
Ceramic–Titanium Alloy Artificial Hip Joint Wear Simulation and Experimental Study

Abstract
:1. Introduction
2. Mechanism of Wear Erosion
2.1. Motion Analysis of the Human Hip Joint
2.2. Based on Archard’s Wear Prediction Model
3. Development of Hip Joint Model and Wear Simulation Analysis
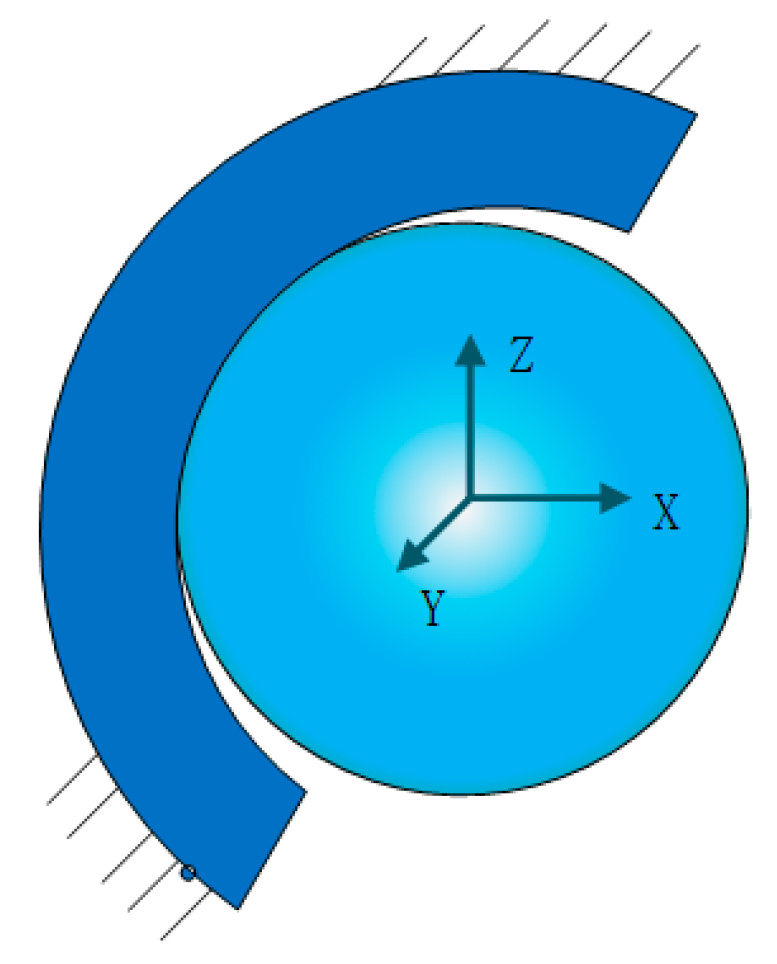
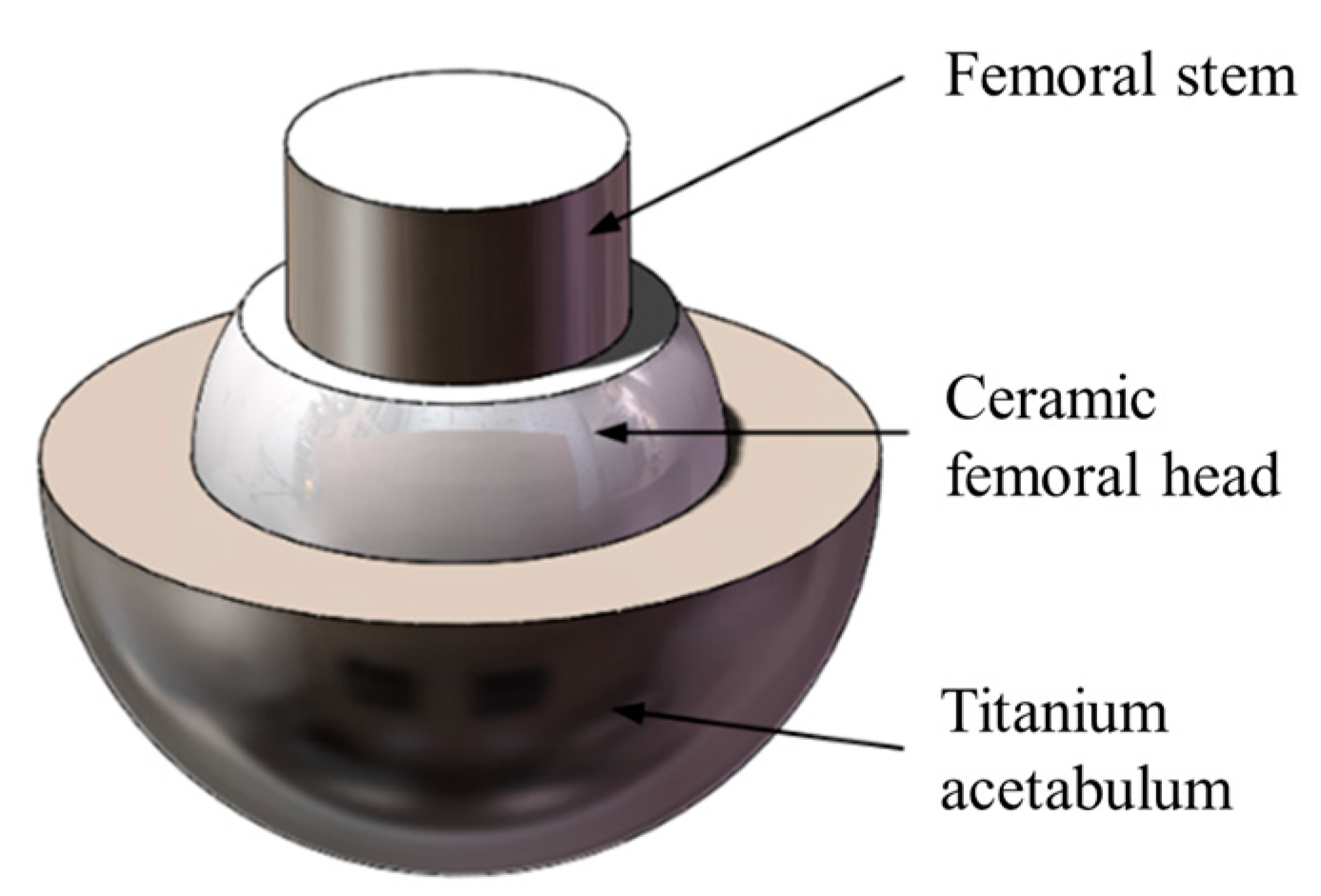
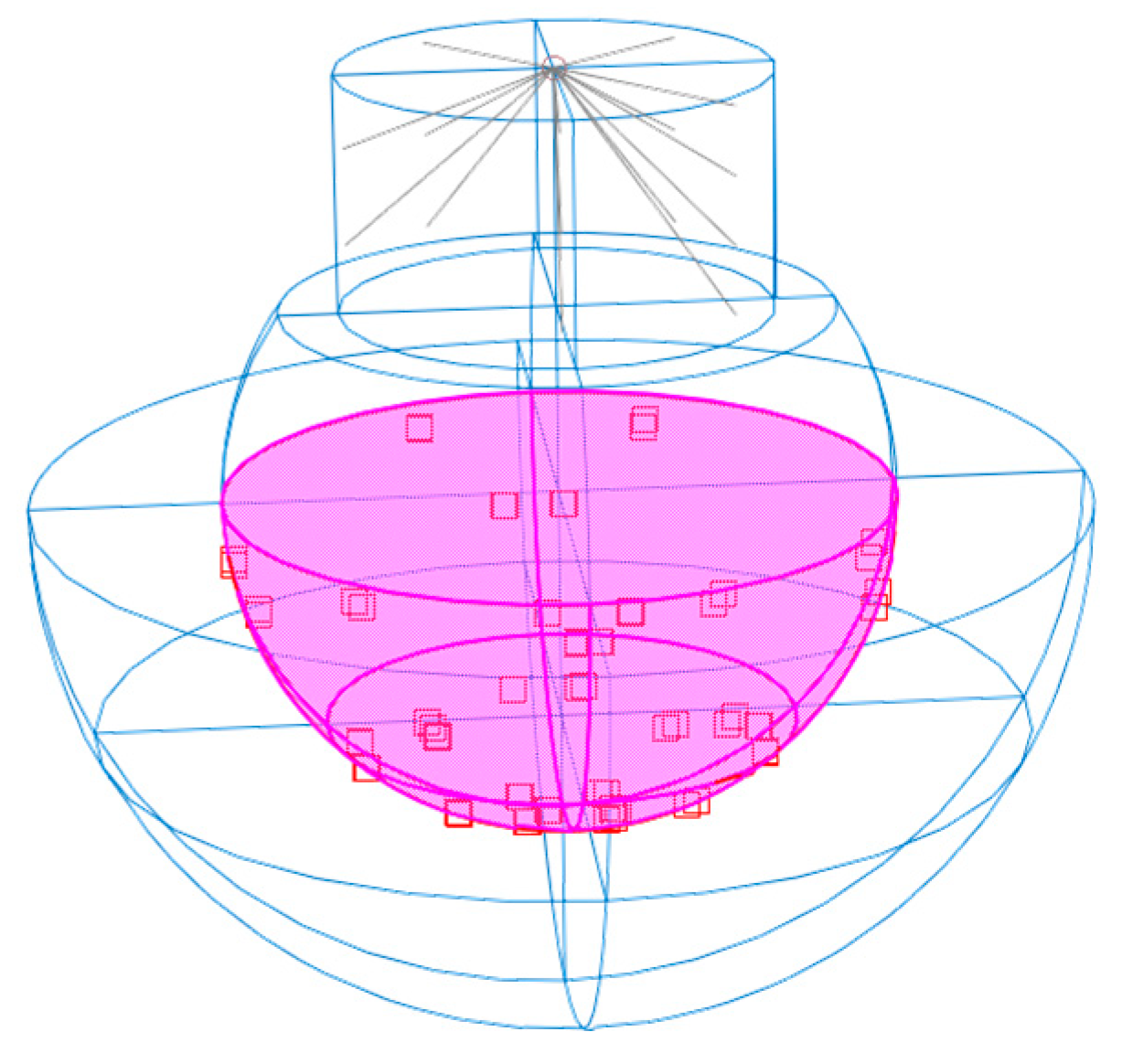
3.1. Development of Hip Joint Model
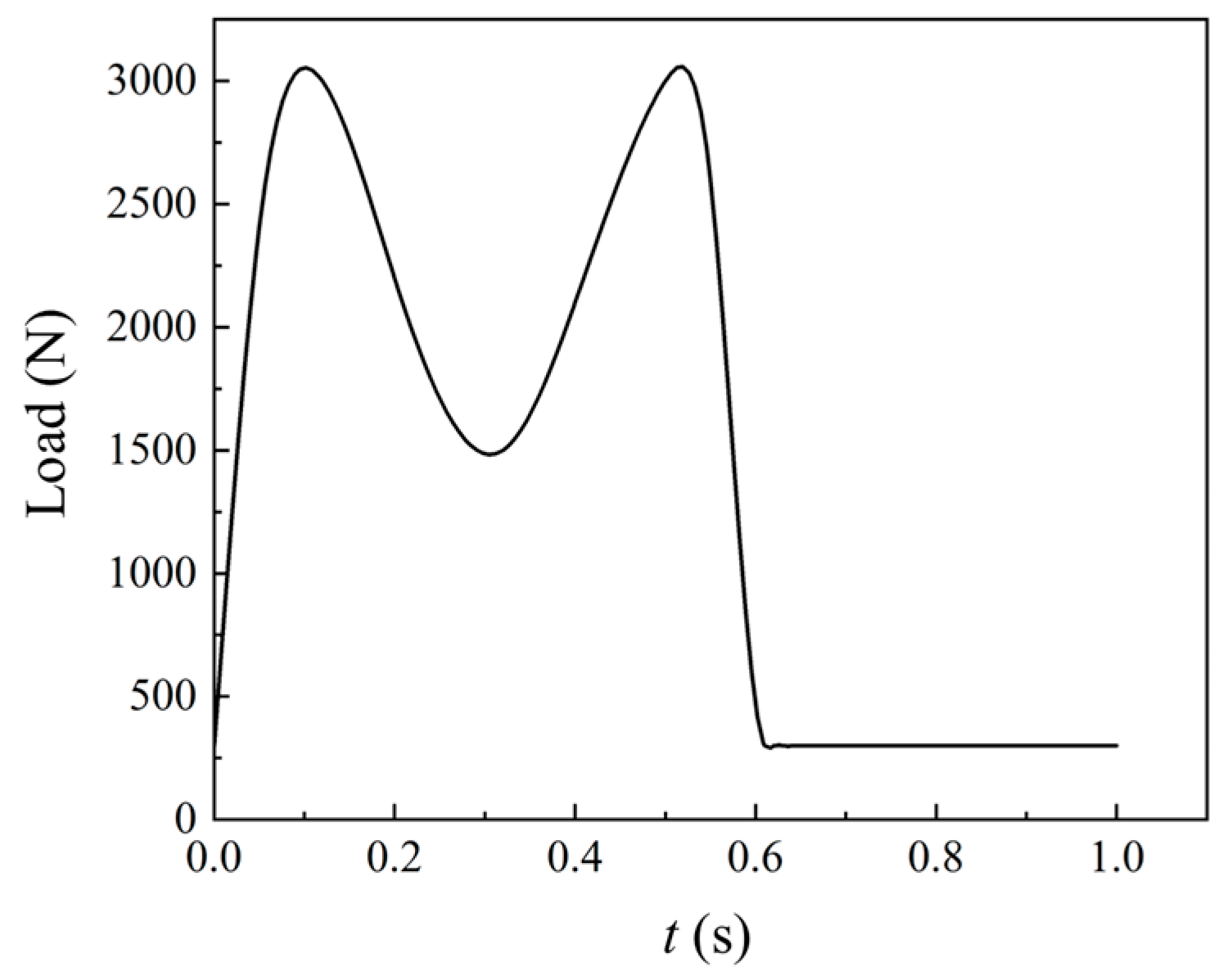
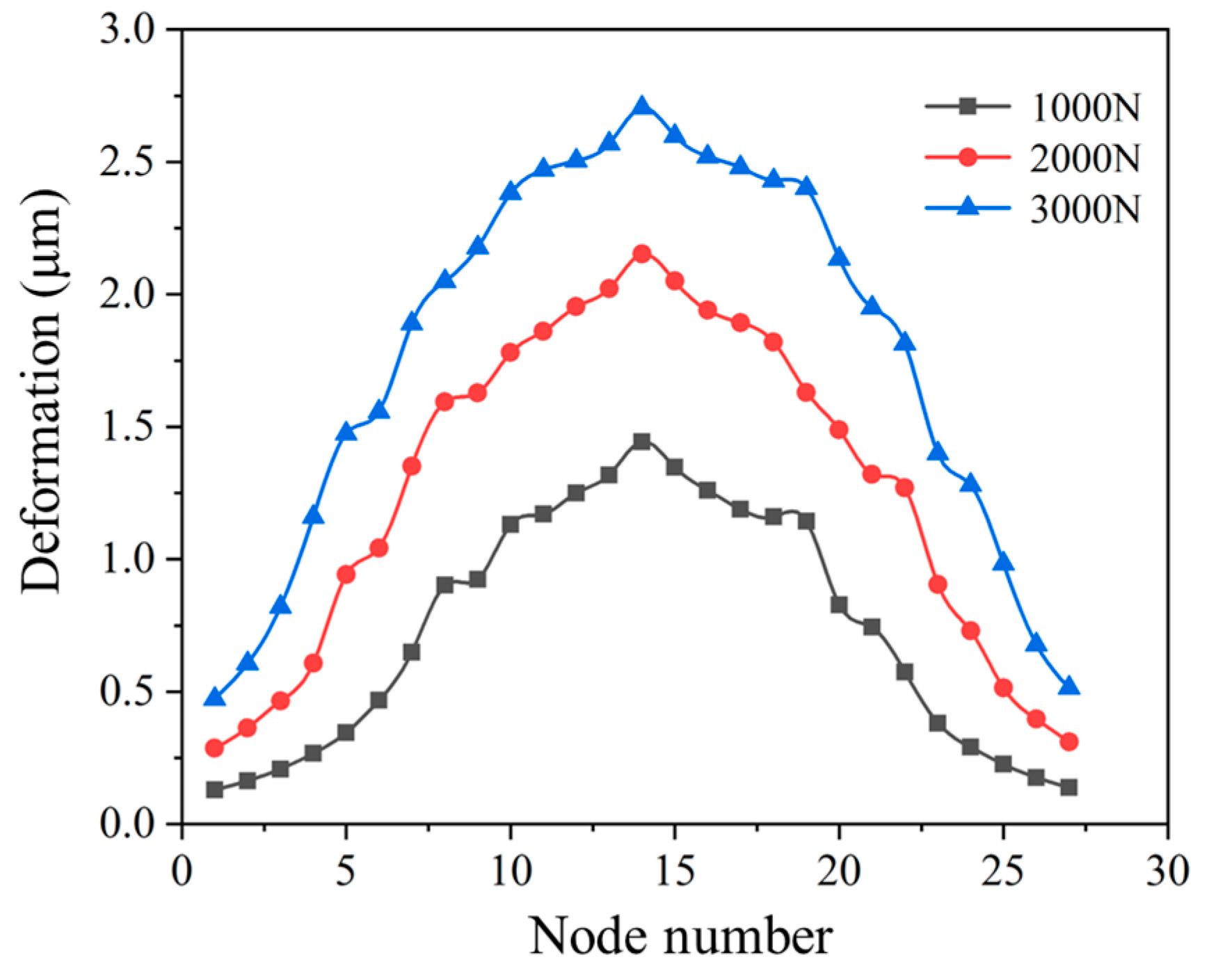
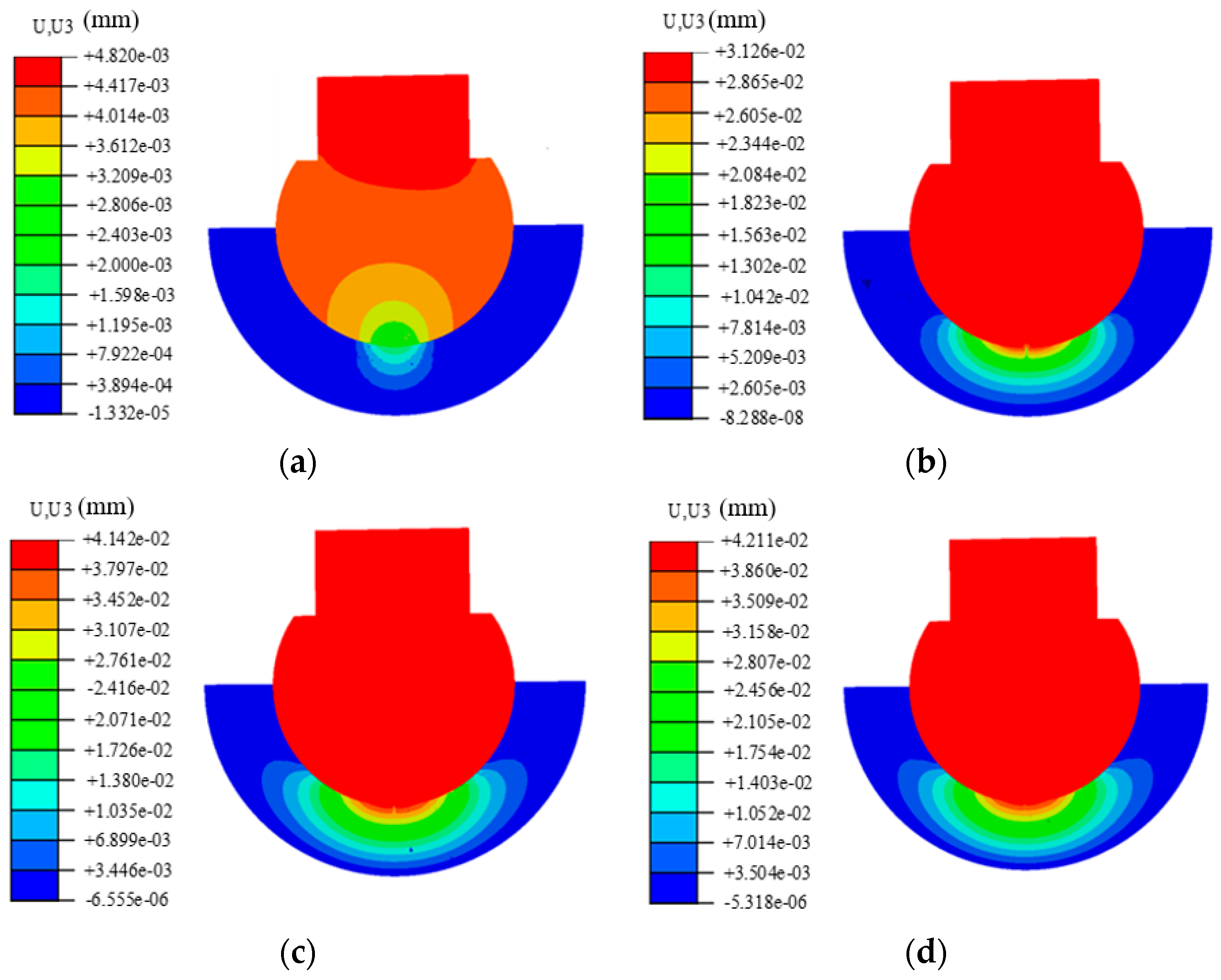
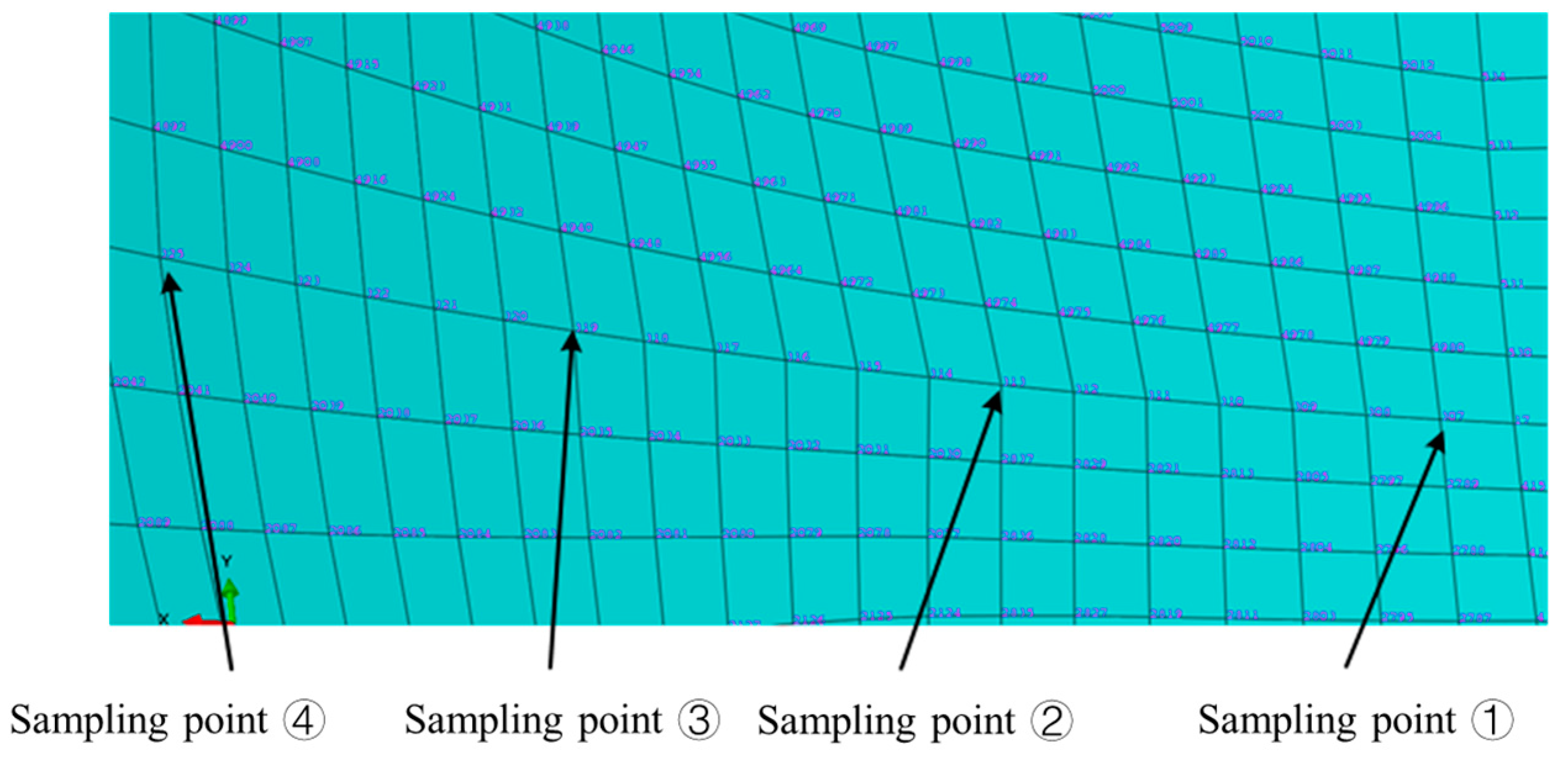
3.2. The Stress and Deformation under Different Loads
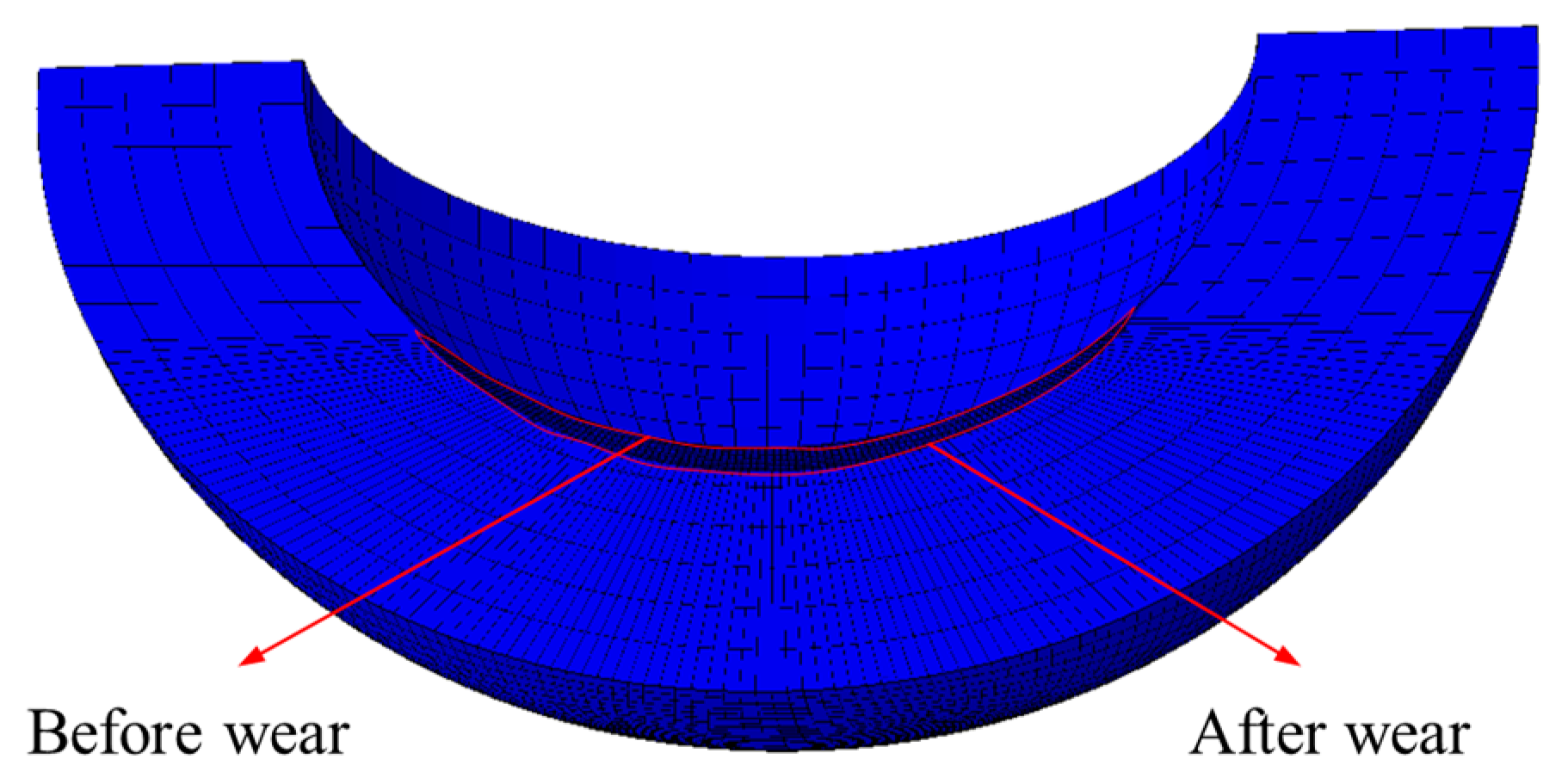
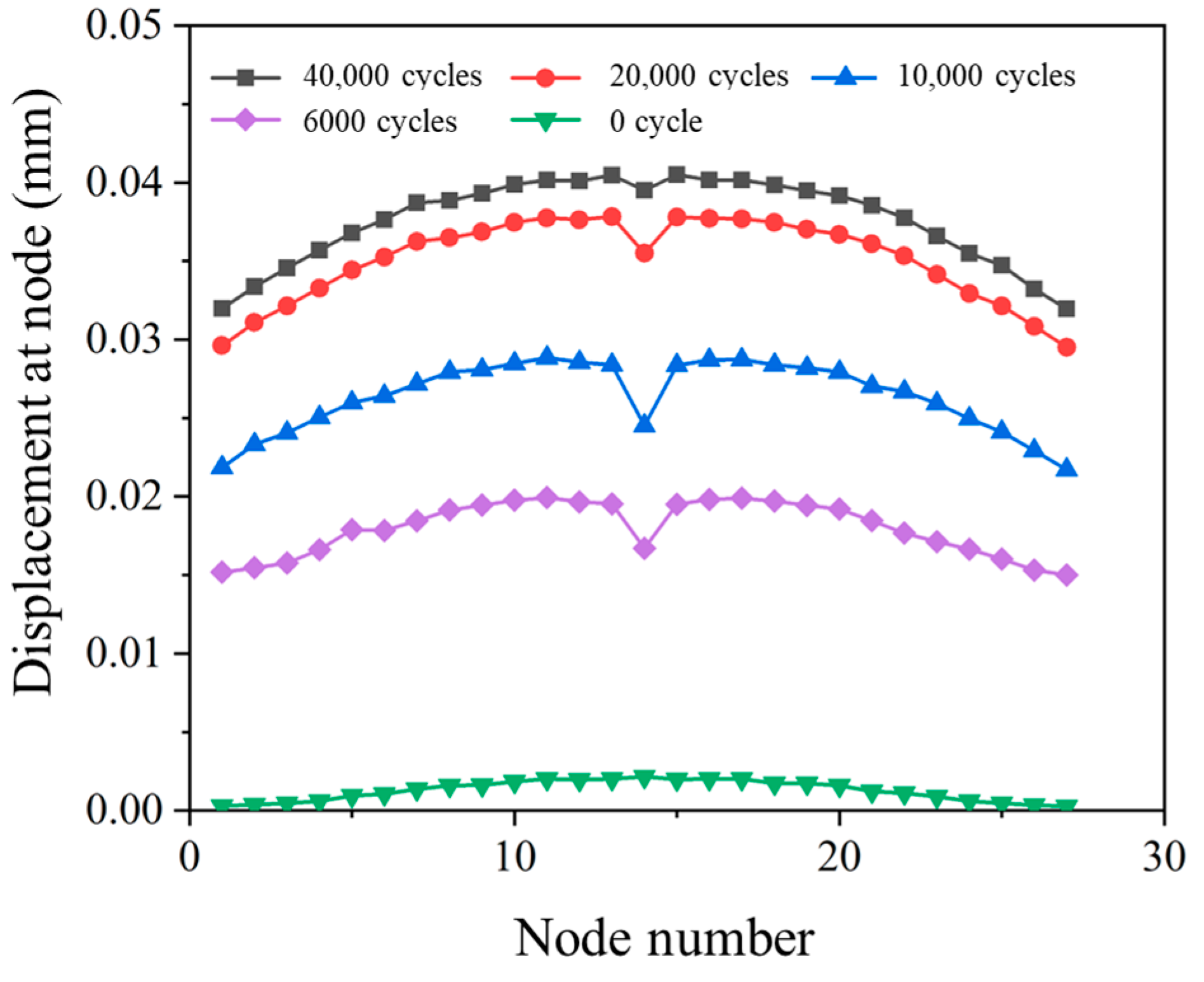
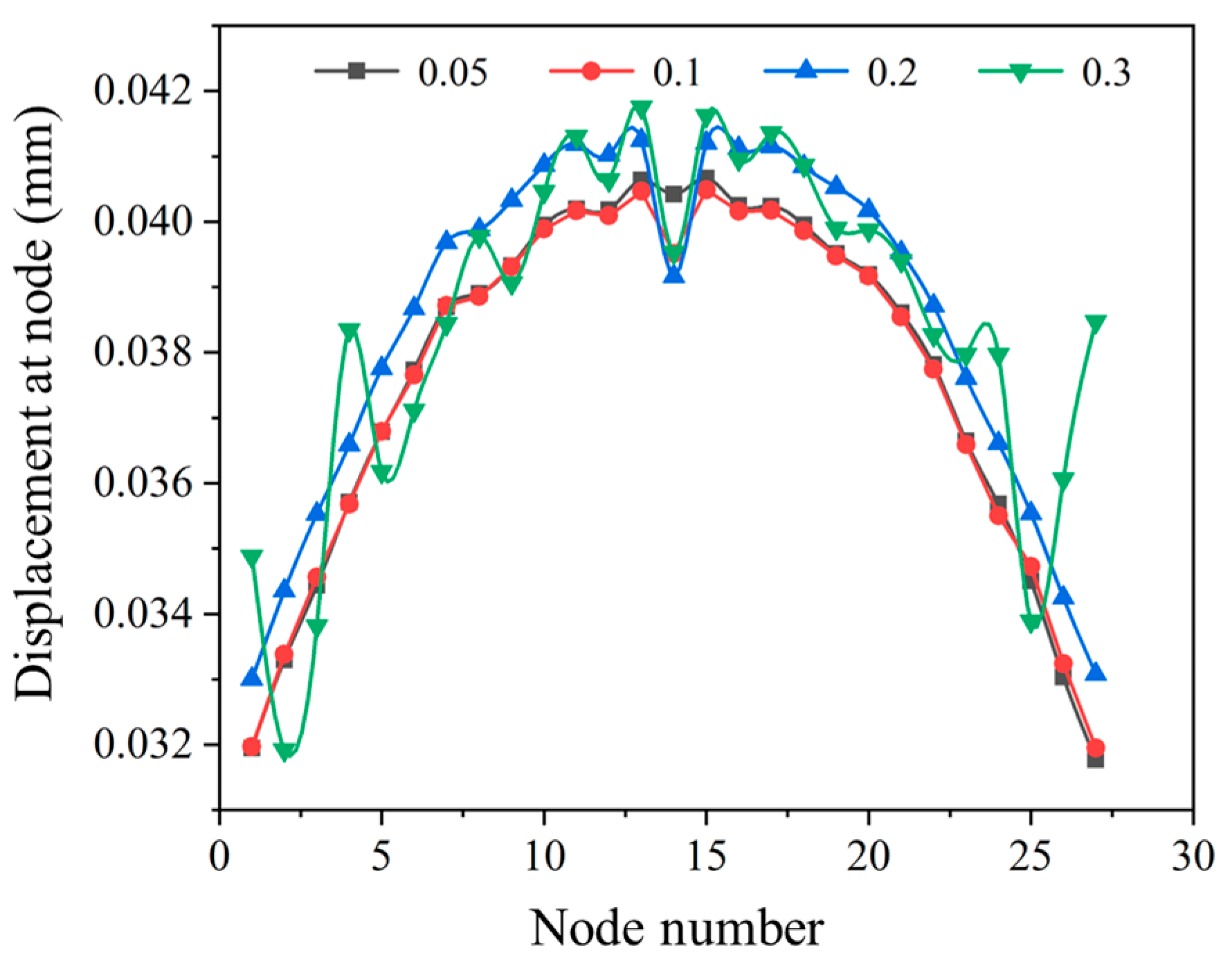
3.3. Effects on Wear Depth
4. Experiment and Results Discussion
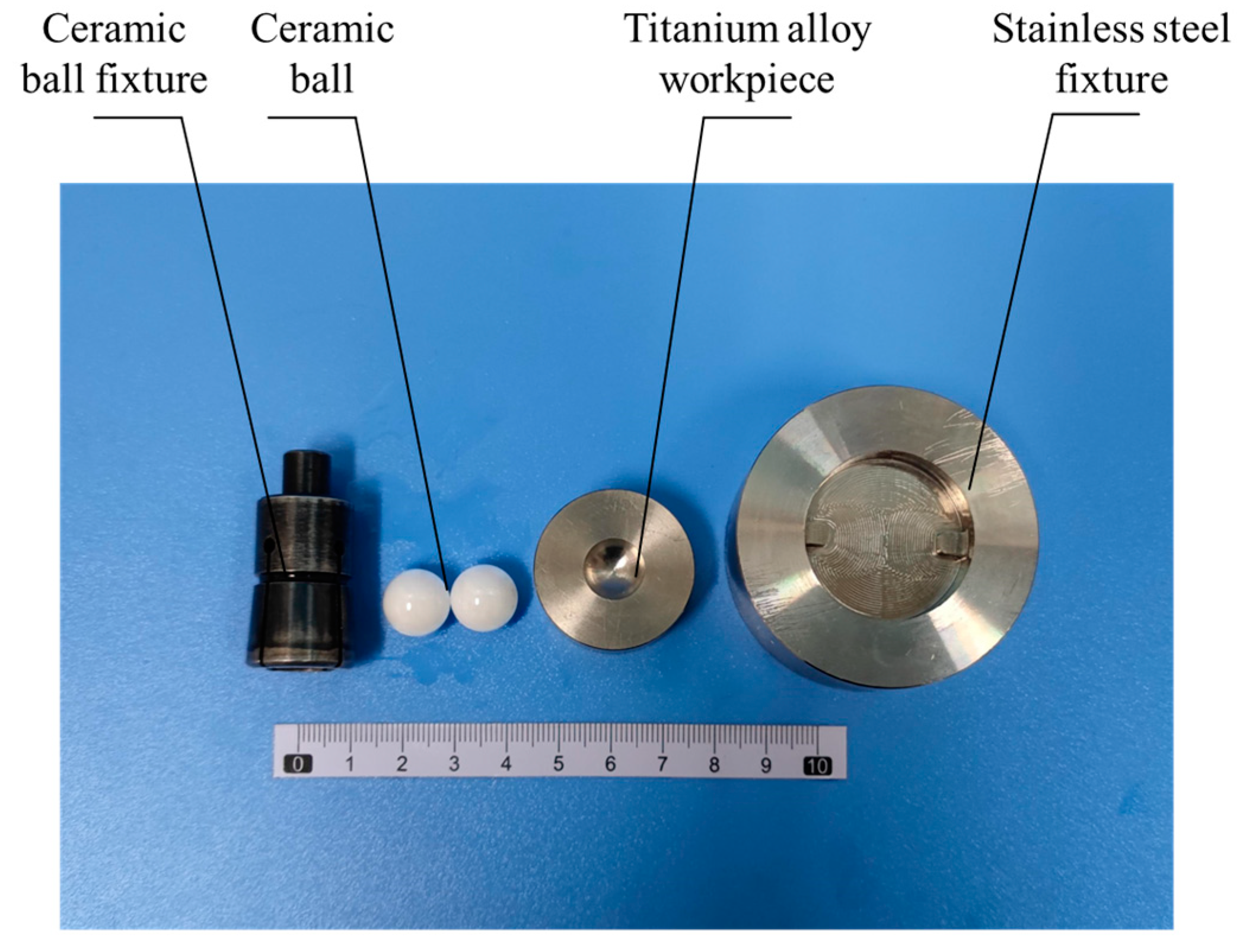
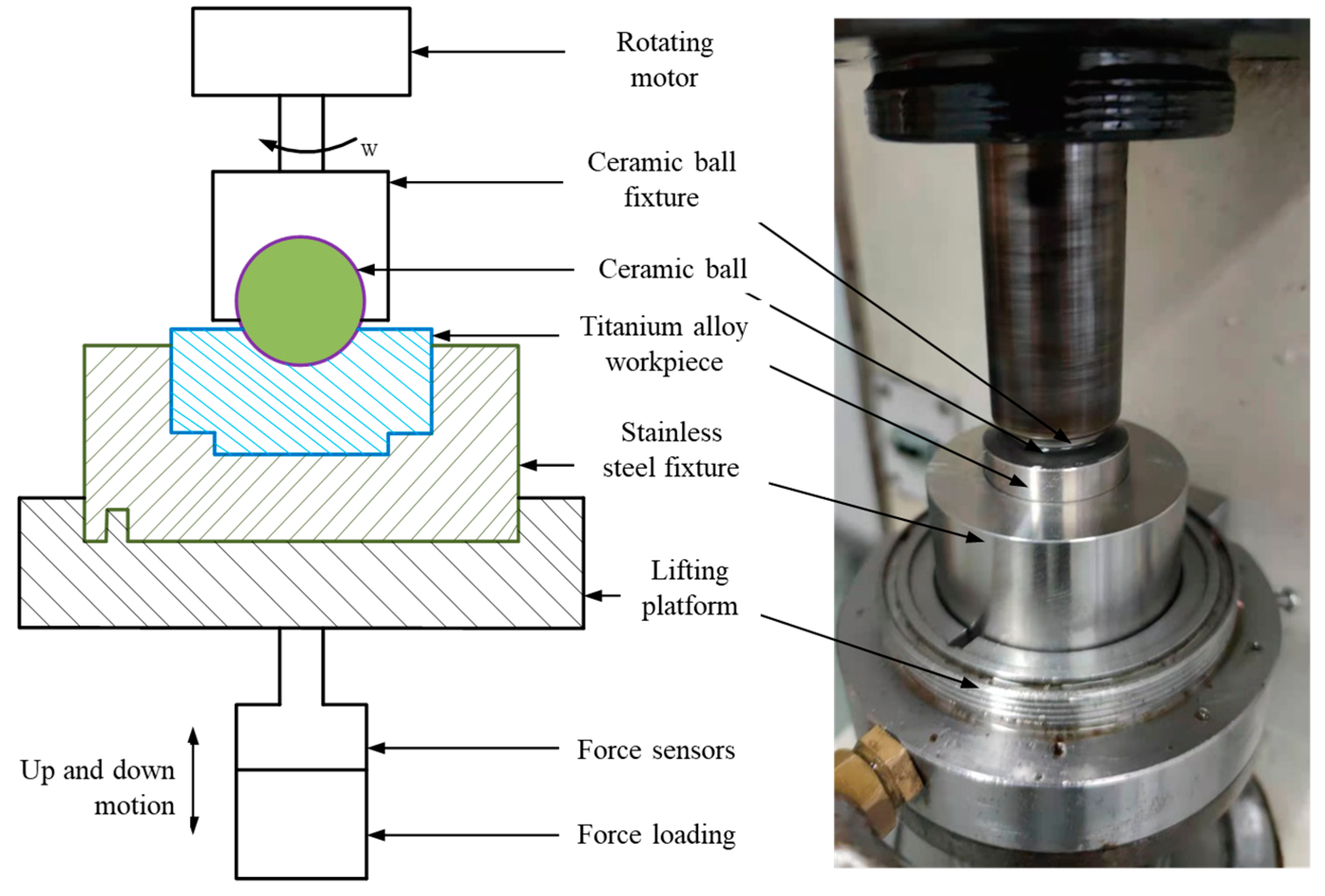
4.1. Experimental Work
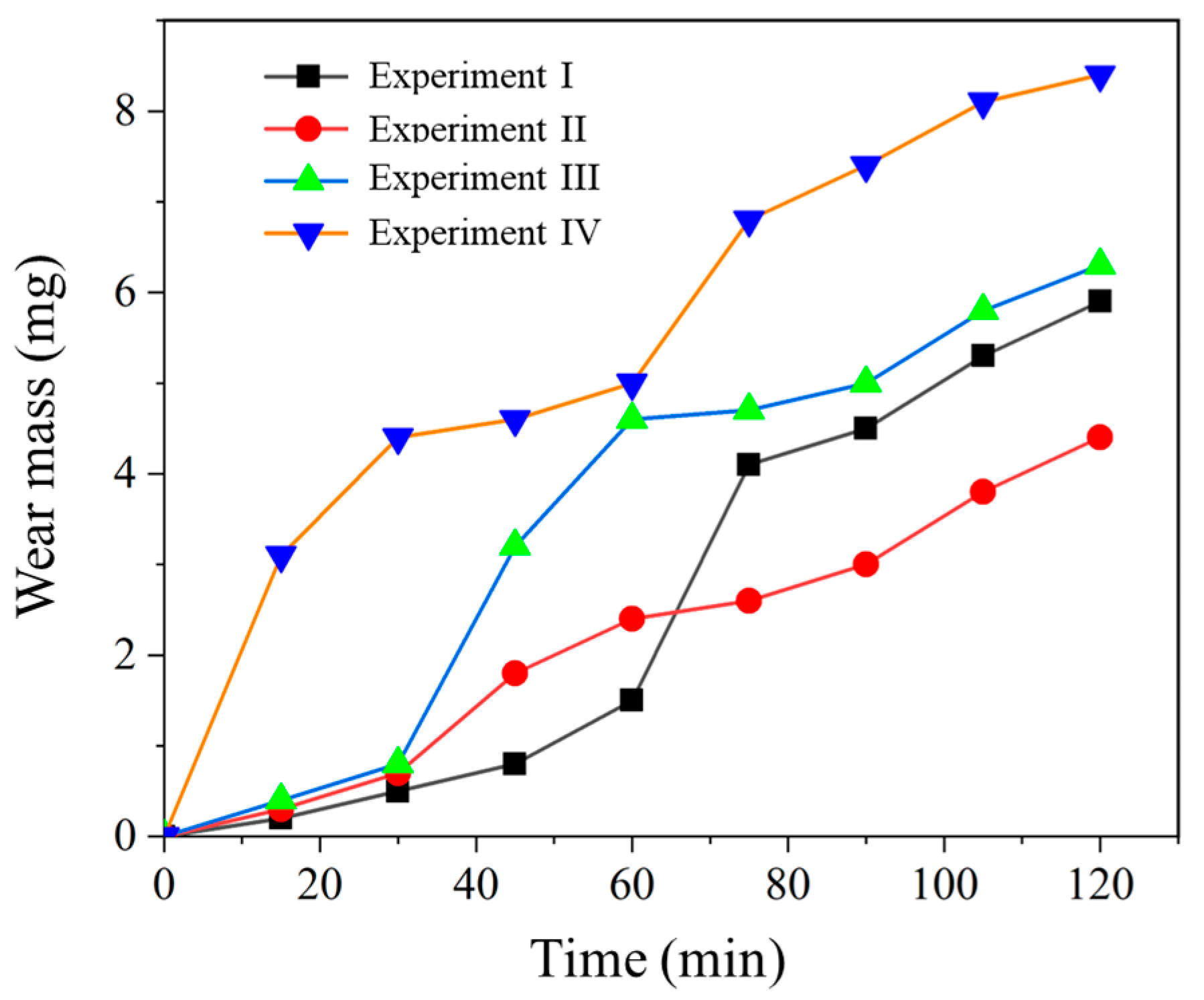
4.2. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Murakami, T. 2–Biomechanics of human and artificial joints. In Biotribology of Natural and Artificial Joints; Murakami, T., Ed.; Elsevier: Amsterdam, The Netherlands, 2023; pp. 29–79. [Google Scholar]
