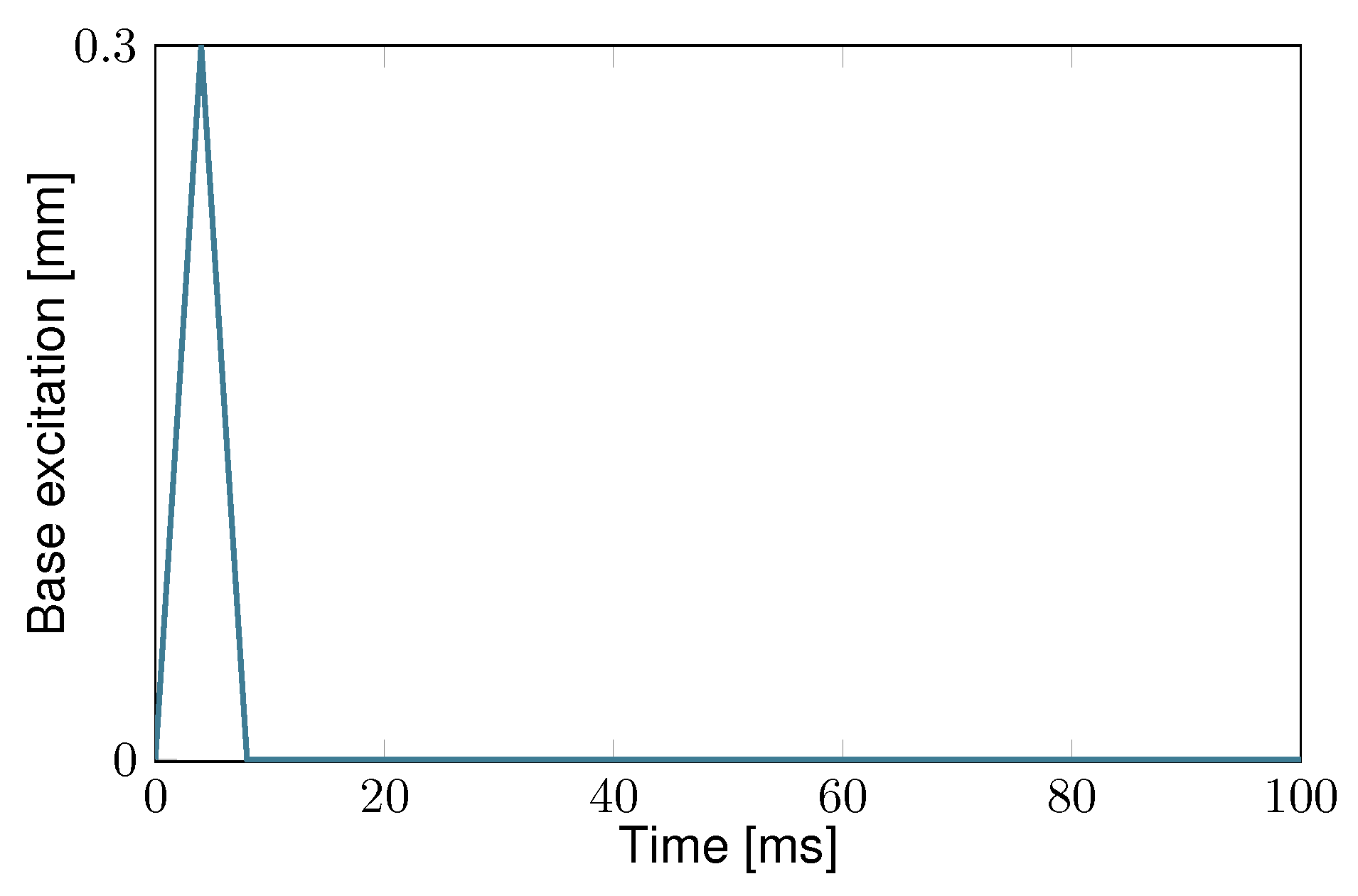
Figure 2. The triangular shock-like excitation is illustrated in
Figure 3.
The bimorph cantilever beam consists of two layers of PZT-5A, bracketing a passive substructure layer [
18]. The layers are poled in opposite directions and connected in series. The thickness of the layers is
mm, that of the substructure
mm. These geometric parameters are fixed in the optimization. The lenght and the width of the beam can be changed in the optimization, with the constraint that the PZT-5A volume remains constant. Therefore, the length is chosen as a design variable. A tip mass is added to the cantilever beam to ensure a more uniform stress distribution. In the simulation, this tip mass is modeled as a point mass. Its value
is used as a design variable in the optimization.
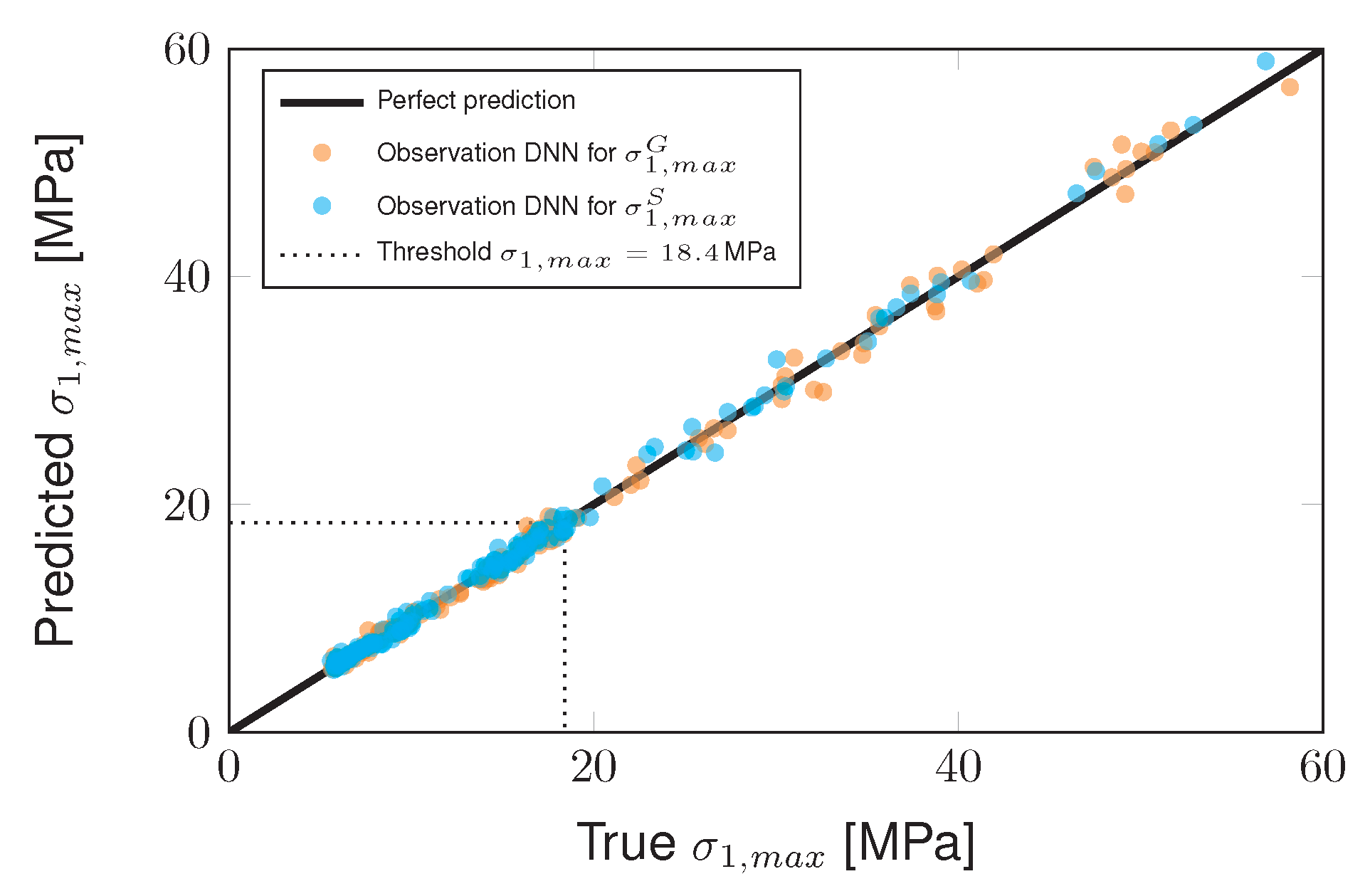
Since PZT-5A is a brittle material it is necessary to ensure that the stresses in the structure do not exceed the strength of the material. The dynamic tensile strength of PZT-5A was reported as 27.6 MPa in Berlincourt et al. [
19]. Applying a safety factor of 1.5, a constraint on the maximum principle stress
of
MPa is used in the optimization.
