Elderly Fall Detection Based on GCN-LSTM Multi-Task Learning Using Nursing Aids Integrated with Multi-Array Flexible Tactile Sensors

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
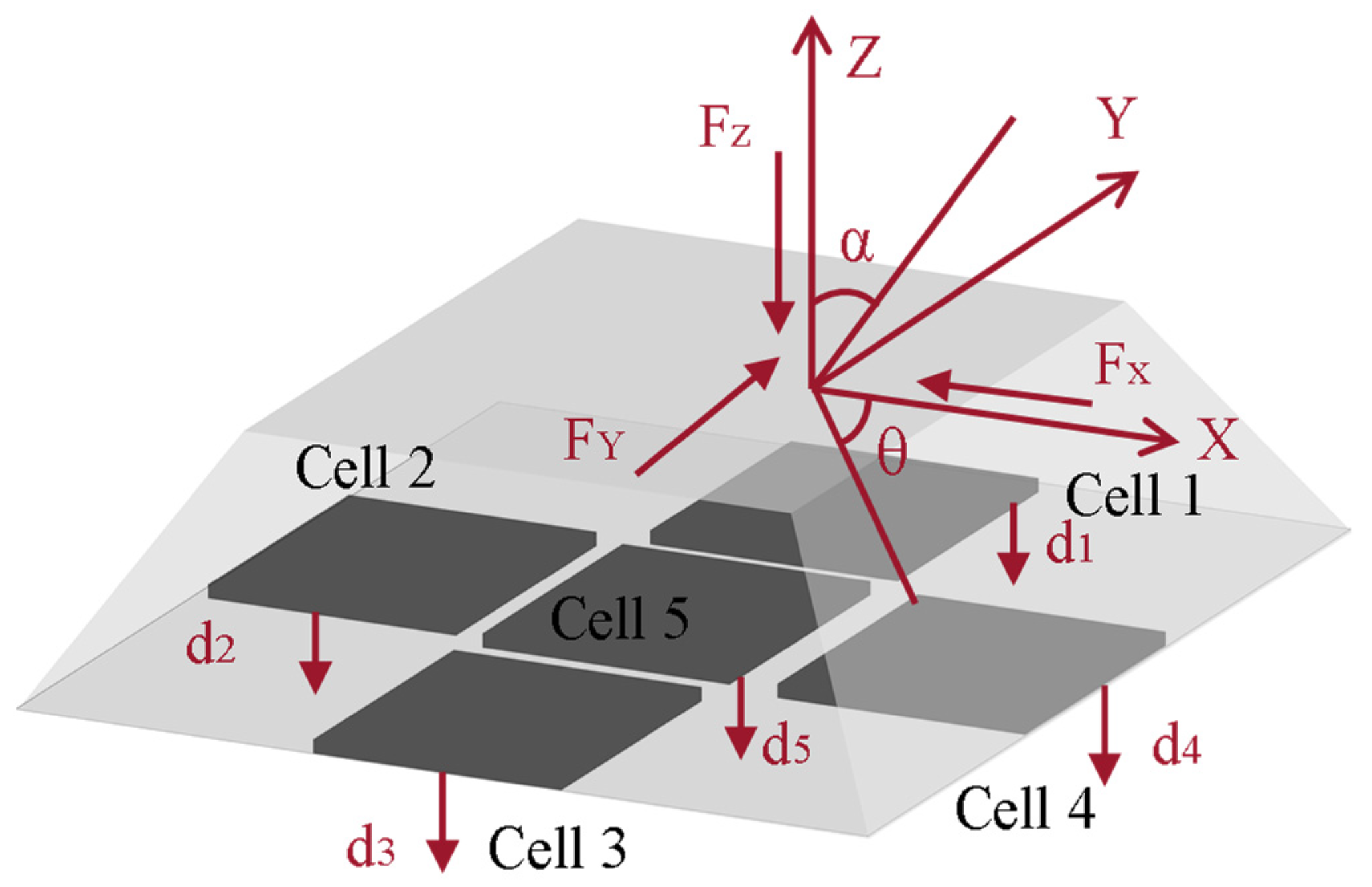
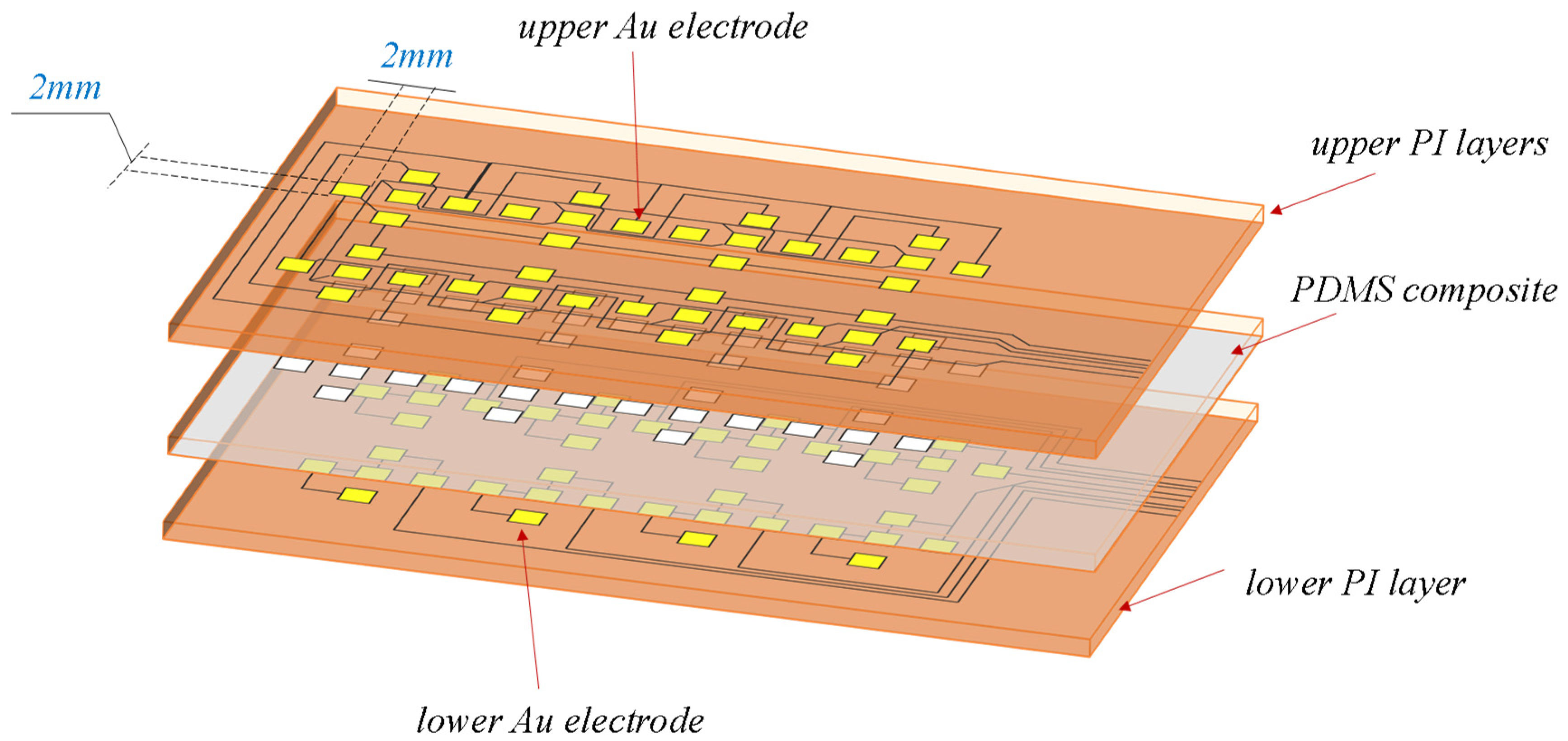
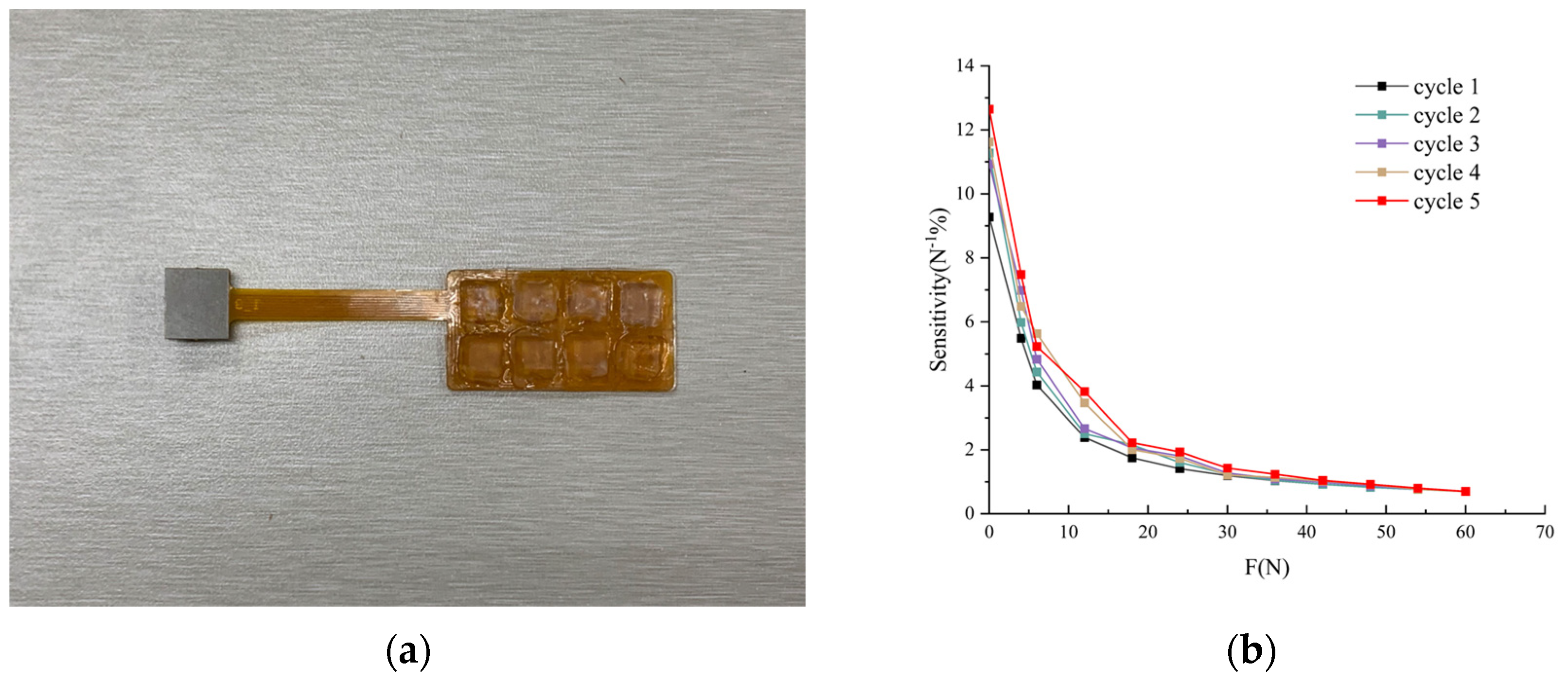
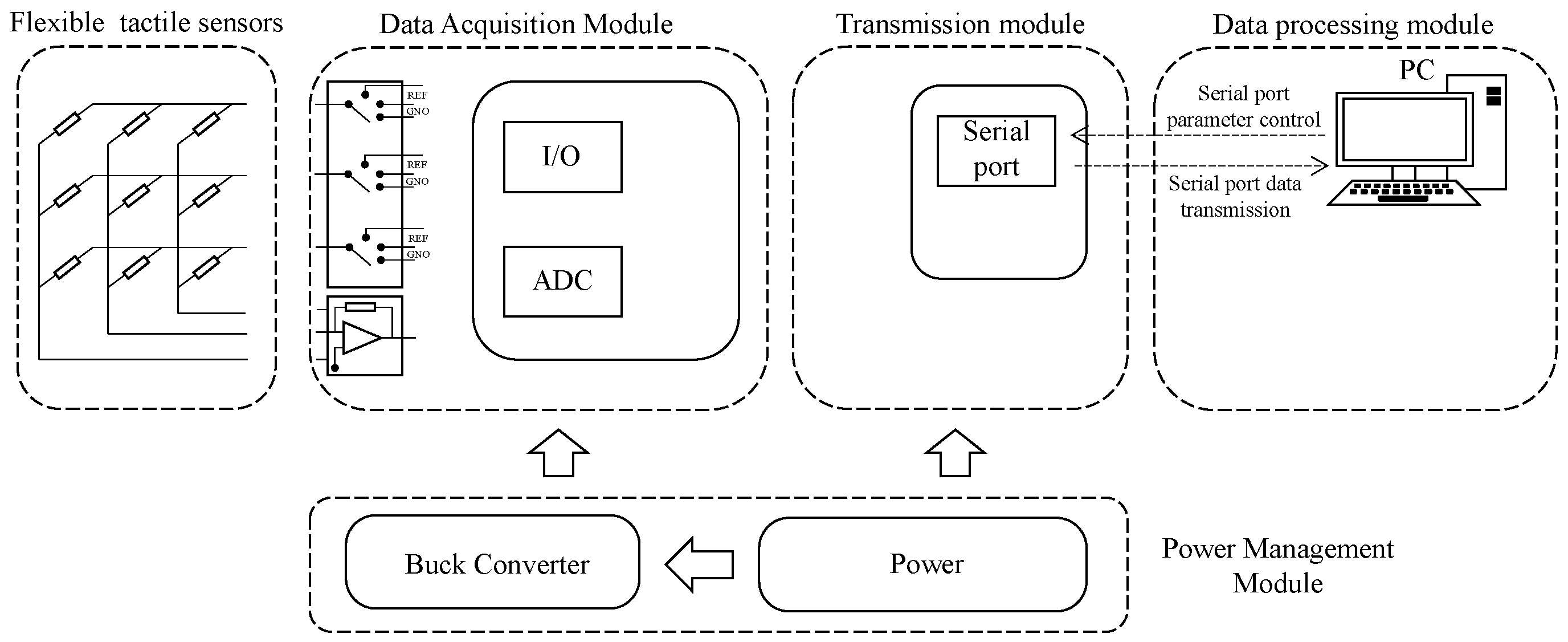
2.1. The Design and Performance of the Tactile Sensor Array
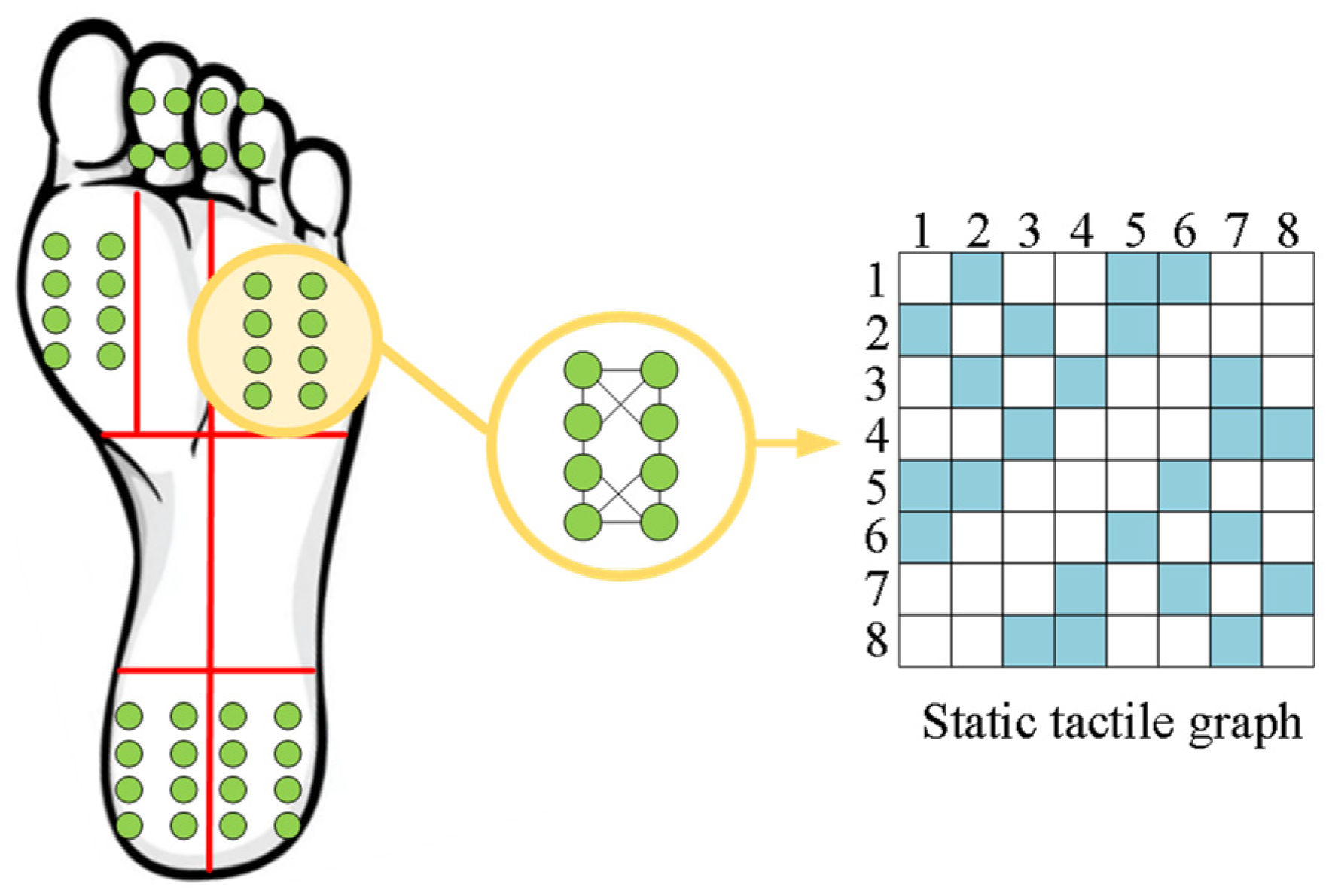
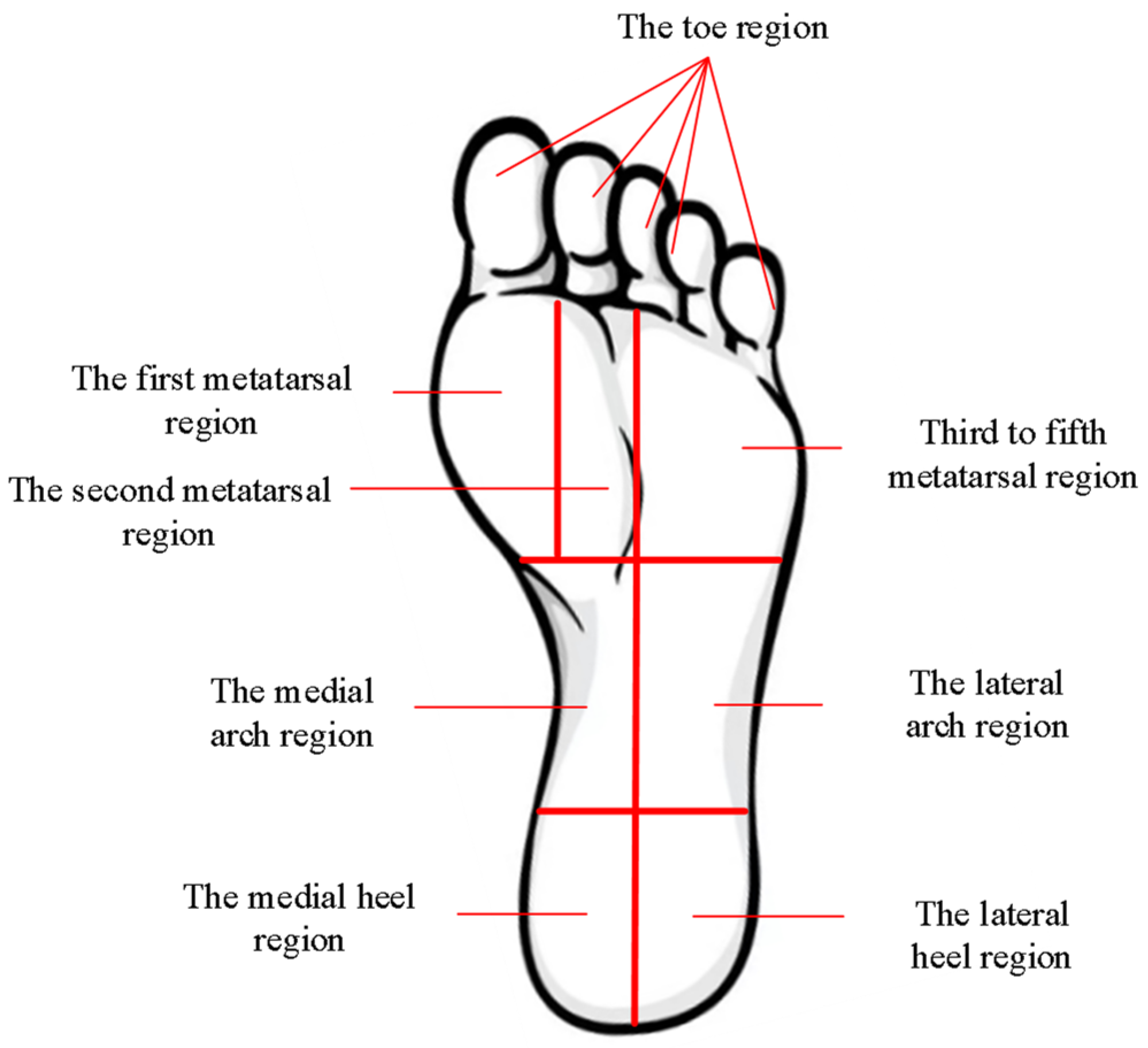
2.2. Analysis of Plantar Tactile Sensor Layout
2.3. A Fall Detection Method Based on GCN-LSTM Multi-Task Learning
2.3.1. Problem Formulation
2.3.2. Graph Convolution Neural Network (GCN)
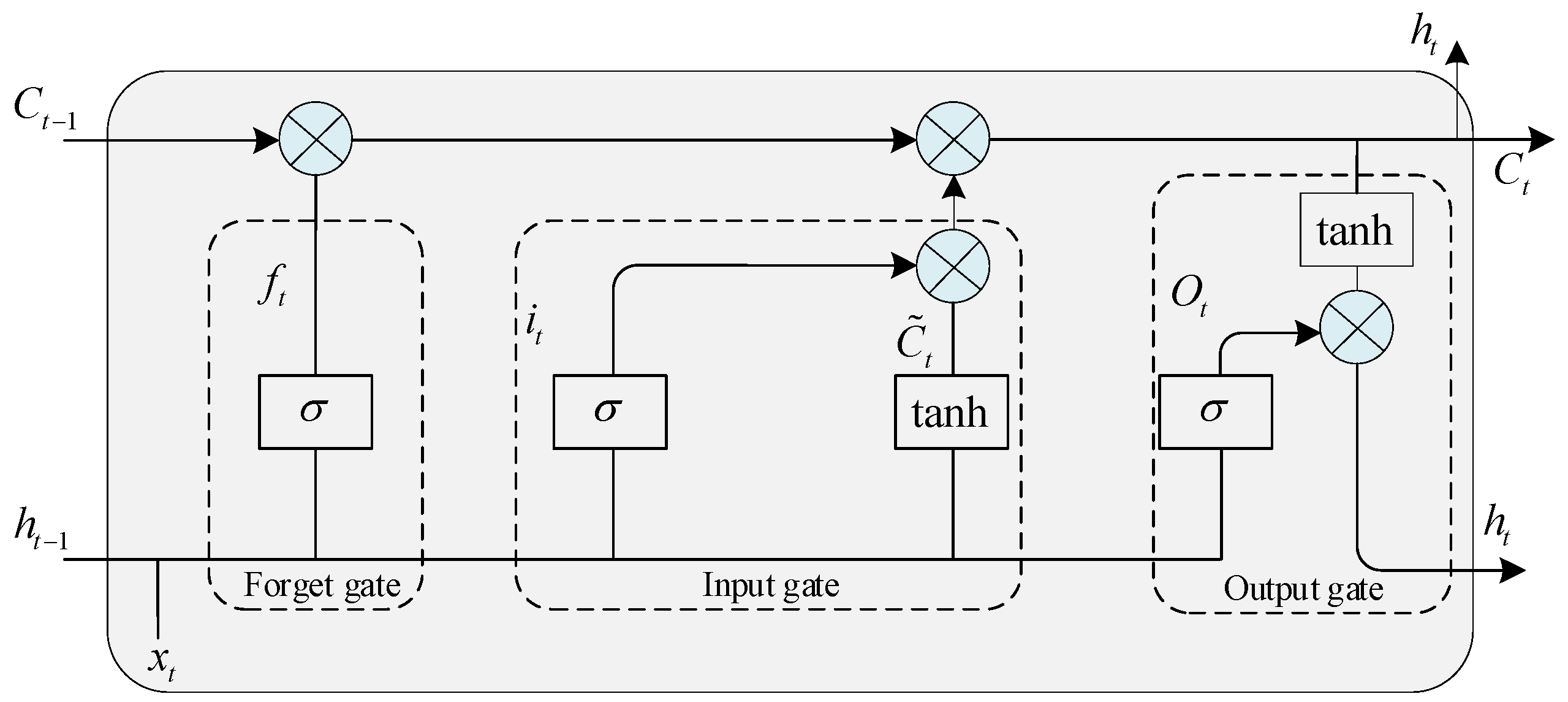
2.3.3. Long Short-Term Memory Network (LSTM)
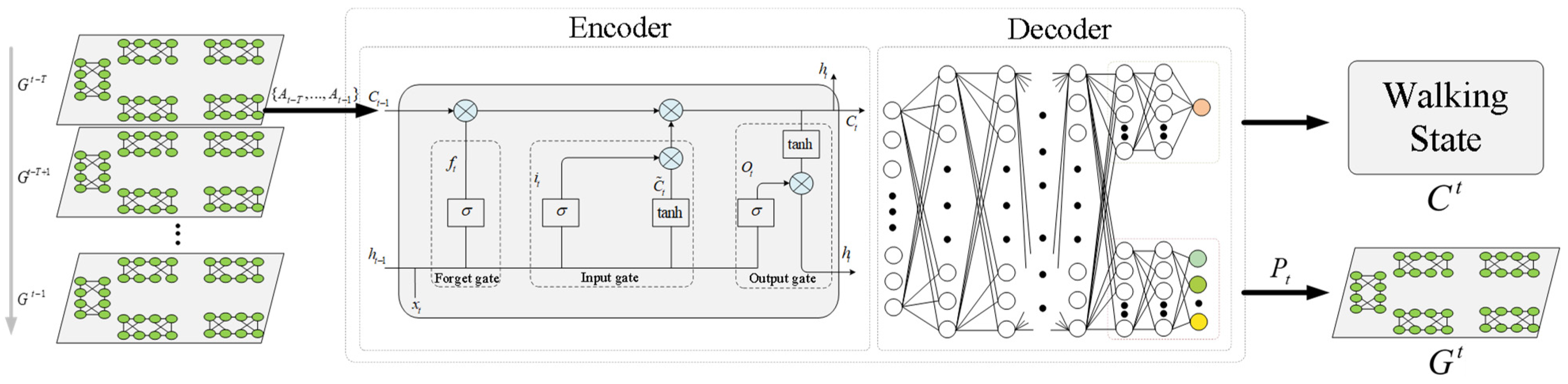
2.3.4. GCN-LSTM Based on Multi-Task Learning
3. Results
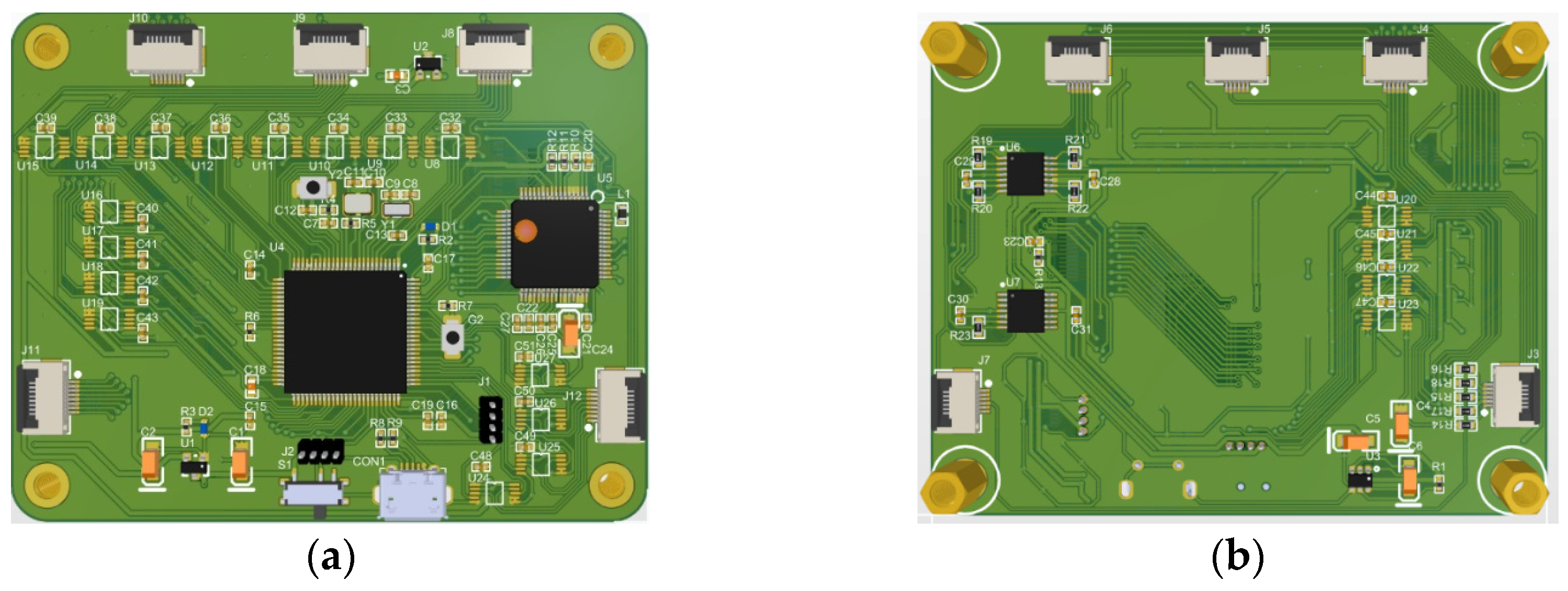
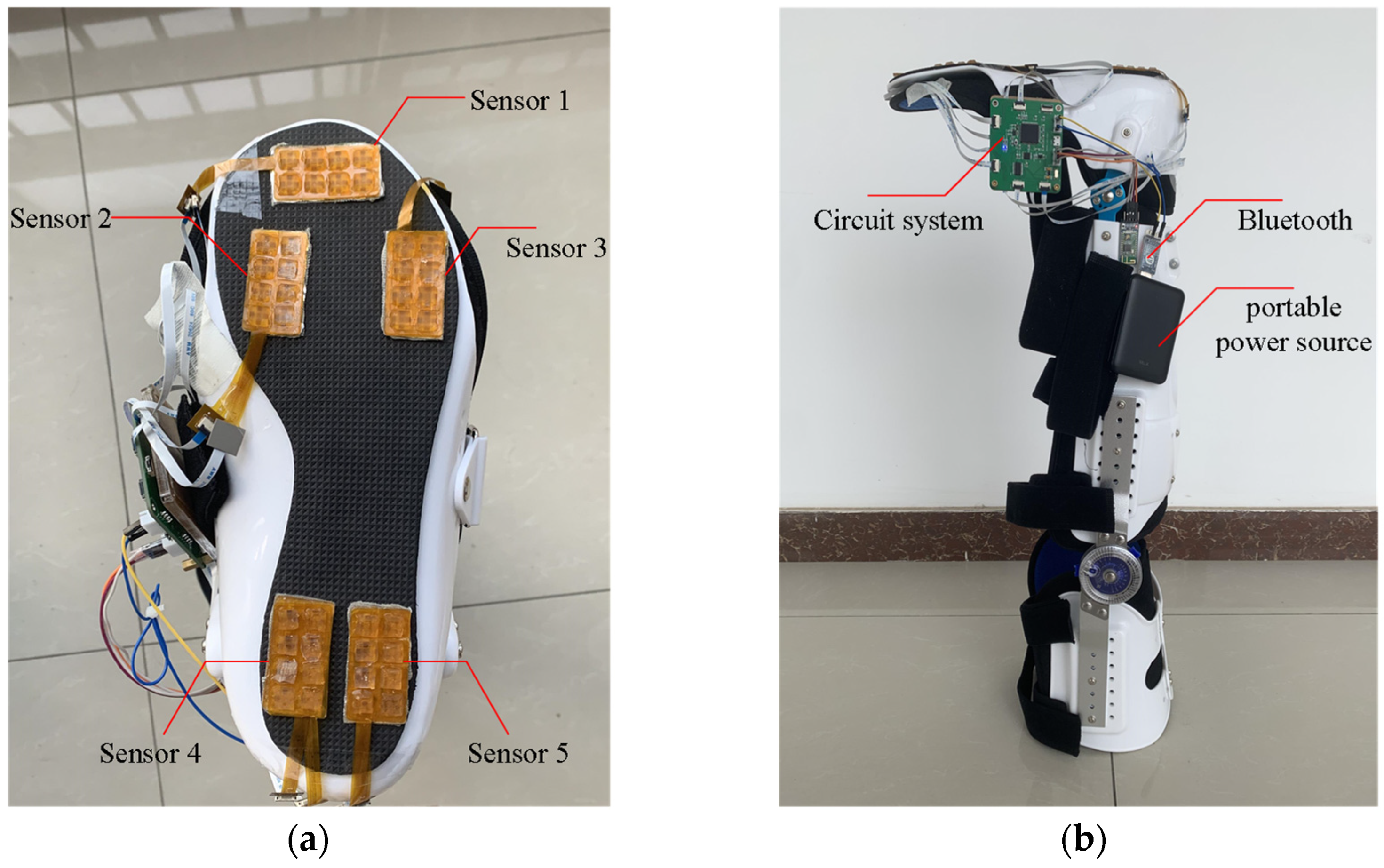
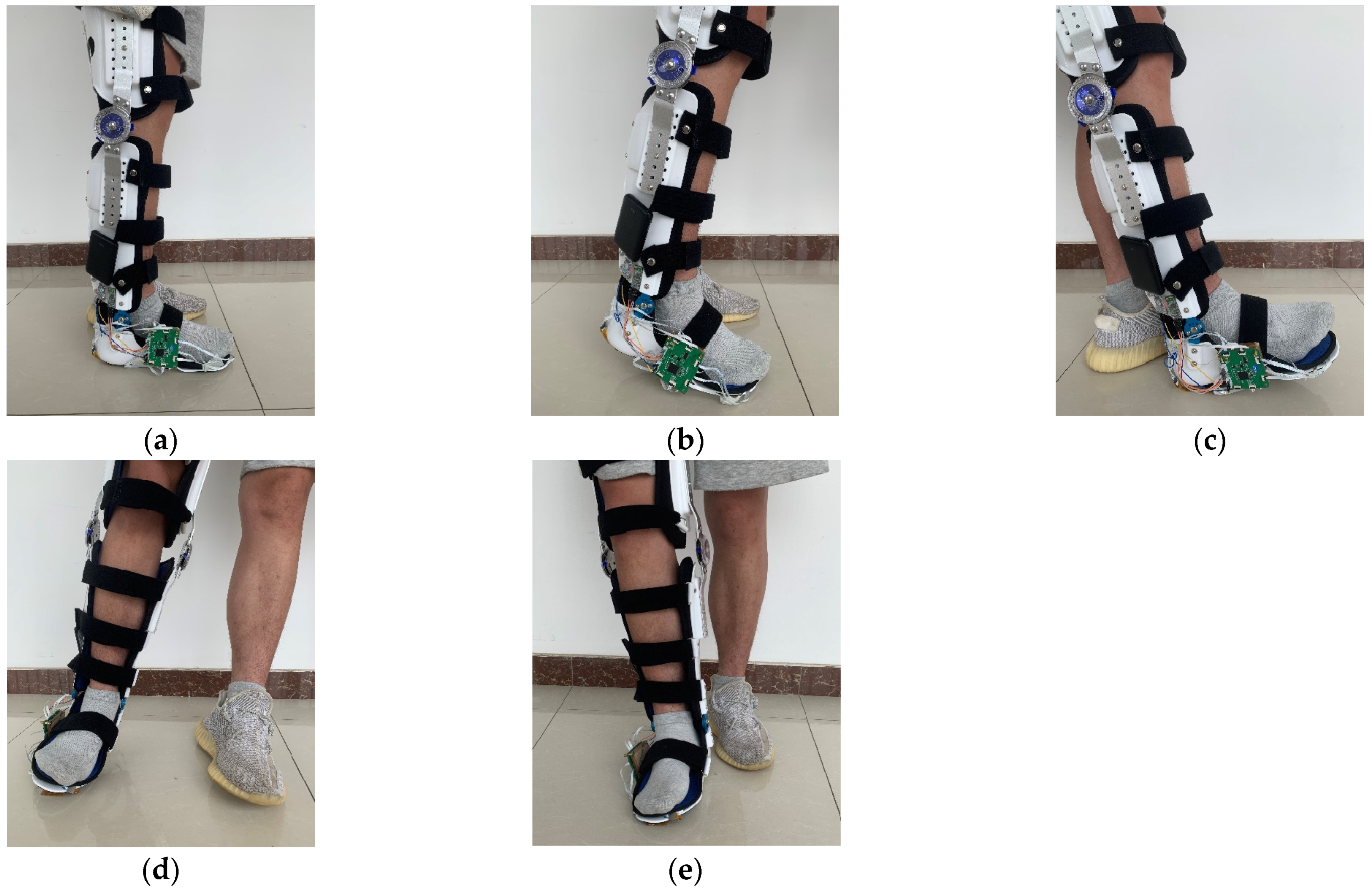
3.1. Integrated Nursing Aids with Multiple Flexible Tactile Sensor Arrays
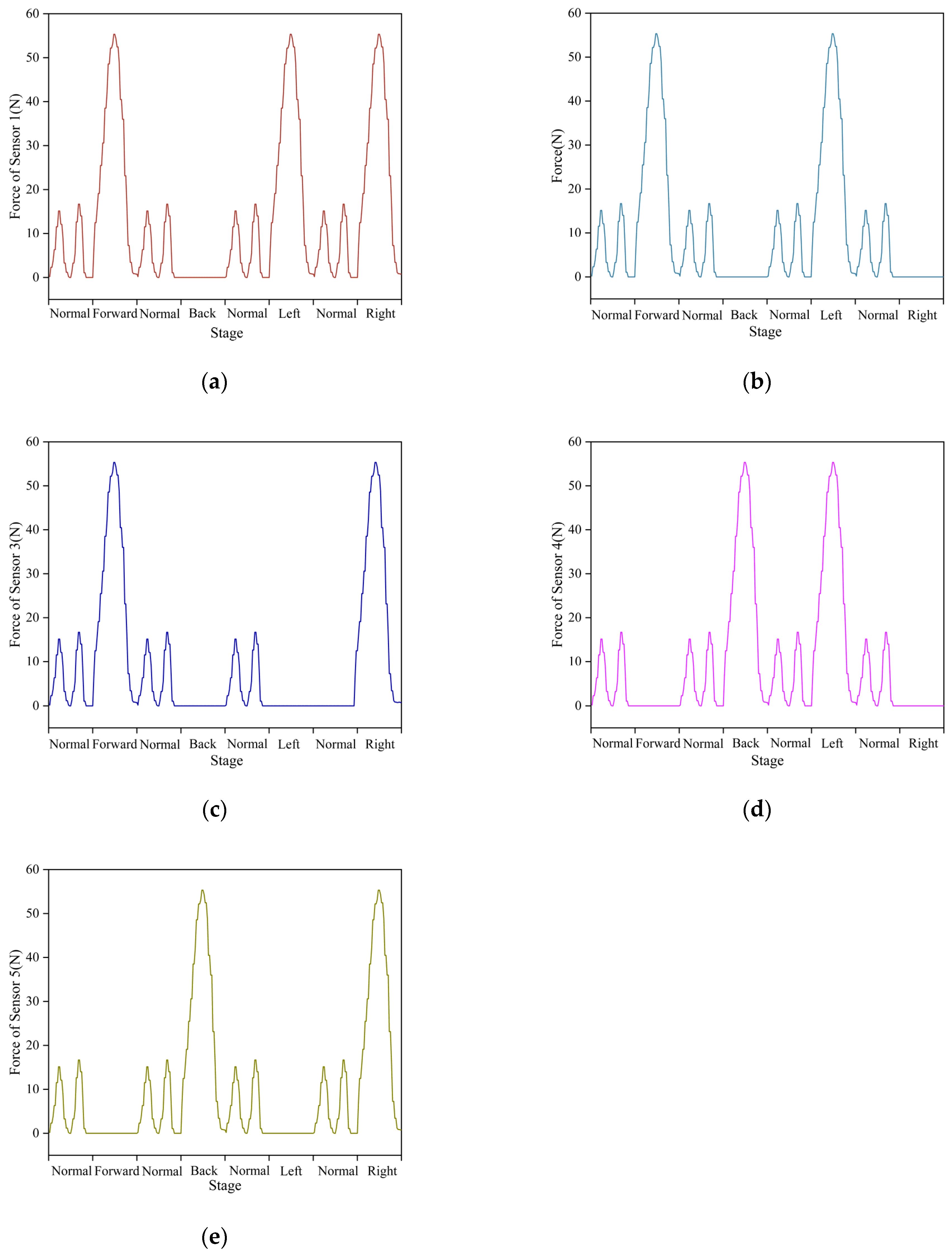
3.2. Construction of the Tactile Sequences Dataset for Fall Detection
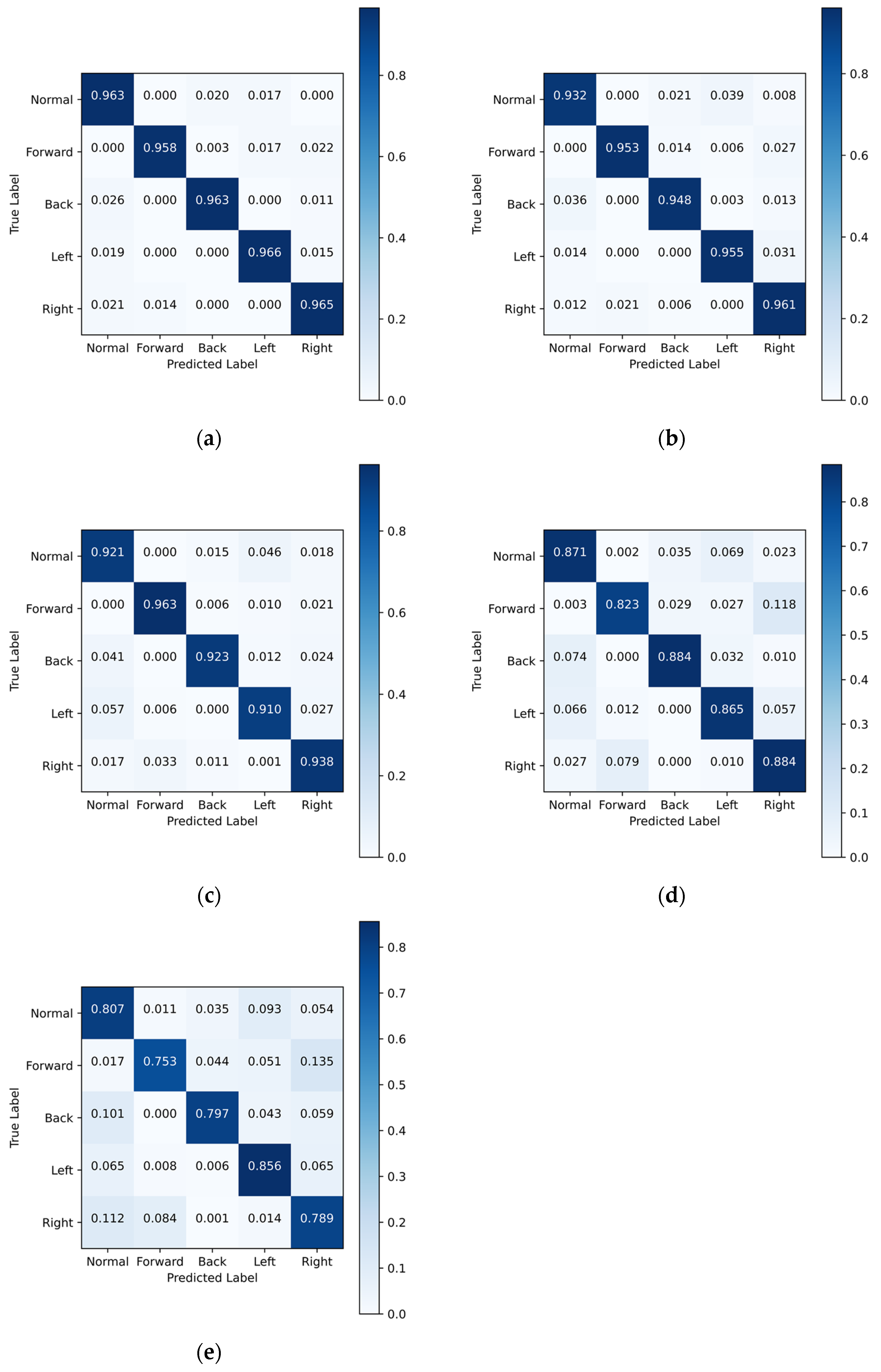
3.3. Model Performance Testing and Comparison
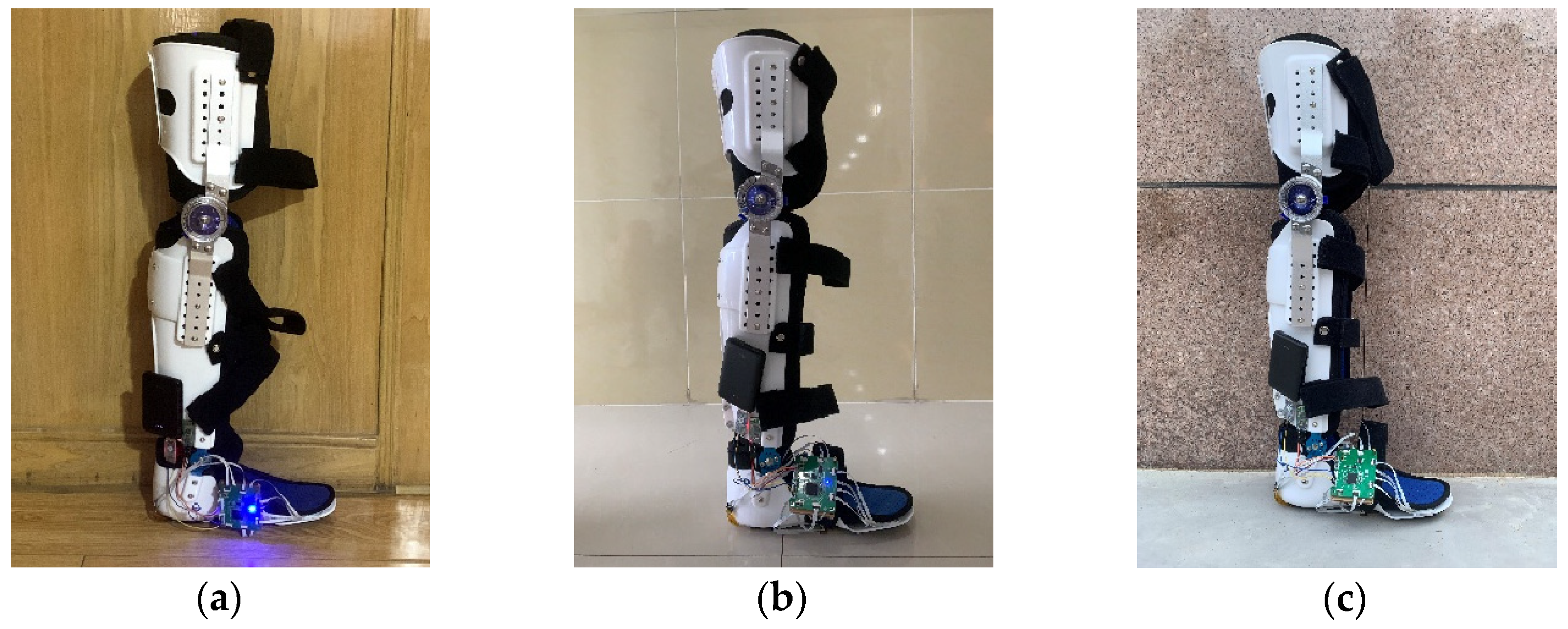
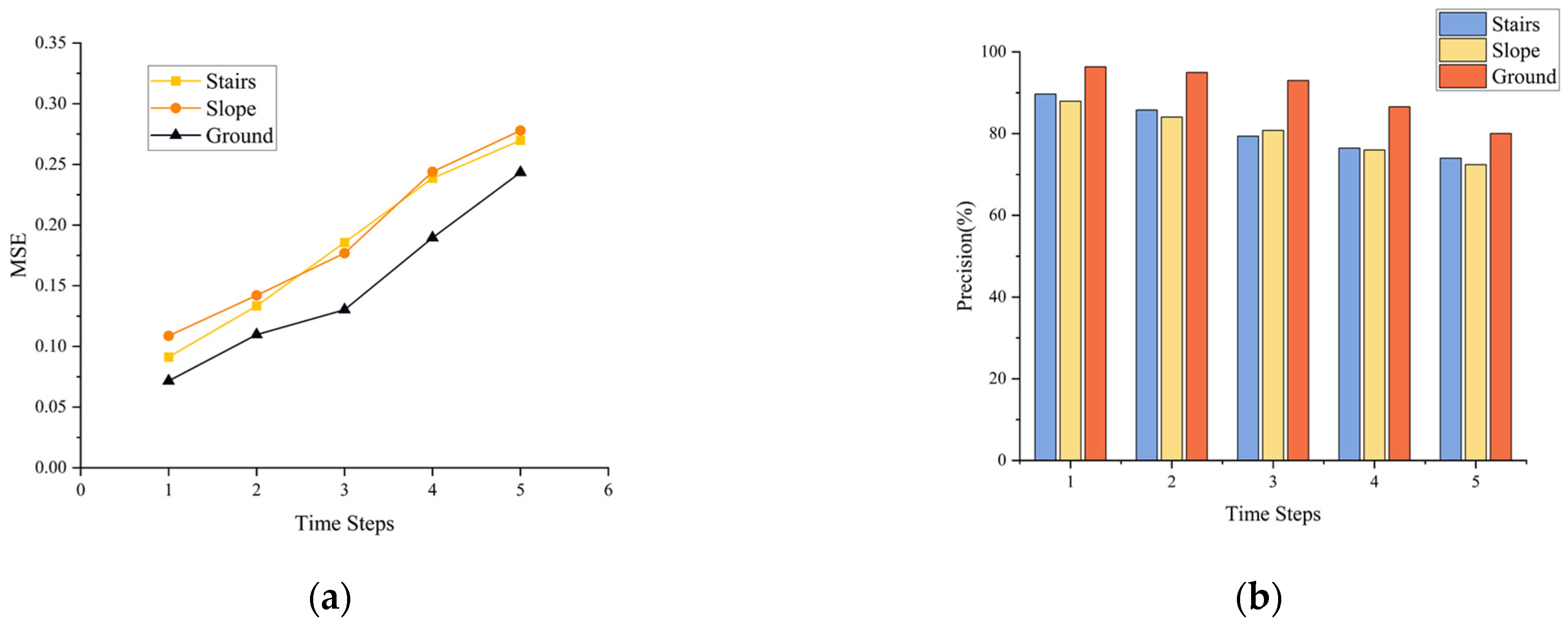
3.4. Generalization Testing of Fall Detection on Different Ground Types
3.5. Generalization Testing of Fall Detection on Different Ground Morphologies
