
Nonuniformity of Isometric Properties of Automotive Driveshafts



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. State of the Art
- -
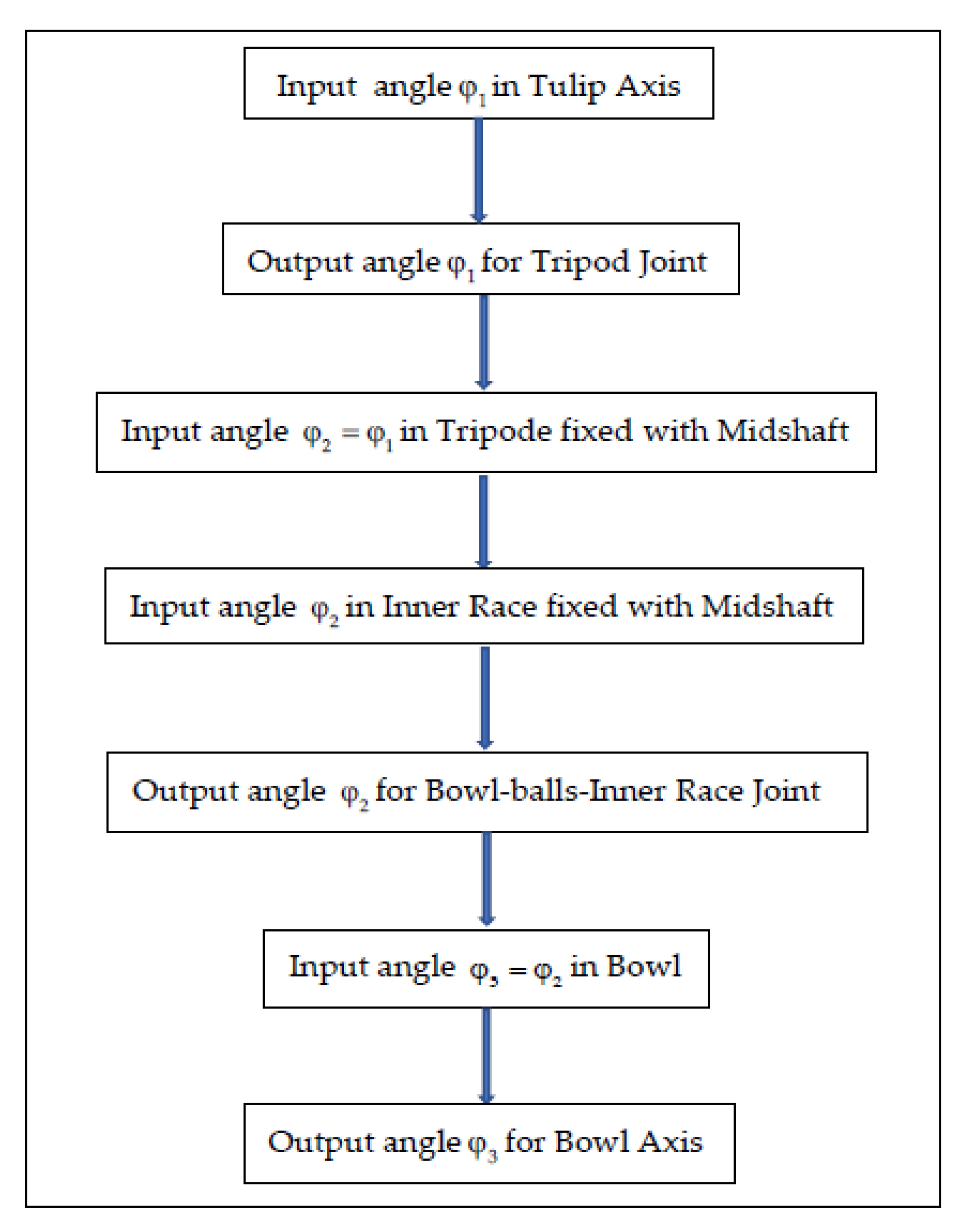
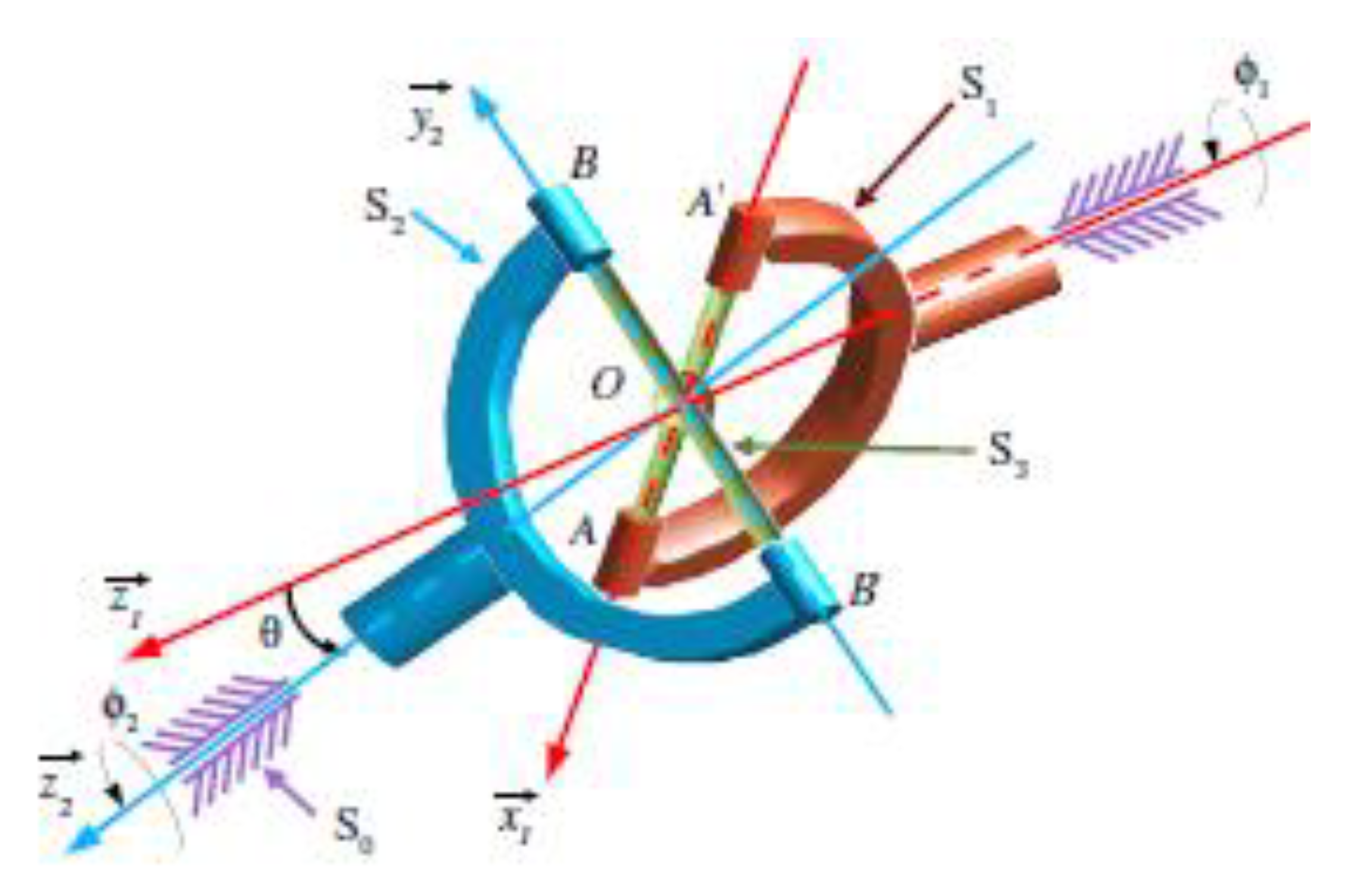
- Rotation with the angle φ1 of the tulip with respect to the X1, φ1 = 0 … n1π;
- -
- Rotation with the angle φ2 of the midshaft with respect to the X2, φ2 = 0 … n1π;
- -
- Rotation with the angle φ3 of the bowl with respect to the X3, φ3 = 0 … n1π;