Since the electromechanical structure operates in its resonance frequency, mechanical damping significantly influences its behavior. The damping caused by the electric circuit is accurately considered in the system simulations. Other sources of damping, e.g. material damping or support damping, are modeled by means of a Rayleigh type damping, compare Equation (
A4). This simplified model assumes that the damping of the structure is mass and stiffness proportional. The two Rayleigh coefficients,
and
, see Equation (
A4), have to be determined experimentally for each particular structure. During the optimization process, the geometry of the electromechanical structure changes and therefore, the Rayleigh coefficients have to be adjusted. To achieve comparable damping in all configurations, the Rayleigh coefficients are adapted in a way that the damping ratio of the first vibration mode
is constant. This damping ratio can be computed by means of the Rayleigh coefficients as
and was experimentally measured for the original bimorph structure in Erturk and Inman [
18] as
= 0.027. This constant damping ratio is ensured for all bimorph configurations in the simulations by keeping
s/rad fix and computing
from Equation (
4), for
and the first short-circuit eigenfrequency of the particular configuration
.
The bimorph electromechanical structure is connected to two different circuits namely the Greinacher [
20,
21] and standard circuit.
Figure 1 shows the electromechanical structure coupled to the Greinacher circuit, which consists of two diodes and two capacitors whose capacitance values
and
are defined as design variables for the optimization. The harvested energy
is stored in the capacitor
and the voltage across
is denoted as
.
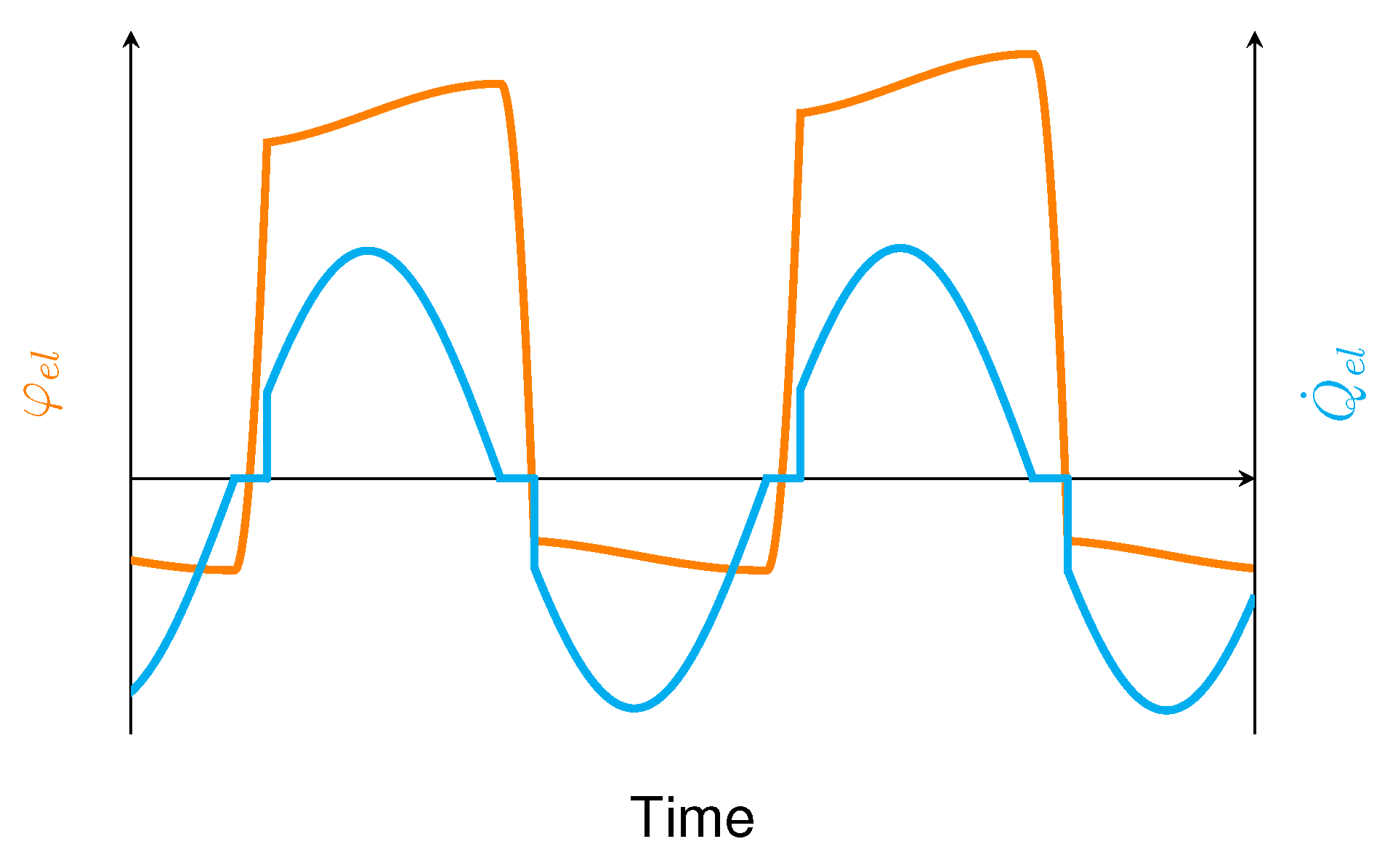
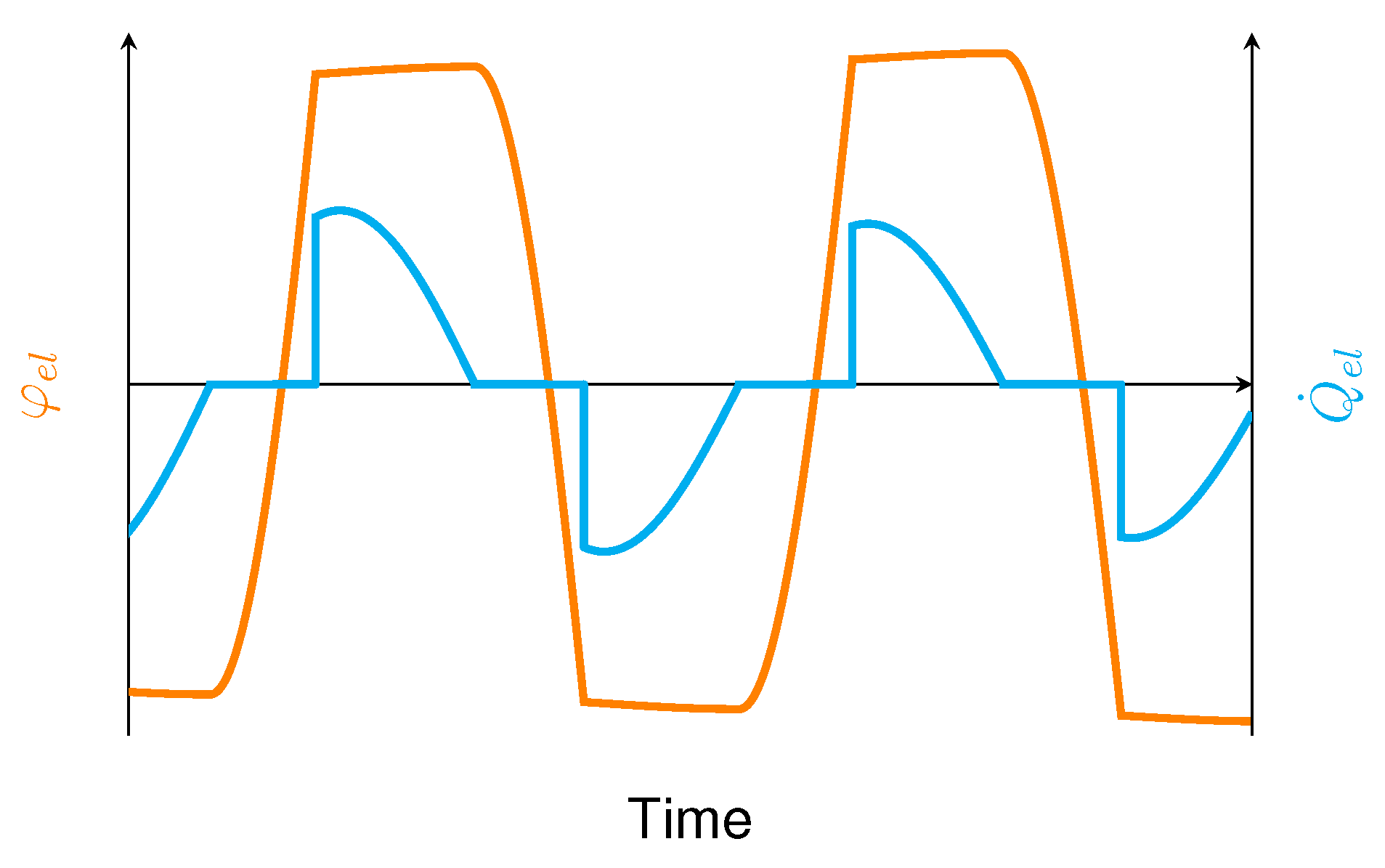
Figure 4 presents the typical wave form of the electric voltage and the current on the electrode for the Greinacher circuit under harmonic base excitation of the electromechanical structure. Because the polarity of the electric current charging capacitor