- Dimitroulis, G. Comparison of the outcomes of three surgical treatments for end-stage temporomandibular joint disease. Int. J. Oral Maxillofac. Surg. 2014, 43, 980–989. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Yuan, Z.; Qi, Z.; Cai, D.; Cheng, Z.; Qi, H. CFD-based study of the abrasive flow characteristics within constrained flow passage in polishing of complex titanium alloy surfaces. Powder Technol. 2018, 333, 209–218. [Google Scholar] [CrossRef]
- Nunez, E.E.; Polycarpou, A.A.; Economy, J. Tribological studies of a novel high-performance aromatic thermosetting copolyester containing carbon nanotubes for artificial hip joints. Tribol. Int. 2023, 178, 108038. [Google Scholar] [CrossRef]
- Williams, S.; Jalali-Vahid, D.; Brockett, C.; Jin, Z.; Stone, M.H.; Ingham, E.; Fisher, J. Effect of swing phase load on metal-on-metal hip lubrication, friction and wear. J. Biomech. 2006, 39, 2274–2281. [Google Scholar] [CrossRef]
- Zhang, L.; Yuan, Z.; Tan, D.; Huang, Y. An Improved Abrasive Flow Processing Method for Complex Geometric Surfaces of Titanium Alloy Artificial Joints. Appl. Sci. 2018, 8, 1037. [Google Scholar]
- Zhang, L.; Wang, J.-S.; Tan, D.-P.; Yuan, Z.-M. Gas compensation-based abrasive flow processing method for complex titanium alloy surfaces. Int. J. Adv. Manuf. Technol. 2017, 92, 3385–3397. [Google Scholar] [CrossRef]
- Okutani, Y.; Goto, K.; Kuroda, Y.; Kawai, T.; Okuzu, Y.; Kawata, T.; Shimizu, Y.; Matsuda, S. Long-term outcome of cemented total hip arthroplasty with the Charnley-type femoral stem made of titanium alloy. J. Orthop. Sci. 2019, 24, 1047–1052. [Google Scholar] [CrossRef]
