Strain Plethysmography Using a Hermetically Sealed MEMS Strain Sensor

 ,
,
Abstract
1. Introduction
2. Materials and Methods
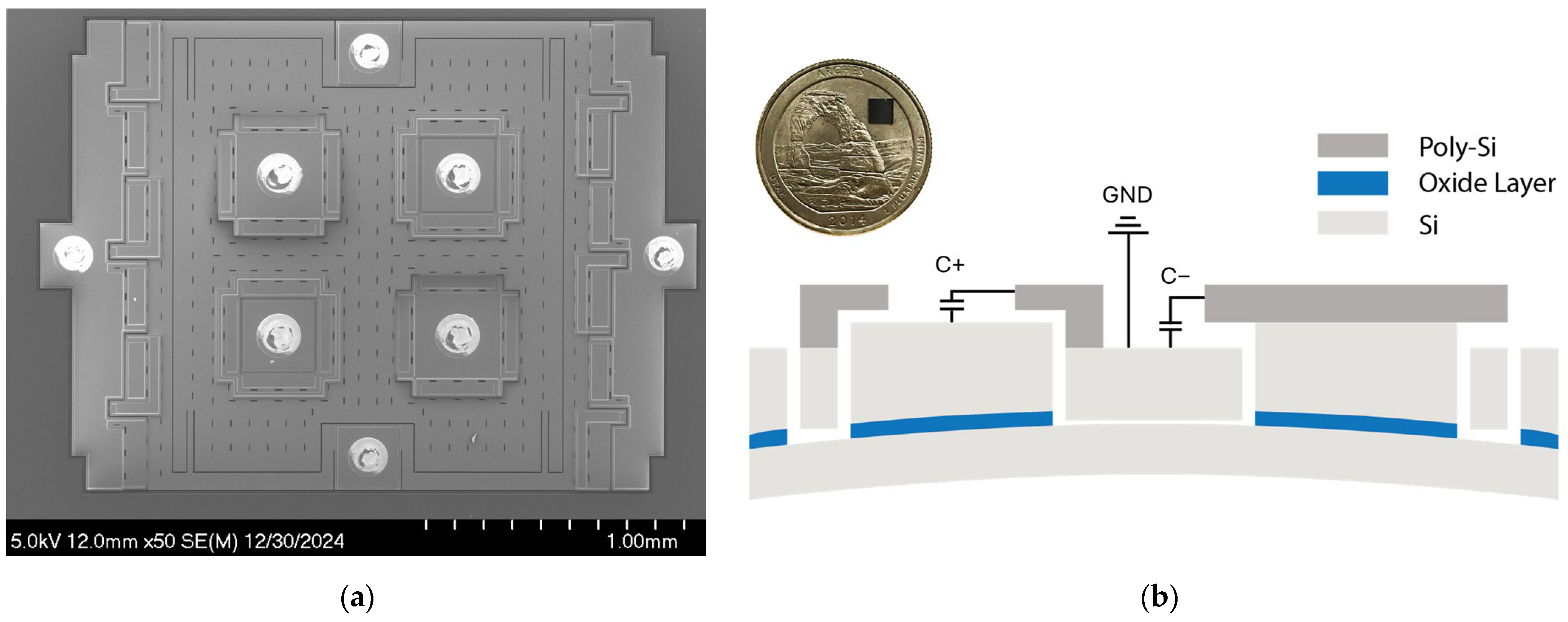
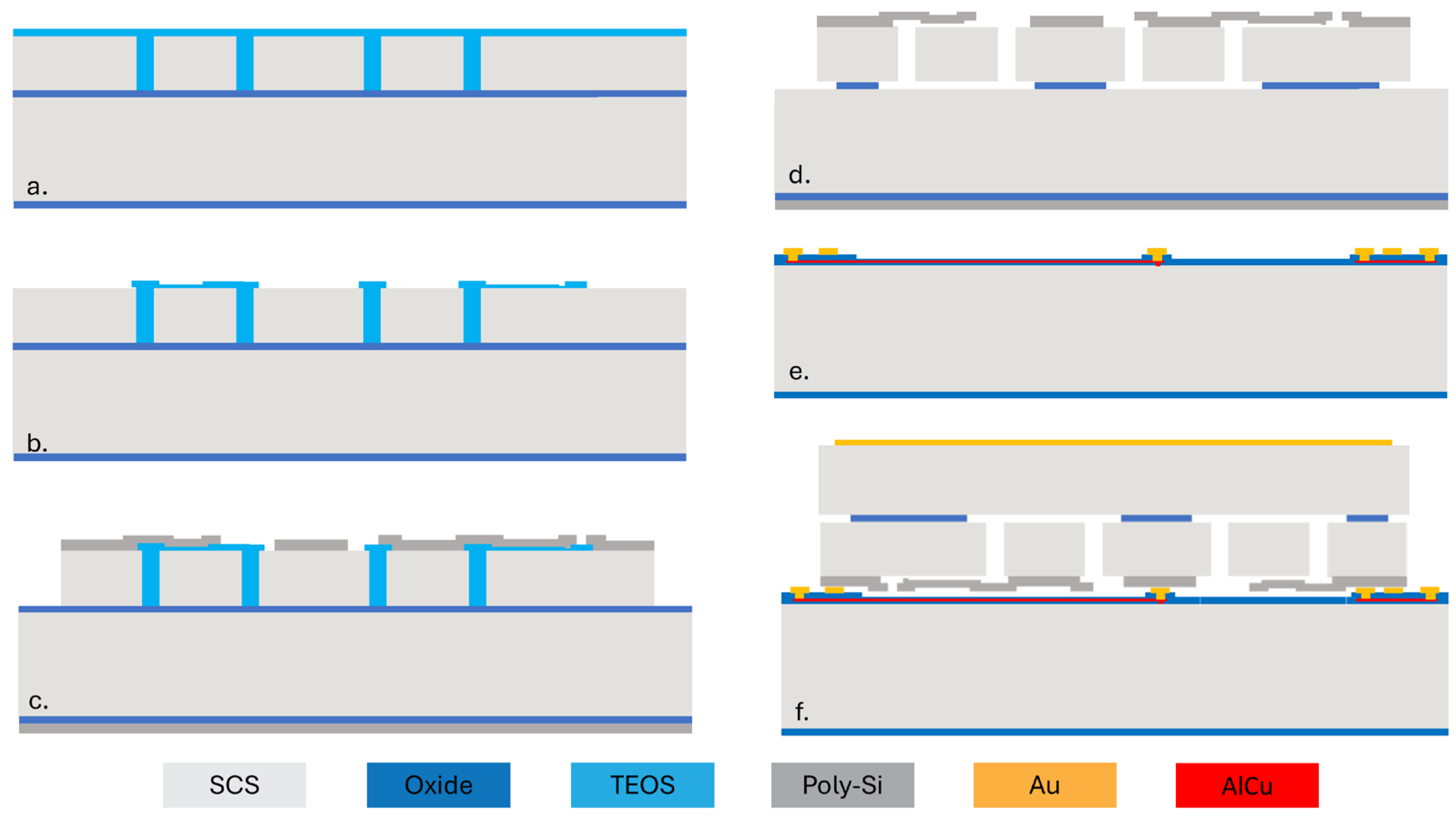
