
Evolutionary Computation Techniques for Path Planning Problems in Industrial Robotics: A State-of-the-Art Review



Abstract
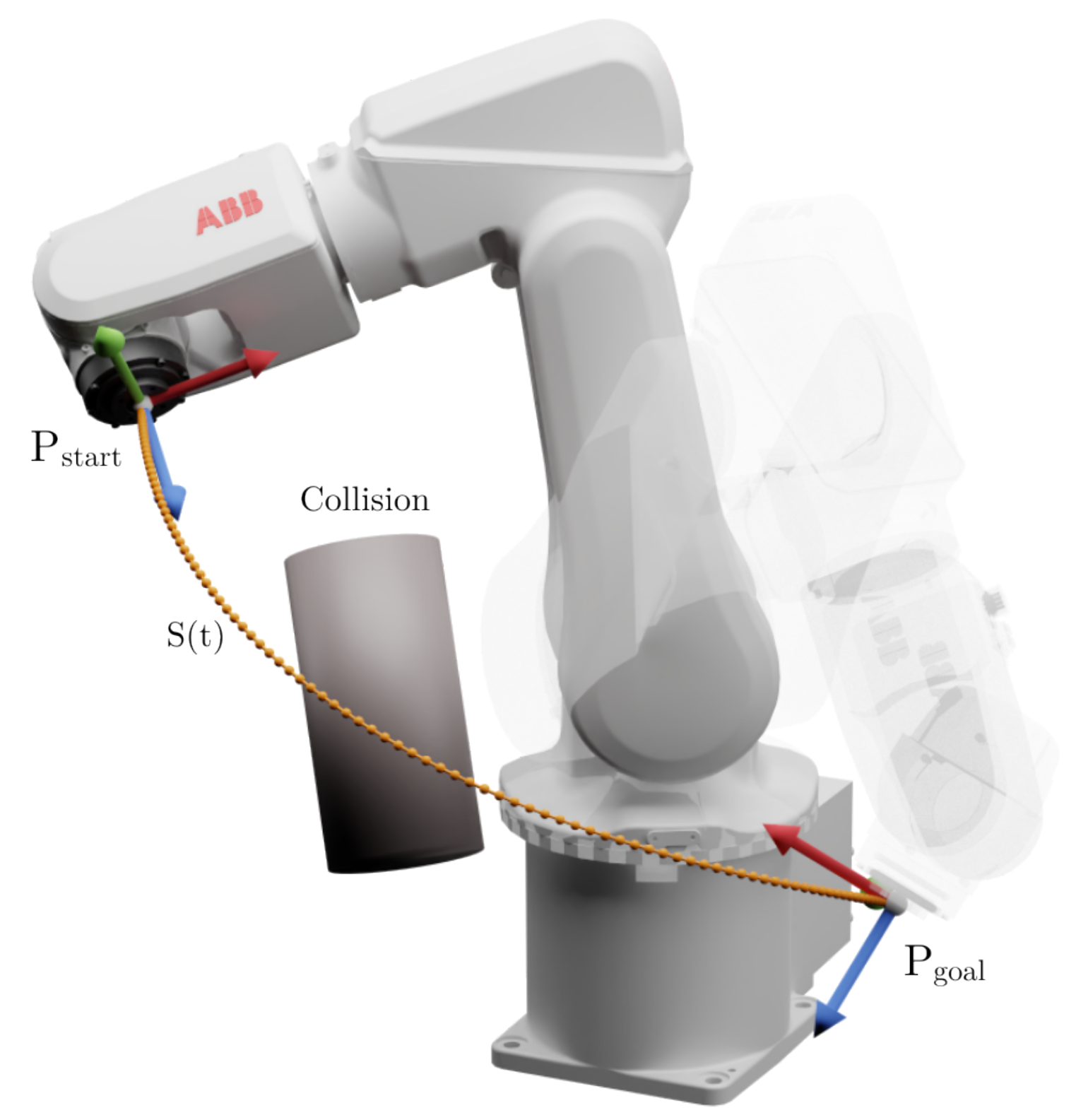
:1. Introduction
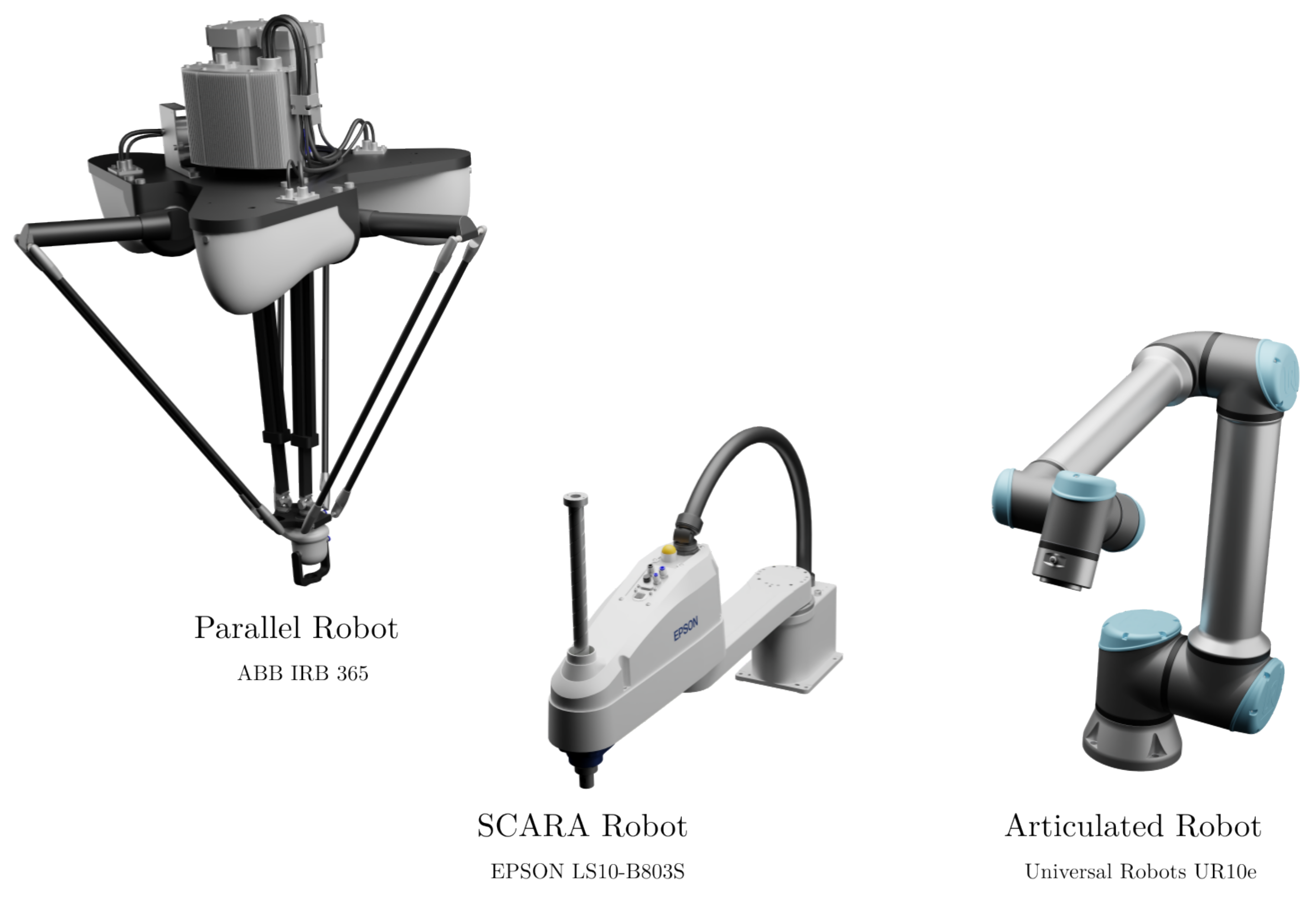
2. Industrial Robots
