
An Integrated Nanocomposite Proximity Sensor: Machine Learning-Based Optimization, Simulation, and Experiment


Abstract
:
1. Introduction
- To propose an integrated proximity sensing system that is capable of detecting objects in a wide range by means of active materials.
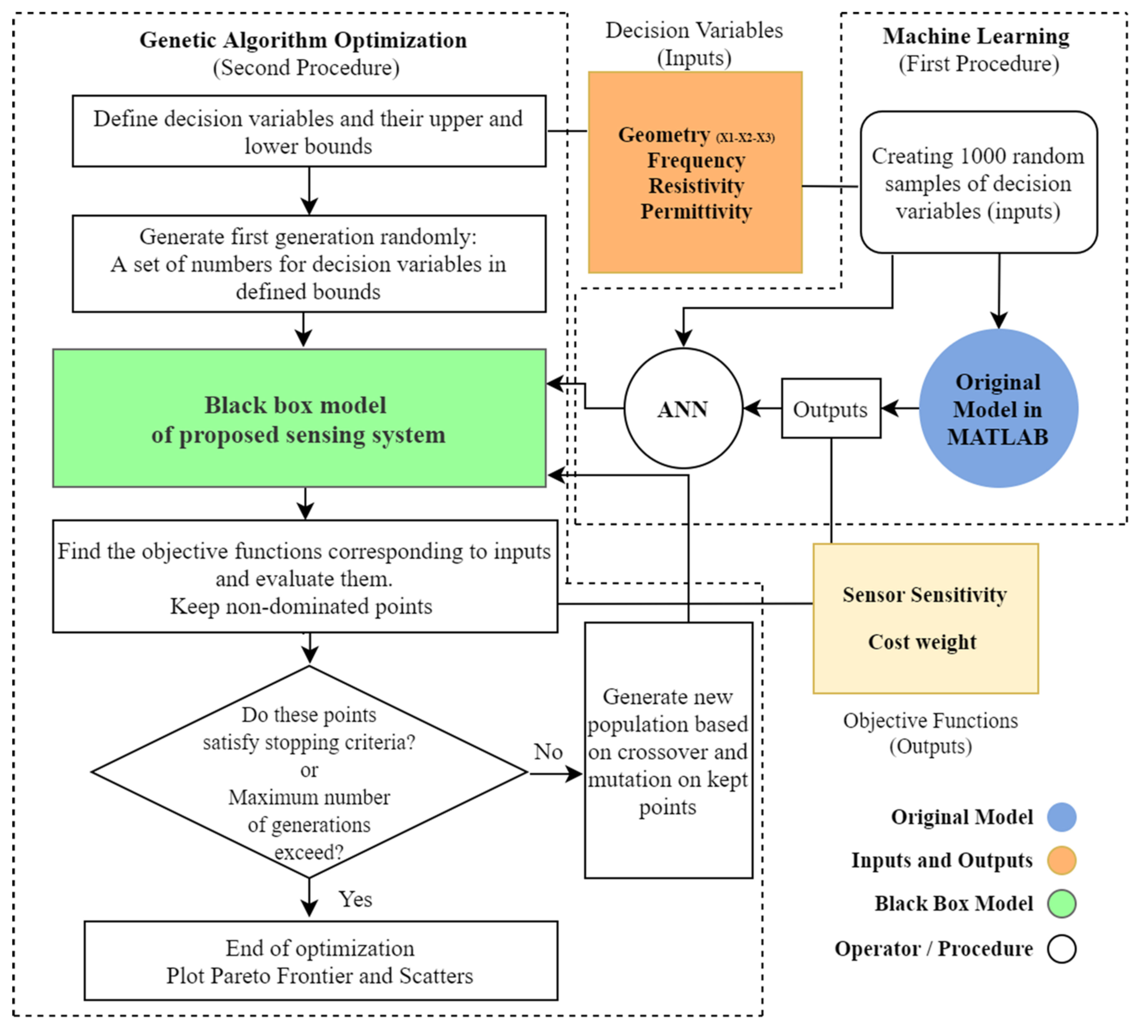
