A Novel Perturbed Spiral Sheathless Chip for Particle Separation Based on Traveling Surface Acoustic Waves (TSAW)


Abstract
:1. Introduction
2. Materials and Methods
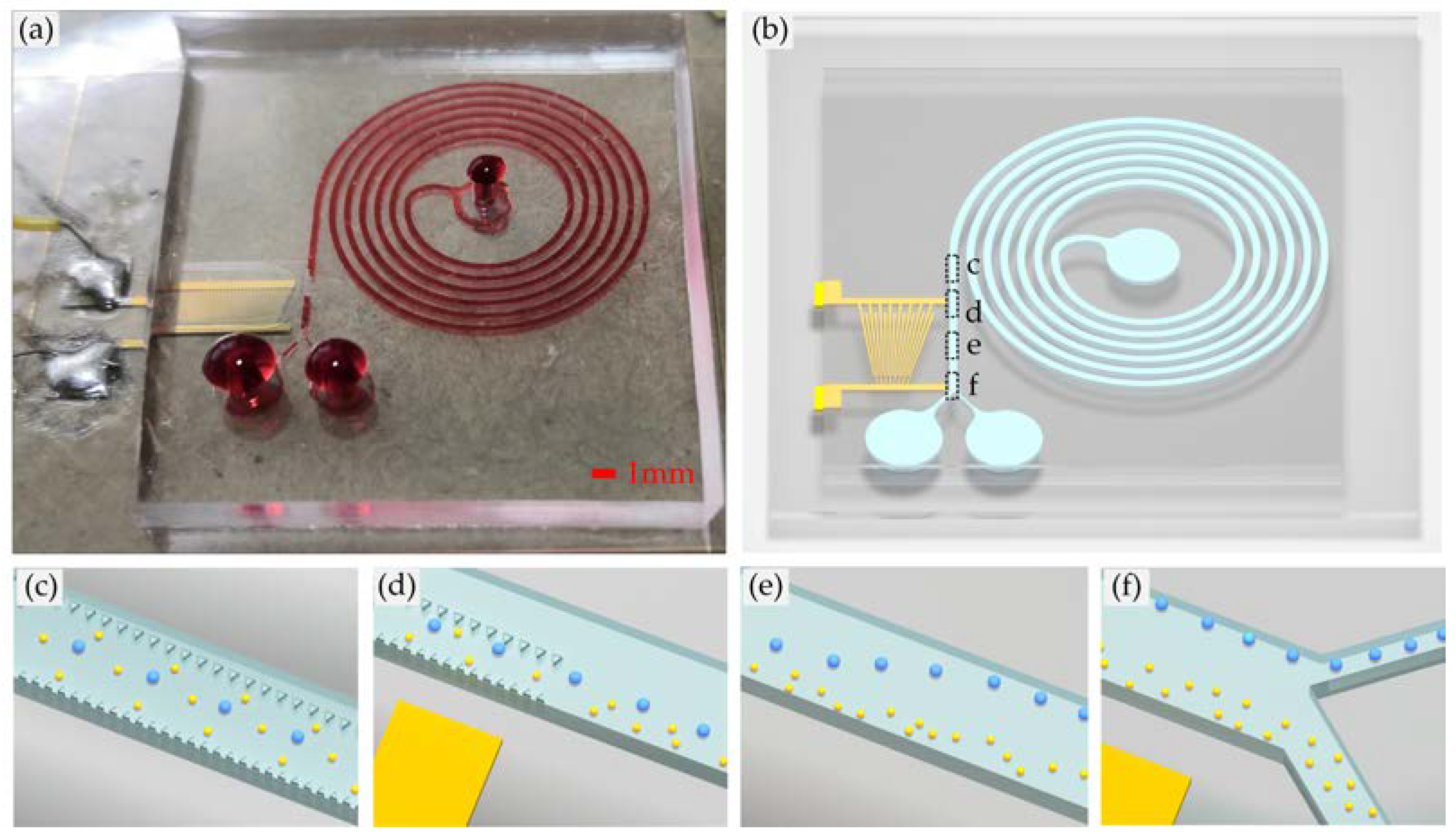
2.1. Design of the Microfluidic Separation Chip
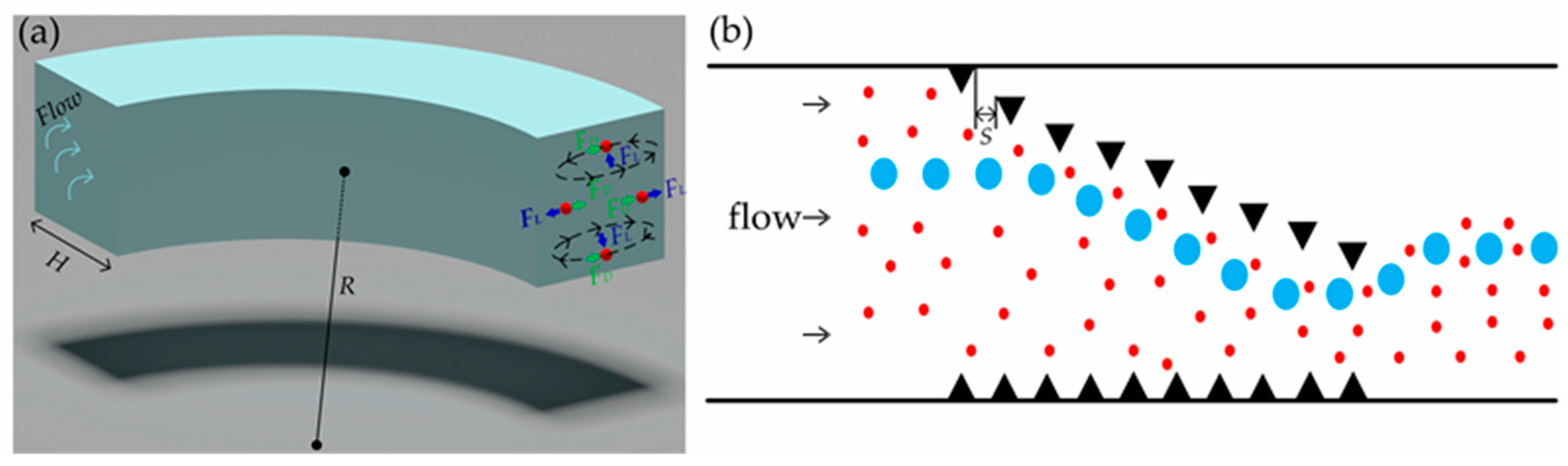
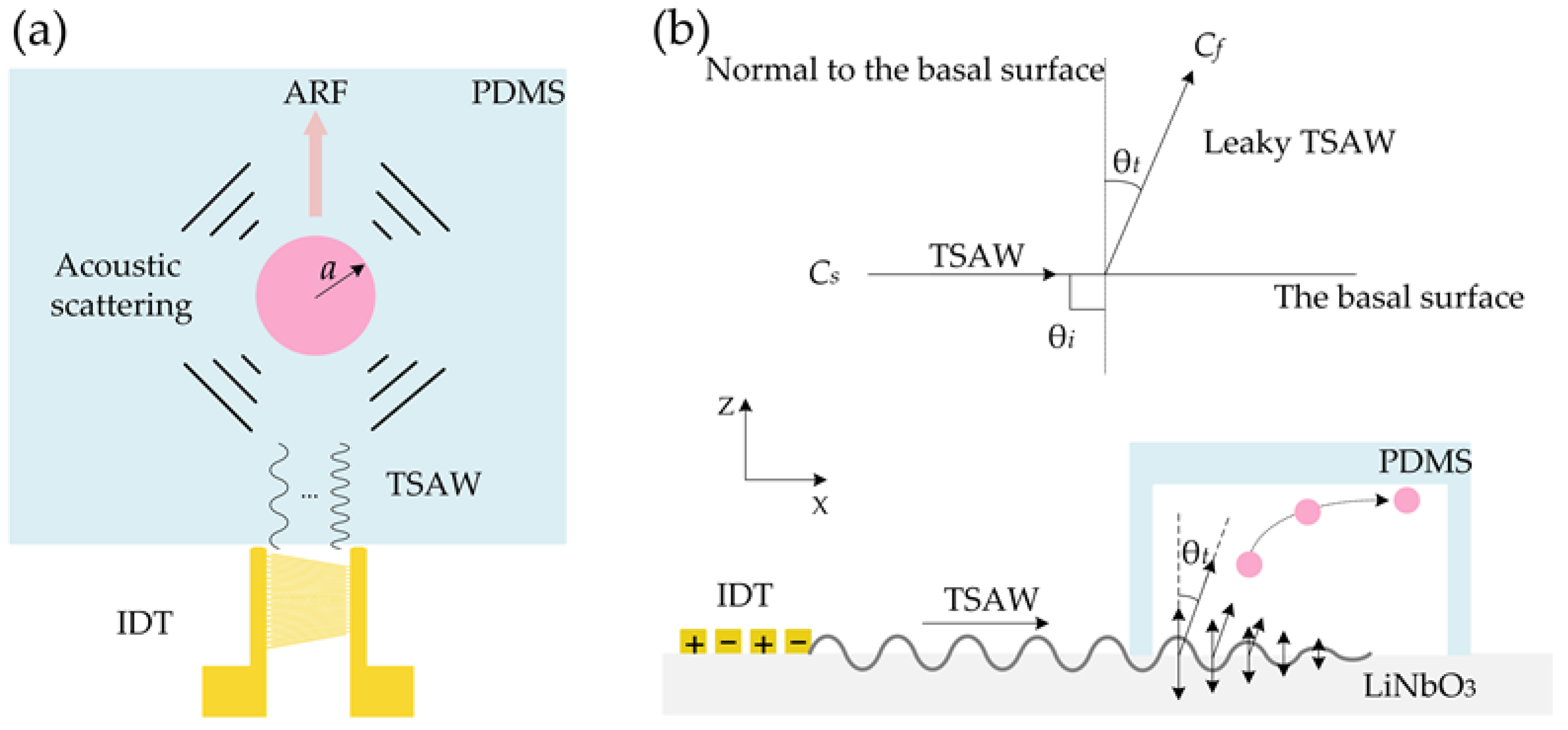
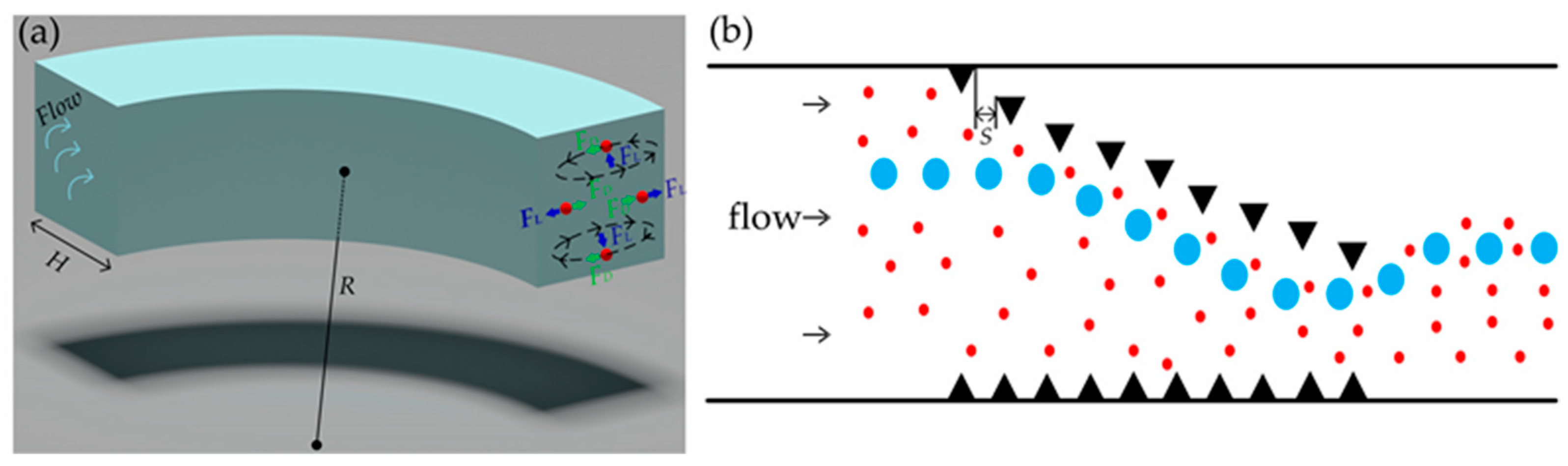
2.2. Separation Mechanism
2.3. Fabrication of the Chip
2.4. Sample Preparation and System Setup
3. Results
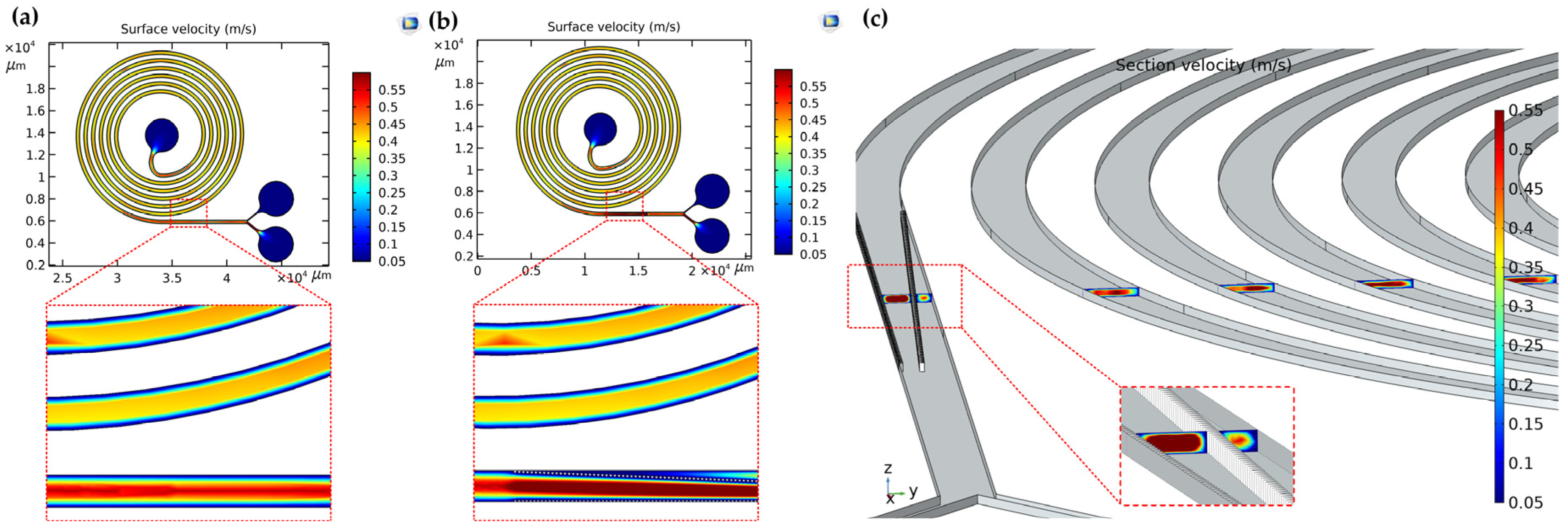
3.1. Simulation of Surface and Section Velocity Distribution in Microchannel
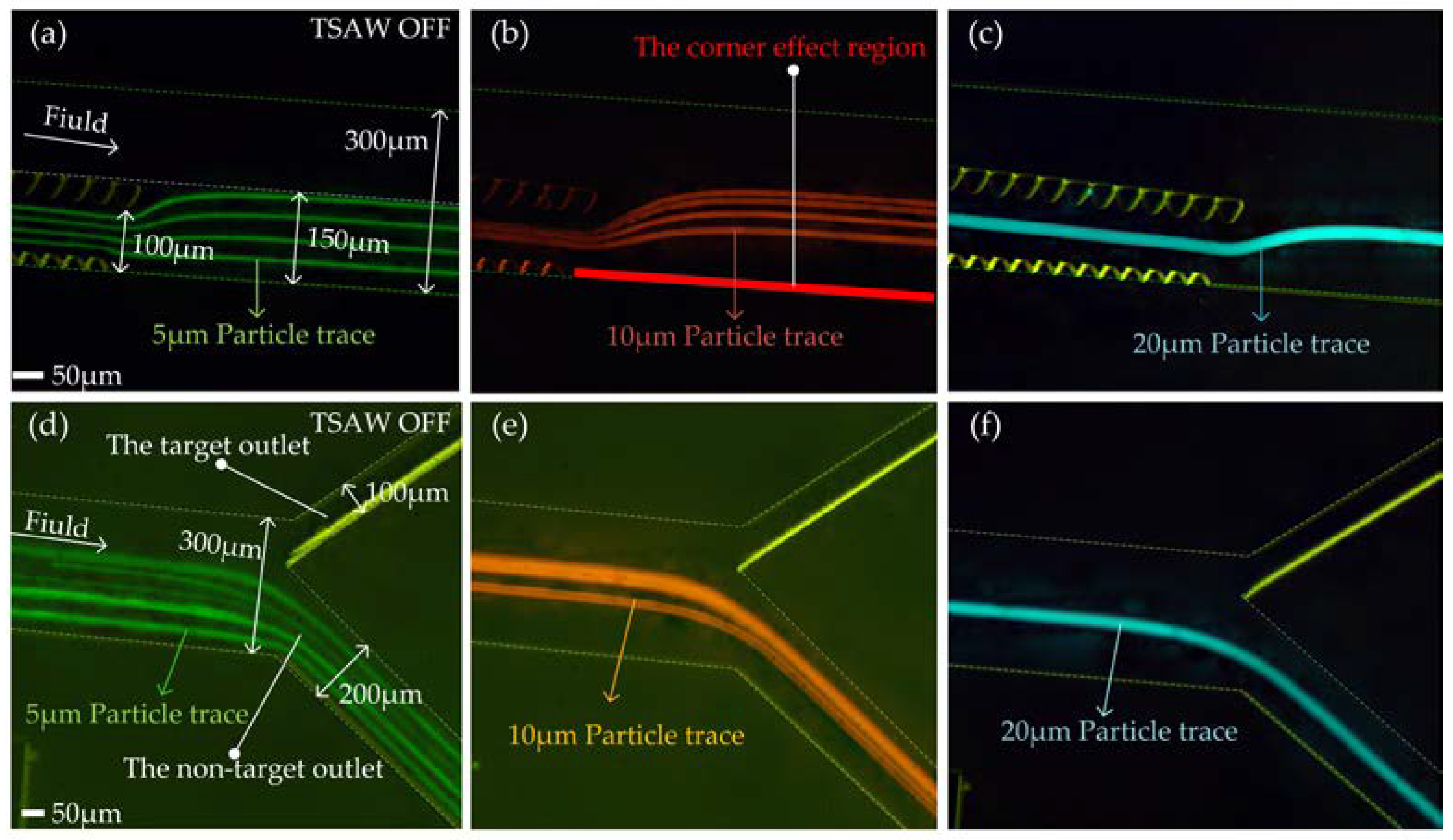
3.2. Related Performance Tests for Micropillar Arrays and Channel Outlets
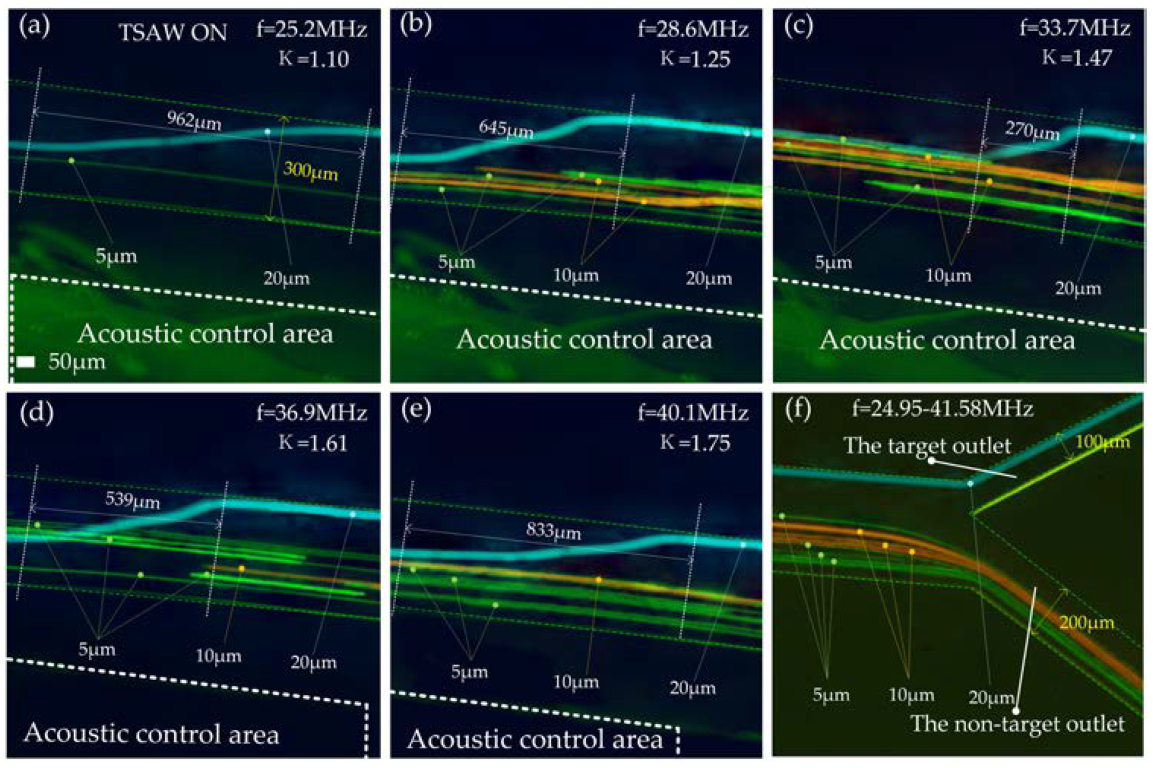
3.3. Acoustic Separation Performance Testing and Analysis
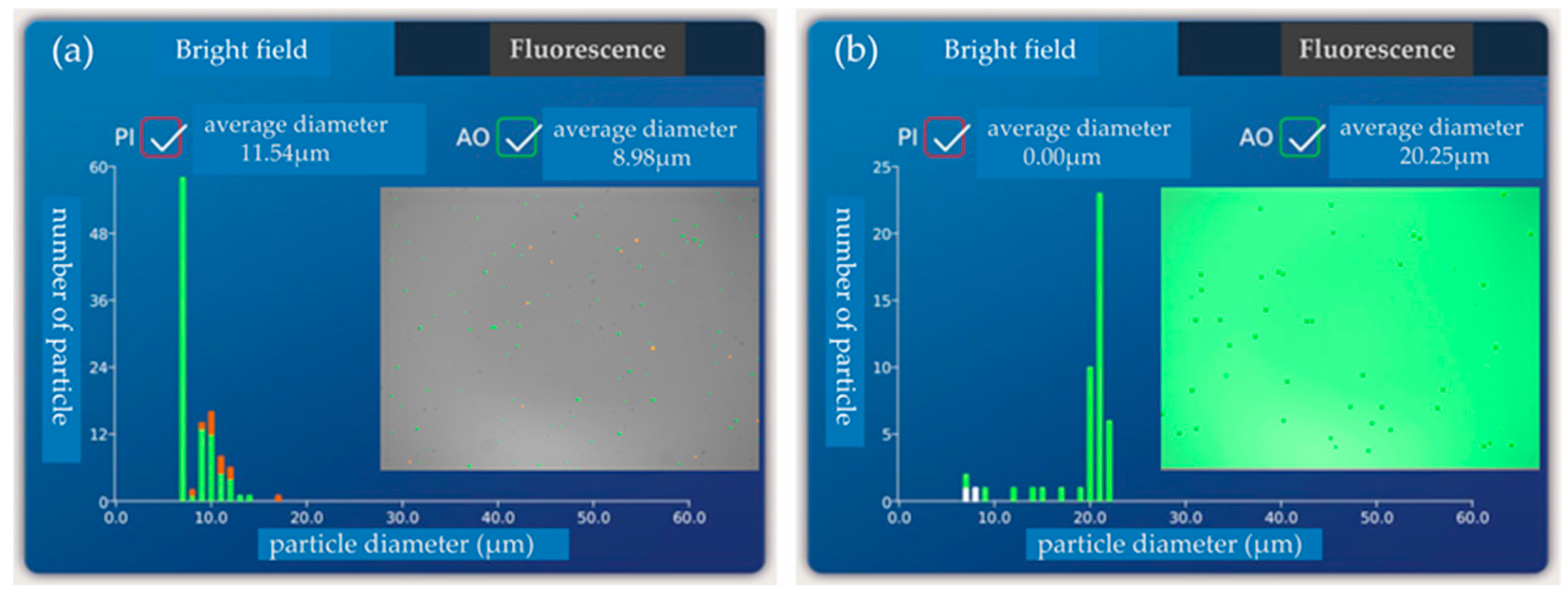
3.4. Testing and Analysis of Separation Purity and Efficiency
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maes, E.; Cools, N.; Willems, H.; Baggerman, G. FACS-Based Proteomics Enables Profiling of Proteins in Rare Cell Populations. Int. J. Mol. Sci. 2020, 21, 6557. [Google Scholar] [CrossRef] [PubMed]