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Momtaz, Y.A.; Hamid, T.A.; Yahaya, N.; Ibrahim, R. Effects of Chronic Comorbidity on Psychological Well-being Among Older Persons in Northern Peninsular Malaysia. Appl. Res. Qual. Life 2010, 5, 133–146. [Google Scholar] [CrossRef]
- Fernandes, F.; Turra, C.M.; Rios-Neto, E.L. World population aging as a function of period demographic conditions. Demogr. Res. 2023, 48, 353–372. [Google Scholar] [CrossRef]
- Sahoo, P.M.; Rout, H.S.; Jakovljevic, M. Consequences of India’s population aging to its healthcare financing and provision. J. Med. Econ. 2023, 26, 308–315. [Google Scholar] [CrossRef] [PubMed]
- Zahari, Z.; Abd Rahim, M.F.; Justine, M. Environmental Hazards and Falls among Elderly with Low Back Pain. Environ. Behav. Proc. J. 2022, 7, 179–184. [Google Scholar] [CrossRef]
- Ardaneh, M.; Fararouei, M.; Hassanzadeh, J. Falls leading to fracture and nutrition among older adults: A case–control study. J. Health Popul. Nutr. 2023, 42, 18. [Google Scholar] [CrossRef]
- Blain, H.; Masud, T.; Dargent-Molina, P.; Martin, F.C.; Rosendahl, E.; van der Velde, N.; Bousquet, J.; Benetos, A.; Cooper, C.; Kanis, J.A. A comprehensive fracture prevention strategy in older adults: The European Union Geriatric Medicine Society (EUGMS) statement. J. Nutr. Health Aging 2016, 20, 647–652. [Google Scholar] [CrossRef]
- Vieira, E.R.; Tappen, R.; Engstrom, G.; da Costa, B.R. Rates and factors associated with falls in older European Americans, Afro-Caribbeans, African-Americans, and Hispanics. Clin. Interv. Aging 2015, 10, 1705–1710. [Google Scholar] [CrossRef]
