
A Novel Mixed Finite/Infinite Dimensional Port–Hamiltonian Model of a Mechanical Ventilator

Abstract
1. Introduction
1.1. Mathematical Models of the Respiratory System
1.2. Related Works
1.3. Applications of Integrated Mechanical Ventilator–Human Lung System Models
1.4. Motivation of the Port–Hamiltonian Approach
- The Port–Hamiltonian approach is modular and is based on the topology of the mechanical ventilator and the human respiratory system. Thus, various types of mechanical ventilators and human respiratory systems with different structure/topologies can be simulated/tested numerically under various operating conditions to analyse performance, etc. [19,20].
2. Materials and Method
- is a DS;
- is an LS;
- a resistive relation.
- and are known as flows and efforts;
- and are known as resistive flows and efforts;
- and are known as external flows and efforts, respectively.
- 1.
- V is a set of vertices;
- 2.
- E is a set of edges;
- 3.
- maps each edge, e, to an initial vertex;
- 4.
- maps each edge, e, to a terminal vertex.
- 1.
- A subgraph is said to be an induced subgraph on if ;
- 2.
- A subgraph is said to be spanning if ;
- 3.
- A subgraph is said to be a proper subgraph if ;
- 4.
- If both V and E are finite, then is said to be finite.
- 1.
- An n-tuple is called a path from υ to ϖ if
- (a)
- are distinct;
- (b)
- for all ;
- (c)
- .
- 2.
- A path from υ to υ is called a cycle.
- 3.
- Two vertices, υ and ϖ are said to be connected if there exists a path from υ to ϖ.
- 4.
- The existence of paths from vertices gives an equivalence relation on the set of vertices.
- 5.
- A subgraph is a component of the graph.
- 6.