3. Tools for Robotic Applications
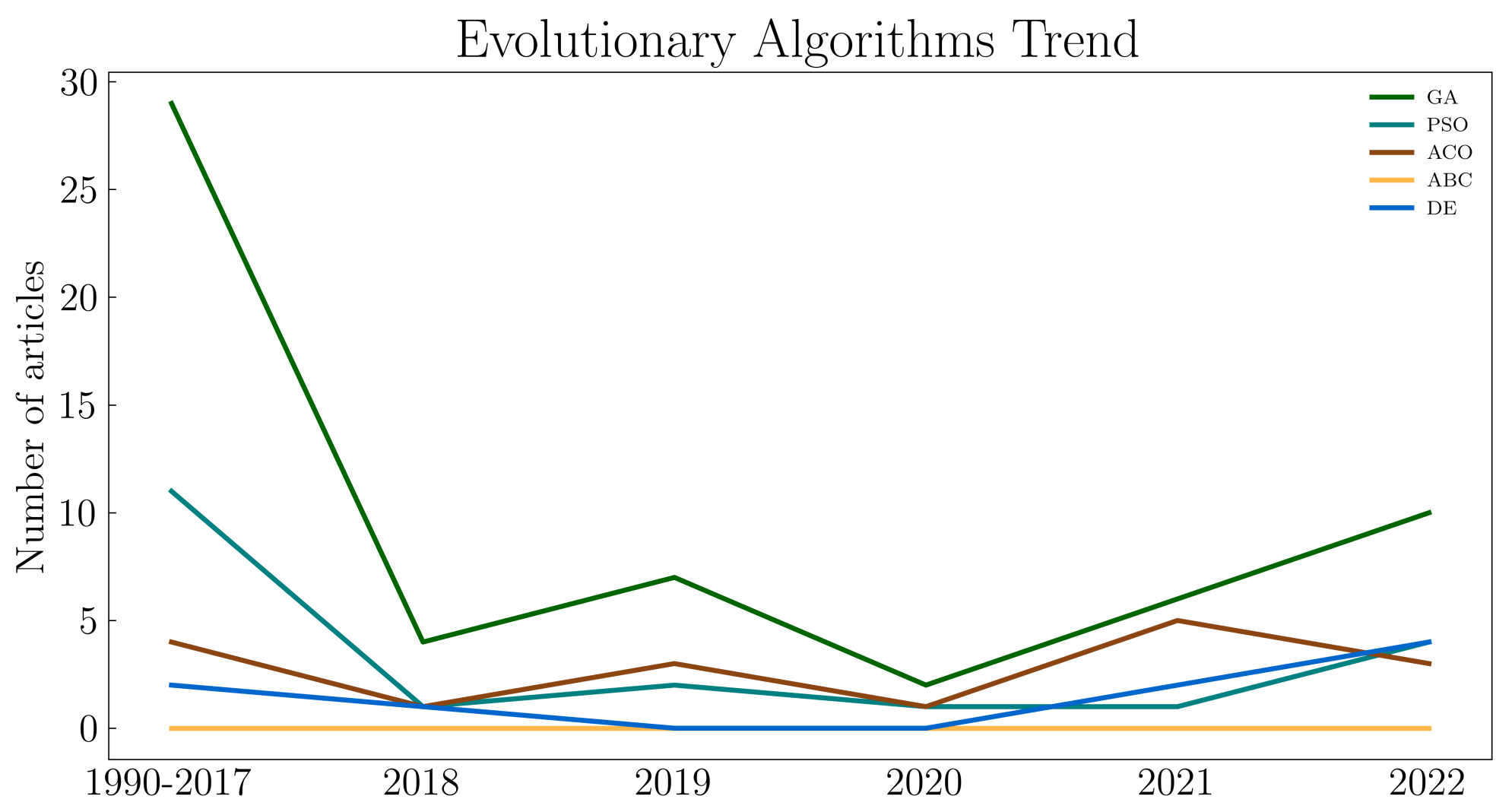
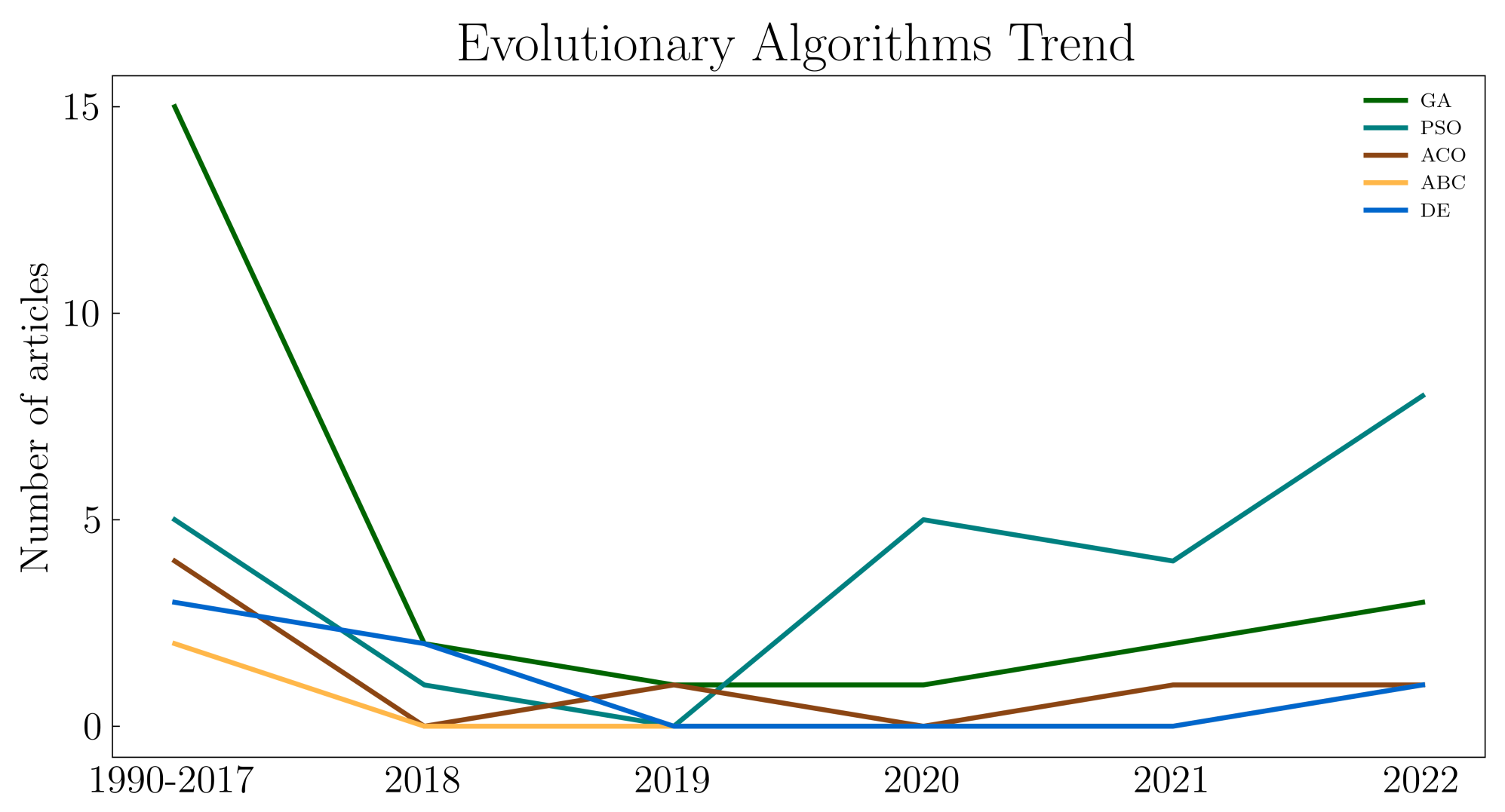
4. Evolutionary Algorithms
4.1. Particle Swarm Optimization
- represents the current position of particle i at iteration t.