- Ang, S.G.M.; O’Brien, A.P.; Amanda Wilson, M. Carers’ concern for older people falling at home: An integrative. Singap. Med. J. 2019, 1, 25. [Google Scholar] [CrossRef]
- Joshi, A.; Rajabali, F.; Turcotte, K.; Beaton, M.D.; Pike, I. Fall-related deaths among older adults in British Columbia: Cause and effect of policy change. Inj. Prev. 2020, 26, 412–416. [Google Scholar] [CrossRef]
- Iamtrakul, P.; Chayphong, S.; Jomnonkwao, S.; Ratanavaraha, V. The association of falls risk in older adults and their living environment: A case study of rural area, Thailand. Sustainability 2021, 13, 13756. [Google Scholar] [CrossRef]
- Kwon, J.; Squires, H.; Young, T. Economic model of community-based falls prevention: Seeking methodological solutions in evaluating the efficiency and equity of UK guideline recommendations. BMC Geriatr. 2023, 23, 187. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.; Squires, H.; Franklin, M.; Lee, Y.; Young, T. Economic evaluation of community-based falls prevention interventions for older populations: A systematic methodological overview of systematic reviews. BMC Health Serv. Res. 2022, 22, 401. [Google Scholar] [CrossRef] [PubMed]
- El-Khoury, F.; Cassou, B.; Charles, M.-A.; Dargent-Molina, P. The effect of fall prevention exercise programmes on fall induced injuries in community dwelling older adults: Systematic review and meta-analysis of randomised controlled trials. BMJ 2013, 347, f6234. [Google Scholar] [PubMed]
- Ebihara, S.; Otsubo, Y.; Miyagi, M. Role of physical therapists and aromatherapy for fall prevention in older people: A narrative review. Geriatr. Gerontol. Int. 2021, 21, 445–450. [Google Scholar] [CrossRef]