- Mattei, L.; Di Puccio, F.; Piccigallo, B.; Ciulli, E. Lubrication and wear modelling of artificial hip joints: A review. Tribol. Int. 2011, 44, 532–549. [Google Scholar] [CrossRef]
- Qian, H.; Chen, M.; Qi, Z.; Teng, Q.; Qi, H.; Zhang, L.; Shan, X. Review on Research and Development of Abrasive Scratching of Hard Brittle Materials and Its Underlying Mechanisms. Crystals 2023, 13, 428. [Google Scholar] [CrossRef]
- Cai, Y.; Li, K.; Li, L.; Hu, J. Anti-friction mechanism of textured artificial joint material under the walking conditions of human. J. Mater. Res. Technol. 2022, 20, 2999–3007. [Google Scholar] [CrossRef]
- Ji, R.; Qi, Z.; Chen, J.; Zhang, L.; Lin, K.; Lu, S.; Li, Y. Numerical and Experimental Investigation on the Abrasive Flow Machining of Artificial Knee Joint Surface. Crystals 2023, 13, 430. [Google Scholar] [CrossRef]
- Cousins, M.M.; Short, E.; Heckman, P.; Narayana, V.; Bryant, A.K.; Hurley, P.; Hearn, J.; McLaughlin, P.W. Prostate radiotherapy in the setting of bilateral hip prostheses: All commonly used photon-based radiation approaches are feasible. Med. Dosim. 2021, 46, 404–410. [Google Scholar] [CrossRef]
- Buj-Corral, I.; Bagheri, A.; Domínguez-Fernández, A. Influence of Structure Support Printing Parameters on Surface Finish of PLA Hemispherical Cups for Emulation of Ceramic Hip Prostheses. Procedia CIRP 2018, 68, 347–351. [Google Scholar] [CrossRef]
