
Research on Insulator Defect Detection Based on Improved YOLOv7 and Multi-UAV Cooperative System
 and
and
Abstract
1. Introduction
- (1)
- We construct a high-performance multi-UAV platform. Object detection and positioning can be completed on the computer, and the performance requirements and energy consumption of the UAV are reduced. In addition, multiple UAVs can be carried through the open design of the platform.
- (2)
- We propose an insulator defect detection model based on improved YOLOv7, including YOLOv7-C3C2 and YOLOv7-C3C2-GAM. Regarding the improvement strategy, the C3C2 module is introduced to replace the Catconv module of YOLOv7, the two sets of E-ELAN in the backbone network are replaced with lightweight CNeB2 modules, and the speed and accuracy of the feature extraction were improved. In addition, the global attention mechanism (GAM) with superior performance is introduced into the head of YOLOv7, and the key feature information of small targets and occlusion targets is well paid attention to, which improves the detection accuracy of small targets and occlusion targets. Through the combination of a multi-UAV collaborative system and improved YOLOv7, the error detection problems caused by lighting and complex backgrounds have been improved, and the speed and reliability have been improved significantly.
- (3)
- To improve the reliability of the model, we build an insulator defect dataset, which contains most common insulator defect images, insulator self-blasts, cracked insulators, and bird nest interferences.
2. Related Works
3. The Proposed Materials and Methods
3.1. Multi-UAV Collaboration Platform
- (1)
- Division of search area for multi-UAV. If we take a single 4G or 5G signal base station as the reference center, the initial search area can be determined effectively. Centered on the base station of the last communication device, the area with the radius of the maximum moving distance of a person is the initial search area. Each UAV searches outward from the center gradually, and the flight path is prescribed a parallel grid or arc grid. Once the search range is determined, we divide the flight tasks based on the maximum flight distance and camera’s view angle for each UAV. Ultimately, UAVs with the farthest distances can arrange more grid search areas, and UAVs with smaller views can arrange higher missions to match low-altitude UAVs. In this way, the safety and search reliability of UAV are guaranteed.
- (2)
- High-voltage line inspection path planning. Complex terrain will affect the autonomous flight of the UAV in the high-voltage line inspection. To make the map display contour lines, we load the Digital Elevation Model (DEM) into the Map module. In addition, by a certain height above the contour line (20~30 m) to plan the line waypoint task, the lifting requirements of UAVs have been reduced, and the stability and efficiency of search have been significantly improved.
- (3)
- Marking of the inspection area. We abstract the camera’s view angle into a convex quad to mark the search area of each UAV, which avoids omissions and duplications of the search area. As the information of the UAV is discrete, each calculated polygon needs to be added to the polygons in the search area.
- (4)
- Target positioning. To locate the detected target in the video, such as cracked insulators or bird nests, we used a homologous video stream and some parameters from the UAV to obtain a correspondence between the pixel coordinate system and the two sets of points in WGS84. The detailed steps can be found in our paper [40].