- Mackenzie, L.; McIntyre, A. How do general practitioners (GPs) engage in falls prevention with older people? A pilot survey of GPs in NHS England suggests a gap in routine practice to address falls prevention. Front. Public Health 2019, 7, 32. [Google Scholar] [CrossRef] [PubMed]
- Luukinen, H.; Herala, M.; Koski, K.; Honkanen, R.; Laippala, P.; Kivelä, S.-L. Fracture risk associated with a fall according to type of fall among the elderly. Osteoporos. Int. 2000, 11, 631–634. [Google Scholar] [CrossRef]
- Hsieh, C.-Y.; Shi, W.-T.; Huang, H.-Y.; Liu, K.-C.; Hsu, S.J.; Chan, C.-T. Machine learning-based fall characteristics monitoring system for strategic plan of falls prevention. In Proceedings of the 2018 IEEE International Conference on Applied System Invention (ICASI), Chiba, Japan, 13–17 April 2018; pp. 818–821. [Google Scholar]
- Turan, M.Ş.; Barshan, B. Classification of fall directions via wearable motion sensors. Digit. Signal Process. 2022, 125, 103129. [Google Scholar] [CrossRef]
- Maldonado-Bascon, S.; Iglesias-Iglesias, C.; Martín-Martín, P.; Lafuente-Arroyo, S. Fallen people detection capabilities using assistive robot. Electronics 2019, 8, 915. [Google Scholar] [CrossRef]
- Han, Q.; Zhao, H.; Min, W.; Cui, H.; Zhou, X.; Zuo, K.; Liu, R. A two-stream approach to fall detection with MobileVGG. IEEE Access 2020, 8, 17556–17566. [Google Scholar] [CrossRef]