- Cilingir, A.C. Finite Element Analysis of the Contact Mechanics of Ceramic-on-Ceramic Hip Resurfacing Prostheses. J. Bionic Eng. 2010, 7, 244–253. [Google Scholar] [CrossRef]
- Askari, E.; Flores, P.; Dabirrahmani, D.; Appleyard, R. A review of squeaking in ceramic total hip prostheses. Tribol. Int. 2016, 93, 239–256. [Google Scholar] [CrossRef]
- Liu, F.; Leslie, I.; Williams, S.; Fisher, J.; Jin, Z. Development of computational wear simulation of metal-on-metal hip resurfacing replacements. J. Biomech. 2008, 41, 686–694. [Google Scholar] [CrossRef]
- Tandler, R.; Bohn, N.; Gabbert, U.; Woschke, E. Analytical wear model and its application for the wear simulation in automotive bush chain drive systems. Wear 2020, 446–447, 203193. [Google Scholar] [CrossRef]
- Federici, M.; Menapace, C.; Moscatelli, A.; Gialanella, S.; Straffelini, G. Effect of roughness on the wear behavior of HVOF coatings dry sliding against a friction material. Wear 2016, 368–369, 326–334. [Google Scholar] [CrossRef]
- Liu, F.; He, Y.; Gao, Z.; Jiao, D. Enhanced computational modelling of UHMWPE wear in total hip joint replacements: The role of frictional work and contact pressure. Wear 2021, 482–483, 203985. [Google Scholar] [CrossRef]
- Yuan, H.; Yang, W.; Zhang, L.; Hong, T. Model Development of Stress Intensity Factor on 7057T6 Aluminum Alloy Using Extended Finite Element Method. Coatings 2023, 13, 581. [Google Scholar] [CrossRef]