- Okuda, I.; Yamakawa, Y.; Mitani, N.; Ota, N.; Kawabata, M.; Yoshioka, N. Objective evaluation of the relationship between facial expression analysis by the facial action coding system (FACS) and CT/MRI analyses of the facial expression muscles. Ski. Res. Technol. 2020, 26, 727–733. [Google Scholar] [CrossRef] [PubMed]
- Terashima, M.; Kamagata, Y.; Kato, S. Rapid Enrichment and Isolation of Polyphosphate-Accumulating Organisms Through 4′6-Diamidino-2-Phenylindole (DAPI) Staining With Fluorescence-Activated Cell Sorting (FACS). Front. Microbiol. 2020, 11, 793–801. [Google Scholar] [CrossRef] [PubMed]
- Mukherjee, P.; Wang, X.; Zhou, J.; Papautsky, L. Single stream inertial focusing in low aspect-ratio triangular microchannels. Lab Chip 2018, 19, 147–157. [Google Scholar] [CrossRef]
- Tottori, N.; Nisisako, T. Particle/cell separation using sheath-free deterministic lateral displacement arrays with inertially focused single straight input. Lab Chip 2020, 20, 1999–2008. [Google Scholar] [CrossRef]
- Xiang, N.; Li, Q.; Ni, Z. Combining inertial microfluidics with cross-flow filtration for high-fold and high-throughput passive volume reduction. Anal. Chem. 2020, 92, 6770–6776. [Google Scholar] [CrossRef]