- Andò, B.; Baglio, S.; Lombardo, C.O.; Marletta, V. A multisensor data-fusion approach for ADL and fall classification. IEEE Trans. Instrum. Meas. 2016, 65, 1960–1967. [Google Scholar] [CrossRef]
- Chalvatzaki, G.; Koutras, P.; Hadfield, J.; Papageorgiou, X.S.; Tzafestas, C.S.; Maragos, P. LSTM-based network for human gait stability prediction in an intelligent robotic rollator. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 4225–4232. [Google Scholar]
- Duclos, C.; Miéville, C.; Gagnon, D.; Leclerc, C. Dynamic stability requirements during gait and standing exergames on the wii fit system in the elderly. J. NeuroEng. Rehabil. 2012, 9, 28. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Song, Y.; Shang, Y.; Wang, J. Posture recognition algorithm for the elderly based on BP neural networks. In Proceedings of the 27th Chinese Control and Decision Conference (2015 CCDC), Qingdao, China, 23–25 May 2015. [Google Scholar]
- Wei, X. Research on the Falling Detection System for Elderly-assistant and Walking-assistant Robot. J. Phys. Conf. Ser. 2019, 1302, 032014. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, X. An approach for fall detection of older population based on multi-sensor data fusion. In Proceedings of the 2015 12th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Goyang, Republic of Korea, 28–30 October 2015; pp. 320–323. [Google Scholar]
- Xue, N.; Liu, C.; Sun, J.; Li, T.; Chi, C.; Hee, H.; Wang, Y. Miniature force sensing system for monitoring of optimal cricoid pressure for airway protection. IEEE Sens. J. 2018, 18, 4303–4310. [Google Scholar] [CrossRef]
