
A Computational Analysis for Active Flow and Pressure Control Using Moving Roller Peristalsis



Abstract
:1. Introduction
2. Materials and Methods
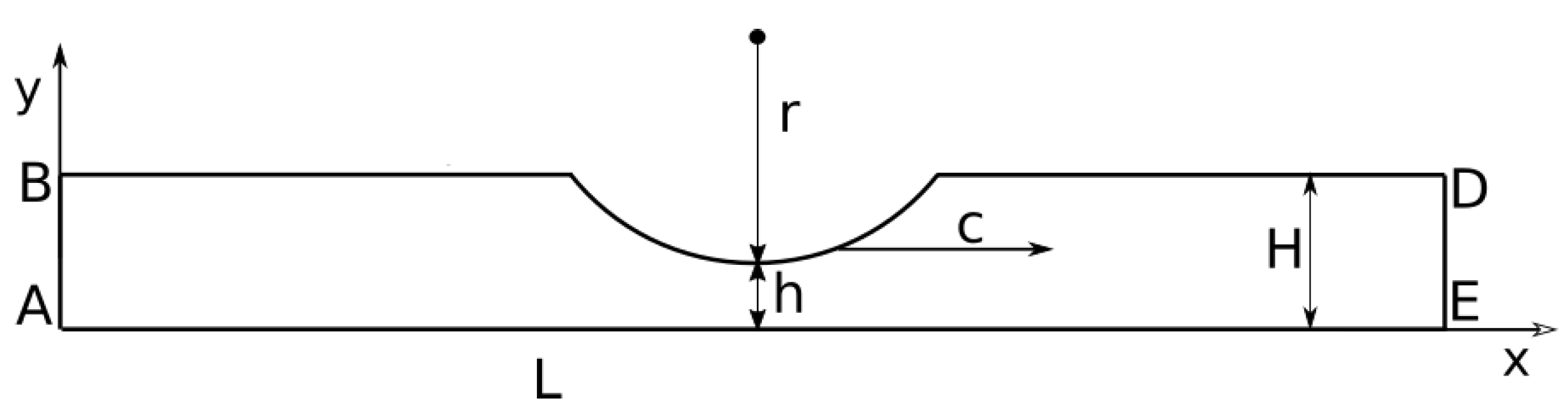
2.1. Geometry
2.2. Mathematical Model
2.3. Computational Method
3. Results and Discussion
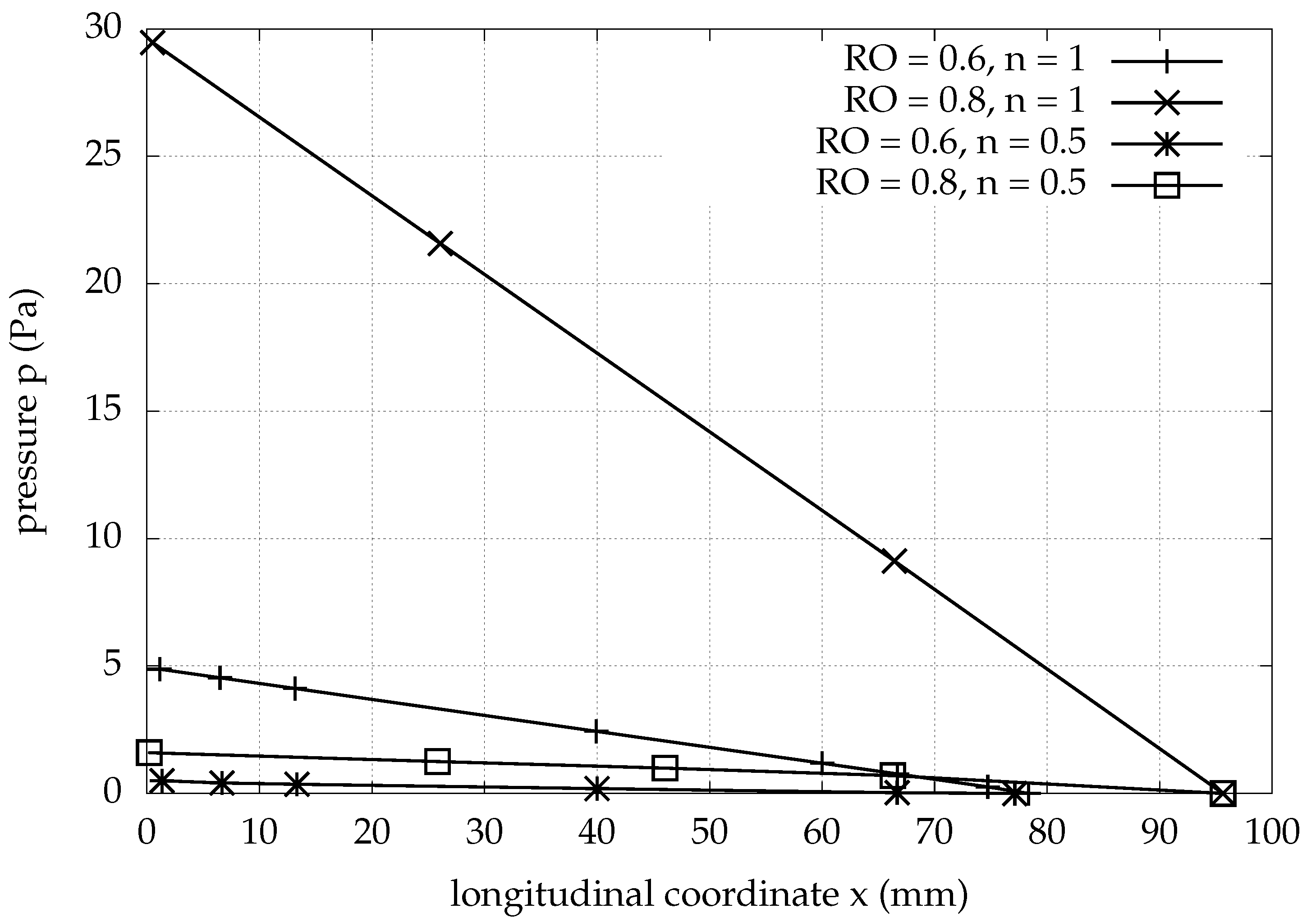
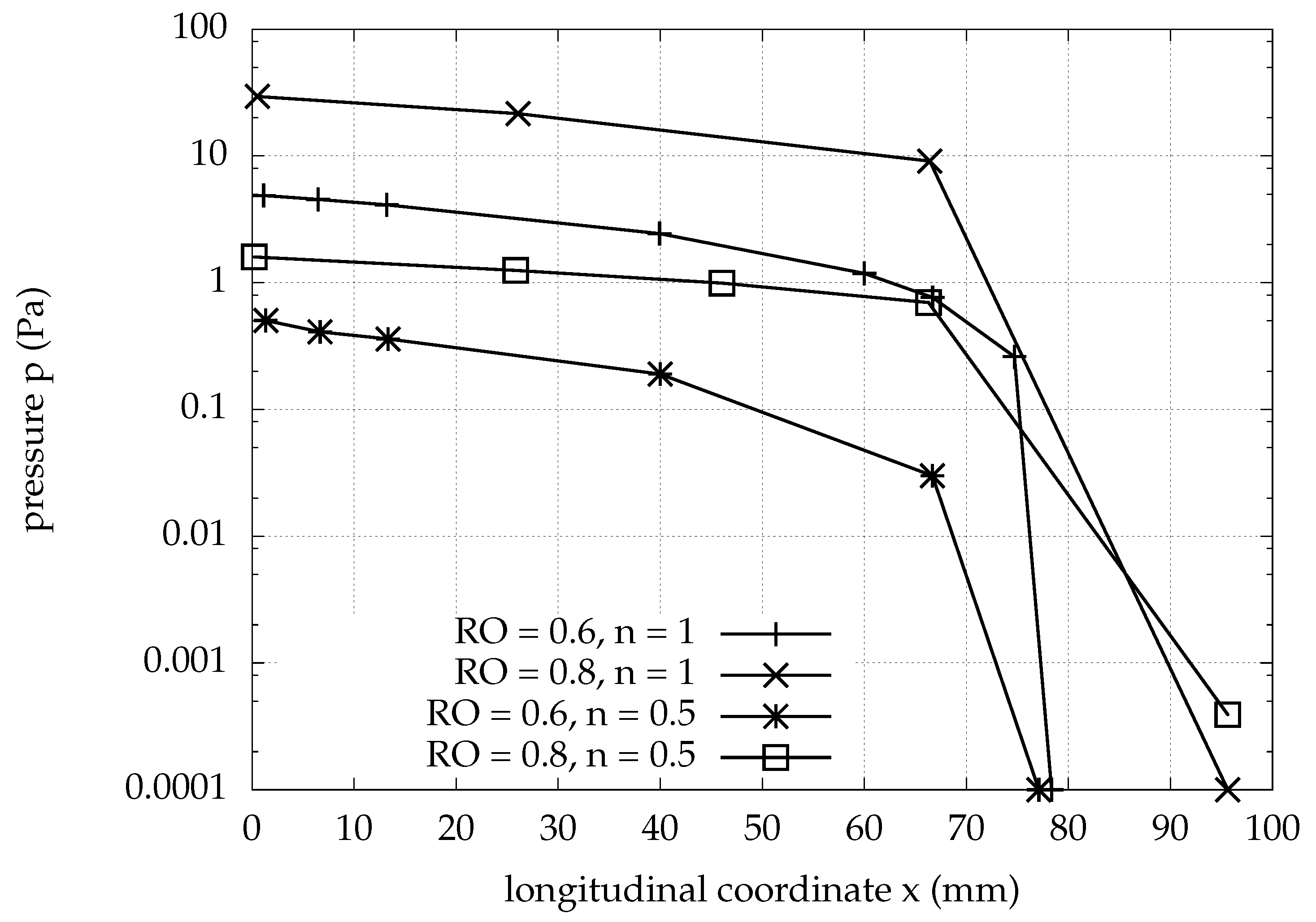
3.1. Varying Relative Occlusion
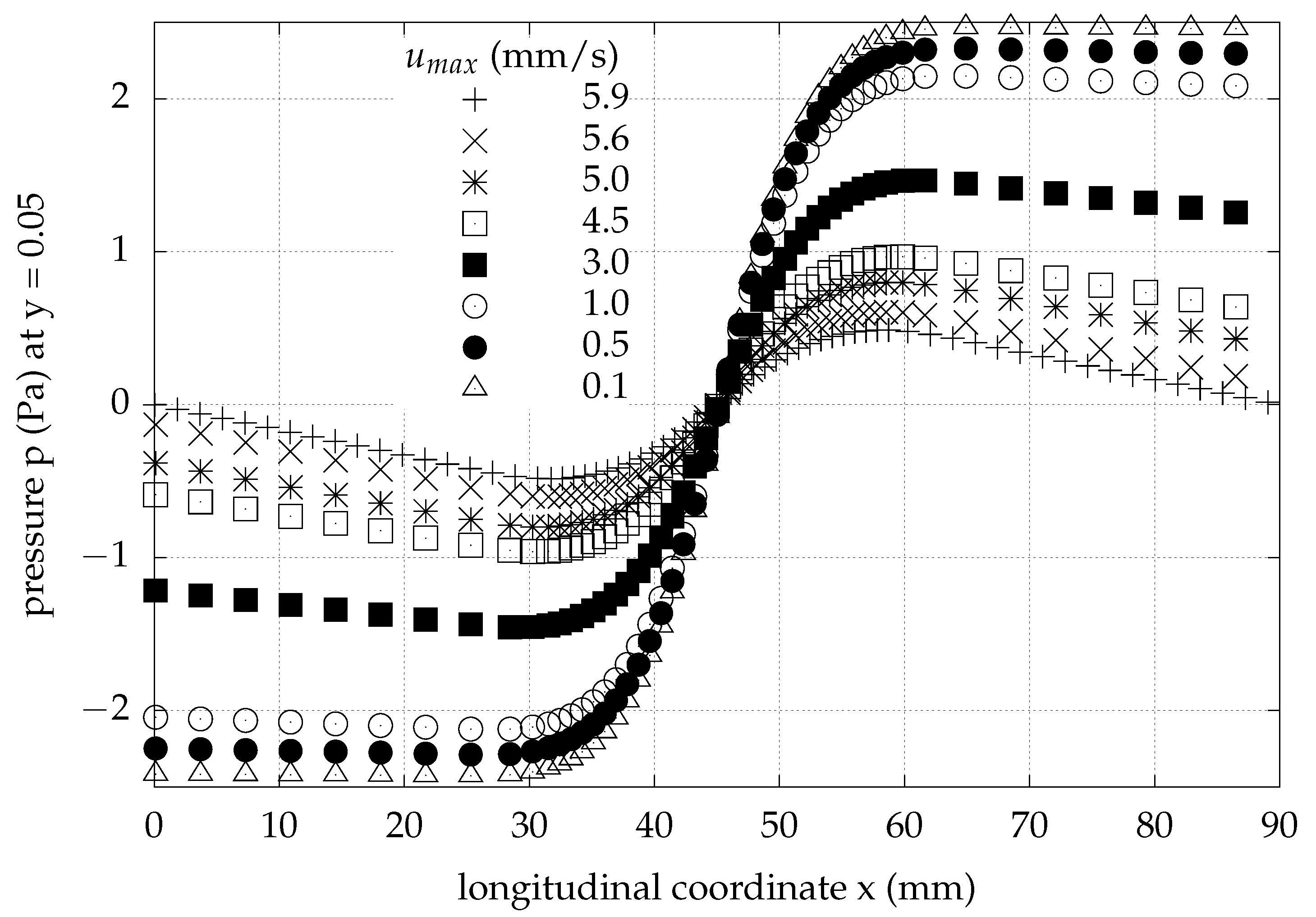
3.2. Varying Roller Speed
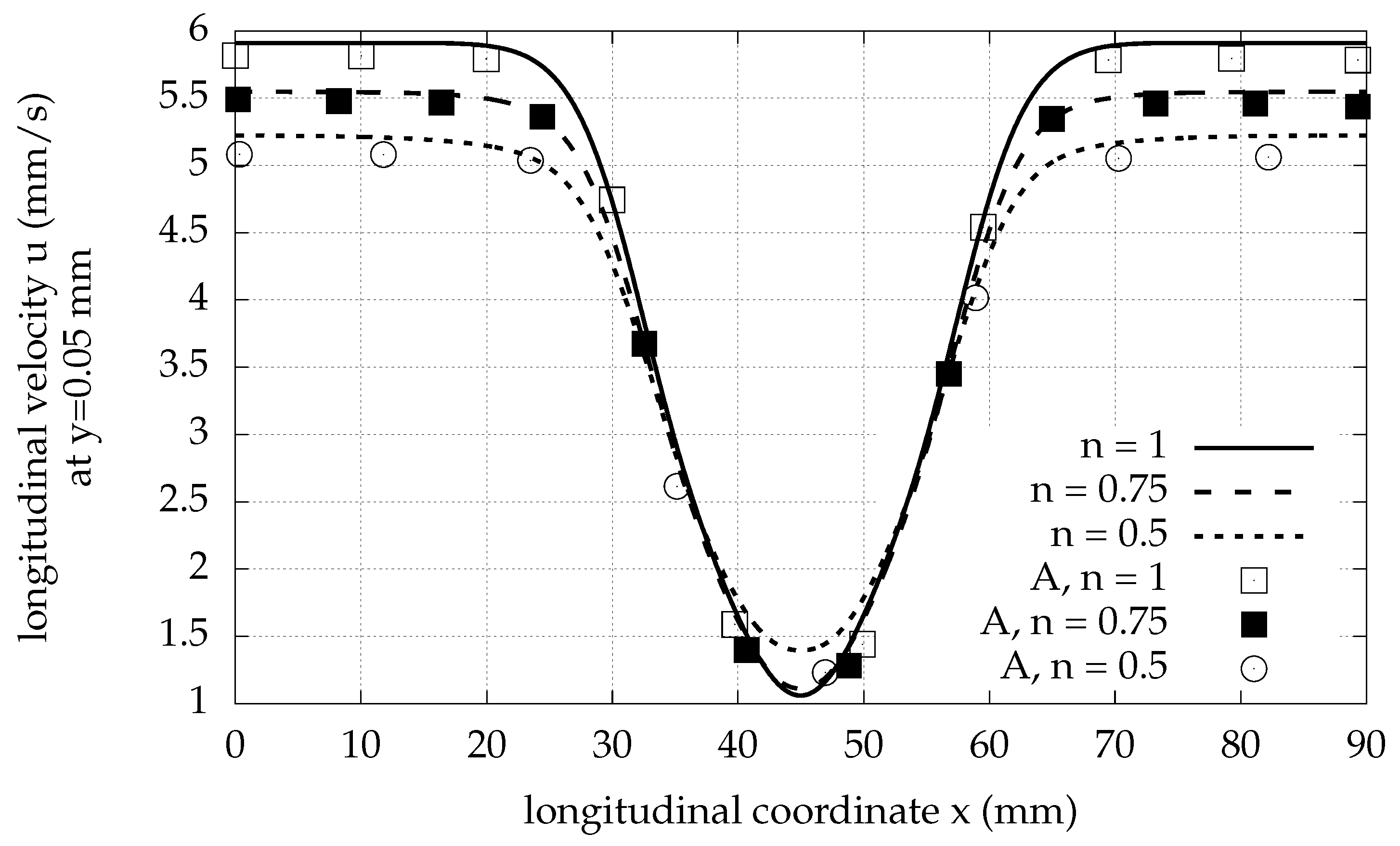
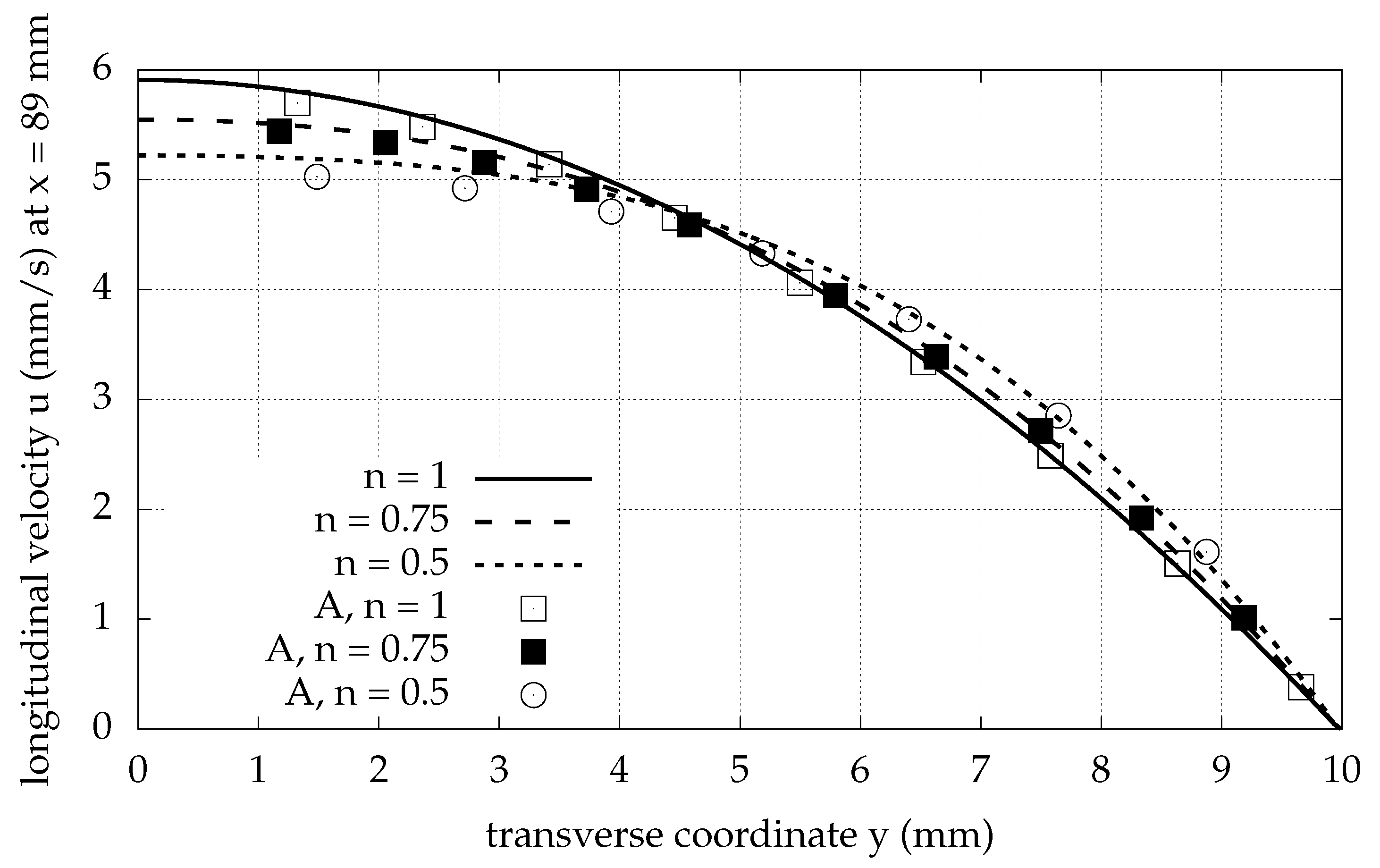
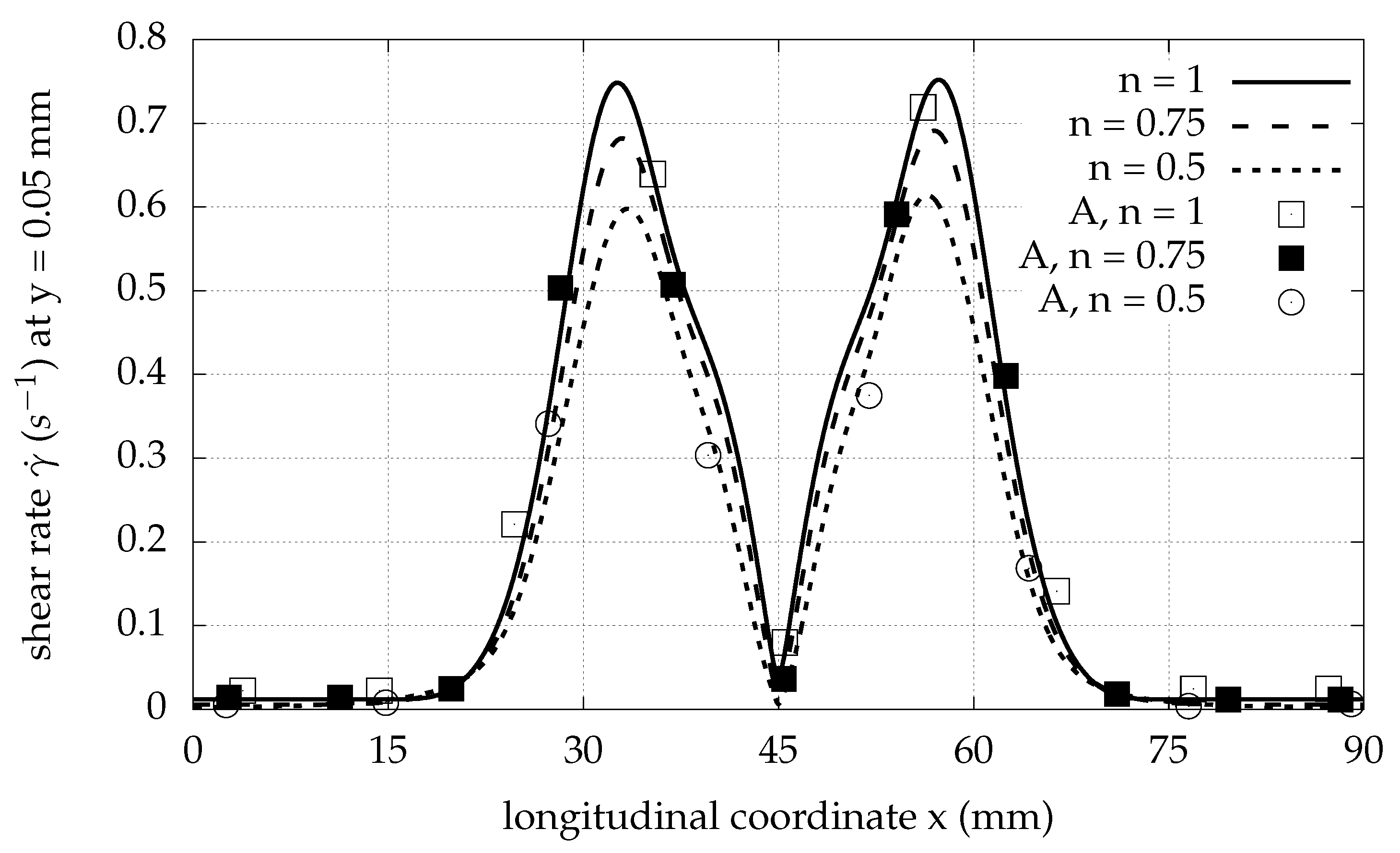
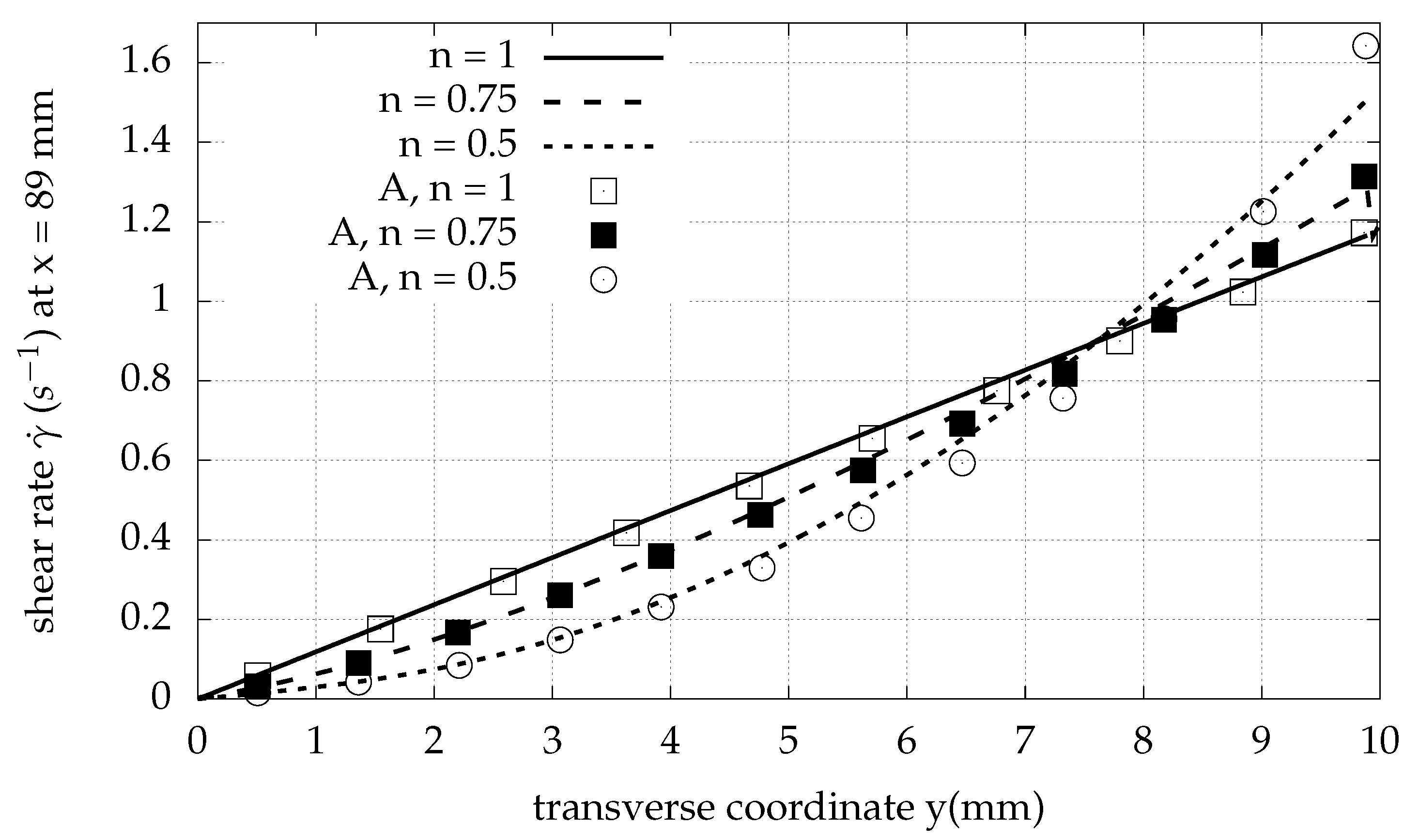
3.3. Non-Newtonian Fluids
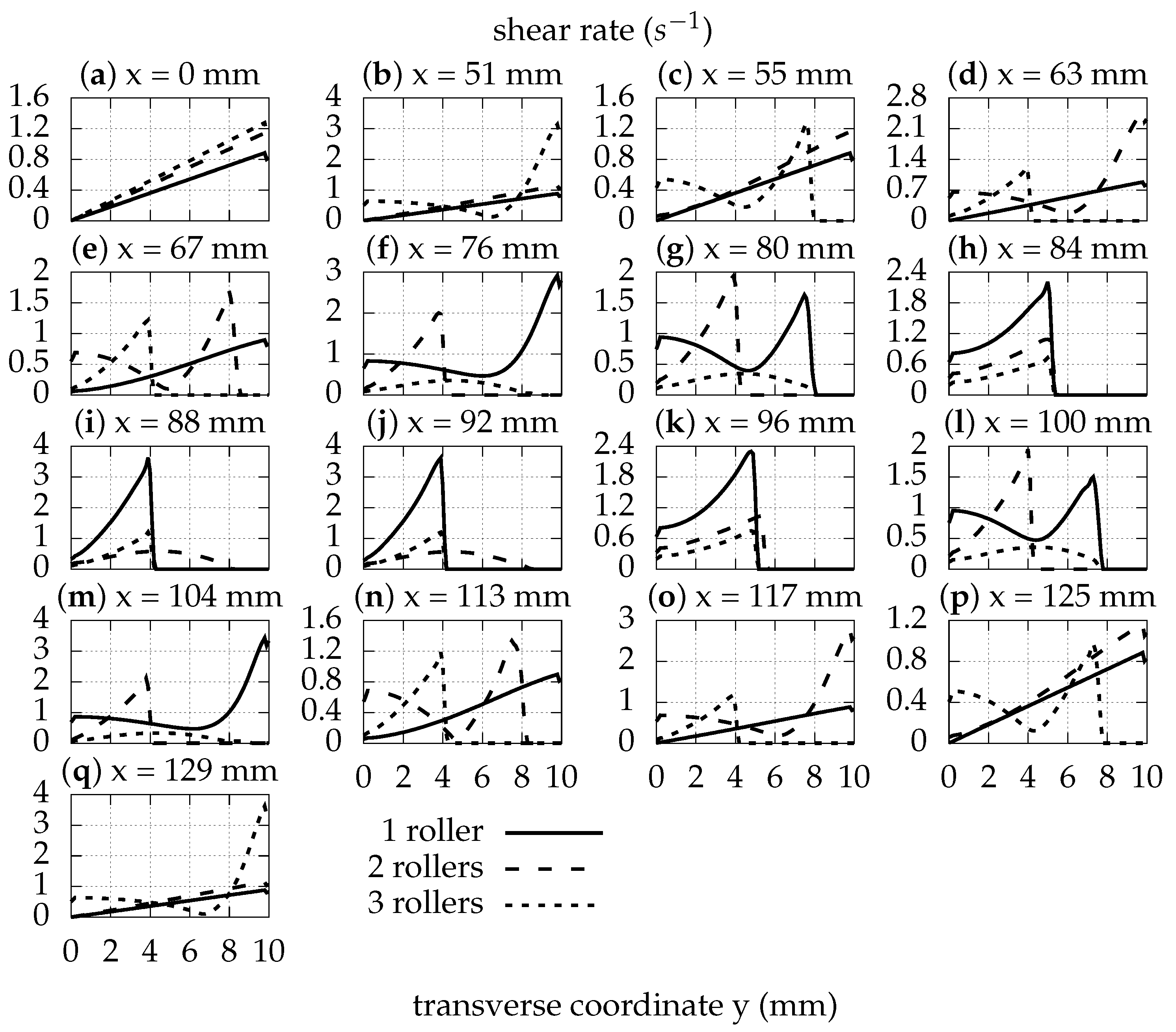
3.4. Multiple Rollers
3.5. Peristaltic Pump Characteristics
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Boron, W.F.; Boulpaep, E.L. Medical Physiology; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Gravlee, G.P.; Davis, R.F.; Hammon, J.; Kussman, B. Cardiopulmonary Bypass and Mechanical Support: Principles And Practice, 4th ed.; Wolters Kluwer-Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2015. [Google Scholar]