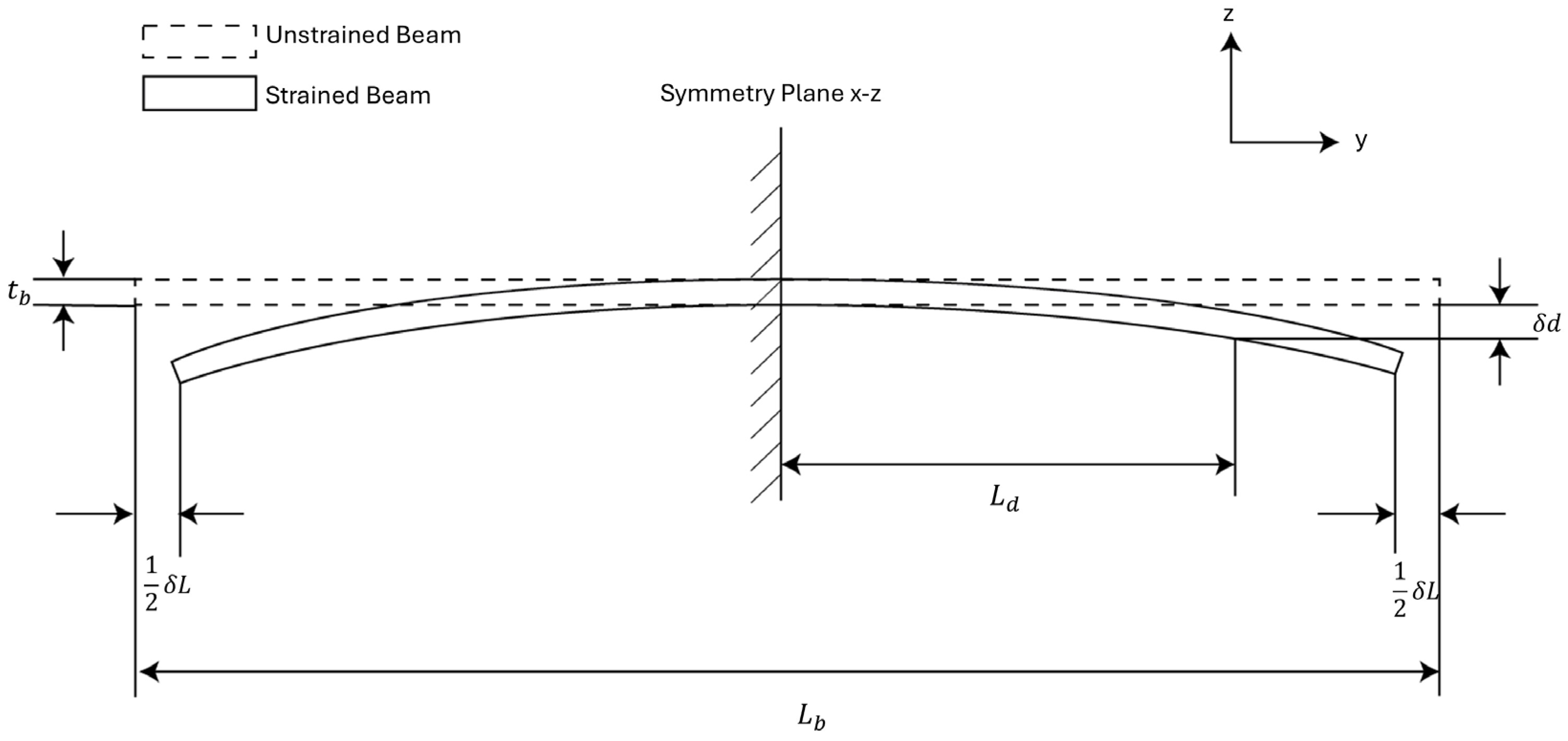
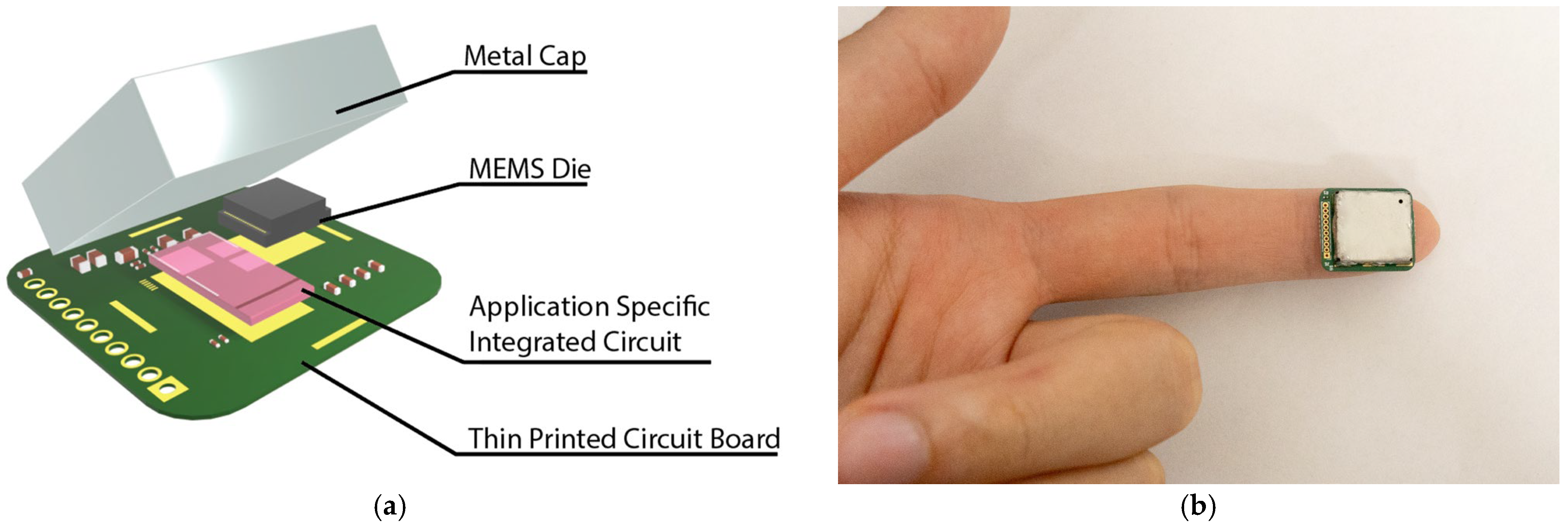
2.1. Strain Sensor Design
2.2. Strain Sensing System
3. Results and Discussion
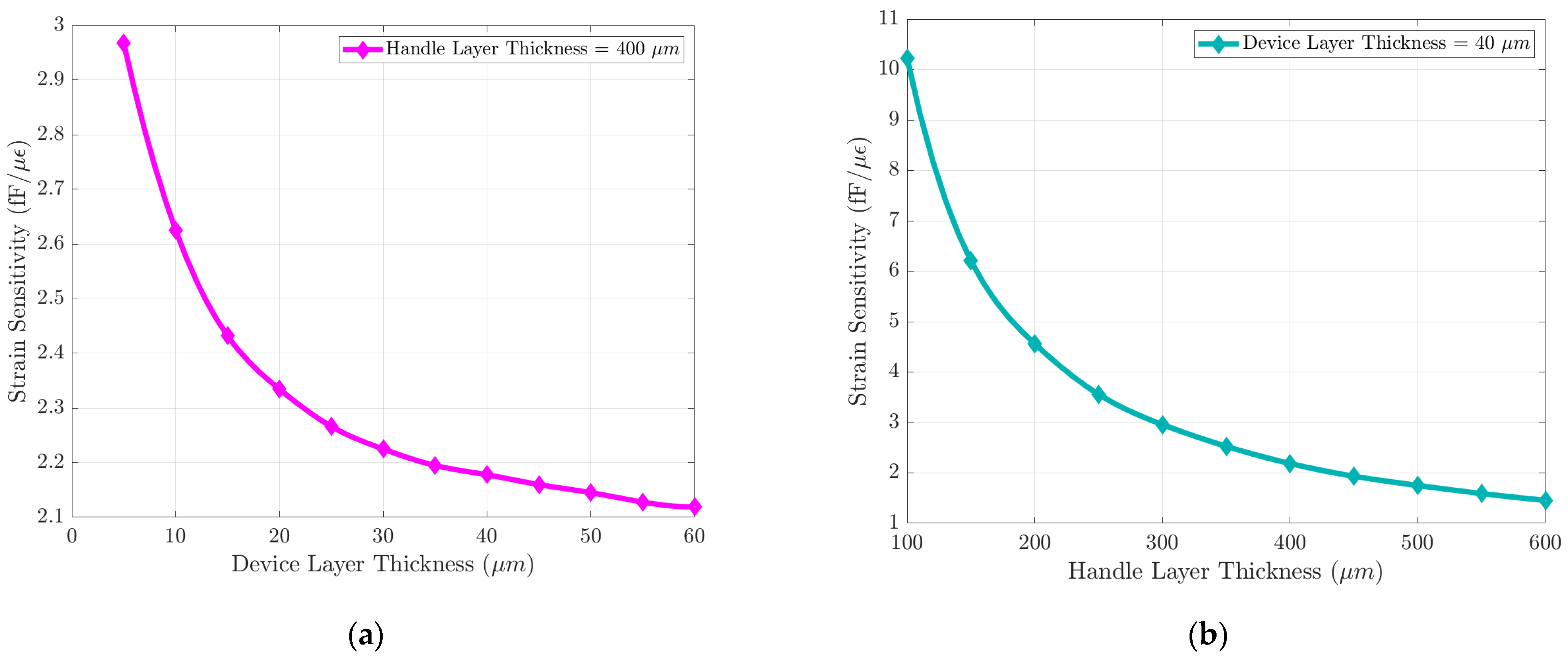