- Xue, N.; Gao, G.; Sun, J.; Liu, C.; Li, T.; Chi, C. Systematic study and experiment of a flexible pressure and tactile sensing array for wearable devices applications. J. Micromech. Microeng. 2018, 28, 075019. [Google Scholar] [CrossRef]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot Plantar Pressure Measurement System: A Review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef]
- Li, X.; Wang, K.; Wang, Y.L.; Wang, K.C. Plantar pressure measurement system based on piezoelectric sensor: A review. Sensor Rev. 2022, 42, 241–249. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, R.; Fei, C.; Zia, A.W.; Jing, L. Flexible sensor matrix film-based wearable plantar pressure force measurement and analysis system. PLoS ONE 2020, 15, e0237090. [Google Scholar] [CrossRef]
- Xi, X.; Jiang, W.; Lü, Z.; Miran, S.M.; Luo, Z.Z. Daily Activity Monitoring and Fall Detection Based on Surface Electromyography and Plantar Pressure. Complexity 2020, 2020, 9532067. [Google Scholar] [CrossRef]
- Hallemans, A.; D’Août, K.; De Clercq, D.; Aerts, P. Pressure distribution patterns under the feet of new walkers: The first two months of independent walking. Foot Ankle Int. 2003, 24, 444–453. [Google Scholar] [CrossRef]
- Orlin, M.N.; McPoil, T.G. Plantar pressure assessment. Phys. Ther. 2000, 80, 399–409. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Jelizaveta, K.; Agostino, S.; Kaspar, A. Fingertip Fiber Optical Tactile Array with Two-Level Spring Structure. Sensors 2017, 17, 2337. [Google Scholar]