- (5)
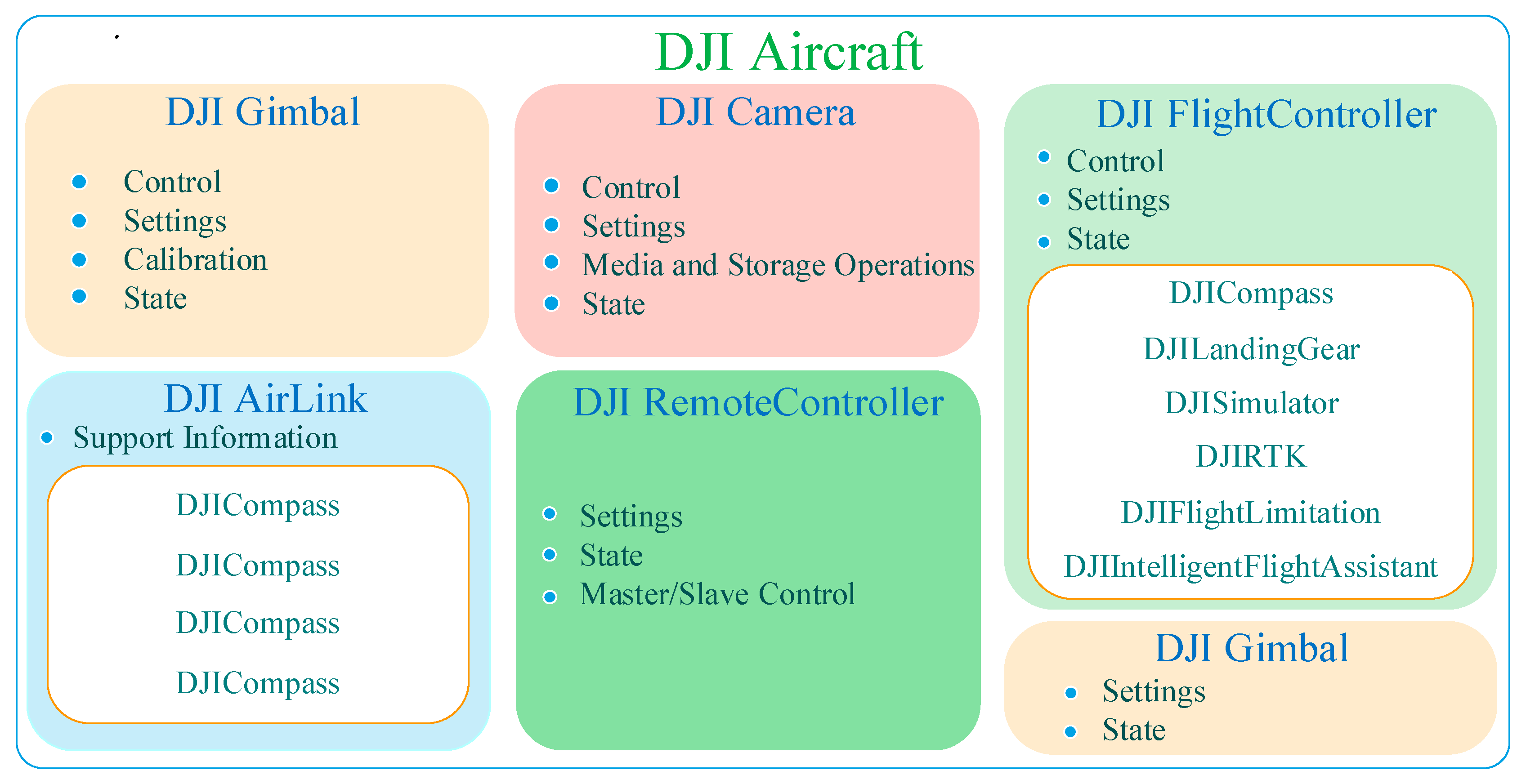
- Preliminary Test of multi-UAV Collaborative Platform. To verify the multi-UAVs’ cooperation performance, we build a test platform through two DJI Mavic 2 Pro UAVs, shown in Figure 2.
3.2. Improved YOLOv7 Detection Model
3.2.1. YOLOv7 Model
3.2.2. Improved YOLOv7 Model
- (1)
- Network Structure. The improved YOLOv7 network architecture mainly includes MPConv, SPPCSPC, E-ELAN, BConv, CNeB2, C3C2, and GAM modules, as shown in Figure 3. BConv is composed of convolutional blocks with asynchronous lengths. E-ELAN and Catconv improve network detection accuracy by performing concat operations on other convolutional layers. The local value information and maximum value information of the local area can be extracted by MPConv at the same time, which is a down-sampling module. SPPCSPC is a new and improved spatial pyramid pooling structure (SPP) that combines spatial pyramid pooling and a CSP structure. In order to improve the detection accuracy of YOLOv7 for small targets and occluded targets, the GAM module is inserted into the Head part of the YOLOv7 network structure, and the Catconv module is replaced with the C3C2 module.