- is the velocity of particle i at iteration , which is determined based on the particle’s own best position () and the global best position found by any particle in the swarm ():
- w is the inertia weight;
- and are acceleration coefficients;
- and are random numbers sampled from the uniform distribution.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Year | Type of Robotic Structure | Type of Problem | Software | Simulation Only |
|---|---|---|---|---|---|
| [64] | 2006 | 2-link (Redundant) | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [59] | 2020 | Special | Point-to-point motion planning and trajectory tracking. | MATLAB | Yes |
| [60] | 2021 | Articulated (Industrial) | Point-to-point motion planning and trajectory tracking. | MATLAB | No |
| [61] | 2022 | Articulated (Industrial) | Collision-free path planning. | MATLAB | No |
| [62] | 2022 | 5-link (Redundant) | Point-to-point motion planning and trajectory tracking. | MATLAB | Yes |
| [63] | 2022 | Articulated | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [65] | 2015 | Articulated (Industrial) | Point-to-point motion planning and trajectory tracking. | MATLAB | No |
| [66] | 2021 | Articulated (Industrial) | Collision-free path planning. | MATLAB | Yes |
| [67] | 2021 | Articulated (Industrial) | Optimal trajectory planning of complicated robotic timber joints. | Rhino & MATLAB | No |
| [68] | 2022 | Articulated | Point-to-point motion planning and trajectory tracking. | MATLAB | Yes |
| [69] | 2022 | Articulated (Collaborative) | Collision-free path planning. | MATLAB | Yes |
| [70] | 2023 | Articulated | Collision-free path planning. | Unspecified | No |
| [71] | 2020 | Paralell | Point-to-point motion planning and trajectory tracking. | MATLAB | Yes |
| [72] | 2020 | Articulated (Collaborative) | Collision-free path planning. | MATLAB & RoboDK | Yes |
| [73] | 2020 | Articulated (Collaborative) | Energy optimization for optimal motion planning. | CoppeliaSim | No |
| [74] | 2020 | Articulated (Industrial) | Energy optimization for optimal motion planning. | MATLAB | Yes |
| [75] | 2023 | Special | Collision-free path planning. | Unspecified | No |
| [76] | 2021 | Articulated (Industrial) | Collision-free path planning. | MATLAB | No |
| [77] | 2008 | 2-link (Redundant) | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [78] | 2008 | Articulated | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [79] | 2015 | Articulated | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [80] | 2018 | 7-link dual-arm | Collision-free path planning. | Unspecified | Yes |
| [81] | 2022 | 4-link dual-arm | Collision-free path planning. | Unspecified | Yes |
| [82] | 2022 | Special | Collision-free path planning. | MATLAB | Yes |
4.2. Genetic Algorithm
| Ref. | Year | Type of Robotic Structure | Type of Problem | Software | Simulation Only |
|---|---|---|---|---|---|
| [84] | 1991 | 3-link (redundant) | Path planning with obstacle avoidance. | Unspecified | Yes |
| [85] | 1995 | 3-link (redundant) | Collision-free path planning. | Unspecified | Yes |
| [86] | 2002 | 2-link (redundant) cooperating robots | Path planning and torque minimization. | Unspecified | Yes |
| [87] | 2002 | 3-link (redundant) | Point-to-point trajectory planning to minimize time and/or vibration. | Unspecified | Yes |
| [88] | 2004 | 2-link (redundant) | Minimization of rotation angles | Unspecified | Yes |
| [89] | 2004 | (2, 3)-link (redundant) | Collision-free path planning with multiple objectives. | Unspecified | Yes |
| [90] | 2008 | 3-link (redundant) | Collision-free point-to-point trajectory planning to minimize travel time and space. | Unspecified | Yes |
| [91] | 2008 | Articulated (Industrial) | Collision-free path planning for sand-blasting operation. | Unspecified | No |
| [92] | 2010 | 3-link (redundant) | Point-to-point trajectory planning to minimize time and energy. | Unspecified | Yes |
| [93] | 2011 | 2-link (redundant) and Articulated (Industrial) | Collision-free Cartesian path planning. | Unspecified | Yes |
| [94] | 2013 | 3-link (redundant) | Point-to-point motion planning in a complex geometric environment. | MATLAB | Yes |
| [95] | 2014 | Articulated (Collaborative) | Point-to-point motion planning and trajectory tracking. | MATLAB & Simulink | Yes |
| [96] | 2014 | Articulated (Industrial) | Minimization of the operating-time, energy consumption and rotations angles. | Unspecified | Yes |
| [97] | 2016 | 3-link (redundant) | Path planning to reach the position of an object obtained from EEG (electroencephalography) signals. | MATLAB | Yes |
| [98] | 2017 | Articulated (Collaborative) | Trajectory planning with obstacle avoidance. | MATLAB | No |
| [99] | 2018 | Articulated (Industrial) | Adaptive singularity-robust path planning. | ADAMS | Yes |
| [100] | 2019 | Articulated (Industrial) | Online time-optimal trajectory planning. | MATLAB | No |
| [101] | 2020 | Articulated (Industrial) cooperating robots | Path optimization to reduce joint torques. | Unspecified | No |
| [102] | 2021 | Articulated (Industrial) cooperating robots | Automatic calculation of paths of cooperating robots. | Helix Toolkit & BEPUphysics | No |
| [67] | 2021 | Articulated (Industrial) | Optimal trajectory planning of complicated robotic timber joints. | Rhino & MATLAB | No |
| [103] | 2022 | Special | Path planning method with obstacle avoidance for tomato picking. | MATLAB | No |
| [104] | 2022 | SCARA cooperating robots | Energy optimization for optimal motion planning. | Python & K-ROSET | No |
| [105] | 2022 | Articulated (Collaborative) | Minimization of the risk of collisions and travel time. | ABB RobotStudio | No |
4.3. Ant Colony Optimization
- Ants: Artificial ants are used to explore and construct solutions. Each ant represents a potential solution to the problem;
- Pheromones: Ants deposit pheromones on the paths they traverse. Pheromone levels on a path represent the quality of that path;
- Decision Rule: Ants use a decision rule to probabilistically choose the next path to explore. Pheromone levels and heuristics guide their decisions;
- Pheromone Update: After all ants have completed their exploration, the pheromone levels are updated based on the quality of the solutions found. This guides future ant exploration.
- is the pheromone level on path .
- is the pheromone evaporation rate.
- is the pheromone increment for path .
| Ref. | Year | Type of Robotic Structure | Type of Problem | Software | Simulation Only |
|---|---|---|---|---|---|
| [108] | 2005 | Articulated (Industrial) | Collision-free path planning. | Visual C++ | Yes |
| [109] | 2006 | Articulated (Industrial) | Collision-free path planning. | Visual C++ | Yes |
| [111] | 2009 | 3-link (redundant) dual-arm | Collision-free path planning. | Visual C++ | Yes |
| [110] | 2017 | 2-link (redundant) | Point-to-point motion planning and trajectory tracking. | MATLAB | Yes |
| [112] | 2019 | SCARA | Path planning with obstacle avoidance. | Unspecified | No |
| [113] | 2021 | 2-link (redundant) | Collision-free path planning. | Unspecified | Yes |
| [114] | 2022 | Articulated (Industrial) | Collision-free path planning. | ABB RobotStu-dio. | Yes |
4.4. Differential Evolution
- Population Initialization:
- Mutation (differential variant):
- Crossover (exponential variant):
- Selection (elitism):where is the fitness function, , and are randomly selected indices from the population, and F is the mutation factor, represents random values for each element j of the vector, is the crossover constant, and is a randomly selected index.
| Ref. | Year | Type of Robotic Structure | Type of Problem | Software | Simulation Only |
|---|---|---|---|---|---|
| [117] | 2008 | Articulated | Optimal trajectory planning of dynamic free motion. | Visual C++ | Yes |
| [118] | 2010 | SCARA | Collision-free path planning. | Visual C++ | No |
| [119] | 2009 | Articulated (Industrial) | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [120] | 2018 | 3-link (redundant) | Energy optimization for optimal motion planning. | MATLAB | Yes |
| [121] | 2018 | Articulated | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [122] | 2022 | Special | Collision-free path planning. | MATLAB | No |
4.5. Artificial Bee Colony
- Population Initialization:
- Employed bees: In this phase, employed bees explore food sources and perform local searches around the food sources they are currently exploiting.
- Onlooker bees: Onlooker bees choose food sources to exploit based on the information provided by employed bees. The probability of selecting a food source is determined by its quality.