3.1. Strain Sensor Finite Element Simulation
3.2. Strain Sensing System Characterization
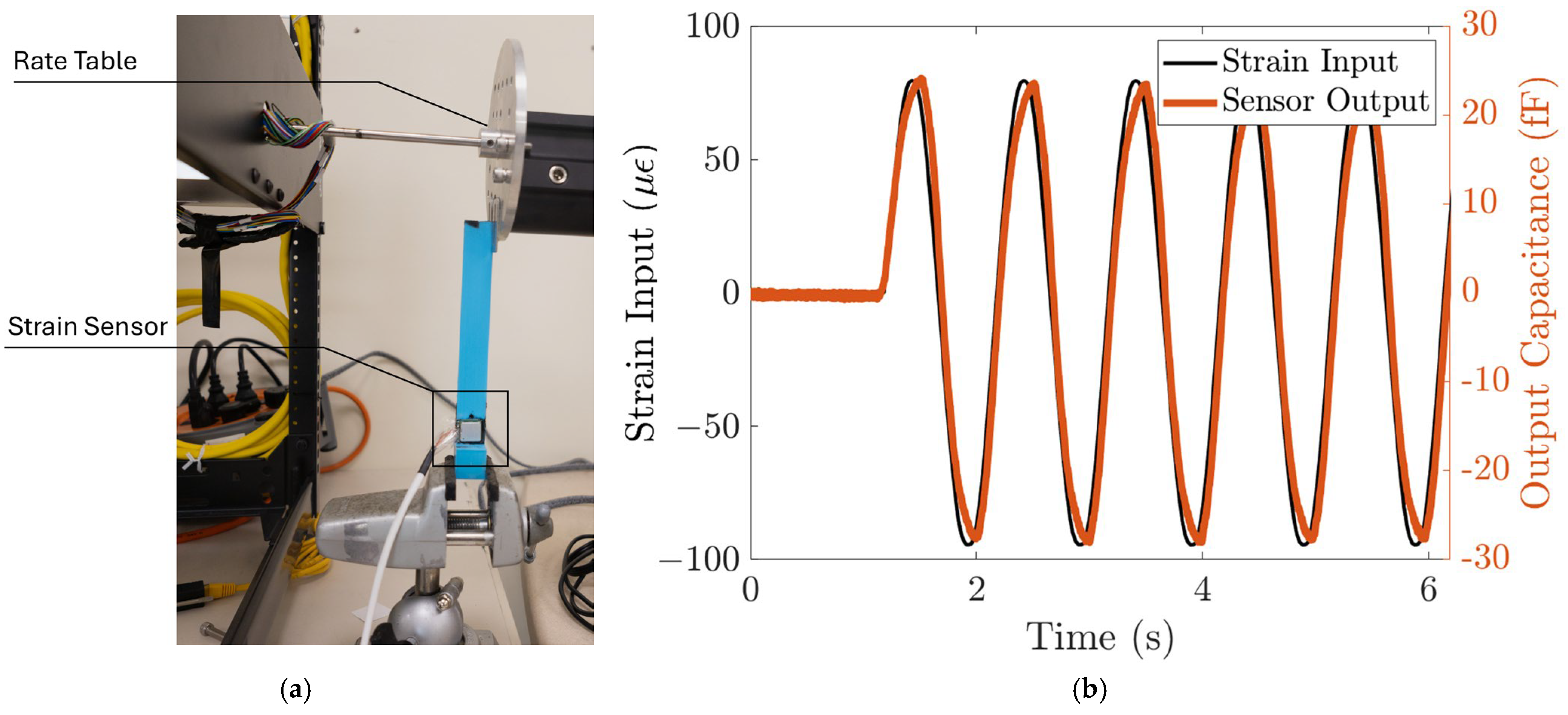
3.2.1. Strain Sensitivity Characterization