- Cheng, Z.; Wang, S.; Wu, G.; Gao, J.; Yang, X.; Wu, H. Tribological properties of high-entropy alloys: A review. Int. J. Miner. Metall. Mater. 2022, 29, 389–403. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, L.; Zhu, L.; Li, Y.; Hong, T.; Yang, W.; Shan, X. State of the Art and Perspectives on Surface-Strengthening Process and Associated Mechanisms by Shot Peening. Coatings 2023, 13, 859. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Z.; Ni, P.; Wang, D.; Lu, Y.; Lu, H.; Guo, S.; Chen, Z. Experimental and Numerical Study on Regulation of Cutting Temperature during the Circular Sawing of 45 Steel. Coatings 2023, 13, 758. [Google Scholar] [CrossRef]
- Sah, A.P. How Much Hip Motion Is Used in Real-Life Activities? Assessment of Hip Flexion by a Wearable Sensor and Implications After Total Hip Arthroplasty. J. Arthroplast. 2022, 37, S871–S875. [Google Scholar] [CrossRef]
- Sun, Y.; Li, Y.; Zhang, Q.; Qin, X.; Chen, K. Wear analysis and simulation of small module gear based on Archard model. Eng. Fail. Anal. 2023, 144, 106990. [Google Scholar] [CrossRef]
- Aghababaei, R.; Zhao, K. Micromechanics of material detachment during adhesive wear: A numerical assessment of Archard’s wear model. Wear 2021, 476, 203739. [Google Scholar] [CrossRef]
- Liu, Y.; Liskiewicz, T.W.; Beake, B.D. Dynamic changes of mechanical properties induced by friction in the Archard wear model. Wear 2019, 428–429, 366–375. [Google Scholar] [CrossRef]