- A graph with only one component is said to be connected.
- Is finite;
- Is loop-free;
- Has an incidence matrix .
Dirac Structure
3. Detailed Port–Hamiltonian Model of a Mechanical Ventilator
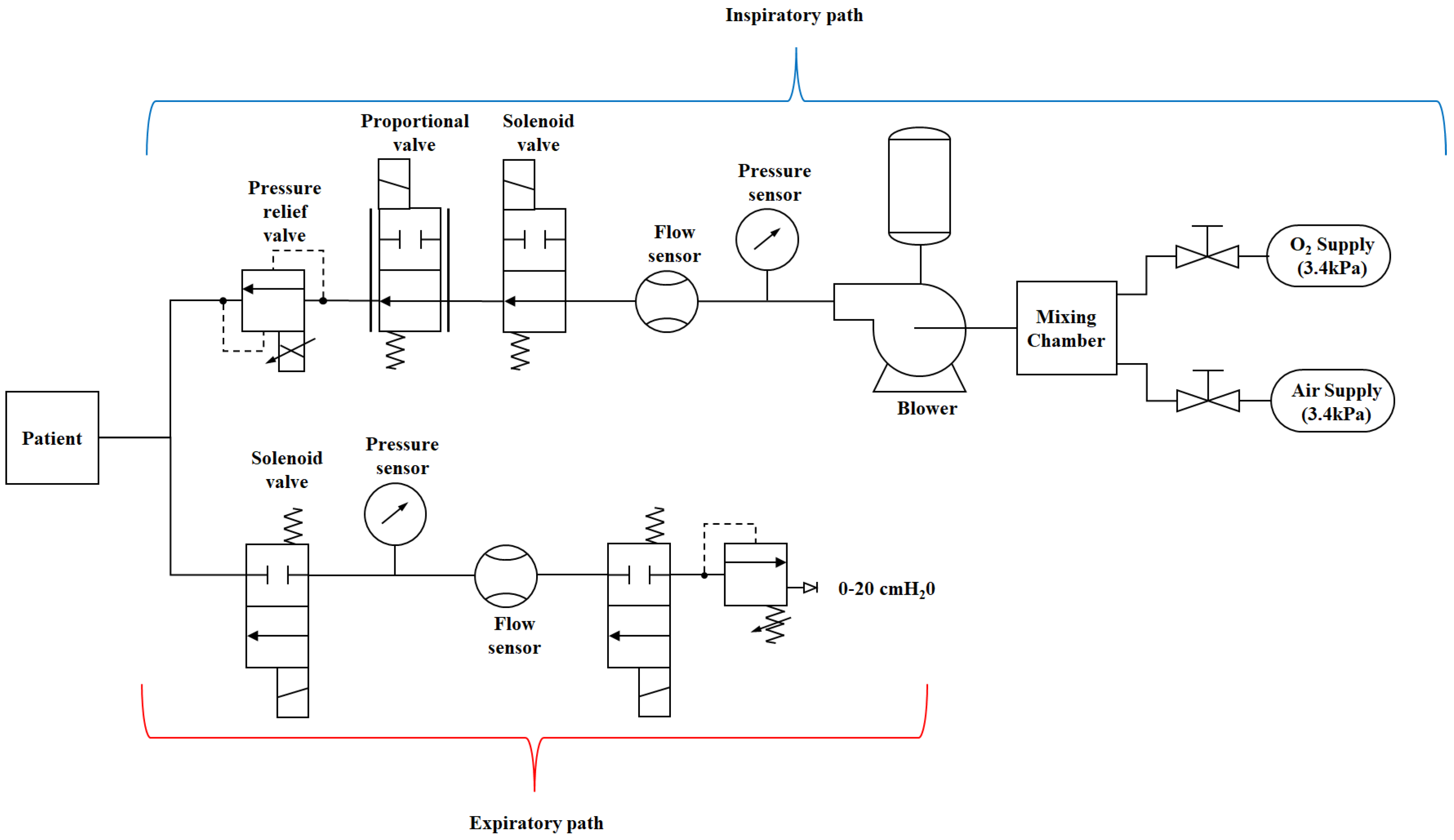
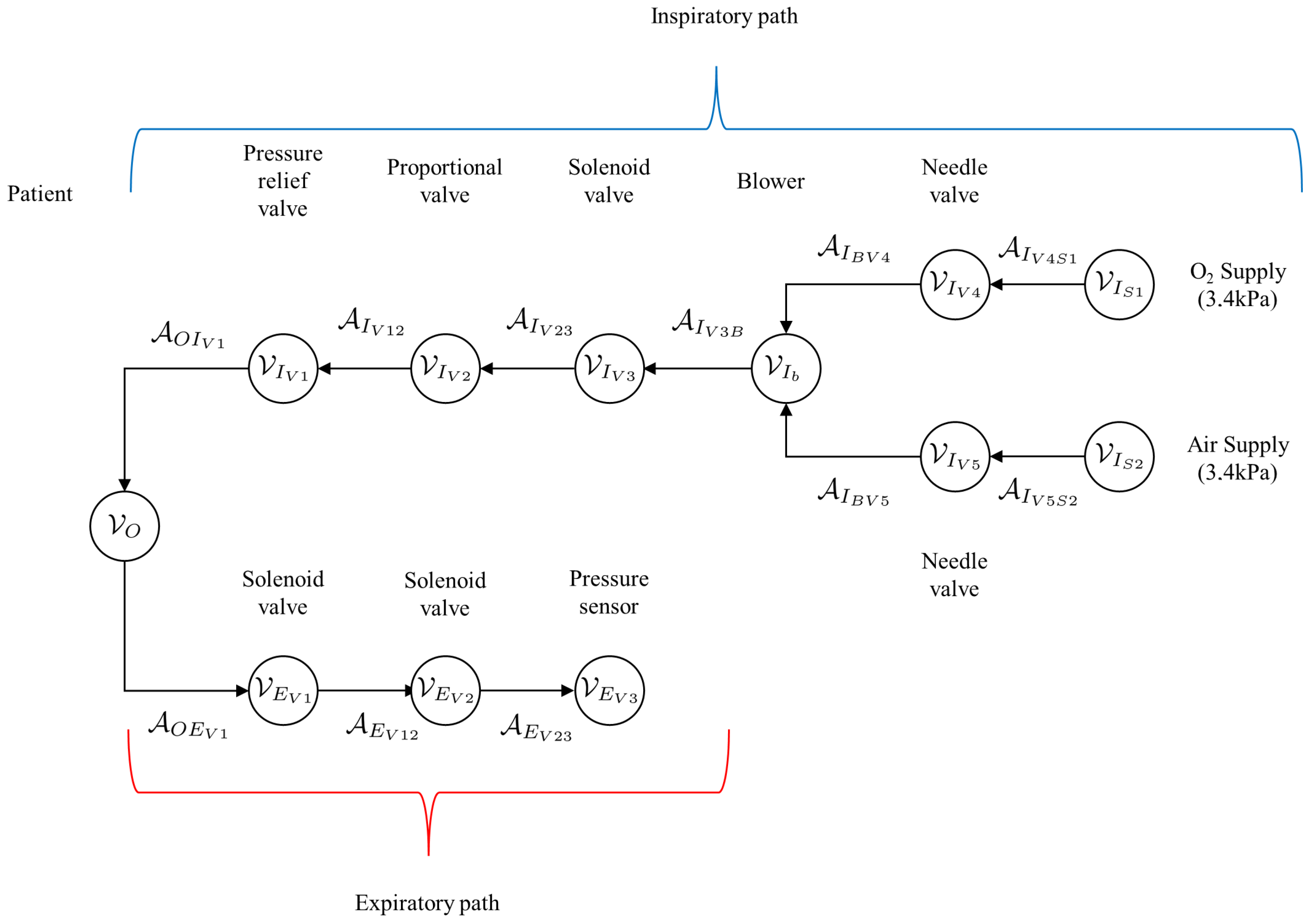
3.1. Description of the System
3.2. Blower Model
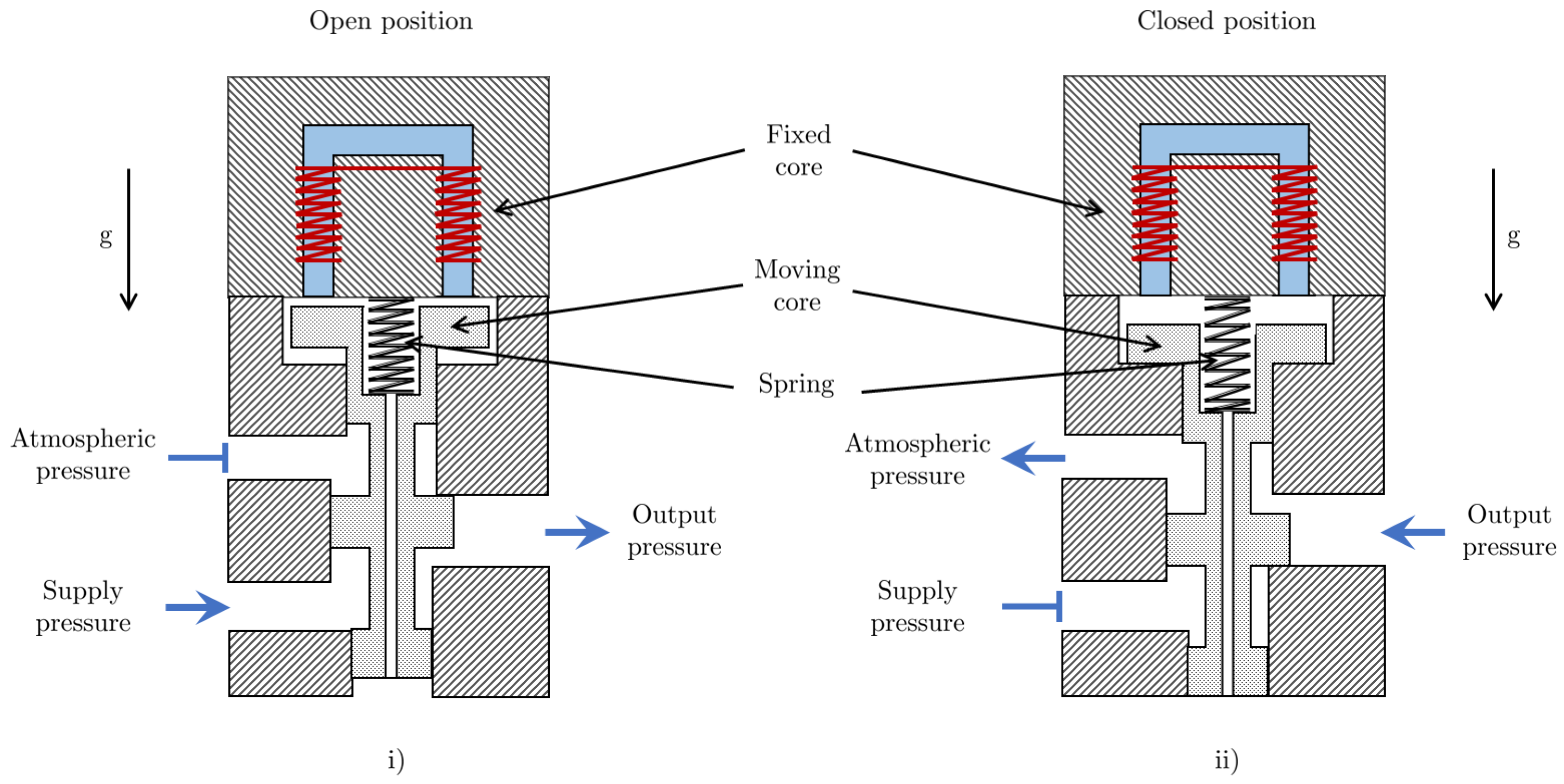
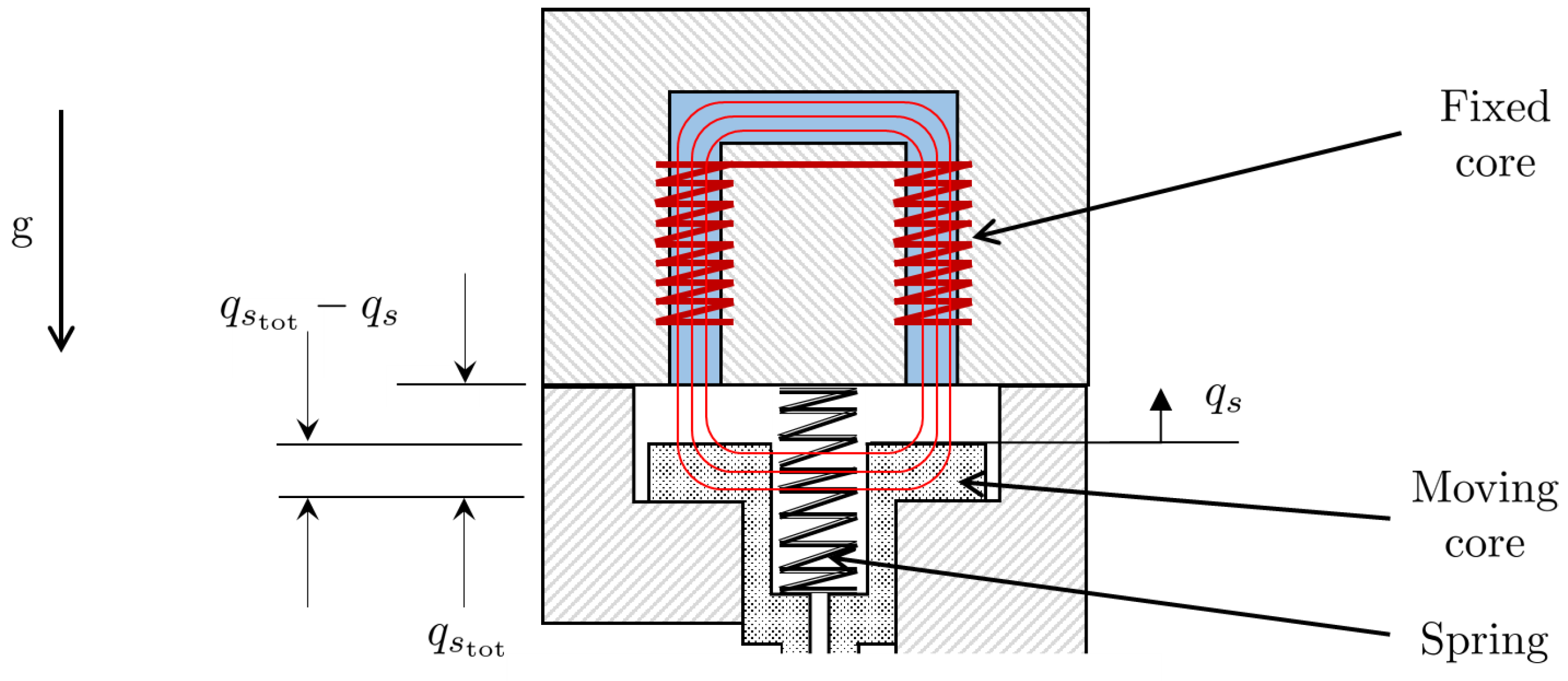
4. Solenoid Valve Subsystem
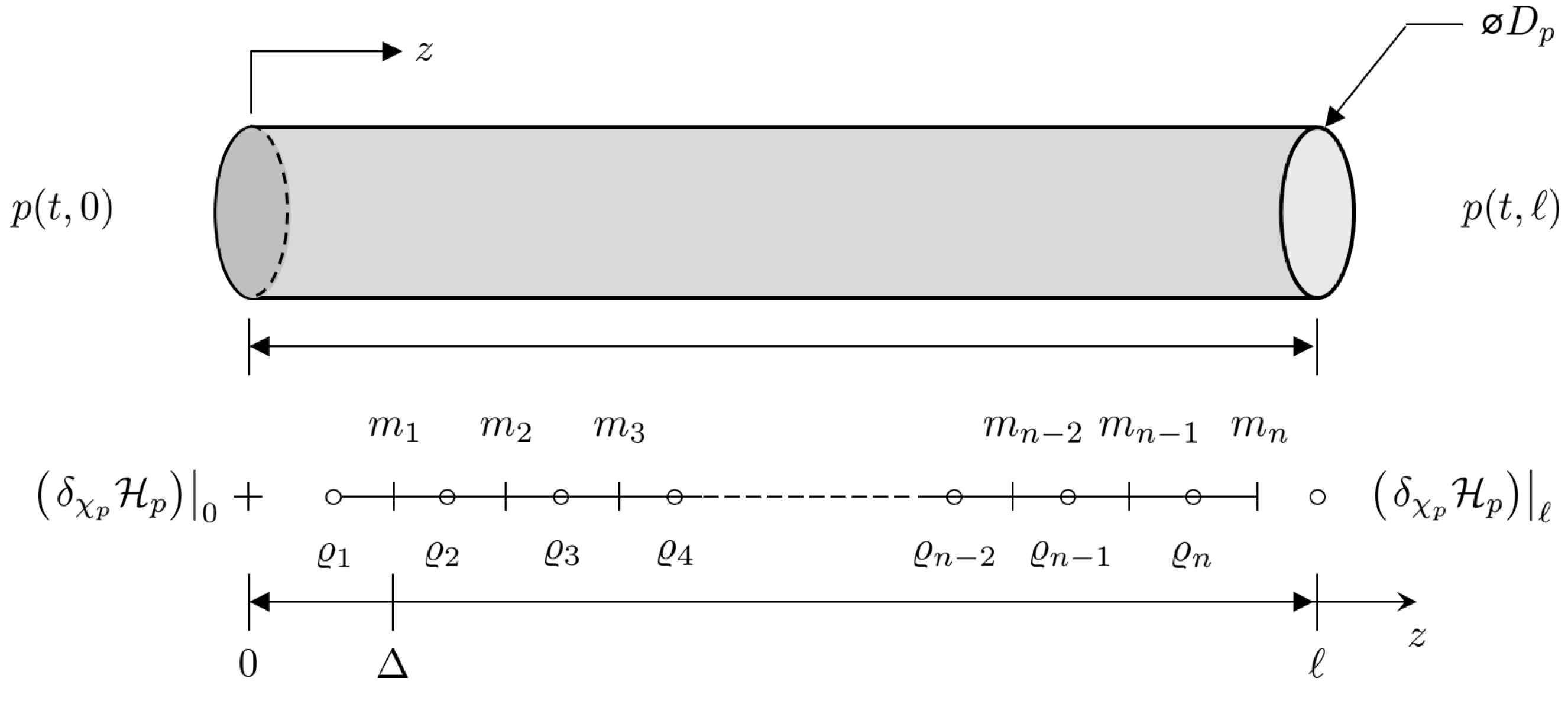
4.1. Pipe Model
- The pipe is taken as rigid (the cross-section does not expand as a result of fluid flow).