- To train an ANN black-box model that substitutes the original analytical model and thus makes the GA optimization feasible.
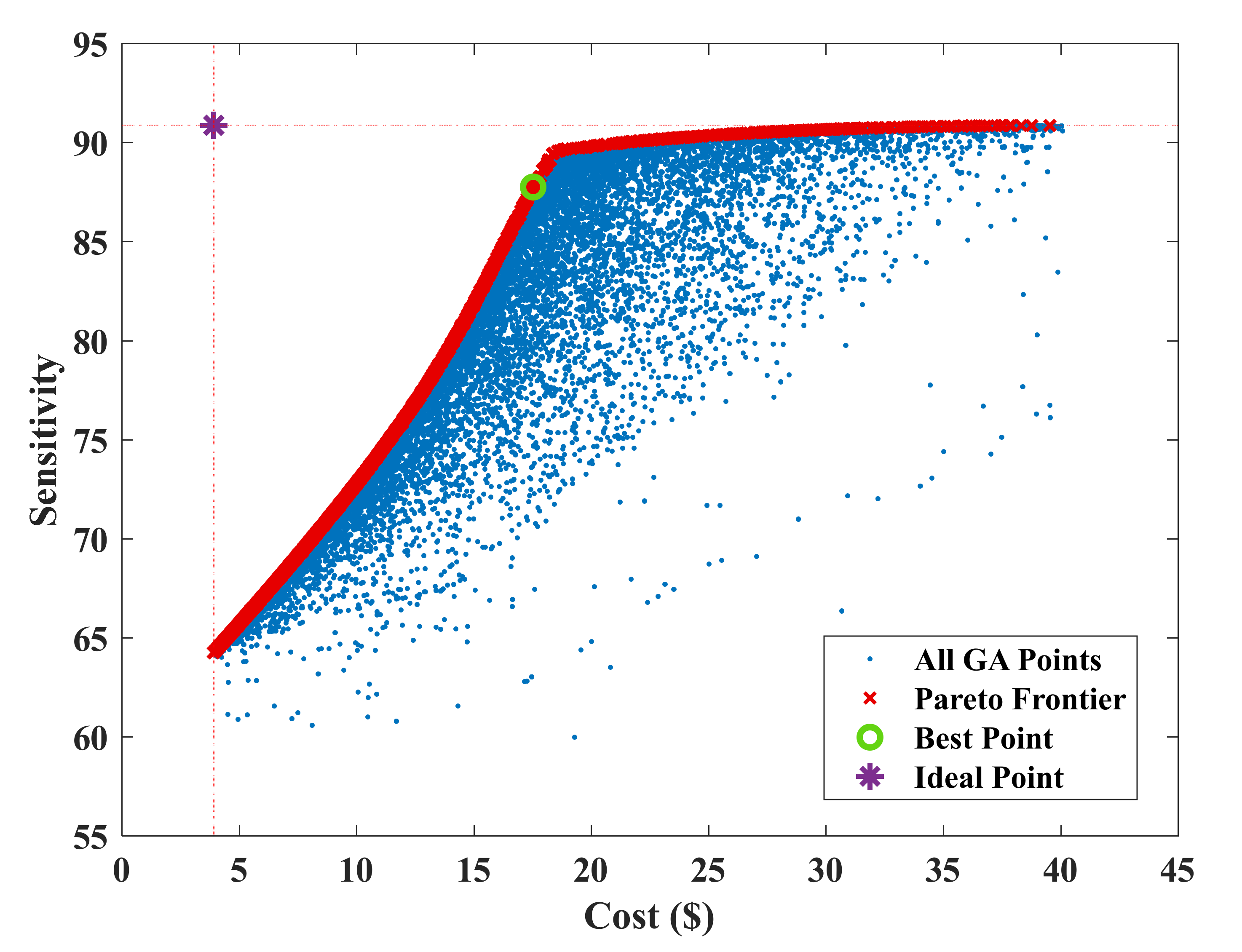
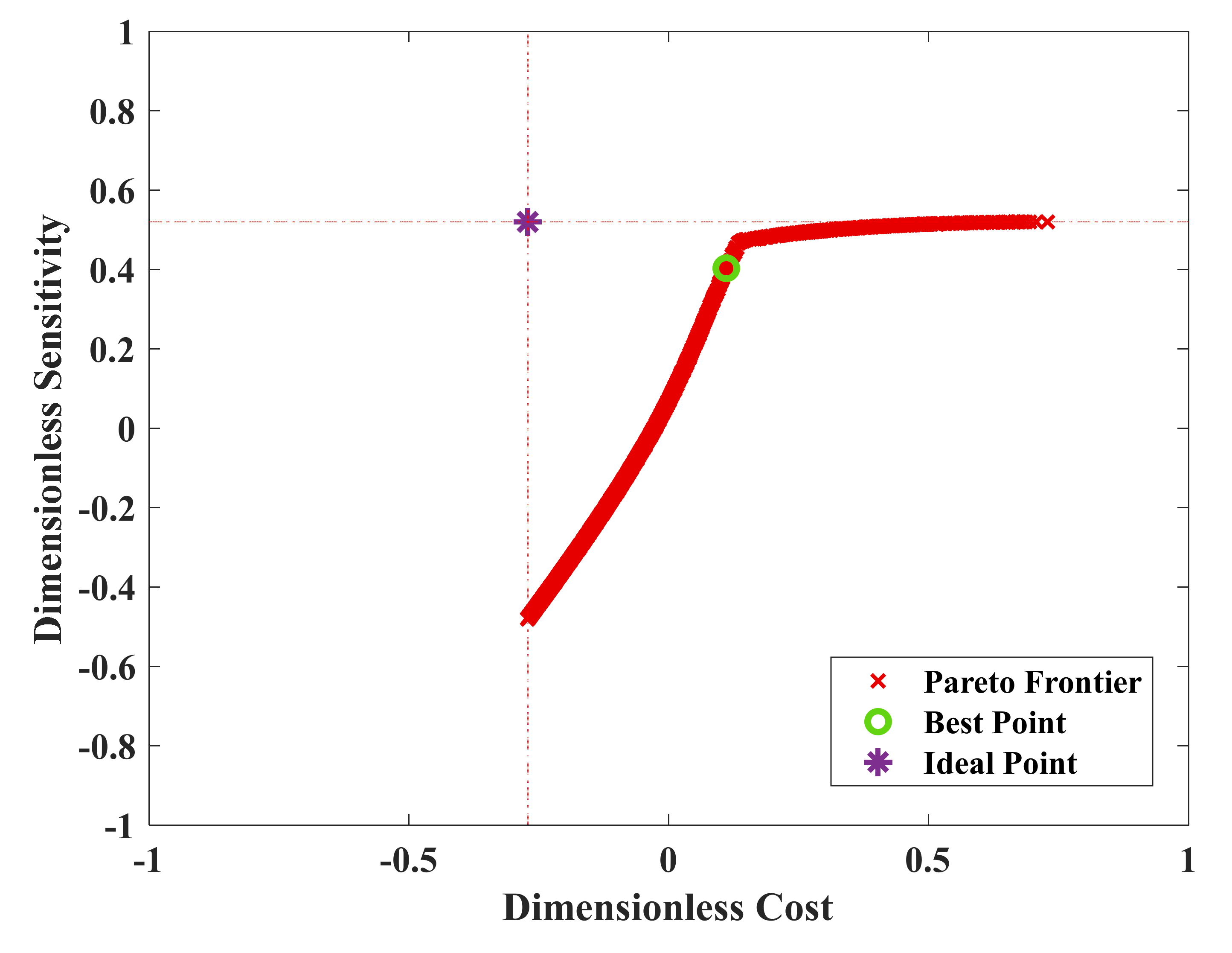
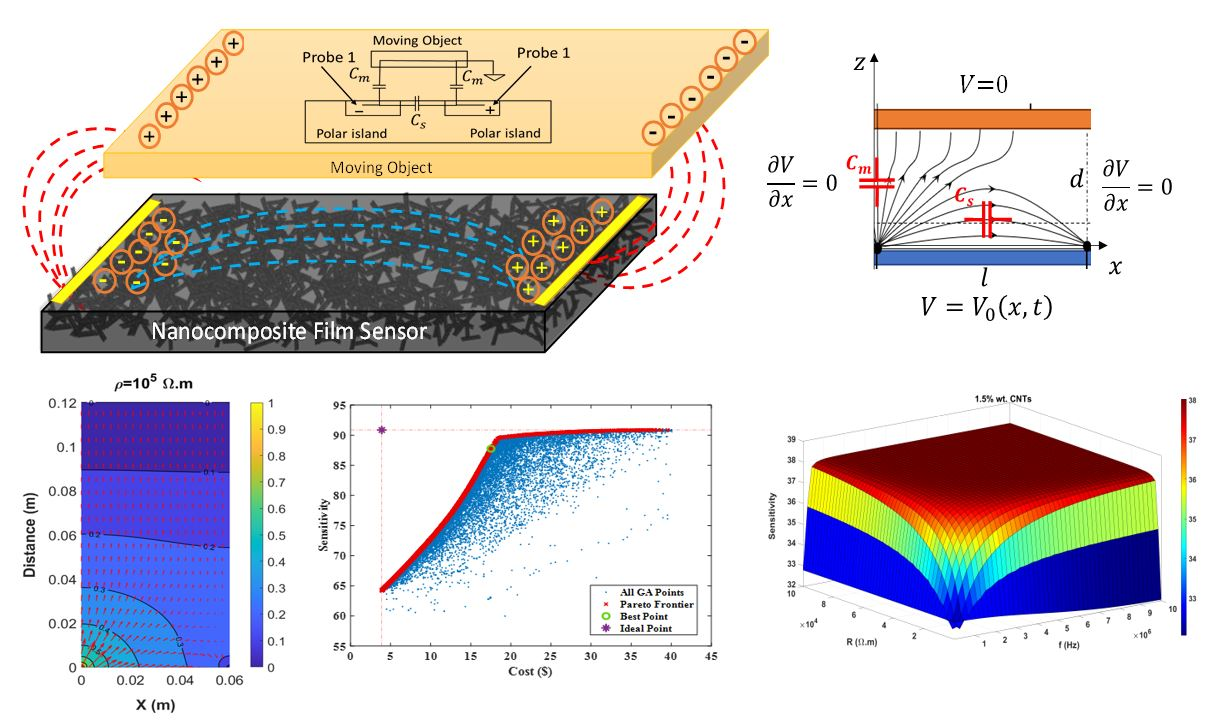
- To implement a dual-objective optimization of sensitivity and cost and later present a two-dimensional Pareto Frontier of the optimum solutions.