- Scout bees: Scout bees are responsible for discovering new food sources. If a food source has not been improved for a certain number of iterations, it is abandoned and replaced with a randomly generated solution.where N is the number of bees, represents the position of bee i at iteration t, is the initial position, is the position after exploration, is the fitness function, is a random number in the range , and is a randomly generated solution.
| Ref. | Year | Type of Robotic Structure | Type of Problem | Software | Simulation Only |
|---|---|---|---|---|---|
| [125] | 2012 | Special | Collision-free path planning. | MATLAB | Yes |
| [126] | 2013 | 3-link (redundant) | Point-to-point motion planning and trajectory tracking. | MATLAB | Yes |
| [127] | 2023 | Special | Collision-free path planning. | Unspecified | No |
| [128] | 2022 | Articulated (Collaborative) | Collision-free path planning. | MATLAB | No |
4.6. Other Methods
| Ref. | Year | Type of Robotic Structure | Type of Problem | Software | Simulation Only |
|---|---|---|---|---|---|
| [129] | 2019 | Articulated (Industrial) | Collision-free path planning. | Unspecified | Yes |
| [130] | 2021 | Articulated (Industrial) | Point-to-point motion planning and trajectory tracking. | MATLAB | No |
| [131] | 2020 | Articulated (Collaborative) | Point-to-point motion planning and trajectory tracking. | MATLAB | No |
| [132] | 2019 | Parallel | Point-to-point motion planning and trajectory tracking. | Unspecified | No |
| [133] | 2020 | Articulated (Industrial) | Point-to-point motion planning and trajectory tracking. | MATLAB & ABB RobotStudio | No |
| [135] | 2018 | Articulated (Industrial) | Point-to-point motion planning and trajectory tracking. | Unspecified | Yes |
| [138] | 2023 | Articulated (Industrial) | Optimal trajectory planning. | MATLAB | Yes |
4.7. Research Gaps and Directions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Jin, L. Robot Manipulator Redundancy Resolution; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Billard, A.; Kragic, D. Trends and challenges in robot manipulation. Science 2019, 364, eaat8414. [Google Scholar] [CrossRef] [PubMed]
- Seereeram, S.; Wen, J.T. A global approach to path planning for redundant manipulators. IEEE Trans. Robot. Autom. 1995, 11, 152–160. [Google Scholar] [CrossRef]
- Kim, J.O.; Khosla, P.K. Real-time obstacle avoidance using harmonic potential functions. IEEE Trans. Robot. Autom. 1992, 8, 338–349. [Google Scholar] [CrossRef]
- Baillieul, J. Kinematic programming alternatives for redundant manipulators. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; IEEE: New York, NY, USA, 1985; Volume 2, pp. 722–728. [Google Scholar]
- Xanthidis, M.; Esposito, J.; Rekleitis, I.; O’Kane, J. Analysis of Motion Planning by Sampling in Subspaces of Progressively Increasing Dimension. J. Intell. Robot. Syst. 2020, 100, 777–789. [Google Scholar] [CrossRef]
- Liu, S.; Liu, P. Benchmarking and optimization of robot motion planning with motion planning pipeline. Int. J. Adv. Manuf. Technol. 2022, 118, 949–961. [Google Scholar] [CrossRef]
- Iversen, T.; Ellekilde, L.P. Benchmarking motion planning algorithms for bin-picking applications. Ind. Robot. Int. J. 2017, 44, 189–197. [Google Scholar] [CrossRef]
- Ying, K.C.; Pourhejazy, P.; Cheng, C.Y.; Cai, Z.Y. Deep learning-based optimization for motion planning of dual-arm assembly robots. Comput. Ind. Eng. 2021, 160, 107603. [Google Scholar] [CrossRef]
- Lobbezoo, A.; Qian, Y.; Kwon, H.J. Reinforcement Learning for Pick and Place Operations in Robotics: A Survey. Robotics 2021, 10, 105. [Google Scholar] [CrossRef]
- Plappert, M.; Andrychowicz, M.; Ray, A.; McGrew, B.; Baker, B.; Powell, G.; Schneider, J.; Tobin, J.; Chociej, M.; Welinder, P.; et al. Multi-Goal Reinforcement Learning: Challenging Robotics Environments and Request for Research. arXiv 2018, arXiv:1802.09464. [Google Scholar]
- Jin, L.; Li, S.; Yu, J.; He, J. Robot manipulator control using neural networks: A survey. Neurocomputing 2018, 285, 23–34. [Google Scholar] [CrossRef]
- Liu, R.; Nageotte, F.; Zanne, P.; de Mathelin, M.; Dresp-Langley, B. Deep reinforcement learning for the control of robotic manipulation: A focussed mini-review. Robotics 2021, 10, 22. [Google Scholar] [CrossRef]
- Ajwad, S.A.; Iqbal, J.; Ullah, M.I.; Mehmood, A. A systematic review of current and emergent manipulator control approaches. Front. Mech. Eng. 2015, 10, 198–210. [Google Scholar] [CrossRef]
- Zhang, D.; Wei, B. A review on model reference adaptive control of robotic manipulators. Annu. Rev. Control 2017, 43, 188–198. [Google Scholar] [CrossRef]
- Starke, S.; Hendrich, N.; Magg, S.; Zhang, J. An efficient hybridization of Genetic Algorithms and Particle Swarm Optimization for inverse kinematics. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1782–1789. [Google Scholar] [CrossRef]
- Ruppel, P.; Hendrich, N.; Starke, S.; Zhang, J. Cost Functions to Specify Full-Body Motion and Multi-Goal Manipulation Tasks. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 3152–3159. [Google Scholar] [CrossRef]
- Xiao, Y.; Fan, Z.; Li, W.; Chen, S.; Zhao, L.; Xie, H. A Manipulator Design Optimization Based on Constrained Multi-objective Evolutionary Algorithms. In Proceedings of the 2016 International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), Wuhan, China, 3–4 December 2016; pp. 199–205. [Google Scholar] [CrossRef]
- Park, J.H.; Lee, K.H. Computational Design of Modular Robots Based on Genetic Algorithm and Reinforcement Learning. Symmetry 2021, 13, 471. [Google Scholar] [CrossRef]
- Hsiao, J.C.; Shivam, K.; Chou, C.L.; Kam, T.Y. Shape Design Optimization of a Robot Arm Using a Surrogate-Based Evolutionary Approach. Appl. Sci. 2020, 10, 2223. [Google Scholar] [CrossRef]
- Xuan, D.T.; Huynh, T.V.; Hung, N.T.; Thang, V.T. Applying Digital Twin and Multi-Adaptive Genetic Algorithms in Human–Robot Cooperative Assembly Optimization. Appl. Sci. 2023, 13, 4229. [Google Scholar] [CrossRef]
- Eklund, M.; Sierla, S.; Niemistö, H.; Korvola, T.; Savolainen, J.; Karhela, T. Using a Digital Twin as the Objective Function for Evolutionary Algorithm Applications in Large Scale Industrial Processes. IEEE Access 2023, 11, 24185–24202. [Google Scholar] [CrossRef]
- Liu, X.; Jiang, D.; Tao, B.; Jiang, G.; Sun, Y.; Kong, J.; Tong, X.; Zhao, G.; Chen, B. Genetic Algorithm-Based Trajectory Optimization for Digital Twin Robots. Front. Bioeng. Biotechnol. 2022, 9, 793782. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, Q.; Sun, Y. Evolutionary Robot Calibration and Nonlinear Compensation Methodology Based on GA-DNN and an Extra Compliance Error Model. Math. Probl. Eng. 2020, 2020, 3981081. [Google Scholar] [CrossRef]
- Larsen, L.; Schuster, A.; Kim, J.; Kupke, M. Path Planning of Cooperating Industrial Robots Using Evolutionary Algorithms. Procedia Manuf. 2018, 17, 286–293. [Google Scholar] [CrossRef]
- Vargas, P.A.; Di Paolo, E.A.; Harvey, I.; Husbands, P. The Horizons of Evolutionary Robotics; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Doncieux, S.; Bredeche, N.; Mouret, J.B.; Eiben, A.E. Evolutionary robotics: What, why, and where to. Front. Robot. AI 2015, 2, 4. [Google Scholar] [CrossRef]
- Silva, F.; Duarte, M.; Correia, L.; Oliveira, S.M.; Christensen, A.L. Open issues in evolutionary robotics. Evol. Comput. 2016, 24, 205–236. [Google Scholar] [CrossRef] [PubMed]
- Parak, R.; Matousek, R. Comparison of multiple reinforcement learning and deep reinforcement learning methods for the task aimed at achieving the goal. MENDEL J. 2021, 27, 1–8. [Google Scholar] [CrossRef]
- Parak, R.; Juricek, M. Intelligent sampling of anterior human nasal swabs using a collaborative robotic arm. MENDEL J. 2022, 28, 32–40. [Google Scholar] [CrossRef]
- Nof, S.Y. Handbook of Industrial Robotics; John Wiley & Sons: Hoboken, NJ, USA, 1999. [Google Scholar]
- Bonev, I. Delta Parallel Robot-the Story of Success. Newsletter. 2001. Available online: http://www.parallelmic.org (accessed on 1 October 2023).