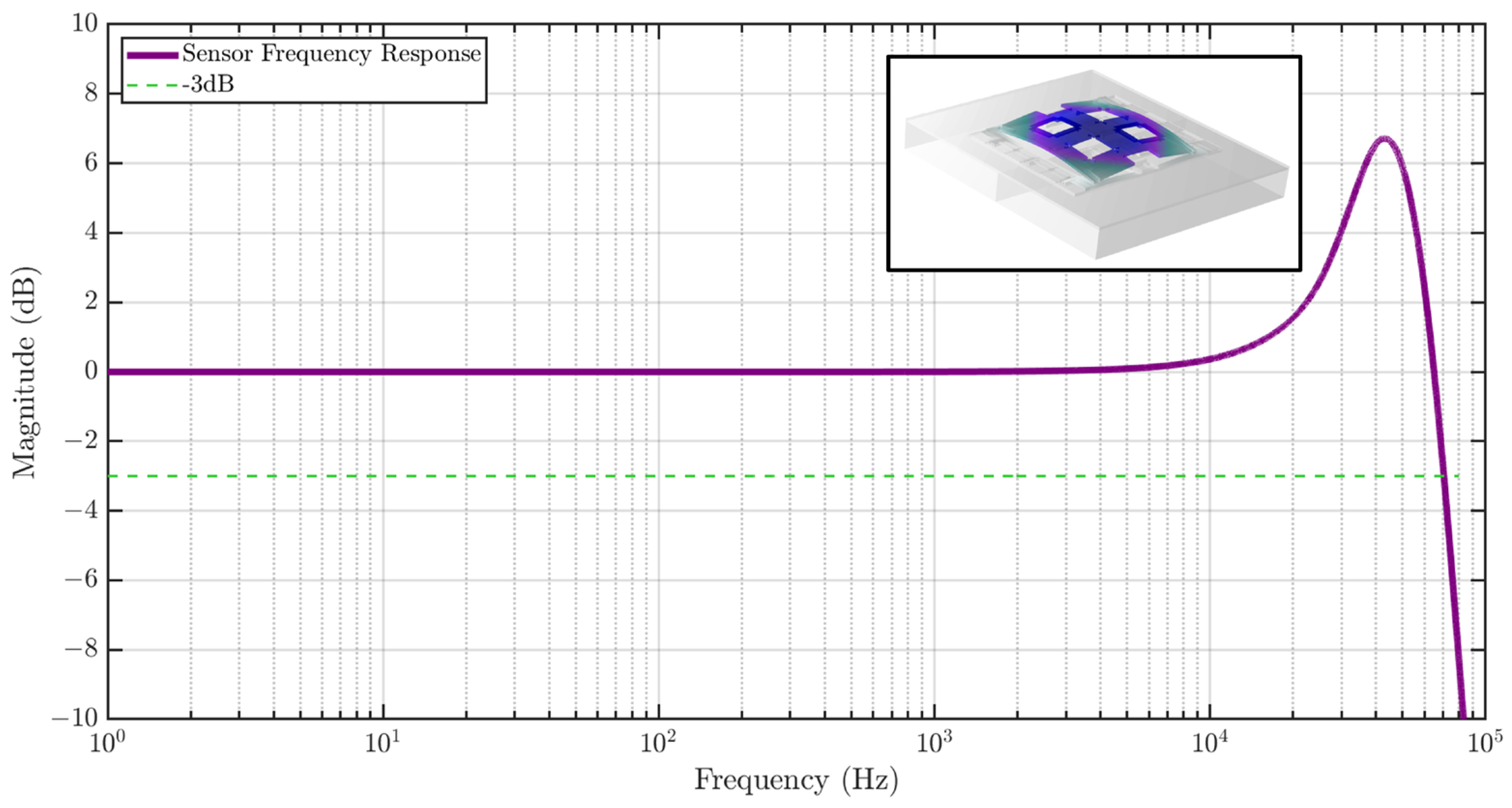
3.2.2. Response to Dynamic Loads
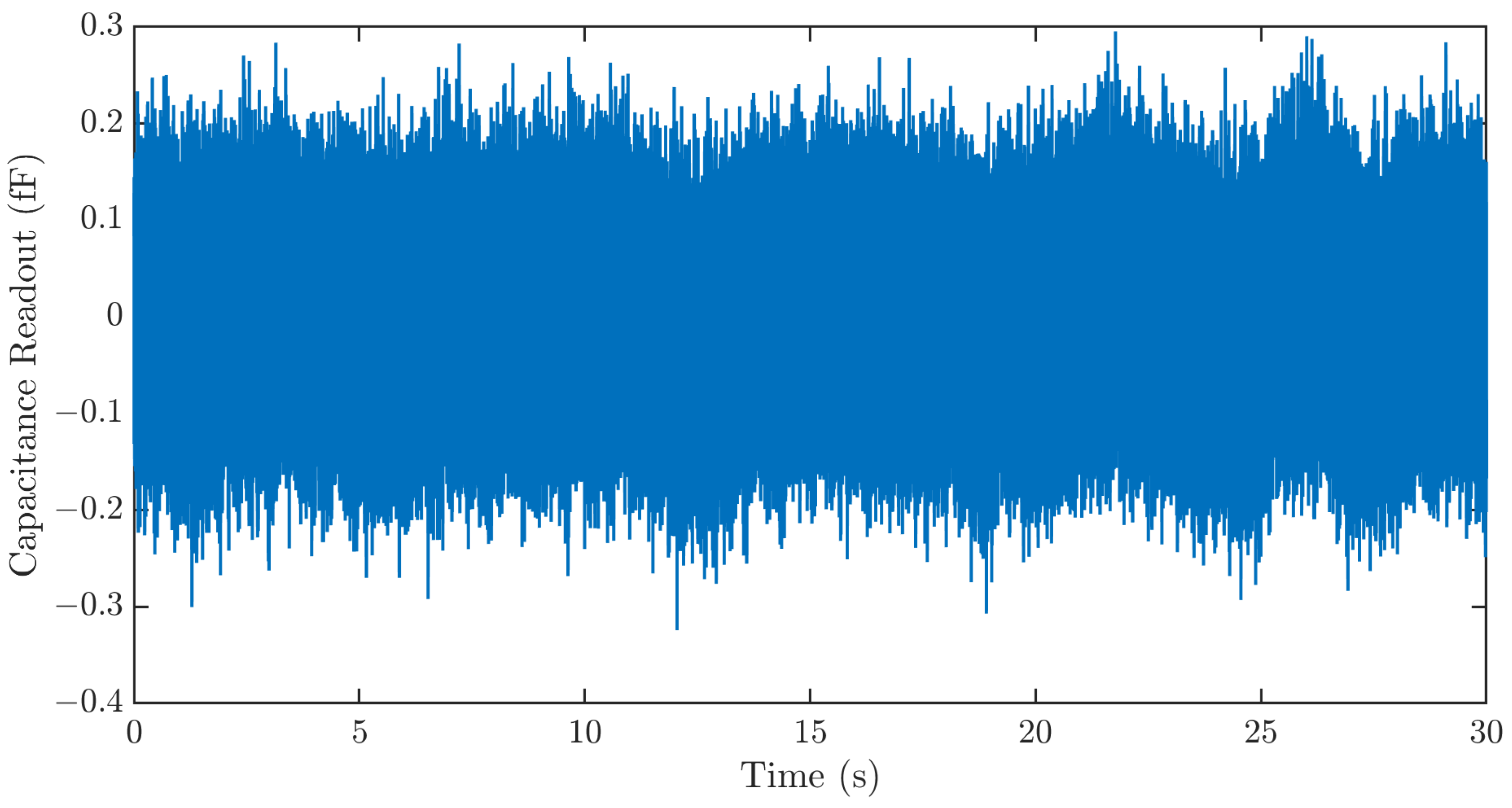
3.2.3. Resolution
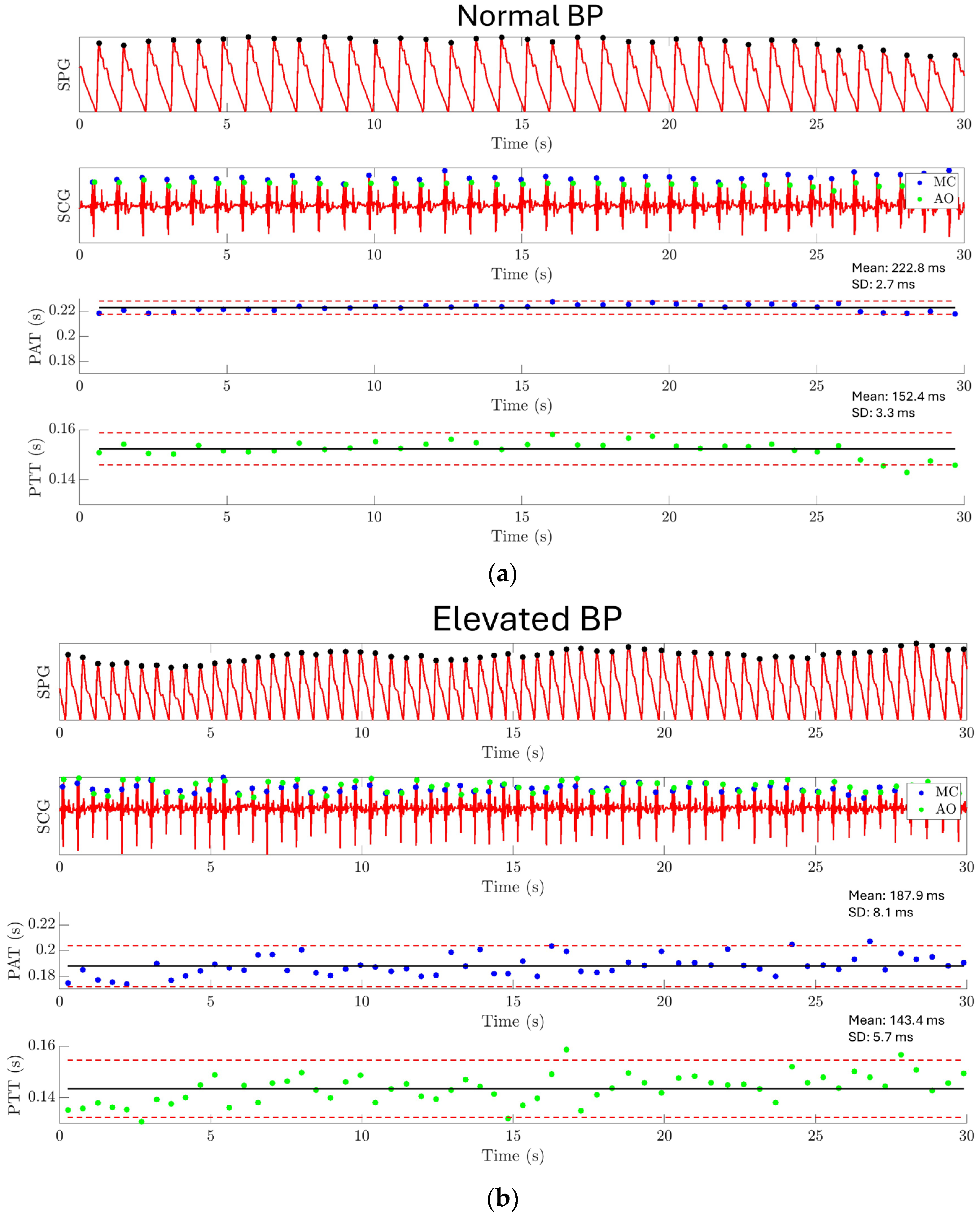
3.3. Cardiovascular Parameter Extraction
