
Dynamic Characterization of Microstructured Materials Made of Hexagonal-Shape Particles with Elastic Interfaces



Abstract
1. Introduction
2. Micropolar Continuum
3. Reference Volume Element
4. Numerical Implementation
4.1. Continuum Model
4.2. Discrete Model
5. Simulations
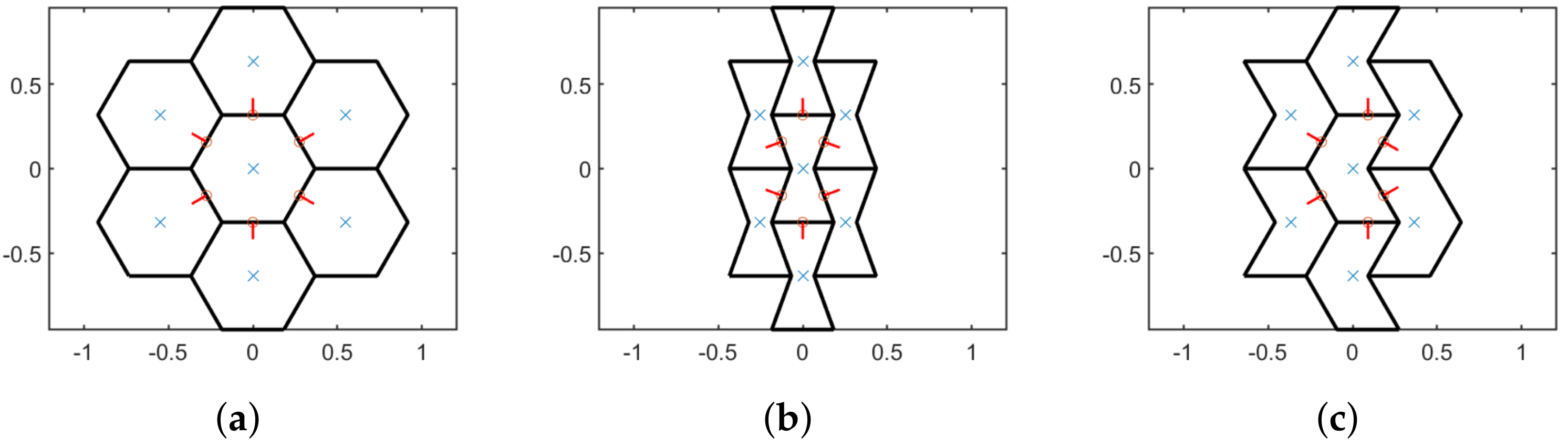
- regular: m;
- hourglass: m;
- asymmetric: m.
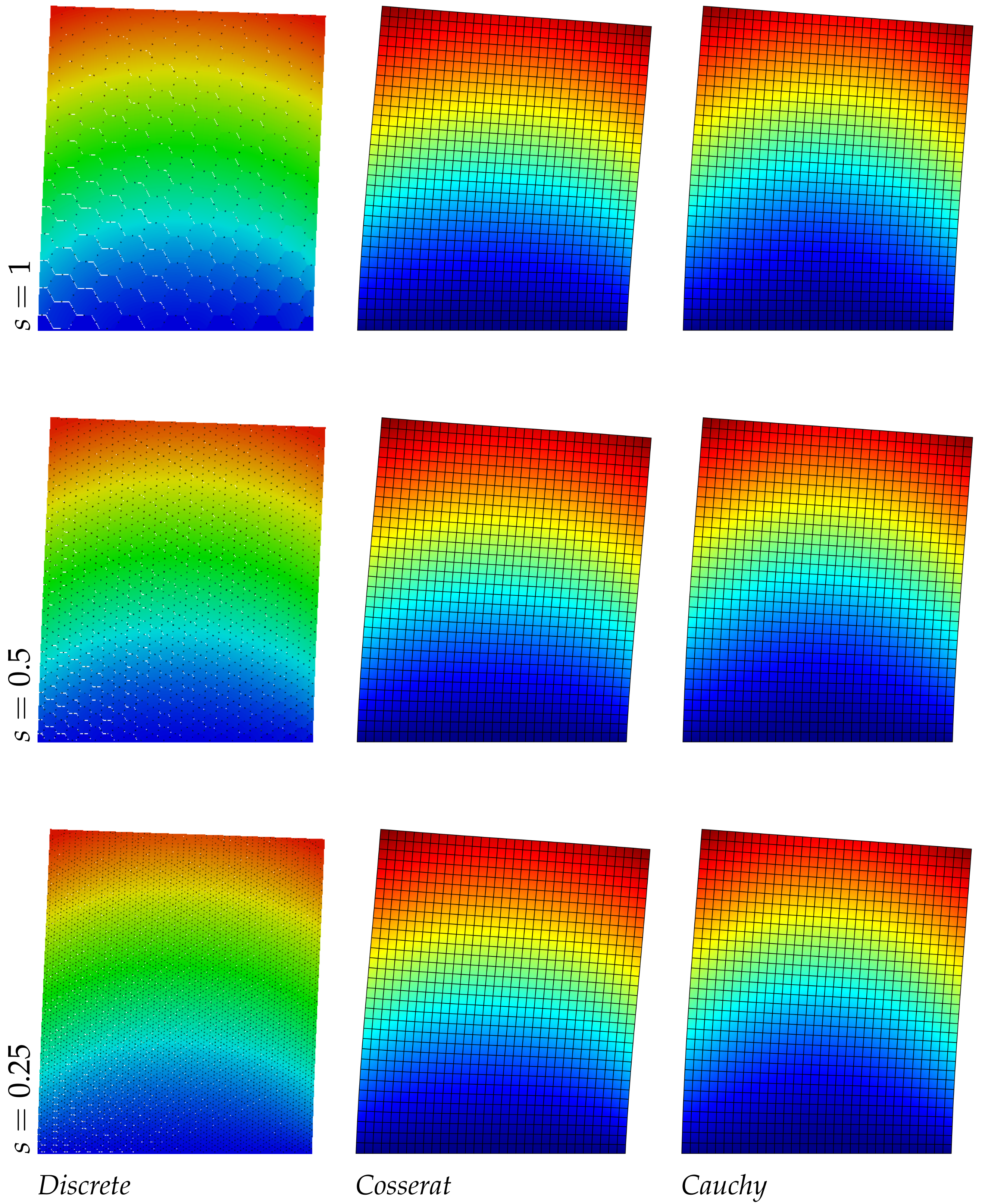
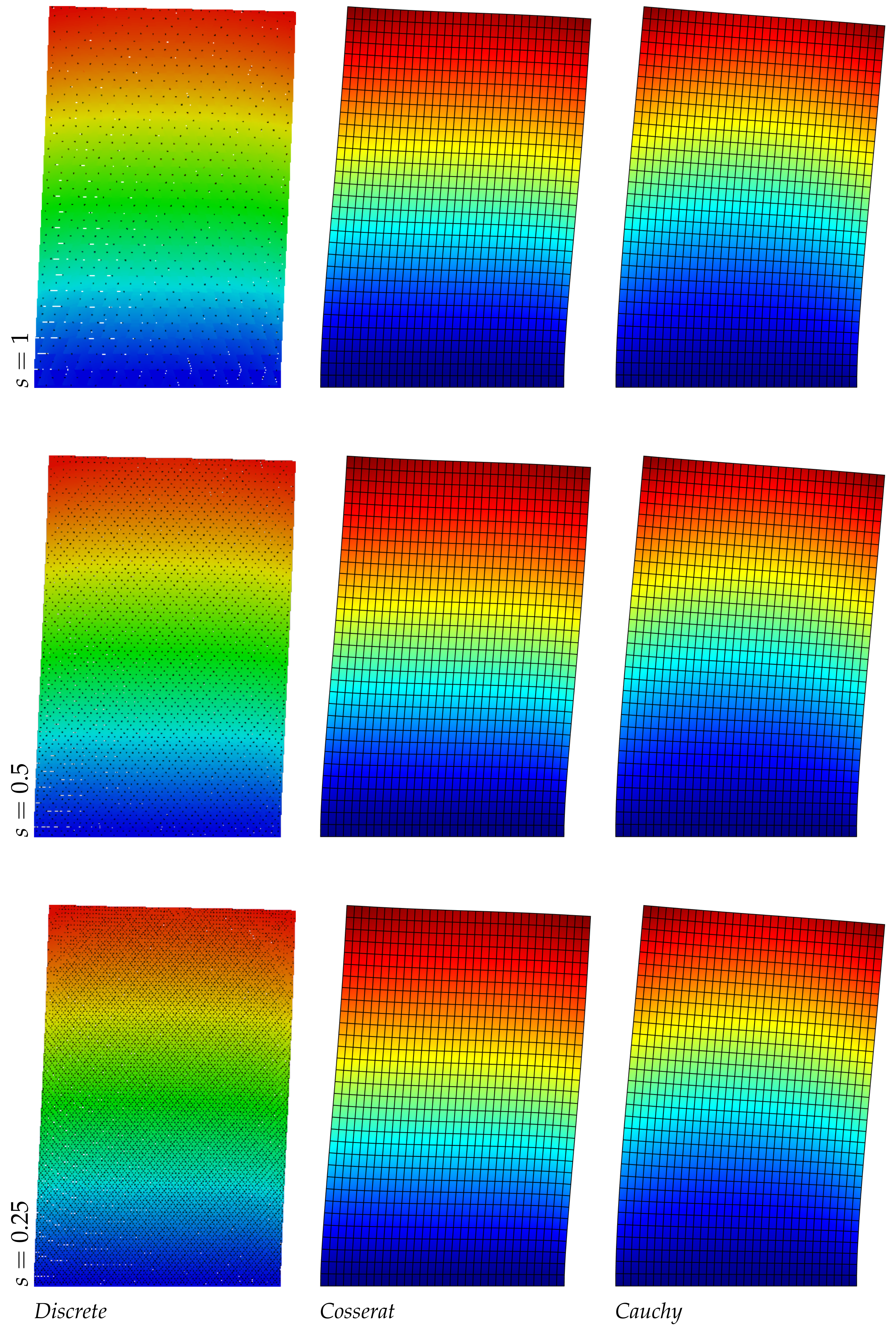
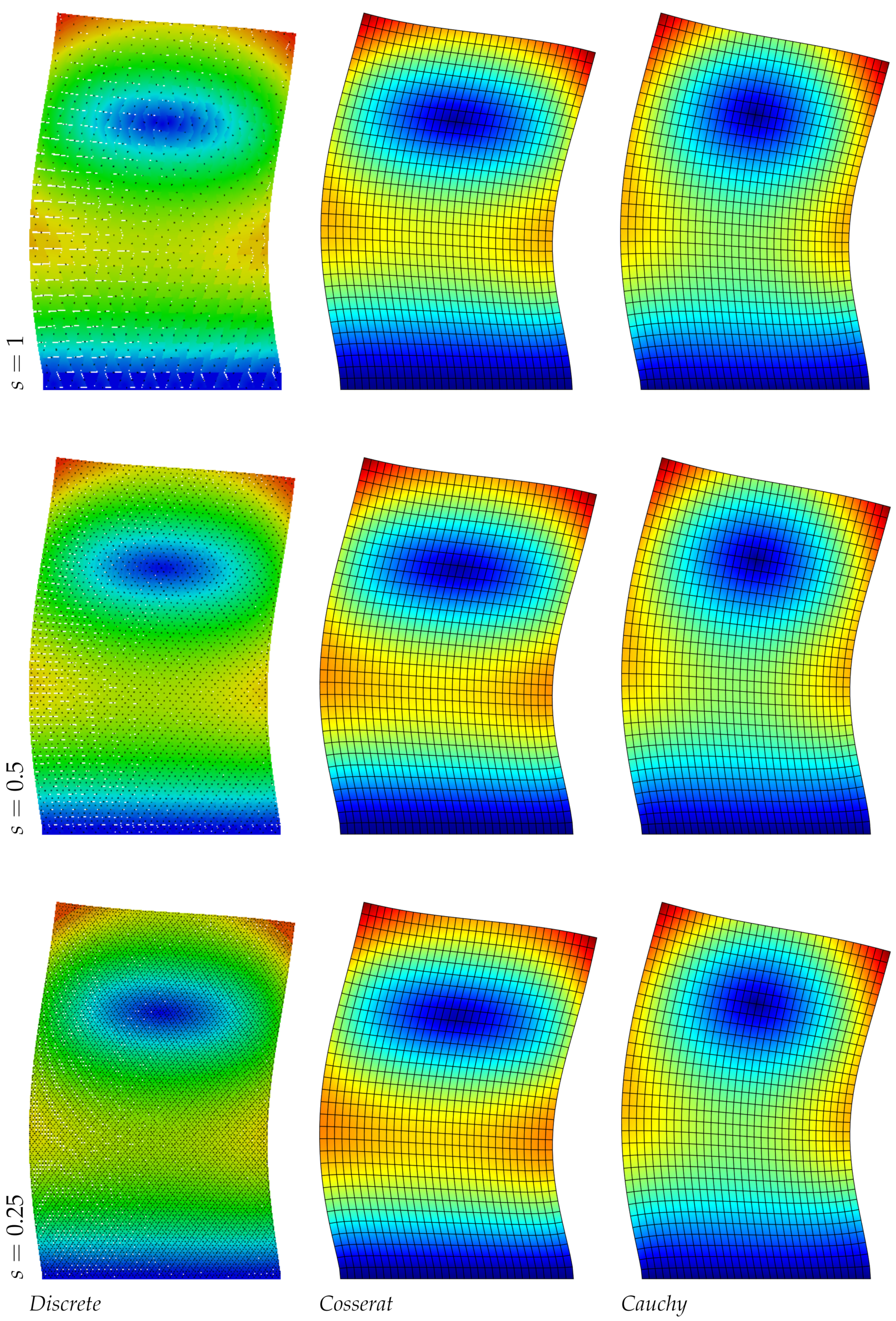
5.1. Regular Geometry
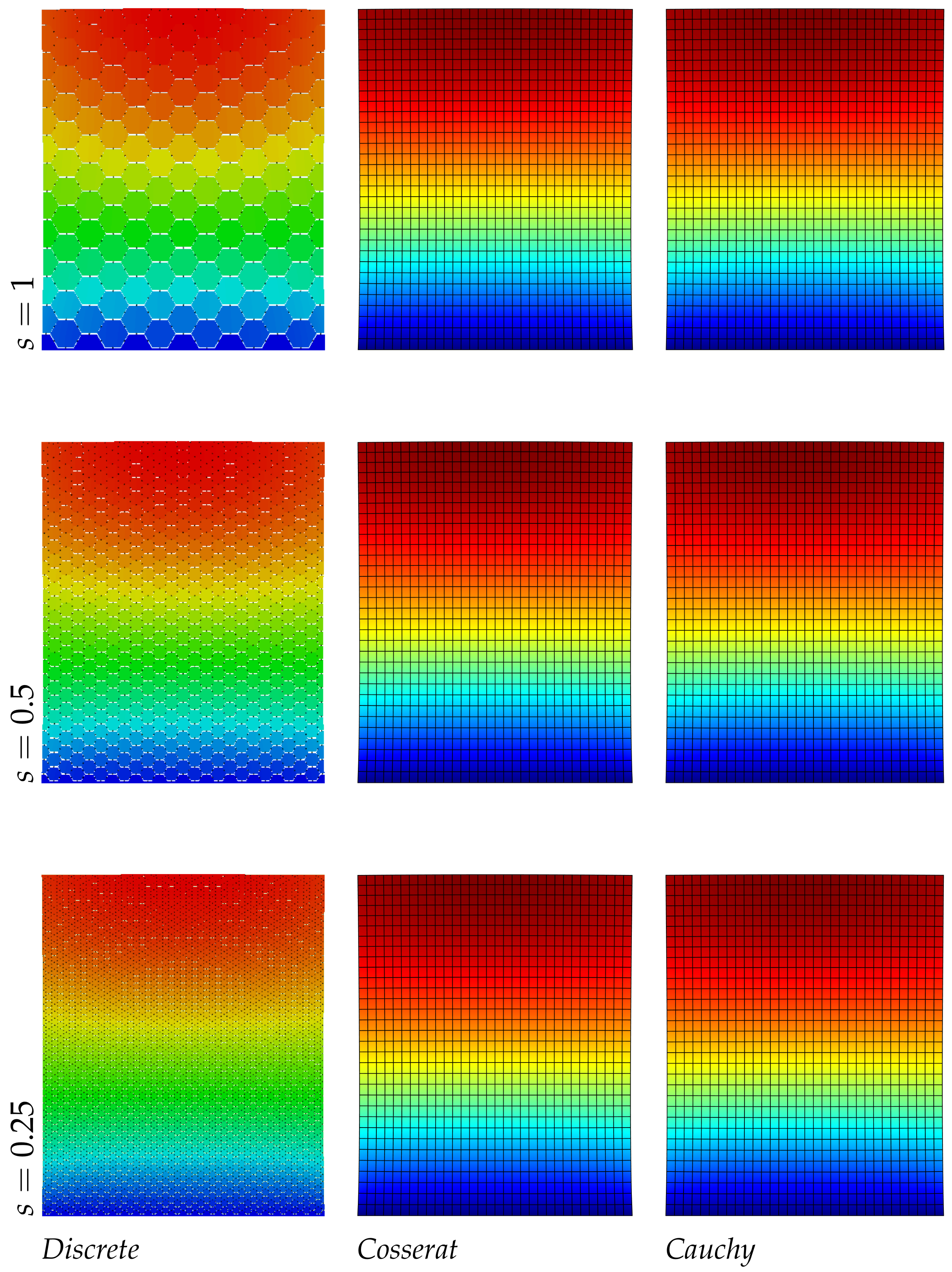
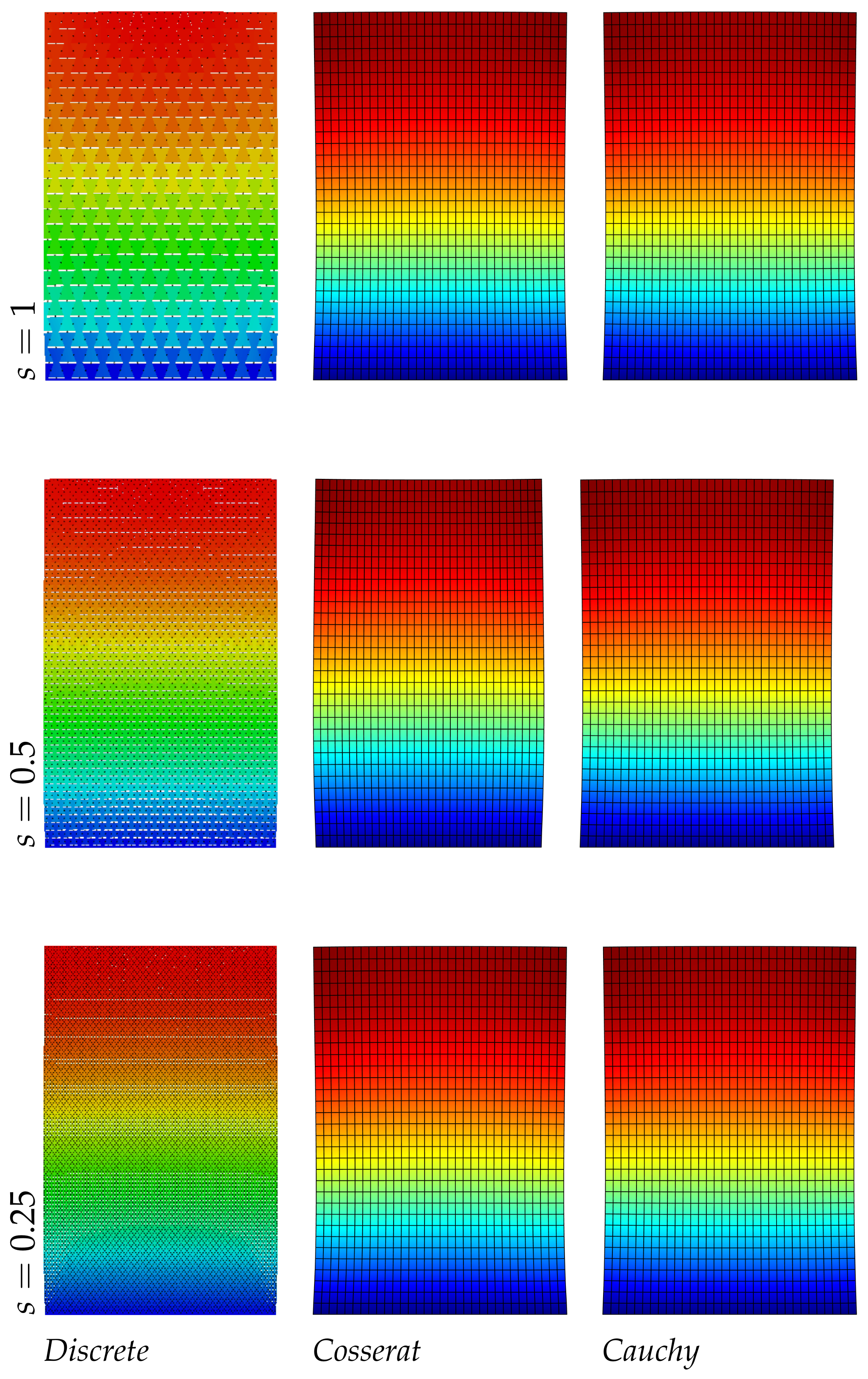
5.2. Hourglass Geometry
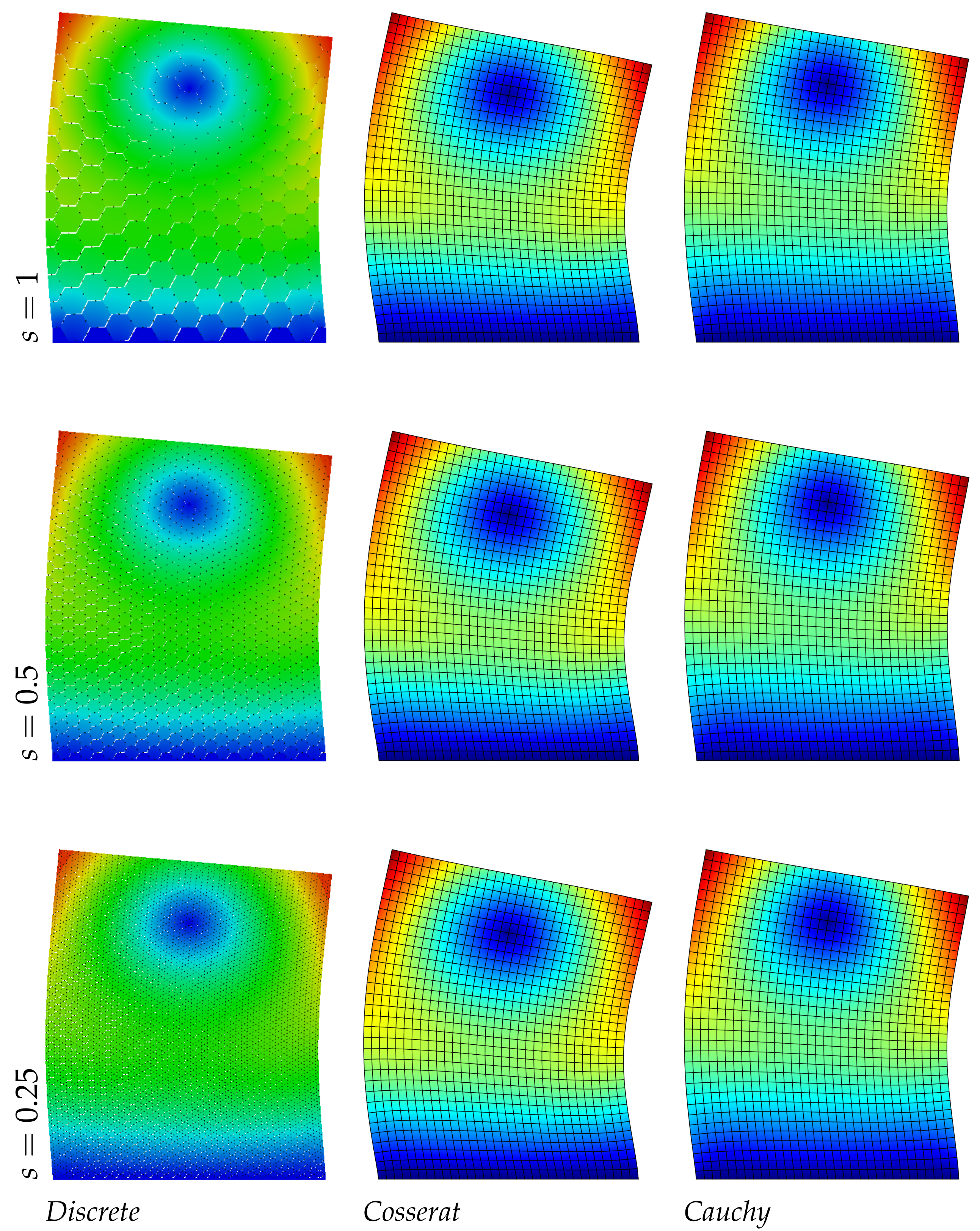
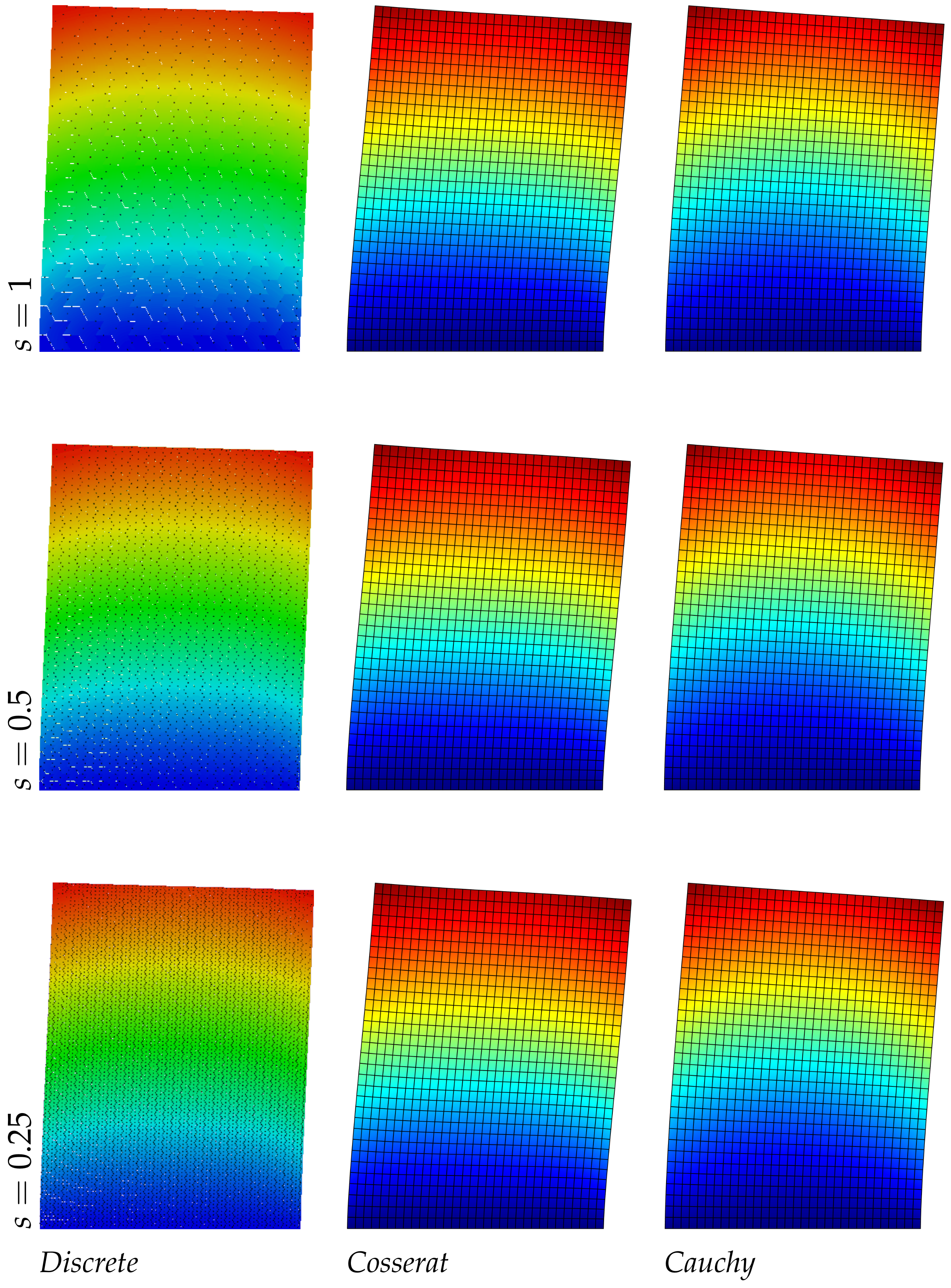
5.3. Asymmetric Geometry
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, D.; Sheng, Y.; Ye, J.; Tan, Y. Discrete element modeling of the microbond test of fiber reinforced composite. Comput. Mater. Sci. 2010, 49, 253–259. [Google Scholar] [CrossRef]
- Baraldi, D.; Reccia, E.; Cecchi, A. In plane loaded masonry walls: DEM and FEM/DEM models. A critical review. Meccanica 2018, 53, 1613–1628. [Google Scholar] [CrossRef]
- Pepe, M.; Pingaro, M.; Trovalusci, P.; Reccia, E.; Leonetti, L. Micromodels for the in-plane failure analysis of masonry walls: Limit Analysis, FEM and FEM/DEM approaches. Frat. IntegritÀ Strutt. 2020, 14, 504–516. [Google Scholar] [CrossRef]
- Tuna, M.; Kirca, M.; Trovalusci, P. Deformation of atomic models and their equivalent continuum counterparts using Eringen’s two-phase local/nonlocal model. Mech. Res. Commun. 2019, 97, 26–32. [Google Scholar] [CrossRef]
- Trovalusci, P.; Masiani, R. Material symmetries of micropolar continua equivalent to lattices. Int. J. Solids Struct. 1999, 36, 2091–2108. [Google Scholar] [CrossRef]
- Trovalusci, P.; Masiani, R. A multifield model for blocky materials based on multiscale description. Int. J. Solids Struct. 2005, 42, 5778–5794. [Google Scholar] [CrossRef][Green Version]
- Altenbach, H.; Eremeyev, V.A. Generalized Continua-from the Theory to Engineering Applications; Springer: Berlin/Heidelberg, Germany, 2012; Volume 541. [Google Scholar]
- Trovalusci, P.; Varano, V.; Rega, G. A generalized continuum formulation for composite microcracked materials and wave propagation in a bar. J. Appl. Mech. 2010, 77, 061002. [Google Scholar] [CrossRef]
- Trovalusci, P. Molecular approaches for multifield continua: Origins and current developments. In Multiscale Modeling of Complex Materials; Springer: Berlin/Heidelberg, Germany, 2014; pp. 211–278. [Google Scholar]