- -
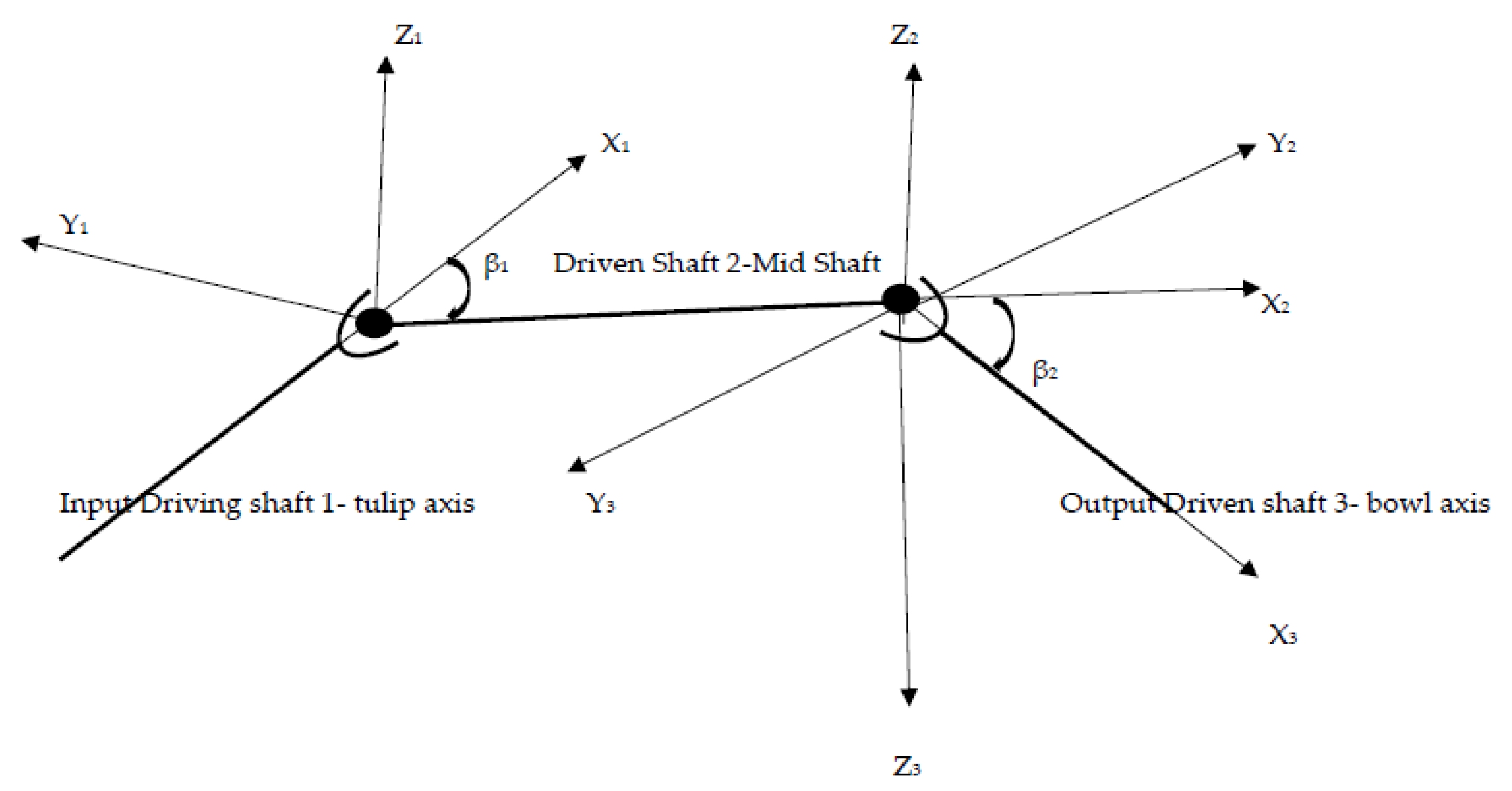
- Relative rotation of the longitudinal axe of the midshaft (given by the direction of the axis X2) with respect to the longitudinal direction of the tulip (given by the direction of the axis X1), with β1 (spatial angle between axis X1 and X2) with respect to the axis Z1, β1 being the angle between longitudinal direction of the tulip and the longitudinal direction of the midshaft, β1 = 0° … 15°;
- -
- Relative rotation of the longitudinal axis of the bowl (given by the direction of the axis X3) with respect to the longitudinal direction of the midshaft (given by the direction of the axis X2), with β2 (spatial angle between axis X2 and X3) with respect to the axis Y2, β2 being the angle between the longitudinal direction of the midshaft and the longitudinal direction of the bowl, β1 = 0° … 47°.