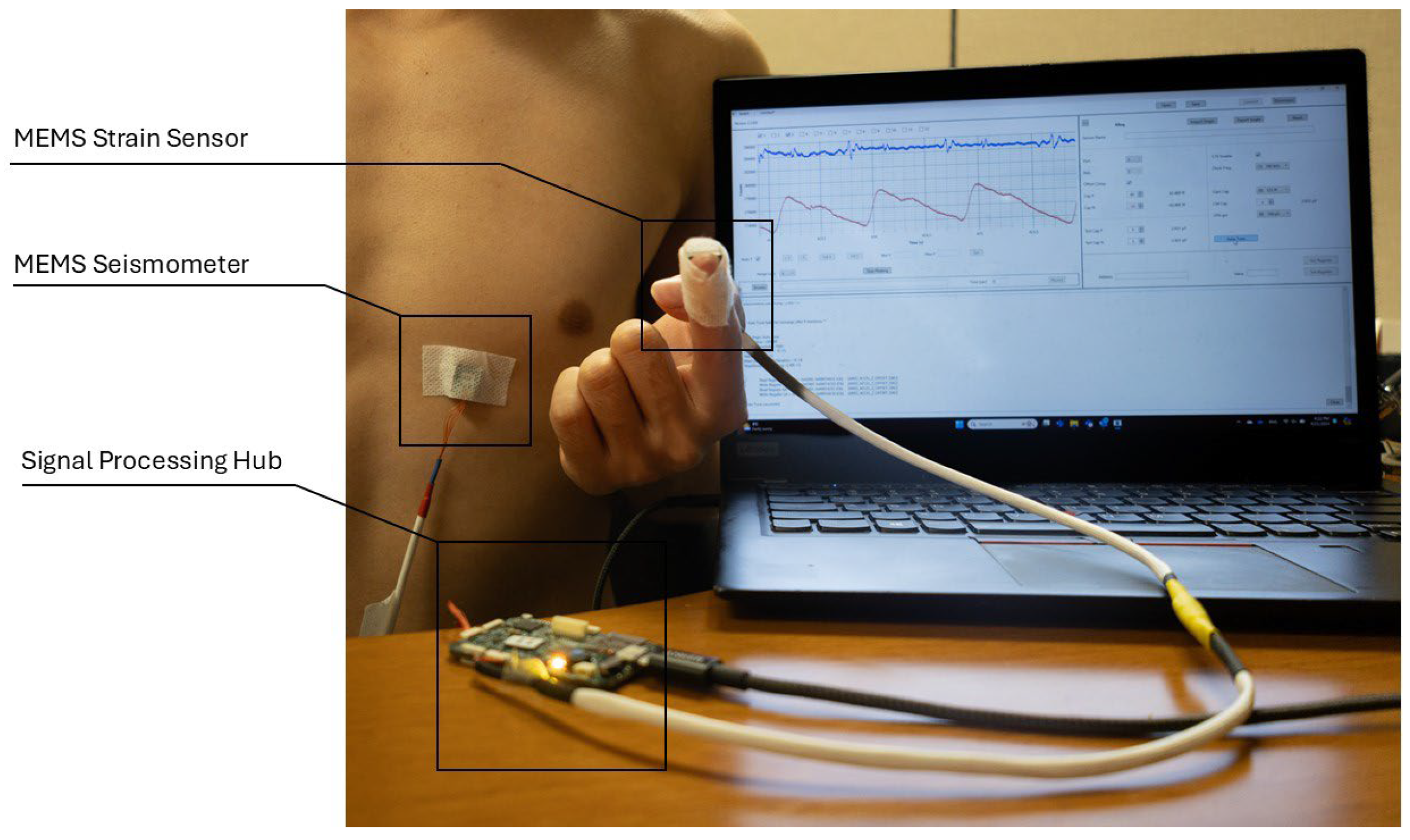
3.3.1. Experimental Setup
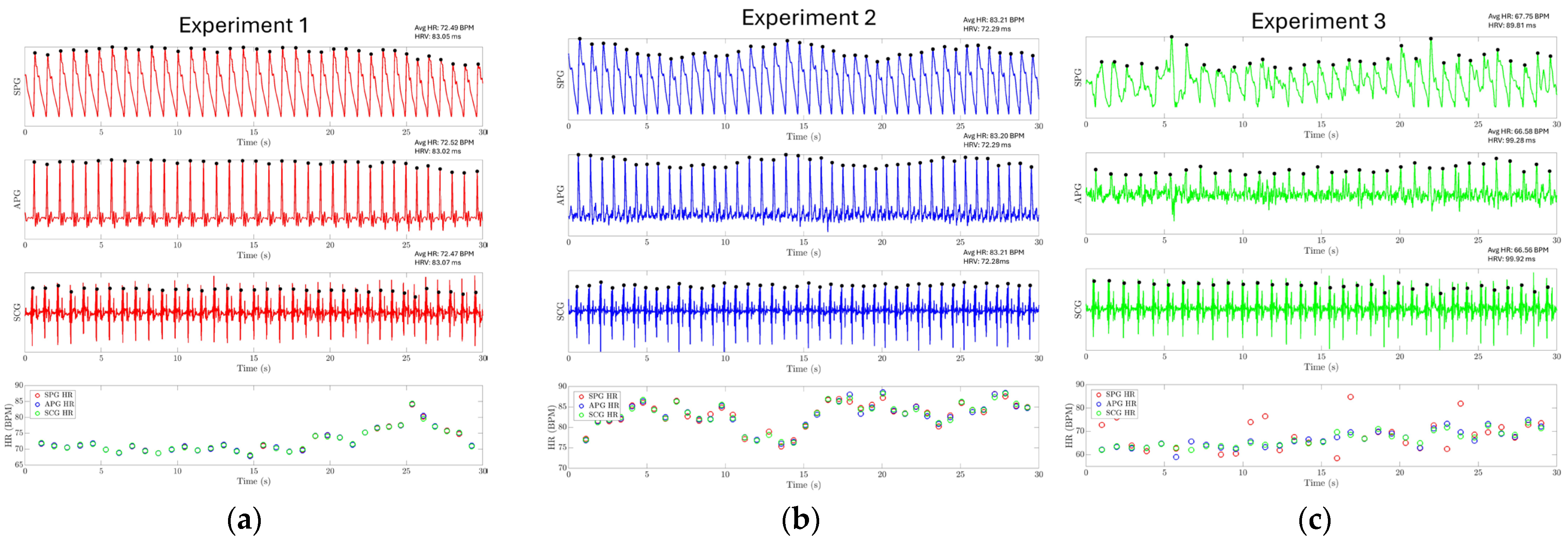
- In experiments 1 and 4, the MEMS strain sensor is wrapped around the fingertip using