- Settimi, V.; Trovalusci, P.; Rega, G. Dynamical properties of a composite microcracked bar based on a generalized continuum formulation. Contin. Mech. Thermodyn. 2019, 31, 1627–1644. [Google Scholar] [CrossRef]
- Smyshlyaev, V.P.; Cherednichenko, K.D. On rigorous derivation of strain gradient effects in the overall behaviour of periodic heterogeneous media. J. Mech. Phys. Solids 2000, 48, 1325–1357. [Google Scholar] [CrossRef]
- Peerlings, R.; Fleck, N. Computational evaluation of strain gradient elasticity constants. Int. J. Multiscale Comput. Eng. 2004, 2, 599–619. [Google Scholar] [CrossRef]
- Tuna, M.; Leonetti, L.; Trovalusci, P.; Kirca, M. ‘Explicit’and ‘implicit’non-local continuous descriptions for a plate with circular inclusion in tension. Meccanica 2020, 55, 927–944. [Google Scholar] [CrossRef]
- Forest, S.; Pradel, F.; Sab, K. Asymptotic analysis of heterogeneous Cosserat media. Int. J. Solids Struct. 2001, 38, 4585–4608. [Google Scholar] [CrossRef]
- Forest, S. Micromorphic approach for gradient elasticity, viscoplasticity, and damage. J. Eng. Mech. 2009, 135, 117–131. [Google Scholar] [CrossRef]
- Trovalusci, P.; Masiani, R. Non-linear micropolar and classical continua for anisotropic discontinuous materials. Int. J. Solids Struct. 2003, 40, 1281–1297. [Google Scholar] [CrossRef]
- Trovalusci, P.; Pau, A. Derivation of microstructured continua from lattice systems via principle of virtual works: The case of masonry-like materials as micropolar, second gradient and classical continua. Acta Mech. 2014, 225, 157–177. [Google Scholar] [CrossRef]
- Tuna, M.; Trovalusci, P. Scale dependent continuum approaches for discontinuous assemblies:‘Explicit’and ‘implicit’non-local models. Mech. Res. Commun. 2020, 103, 103461. [Google Scholar] [CrossRef]
- Eringen, A.C. Microcontinuum Field Theories: I. Foundations and Solids; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Barretta, R.; Faghidian, S.A.; Luciano, R. Longitudinal vibrations of nano-rods by stress-driven integral elasticity. Mech. Adv. Mater. Struct. 2019, 26, 1307–1315. [Google Scholar] [CrossRef]
- Bacciocchi, M.; Tarantino, A. Natural Frequency Analysis of Functionally Graded Orthotropic Cross-Ply Plates Based on the Finite Element Method. Math. Comput. Appl. 2019, 24, 52. [Google Scholar] [CrossRef]
- Cornacchia, F.; Fabbrocino, F.; Fantuzzi, N.; Luciano, R.; Penna, R. Analytical solution of cross- and angle-ply nano plates with strain gradient theory for linear vibrations and buckling. Mech. Adv. Mater. Struct. 2019, 28, 1201–1215. [Google Scholar] [CrossRef]