- (2)
- Some Improvements. To improve computational efficiency and recognition accuracy, 6 Convs and 1 Concat in YOLOv7’s backbone are replaced with CNeB, which stands for CSP ConvNextBlock with 3 convolutions. In YOLOv7-C3C2 and YOLOv7-C3C2-GAM, CNeB2 is added to the backbone network of YOLOv7, CNeB2 indicates that a convolutional layer is added to the CNeB, and the structure diagram of CNeB is shown in Figure 3. In the improved YOLOv7 network, the Catconv module is replaced with the C3C2 module, which represents CSP Bottleneck with 3 convolutions. The above network structure improvements have been added to the YOLOv7-C3C2 model. In order to improve the YOLOv7 model’s attention to key information and regions of interest, the GAM attention mechanism is introduced into the Head part of the YOLOv7-C3C2 model, and the resulting model is called YOLOv7-C3C2-GAM.
- (3)
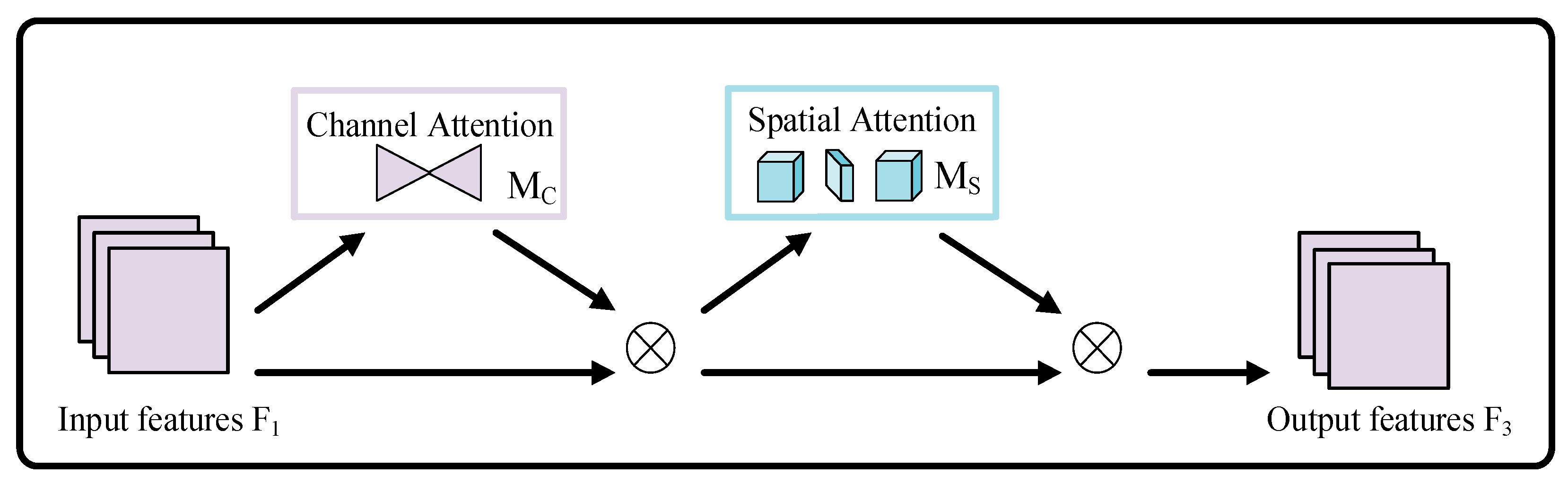
- Global attention mechanism. During the detection of small or blocked objects, if the occluded area or area of interest is focused on, more key features that were conducive to recognition in the area will be extracted. GAM adopts the sequential channel–spatial attention in CBAM, but the internal submodules have been redesigned, as shown in Figure 4. Among them, the channel attention sub-module preserved feature information across three dimensions through 3D arrangement. Multi-layer perceptron is used to amplify the cross-dimensional channel–spatial correlation. The spatial attention sub-module achieves spatial information fusion through two convolutional layers. GAM improves the detection performance of the YOLOv7 network by reducing information loss and amplifying global interaction features, effectively balancing speed and accuracy.
