



Practical Formalism-Based Approaches for Multi-Resolution Modeling and Simulation


Abstract
:1. Introduction
2. Previous Research
2.1. Multi-Resolution Modeling Applications
2.2. Multi-Resolution Modeling Methods
3. Multi-Resolution Translational DEVS Formalism
3.1. Specification of MRT-DEVS Formalism
3.2. Operation of MRT-DEVS Formalisms
| Algorithm 1 Simulation Algorithm for MRT-DEVS Atomic Models |
|
| Algorithm 2 Simulation Algorithm for the MRT-DEVS-Coupled Model |
|
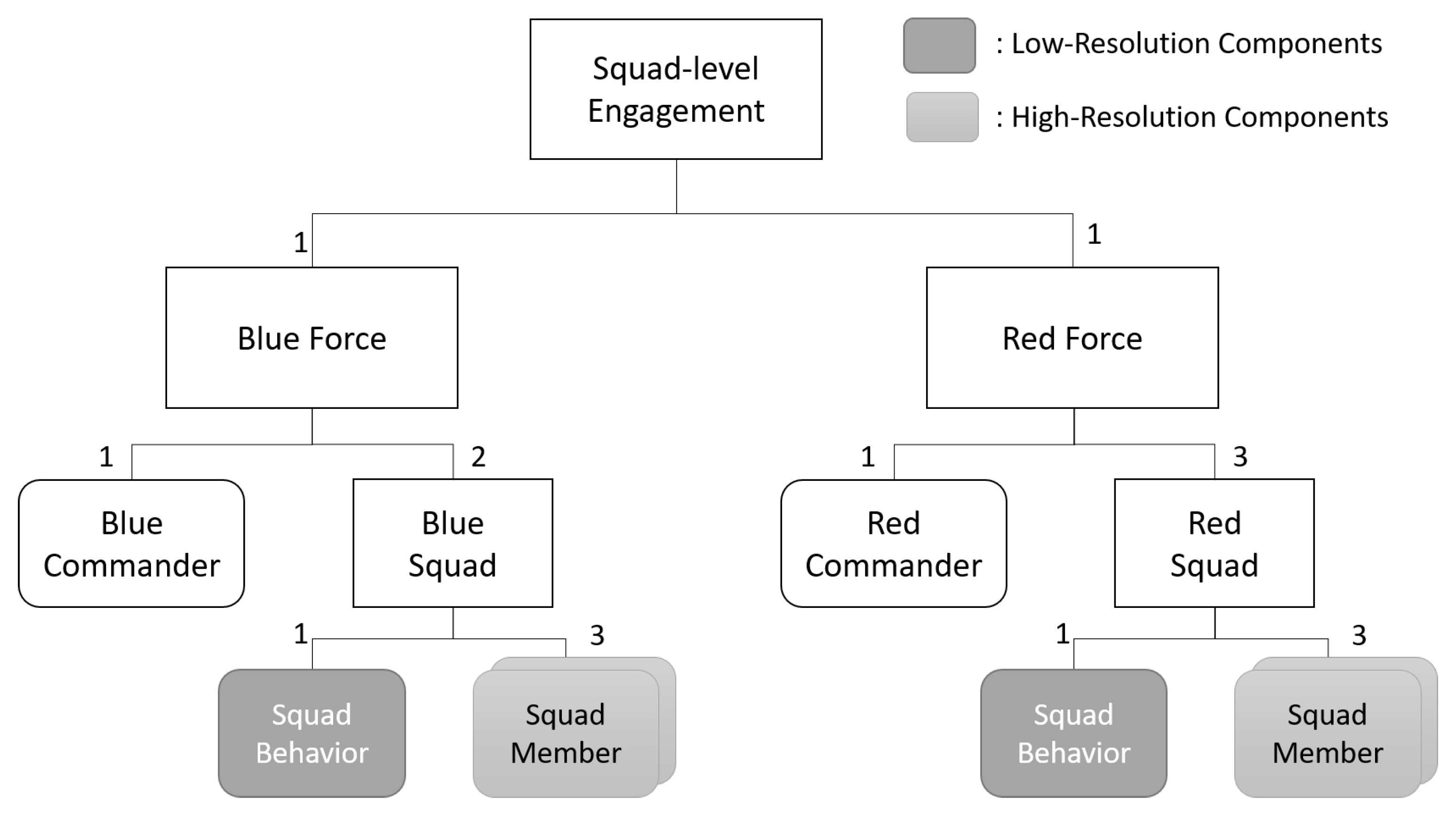
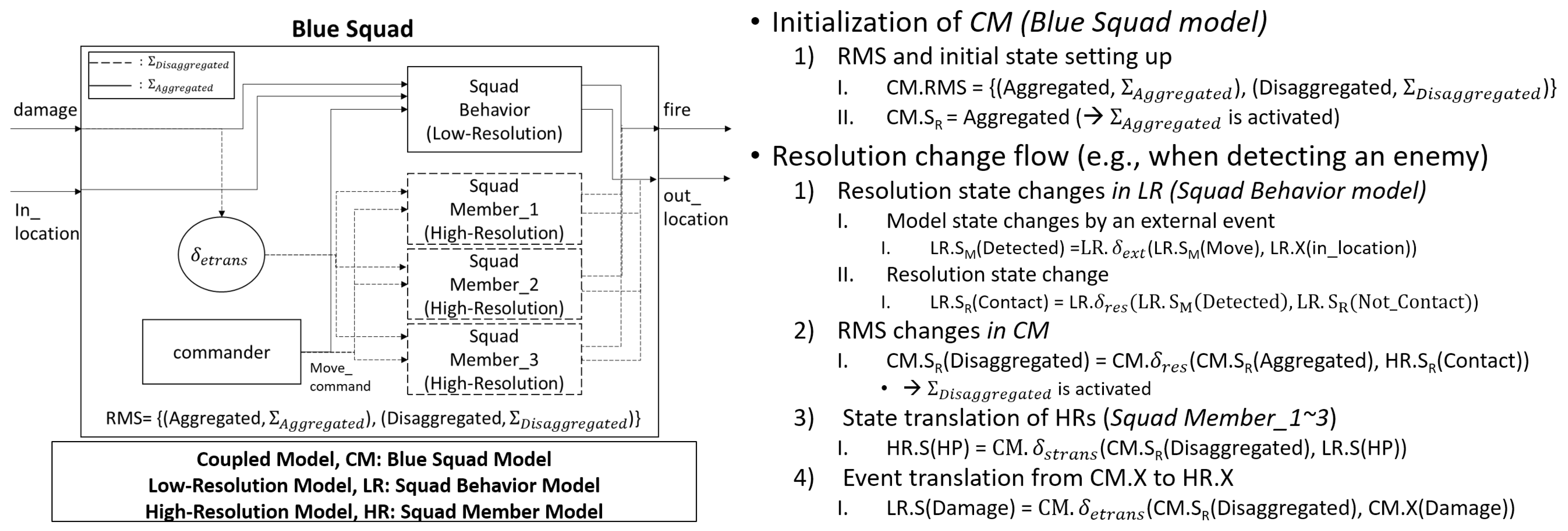
4. Case Study
4.1. Illustrative Example in MRT-DEVS
4.2. Progress of Model Resolution Changes
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zeigler, B.P.; Praehofer, H.; Kim, T.G. Theory of Modeling and Simulation: Integrating Discrete Event and Continuous Complex Dynamic Systems; Academic Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Macal, C.M. Agent-based modeling and artificial life. In Complex Social and Behavioral Systems: Game Theory and Agent-Based Models; Springer: Berilin, Germany, 2020; pp. 725–745. [Google Scholar]
- Rainey, L.B. Introduction and Overview for Engineering Emergence: A Modeling and Simulation Approach. In Engineering Emergence; CRC Press: Boca Raton, FL, USA, 2018; pp. 3–10. [Google Scholar]
- Parry, H.R. Agent-based modeling, large-scale simulations. In Complex Social and Behavioral Systems: Game Theory and Agent-Based Models; Springer: Berilin, Germany, 2020; pp. 913–926. [Google Scholar]
- Bae, J.W.; Moon, I.C. LDEF formalism for agent-based model development. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 793–808. [Google Scholar] [CrossRef]
- Lee, K.; Lee, G.; Rabelo, L. A systematic review of the multi-resolution modeling (MRM) for integration of live, virtual, and constructive systems. Information 2020, 11, 480. [Google Scholar] [CrossRef]
- Maffeo, C.; Aksimentiev, A. MrDNA: A multi-resolution model for predicting the structure and dynamics of DNA systems. Nucleic Acids Res. 2020, 48, 5135–5146. [Google Scholar] [CrossRef] [PubMed]
- Khan, H.; Bazaz, M.A.; Nahvi, S.A. Adaptive multi-resolution framework for fast simulation of power electronic circuits. IET Circuits Devices Syst. 2020, 14, 537–546. [Google Scholar] [CrossRef]
- Fishwick, P.A. The role of process abstraction in simulation. IEEE Trans. Syst. Man Cybern. 1988, 18, 18–39. [Google Scholar] [CrossRef]
- Hong, S.Y.; Kim, T.G. A resolution converter for multi-resolution modeling/simulation on HLA/RTI. In Systems Modeling and Simulation; Springer: Berlin, Germany, 2007; pp. 289–293. [Google Scholar]