- Frictional and gravitational effects are neglected (this will be relaxed in future works in this research area).
- The model parameters of the gas remain constant along the pipe cross-section but vary in time along the pipe length. Thus, they can be averaged about the cross-section, and thus, the gas flow is one-dimensional.
- The temperatures of the pipe walls are assumed to be constant and equal to the ambient room temperature. Hence, temperature effects are ignored.
Port–Hamiltonian Formulation of Pipe-Flow Model
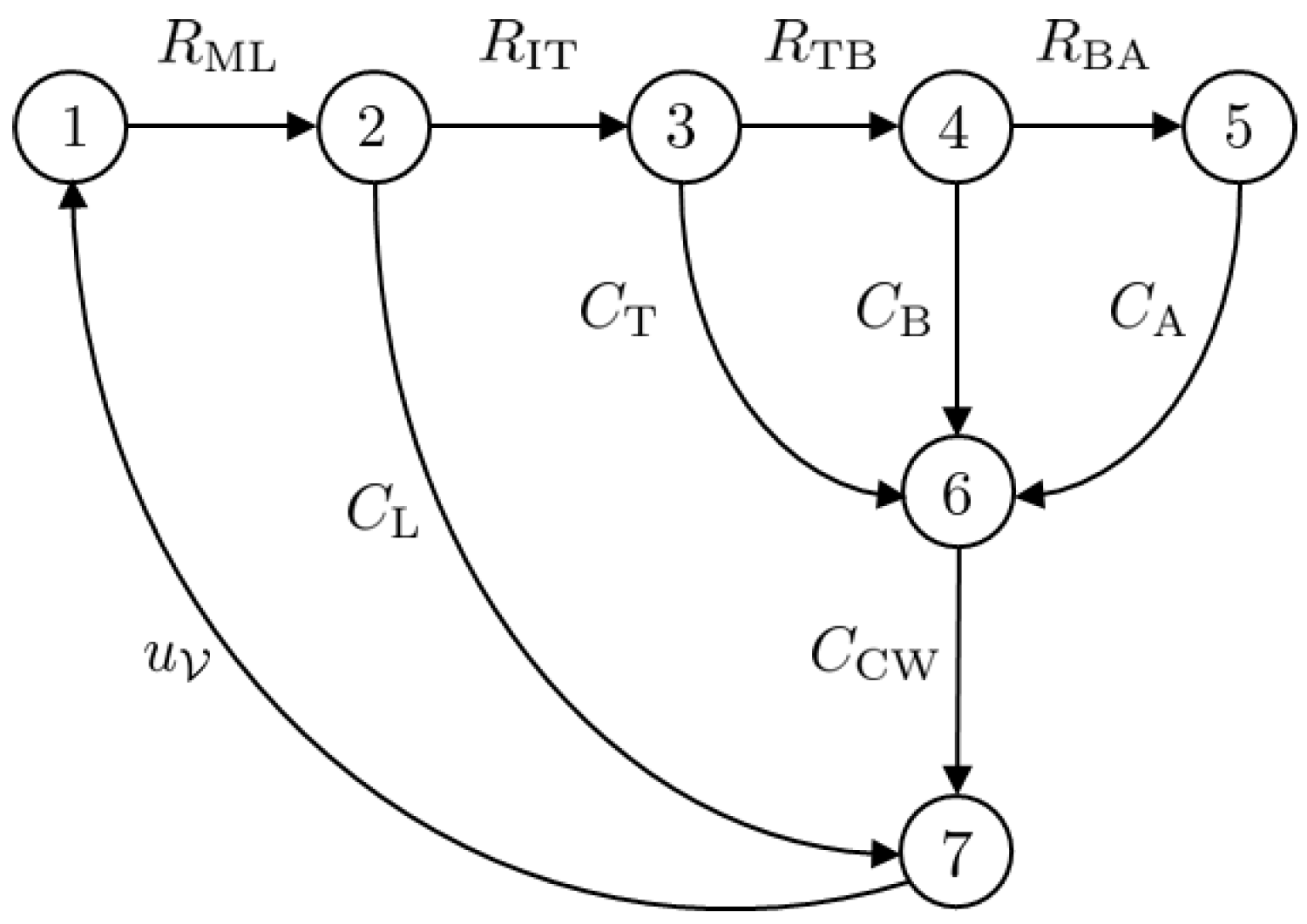
4.2. Electric Circuit Model of the Lung
5. Model Network Topology
6. Model Interconnection/Coupling Conditions
- Pump-to-pipe interconnection: The pressure and flow rate of the fluid exiting the pump, and , respectively, are equal to the pressure and flow rate at the inlet of the pipe, given by and , respectively. Thus,
- Pipe-to-valve interconnection: The pressure and flow rate of the fluid entering/exiting a valve, and , respectively, are equal to the pressure and flow rate at the inlet/outlet of the pipe, given by and for the inlet and and for the outlet. Thus,and
- Pipe-to-circuit interconnection: The pressure and fluid flow rate at the outlet of a pipe can act as inputs to a circuit model; thus,On the other hand, the output voltage and current of a circuit can be interconnected with a fluid pipe at the inlet of the pipe. In this case, the output voltage and or current of the circuit should be equal to the inlet pressure and inlet flow rate, respectively. This relation can expressed mathematically as:The Hamiltonian of the complete system is given by the sum of the Hamiltonian’s of the individual systems:The rate of change of the energy of the complete system isThe terms and are the external pressures and flow rates acting on the system. They should be equal to zero to complete the interconnection.