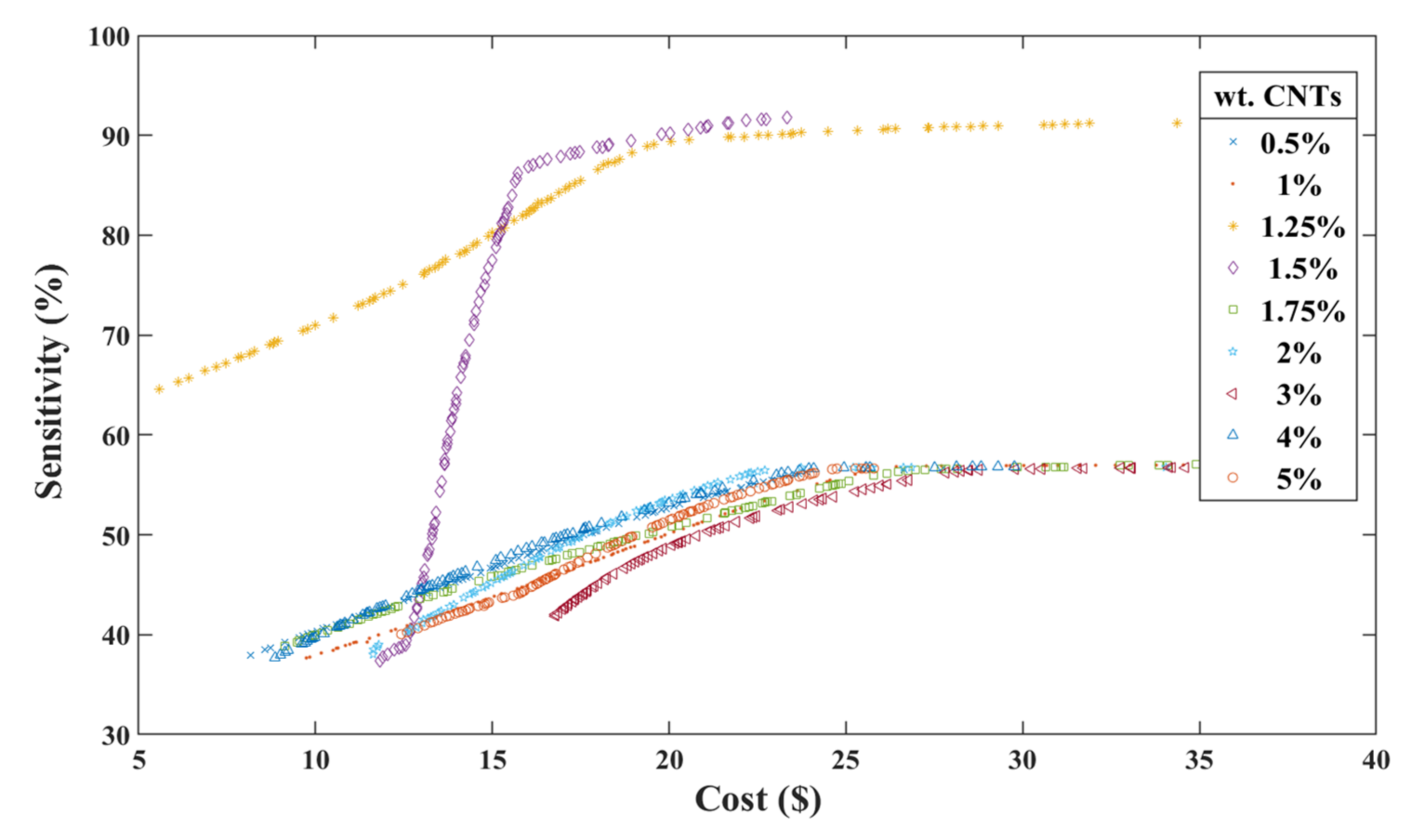
- To compare the best solutions for different CNT percentages and illustrate the effect of CNT on the optimum sensitivity and cost.
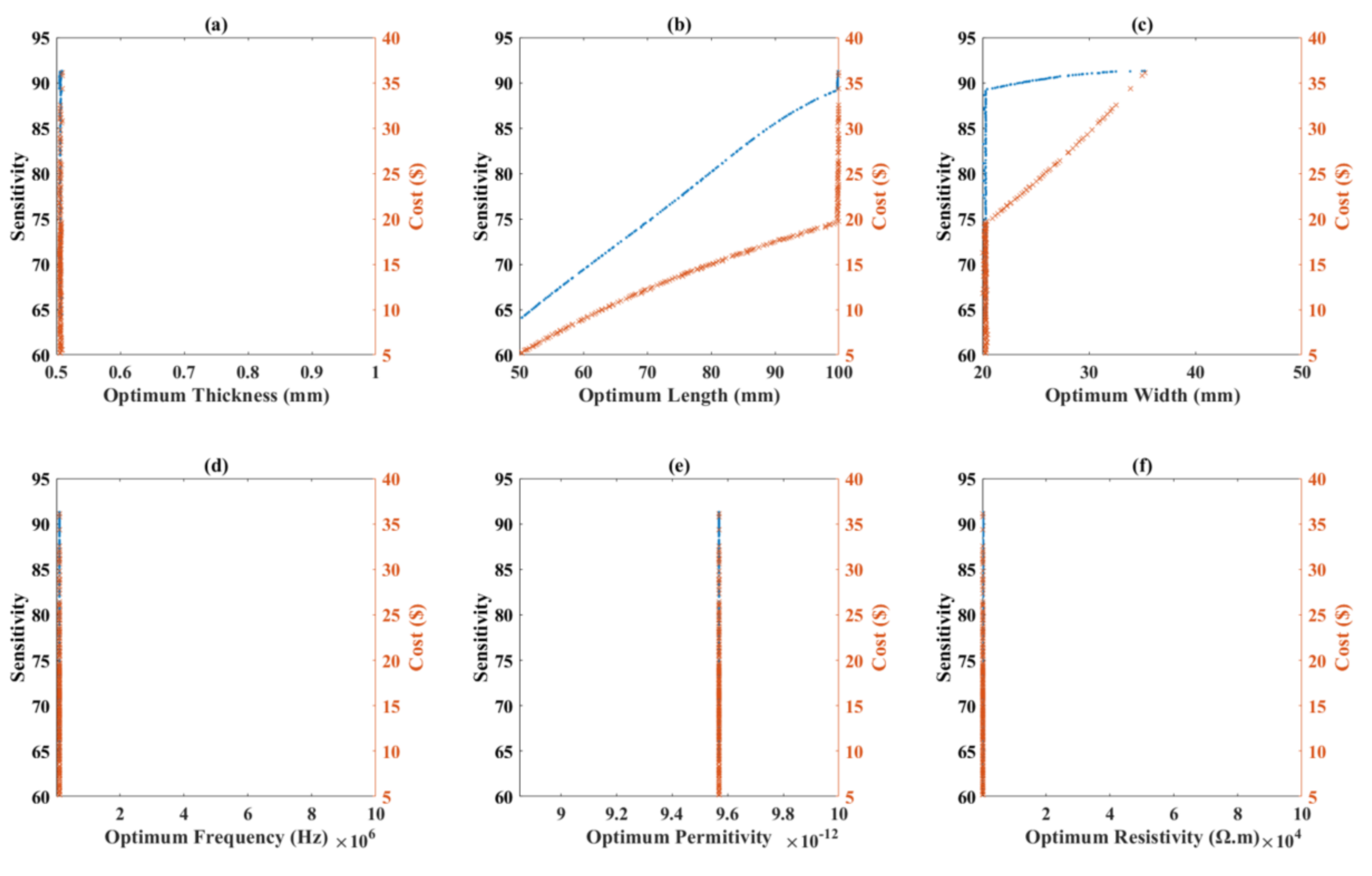
- To find the effect of different decision variables on each other and on the objective functions using two-by-two scatter distributions.
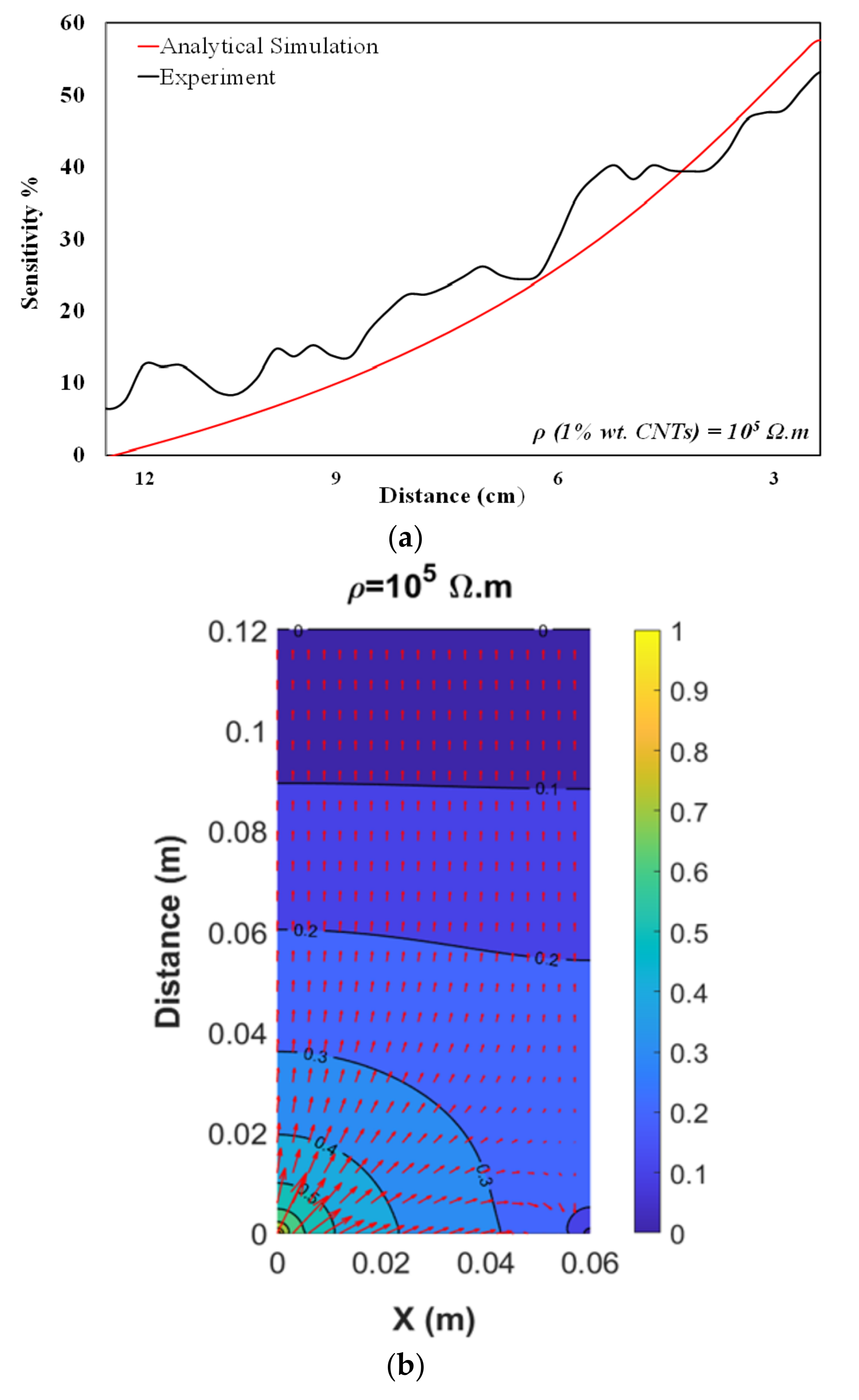
- To simulate the optimum film sensor using the closed-form analytical model and validate the GA optimization process.