changes during operation of the circuit, the voltage across capacitor
also changes its direction. Since the direction of the voltage
across capacitor
is different than that across
when the electric voltage
increases, the electric voltage value
necessary to charge capacitor
is reduced. Only one diode is used when charging the capacitor
, resulting in relatively low electrical losses.
Figure 2 presents the electromechanical structure equipped with the standard circuit. It consists of four diodes forming a full bridge rectifier and a storage capacitor, whose capacitance value
is to be optimized. In
Figure 5 the typical wave form of the electrode voltage and the electric current for the standard circuit under harmonic base excitation of the electromechanical structure is shown. During charging, the voltage
across
increases and, thus higher electrode voltages
are necessary to further charge the capacitor
. The performance of the standard circuit does not depend on the polarity of the electrode voltage
resulting in symmetric wave forms for the electrical signals. When the capacitor
is charged, the electric current
has to pass two diodes, which leads to higher electric losses compared to the Greinacher circuit.
For the electromechanical structure with the Greinacher circuit, there are four design variables
in the optimization problem, the length of the beam
, the tip mass
and the two capacitances
and
. Their lower and upper bounds are given in
Table 1. The electromechanical structure with the standard circuit has three design variables
, length of the beam
, tip mass
and the capacitance
. Their bounds are given in
Table 2.
The optimization problem to maximize the harvested energy reads
whereby the maximum stress constraint and the bounds for the design variables have to be taken in to account. The harvested energy
is stored in the capacitor
and can be obtained as
whereby
is the voltage across the capacitor
and depends on the design variables
.