7. Structure-Preserving Discretization
8. Results and Discussion
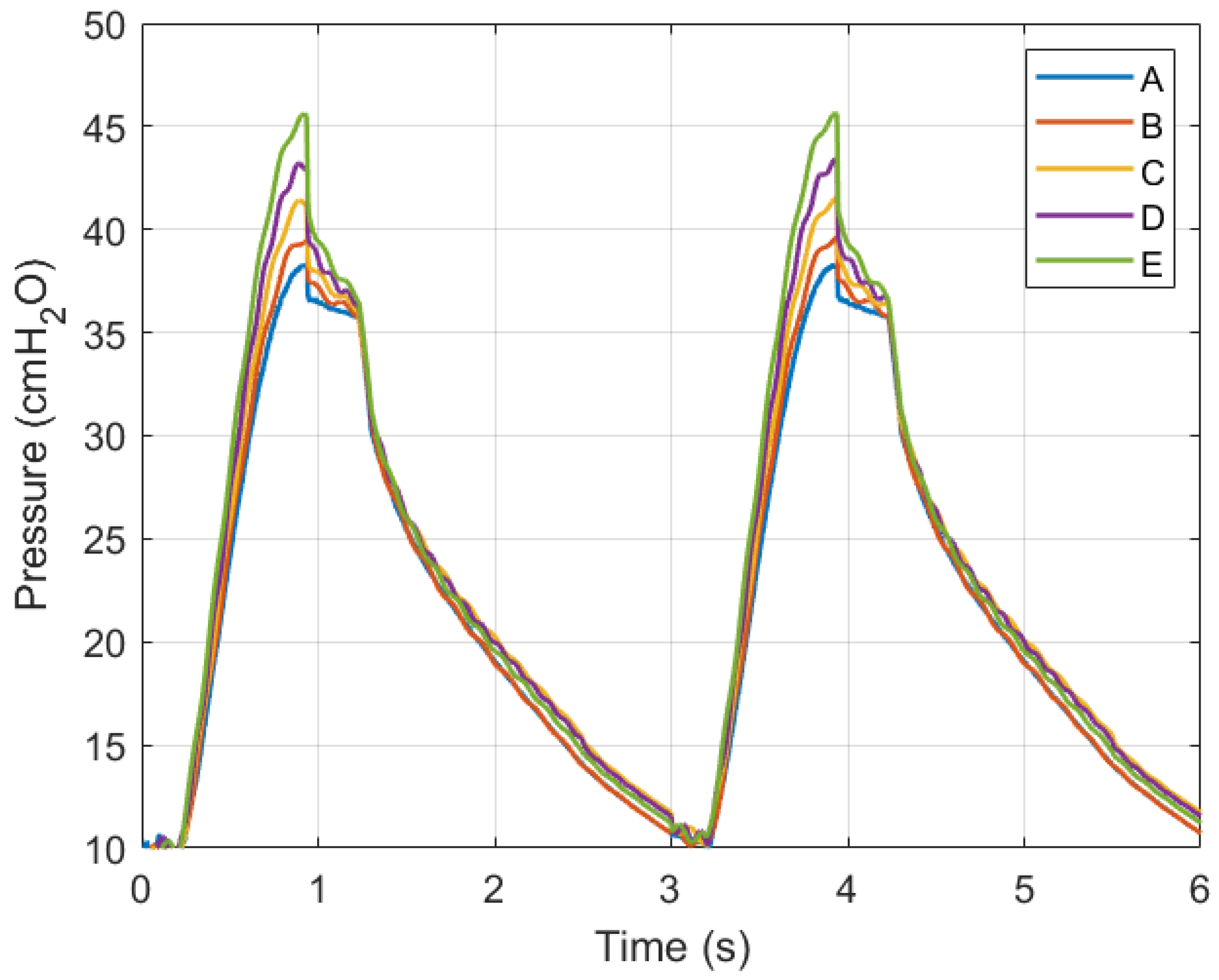
8.1. Model Validation
8.2. Simulation Environment
9. Conclusions and Recommendations
- Developing a software framework for the automatic generation of the Port–Hamiltonian dynamics for various mechanical ventilator and human respiratory system configurations as well as their associated integrated models [19];
- Development of various reduced-order models;
- Taking advantage of the modular and graph theoretic nature of the Port–Hamiltonian approach to incorporate machine learning and artificial intelligence [19];
- Investigation of the most appropriate structure-preserving discretizations and model-order reductions for various data-driven applications and control system designs.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Rubio, J.; Rojas, C.; Sanchez, M.; Gómez-Alzate, D.; Córdova, M.; Montoya, V.; Castaneda, B.; Chang, J.; Pérez-Buitrago, S. COVOX: Providing oxygen during the COVID-19 health emergency. HardwareX 2023, 13, e00383. [Google Scholar] [CrossRef]
- Hickling, K.G. The Pressure–Volume Curve Is Greatly Modified by Recruitment. Am. J. Respir. Crit. Care Med. 1998, 158, 194–202. [Google Scholar] [CrossRef]
- Bates, J.H.T. Lung Mechanics: An Inverse Modeling Approach; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Maury, B. The Respiratory System in Equations, 1st ed.; MS&A—Modeling, Simulation and Applications; Springer: Milan, Italy, 2013. [Google Scholar] [CrossRef]
- Burrowes, K.S.; Hunter, P.J.; Tawhai, M.H. Anatomically based finite element models of the human pulmonary arterial and venous trees including supernumerary vessels. J. Appl. Physiol. 2005, 99, 731–738. [Google Scholar] [CrossRef]
- Tawhai, M.H.; Bates, J.H.T. Multi-scale lung modeling. J. Appl. Physiol. 2011, 110, 1466–1472. [Google Scholar] [CrossRef]
- Berger, L.; Bordas, R.; Burrowes, K.; Brightling, C.; Hartley, R.; Kay, D. Understanding the Interdependence Between Parenchymal Deformation and Ventilation In Obstructive Lung Disease. In B30. Dynamics of Airway Narrowing in Asthma: Still Misunderstood? American Thoracic Society: New York, NY, USA, 2014; Volume 189, p. A2677. [Google Scholar]
- Roth, C.J.; Yoshihara, L.; Ismail, M.; Wall, W.A. Computational modelling of the respiratory system: Discussion of coupled modelling approaches and two recent extensions. Comput. Methods Appl. Mech. Eng. 2017, 314, 473–493. [Google Scholar] [CrossRef]
- Tran, A.S.; Thinh Ngo, H.Q.; Dong, V.K.; Vo, A.H. Design, Control, Modeling, and Simulation of Mechanical Ventilator for Respiratory Support. Math. Probl. Eng. 2021, 2021, 2499804. [Google Scholar] [CrossRef]
- El-Hadj, A.; Kezrane, M.; Ahmad, H.; Ameur, H.; Bin Abd Rahim, S.Z.; Younsi, A.; Abu-Zinadah, H. Design and simulation of mechanical ventilators. Chaos Solitons Fractals 2021, 150, 111169. [Google Scholar] [CrossRef]