medical tape as shown in Figure 10a.
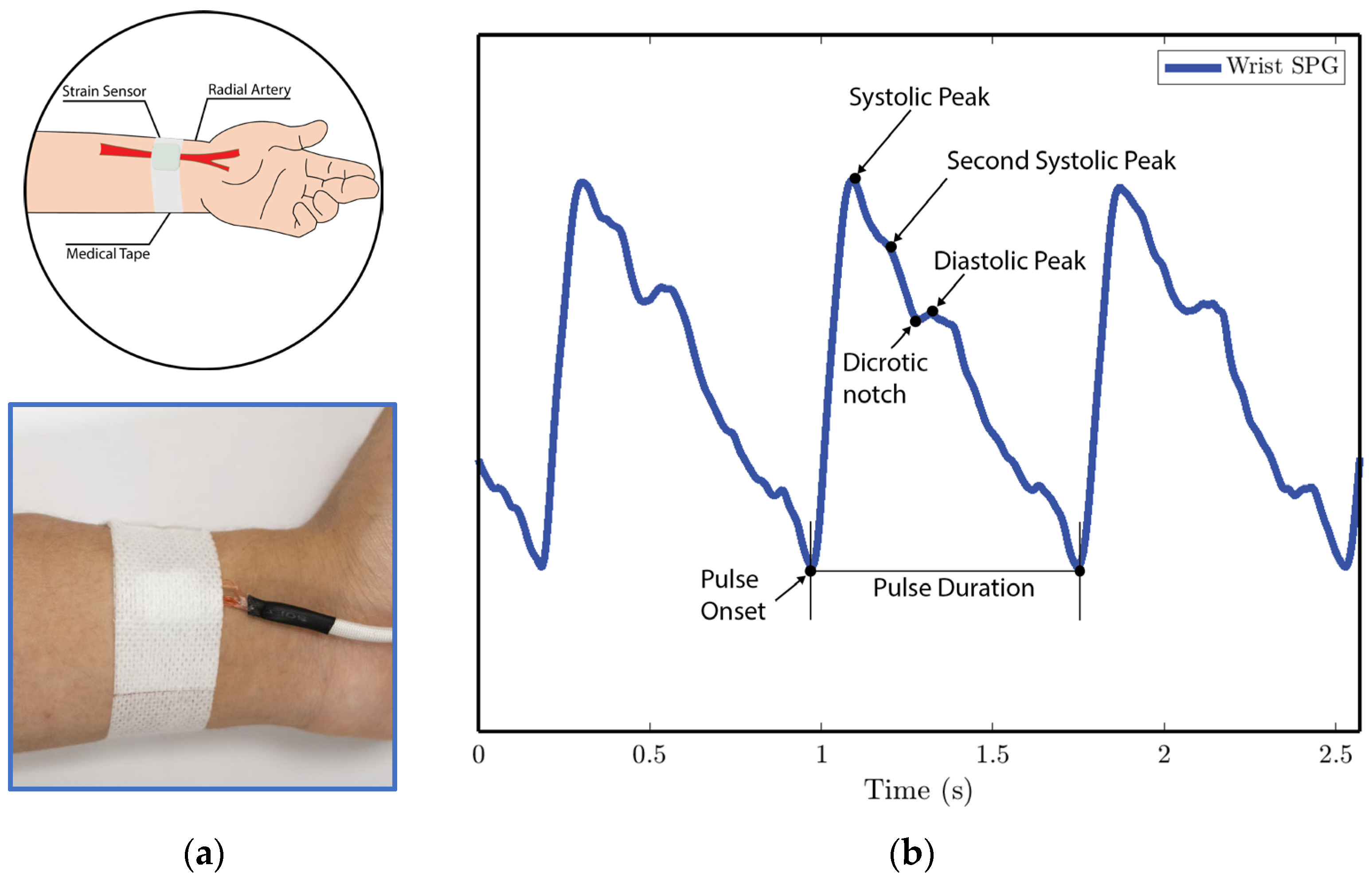
- In experiment 2, the MEMS strain sensor is placed on the wrist and fixed with medical tape, as shown in Figure 11a.