- Visioli, A.; Legnani, G. On the trajectory tracking control of industrial SCARA robot manipulators. IEEE Trans. Ind. Electron. 2002, 49, 224–232. [Google Scholar] [CrossRef]
- Moran, M.E. Evolution of robotic arms. J. Robot. Surg. 2007, 1, 103–111. [Google Scholar] [CrossRef] [PubMed]
- Todorov, E.; Erez, T.; Tassa, Y. MuJoCo: A physics engine for model-based control. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5026–5033. [Google Scholar] [CrossRef]
- Collins, J.; Chand, S.; Vanderkop, A.; Howard, D. A Review of Physics Simulators for Robotic Applications. IEEE Access 2021, 9, 51416–51431. [Google Scholar] [CrossRef]
- Matousek, R.; Dobrovsky, L.; Kudela, J. How to start a heuristic? Utilizing lower bounds for solving the quadratic assignment problem. Int. J. Ind. Eng. Comput. 2022, 13, 151–164. [Google Scholar] [CrossRef]
- Campelo, F.; Aranha, C.d.C. Sharks, zombies and volleyball: Lessons from the evolutionary computation bestiary. In Proceedings of the CEUR Workshop Proceedings, Milan, Italy, 30 November 2021; Volume 3007, p. 6. [Google Scholar]
- Tzanetos, A.; Dounias, G. Nature inspired optimization algorithms or simply variations of metaheuristics? Artif. Intell. Rev. 2021, 54, 1841–1862. [Google Scholar] [CrossRef]
- Tzanetos, A.; Fister, I., Jr.; Dounias, G. A comprehensive database of Nature-Inspired Algorithms. Data Brief 2020, 31, 105792. [Google Scholar] [CrossRef]
- Niu, P.; Niu, S.; Chang, L. The defect of the Grey Wolf optimization algorithm and its verification method. Knowl.-Based Syst. 2019, 171, 37–43. [Google Scholar] [CrossRef]
- Kudela, J. Commentary on: “STOA: A bio-inspired based optimization algorithm for industrial engineering problems” [EAAI, 82 (2019), 148–174] and “Tunicate Swarm Algorithm: A new bio-inspired based metaheuristic paradigm for global optimization” [EAAI, 90 (2020), no. 103541]. Eng. Appl. Artif. Intell. 2022, 113, 104930. [Google Scholar]
- Kudela, J. A critical problem in benchmarking and analysis of evolutionary computation methods. Nat. Mach. Intell. 2022, 4, 1238–1245. [Google Scholar] [CrossRef]
- Deng, L.; Liu, S. Deficiencies of the whale optimization algorithm and its validation method. Expert Syst. Appl. 2024, 237, 121544. [Google Scholar] [CrossRef]
- Camacho Villalón, C.L.; Stützle, T.; Dorigo, M. Grey wolf, firefly and bat algorithms: Three widespread algorithms that do not contain any novelty. In Proceedings of the International Conference on Swarm Intelligence, Belgrade, Serbia, 14–20 July 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 121–133. [Google Scholar]
- Aranha, C.; Camacho Villalón, C.L.; Campelo, F.; Dorigo, M.; Ruiz, R.; Sevaux, M.; Sörensen, K.; Stützle, T. Metaphor-based metaheuristics, a call for action: The elephant in the room. Swarm Intell. 2022, 16, 1–6. [Google Scholar] [CrossRef]
- Kudela, J.; Matousek, R. Recent advances and applications of surrogate models for finite element method computations: A review. Soft Comput. 2022, 26, 13709–13733. [Google Scholar] [CrossRef]
- Tzanetos, A.; Dounias, G. A comprehensive survey on the applications of swarm intelligence and bio-inspired evolutionary strategies. In Machine Learning Paradigms: Advances in Deep Learning-Based Technological Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 337–378. [Google Scholar]
- Tzanetos, A.; Blondin, M. A qualitative systematic review of metaheuristics applied to tension/compression spring design problem: Current situation, recommendations, and research direction. Eng. Appl. Artif. Intell. 2023, 118, 105521. [Google Scholar] [CrossRef]
- Žufan, P.; Bidlo, M. Advances in evolutionary optimization of quantum operators. MENDEL J. 2021, 27, 12–22. [Google Scholar] [CrossRef]
- Muller, J. Improving initial aerofoil geometry using aerofoil particle swarm optimisation. MENDEL J. 2022, 28, 63–67. [Google Scholar] [CrossRef]
- Ma, J.; Xia, D.; Wang, Y.; Niu, X.; Jiang, S.; Liu, Z.; Guo, H. A comprehensive comparison among metaheuristics (MHs) for geohazard modeling using machine learning: Insights from a case study of landslide displacement prediction. Eng. Appl. Artif. Intell. 2022, 114, 105150. [Google Scholar] [CrossRef]
- Kanagaraj, G.; Masthan, S.S.; Vincent, F.Y. Meta-heuristics based inverse kinematics of robot manipulator’s path tracking capability under joint limits. MENDEL J. 2022, 28, 41–54. [Google Scholar] [CrossRef]
- Febrianti, W.; Sidarto, K.A.; Sumarti, N. Approximate Solution for Barrier Option Pricing Using Adaptive Differential Evolution With Learning Parameter. MENDEL J. 2022, 28, 76–82. [Google Scholar] [CrossRef]
- Gogna, A.; Tayal, A. Metaheuristics: Review and application. J. Exp. Theor. Artif. Intell. 2013, 25, 503–526. [Google Scholar] [CrossRef]
- Darwish, A.; Hassanien, A.E.; Das, S. A survey of swarm and evolutionary computing approaches for deep learning. Artif. Intell. Rev. 2020, 53, 1767–1812. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Gad, A.G. Particle Swarm Optimization Algorithm and Its Applications: A Systematic Review. Arch. Comput. Methods Eng. 2022, 29, 2531–2561. [Google Scholar] [CrossRef]
- Zhang, W.; Fu, S. Time-optimal Trajectory Planning of Dulcimer Music Robot Based on PSO Algorithm. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 4769–4774. [Google Scholar] [CrossRef]
- Shi, B.; Zeng, H. Time-Optimal Trajectory Planning for Industrial Robot based on Improved Hybrid-PSO. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 3888–3893. [Google Scholar] [CrossRef]
- Du, Y.; Chen, Y. Time Optimal Trajectory Planning Algorithm for Robotic Manipulator Based on Locally Chaotic Particle Swarm Optimization. Chin. J. Electron. 2022, 31, 906–914. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhang, Q. Time optimal trajectory planning of five degrees of freedom manipulator based on PSO algorithm. In Proceedings of the 2022 4th International Conference on Intelligent Control, Measurement and Signal Processing (ICMSP), Hangzhou, China, 8–10 July 2022; pp. 1059–1062. [Google Scholar] [CrossRef]