- Tharion, J.; Kapil, S.; Muthu, N.; Tharion, J.; Subramani, K. Rapid Manufacturable Ventilator for Respiratory Emergencies of COVID-19 Disease. Trans. Indian Natl. Acad. Eng. 2020, 5, 373–378. [Google Scholar] [CrossRef]
- Pivik, W.J.; Clayton, G.M.; Jones, G.F.; Nataraj, C. Dynamic Modeling of a Low-cost Mechanical Ventilator. IFAC-PapersOnLine 2022, 55, 81–85. [Google Scholar] [CrossRef]
- Al-Naggar, N. Modelling and Simulation of Pressure Controlled Mechanical Ventilation System. J. Biomed. Sci. Eng. 2015, 8, 707–716. [Google Scholar] [CrossRef]
- Shi, Y.; Ren, S.; Cai, M.; Xu, W. Modelling and Simulation of Volume Controlled Mechanical Ventilation System. Math. Probl. Eng. 2014, 2014, 271053. [Google Scholar] [CrossRef]
- Al-Naggar, N.Q.; Al-Hetari, H.Y.; Al-Akwaa, F.M. Simulation of Mathematical Model for Lung and Mechanical Ventilation. J. Sci. Technol. 2016, 21, 1–9. [Google Scholar] [CrossRef]
- Giri, J.; Kshirsagar, N.; Wanjari, A. Design and simulation of AI-based low-cost mechanical ventilator: An approach. Mater. Today Proc. 2021, 47, 5886–5891. [Google Scholar] [CrossRef]
- Hannon, D.M.; Mistry, S.; Das, A.; Saffaran, S.; Laffey, J.G.; Brook, B.S.; Hardman, J.G.; Bates, D.G. Modeling Mechanical Ventilation In Silico—Potential and Pitfalls. Semin. Respir. Crit. Care Med. 2022, 43, 335–345. [Google Scholar] [CrossRef]
- Mehedi, I.M.; Shah, H.S.; Al-Saggaf, U.M.; Mansouri, R.; Bettayeb, M. Fuzzy PID control for respiratory systems. J. Healthc. Eng. 2021, 2021, 1926711. [Google Scholar] [CrossRef]
- Mehrmann, V.; Unger, B. Control of port-Hamiltonian differential-algebraic systems and applications. Acta Numer. 2023, 32, 395–515. [Google Scholar] [CrossRef]
- van der Schaft, A. Port-Hamiltonian Modeling for Control. Annu. Rev. Control Robot. Auton. Syst. 2020, 3, 393–416. [Google Scholar] [CrossRef]
- Villegas, J.A. A Port-Hamiltonian Approach to Distributed Parameter Systems. Ph.D. Thesis, Department of Applied Mathematics, Faculty EWI, Universiteit Twente, Enschede, The Netherlands, 2007. [Google Scholar]
- Le Gorrec, Y.; Zwart, H.; Maschke, B. Dirac structures and Boundary Control Systems associated with Skew-Symmetric Differential Operators. SIAM J. Control Optim. 2005, 44, 1864–1892. [Google Scholar] [CrossRef]
- van der Schaft, A.J.; Maschke, B.M. Hamiltonian formulation of distributed-parameter systems with boundary energy flow. J. Geom. Phys. 2002, 42, 166–194. [Google Scholar] [CrossRef]
- Anderson, J. Computational Fluid Dynamics: The Basics with Applications; McGraw-Hill International Editions: Mechanical Engineering; McGraw-Hill Inc.: New York, NY, USA, 1995. [Google Scholar]
- Kamiński, Z. A simplified lumped parameter model for pneumatic tubes. Math. Comput. Model. Dyn. Syst. 2017, 23, 523–535. [Google Scholar] [CrossRef]