3. Proving the Constant Velocity of the Bowl-Balls Joint
- for the bowl-balls joint considering all the balls 1–3–5 like a tripode joint:
- -
- for the first transmitting ball element: Ψ1 = 0°:
- -
- for the third transmitting ball element: Ψ3 = 120°:
- -
- for the fifth transmitting ball element Ψ5 = 240°:Equations (12)–(14) are identical to those of the tripode joint therefore it is obtained
- for the bowl-balls joint considering all the balls 2-4-6 like a tripode joint:
- -
- for the second transmitting ball element Ψ2 = 60°:
- -
- for the fourth transmitting ball element Ψ4 = 180°:
- -
- for the sixth transmitting ball element Ψ6 = 300°:
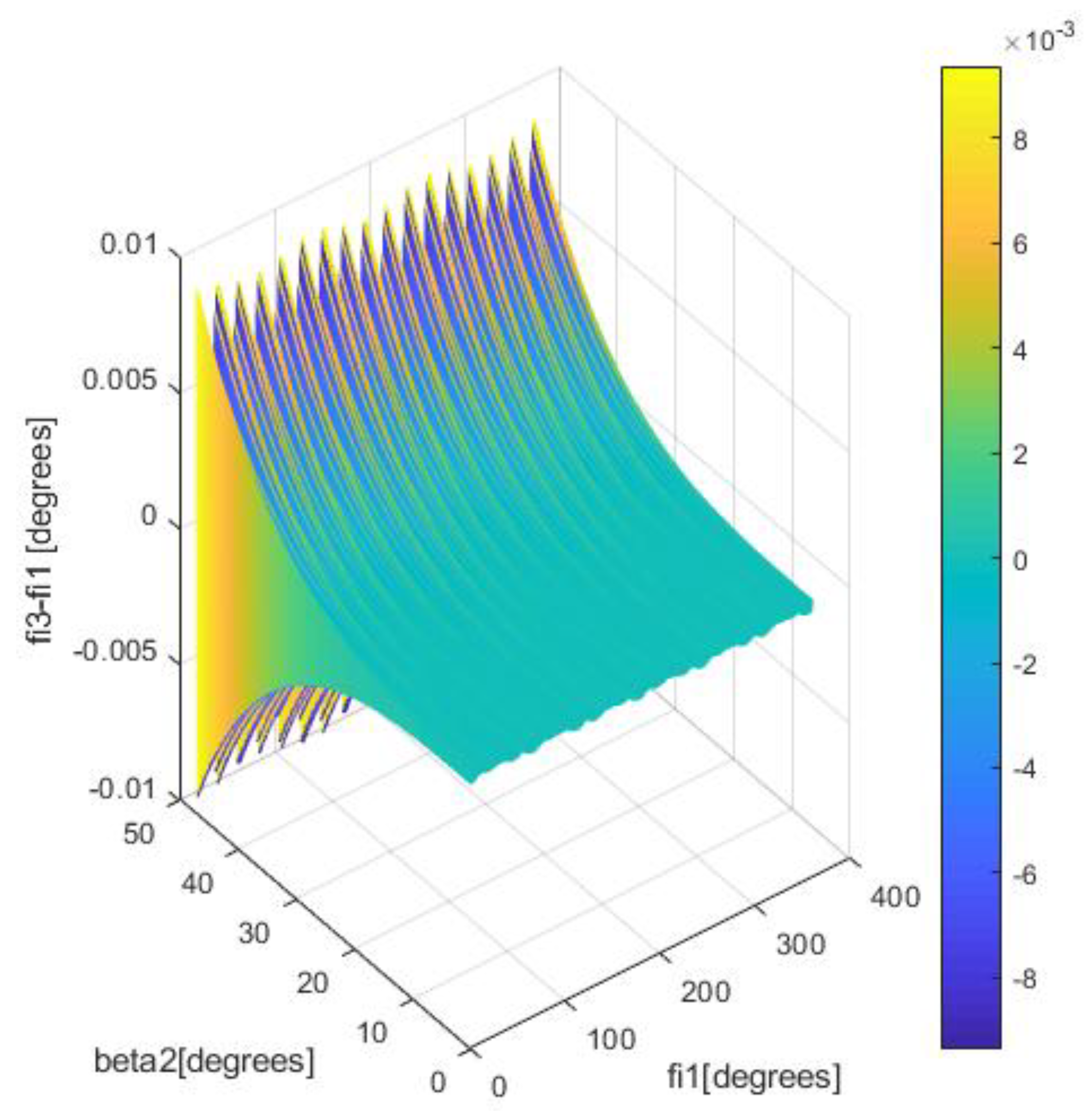
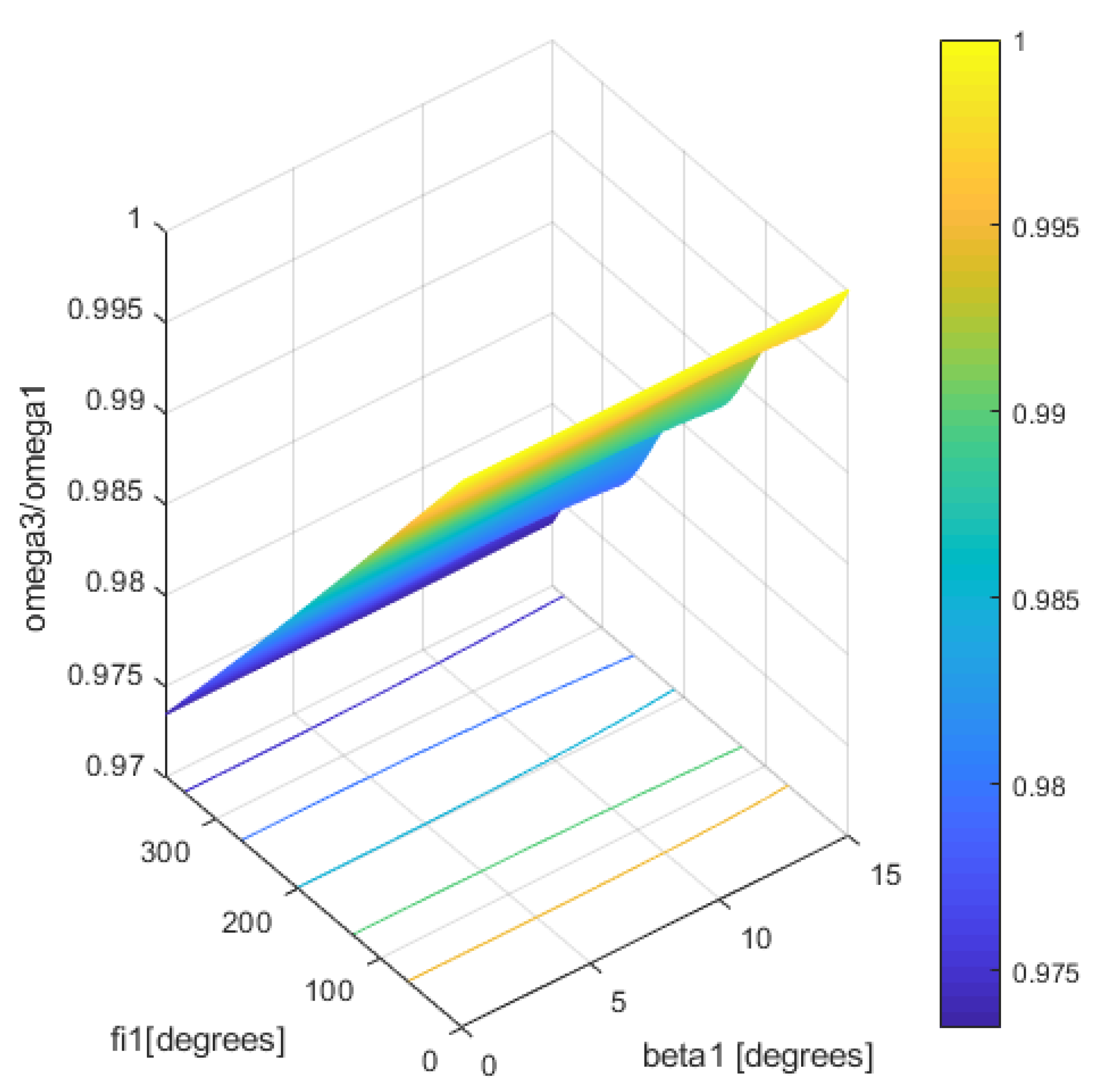
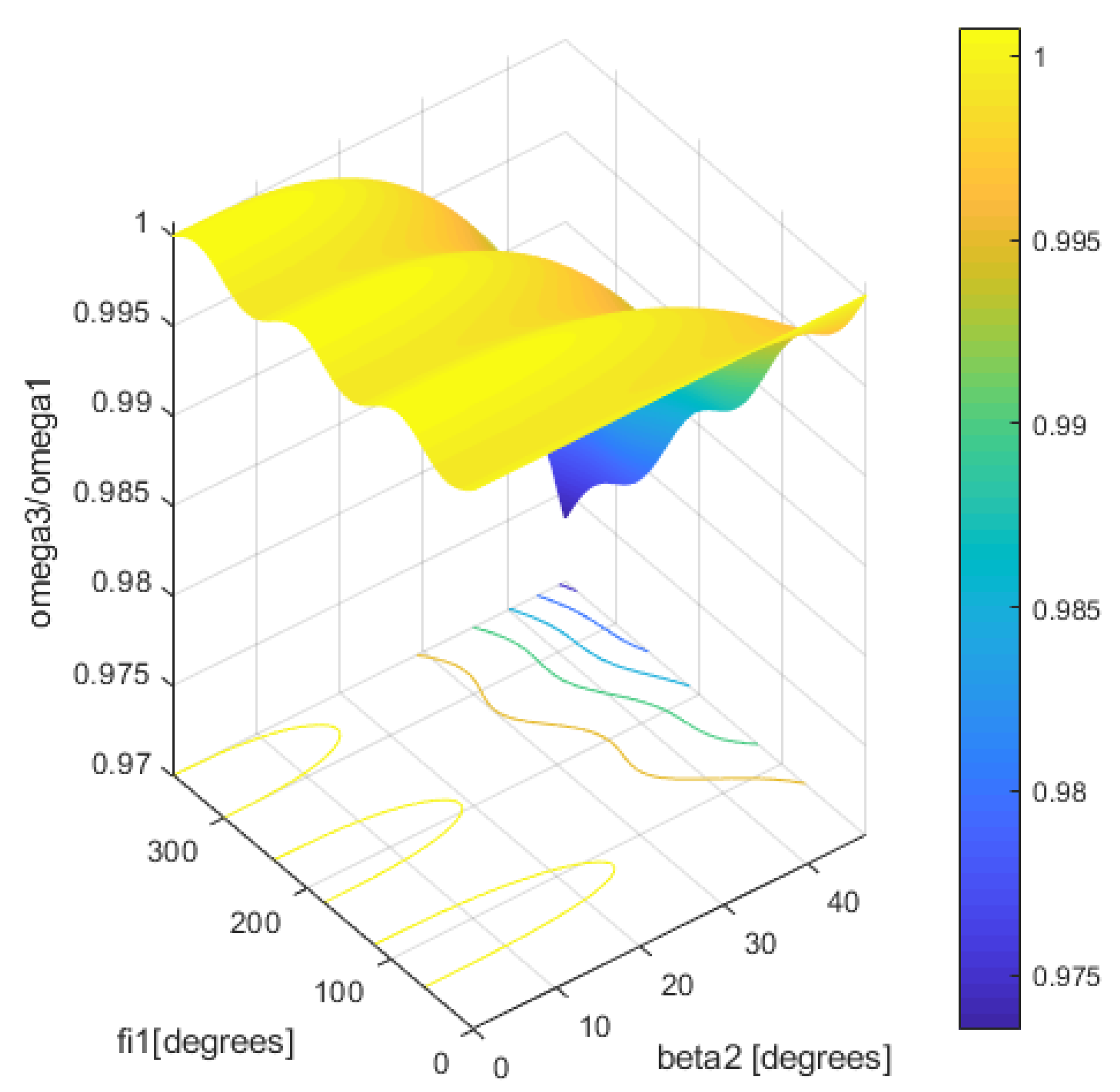
4. Nonuniformity of Geometric vs. Kinematic Isometry of Driveshafts and Discussions
- -
- for the tulip–tripode joint:
- -
- for the bowl-balls joint:where r1 is the tulip radius, r2 is the bowl radius, and l is the length of the midshaft. After injecting the Relation (20) in (21) yields:And the dependance of the angular speed of the bowl with respect to the angular speed of the tulip is:
- -
- primary resonance for excitation frequency, [21] (p. 196);
- -
- super harmonic resonance for excitation frequency, , k1 positive integer [21] (p. 211);
- -
- subharmonic resonance for excitation frequency, k1 positive integer [21] (p. 214);
- -
- principal parametric resonance for excitation frequency, [21] (p. 425);
- -
- combination resonances for excitation frequencies, [21] (pp. 202, 430);
- -
- simultaneous resonances for excitation frequencies, , with k positive integer [21] (p. 188);
- -
- internal resonances for with k1 and k2, positive integers [21] (p. 381).
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Seherr-Thoss, H.C.; Schmelz, F.; Aucktor, E. Theory of Constant Velocity Joints (CVJ). In Universal Joints and Driveshafts, 2nd ed.; Springer: Berlin, Germany, 2006; pp. 53–80. [Google Scholar]
- Patent Rzeppa. Available online: https://worldwide.espacenet.com/patent/search/family/008989560/publication/FR628309A?q=pn%3DFR628309A (accessed on 3 March 2020).
- Glaenzer-Spicer. Tripod Joint GI. European Patent No. 1.272.530, 4 July 1960. [Google Scholar]
- Schmelz, F.; Seherr-Thoss, H.C. Die Entwicklung der Gleichlaufgelenke fur den Frontantrieb; VDI-Report No. 418; VDI: Ingolstadt, Germany, 1981. [Google Scholar]
- Duditza, F.; Diaconescu, D. Zur Kinematik und Dynamik von Tripode-Gelenkgetrieben. Konstruction 1975, 27, 335–341. [Google Scholar]
- Shao, K.; Zheng, J.; Huang, K.; Qiu, M.; Sun, Z. Robust model referenced control for vehicle rollover prevention with time-varying speed. Int. J. Veh. Des. 2021, 85, 48–68. Available online: https://www.inderscienceonline.com/doi/abs/10.1504/IJVD.2021.117154 (accessed on 7 December 2021). [CrossRef]
- Deng, B.; Zhao, H.; Shao, K.; Li, W.; Yin, A. Hierarchical Synchronization Control Strategy of Active Rear Axle Independent Steering System. Appl. Sci. 2020, 10, 3537. [Google Scholar] [CrossRef]
- Tiberiu-Petrescu, F.I.T.; Petrescu, R.V.V. The structure, geometry, and kinematics of a universal joint. Indep. J. Man ana Prod. 2019, 10, 1713–1724. [Google Scholar] [CrossRef]
- Ertürka, A.T.; Karabayb, S.; Baynalc, K.; Korkutd, T. Vibration Noise Harshness of a Light Truck Driveshaft, Analysis and Improvement with Six Sigma Approach. ACTA Phys. Pol. A 2017, 131, 477–480. [Google Scholar] [CrossRef]