- Sivaramakrishnan, M.; Kothandan, R.; Govindarajan, D.K.; Meganathan, Y.; Kandaswamy, K. Active microfluidicsystems for cell sorting and separation-sciencedirect. Curr. Opin. Biomed. Eng. 2020, 13, 60–68. [Google Scholar] [CrossRef]
- Mao, Z.; Yoshida, K.; Kim, J.-W. Active sorting of droplets by using an ECF (Electro-conjugate Fluid) micropump. Sens. Actuators A Phys. 2019, 303, 111702–111713. [Google Scholar] [CrossRef]
- Wei, S.; Earl, S.K.; Lin, J.; Kou, S.S.; Yuan, X.-C. Active sorting of orbital angular momentum states of light with a cascaded tunable resonator. Light. Sci. Appl. 2020, 9, 10–19. [Google Scholar] [CrossRef] [Green Version]
- Gou, Y.; Zhang, S.; Sun, C.; Wang, P.; Ren, D. Sheathless inertial focusing chip combining a spiral channel with periodic ex-pansion structures for efficient and stable particle sorting. Anal. Chem. 2019, 92, 1833–1841. [Google Scholar] [CrossRef]
- Ettehad, H.M.; Wenger, C. Characterization and Separation of Live and Dead Yeast Cells Using CMOS-Based DEP Microfluidics. Micromachines 2021, 12, 270. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.G.; Wu, M.X.; Yang, S.J.; Wu, Y.Q.; Gu, Y.Y.; Chen, C.Y.; Ye, J.; Xie, Z.M.; Tian, Z.H.; Bachman, H.; et al. A disposable acoustofluidic chip for nano/microparticle separation using unidirec-tional acoustic transducers. Lab Chip 2020, 20, 1298–1308. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.S.; Wagner, M.; Stocker, R. Raman-based sorting of microbial cells to link functions to their genes. Microb. Cell 2020, 7, 62–65. [Google Scholar] [CrossRef] [PubMed]
- Xue, S.; Zhang, X.W.; He, F. Acoustic particle migration and focusing in a tilted acoustic field. Phys. Fluids 2021, 33, 122006–122017. [Google Scholar] [CrossRef]
- Mutafopulos, K.; Spink, P.; Lofstrom, C.D.; Lu, P.J.; Lu, H.; Sharpe, J.C.; Franke, T.; Weitz, D.A. Traveling surface acoustic wave (TSAW) microfluidic fluorescence activated cell sorter (μFACS). Lab Chip 2019, 19, 2435–2443. [Google Scholar] [CrossRef]
- Ning, S.; Liu, S.; Xiao, Y.; Zhang, G.; Cui, W.; Reed, M. A microfluidic chip with a serpentine channel enabling high-throughput cell separation using surface acoustic waves. Lab Chip 2021, 21, 4608–4617. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Zhang, H.; Cheng, J.; Cai, W.; Li, X.; Wu, J.; Li, F.C. A numerical study on heat transfer performance in a straight mi-crochannel heat sink with standing surface acoustic waves. Heat Transf. Eng. 2021, 43, 371–387. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, W.; Zhu, F.; Liu, P.; Ba, Y. Numerical study of particle separation with standing surface acoustic waves (SSAW). Powder Technol. 2022, 395, 103–110. [Google Scholar] [CrossRef]
- Lu, H.; Mutafopulos, K.; Heyman, J.A.; Spink, P.; Shen, L.; Wang, C.; Franke, T.; Weitz, D.A. Rapid additive-free bacteria lysis using traveling surface acoustic waves in microfluidic channels. Lab Chip 2019, 19, 4064–4070. [Google Scholar] [CrossRef]
- Mutafopulos, K.; Lu, P.J.; Garry, R.; Spink, P.; Weitz, D.A. Selective cell encapsulation, lysis, pico-injection and size-controlled droplet generation using traveling surface acoustic waves in a microfluidic device. Lab Chip 2020, 20, 3914–3921. [Google Scholar] [CrossRef]
- Liu, G.; Li, Z.; Li, X.; Li, Y.; Tang, H.; Wang, M.; Yang, Z. Design and experiment of a focused acoustic sorting chip based on TSAW separation mechanism. Microsyst. Technol. 2020, 26, 2817–2828. [Google Scholar] [CrossRef]