The solution of the optimization problem (
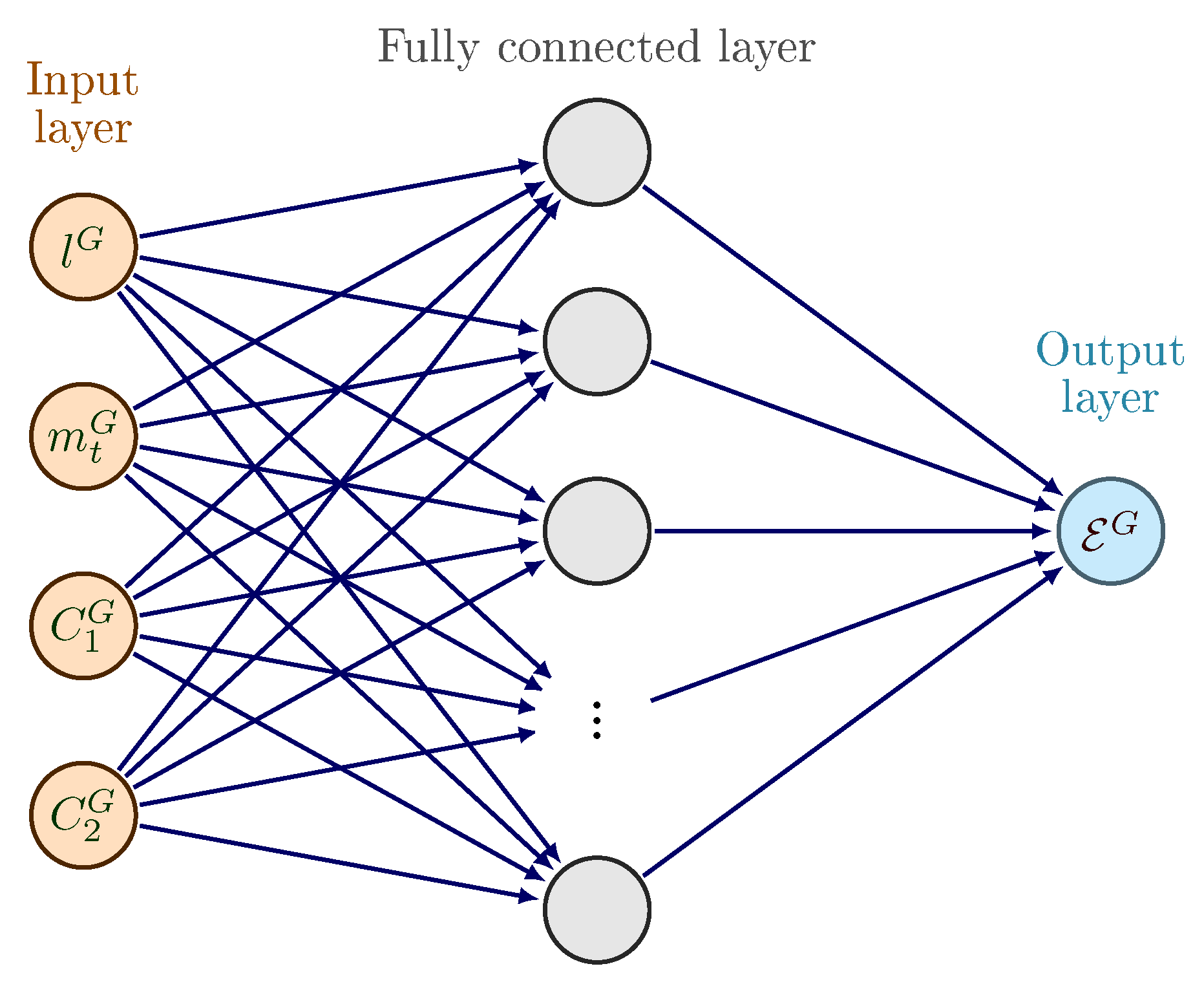
5) usually requires the solution of the system simulation and the computation of the harvested energy
for many combinations of the design variables. Since the system simulations are quite expensive, a deep neural network is trained to compute the harvested energy and the maximum principle stress depending on the design variables. After the training phase, this DNN model can then efficiently be evaluated during the solution of optimization problem (
5).
5. Optimization Results
A genetic algorithm is used to solve the optimization problem (
5) and to find the optimal set of design variables for the configuration with Greinacher circuit
and for the configuration with standard circuit
. Genetic algorithms in combination with DNNs have been shown to be effective for comparable optimization problems in Bagheri et al. [
6], Chimeh et al. [
23], Nabavi and Zhang [
24]. The idea of a genetic algorithm is to repeatedly modify a population of individual solutions by using them as parents to produce the children of the next generation. Over several generations, the population evolves towards an optimal solution [
22]. Genetic algorithms usually need a high number of objective function evaluations, but these are very inexpensive due to the use of DNNs.
Table 3 presents the optimal values for the design variables for the configuration with Greinacher circuit
and for the configuration with standard circuit
.
To obtain the optimal values , the genetic algorithm requires around evaluations of the harvested energy for the Greinacher configuration and around evaluations of for the standard circuit configuration since it has one design variable less.
The PEHs with these optimal design variables are simulated with the coupled FEM-ECS simulation method.
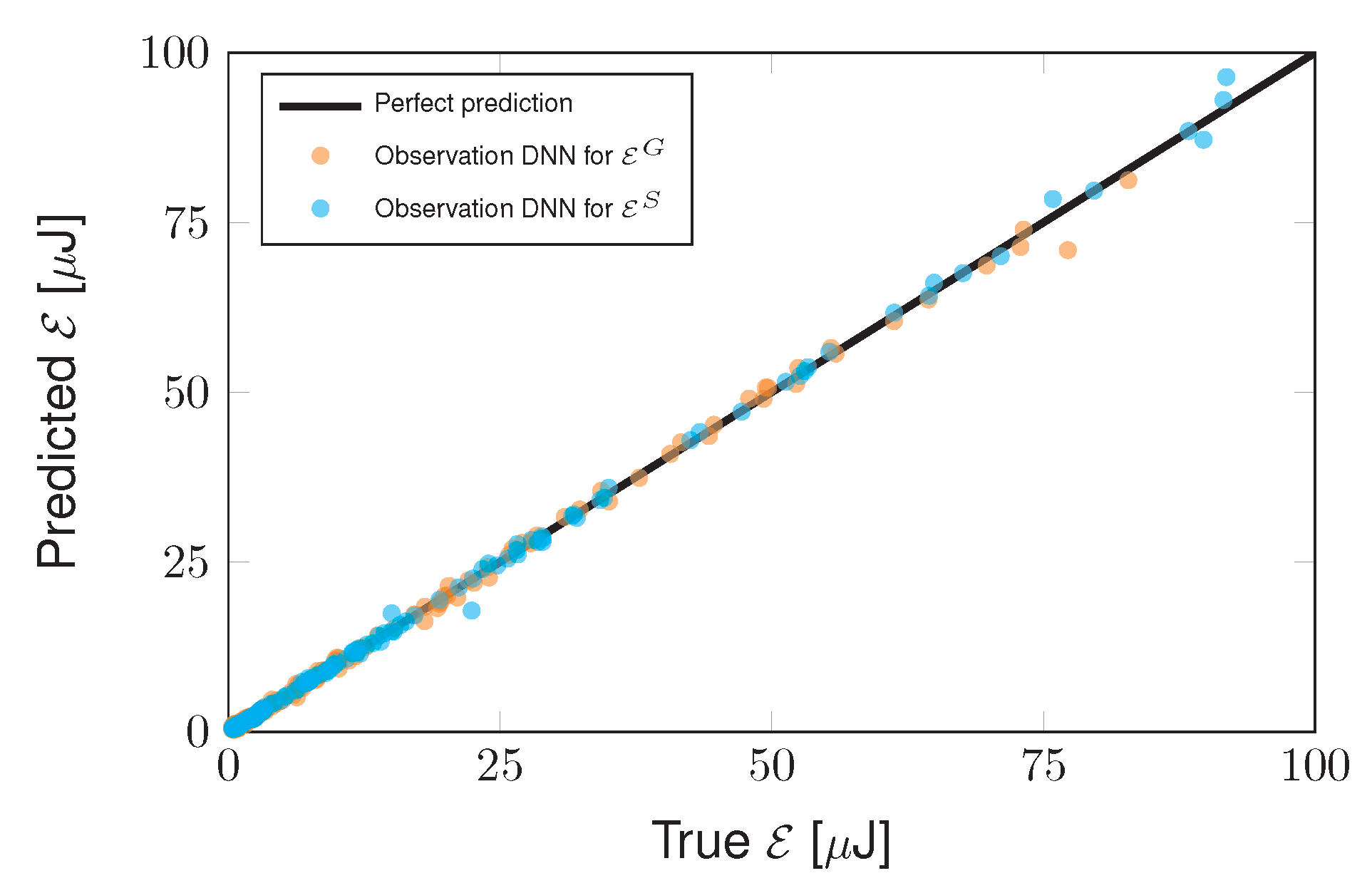
Table 4 compares the predicted values of the DNNs for the maximum harvested energy
and the maximum mechanical stress
for the optimal design variables
against the true values obtained by the coupled FEM-ECS simulations. The relative error is below 5% for the predictions of the DNNs for both configurations, confirming the accuracy of the DNNs.