4. Insulator Defect Detection Experiments
4.1. Data Preparation and Experiment Setup
4.2. Performance Comparison with the Existing Methods
4.3. Insulator Defect Detection Results Based on Multi-UAV Aerial Images
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- References Ahmed, M.D.F.; Mohanta, J.C.; Sanyal, A. Inspection and identification of transmission line insulator breakdown based on deep learning using aerial images. Electr. Power Syst. Res. 2022, 211, 108199. [Google Scholar] [CrossRef]
- Dian, S.; Zhong, X.; Zhong, Y. Faster R-Transformer: An efficient method for insulator detection in complex aerial environments. Measurement 2022, 199, 111238. [Google Scholar] [CrossRef]
- Yu, J.; Liu, K.; He, M.; Qin, L. Insulator defect detection: A detection method of target search and cascade recognition. Energy Rep. 2021, 7, 750–759. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, Z.; Wang, Y. Bidirection-Fusion-YOLOv3: An improved method for insulator defect detection using uav image. IEEE Trans. Instrum. Meas. 2022, 71, 3521408. [Google Scholar] [CrossRef]
- Jeffrey Kuo, C.-F.; Chen, S.-H.; Huang, C.-Y. Automatic detection, classification and localization of defects inlargephotovoltaic plants using unmanned aerial vehicles (UAV) based infrared (IR) and RGB imaging. Energy Convers. Manag. 2023, 276, 116495. [Google Scholar] [CrossRef]
- Souza, B.J.; Stefenon, S.F.; Singh, G.; Freire, R.Z. Hybrid-YOLO for classification of insulators defects in transmission lines based on UAV. Int. J. Electr. Power Energy Syst. 2023, 148, 108982. [Google Scholar] [CrossRef]
- Qiu, Q.; Lau, D. Real-time detection of cracks in tiled sidewalks using YOLO-based method applied to unmanned aerial vehicle (UAV) images. Autom. Constr. 2023, 147, 104745. [Google Scholar] [CrossRef]
- Zhang, Y.; Zuo, Z.; Xu, X.; Wu, J.; Zhu, J.; Zhang, H.; Wang, J.; Tian, Y. Road damage detection using UAV images based on multi-level attention mechanism. Autom. Constr. 2022, 144, 104613. [Google Scholar] [CrossRef]
- Jae Jin, I.; Yeong Lim, D.; Cheol Bang, I. Development of fault diagnosis for nuclear power plant using deep learning and infrared sensor equipped UAV. Ann. Nucl. Energy 2023, 181, 109577. [Google Scholar] [CrossRef]
- Wang, Z.-f.; Yu, Y.-f.; Wang, J.; Zhang, J.-q.; Zhu, H.-l.; Li, P.; Xu, L.; Jiang, H.-n.; Sui, Q.-m.; Jia, L.; et al. Convolutional neural-network-based automatic dam-surface seepage defect identification from thermograms collected from UAV-mounted thermal imaging camera. Constr. Build. Mater. 2022, 323, 126416. [Google Scholar] [CrossRef]
- Deng, F.; Xie, Z.; Mao, W.; Li, B.; Shan, Y.; Wei, B.; Zeng, H. Research on edge intelligent recognition method oriented to transmission line insulator fault detection. Int. J. Electr. Power Energy Syst. 2022, 139, 108054. [Google Scholar] [CrossRef]
- Han, G.; He, M.; Zhao, F.; Xu, Z.; Zhang, M.; Qin, L. Insulator detection and damage identification based on improved lightweight YOLOv4 network. Energy Rep. 2021, 7, 187–197. [Google Scholar] [CrossRef]