- Kim, G.-Y.; Han, J.-I.; Park, J.-K. Inertial Microfluidics-Based Cell Sorting. BioChip J. 2018, 12, 257–267. [Google Scholar] [CrossRef]
- Fakhfouri, A.; Devendran, C.; Ahmed, A.; Soria, J.; Neild, A. The size dependant behaviour of particles driven by a travel-ling surface acoustic wave (tsaw). Lab Chip 2018, 18, 3926–3938. [Google Scholar] [CrossRef] [PubMed]
- Skowronek, V.; Rambach, R.W.; Schmid, L.; Haase, K.; Franke, T. Particle deflection in a poly(dimethylsiloxane) micro-channel using a propagating surface acoustic wave: Size and frequency dependence. Anal. Chem. 2013, 85, 9955–9959. [Google Scholar] [CrossRef] [PubMed]
- Destgeer, G.; Ha, B.H.; Jung, J.H.; Sung, H.J. Submicron separation of microspheres via travelling surface acoustic waves. Lab Chip 2014, 14, 4665–4672. [Google Scholar] [CrossRef] [PubMed]
- Xiang, N.; Wang, J.; Li, Q.; Han, Y.; Huang, D.; Ni, Z. Precise size-based cell separation via the coupling of inertial mi-crofluidics and deterministic lateral displacement. Anal. Chem. 2019, 91, 10328–10334. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Outlet Type | Sample Number | 20 μm Particle Concentration | 5 μm/10 μm Particle Concentration | Total Particle Concentration | 20 μm Particle Content Percentage |