- Cornacchia, F.; Fantuzzi, N.; Luciano, R.; Penna, R. Solution for cross- and angle-ply laminated Kirchhoff nano plates in bending using strain gradient theory. Compos. Part B Eng. 2019, 173, 107006. [Google Scholar] [CrossRef]
- Bacciocchi, M.; Fantuzzi, N.; Ferreira, A. Conforming and nonconforming laminated finite element Kirchhoff nanoplates in bending using strain gradient theory. Comput. Struct. 2020, 239, 106322. [Google Scholar] [CrossRef]
- Bacciocchi, M.; Fantuzzi, N.; Ferreira, A.J.M. Static finite element analysis of thin laminated strain gradient nanoplates in hygro-thermal environment. Contin. Mech. Thermodyn. 2020, 1–24. [Google Scholar] [CrossRef]
- Tocci Monaco, G.; Fantuzzi, N.; Fabbrocino, F.; Luciano, R. Hygro-thermal vibrations and buckling of laminated nanoplates via nonlocal strain gradient theory. Compos. Struct. 2020, 262, 113337. [Google Scholar] [CrossRef]
- Tocci Monaco, G.; Fantuzzi, N.; Fabbrocino, F.; Luciano, R. Critical Temperatures for Vibrations and Buckling of Magneto-Electro-Elastic Nonlocal Strain Gradient Plates. Nanomaterials 2021, 11, 87. [Google Scholar] [CrossRef]
- Bacciocchi, M.; Tarantino, A.M. Third-Order Theory for the Bending Analysis of Laminated Thin and Thick Plates Including the Strain Gradient Effect. Materials 2021, 14, 1771. [Google Scholar] [CrossRef] [PubMed]
- Żur, K.K. Free vibration analysis of elastically supported functionally graded annular plates via quasi-Green’s function method. Compos. Part B Eng. 2018, 144, 37–55. [Google Scholar] [CrossRef]
- Kim, J.; Żur, K.K.; Reddy, J. Bending, free vibration, and buckling of modified couples stress-based functionally graded porous micro-plates. Compos. Struct. 2019, 209, 879–888. [Google Scholar] [CrossRef]
- Żur, K.K. Free vibration analysis of discrete-continuous functionally graded circular plate via the Neumann series method. Appl. Math. Model. 2019, 73, 166–189. [Google Scholar] [CrossRef]
- Żur, K.K.; Arefi, M.; Kim, J.; Reddy, J. Free vibration and buckling analyses of magneto-electro-elastic FGM nanoplates based on nonlocal modified higher-order sinusoidal shear deformation theory. Compos. Part B Eng. 2020, 182, 107601. [Google Scholar] [CrossRef]
- Zhou, L.; Nie, B.; Ren, S.; Żur, K.K.; Kim, J. On the hygro-thermo-electro-mechanical coupling effect on static and dynamic responses of piezoelectric beams. Compos. Struct. 2020, 259, 113248. [Google Scholar] [CrossRef]