- Dai, Z. Uncertainty-aware accurate insulator fault detection based on an improved YOLOX model. Energy Rep. 2022, 8, 12809–12821. [Google Scholar] [CrossRef]
- Li, Y.; Ni, M.; Lu, Y. Insulator defect detection for power grid based on light correction enhancement and YOLOv5 model. Energy Rep. 2022, 8, 807–814. [Google Scholar] [CrossRef]
- Zheng, J.; Wu, H.; Zhang, H.; Wang, Z.; Xu, W. Insulator-defect detection algorithm based on improved YOLOv7. Sensors 2022, 22, 8801. [Google Scholar] [CrossRef]
- Chen, J.; Fu, Z.; Cheng, X.; Wang, F. An method for power lines insulator defect detection with attention feedback and double spatial pyramid. Electr. Power Syst. Res. 2023, 218, 109175. [Google Scholar] [CrossRef]
- Yuan, J.; Zheng, X.; Peng, L.; Qu, K.; Luo, H.; Wei, L.; Jin, J.; Tan, F. Identification method of typical defects in transmission lines based on YOLOv5 object detection algorithm. Energy Rep. 2023, 9, 323–332. [Google Scholar] [CrossRef]
- He, H.; Huang, X.; Song, Y.; Zhang, Z.; Wang, M.; Chen, B.; Yan, G. An insulator self-blast detection method based on YOLOv4 with aerial images. Energy Rep. 2022, 8, 448–454. [Google Scholar] [CrossRef]
- Xing, Z.; Chen, X. Lightweight algorithm of insulator identification applicable to electric power engineering. Energy Rep. 2022, 8, 353–362. [Google Scholar] [CrossRef]
- Liu, T.; Li, G.; Gao, Y. Fault diagnosis method of substation equipment based on You Only Look Once algorithm and infrared imaging. Energy Rep. 2022, 8, 171–180. [Google Scholar] [CrossRef]
- Satheeswari, D.; Shanmugam, L.; Swaroopan, N.M.J. Recognition of Bird’s Nest in High Voltage Power Line using SSD. In Proceedings of the 2022 First International Conference on Electrical, Electronics, Information and Communication Technologies (ICEEICT), Trichy, India, 16–18 February 2022; pp. 1–7. [Google Scholar]
- Zhang, W.; Liu, X.; Yuan, J.; Xu, L.; Sun, H.; Zhou, J.; Liu, X. RCNN-based foreign object detection for securing power transmission lines (RCNN4SPTL). Procedia Comput. Sci. 2019, 147, 331–337. [Google Scholar] [CrossRef]
- Wu, M.; Guo, L.; Chen, R.; Du, W.; Wang, J.; Liu, M.; Kong, X.; Tang, J. Improved YOLOX Foreign Object Detection Algorithm for Transmission Lines. Wirel. Commun. Mob. Comput. 2022, 2022, 5835693. [Google Scholar] [CrossRef]
- Qiu, Z.; Zhu, X.; Liao, C.; Qu, W.; Yu, Y. A Lightweight YOLOv4-EDAM Model for Accurate and Real-time Detection of Foreign Objects Suspended On Power Lines. IEEE Trans. Power Deliv. 2022, 10, 1–12. [Google Scholar] [CrossRef]
- Zhang, Z.; He, G. Recognition of Bird Nests on Power Transmission Lines in Aerial Images Based on Improved YOLOv4. Front. Energy Res. 2022, 10, 870253. [Google Scholar] [CrossRef]
- Haotian, S.; Tong, L.; Pu, W.; Liang, X.; Hongwei, Z. Foreign Object Detection of Electric Transmission Line with Dynamic Federated Learning. IOP Conf. Ser. Earth Environ. Sci. 2021, 791, 012159. [Google Scholar] [CrossRef]