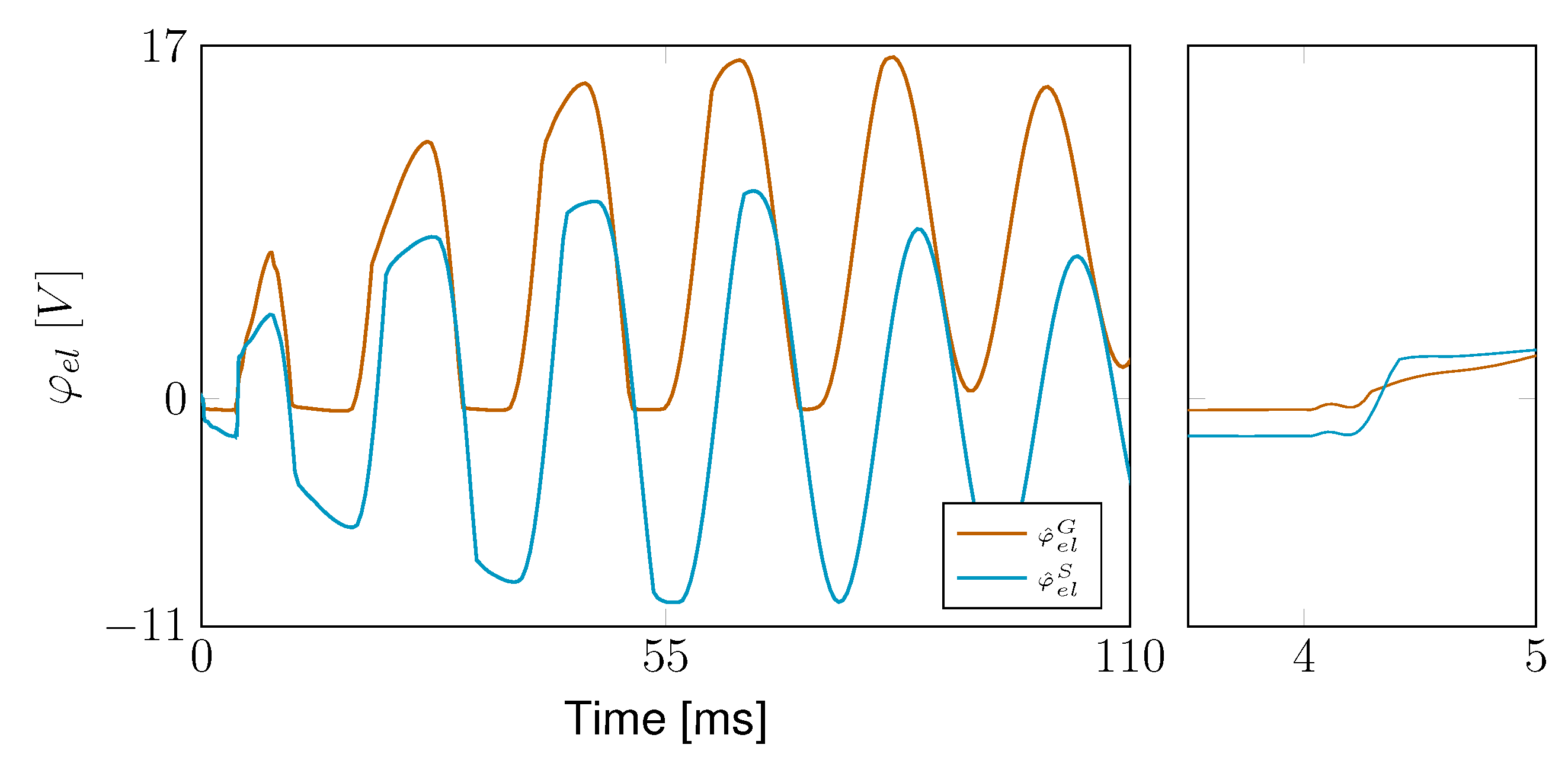
Figure 9 shows the time signals of the electrode voltage for the Greinacher configuration
and for the standard circuit configuration
obtained by the coupled FEM-ECS simulations. In the beginning of the simulation, the electromechanical structure is at rest and the base excitation starts. The shock-like base excitations results in higher frequency modes, which can be observed in the zoom-in in
Figure 9 on the right. Because the capacitor
of the optimal Greinacher configuration is relatively large, the electric voltage
can not reach high negative values. As a result, the oscillation of the electric voltage
is shifted into the positive range. Consequently, the storage capacitor
of the optimal Greinacher configuration is much smaller compared to that of the optimal standard circuit configuration
and the electric voltage
becomes significantly higher than
. After around 82 ms for the Greinacher configuration and at around 66 ms for the standard circuit configuration the electric voltage
can not reach sufficiently high values anymore to charge the storage capacitor
. Due to the damping, the oscillation of the electrode voltage
then decays.