- Żur, K.K.; Jankowski, P. Multiparametric Analytical Solution for the Eigenvalue Problem of FGM Porous Circular Plates. Symmetry 2019, 11. [Google Scholar] [CrossRef]
- Cappelli, L.; Montemurro, M.; Dau, F.; Guillaumat, L. Characterisation of composite elastic properties by means of a multi-scale two-level inverse approach. Compos. Struct. 2018, 204, 767–777. [Google Scholar] [CrossRef]
- Cappelli, L.; Balokas, G.; Montemurro, M.; Dau, F.; Guillaumat, L. Multi-scale identification of the elastic properties variability for composite materials through a hybrid optimisation strategy. Compos. Part B Eng. 2019, 176, 107193. [Google Scholar] [CrossRef]
- Cappelli, L.; Montemurro, M.; Dau, F.; Guillaumat, L. Multi-scale identification of the viscoelastic behaviour of composite materials through a non-destructive test. Mech. Mater. 2019, 137, 103137. [Google Scholar] [CrossRef]
- Azoti, W.; Koutsawa, Y.; Tchalla, A.; Makradi, A.; Belouettar, S. Micromechanics-based multi-site modeling of elastoplastic behavior of composite materials. Int. J. Solids Struct. 2015, 59, 198–207. [Google Scholar] [CrossRef]
- Tchalla, A.; Azoti, W.; Koutsawa, Y.; Makradi, A.; Belouettar, S.; Zahrouni, H. Incremental mean-fields micromechanics scheme for non-linear response of ductile damaged composite materials. Compos. Part B Eng. 2015, 69, 169–180. [Google Scholar] [CrossRef]
- Gentieu, T.; Catapano, A.; Jumel, J.; Broughton, J. A mean-field homogenisation scheme with CZM-based interfaces describing progressive inclusions debonding. Compos. Struct. 2019, 229, 111398. [Google Scholar] [CrossRef]
- Gentieu, T.; Jumel, J.; Catapano, A.; Broughton, J. Size effect in particle debonding: Comparisons between finite fracture mechanics and cohesive zone model. J. Compos. Mater. 2019, 53, 1941–1954. [Google Scholar] [CrossRef]
- Fantuzzi, N.; Trovalusci, P.; Dharasura, S. Mechanical behavior of anisotropic composite materials as micropolar continua. Front. Mater. 2019, 6, 59. [Google Scholar] [CrossRef]
- Pau, A.; Trovalusci, P. Block masonry as equivalent micropolar continua: The role of relative rotations. Acta Mech. 2012, 223, 1455–1471. [Google Scholar] [CrossRef]
- Jury, S.; Bladon, P.; Cates, M.; Krishna, S.; Hagen, M.; Ruddock, N.; Warren, P. Simulation of amphiphilic mesophases using dissipative particle dynamics. Phys. Chem. Chem. Phys. 1999, 1, 2051–2056. [Google Scholar] [CrossRef]
- Slutsky, L.J.; Garland, C.W. Lattice Dynamics of Hexagonal Close-Packed Metals. J. Chem. Phys. 1957, 26, 787–793. [Google Scholar] [CrossRef]