- Pan, L.; Chen, L.; Zhu, S.; Tong, W.; Guo, L. Research on small sample data-driven inspection technology of uav for transmission line insulator defect detection. Information 2022, 13, 276. [Google Scholar] [CrossRef]
- Ma, Y.; Li, Q.; Chu, L.; Zhou, Y.; Xu, C. Real-time detection and spatial localization of insulators for UAV inspection based on binocular stereo vision. Remote Sens. 2021, 13, 230. [Google Scholar] [CrossRef]
- Ma, J.; Tang, L.; Fan, F.; Huang, J.; Mei, X.; Ma, Y. SwinFusion: Cross-domain long-range learning for general image fusion via swin transformer. IEEE/CAA J. Autom. Sin. 2022, 9, 1200–1217. [Google Scholar] [CrossRef]
- Lei, X.; Sui, Z. Intelligent fault detection of high voltage line based on the Faster R-CNN. Measurement 2019, 138, 379–385. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 39, 1137–1149. [Google Scholar] [CrossRef]
- Duan, K.; Bai, S.; Xie, L.; Qi, H.; Huang, Q.; Tian, Q. Centernet: Keypoint triplets for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 6569–6578. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully convolutional one-stage object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9627–9636. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 10012–10022. [Google Scholar]
- Gong, H.; Mu, T.; Li, Q.; Dai, H.; Li, C.; He, Z.; Wang, W.; Han, F.; Tuniyazi, A.; Li, H.; et al. Swin-Transformer-Enabled YOLOv5 with attention mechanism for small object detection on satellite images. Remote Sens. 2022, 14, 2861. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, G.; Zhou, H.; Wang, S.; Feng, Z.; Yue, S. A ship detection method via redesigned FCOS in large-scale sar images. Remote Sens. 2022, 14, 1153. [Google Scholar] [CrossRef]
- Liu, S.; Wang, Y.; Yu, Q.; Liu, H.; Peng, Z. CEAM-YOLOv7: Improved YOLOv7 based on channel expansion and attention mechanism for driver distraction behavior detection. IEEE Access 2022, 10, 129116–129124. [Google Scholar] [CrossRef]
- Jiang, K.; Xie, T.; Yan, R.; Wen, X.; Li, D.; Jiang, H.; Jiang, N.; Feng, L.; Duan, X.; Wang, J. An attention mechanism-improved YOLOv7 object detection algorithm for hemp duck count estimation. Agriculture 2022, 12, 1659. [Google Scholar] [CrossRef]
- Xing, L.; Fan, X.; Dong, Y.; Xiong, Z.; Xing, L.; Yang, Y.; Bai, H.; Zhou, C. Multi-UAV cooperative system for search and rescue based on YOLOv5. Int. J. Disaster Risk Reduct. 2022, 76, 102972. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Configuration |
|---|---|
| CPU | Intel Core i7-10700F, CPU 2.90 GHz, RAM 32 GB |
| GPU | Nvidia GeForce GTX 2080Ti (24G) |
| Accelerated Environment | CUDA 11.1, cuDNN8.0.5 |
| Visual Studio System | Pytorch1.7.1, Python 3.7 |
| Operating System | Ubuntu 18.04 |
| Batch Size | Learning Rate | Weight Decay | Momentum | Input Image | Epochs | Gamma |
|---|---|---|---|---|---|---|
| 8 | 1 × 10−5 | 0.001 | 0.98 | 640*640 | 500 | 1.5 |
| Class | Bird Nest | Cracked | NormalCeramic | NormalGlass | SelfBlast | |
|---|---|---|---|---|---|---|
| Labels | 131 | 467 | 4841 | 1803 | 271 | |
| P | YOLOv5-S | 0.901 | 0.864 | 0.867 | 0.888 | 0.851 |