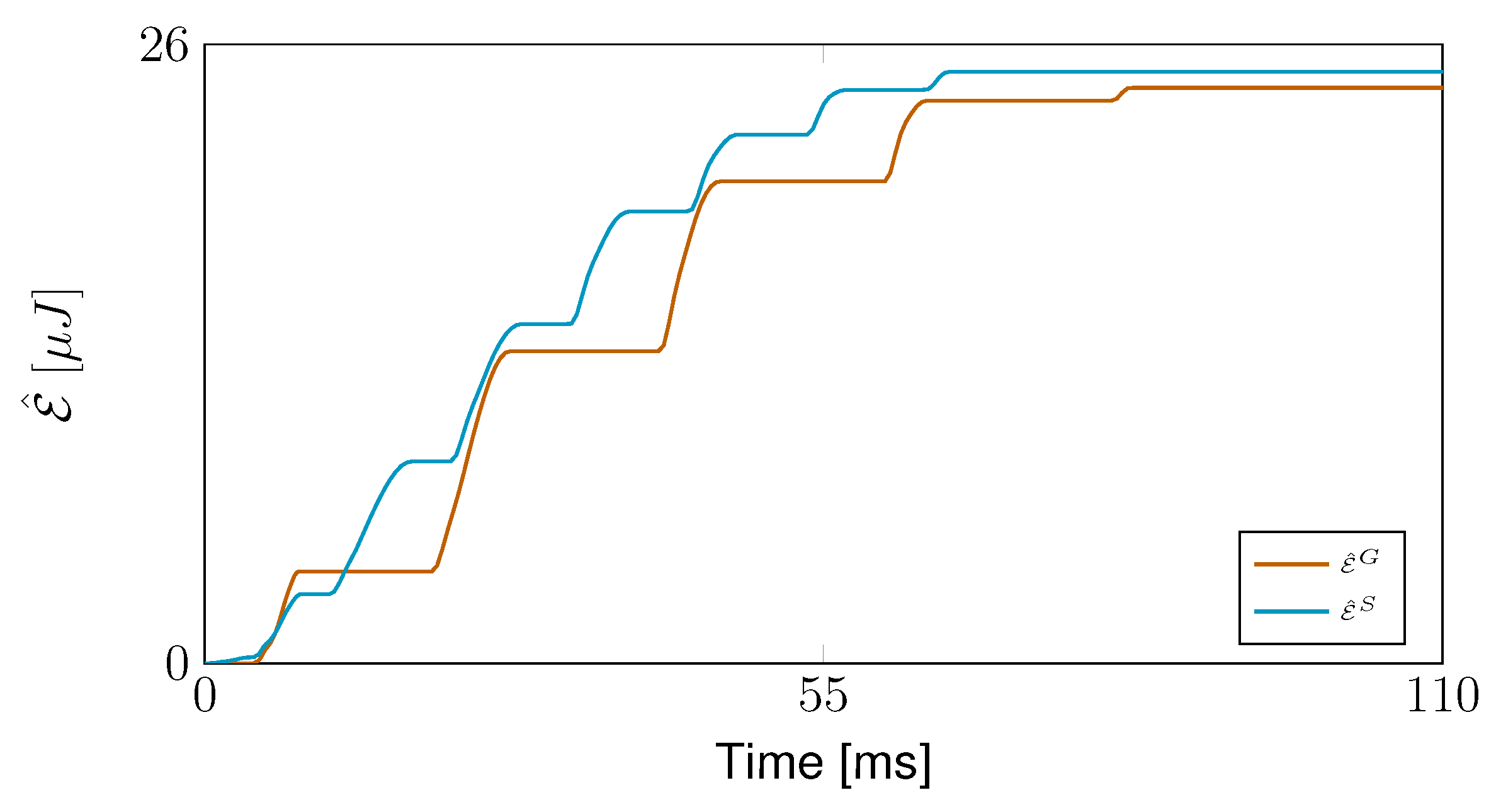
Figure 10 presents the time signals of the maximum harvested energy for the Greinacher
and for the standard circuit configuration
obtained by the coupled FEM-ECS simulations. At the beginning of the simulations, no energy is stored in the storage capacitor
and the harvested energy
vanishes. When the electromechanical structure oscillates, the standard circuit can harvest energy at positive and negative electrode voltages
. In contrast, the Greinacher circuit can only harvest energy at positive electrode voltage
. Therefore, the harvested energy of the standard circuit increases more uniformly compared to the Greinacher circuit. However, the total harvested energy is similar for both configurations.
6. Discussion of the Results
The computational efficiency of DNNs allows for an extended analysis of the optimization problem. The relations between several design variables were examined in detail and resulted in the following observations:
The maximum harvested energies are obtained for configurations that result in maximum principle stresses close to the constraint value.
The capacitances of the electric circuits have a strong influence on the optimal length and tip mass of the beam.
For the Greinacher circuit, the optimal design does not depend on capacitance .
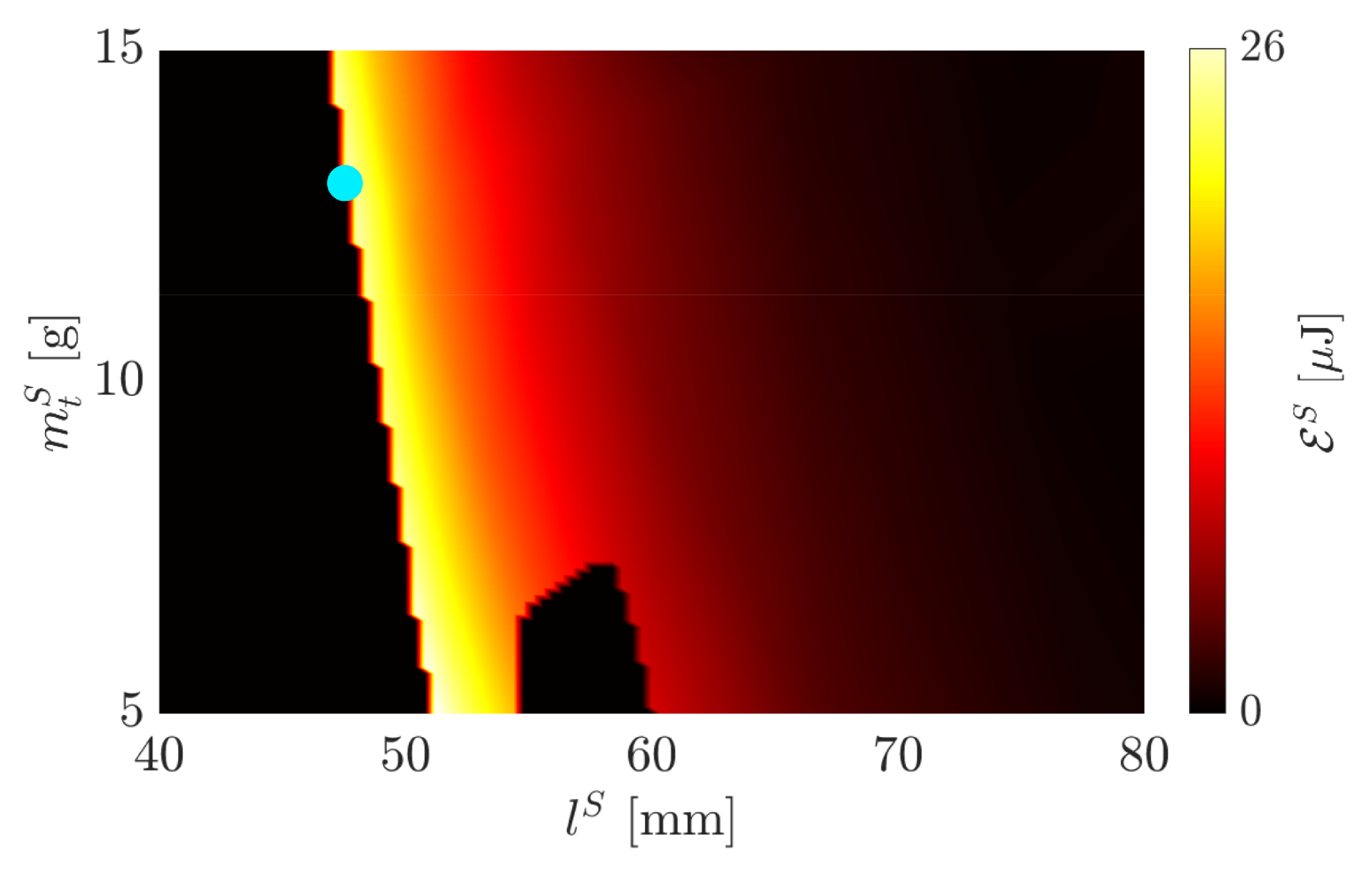
To illustrate the first finding,
Figure 11 presents the harvested energy for the standard circuit configuration
when the tip mass
and beam length
are varied, with the capacitor
µF set to the optimal value. Combinations of
and
that cause violations of the nonlinear stress constraint in Equation (
5) are assigned 0 µJ of harvested energy since failure of the electromechanical structure is assumed. A clear demarcation between parameter combinations with admissible and non-admissible stresses is visible. All parameter combinations along this line give high values for the harvested energy
since larger mechanical stresses result in higher harvested energies due to the piezoelectric effect. The energy values along this line are so close that various optimal parameter combinations of
and
are possible, taking into account the accuracy of the DNNs.