- Bonsall, L.; Maradudin, A. Some static and dynamical properties of a two-dimensional Wigner crystal. Phys. Rev. B 1977, 15, 1959–1973. [Google Scholar] [CrossRef]
- Bates, M.A.; Walker, M. Dissipative particle dynamics simulation of quaternary bolaamphiphiles: Multi-colour tiling in hexagonal columnar phases. Phys. Chem. Chem. Phys. 2009, 11, 1893–1900. [Google Scholar] [CrossRef]
- Kinra, V.; Henderson, B.; Maslov, K. Elastodynamic response of layers of spherical particles in hexagonal and square periodic arrangements. J. Mech. Phys. Solids 1999, 47, 2147–2170. [Google Scholar] [CrossRef]
- Krupenin, V.L. Description of the Fields of Vibration in 2D Latticed Structures with Triangular (Hexagonal) Cells. J. Mach. Manuf. Reliab. 2019, 48, 525–534. [Google Scholar] [CrossRef]
- Yan, F.; Hixson, C.A.; Earl, D.J. Computer simulations of linear rigid particles that form chiral superstructures and tilted smectic phases. Soft Matter 2009, 5, 4477–4483. [Google Scholar] [CrossRef]
- Preclik, T.; Rüde, U. Ultrascale simulations of non-smooth granular dynamics. Comput. Part. Mech. 2015, 2, 173–196. [Google Scholar] [CrossRef]
- Fang, H.; Bai, S.L.; Wong, C.P. “White graphene”—Hexagonal boron nitride based polymeric composites and their application in thermal management. Compos. Commun. 2016, 2, 19–24. [Google Scholar] [CrossRef]
- Li, X.; Liang, Y.; Duan, Q.; Schrefler, B.A.; Du, Y. A mixed finite element procedure of gradient Cosserat continuum for second-order computational homogenisation of granular materials. Comput. Mech. 2014, 54, 1331–1356. [Google Scholar] [CrossRef]
- Godio, M.; Stefanou, I.; Sab, K.; Sulem, J. Dynamic finite element formulation for Cosserat elastic plates. Int. J. Numer. Methods Eng. 2015, 101, 992–1018. [Google Scholar] [CrossRef]
- Birsan, M. Several results in the dynamic theory of thermoelastic Cosserat shells with voids. Mech. Res. Commun. 2006, 33, 157–176. [Google Scholar] [CrossRef]
- Herrmann, G.; Achenbach, J.D. Applications of theories of generalized Cosserat continua to the dynamics of composite materials. In Mechanics of Generalized Continua; Springer: Berlin/Heidelberg, Germany, 1968; pp. 69–79. [Google Scholar]
- Godio, M.; Stefanou, I.; Sab, K.; Sulem, J. Cosserat elastoplastic finite elements for masonry structures. In Key Engineering Materials; Trans Tech Publ: Stafa-Zurich, Switzerland, 2015; Volume 624, pp. 131–138. [Google Scholar]
- Cerrolaza, M.; Sulem, J.; Elbied, A. A Cosserat non-linear finite element analysis software for blocky structures. Adv. Eng. Softw. 1999, 30, 69–83. [Google Scholar] [CrossRef]