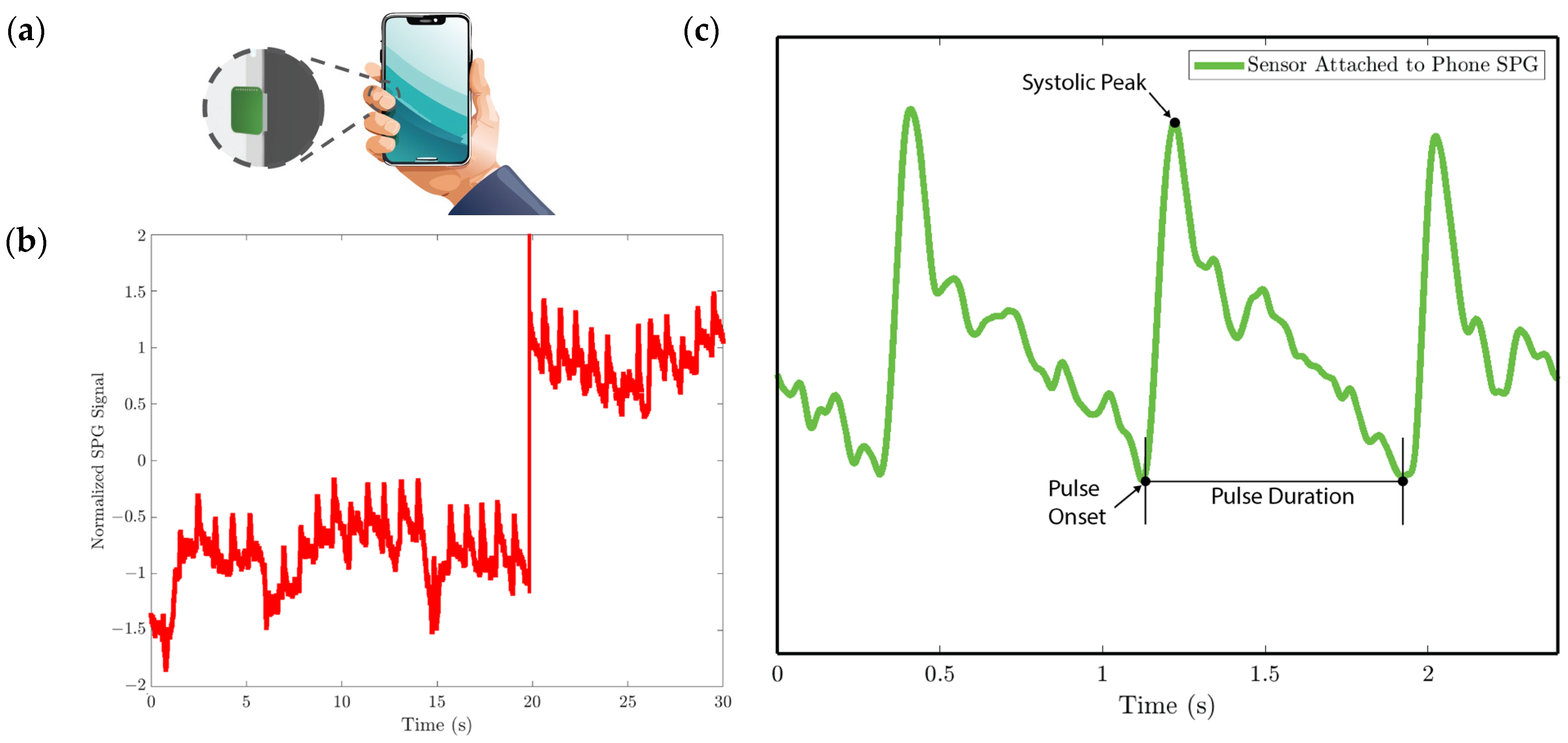
- In experiment 3, the MEMS strain sensor is first attached to the side of a cell phone using double-sided tape. The subject then holds the phone to collect the SPG signal, as shown in Figure 12a.
3.3.2. Signal Processing
3.3.3. Cardiovascular Parameter Extraction Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Mirvis, D.M.; Goldberger, A.L. Electrocardiography. Heart Dis. 2001, 1, 82–128. [Google Scholar]
- Feng, J.; Huang, Z.; Zhou, C.; Ye, X. Study of continuous blood pressure estimation based on pulse transit time, heart rate and photoplethysmography-derived hemodynamic covariates. Australas. Phys. Eng. Sci. Med. 2018, 41, 403–413. [Google Scholar] [CrossRef]
- Slapničar, G.; Luštrek, M.; Marinko, M. Continuous Blood Pressure Estimation from PPG Signal. Informatica 2024, 42, 33–42. [Google Scholar]
- Taebi, A.; Solar, B.E.; Bomar, A.J.; Sandler, R.H.; Mansy, H.A. Recent Advances in Seismocardiography. Vibration 2019, 2, 64–86. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Zhang, Y.; Zhou, C. BiGRU-attention for Continuous blood pressure trends estimation through single channel PPG. Comput. Biol. Med. 2024, 168, 107795. [Google Scholar] [CrossRef]
- Saugel, B.; Kouz, K.; Scheeren, T.W.; Greiwe, G.; Hoppe, P.; Romagnoli, S.; de Backer, D. Cardiac output estimation using pulse wave analysis—Physiology, algorithms, and technologies: A narrative review. Br. J. Anaesth. 2021, 126, 67–76. [Google Scholar] [CrossRef]
- Shokouhmand, A.; Jiang, X.; Ayazi, F.; Ebadi, N. MEMS Fingertip Strain Plethysmography for Cuffless Estimation of Blood Pressure. IEEE J. Biomed. Health Inform. 2024, 28, 2699–2712. [Google Scholar] [CrossRef]
- Whitney, R.J. The measurement of volume changes in human limbs. J. Physiol. 1953, 121, 1–27. [Google Scholar] [CrossRef] [PubMed]
- Pant, S.; Umesh, S.; Asokan, S. A Novel Approach to Acquire the Arterial Pulse by Finger Plethysmography Using Fiber Bragg Grating Sensor. IEEE Sens. J. 2020, 20, 5921–5928. [Google Scholar] [CrossRef]
- Wang, Y.-J.; Chen, C.-H.; Sue, C.-Y.; Lu, W.-H.; Chiou, Y.-H. Estimation of Blood Pressure in the Radial Artery Using Strain-Based Pulse Wave and Photoplethysmography Sensors. Micromachines 2018, 9, 556. [Google Scholar] [CrossRef]
- Boutry, C.M.; Nguyen, A.; Lawal, Q.O.; Chortos, A.; Rondeau-Gagné, S.; Bao, Z. A Sensitive and Biodegradable Pressure Sensor Array for Cardiovascular Monitoring. Adv. Mater. 2015, 27, 6954–6961. [Google Scholar] [CrossRef] [PubMed]
- Sang, B.; Wen, H.; Junek, G.; Neveu, W.; Di Francesco, L.; Ayazi, F. An Accelerometer-Based Wearable Patch for Robust Respiratory Rate and Wheeze Detection Using Deep Learning. Biosensors 2024, 14, 118. [Google Scholar] [CrossRef] [PubMed]
- Tadi, M.J.; Lehtonen, E.; Pankäälä, M.; Saraste, A.; Vasankari, T.; Terás, M.; Koivisto, T. Gyrocardiography: A new non-invasive approach in the study of mechanical motions of the heart. Concept, method and initial observations. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Lake Buena Vista, FL, USA, 16–20 August 2016; pp. 2034–2037. [Google Scholar] [CrossRef]
- Sun, Y.; Dong, Y.; Gao, R.; Chu, Y.; Zhang, M.; Qian, X.; Wang, X. Wearable Pulse Wave Monitoring System Based on MEMS Sensors. Micromachines 2018, 9, 90. [Google Scholar] [CrossRef]
- Suster, M.; Guo, J.; Chaimanonart, N.; Ko, W.H.; Young, D.J. A High-Performance MEMS Capacitive Strain Sensing System. J. Microelectromech. Syst. 2006, 15, 1069–1077. [Google Scholar] [CrossRef]
- Poon, C.C.Y.; Zhang, Y.T. Cuff-less and Non-invasive Measurements of Arterial Blood Pressure by Pulse Transit Time. In Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 1 September–4 January 2005; pp. 5877–5880. [Google Scholar] [CrossRef]
- Yang, C.; Tavassolian, N. Pulse Transit Time Measurement Using Seismocardiogram, Photoplethysmogram, and Acoustic Recordings: Evaluation and Comparison. IEEE J. Biomed. Health Inform. 2018, 22, 733–740. [Google Scholar] [CrossRef]