2. Model and Experiment Validation
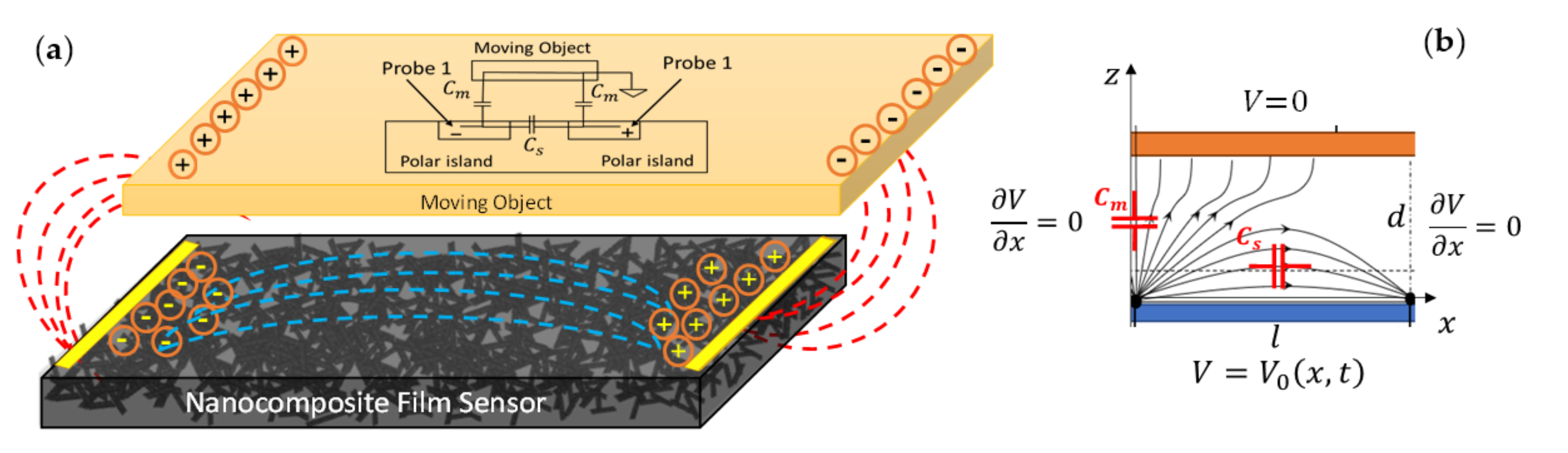
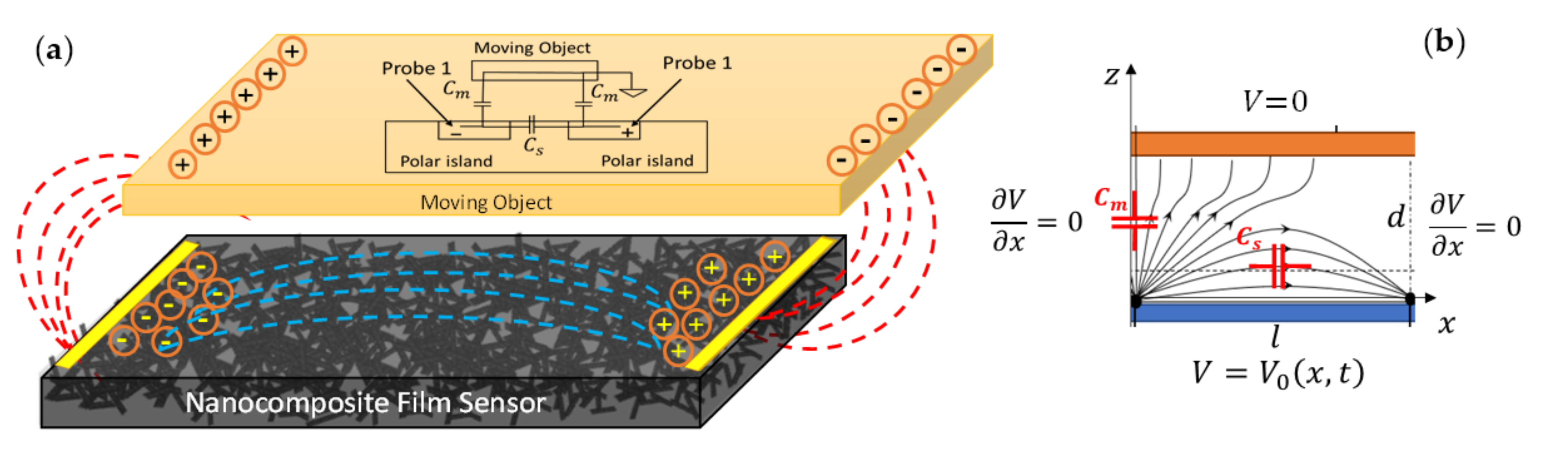
2.1. Background
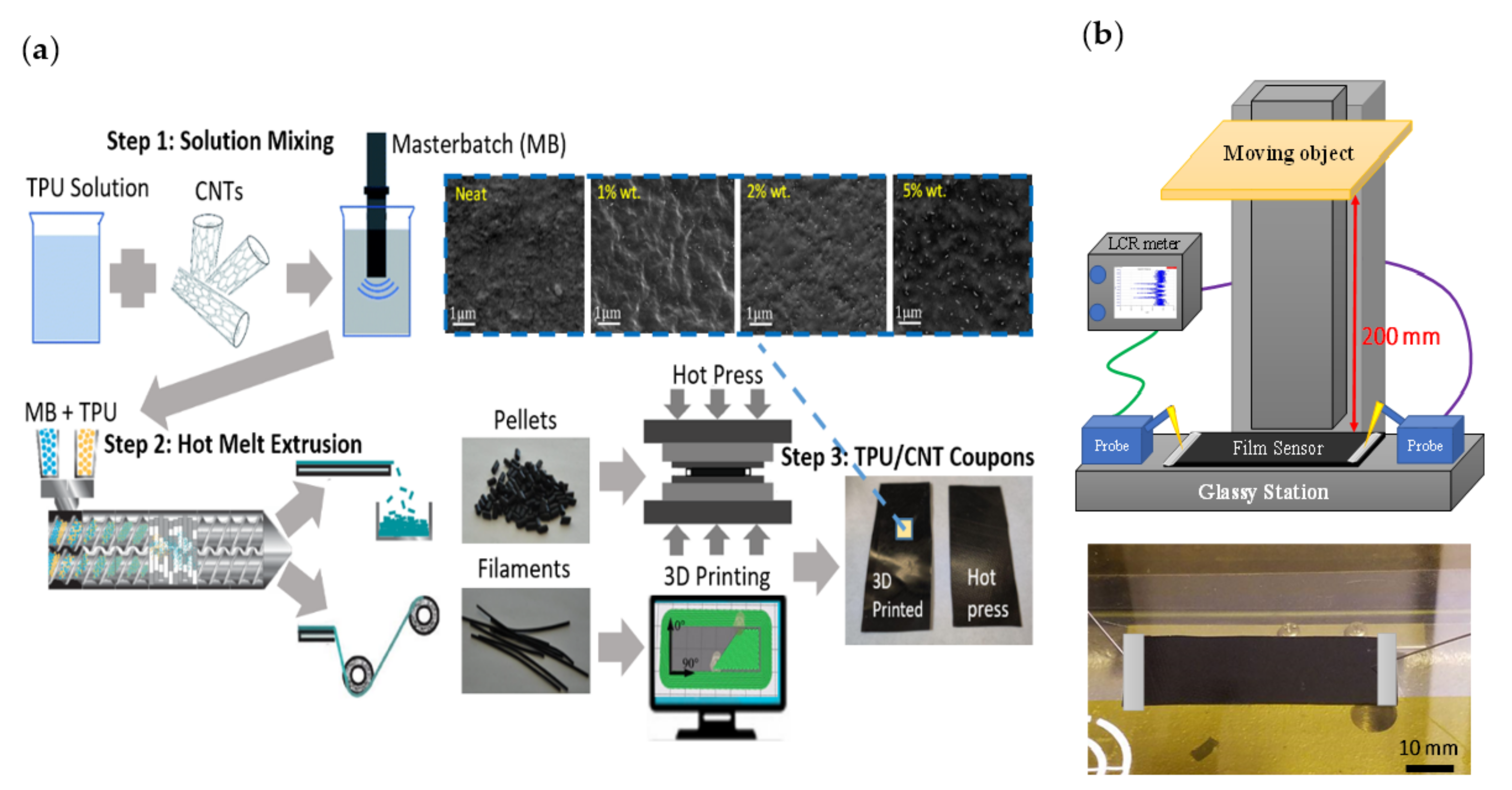
2.2. Experimental Work
2.2.1. Material Preparation
2.2.2. Sensor Read-Out and Characterization
3. Methodology
3.1. Governing Equations and Numerical Simulation
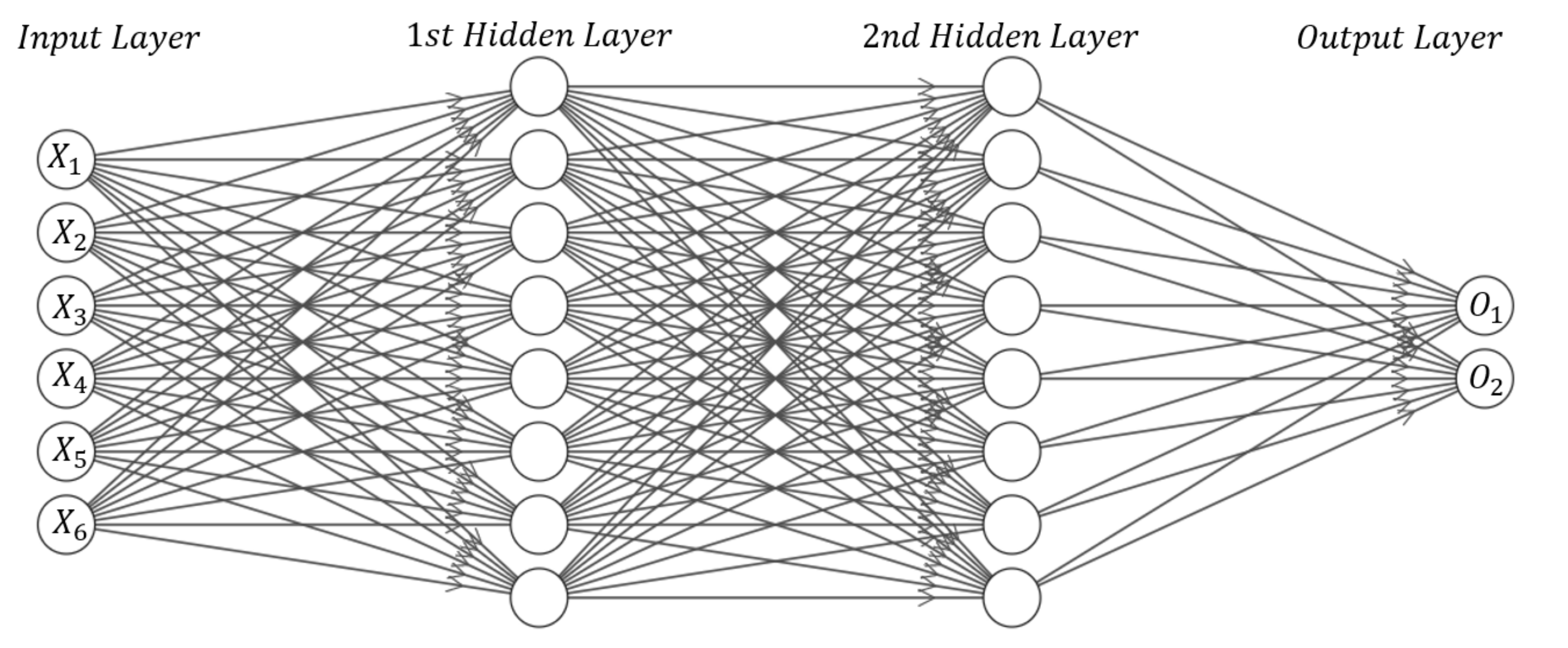
3.2. Artificial Neural Network (ANN)
3.3. Genetic Algorithm Optimization
4. Results and Discussion
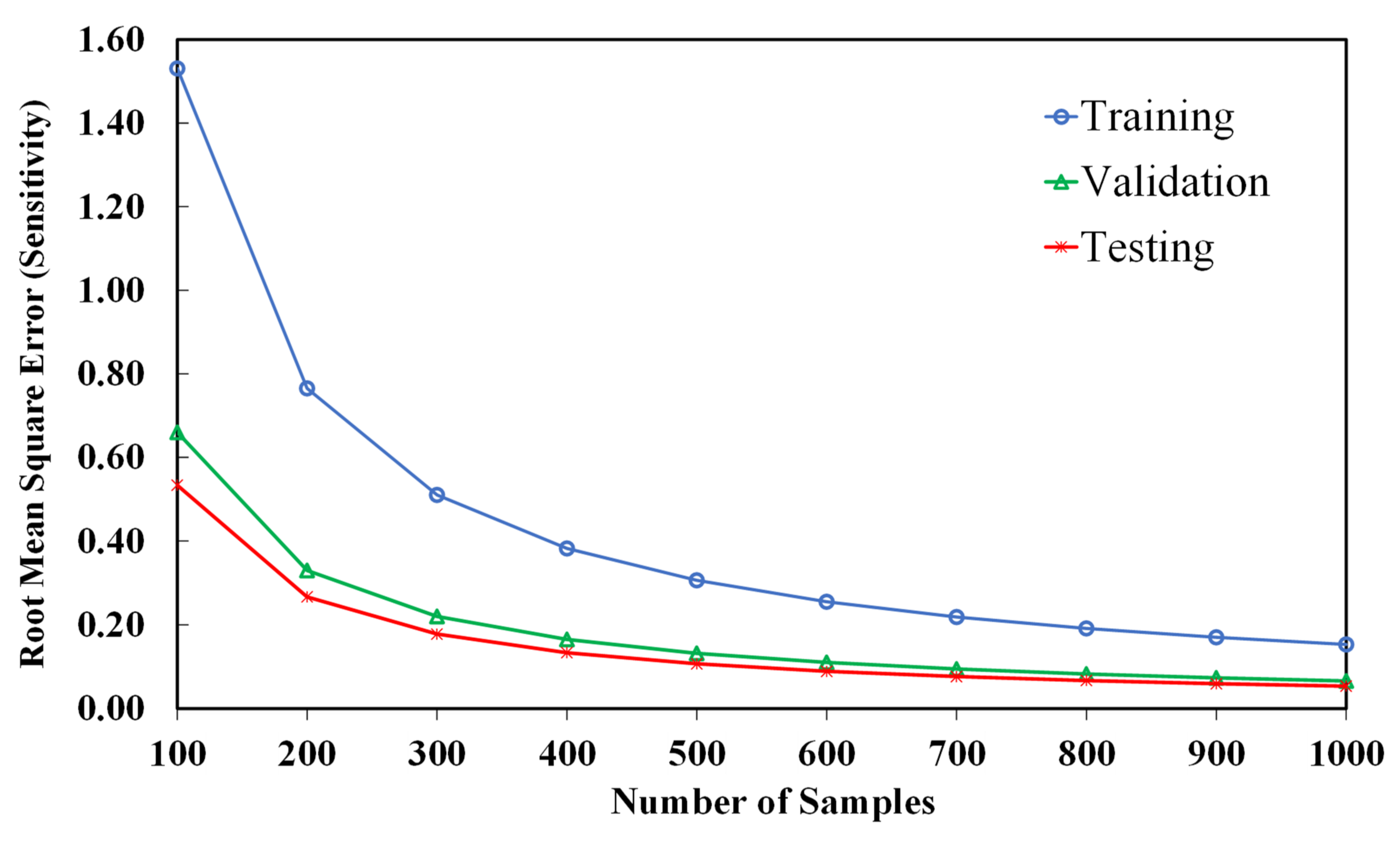
4.1. ANN Results
4.2. Optimization Results for 1.25% CNT
4.3. Optimization Results for all CNTs
4.4. Scatters of Distribution for 1.25% CNT
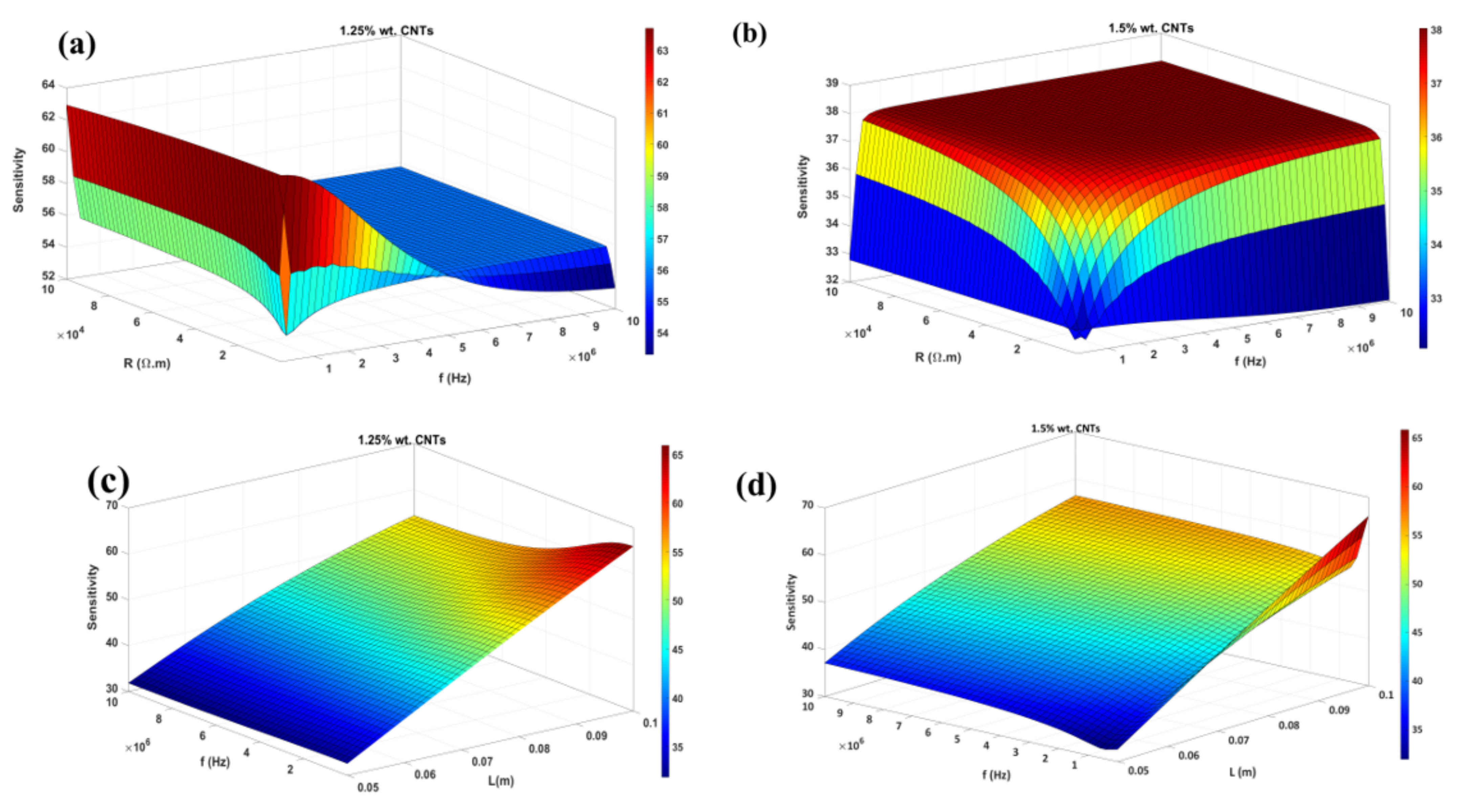
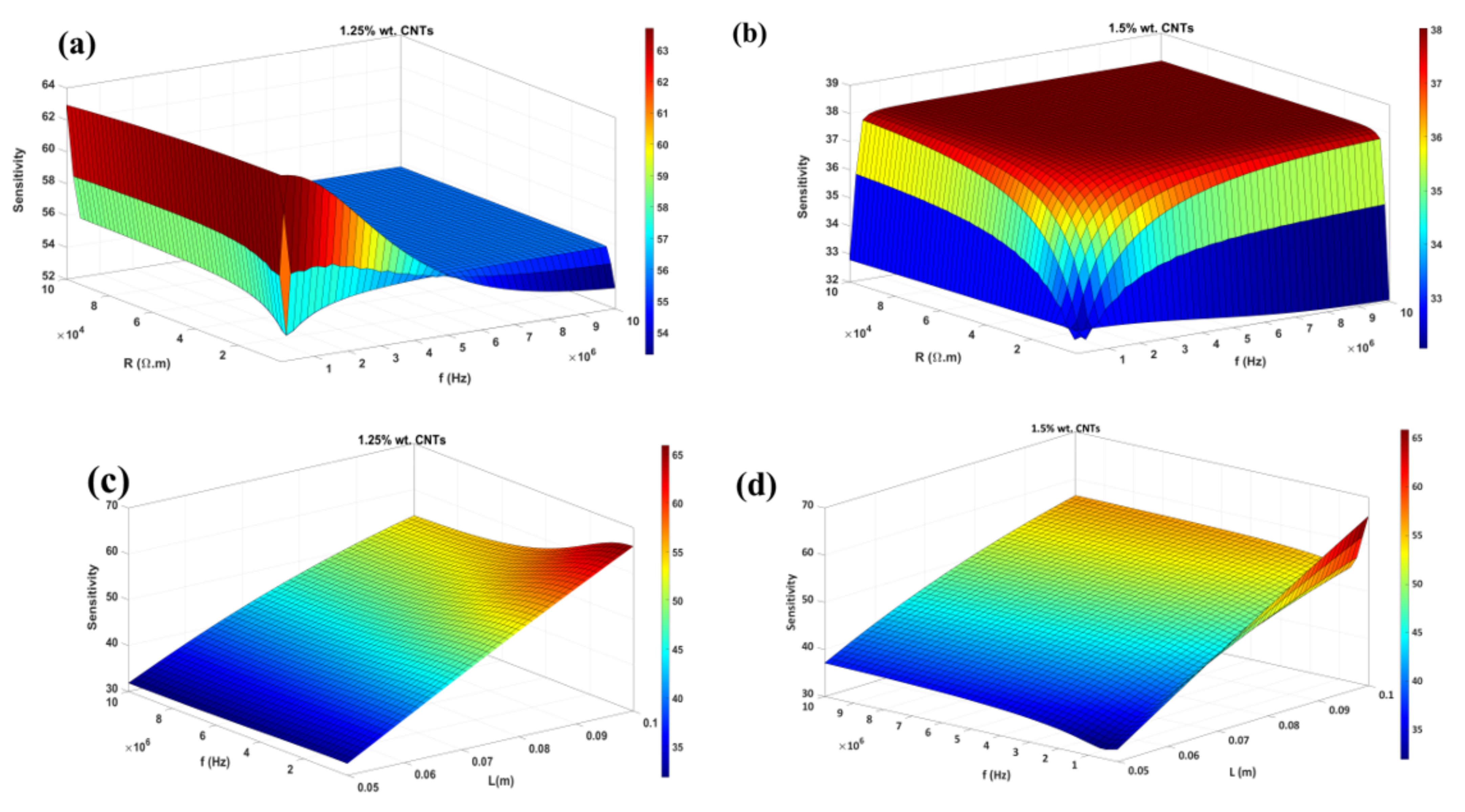
4.5. Parametric Studies of Different Parameters on Sensitivity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Maghsoudi-Ganjeh, M.; Lin, L.; Wang, X.; Zeng, X. Bioinspired design of hybrid composite materials. Int. J. Smart Nano Mater. 2019, 10, 90–105. [Google Scholar] [CrossRef]
- Gao, W.; Emaminejad, S.; Nyein, H.Y.Y.; Challa, S.; Chen, K.; Peck, A.; Fahad, H.M.; Ota, H.; Shiraki, H.; Kiriya, D. Fully integrated wearable sensor arrays for multiplexed in situ perspiration analysis. Nature 2016, 529, 509. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sarwar, M.S.; Dobashi, Y.; Preston, C.; Wyss, J.K.M.; Mirabbasi, S.; Madden, J.D.W. Bend, stretch, and touch: Locating a finger on an actively deformed transparent sensor array. Sci. Adv. 2017, 3, e1602200. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hammock, M.L.; Chortos, A.; Tee, B.C.K.; Tok, J.B.H.; Bao, Z. 25th anniversary article: The evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [CrossRef] [PubMed]
- Park, J.; Lee, Y.; Hong, J.; Lee, Y.; Ha, M.; Jung, Y.; Lim, H.; Kim, S.Y.; Ko, H. Tactile-direction-sensitive and stretchable electronic skins based on human-skin-inspired interlocked microstructures. ACS Nano 2014, 8, 12020–12029. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.-Y.; Gao, Q.; Zhan, J.-F.; Xie, C.-Q.; Fu, J.-Z.; He, Y. Three-dimensional printed wearable sensors with liquid metals for detecting the pose of snakelike soft robots. ACS Appl. Mater. Interfaces 2018, 10, 23208–23217. [Google Scholar] [CrossRef] [PubMed]
- Joshi, S.; Boyd, S. Sensor selection via convex optimization. IEEE Trans. Signal Processing 2008, 57, 451–462. [Google Scholar] [CrossRef] [Green Version]
- Kalantari, M.; Shayman, M. Design optimization of multi-sink sensor networks by analogy to electrostatic theory. In Proceedings of the IEEE Wireless Communications and Networking Conference, 2006. WCNC 2006, Las Vegas, NV, USA, 3–6 April 2006; pp. 431–438. [Google Scholar]