| YOLOv5-X | 0.901 | 0.876 | 0.907 | 0.918 | 0.864 | |
| YOLOv7-Tiny | 0.876 | 0.818 | 0.830 | 0.790 | 0.864 | |
| YOLOv7-X | 0.902 | 0.891 | 0.881 | 0.895 | 0.872 | |
| YOLOv7 | 0.903 | 0.880 | 0.874 | 0.908 | 0.865 | |
| YOLOv7-C3C2 | 0.908 | 0.889 | 0.910 | 0.919 | 0.878 | |
| YOLOv7-C3C2-GAM | 0.903 | 0.907 | 0.887 | 0.910 | 0.884 | |
| R | YOLOv5-S | 0.907 | 0.833 | 0.764 | 0.734 | 0.889 |
| YOLOv5-X | 0.905 | 0.859 | 0.83 | 0.784 | 0.934 | |
| YOLOv7-Tiny | 0.923 | 0.794 | 0.673 | 0.702 | 0.889 | |
| YOLOv7-X | 0.893 | 0.844 | 0.783 | 0.743 | 0.952 | |
| YOLOv7 | 0.924 | 0.863 | 0.842 | 0.788 | 0.926 | |
| YOLOv7-C3C2 | 0.903 | 0.816 | 0.696 | 0.707 | 0.899 | |
| YOLOv7-C3C2-GAM | 0.924 | 0.844 | 0.703 | 0.707 | 0.890 | |
| Model | P | R | mAP | Speed (ms) | Size (Mb) |
|---|---|---|---|---|---|
| YOLOv5-S | 0.874 | 0.825 | 0.845 | 1.9 | 13.7 |
| YOLOv5-X | 0.893 | 0.862 | 0.878 | 10.3 | 166 |
| YOLOv7-Tiny | 0.836 | 0.796 | 0.821 | 1.2 | 11.7 |
| YOLOv7-X | 0.889 | 0.843 | 0.883 | 6.3 | 135 |
| YOLOv7 | 0.886 | 0.868 | 0.886 | 6.2 | 71.3 |
| YOLOv7-C3C2 | 0.899 | 0.853 | 0.888 | 6.1 | 63.1 |
| YOLOv7-C3C2-GAM | 0.891 | 0.847 | 0.879 | 6.3 | 63.2 |
| Model | Train Box Loss | Train Obj Loss | Train Cls Loss | Val Box Loss | Val Obj_Loss | Val Cls_Loss |
|---|---|---|---|---|---|---|
| YOLOv7 | 0.0444 | 0.0924 | 0.0078 | 0.0502 | 0.0822 | 0.0120 |
| YOLOv7-C3C2 | 0.0400 | 0.0835 | 0.0011 | 0.0470 | 0.0854 | 0.0052 |
| YOLOv7-C3C2-GAM | 0.0407 | 0.0896 | 0.0012 | 0.0468 | 0.0848 | 0.0047 |
| Class | YOLOv7 | YOLOv7-C3C2 | YOLOv7-C3C2 -GAM | |||
|---|---|---|---|---|---|---|
| P | R | P | R | P | R | |
| BirdNest | 0.903 | 0.923 | 0.908 | 0.903 | 0.903 | 0.924 |
| Cracked | 0.880 | 0.863 | 0.889 | 0.814 | 0.907 | 0.807 |
| NormalCeramic | 0.874 | 0.842 | 0.9 | 0.696 | 0.895 | 0.676 |
| NormalGlass | 0.908 | 0.788 | 0.919 | 0.707 | 0.895 | 0.677 |
| SelfBlast | 0.865 | 0.926 | 0.878 | 0.879 | 0.891 | 0.863 |
| All | 0.886 | 0.868 | 0.899 | 0.832 | 0.891 | 0.797 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, R.; Zhou, S.; Zhang, Y.; Zhang, N.; Zhou, C.; Li, M. Research on Insulator Defect Detection Based on Improved YOLOv7 and Multi-UAV Cooperative System. Coatings 2023, 13, 880. https://doi.org/10.3390/coatings13050880
Chang R, Zhou S, Zhang Y, Zhang N, Zhou C, Li M. Research on Insulator Defect Detection Based on Improved YOLOv7 and Multi-UAV Cooperative System. Coatings. 2023; 13(5):880. https://doi.org/10.3390/coatings13050880
Chicago/Turabian StyleChang, Rong, Shuai Zhou, Yi Zhang, Nanchuan Zhang, Chengjiang Zhou, and Mengzhen Li. 2023. "Research on Insulator Defect Detection Based on Improved YOLOv7 and Multi-UAV Cooperative System" Coatings 13, no. 5: 880. https://doi.org/10.3390/coatings13050880
APA StyleChang, R., Zhou, S., Zhang, Y., Zhang, N., Zhou, C., & Li, M. (2023). Research on Insulator Defect Detection Based on Improved YOLOv7 and Multi-UAV Cooperative System. Coatings, 13(5), 880. https://doi.org/10.3390/coatings13050880