- Kamalakkannan, B. Modelling and Simulation of Vehicle Kinematics and Dynamics. Master’s Thesis, Halmstad University, Halmstad, Sweden, 13 January 2017. [Google Scholar]
- Kishore, M.; Keerthi, J.; Kumar, V. Design and Analysis of Drive Shaft of an Automobile. Int. J. Eng. Trends Technol. 2016, 38, 291–296. [Google Scholar] [CrossRef]
- Mazzei, A.J.; Scott, R.A. Principal Parametric Resonance Zones of a Rotating Rigid Shaft Driven through a Universal Joint. J. Sound Vib. 2001, 244, 555–562. [Google Scholar] [CrossRef][Green Version]
- Browne, M.; Palazzolo, A. Super harmonic nonlinear lateral vibrations of a segmented driveline incorporating a tuned damper excited by a non-constant velocity joints. J. Sound Vib. 2008, 323, 334–351. [Google Scholar] [CrossRef]
- Steinwede, J. Design of a Homokinetic Joint for Use in Bent Axis Axial Piston Motors. Ph.D. Thesis, Aachen University, Aachen, Germany, 25 November 2020. Available online: https://www.google.com/search?client=firefox-b-d&q=%E2%80%9DDESIGN+OF+A+HOMOKINETIC+JOINT+FOR+USE+IN+BENT+AXIS+AXIAL+PISTON+MOTORS%E2%80%9D+J.+Steinwede+ (accessed on 7 December 2021).