- Fraleigh, L.; Guay, M.; Forbes, J. Sensor selection for model-based real-time optimization: Relating design of experiments and design cost. J. Process Control 2003, 13, 667–678. [Google Scholar] [CrossRef]
- Adly, M.A.; Arafa, M.H.; Hegazi, H.A. Modeling and optimization of an inertial triboelectric motion sensor. Nano Energy 2021, 85, 105952. [Google Scholar] [CrossRef]
- Fu, X.; Pace, P.; Aloi, G.; Yang, L.; Fortino, G. Topology optimization against cascading failures on wireless sensor networks using a memetic algorithm. Comput. Netw. 2020, 177, 107327. [Google Scholar] [CrossRef]
- Wang, S.; Bi, M.; Cao, Z.; Ye, X. Linear freestanding electret generator for harvesting swinging motion energy: Optimization and experiment. Nano Energy 2019, 65, 104013. [Google Scholar] [CrossRef]
- Kim, C.; Choi, M.; Park, T.; Kim, M.; Seo, K.; Kim, H. Optimization of yield monitoring in harvest using a capacitive proximity sensor. Eng. Agric. Environ. Food 2016, 9, 151–157. [Google Scholar] [CrossRef]
- Ferentinos, K.P.; Tsiligiridis, T.A. Adaptive design optimization of wireless sensor networks using genetic algorithms. Comput. Netw. 2007, 51, 1031–1051. [Google Scholar] [CrossRef]
- Askari, H.; Asadi, E.; Saadatnia, Z.; Khajepour, A.; Khamesee, M.B.; Zu, J. A hybridized electromagnetic-triboelectric self-powered sensor for traffic monitoring: Concept, modelling, and optimization. Nano Energy 2017, 32, 105–116. [Google Scholar] [CrossRef]
- Sun, X.; Sun, J.; Li, T.; Zheng, S.; Wang, C.; Tan, W.; Zhang, J.; Liu, C.; Ma, T.; Qi, Z.; et al. Flexible Tactile Electronic Skin Sensor with 3D Force Detection Based on Porous CNTs/PDMS Nanocomposites. Nano-Micro Lett. 2019, 11, 57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, M.; Jung, J.; Jung, S.; Moon, Y.H.; Kim, D.-H.; Kim, J.H. Piezoresistive Behaviour of Additively Manufactured Multi-Walled Carbon Nanotube/Thermoplastic Polyurethane Nanocomposites. Materials 2019, 12, 2613. [Google Scholar] [CrossRef] [Green Version]
- Kulkarni, M.R.; John, R.A.; Rajput, M.; Tiwari, N.; Yantara, N.; Nguyen, A.C.; Mathews, N. Transparent flexible multifunctional nanostructured architectures for non-optical readout, proximity, and pressure sensing. ACS Appl. Mater. Interfaces 2017, 9, 15015–15021. [Google Scholar] [CrossRef]
- Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef] [Green Version]
- Hu, N.; Fukunaga, H.; Atobe, S.; Liu, Y.; Li, J. Piezoresistive strain sensors made from carbon nanotubes based polymer nanocomposites. Sensors 2011, 11, 10691–10723. [Google Scholar] [CrossRef] [Green Version]
- Abdi, Y.; Ebrahimi, A.; Mohajerzadeh, S.; Fathipour, M. High sensitivity interdigited capacitive sensors using branched treelike carbon nanotubes on silicon membranes. Appl. Phys. Lett. 2009, 94, 173507. [Google Scholar] [CrossRef]