|---|---|---|---|---|---|
| The target outlet | Sample 1 | 1.32 × 105/mL | 0.00 × 100 mL | 1.32 × 105/mL | 100% |
| Sample 2 | 3.47 × 105/mL | 1.75 × 104/mL | 3.65 × 105/mL | 95% | |
| Sample 3 | 1.26 × 105/mL | 0.00 × 100 mL | 1.26 × 105/mL | 100% | |
| Sample 4 | 1.72 × 105/mL | 1.50 × 104/mL | 1.87 × 105/mL | 92% | |
| Sample 5 | 3.33 × 105/mL | 2.51 × 104/mL | 3.58 × 105/mL | 93% | |
| The non-target outlet | Sample 1 | 0.00 × 100 mL | 3.07 × 105/mL | 3.07 × 105/mL | 0% |
| Sample 2 | 0.00 × 100 mL | 2.48 × 105/mL | 2.48 × 105/mL | 0% | |
| Sample 3 | 0.00 × 100 mL | 3.42 × 105/mL | 3.42 × 105/mL | 0% | |
| Sample 4 | 0.00 × 100 mL | 1.78 × 105/mL | 1.78 × 105/mL | 0% | |
| Sample 5 | 0.00 × 100 mL | 2.55 × 105/mL | 2.55 × 105/mL | 0% |
| Chip Type | Flow Velocity | Separation Purity | Separation Efficiency | Chip Size | Require Sheath Flow |
|---|---|---|---|---|---|
| [26] | 400 µL/min | 93.59% | 99.9% | 6.5 cm × 2 cm | No |
| [15] | 25 µL/min | 90% | not mentioned | not mentioned | Yes |
| [16] | 67.5 µL/min | 92.7% | not mentioned | 2 cm × 1 cm | Yes |