- Kim, H.Y.; Won, C.H. Forecasting the Volatility of Stock Price Index: A Hybrid Model Integrating LSTM with Multiple GARCH-Type Models. Expert Syst. Appl. 2018, 103, 25–37. [Google Scholar] [CrossRef]
- Wang, Y.; Gan, D.; Sun, M.; Zhang, N.; Zongxiang, L. Probabilistic Individual Load Forecasting using Pinball Loss Guided LSTM. Appl. Energy 2019, 235, 10–20. [Google Scholar] [CrossRef]
- Bukhari, A.H.; Raja, M.A.Z.; Sulaiman, M.; Islam, S.; Kumam, P. Fractional neuro-sequential ARFIMA-LSTM for financial market forecasting. IEEE Access 2020, 8, 71326–71338. [Google Scholar] [CrossRef]
- Poongodi, M.; Sharma, A.; Vijayakumar, V.; Bhardwaj, V.; Kumar, R. Prediction of the price of Ethereum blockchain cryptocurrency in an industrial finance system. Comput. Electr. Eng. 2019, 81, 106527. [Google Scholar]
- Jordan, M.I. Serial order: A parallel distributed processing approach. In Advances in Psychology; Elsevier: Amsterdam, The Netherlands, 1997; Volume 121, pp. 471–495. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| Activation function | |
| The input feature vector at the current time step | |
| The hidden state of the previous time step | |
| Hyperbolic tangent activation function. | |
| The cell state at the current time step | |
| The output of the input gate | |
| The output of the forget gate | |
| The output of the output gate | |
| Update of the state |
| Model | Time Steps | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| LR [40] | 0.2093 | 0.2431 | 0.2733 | 0.3394 | 0.3725 |
| RNN [41] | 0.1348 | 0.1687 | 0.2302 | 0.2677 | 0.2939 |
| LSTM [42] | 0.1203 | 0.1605 | 0.2465 | 0.2581 | 0.2913 |