- Tsuji, S.; Kohama, T. Proximity Skin Sensor using Time-of-flight Sensor for Human Collaborative Robot. IEEE Sens. J. 2019, 19, 5859–5864. [Google Scholar] [CrossRef]
- Ojuroye, O.O.; Torah, R.N.; Komolafe, A.O.; Beeby, S.P. Embedded capacitive proximity and touch sensing flexible circuit system for electronic textile and wearable systems. IEEE Sens. J. 2019, 19, 6975–6985. [Google Scholar] [CrossRef]
- Moheimani, R.; Agarwal, M.; Dalir, H. Flexible Nano-reinforced Polymeric Proximity Sensors. In Proceedings of the AIAA Scitech 2021 Forum, Virtual Event, 11–15 & 19–21 January 2021; p. 0274. [Google Scholar]
- Cho, I.-J.; Lee, H.-K.; Chang, S.-I.; Yoon, E. Compliant ultrasound proximity sensor for the safe operation of human friendly robots integrated with tactile sensing capability. J. Electr. Eng. Technol. 2017, 12, 310–316. [Google Scholar] [CrossRef]
- Kohama, T.; Tsuji, S. Tactile and proximity measurement by 3D tactile sensor using self-capacitance measurement. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Braun, A.; Wichert, R.; Kuijper, A.; Fellner, D.W. Capacitive proximity sensing in smart environments. J. Ambient Intell. Smart Environ. 2015, 7, 483–510. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Xiang, Z.; Zhu, S.; Hu, Q.; Cao, Y.; Zhong, J.; Zhong, Q.; Wang, B.; Fang, Y.; Hu, B. Dual functional transparent film for proximity and pressure sensing. Nano Res. 2014, 7, 1488–1496. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chang, S.-I.; Yoon, E. Dual-mode capacitive proximity sensor for robot application: Implementation of tactile and proximity sensing capability on a single polymer platform using shared electrodes. IEEE Sens. J. 2009, 9, 1748–1755. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Todoroki, A. Wireless flexible capacitive sensor based on ultra-flexible epoxy resin for strain measurement of automobile tires. Sens. Actuators A 2007, 140, 32–42. [Google Scholar] [CrossRef]
- Langfelder, G.; Longoni, A.F.; Tocchio, A.; Lasalandra, E. MEMS motion sensors based on the variations of the fringe capacitances. IEEE Sens. J. 2010, 11, 1069–1077. [Google Scholar] [CrossRef]
- Andalib, V.; Sarkar, J. A System with Two Spare Units, Two Repair Facilities, and Two Types of Repairers. Mathematics 2022, 10, 852. [Google Scholar] [CrossRef]
- Masazade, E.; Rajagopalan, R.; Varshney, P.K.; Sendur, G.K.; Keskinoz, M. Evaluation of local decision thresholds for distributed detection in wireless sensor networks using multiobjective optimization. In Proceedings of the 2008 42nd Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 26–29 October 2008; pp. 1958–1962. [Google Scholar]