There is also a limited region for a small tip mass and a length of 55–60 mm, in which the stress constraint is violated. The maximum stress in this region is slightly higher than the maximum value of 18.4 MPa, which is also confirmed by the coupled FEM-ECS simulations. This slight increase in the stresses can be caused by an unfavorable deformation response of the electromechanical structure, influenced by the capacitance and the nonlinear piezoelectric material law. For the PEH with the Greinacher circuit, the harvested energy plotted over and looks very similar. These results affirm the importance of an optimization procedure including a stress constraint for the piezoelectric material. Due to the piezoelectric effect, high amounts of energy are harvested for high stresses in the material. Therefore, evaluation of a stress constraint during the optimization is required to ensure that the PEH does not only harvest the highest amount of energy but can also withstand the mechanical stresses that occur.
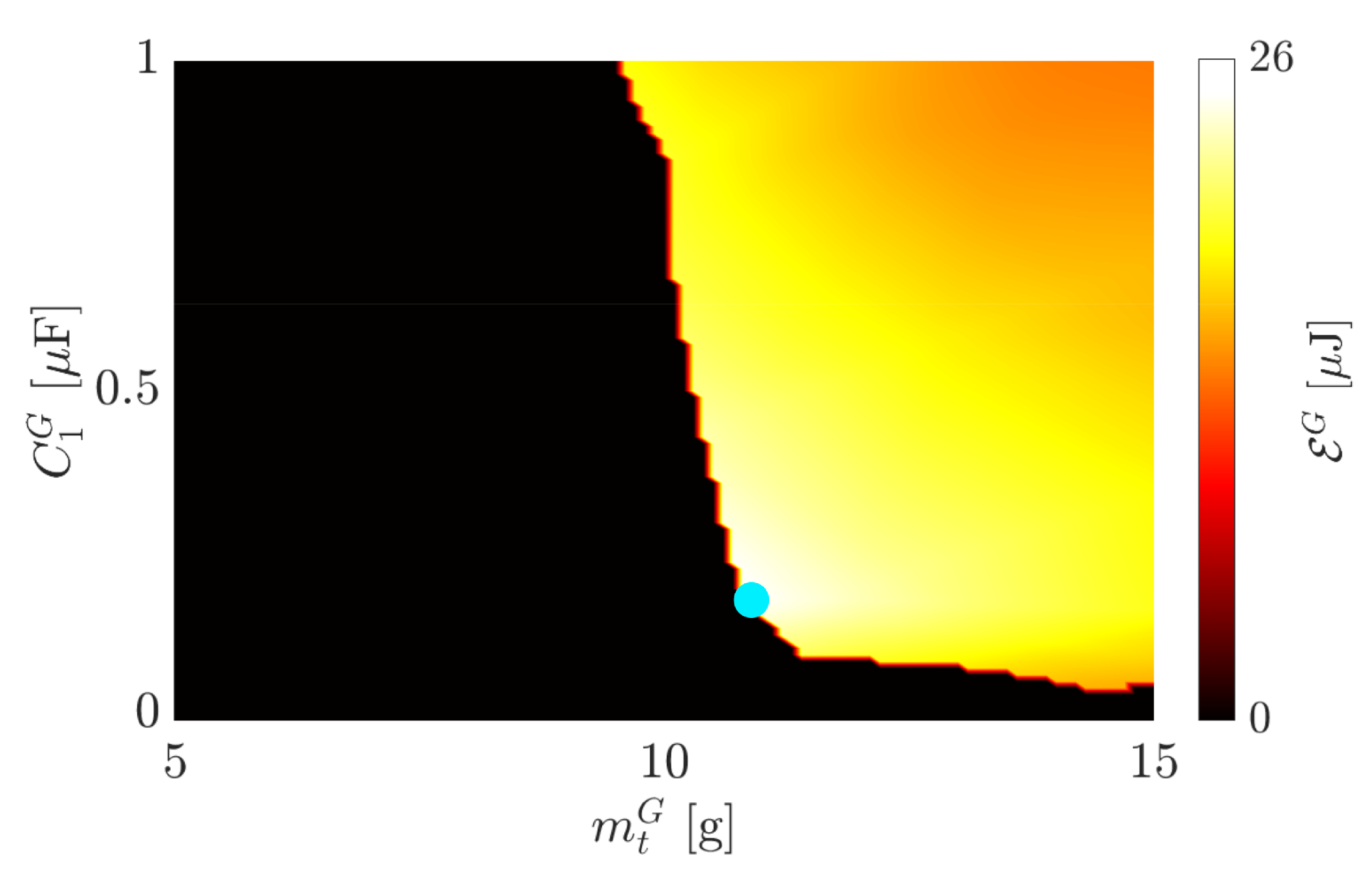
Figure 12 presents the harvested energy for the Greinacher circuit configuration
when the tip mass
and capacitor
are varied, with the length
mm and capacitor
µF set to their optimal values. When the stress constraint is violated, 0 µJ of harvested energy is assigned. The optimal combination of
and
is at the border defined by the stress constraints. Due to the coupling between the electromechanical structure and the electric circuit, both the tip mass
and the storage capacitor
significantly influence the mechanical stresses, resulting in a curved boundary of admissible stresses. The harvested energy for the standard circuit plotted over the mass
and the capacitance
looks similar, only that the optimum is obtained for larger values for
. The energy curves over the capacitance and the beam length also show similar characteristics. It is important to note that the capacitance significantly influences the optimal mass and length values and also the position of the stress constraint boundary. It is therefore clear that the simultaneous optimization of the electromechanical structure and the electric circuit is necessary.