- Albanese, A.; Cheng, L.; Ursino, M.; Chbat, N.W. An integrated mathematical model of the human cardiopulmonary system: Model development. Am. J. Physiol.-Heart Circ. Physiol. 2016, 310, H899–H921. [Google Scholar] [CrossRef] [PubMed]
- Bondy, J.A.; Murty, U.S.R. Graph Theory with Applications; The Macmillan Press Ltd.: London, UK, 1976. [Google Scholar]
- Taghizadeh, M.; Ghaffari, A.; Najafi, F. Modeling and identification of a solenoid valve for PWM control applications. Comptes Rendus Mécanique 2009, 337, 131–140. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value | Units |
|---|---|---|---|
| Pipe cross-sectional area | m2 | ||
| Pipe diameter | m | ||
| ℓ | Pipe length | m |
| Parameter | Description | Value | Units |
|---|---|---|---|
| Effective cross-sectional area | m2 | ||
| Spool surface area | m2 | ||
| Spool surface area | m2 | ||
| Spool surface area | m2 | ||
| Spool surface area | m2 | ||
| Viscous damping factor | Ns·m−1 | ||
| g | Acceleration due to gravity | m·s−2 | |
| Spring stiffness | N·m−1 | ||
| Length of the part of the magnetic circuit inside the core | m | ||
| Mass of the spool | kg | ||
| N | Number of turns in the coil | 1250 | turns |
| Total air gap | m | ||
| Pre-tension in the spring | m | ||
| Resistance of the coil | 13 | ||
| Permeability of air | N·A−2 | ||
| Permeability of the magnetic core | N·A−2 |
| Parameter | Description | Value | Units |
|---|---|---|---|
| Resistance from the mouth to larynx | cmH2O·s·L−1 | ||
| Resistance from the larynx to trachea | cmH2O·s·L−1 | ||
| Resistance from the trachea to bronchi | cmH2O·s·L−1 | ||
| Resistance from the bronchi to alveoli | cmH2O·s·L−1 | ||
| Compliance of the larynx | L/cmH2O | ||
| Compliance of the trachea | L/cmH2O | ||
| Compliance of the bronchi | L/cmH2O | ||
| Compliance of the alveoli | L/cmH2O | ||
| Compliance of the chest wall | L/cmH2O |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Madahana, M.C.I.; Ekoru, J.E.D.; Nyandoro, O.T.C. A Novel Mixed Finite/Infinite Dimensional Port–Hamiltonian Model of a Mechanical Ventilator. Computation 2024, 12, 155. https://doi.org/10.3390/computation12080155
Madahana MCI, Ekoru JED, Nyandoro OTC. A Novel Mixed Finite/Infinite Dimensional Port–Hamiltonian Model of a Mechanical Ventilator. Computation. 2024; 12(8):155. https://doi.org/10.3390/computation12080155
Chicago/Turabian StyleMadahana, Milka C. I., John E. D. Ekoru, and Otis T. C. Nyandoro. 2024. "A Novel Mixed Finite/Infinite Dimensional Port–Hamiltonian Model of a Mechanical Ventilator" Computation 12, no. 8: 155. https://doi.org/10.3390/computation12080155
APA StyleMadahana, M. C. I., Ekoru, J. E. D., & Nyandoro, O. T. C. (2024). A Novel Mixed Finite/Infinite Dimensional Port–Hamiltonian Model of a Mechanical Ventilator. Computation, 12(8), 155. https://doi.org/10.3390/computation12080155