- Iqbal, M.; Naeem, M.; Anpalagan, A.; Ahmed, A.; Azam, M. Wireless sensor network optimization: Multi-objective paradigm. Sensors 2015, 15, 17572–17620. [Google Scholar] [CrossRef]
- Guo, H.; Pu, X.; Chen, J.; Meng, Y.; Yeh, M.-H.; Liu, G.; Tang, Q.; Chen, B.; Liu, D.; Qi, S.; et al. A highly sensitive, self-powered triboelectric auditory sensor for social robotics and hearing aids. Sci. Rob. 2018, 3, eaat2516. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kang, M.; Kim, J.; Jang, B.; Chae, Y.; Kim, J.-H.; Ahn, J.-H. Graphene-based three-dimensional capacitive touch sensor for wearable electronics. ACS Nano 2017, 11, 7950–7957. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.-F.; Su, W.-S.; Fang, W. Development of patterned carbon nanotubes on a 3D polymer substrate for the flexible tactile sensor application. J. Micromech. Microeng. 2011, 21, 115012. [Google Scholar] [CrossRef]
- Hu, N.; Karube, Y.; Arai, M.; Watanabe, T.; Yan, C.; Li, Y.; Liu, Y.; Fukunaga, H. Investigation on sensitivity of a polymer/carbon nanotube composite strain sensor. Carbon 2010, 48, 680–687. [Google Scholar] [CrossRef]
- Yeow, J.; She, J. Carbon nanotube-enhanced capillary condensation for a capacitive humidity sensor. Nanotechnology 2006, 17, 5441. [Google Scholar] [CrossRef]
- Moheimani, R.; Aliahmad, N.; Aliheidari, N.; Agarwal, M.; Dalir, H. Thermoplastic polyurethane flexible capacitive proximity sensor reinforced by CNTs for applications in the creative industries. Sci. Rep. 2021, 11, 1104. [Google Scholar] [CrossRef]
- Moheimani, R.; Pasharavesh, A.; Agarwal, M.; Dalir, H. Mathematical Model and Experimental Design of Nanocomposite Proximity Sensors. IEEE Access 2020, 8, 153087–153097. [Google Scholar] [CrossRef]
- Ehsani, A.; Dalir, H. Multi-objective optimization of composite angle grid plates for maximum buckling load and minimum weight using genetic algorithms and neural networks. Compos. Struct. 2019, 229, 111450. [Google Scholar] [CrossRef]
- Naserabad, S.N.; Rafee, R.; Saedodin, S.; Ahmadi, P. A novel approach of tri-objective optimization for a building energy system with thermal energy storage to determine the optimum size of energy suppliers. Sustain. Energy Technol. Assess. 2021, 47, 101379. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property (Symbol) | Value |
|---|---|
| TPU Density | 1.12 (g/cm3) |
| MWCNT Density | 1.75 (g/cm3) |
| Cost MWCNTs | 20 $/grm |
| Dielectric Thickness | 0.5 (mm) |
| Vacuum Permittivity | 8.8542 (pF/m) |
| Film Sensor Resistivity | 1–105 (Ωm) |
| Frequency | 100–1000 (kHz) |
| AC Voltage | 30 mV |
| DC Voltage | 5 V |
| Object’s speed | 6.6 mm/s |
| Variable | Design Parameters | (Symbol) | Lower Bound Min. | Upper Bound Max. |
|---|---|---|---|---|