- Latham, T.W. Fluid Motion in a Peristaltic Pump. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1966. [Google Scholar]
- Jaffrin, M.Y.; Shapiro, A.H. Peristaltic Pumping. Annu. Rev. Fluid Mech. 1971, 3, 13–37. [Google Scholar] [CrossRef]
- Shapiro, A.H.; Jaffrin, M.Y.; Weinberg, S.L. Peristaltic pumping with long wavelengths at low Reynolds number. J. Fluid Mech. 1969, 37, 799–825. [Google Scholar] [CrossRef]
- Roy, R.; Rios, F.; Riahi, D. Mathematical Models for Flow of Chyme during Gastrointestinal Endoscopy. Appl. Math. 2011, 2, 600–607. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, L.M.; Srivastava, V.P. Peristaltic Transport of a non-Newtonian Fluid: Applications to Vas Deferens and Small Intestine. Ann. Biomed. Eng. 1985, 13, 137–153. [Google Scholar] [CrossRef] [PubMed]
- Weinberg, S.L.; Eckstein, E.C.; Shapiro, A.H. An experimental study of peristaltic pumping. J. Fluid Mech. 1971, 49, 461–479. [Google Scholar] [CrossRef]
- Nahar, S. Steady and Unsteady Flow Characteristics of Non-Newtonian Fluids in Deformed Elastic Tubes. Ph.D. Thesis, Swiss Federal Institute of Technology (ETH), Zürich, Switzerland, 2012. [Google Scholar]
- Tsui, Y.Y.; Guo, D.C.; Chen, S.H.; Lin, S.W. Pumping Flow in a Channel with a Peristaltic Wall. ASME J. Fluids Eng. 2013, 136, 1–9. [Google Scholar] [CrossRef]
- Tatsumi, K.; Matsunaga, Y.; Miwa, Y.; Nakabe, K. Numerical study on fluid-flow characteristics of peristaltic pump. Prog. Comput. Fluid Dyn. 2009, 9, 176–182. [Google Scholar] [CrossRef]
- Al-Habahbeh, A.A. Simulations of Newtonian and Non-Newtonian Flows in Deformable Tubes. Ph.D. Thesis, Michigan Technology University, Houghton, MI, USA, 2013. [Google Scholar]
- Alokaily, S.; Feigl, K.; Tanner, F.X.; Windhab, E.J. Numerical Simulations of the Transport of Newtonian and Non-newtonian Fluids via Peristaltic Motion. Appl. Rheol. 2018, 28, 1–15. [Google Scholar]