- Qi, H.; Wen, D.; Lu, C.; Li, G. Numerical and experimental study on ultrasonic vibration-assisted micro-channelling of glasses using an abrasive slurry jet. Int. J. Mech. Sci. 2016, 110, 94–107. [Google Scholar] [CrossRef]
- Qi, H.; Wen, D.; Yuan, Q.; Zhang, L.; Chen, Z. Numerical investigation on particle impact erosion in ultrasonic-assisted abrasive slurry jet micro-machining of glasses. Powder Technol. 2017, 314, 627–634. [Google Scholar] [CrossRef]
- Qi, H.; Qin, S.; Cheng, Z.; Teng, Q.; Hong, T.; Xie, Y. Towards understanding performance enhancing mechanism of micro-holes on K9 glasses using ultrasonic vibration-assisted abrasive slurry jet. J. Manuf. Process. 2021, 64, 585–593. [Google Scholar] [CrossRef]
- Qi, H.; Qin, S.; Cheng, Z.; Zou, Y.; Cai, D.; Wen, D. DEM and experimental study on the ultrasonic vibration-assisted abrasive finishing of WC-8Co cemented carbide cutting edge. Powder Technol. 2021, 378, 716–723. [Google Scholar] [CrossRef]
- Qi, H.; Wang, Y.; Qi, Z.; Shi, L.; Fang, Z.; Zhang, L.; Riemer, O.; Karpuschewski, B. A Novel Grain-Based DEM Model for Evaluating Surface Integrity in Scratching of RB-SiC Ceramics. Materials 2022, 15, 8486. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Ji, R.; Fu, Y.; Qi, H.; Kong, F.; Li, H.; Tangwarodomnukun, V. Investigation on particle motions and resultant impact erosion on quartz crystals by the micro-particle laden waterjet and airjet. Powder Technol. 2020, 360, 452–461. [Google Scholar] [CrossRef]