- Miao, X.; Fu, H.; Song, X. Research on motion trajectory planning of the robotic arm of a robot. Artif. Life Robot. 2022, 27, 561–567. [Google Scholar] [CrossRef]
- Huang, P.; Xu, Y. PSO-Based Time-Optimal Trajectory Planning for Space Robot with Dynamic Constraints. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 1402–1407. [Google Scholar] [CrossRef]
- Kim, J.J.; Lee, J.J. Trajectory Optimization with Particle Swarm Optimization for Manipulator Motion Planning. IEEE Trans. Ind. Inform. 2015, 11, 620–631. [Google Scholar] [CrossRef]
- Han, S.; Shan, X.; Fu, J.; Xu, W.; Mi, H. Industrial robot trajectory planning based on improved pso algorithm. J. Physics Conf. Ser. 2021, 1820, 012185. [Google Scholar] [CrossRef]
- Meng, Y.; Sun, Y.; Chang, W.-S. Optimal trajectory planning of complicated robotic timber joints based on particle swarm optimization and an adaptive genetic algorithm. Constr. Robot. 2021, 5, 131–146. [Google Scholar] [CrossRef]
- Zhou, W.; Fan, C.; Wang, L.; Xie, C.; Tang, T.; Liu, R. Path planning of manipulator based on improved particle swarm optimization. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; pp. 4283–4288. [Google Scholar] [CrossRef]
- Zhao, J.; Zhu, X.; Song, T. Serial Manipulator Time-Jerk Optimal Trajectory Planning Based on Hybrid IWOA-PSO Algorithm. IEEE Access 2022, 10, 6592–6604. [Google Scholar] [CrossRef]
- Ekrem, Ö.; Aksoy, B. Trajectory planning for a 6-axis robotic arm with particle swarm optimization algorithm. Eng. Appl. Artif. Intell. 2023, 122, 106099. [Google Scholar] [CrossRef]
- Liu, C.; Cao, G.H.; Qu, Y.Y.; Cheng, Y.M. An improved PSO algorithm for time-optimal trajectory planning of Delta robot in intelligent packaging. Int. J. Adv. Manuf. Technol. 2020, 107, 1091–1099. [Google Scholar] [CrossRef]
- Lin, C.J.; Li, M.Y. Motion planning with obstacle avoidance of an UR3 robot using charge system search. In Proceedings of the 2018 18th International Conference on Control, Automation and Systems (ICCAS), PyeongChang, Republic of Korea, 17–20 October 2018; pp. 746–750. [Google Scholar]
- Vysocký, A.; Papřok, R.; Šafařík, J.; Kot, T.; Bobovský, Z.; Novák, P.; Snášel, V. Reduction in Robotic Arm Energy Consumption by Particle Swarm Optimization. Appl. Sci. 2020, 10, 8241. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, C.; Zeng, Q.; Li, A.; Xie, N. Time-energy Optimal Trajectory Planning for Collaborative Welding Robot with Multiple Manipulators. Procedia Manuf. 2020, 43, 527–534. [Google Scholar] [CrossRef]
- Gao, R.; Zhou, Q.; Cao, S.; Jiang, Q. Apple-Picking Robot Picking Path Planning Algorithm Based on Improved PSO. Electronics 2023, 12, 1832. [Google Scholar] [CrossRef]
- Cao, X.; Yan, H.; Huang, Z.; Ai, S.; Xu, Y.; Fu, R.; Zou, X. A Multi-Objective Particle Swarm Optimization for Trajectory Planning of Fruit Picking Manipulator. Agronomy 2021, 11, 2286. [Google Scholar] [CrossRef]
- Huang, P.; Liu, G.; Yuan, J.; Xu, Y. Multi-Objective Optimal Trajectory Planning of Space Robot Using Particle Swarm Optimization. In Proceedings of the Advances in Neural Networks—ISNN 2008, Beijing, China, 24–28 September 2008; Sun, F., Zhang, J., Tan, Y., Cao, J., Yu, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 171–179. [Google Scholar]
- Xu, W.; Li, C.; Liang, B.; Liu, Y.; Xu, Y. The Cartesian Path Planning of Free-Floating Space Robot using Particle Swarm Optimization. Int. J. Adv. Robot. Syst. 2008, 5, 27. [Google Scholar] [CrossRef]
- Wang, M.; Luo, J.; Walter, U. Trajectory planning of free-floating space robot using Particle Swarm Optimization (PSO). Acta Astronaut. 2015, 112, 77–88. [Google Scholar] [CrossRef]
- Wang, M.; Luo, J.; Yuan, J.; Walter, U. Coordinated trajectory planning of dual-arm space robot using constrained particle swarm optimization. Acta Astronaut. 2018, 146, 259–272. [Google Scholar] [CrossRef]
- Ni, S.; Chen, W.; Ju, H.; Chen, T. Coordinated trajectory planning of a dual-arm space robot with multiple avoidance constraints. Acta Astronaut. 2022, 195, 379–391. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, J.; Zhang, Q.; Wei, X. Obstacle Avoidance Path Planning of Space Robot Based on Improved Particle Swarm Optimization. Symmetry 2022, 14, 938. [Google Scholar] [CrossRef]
- Grefenstette, J.J. Genetic algorithms and machine learning. In Proceedings of the Sixth Annual Conference on Computational Learning Theory, Santa Cruz, CA, USA, 26–28 July 1993; pp. 3–4. [Google Scholar]
- Khoogar, A.; Parker, J. Obstacle avoidance of redundant manipulators using genetic algorithms. In Proceedings of the IEEE Proceedings of the SOUTHEASTCON ’91, Williamsburg, VA, USA, 7–10 April 1991; Volume 1, pp. 317–320. [Google Scholar] [CrossRef]
- Toogood, R.; Hao, H.; Wong, C. Robot path planning using genetic algorithms. In Proceedings of the 1995 IEEE International Conference on Systems, Man and Cybernetics, Intelligent Systems for the 21st Century, Vancouver, BC, Canada, 22–25 October 1995; Volume 1, pp. 489–494. [Google Scholar] [CrossRef]
- Garg, D.P.; Kumar, M. Optimization techniques applied to multiple manipulators for path planning and torque minimization. Eng. Appl. Artif. Intell. 2002, 15, 241–252. [Google Scholar] [CrossRef]
- Yue, S.; Henrich, D.; Xu, P.; Tso, S. Point-to-Point trajectory planning of flexible redundant robot manipulators using genetic algorithms. Robotica 2002, 20, 269–280. [Google Scholar] [CrossRef]
- Tian, L.; Collins, C. An effective robot trajectory planning method using a genetic algorithm. Mechatronics 2004, 14, 455–470. [Google Scholar] [CrossRef]
- Pires, E.; Tenreiro Machado, J.; Moura Oliveira, P. Robot Trajectory Planning Using Multi-objective Genetic Algorithm Optimization. In Proceedings of the Genetic and Evolutionary Computation—GECCO 2004, Seattle, WA, USA, 26–30 June 2004; Volume 3102, pp. 615–626. [Google Scholar] [CrossRef]
- Kazem, B.I.; Mahdi, A.I.; Oudah, A.T. Motion Planning for a Robot Arm by Using Genetic Algorithm. 2008. Available online: https://api.semanticscholar.org/CorpusID:957663 (accessed on 1 October 2023).