- Jiang, X.; Shokouhmand, A.; Ebadi, N.; Ayazi, F. Fingertip Plethysmography Using a Sensitive Wafer-Level-Packaged Capacitive MEMS Strain Sensor. In Proceedings of the 2024 IEEE 37th International Conference on Micro Electro Mechanical Systems (MEMS), Austin, TX, USA, 21–25 January 2024; pp. 348–351. [Google Scholar] [CrossRef]
- Senturia, S.D. (Ed.) Structures. In Microsystem Design; Springer US: Boston, MA, USA, 2001; pp. 201–238. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, S.-Y.; Wang, L.-F. A Sawtooth MEMS Capacitive Strain Sensor for Passive Telemetry in Bearings. IEEE Sens. J. 2021, 21, 22527–22535. [Google Scholar] [CrossRef]
- Beigh, F.T.; Beigh, N.T.; Mallick, D. Lithographically patternable SU-8/Graphene nanocomposite based strain sensors for soft-MEMS applications. J. Micromech. Microeng. 2024, 34, 095003. [Google Scholar] [CrossRef]
- Wu, S.; Kim, D.; Tang, X.; King, M.W.; Zhu, Y. Encapsulated stretchable amphibious strain sensors. Mater. Horiz. 2024, 11, 5070–5080. [Google Scholar] [CrossRef]
- Rana, V.; Gangwar, P.; Meena, J.S.; Ramesh, A.K.; Bhat, K.N.; Das, S.; Singh, P. A highly sensitive wearable flexible strain sensor based on polycrystalline MoS2 thin film. Nanotechnology 2020, 31, 385501. [Google Scholar] [CrossRef]
- Hasanzadeh, N.; Ahmadi, M.M.; Mohammadzade, H. Blood Pressure Estimation Using Photoplethysmogram Signal and Its Morphological Features. IEEE Sens. J. 2020, 20, 4300–4310. [Google Scholar] [CrossRef]
- Solà, J.; Delgado-Gonzalo, R. (Eds.) The Handbook of Cuffless Blood Pressure Monitoring: A Practical Guide for Clinicians, Researchers, and Engineers; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Ajmal; Boonya-Ananta, T.; Rodriguez, A.J.; Le, V.N.D.; Ramella-Roman, J.C. Monte Carlo analysis of optical heart rate sensors in commercial wearables: The effect of skin tone and obesity on the photoplethysmography (PPG) signal. Biomed. Opt. Express 2021, 12, 7445–7457. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mechanism | Material | Linear Range | Scale Factor | Gauge Factor | |
|---|---|---|---|---|---|
| This work | Capacitive | Si | 800 µε | 2.34 fF/µε | 293 |
| [15] | Capacitive | Si | 1000 µε | 265 aF/µε | 602 |
| [20] | LC Resonant | Si | 1000 µε | 34 kHz/με | 430 |
| [21] | Piezoresistive | SU-8-Graphene | 50,000 µε | NA | 19.1 |
| [22] | Piezoresistive | Silver NW on PDMS | 20,000 µε | NA | 289 |
| [23] | Piezoresistive | MoS2 | 7000 µε | NA | 102 |
| SPG-APG | SPG-SCG | APG-SCG | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | ME ± SD | RMSE | ACC% | MAE | ME ± SD | RMSE | ACC% | MAE | ME ± SD | RMSE | ACC% | |
| Fingertip | 0.117 | −0.03 ± 0.14 | 0.145 | 99.80 | 0.194 | 0.016 ± 0.24 | 0.234 | 99.68 | 0.225 | −0.047 ± 0.28 | 0.281 | 99.61 |
| Wrist | 0.520 | −0.01 ± 0.66 | 0.653 | 99.22 | 0.533 | −0.012 ± 0.63 | 0.626 | 99.25 | 0.31 | 0.004 ± 0.40 | 0.394 | 99.52 |
| Phone | 4.32 | 1.17 ± 6.41 | 6.4176 | 90.36 | 4.28 | 1.18 ± 6.37 | 6.38 | 90.41 | 0.99 | −0.019 ± 1.38 | 1.35 | 97.96 |
| SPG-APG | SPG-SCG | APG-SCG | |
|---|---|---|---|
| Fingertip | 99.95 | 99.98 | 99.93 |
| Wrist | 99.99 | 99.99 | 99.99 |
| Phone | 99.21 | 99.28 | 99.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Sang, B.; Wen, H.; Junek, G.; Park, J.-W.; Ayazi, F. Strain Plethysmography Using a Hermetically Sealed MEMS Strain Sensor. Biosensors 2025, 15, 325. https://doi.org/10.3390/bios15050325
Jiang X, Sang B, Wen H, Junek G, Park J-W, Ayazi F. Strain Plethysmography Using a Hermetically Sealed MEMS Strain Sensor. Biosensors. 2025; 15(5):325. https://doi.org/10.3390/bios15050325
Chicago/Turabian StyleJiang, Xinyu, Brian Sang, Haoran Wen, Gregory Junek, Jin-Woo Park, and Farrokh Ayazi. 2025. "Strain Plethysmography Using a Hermetically Sealed MEMS Strain Sensor" Biosensors 15, no. 5: 325. https://doi.org/10.3390/bios15050325
APA StyleJiang, X., Sang, B., Wen, H., Junek, G., Park, J.-W., & Ayazi, F. (2025). Strain Plethysmography Using a Hermetically Sealed MEMS Strain Sensor. Biosensors, 15(5), 325. https://doi.org/10.3390/bios15050325