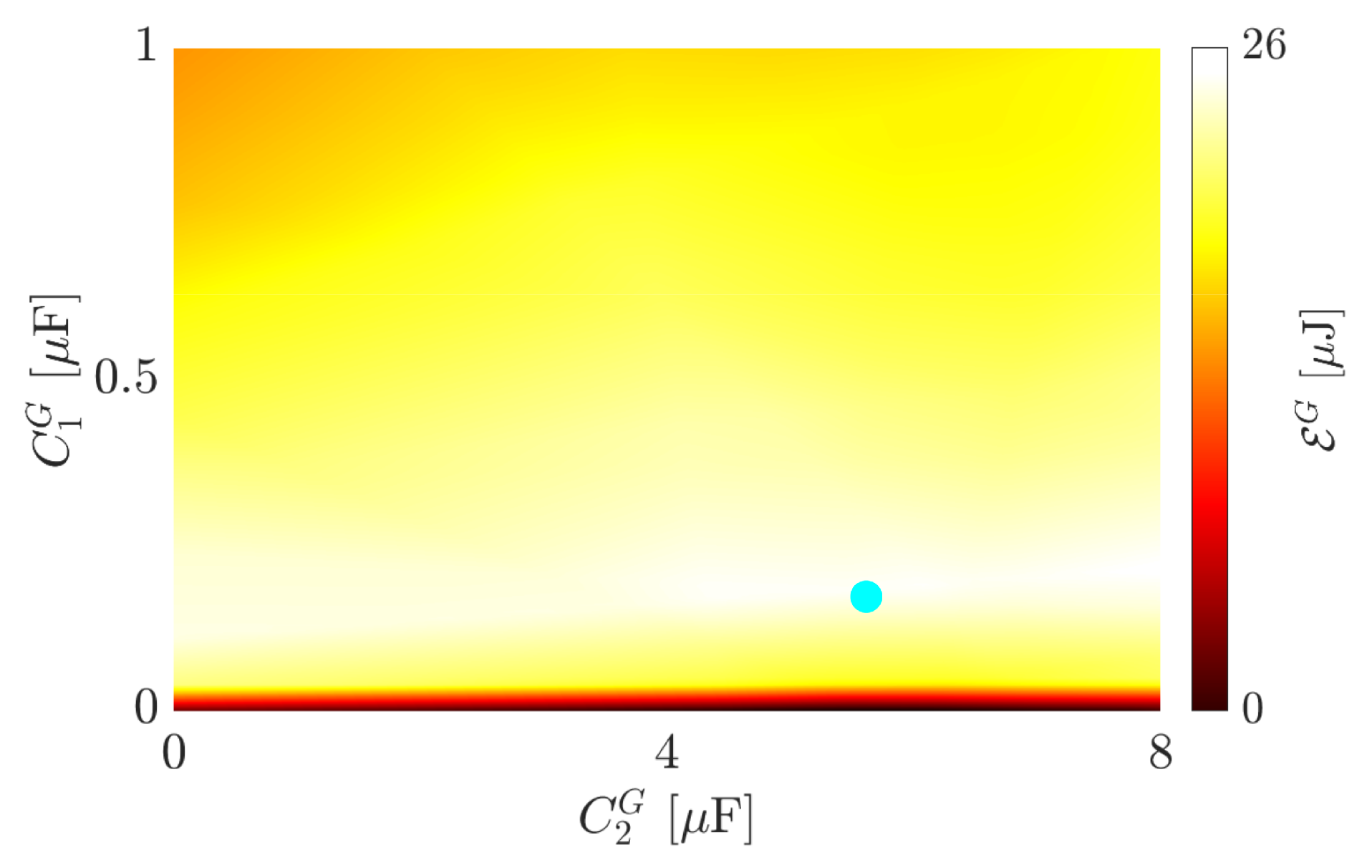
Figure 13 shows the harvested energy for the Greinacher circuit configuration
for different capacitors
and
while the length
mm and the tip mass
g are set to their optimal values. The capacitor
has a significant influence on the harvested energy. In contrast, there is nearly no dependency of the harvested energy on the capacitor
. Therefore, it could be neglected and a half-diode bridge circuit would be obtained. Because significant higher electrode voltages can be reached with the Greinacher circuit than with the standard circuit, the optimal value for the capacitor of the Greinacher circuit
is much smaller than that of the standard circuit
.
7. Conclusions
This contribution introduces a numerical approach to find optimal design variables for an electrically and mechanically nonlinear PEH taking into account a stress constraint. A single shock event in the form of a triangular shock-like base excitation is considered. A bimorph electromechanical structure equipped with Greinacher or standard circuit is used and various design variables are defined that need to be optimized to obtain the maximum harvested energy. For the system simulation of the PEH an implicit FEM-ECS coupling method is applied. Within the coupled system simulation, the capabilities of the FEM and the ECS can be fully exploited and nonlinear PEH under shock-like excitations can be accurately simulated. However, this highly accurate simulation method is computationally expensive and inappropriate for a large number of simulations as required for the repeated evaluation of the objective function during an optimization procedure. Therefore, the coupled FEM-ECS method is used to generate training data for DNNs that are used afterwards to evaluate the objective function in the optimization procedure. It is shown that the trained DNNs are very computational efficient and able to approximate the behavior of the different PEHs configurations accurately. A genetic algorithm is applied to find optimal design variables that maximize the harvested energy and do not violate the stress constraint.
The optimal configurations of the PEH with the Greinacher and the standard circuit harvest approximately the same amount of energy. The optimal value of the storage capacitor of the Greinacher circuit configuration is much smaller than that of the standard circuit configuration, resulting in a higher capacitor voltage in the Greinacher circuit configuration. In energy harvesting applications, higher voltages are usually preferred because they result in lower electrical losses when the electrical energy in the storage capacitor is further processed. The result that the two circuits harvest approximately the same amount of energy applies only to the optimization problem considered and may change under other conditions, e.g., other base excitations or geometries of the PEH.
For the PEH with both electric circuits the maximum harvested energies occur at the boundary defined by the stress constraint. The position of this boundary in the parameter space depends on the electric circuit parameters. It is shown that the storage capacitor has a significant influence on the admissible tip mass if the stress constraint is not to be violated. For shock-like excitations, the influence of the capacitor of the Greinacher circuit on the harvested energy is negligible. Consequently, the capacitor can be removed without significant loss of harvested energy and the Greinacher circuit reduces to the half-diode bridge circuit.
In summary, the DNNs, trained by means of accurate coupled FEM-ECS simulations, are able to approximate the behavior of nonlinear PEHs under shock-like excitations. The presented DNN-based numerical optimization procedure can therefore be used to design and optimize general nonlinear PEHs.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}