- Baohong, L. A formal description specification for multi-resolution modeling based on DEVS formalism and its applications. J. Def. Model. Simul. 2007, 4, 229–251. [Google Scholar] [CrossRef]
- Wei, L.; Wenjia, Z.; Heming, Z. Cross Level Switching Technology for Multi-resolution Model of Complex Products. J. Syst. Simul. 2022, 34, 944. [Google Scholar]
- Wang, Y.; Qu, Q.; Yao, Y. Research on a Model Preaggregation Method for Multi-resolution Modeling. In Proceedings of the 2nd International Conference on Artificial Intelligence and Advanced Manufacture, Manchester, UK, 15–17 October 2020; pp. 155–158. [Google Scholar]
- Schiller, M.; Dupius, M.; Krajzewicz, D.; Kern, A.; Knoll, A. Multi-resolution traffic simulation for large-scale high-fidelity evaluation of VANET applications. In Simulating Urban Traffic Scenarios; Springer: Berlin, Germany, 2019; pp. 17–36. [Google Scholar]
- Liu, B.; Verbraeck, A. Multi-resolution modeling based on quotient space and DEVS. Simul. Model. Pract. Theory 2017, 70, 36–51. [Google Scholar] [CrossRef]
- Moon, I.C.; Hong, J.H. Theoretic interplay between abstraction, resolution, and fidelity in model information. In Proceedings of the 2013 Winter Simulation Conference (WSC), Washington, DC, USA, 8–11 December 2013; pp. 1283–1291. [Google Scholar]
- Mitchell, B.; Yilmaz, L. Symbiotic adaptive multisimulation: An autonomic simulation framework for real-time decision support under uncertainty. ACM Trans. Model. Comput. Simul. (TOMACS) 2009, 19, 1–31. [Google Scholar] [CrossRef]
- Benjamin, P.; Erraguntla, M.; Delen, D.; Mayer, R. Simulation modeling at multiple levels of abstraction. In Proceedings of the 1998 Winter Simulation Conference, Proceedings (Cat. No. 98CH36274), Washington, DC, USA, 13–16 December 1998; Volume 1, pp. 391–398. [Google Scholar]
- Davis, P.K.; Bigelow, J.H. Experiments in Multiresolution Modeling (MRM); Technical Report; Rand Corp.: Santa Monica, CA, USA, 1998. [Google Scholar]
- Davis, P.K.; Huber, R.K. Variable-Resolution Combat Modeling: Motivations, Issues, and Principles; Technical Report; Rand Corp.: Santa Monica, CA, USA, 1992. [Google Scholar]
- Rauscher, S.A.; Ringler, T.D.; Skamarock, W.C.; Mirin, A.A. Exploring a global multiresolution modeling approach using aquaplanet simulations. J. Clim. 2013, 26, 2432–2452. [Google Scholar] [CrossRef]
- Jeschke, M.; Uhrmacher, A.M. Multi-resolution spatial simulation for molecular crowding. In Proceedings of the 2008 Winter Simulation Conference, Miami, FL, USA, 7–10 December 2008; pp. 1384–1392. [Google Scholar]