- Zhang, G. Study on Biomechanical and Tribological Properties of Composite Artificial Hip Joint Materials; Qingdao University of Science and Technology: Qingdao, China, 2019. [Google Scholar]
- Kumar, D.; Murthy, K.; Kore, S.D.; Nandy, A. Effect of thread angle besides other process parameters in electromagnetically crimped threaded surfaced tube-to-tube joint: FEM modelling and ANOVA analysis. Mater. Today Proc. 2023. [Google Scholar] [CrossRef]
- Oehlert, G.W. Student–Newman–Kuels controls the false discovery rate. Stat. Probab. Lett. 2000, 46, 381–383. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Density (g/cm3) | Elastic Modulus (MPa) | Poisson Ratio |
|---|---|---|---|
| Titanium | 4.428 | 112,000 | 0.34 |
| Ceramic | 6 | 200,000 | 0.3 |
| Analysis Steps | Type of Steps | Geometric Nonlinearity | Time Duration | Transferred Attribute | Function |
|---|---|---|---|---|---|
| Initial | Initial | N/A | N/A | Transfer | Applying constraint boundary condition |
| Step-1 | Static, generic | ON | 1 | Transfer | Applying full loads |
| Step-2 | Static, generic | ON | 20 | Transfer | Applying motion boundary conditions |
| Formulation | Na+ | K+ | Mg2+ | Ca2+ | Cl− | HCO− | SO42− | HPO42− |
|---|---|---|---|---|---|---|---|---|
| Ion concentrations of body fluid | 142.0 | 5.0 | 1.5 | 2.5 | 103.0 | 27.0 | 1.0 | 0.5 |
| Ion concentrations of SBF | 142.0 | 5.0 | 1.5 | 2.5 | 147.8 | 4.2 | 1.0 | 0.5 |