- Tejchman, J.; Wu, W. Dynamic patterning of shear bands in Cosserat continuum. J. Eng. Mech. 1997, 123, 123–133. [Google Scholar] [CrossRef]
- Vasiliev, A.A. Multifield modeling of Cosserat lattice dynamics. Acoust. Phys. 2010, 56, 831–839. [Google Scholar] [CrossRef]
- Fantuzzi, N.; Leonetti, L.; Trovalusci, P.; Tornabene, F. Some novel numerical applications of Cosserat continua. Int. J. Comput. Methods 2018, 15, 1850054. [Google Scholar] [CrossRef]
- Leonetti, L.; Fantuzzi, N.; Trovalusci, P.; Tornabene, F. Scale effects in orthotropic composite assemblies as micropolar continua: A comparison between weak-and strong-form finite element solutions. Materials 2019, 12, 758. [Google Scholar] [CrossRef]
- Fantuzzi, N.; Trovalusci, P.; Luciano, R. Multiscale analysis of anisotropic materials with hexagonal microstructure as micropolar continua. Int. J. Multiscale Comput. Eng. 2020, 18, 26–284. [Google Scholar] [CrossRef]
- Fantuzzi, N.; Trovalusci, P.; Luciano, R. Material Symmetries in Homogenized Hexagonal-Shaped Composites as Cosserat Continua. Symmetry 2020, 12, 441. [Google Scholar] [CrossRef]
- Colatosti, M.; Fantuzzi, N.; Trovalusci, P.; Masiani, R. New insights on homogenization for hexagonal-shaped composites as Cosserat continua. Meccanica 2021, 1–20. [Google Scholar] [CrossRef]
- Masiani, R.; Rizzi, N.; Trovalusci, P. Masonry as structured continuum. Meccanica 1995, 30, 673–683. [Google Scholar] [CrossRef]
- Masiani, R.; Trovalusci, P. Cosserat and Cauchy materials as continuum models of brick masonry. Meccanica 1996, 31, 421–432. [Google Scholar] [CrossRef]
- Mariano, P.M.; Trovalusci, P. Constitutive Relations for Elastic Microcracked Bodies: From a Lattice Model to a Multifield Continuum Description. Int. J. Damage Mech. 1999, 8, 153–173. [Google Scholar] [CrossRef]
- Trovalusci, P.; Capecchi, D.; Ruta, G. Genesis of the multiscale approach for materials with microstructure. Arch. Appl. Mech. 2009, 79, 981. [Google Scholar] [CrossRef]
- Civalek, Ö.; Demir, Ç.; Akgöz, B. Free vibration and bending analyses of cantilever microtubules based on nonlocal continuum model. Math. Comput. Appl. 2010, 15, 289–298. [Google Scholar] [CrossRef]
- Uzun, B.; Civalek, Ö. Nonlocal FEM formulation for vibration analysis of nanowires on elastic matrix with different materials. Math. Comput. Appl. 2019, 24, 38. [Google Scholar] [CrossRef]