- Zhou, X.; Liang, X.; Zhao, G.; Su, Y.; Wang, Y. A New Computational Fluid Dynamics Method for In-Depth Investigation of Flow Dynamics in Roller Pump Systems. Artif. Organs 2014, 38, 106–117. [Google Scholar] [CrossRef] [PubMed]
- Manopoulos, C.; Savva, G.; Tsoukalis, A.; Vasileiou, G.; Rogkas, N.; Spitas, V.; Tsangaris, S. Optimal Design in Roller Pump System Applications for Linear Infusion. Computation 2020, 8, 35. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow patterns around heart valves: A numerical method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Sotiropoulos, F.; Yang, X. Immersed boundary methods for simulating fluid–structure interaction. Prog. Aerosp. Sci. 2014, 65, 1–21. [Google Scholar] [CrossRef]
- Ge, L.; Sotiropoulos, F. A numerical method for solving the 3D unsteady incompressible Navier—Stokes equations in curvilinear domains with complex immersed boundaries. J. Comput. Phys. 2007, 225, 1782–1809. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rivlin, R.S.; Ericksen, J.L. Stress-Deformation Relations for Isotropic Materials. J. Ration. Mech. Anal. 1955, 4, 323–425. [Google Scholar] [CrossRef]
- Nahar, S.; Jeelani, S.A.K.; Windhab, E.J. Steady and Unsteady Flow Characteristics of non-Newtonian Fluids in Deformed Elastic Tubes. In Proceedings of the 7th International Symposium on Ultrasonic Doppler Methods for Fluid Mechanics and Fluid Engineering, Gothenburg, Sweden, 7–9 April 2010; Wiklund, J., Levenstam Bragd, E., Manneville, S., Eds.; Chalmers University of Technology: Gothenburg, Sweden, 2010; pp. 61–64. [Google Scholar]
- Carreau, P.J. Rheological Equations from Molecular Network Theories. Ph.D. Thesis, University of Winsconsin, Madison, WI, USA, 1968. [Google Scholar]
- Bird, R.; Armstrong, R.; Hassager, O. Dynamics of Polymeric Liquids, Volume 1: Fluid Mechanics, 2nd ed.; Wiley: Hoboken, NJ, USA, 1987. [Google Scholar]