| X1 | Device Thickness | h (mm) | 0.5 | 1 |
| X2 | Device Length | L (mm) | 50 | 100 |
| X3 | Device Width | b (mm) | 20 | 50 |
| X4 | Frequency | f (Hz) | 103 | 107 |
| X5 | Dielectric Relative Permittivity | εr | 1 | 8 |
| X6 | Impedance (resistivity) | Ω (Ohm·m) | 102 | 105 |
| 1st Hidden Layer | 2nd Hidden Layer | Output Layer | Training Samples | Testing Samples | Validating Samples | |||
|---|---|---|---|---|---|---|---|---|
| neurons | Transfer fn. | neurons | Transfer fn. | neurons | Transfer fn. | 80% | 10% | 10% |
| 8 | Tangent sigmoid | 8 | Tangent sigmoid | 2 | Linear | |||
| Inputs | Outputs | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| GA Runtime (s) | CNTs %wt. | X1 (10−4) | X2 | X3 | X4 (106) | X5 (10−12) | X6 (104) | Predicted by AAN | Calculated by Simulation | ||
| Sensitivity % | Cost USD | Sensitivity % | Cost USD | ||||||||
| 221 | 0.5 | 5.012 | 0.0926 | 0.0201 | 1.2953 | 9.991 | 1.4463 | 54.05 | 21.014 | 54.53 | 20.94 |
| 294 | 1 | 5.0955 | 0.0857 | 0.0201 | 8.82 | 9.8964 | 6.0655 | 52.65 | 22.026 | 52.64 | 22.75 |
| 241 | 1.25 | 5.0658 | 0.0935 | 0.0202 | 0.096978 | 9.567 | 0.03092 | 87.02 | 18.14 | 84.70 | 21.49 |
| 326 | 1.5 | 5.2305 | 0.0503 | 0.0201 | 0.091565 | 9.2711 | 0.2268 | 85.35 | 15.64 | 83.12 | 16.89 |
| 271 | 1.75 | 5.0181 | 0.09199 | 0.02005 | 1.34906 | 9.99127 | 1.73746 | 54.00 | 20.96 | 54.39 | 20.85 |
| 327 | 2 | 5.0218 | 0.0944 | 0.02101 | 5.8707 | 9.1241 | 5.8509 | 55.24 | 21.37 | 55.18 | 21.51 |
| 324 | 3 | 5.2225 | 0.0956 | 0.0212 | 4.8568 | 9.1334 | 6.3342 | 56.35 | 23.06 | 56.45 | 22.71 |
| 282 | 4 | 5.2519 | 0.0977 | 0.0200 | 6.9567 | 9.8529 | 4.1619 | 56.07 | 23.07 | 56.07 | 23.38 |
| 256 | 5 | 5.1270 | 0.0782 | 0.02004 | 4.04022 | 9.7919 | 5.3694 | 50.12 | 19.108 | 50.14 | 18.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moheimani, R.; Gonzalez, M.; Dalir, H. An Integrated Nanocomposite Proximity Sensor: Machine Learning-Based Optimization, Simulation, and Experiment. Nanomaterials 2022, 12, 1269. https://doi.org/10.3390/nano12081269
Moheimani R, Gonzalez M, Dalir H. An Integrated Nanocomposite Proximity Sensor: Machine Learning-Based Optimization, Simulation, and Experiment. Nanomaterials. 2022; 12(8):1269. https://doi.org/10.3390/nano12081269
Chicago/Turabian StyleMoheimani, Reza, Marcial Gonzalez, and Hamid Dalir. 2022. "An Integrated Nanocomposite Proximity Sensor: Machine Learning-Based Optimization, Simulation, and Experiment" Nanomaterials 12, no. 8: 1269. https://doi.org/10.3390/nano12081269
APA StyleMoheimani, R., Gonzalez, M., & Dalir, H. (2022). An Integrated Nanocomposite Proximity Sensor: Machine Learning-Based Optimization, Simulation, and Experiment. Nanomaterials, 12(8), 1269. https://doi.org/10.3390/nano12081269