- Montemurro, M.; Vincenti, A.; Vannucci, P. Design of the elastic properties of laminates with a minimum number of plies. Mech. Compos. Mater. 2012, 48, 369–390. [Google Scholar] [CrossRef]
- Montemurro, M. The polar analysis of the Third-order Shear Deformation Theory of laminates. Compos. Struct. 2015, 131, 775–789. [Google Scholar] [CrossRef]
- Montemurro, M. An extension of the polar method to the First-order Shear Deformation Theory of laminates. Compos. Struct. 2015, 127, 328–339. [Google Scholar] [CrossRef]
- Trovalusci, P.; Augusti, G. A continuum model with microstructure for materials with flaws and inclusions. Le Journal de Physique IV 1998, 8, Pr8-383. [Google Scholar] [CrossRef]
- Wojciechowski, K. Constant thermodynamic tension Monte Carlo studies of elastic properties of a two-dimensional system of hard cyclic hexamers. Mol. Phys. 1987, 61, 1247–1258. [Google Scholar] [CrossRef]
- Lakes, R. Foam structures with a negative Poisson’s ratio. Science 1987, 235, 1038–1041. [Google Scholar] [CrossRef]
- Evans, K.E. Auxetic polymers: A new range of materials. Endeavour 1991, 15, 170–174. [Google Scholar] [CrossRef]
- Scarpa, F.; Narojczyk, J.; Wojciechowski, K.; Inman, D. Self-filtering oscillations in carbon nanotube hetero-junctions. Nanotechnology 2011, 22, 465501. [Google Scholar] [CrossRef]
- Czarnecki, S.; Lewiński, T. Pareto Optimal Design of Non-Homogeneous Isotropic Material Properties for the Multiple Loading Conditions. Phys. Status Solidi 2017, 254, 1600821. [Google Scholar] [CrossRef]
- Czarnecki, S. An Explicit Construction of the Underlying Laminated Microstructure of the Least Compliant Elastic Bodies. Phys. Status Solidi 2019, 256, 1800039. [Google Scholar] [CrossRef]
- Czarnecki, S.; Łukasiak, T. Recovery of the Auxetic Microstructures Appearing in the Least Compliant Continuum Two-Dimensional Bodies. Phys. Status Solidi 2020, 257, 1900676. [Google Scholar] [CrossRef]
- Ruzzene, M.; Scarpa, F. Directional and band-gap behavior of periodic auxetic lattices. Phys. Status Solidi 2005, 242, 665–680. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Regular | Hourglass | |
|---|---|---|
| Asymmetric | |
|---|---|
| RVE | |||
|---|---|---|---|
| Regular | |||
| 35.73 | 1.392 | 25.68 | |
| 2.230 | 0.348 | 6.406 | |
| 0.141 | 0.087 | 1.621 | |
| Hourglass | |||
| 8.210 | 0.636 | 12.92 | |
| 0.512 | 0.159 | 3.230 | |
| 0.032 | 0.039 | 0.820 | |
| Asymmetric | |||
| 16.06 | 0.928 | 17.31 | |
| 0.960 | 0.232 | 4.137 | |
| 0.063 | 0.058 | 0.092 | |
| Scale | Discrete | Cosserat | Error (%) | Cauchy | Error (%) |
|---|---|---|---|---|---|