- Tan, G.; Ng, W.N.; Moradi, F. Aggregation/disaggregation in HLA multi-resolution distributed simulation. In Proceedings of the IEEE/ACM International Symposium on Distributed Simulation and Real Time Applications, Cincinnati, OH, USA, 13–15 August 2001; p. 0076. [Google Scholar]
- Zeigler, B.P.; Kim, D. Multi-resolution modeling for adaptive UAV service systems. In Proceedings of the 2019 Spring Simulation Conference (SpringSim), Tucson, AZ, USA, 29 April–2 May 2019; pp. 1–12. [Google Scholar]
- Yoon, K.; Lee, W.; Croce, P.; Cammalleri, A.; Yoo, S.S. Multi-resolution simulation of focused ultrasound propagation through ovine skull from a single-element transducer. Phys. Med. Biol. 2018, 63, 105001. [Google Scholar] [CrossRef]
- Ringler, T.; Petersen, M.; Higdon, R.L.; Jacobsen, D.; Jones, P.W.; Maltrud, M. A multi-resolution approach to global ocean modeling. Ocean. Model. 2013, 69, 211–232. [Google Scholar] [CrossRef]
- Choi, S.H.; Lee, S.J.; Kim, T.G. Multi-fidelity modeling & simulation methodology for simulation speed up. In Proceedings of the 2nd ACM SIGSIM Conference on Principles of Advanced Discrete Simulation, Denver, CO, USA, 18–21 May 2014; pp. 139–150. [Google Scholar]
- Drewry, D.T.; Reynolds, P.F.; Emanuel, W.R. An optimization-based multi-resolution simulation methodology. In Proceedings of the Winter Simulation Conference, San Diego, CA, USA, 8–11 December 2002; Volume 1, pp. 467–475. [Google Scholar]
- Natrajan, A.; Reynolds, P.F., Jr.; Srinivasan, S. MRE: A flexible approach to multi-resolution modeling. ACM Sigsim Simul. Dig. 1997, 27, 156–163. [Google Scholar] [CrossRef]
- Reynolds, P.F., Jr.; Natrajan, A.; Srinivasan, S. Consistency maintenance in multiresolution simulation. ACM Trans. Model. Comput. Simul. (TOMACS) 1997, 7, 368–392. [Google Scholar] [CrossRef]
- Gholami, S. Combined DEVS multiresolution simulation and model checking. In Proceedings of the 2017 Winter Simulation Conference (WSC), Las Vegas, NV, USA, 3–6 December 2017; pp. 4646–4647. [Google Scholar]
- Goo, B.; Chung, H.; Han, S. Layered discrete event system specification for a ship production scheduling model. Simul. Model. Pract. Theory 2019, 96, 101934. [Google Scholar] [CrossRef]
- Hong, S.Y.; Kim, T.G. Specification of multi-resolution modeling space for multi-resolution system simulation. Simulation 2013, 89, 28–40. [Google Scholar] [CrossRef]
- Barros, F.J. Modeling formalisms for dynamic structure systems. ACM Trans. Model. Comput. Simul. (TOMACS) 1997, 7, 501–515. [Google Scholar] [CrossRef]