- Harlow, F.H.; Welch, J.E. Numerical Calculation of Time-Dependent Viscous Incompressible Flow of Fluid with Free Surface. Phys. Fluids 1965, 8, 2182–2189. [Google Scholar] [CrossRef]
- Gilmanov, A.; Sotiropoulos, F. A hybrid Cartesian/immersed boundary method for simulating flows with 3D, geometrically complex, moving bodies. J. Comput. Phys. 2005, 207, 457–492. [Google Scholar] [CrossRef]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; Series on Computational Methods in Mechanics and Thermal Science; Hemisphere Publishing Corporation: Oxfordshire, UK, 1980. [Google Scholar]
- Kang, S.; Sotiropoulos, F. Numerical modeling of 3D turbulent free surface flow in natural waterways. Adv. Water Resour. 2012, 40, 23–36. [Google Scholar] [CrossRef]
- Crank, J.; Nicholson, P. A practical method for numerical evaluation of solutions of partial differential equations of the heat-conduction type. Math. Proc. Camb. Philos. Soc. 1947, 43, 50–67. [Google Scholar] [CrossRef]
- Chorin, A.J. A numerical method for solving incompressible viscous flow problems. J. Comput. Phys. 1967, 2, 12–26. [Google Scholar] [CrossRef]
- Ferziger, J.H.; Perić, M. Computational Methods for Fluid Dynamics, 2nd ed.; Springer: Berlin, Germany, 1999. [Google Scholar]
- VFS-WIND Virtual Flow Simulator. Available online: https://safl-cfd-lab.github.io/VFS-Wind/ (accessed on 10 January 2021).
- Chen, G.; Xiong, Q.; Morris, P.J.; Paterson, E.G.; Sergeev, A.; Wang, Y.C. OpenFOAM for computational fluid dynamics. Not. Am. Math. Soc. 2014, 61, 354–363. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| , | mm/s, | mm/s, | mm/s, | ||||||
|---|---|---|---|---|---|---|---|---|---|
| c(mm/s) | TE(%) | RO | TE(%) | TE(%) [12] | RO | TE(%) | n | TE(%) | TE(%) [12] |
| 2.5 | 78.8 | 0.8 | 95.6 | 95 | 0.6 | 78.8 | 1 | 78.4 | 78 |
| 5 | 78.4 | 0.6 | 78.4 | 78 | 0.2 | 28.6 | 0.75 | 77.5 | 77 |
| 10 | 78.8 | 0.2 | 28.4 | 28 | 0.5 | 77.1 | 76 | ||
| Number of Rollers | 1 | 2 | 3 |
|---|---|---|---|
| TE (%) | 60 | 78 | 87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moulinos, I.; Manopoulos, C.; Tsangaris, S. A Computational Analysis for Active Flow and Pressure Control Using Moving Roller Peristalsis. Computation 2021, 9, 144. https://doi.org/10.3390/computation9120144
Moulinos I, Manopoulos C, Tsangaris S. A Computational Analysis for Active Flow and Pressure Control Using Moving Roller Peristalsis. Computation. 2021; 9(12):144. https://doi.org/10.3390/computation9120144
Chicago/Turabian StyleMoulinos, Iosif, Christos Manopoulos, and Sokrates Tsangaris. 2021. "A Computational Analysis for Active Flow and Pressure Control Using Moving Roller Peristalsis" Computation 9, no. 12: 144. https://doi.org/10.3390/computation9120144
APA StyleMoulinos, I., Manopoulos, C., & Tsangaris, S. (2021). A Computational Analysis for Active Flow and Pressure Control Using Moving Roller Peristalsis. Computation, 9(12), 144. https://doi.org/10.3390/computation9120144