| Experiment No. | Surface Roughness Ra (nm) | Load (N) | Times Experiment Was Repeated | Wear Mass (mg) |
|---|---|---|---|---|
| I | 60 | 98 | 1 | 5.9 |
| 2 | 5.5 | |||
| 3 | 6.0 | |||
| II | 150 | 98 | 1 | 4.4 |
| 2 | 5.0 | |||
| 3 | 4.2 | |||
| III | 350 | 98 | 1 | 6.5 |
| 2 | 6.0 | |||
| 3 | 5.8 | |||
| IV | 550 | 98 | 1 | 7.9 |
| 2 | 8.4 | |||
| 3 | 7.5 |
| Experiment No. | Total Experimental Time | Subset for α = 0.05 | |||
|---|---|---|---|---|---|
| 1 | 2 | 3 | |||
| S-N-K analysis | II | 3 | 4.8667 | ||
| I | 3 | 5.8000 | |||
| III | 3 | 6.1000 | |||
| IV | 3 | 7.9333 | |||
| Significance | / | 1.00 | 0.362 | 1.00 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, R.; Chen, F.; Ying, R.; Zhang, L. Ceramic–Titanium Alloy Artificial Hip Joint Wear Simulation and Experimental Study. Coatings 2023, 13, 1321. https://doi.org/10.3390/coatings13081321
Ji R, Chen F, Ying R, Zhang L. Ceramic–Titanium Alloy Artificial Hip Joint Wear Simulation and Experimental Study. Coatings. 2023; 13(8):1321. https://doi.org/10.3390/coatings13081321
Chicago/Turabian StyleJi, Renquan, Fei Chen, Rongmin Ying, and Li Zhang. 2023. "Ceramic–Titanium Alloy Artificial Hip Joint Wear Simulation and Experimental Study" Coatings 13, no. 8: 1321. https://doi.org/10.3390/coatings13081321
APA StyleJi, R., Chen, F., Ying, R., & Zhang, L. (2023). Ceramic–Titanium Alloy Artificial Hip Joint Wear Simulation and Experimental Study. Coatings, 13(8), 1321. https://doi.org/10.3390/coatings13081321