| Our work | 20 µL/min | 92% | 100% | 2 cm × 2 cm | No |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, M.; Liu, Y.; Duan, J.; Zang, W.; Wang, Y.; Qu, Z.; Zhang, B. A Novel Perturbed Spiral Sheathless Chip for Particle Separation Based on Traveling Surface Acoustic Waves (TSAW). Biosensors 2022, 12, 325. https://doi.org/10.3390/bios12050325
Ji M, Liu Y, Duan J, Zang W, Wang Y, Qu Z, Zhang B. A Novel Perturbed Spiral Sheathless Chip for Particle Separation Based on Traveling Surface Acoustic Waves (TSAW). Biosensors. 2022; 12(5):325. https://doi.org/10.3390/bios12050325
Chicago/Turabian StyleJi, Miaomiao, Yukai Liu, Junping Duan, Wenxuan Zang, Yongsheng Wang, Zeng Qu, and Binzhen Zhang. 2022. "A Novel Perturbed Spiral Sheathless Chip for Particle Separation Based on Traveling Surface Acoustic Waves (TSAW)" Biosensors 12, no. 5: 325. https://doi.org/10.3390/bios12050325
APA StyleJi, M., Liu, Y., Duan, J., Zang, W., Wang, Y., Qu, Z., & Zhang, B. (2022). A Novel Perturbed Spiral Sheathless Chip for Particle Separation Based on Traveling Surface Acoustic Waves (TSAW). Biosensors, 12(5), 325. https://doi.org/10.3390/bios12050325