- Lee, W.B.; Kim, T.G. Performance evaluation of concurrent system using formal model: Simulation speedup. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2003, 86, 2755–2766. [Google Scholar]
- Bae, J.W.; Bae, S.W.; Moon, I.C.; Kim, T.G. Efficient flattening algorithm for hierarchical and dynamic structure discrete event models. ACM Trans. Model. Comput. Simul. (TOMACS) 2016, 26, 1–25. [Google Scholar] [CrossRef]
- Muzy, A.; Nutaro, J.J. Algorithms for efficient implementations of the DEVS & DSDEVS abstract simulators. In Proceedings of the 1st Open International Conference on Modeling & Simulation (OICMS), Clermont-Ferrand, France, 12–15 June 2005; pp. 273–279. [Google Scholar]
- Kwon, S.J.; Kim, T.G. Design and implementation of event-based DEVS execution environment for faster execution of iterative simulation. In Proceedings of the SpringSim (TMS-DEVS), Orlando, FL, USA, 26–29 March 2012; p. 14. [Google Scholar]
- Fishwick, P.A. DEVS Formalism for Modeling of Discrete-Event Systems. In Handbook of Dynamic System Modeling; Chapman and Hall/CRC: Boca Raton, FL, USA, 2007; pp. 107–120. [Google Scholar]
- Robinson, S.; Nance, R.E.; Paul, R.J.; Pidd, M.; Taylor, S.J. Simulation model reuse: Definitions, benefits and obstacles. Simul. Model. Pract. Theory 2004, 12, 479–494. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| MRM Features | Baohong’s | Hong’s | MRT-DEVS |
|---|---|---|---|
| Resolution State | r | ||
| Resolution Model Family | |||
| Model Structure Function/Info | |||
| Model State Translation Function | - | ||
| Event Conversion Function | |||
| Resolution Change Event Structure | - | (Embedded in simulation algorithm) | |
| Resolution Change Controller | (Embedded in simulation algorithm) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, J.W.; Moon, I.-C. Practical Formalism-Based Approaches for Multi-Resolution Modeling and Simulation. Systems 2022, 10, 174. https://doi.org/10.3390/systems10050174
Bae JW, Moon I-C. Practical Formalism-Based Approaches for Multi-Resolution Modeling and Simulation. Systems. 2022; 10(5):174. https://doi.org/10.3390/systems10050174
Chicago/Turabian StyleBae, Jang Won, and Il-Chul Moon. 2022. "Practical Formalism-Based Approaches for Multi-Resolution Modeling and Simulation" Systems 10, no. 5: 174. https://doi.org/10.3390/systems10050174
APA StyleBae, J. W., & Moon, I.-C. (2022). Practical Formalism-Based Approaches for Multi-Resolution Modeling and Simulation. Systems, 10(5), 174. https://doi.org/10.3390/systems10050174