- Ren, T.R.; Kwok, N.M.; Liu, D.K.; Huang, S.D. Path planning for a robotic arm sand-blasting system. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008; pp. 1067–1072. [Google Scholar] [CrossRef]
- Sharma, G.S.; Singh, M.; Singh, T. Optimization of energy in robotic arm using genetic algorithm. Int. J. Comput. Sci. Technol. 2011, 2, 315–317. [Google Scholar]
- Abo-Hammour, Z.; Alsmadi, P.O.; Bataineh, S.; Alomari, M.; Affach, N. Continuous Genetic Algorithms for Collision-Free Cartesian Path Planning of Robot Manipulators. Int. J. Adv. Robot. Syst. 2011, 8, 50902. [Google Scholar] [CrossRef]
- Machmudah, A.; Parman, S.; Zainuddin, A.; Chacko, S. Polynomial joint angle arm robot motion planning in complex geometrical obstacles. Appl. Soft Comput. 2013, 13, 1099–1109. [Google Scholar] [CrossRef]
- Tsai, C.C.; Hung, C.C.; Chang, C.F. Trajectory planning and control of a 7-DOF robotic manipulator. In Proceedings of the 2014 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 6–8 June 2014; pp. 78–84. [Google Scholar] [CrossRef]
- Števo, S.; Sekaj, I.; Dekan, M. Optimization of Robotic Arm Trajectory Using Genetic Algorithm. In Proceedings of the IFAC World Congress 2014, Cape Town, South Africa, 24–29 August 2014. [Google Scholar] [CrossRef]
- Roy, R.; Mahadevappa, M.; Kumar, C. Trajectory Path Planning of EEG Controlled Robotic Arm Using GA. Procedia Comput. Sci. 2016, 84, 147–151. [Google Scholar] [CrossRef]
- Yang, M.; Jiang, Y.; Sun, J. Research on Trajectory Planning of Manipulator Based on GA—APF Algorithm. In Proceedings of the 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Honolulu, HI, USA, 31 July–4 August 2017; pp. 210–215. [Google Scholar] [CrossRef]
- Wu, J.; Bin, D.; Feng, X.; Wen, Z.; Zhang, Y. GA Based Adaptive Singularity-Robust Path Planning of Space Robot for On-Orbit Detection. Complexity 2018, 2018, 3702916. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, C.; Weng, Y. Online Time-Optimal Trajectory Planning for Robotic Manipulators Using Adaptive Elite Genetic Algorithm With Singularity Avoidance. IEEE Access 2019, 7, 146301–146308. [Google Scholar] [CrossRef]
- Baressi Šegota, S.; Anđelić, N.; Lorencin, I.; Saga, M.; Car, Z. Path planning optimization of six-degree-of-freedom robotic manipulators using evolutionary algorithms. Int. J. Adv. Robot. Syst. 2020, 17, 1–16. [Google Scholar] [CrossRef]
- Larsen, L.; Kim, J. Path planning of cooperating industrial robots using evolutionary algorithms. Robot. Comput.-Integr. Manuf. 2021, 67, 102053. [Google Scholar] [CrossRef]
- Fang, Z.; Liang, X. Intelligent obstacle avoidance path planning method for picking manipulator combined with artificial potential field method. Ind. Robot. Int. J. Robot. Res. Appl. 2022, 49, 835–850. [Google Scholar] [CrossRef]
- Nonoyama, K.; Liu, Z.; Fujiwara, T.; Alam, M.M.; Nishi, T. Energy-Efficient Robot Configuration and Motion Planning Using Genetic Algorithm and Particle Swarm Optimization. Energies 2022, 15, 2074. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Messeri, C.; Cristantielli, D.; Rocco, P. Trajectory optimisation in collaborative robotics based on simulations and genetic algorithms. Int. J. Intell. Robot. Appl. 2022, 6, 707–723. [Google Scholar] [CrossRef]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Dorigo, M.; Stützle, T. Ant Colony Optimization: Overview and Recent Advances. In Handbook of Metaheuristics; Gendreau, M., Potvin, J.Y., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 311–351. [Google Scholar] [CrossRef]
- Mohamad, M.; Dunnigan, M.; Taylor, N. Ant Colony Robot Motion Planning. In Proceedings of the EUROCON 2005—The International Conference on “Computer as a Tool”, Belgrade, Serbia, 21–24 November 2005; Volume 1, pp. 213–216. [Google Scholar] [CrossRef]
- Mohamad, M.; Taylor, N.; Dunnigan, M. Articulated Robot Motion Planning Using Ant Colony Optimisation. In Proceedings of the 2006 3rd International IEEE Conference Intelligent Systems, London, UK, 4–6 September 2006; pp. 690–695. [Google Scholar] [CrossRef]
- Baghli, F.Z.; bakkali, L.E.; Lakhal, Y. Optimization of Arm Manipulator Trajectory Planning in the Presence of Obstacles by Ant Colony Algorithm. Procedia Eng. 2017, 181, 560–567. [Google Scholar] [CrossRef]
- Wang, J.; Guo, M.; Li, L.; Sun, S.; Gu, S. Collision-free path planning of Dual-arm robots based on improved ant colony algorithm. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 1438–1442. [Google Scholar] [CrossRef]
- Huadong, Z.; Chaofan, L.; Nan, J. A Path Planning Method of Robot Arm Obstacle Avoidance Based on Dynamic Recursive Ant Colony Algorithm. In Proceedings of the 2019 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 12–14 July 2019; pp. 549–552. [Google Scholar] [CrossRef]
- Sadiq, A.; Raheem, F.; Abbas, N.F. Ant Colony Algorithm Improvement for Robot Arm Path Planning Optimization Based on D* Strategy. Int. J. Mech. Mechatronics Eng. 2021, 21, 96–111. [Google Scholar]
- Meng, X.; Zhu, X. Autonomous Obstacle Avoidance Path Planning for Grasping Manipulator Based on Elite Smoothing Ant Colony Algorithm. Symmetry 2022, 14, 1843. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Price, K. Differential evolution: A fast and simple numerical optimizer. In Proceedings of the North American Fuzzy Information Processing, Berkeley, CA, USA, 19–22 June 1996; pp. 524–527. [Google Scholar] [CrossRef]
- Saravanan, R.; Ramabalan, S. Evolutionary Minimum Cost Trajectory Planning for Industrial Robots. J. Intell. Robot. Syst. 2008, 52, 45–77. [Google Scholar] [CrossRef]
- Saravanan, R.; Ramabalan, S.; Balamurugan, C.; Subash, A. Evolutionary trajectory planning for an industrial robot. Int. J. Autom. Comput. 2010, 7, 190–198. [Google Scholar] [CrossRef]
- Gonzalez, C.; Blanco, D.; Moreno, L. Optimum robot manipulator path generation using Differential Evolution. In Proceedings of the 2009 IEEE Congress on Evolutionary Computation, Trondheim, Norway, 18–21 May 2009; pp. 3322–3329. [Google Scholar] [CrossRef]
- Das, S.D.; Bain, V.; Rakshit, P. Energy Optimized Robot Arm Path Planning Using Differential Evolution in Dynamic Environment. In Proceedings of the 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 14–15 June 2018; pp. 1267–1272. [Google Scholar] [CrossRef]
- Wang, M.; Luo, J.; Fang, J.; Yuan, J. Optimal trajectory planning of free-floating space manipulator using differential evolution algorithm. Adv. Space Res. 2018, 61, 1525–1536. [Google Scholar] [CrossRef]
- Muñoz, J.; López, B.; Quevedo, F.; Barber, R.; Garrido, S.; Moreno, L. Geometrically constrained path planning for robotic grasping with Differential Evolution and Fast Marching Square. Robotica 2023, 41, 414–432. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report, Technical Report-tr06; Erciyes University, Engineering Faculty, Computer Engineering Department: Kayseri, Turkey, 2005. [Google Scholar]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar] [CrossRef]
- Jin, F.; Shu, G. Path planning of free-flying space robot based on artificial bee colony algorithm. In Proceedings of the 2012 2nd International Conference on Computer Science and Network Technology, Changchun, China, 29–31 December 2012; pp. 505–508. [Google Scholar] [CrossRef]
- Savsani, P.; Jhala, R.; Savsani, V. Optimized trajectory planning of a robotic arm using teaching learning based optimization (TLBO) and artificial bee colony (ABC) optimization techniques. In Proceedings of the 2013 IEEE International Systems Conference (SysCon), Orlando, FL, USA, 15–18 April 2013; pp. 381–386. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhao, J.; Zhang, Z.; Li, X. Motion Planning of Dual-Chain Manipulator Based on Artificial Bee Colony Algorithm. In Proceedings of the 2023 9th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 21–23 April 2023; pp. 55–60. [Google Scholar] [CrossRef]