| FCNN [43] | 0.1687 | 0.2189 | 0.2511 | 0.3347 | 0.3601 |
| GCN-LSTM(ours) | 0.0716 | 0.1097 | 0.1302 | 0.1896 | 0.2434 |
| Time Steps | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Precision | 96.36 | 94.98 | 93.01 | 86.56 | 80.03 |
| Recall | 95.12 | 93.88 | 92.61 | 84.97 | 79.54 |
| F1 Score | 95.74 | 94.43 | 92.81 | 85.76 | 79.78 |
| Time(ms) | 2.3 | 2.3 | 2.3 | 2.3 | 2.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Yan, Y.; Yin, M.; An, J.; Chen, G.; Wang, Y.; Liu, C.; Xue, N. Elderly Fall Detection Based on GCN-LSTM Multi-Task Learning Using Nursing Aids Integrated with Multi-Array Flexible Tactile Sensors. Biosensors 2023, 13, 862. https://doi.org/10.3390/bios13090862
Li T, Yan Y, Yin M, An J, Chen G, Wang Y, Liu C, Xue N. Elderly Fall Detection Based on GCN-LSTM Multi-Task Learning Using Nursing Aids Integrated with Multi-Array Flexible Tactile Sensors. Biosensors. 2023; 13(9):862. https://doi.org/10.3390/bios13090862
Chicago/Turabian StyleLi, Tong, Yuhang Yan, Minghui Yin, Jing An, Gang Chen, Yifan Wang, Chunxiu Liu, and Ning Xue. 2023. "Elderly Fall Detection Based on GCN-LSTM Multi-Task Learning Using Nursing Aids Integrated with Multi-Array Flexible Tactile Sensors" Biosensors 13, no. 9: 862. https://doi.org/10.3390/bios13090862
APA StyleLi, T., Yan, Y., Yin, M., An, J., Chen, G., Wang, Y., Liu, C., & Xue, N. (2023). Elderly Fall Detection Based on GCN-LSTM Multi-Task Learning Using Nursing Aids Integrated with Multi-Array Flexible Tactile Sensors. Biosensors, 13(9), 862. https://doi.org/10.3390/bios13090862