- Feng, H.; Rakheja, S.; Shangguan, W.B. Analysis and optimization for generated axial force of a driveshaft system with interval of uncertainty. Struct. Multidiscip. Optim. 2021, 63, 197–210. [Google Scholar] [CrossRef]
- Orain, M. Die Gleichlaufgelenke, Allgemeine Theorie und Experimenteller Forschung; Glaenzer-Spicer: Paris, France, 1976. [Google Scholar]
- Patent. Drive Shaft Tube and End Fitting Assembly and Method of Manufacturing Same. EP0685659A1, 1995. Available online: https://patents.google.com/patent/EP0685659A1 (accessed on 7 December 2021).
- Patent. Vehicle Driveshaft. U.S. Patent 006279221 B1, 2001. Available online: https://www.google.com/search?q=USOO6279221B1&client=firefox-b-d&sxsrf=AOaemvJib3LZ507AlCWlPBANx4VUsa9-Iw%3A1639040235249&ei=68SxYZH-De-C9u8Pq5-m-A4&ved=0ahUKEwjRn_nXrNb0AhVvgf0HHauPCe8Q4dUDCA0&uact=5&oq=USOO6279221B1&gs_lcp=Cgdnd3Mtd2l6EAM6BwgAEEcQsANKBAhBGABKBAhGGABQ5wlY5wlgrhdoAXACeACAAXaIAXaSAQMwLjGYAQCgAQKgAQHIAQjAAQE&sclient=gws-wiz (accessed on 7 December 2021).
- Patent. Hybrid Driveshaft Based on Unidirectional and Fabric Composite Materials. U.S. Patent 20080045348 A1, 2008. Available online: https://patents.google.com/patent/US20080045348 (accessed on 7 December 2021).
- Patent. Method of Manufacturing an Axially Collapsible Driveshaft Assembly. U.S. Patent 7080437 B2, 2006. Available online: https://patents.google.com/patent/US7080437 (accessed on 7 December 2021).
- Nayfeh, A.H.; Mook, D.T. Nonlinear Oscillations; John Wiley & Sons: New York, NY, USA, 1979. [Google Scholar]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bugaru, M.; Vasile, A. Nonuniformity of Isometric Properties of Automotive Driveshafts. Computation 2021, 9, 145. https://doi.org/10.3390/computation9120145
Bugaru M, Vasile A. Nonuniformity of Isometric Properties of Automotive Driveshafts. Computation. 2021; 9(12):145. https://doi.org/10.3390/computation9120145
Chicago/Turabian StyleBugaru, Mihai, and Andrei Vasile. 2021. "Nonuniformity of Isometric Properties of Automotive Driveshafts" Computation 9, no. 12: 145. https://doi.org/10.3390/computation9120145
APA StyleBugaru, M., & Vasile, A. (2021). Nonuniformity of Isometric Properties of Automotive Driveshafts. Computation, 9(12), 145. https://doi.org/10.3390/computation9120145