- Szczepanski, R.; Erwinski, K.; Tejer, M.; Bereit, A.; Tarczewski, T. Optimal scheduling for palletizing task using robotic arm and artificial bee colony algorithm. Eng. Appl. Artif. Intell. 2022, 113, 104976. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, L.; Shao, Z. Path Planning for Obstacle Avoidance of Manipulators Based on Improved Artificial Potential Field. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Zhao, X.; Zhao, P.; He, L. Time-optimal trajectory planning of serial manipulator based on adaptive cuckoo search algorithm. J. Mech. Sci. Technol. 2021, 35, 3171–3181. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, C.; Li, S.; Li, Z. Motion Planning of Redundant Manipulator With Variable Joint Velocity Limit Based on Beetle Antennae Search Algorithm. IEEE Access 2020, 8, 138788–138799. [Google Scholar] [CrossRef]
- Zhang, X.; Ming, Z. Trajectory Planning and Optimization for a Par4 Parallel Robot Based on Energy Consumption. Appl. Sci. 2019, 9, 2770. [Google Scholar] [CrossRef]
- Wang, T.; Xin, Z.; Miao, H.; Zhang, H.; Chen, Z.; Du, Y. Optimal Trajectory Planning of Grinding Robot Based on Improved Whale Optimization Algorithm. Math. Probl. Eng. 2020, 2020, 3424313. [Google Scholar] [CrossRef]
- Camacho-Villalón, C.L.; Dorigo, M.; Stützle, T. Exposing the grey wolf, moth-flame, whale, firefly, bat, and antlion algorithms: Six misleading optimization techniques inspired by bestial metaphors. Int. Trans. Oper. Res. 2023, 30, 2945–2971. [Google Scholar] [CrossRef]
- Wichapong, K.; Pholdee, N.; Bureerat, S.; Radpukdee, T. Trajectory planning of a 6D robot based on Meta Heuristic algorithms. In Proceedings of the MATEC Web of Conferences, EDP Sciences, Moscow, Russia, 21–23 June 2018; Volume 220, p. 06004. [Google Scholar]
- Hansen, N. The CMA Evolution Strategy: A Tutorial. arXiv 2016, arXiv:1604.00772. [Google Scholar] [CrossRef]
- Tanabe, R.; Fukunaga, A.S. Improving the search performance of SHADE using linear population size reduction. In Proceedings of the 2014 IEEE Congress on Evolutionary Computation (CEC), Beijing, China, 6–11 July 2014; IEEE: New York, NY, USA, 2014; pp. 1658–1665. [Google Scholar]
- Kůdela, J.; Juříček, M.; Parák, R. A Collection of Robotics Problems for Benchmarking Evolutionary Computation Methods. In Proceedings of the International Conference on the Applications of Evolutionary Computation (Part of EvoStar), Brno, Czech Republic, 12–14 April 2023; Springer: Berlin/Heidelberg, Germany, 2023; pp. 364–379. [Google Scholar]
- Mohamed, A.W.; Hadi, A.A.; Mohamed, A.K.; Awad, N.H. Evaluating the performance of adaptive gainingsharing knowledge based algorithm on cec 2020 benchmark problems. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; IEEE: New York, NY, USA, 2020; pp. 1–8. [Google Scholar]
- Hellwig, M.; Beyer, H.G. Benchmarking evolutionary algorithms for single objective real-valued constrained optimization–a critical review. Swarm Evol. Comput. 2019, 44, 927–944. [Google Scholar] [CrossRef]
- Kudela, J.; Juricek, M. Computational and Exploratory Landscape Analysis of the GKLS Generator. In Proceedings of the GECCO ’23 Companion: Proceedings of the Companion Conference on Genetic and Evolutionary Computation, Lisbon, Portugal, 15–19 July 2023; pp. 443–446. [Google Scholar]
- Brest, J.; Maučec, M.S.; Bošković, B. Single objective real-parameter optimization: Algorithm jSO. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), Donostia, Spain, 5–8 June 2017; pp. 1311–1318. [Google Scholar] [CrossRef]
- Bujok, P.; Tvrdík, J.; Poláková, R. Comparison of nature-inspired population-based algorithms on continuous optimisation problems. Swarm Evol. Comput. 2019, 50, 100490. [Google Scholar] [CrossRef]
- Kudela, J.; Matousek, R. New benchmark functions for single-objective optimization based on a zigzag pattern. IEEE Access 2022, 10, 8262–8278. [Google Scholar] [CrossRef]
- Del Ser, J.; Osaba, E.; Martinez, A.D.; Bilbao, M.N.; Poyatos, J.; Molina, D.; Herrera, F. More is not always better: Insights from a massive comparison of meta-heuristic algorithms over real-parameter optimization problems. In Proceedings of the 2021 IEEE Symposium Series on Computational Intelligence (SSCI), Virtual, 5–7 December 2021; IEEE: New York, NY, USA, 2021; pp. 1–7. [Google Scholar]
- Kudela, J.; Zalesak, M.; Charvat, P.; Klimes, L.; Mauder, T. Assessment of the performance of metaheuristic methods used for the inverse identification of effective heat capacity of phase change materials. Expert Syst. Appl. 2023, 238, 122373. [Google Scholar] [CrossRef]
- Kudela, J. Chance-Constrained Optimization Formulation for Ship Conceptual Design: A Comparison of Metaheuristic Algorithms. Computers 2023, 12, 225. [Google Scholar] [CrossRef]
- Bujok, P.; Lacko, M.; Kolenovskỳ, P. Differential Evolution and Engineering Problems. MENDEL J. 2023, 29, 45–54. [Google Scholar] [CrossRef]
- Hansen, N.; Auger, A.; Ros, R.; Mersmann, O.; Tušar, T.; Brockhoff, D. COCO: A Platform for Comparing Continuous Optimizers in a Black-Box Setting. Optim. Methods Softw. 2021, 36, 114–144. [Google Scholar] [CrossRef]
- Jakobi, N. Evolutionary robotics and the radical envelope-of-noise hypothesis. Adapt. Behav. 1997, 6, 325–368. [Google Scholar] [CrossRef]
- Koos, S.; Mouret, J.B.; Doncieux, S. The transferability approach: Crossing the reality gap in evolutionary robotics. IEEE Trans. Evol. Comput. 2012, 17, 122–145. [Google Scholar] [CrossRef]
- Salvato, E.; Fenu, G.; Medvet, E.; Pellegrino, F.A. Crossing the reality gap: A survey on sim-to-real transferability of robot controllers in reinforcement learning. IEEE Access 2021, 9, 153171–153187. [Google Scholar] [CrossRef]
- Jin, Y.; Wang, H.; Chugh, T.; Guo, D.; Miettinen, K. Data-driven evolutionary optimization: An overview and case studies. IEEE Trans. Evol. Comput. 2018, 23, 442–458. [Google Scholar] [CrossRef]
- Kudela, J.; Matoušek, R. Combining Lipschitz and RBF surrogate models for high-dimensional computationally expensive problems. Inf. Sci. 2023, 619, 457–477. [Google Scholar] [CrossRef]
- Kononova, A.V.; Vermetten, D.; Caraffini, F.; Mitran, M.A.; Zaharie, D. The Importance of Being Constrained: Dealing with Infeasible Solutions in Differential Evolution and Beyond. Evol. Comput. 2023, 1–46. [Google Scholar] [CrossRef] [PubMed]
- Corke, P.; Haviland, J. Not your grandmother’s toolbox–the Robotics Toolbox reinvented for Python. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May– 5 June 2021; IEEE: New York, NY, USA, 2021; pp. 11357–11363. [Google Scholar]



| Type of Robotic Structure | Evolutionary Algorithm | |||||
|---|---|---|---|---|---|---|
| PSO | GA | ACO | DE | ABC | Others | |
| (2, 3, …, n)-link (redundant) | X | X | X | X | X | |
| SCARA | X | X | X | |||
| Parallel | X | X | ||||
| Articulated (Industrial) | X | X | X | X | X | |
| Articulated (Collaborative) | X | X | X | X | ||
| Multi-Robot Cooperation | X | X | X | X | ||
| Special | X | X | X | X | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Juříček, M.; Parák, R.; Kůdela, J. Evolutionary Computation Techniques for Path Planning Problems in Industrial Robotics: A State-of-the-Art Review. Computation 2023, 11, 245. https://doi.org/10.3390/computation11120245
Juříček M, Parák R, Kůdela J. Evolutionary Computation Techniques for Path Planning Problems in Industrial Robotics: A State-of-the-Art Review. Computation. 2023; 11(12):245. https://doi.org/10.3390/computation11120245
Chicago/Turabian StyleJuříček, Martin, Roman Parák, and Jakub Kůdela. 2023. "Evolutionary Computation Techniques for Path Planning Problems in Industrial Robotics: A State-of-the-Art Review" Computation 11, no. 12: 245. https://doi.org/10.3390/computation11120245
APA StyleJuříček, M., Parák, R., & Kůdela, J. (2023). Evolutionary Computation Techniques for Path Planning Problems in Industrial Robotics: A State-of-the-Art Review. Computation, 11(12), 245. https://doi.org/10.3390/computation11120245