| Mode 1 | |||||
| 14.78 | 14.07 | −4.77 | 15.34 | 3.82 | |
| 14.43 | 13.98 | −3.10 | 15.34 | 6.37 | |
| 14.22 | 13.94 | −1.98 | 15.34 | 7.89 | |
| Mode 2 | |||||
| 35.98 | 35.12 | 35.13 | −2.38 | ||
| 35.64 | 35.11 | −1.49 | 35.13 | −1.45 | |
| 35.45 | 35.11 | −0.98 | 35.13 | −0.93 | |
| Mode 3 | |||||
| 42.99 | 41.04 | −4.56 | 49.24 | 14.52 | |
| 42.15 | 41.10 | −2.49 | 49.24 | 16.82 | |
| 41.60 | 41.02 | −1.41 | 49.24 | 18.36 | |
| Scale | Discrete | Cosserat | Error (%) | Cauchy | Error (%) |
|---|---|---|---|---|---|
| Mode 1 | |||||
| 13.03 | 13.55 | 3.97 | 17.06 | 30.95 | |
| 12.86 | 12.94 | 0.62 | 17.06 | 32.64 | |
| 12.76 | 12.70 | −0.44 | 17.06 | 33.69 | |
| Mode 2 | |||||
| 39.88 | 43.39 | 8.77 | 56.83 | 42.46 | |
| 39.22 | 40.39 | 2.98 | 56.83 | 44.88 | |
| 38.79 | 39.04 | 0.63 | 56.83 | 46.47 | |
| Mode 3 | |||||
| 52.22 | 51.47 | −1.43 | 51.48 | −1.42 | |
| 50.20 | 51.44 | 2.48 | 51.48 | 2.55 | |
| 51.91 | 51.43 | −0.92 | 51.48 | −0.83 | |
| Scale | Discrete | Cosserat | Error (%) | Cauchy | Error (%) |
|---|---|---|---|---|---|
| Mode 1 | |||||
| 14.50 | 14.44 | −0.41 | 16.44 | 13.38 | |
| 14.25 | 14.14 | −0.76 | 16.44 | 15.38 | |
| 14.11 | 14.03 | −0.59 | 16.44 | 16.51 | |
| Mode 2 | |||||
| 42.48 | 42.93 | 1.06 | 43.38 | 2.11 | |
| 42.41 | 42.39 | −0.06 | 43.38 | 2.27 | |
| 41.94 | 41.89 | −0.11 | 43.38 | 3.41 | |
| Mode 3 | |||||
| 44.29 | 43.97 | −0.72 | 52.40 | 18.30 | |
| 43.55 | 43.45 | −0.24 | 52.40 | 20.31 | |
| 43.35 | 43.38 | 0.08 | 52.40 | 20.87 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Colatosti, M.; Fantuzzi, N.; Trovalusci, P. Dynamic Characterization of Microstructured Materials Made of Hexagonal-Shape Particles with Elastic Interfaces. Nanomaterials 2021, 11, 1781. https://doi.org/10.3390/nano11071781
Colatosti M, Fantuzzi N, Trovalusci P. Dynamic Characterization of Microstructured Materials Made of Hexagonal-Shape Particles with Elastic Interfaces. Nanomaterials. 2021; 11(7):1781. https://doi.org/10.3390/nano11071781
Chicago/Turabian StyleColatosti, Marco, Nicholas Fantuzzi, and Patrizia Trovalusci. 2021. "Dynamic Characterization of Microstructured Materials Made of Hexagonal-Shape Particles with Elastic Interfaces" Nanomaterials 11, no. 7: 1781. https://doi.org/10.3390/nano11071781
APA StyleColatosti, M., Fantuzzi, N., & Trovalusci, P. (2021). Dynamic Characterization of Microstructured Materials Made of Hexagonal-Shape Particles with Elastic Interfaces. Nanomaterials, 11(7), 1781. https://doi.org/10.3390/nano11071781