Multi-Path Data Distribution Mechanism Based on RPL for Energy Consumption and Time Delay

Abstract
1. Introduction
2. Related Work
2.1. RPL: Routing Protocol for Low Power and Lossy Networks
- DIO (DODAG information object): This message is used to build DODAG, which is broadcasted by the root node initially.
- DIS (destination advertisement solicitation): When a node wants to join DODAG, but it does not receive DIO, the node can actively send a DIS message to apply to join DODAG.
- DAO (destination advertisement object): Used to produce reverse routing information. Apart from root nodes, every other node can send DAO.
- DAO-ACK (DAO acknowledgement): Used to confirm DAO.
2.2. Multipath Routing
2.3. Energy-Aware Routing
2.4. End-to-End Delay
3. Adaptive Multipath Traffic Loading Based on RPL, AMTL-RPL
3.1. Energy Balance Based on the RPL
3.1.1. Node Energy Consumption Model
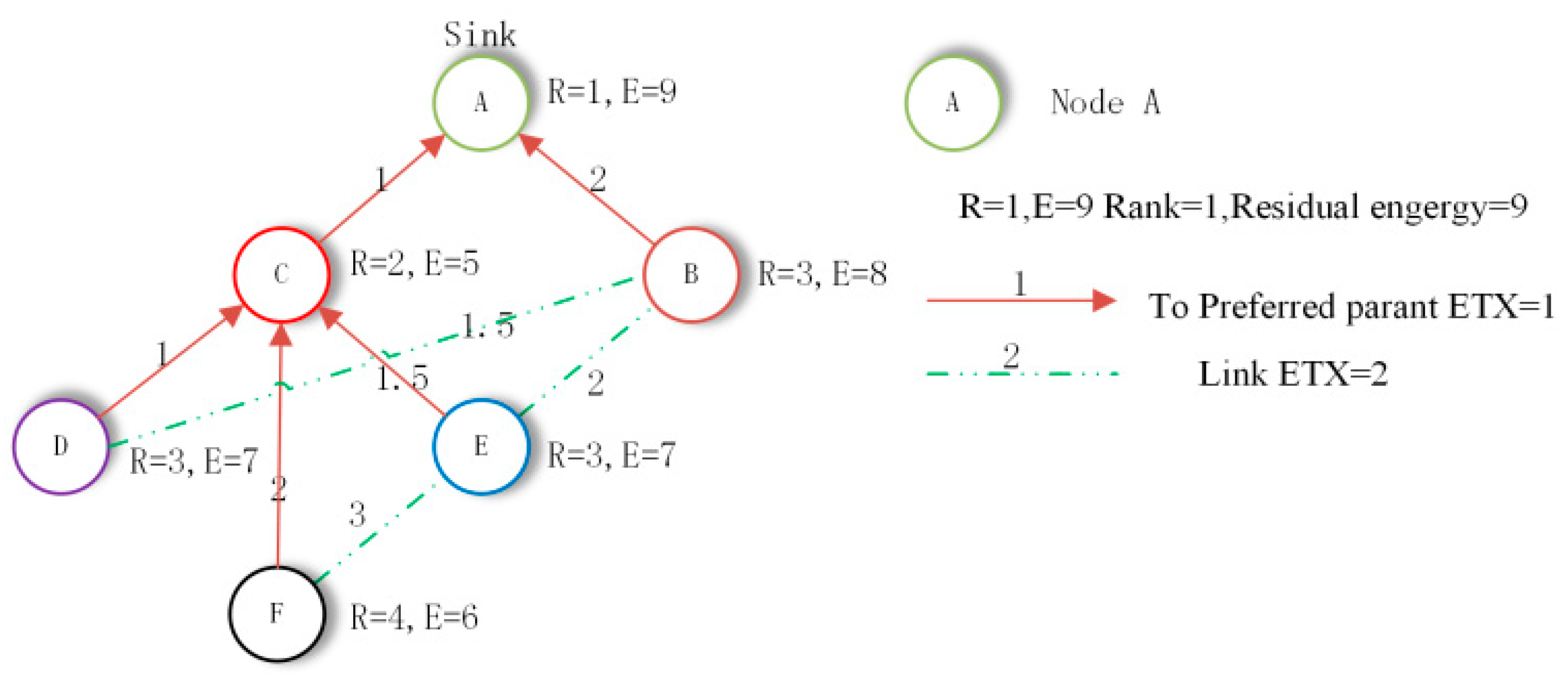
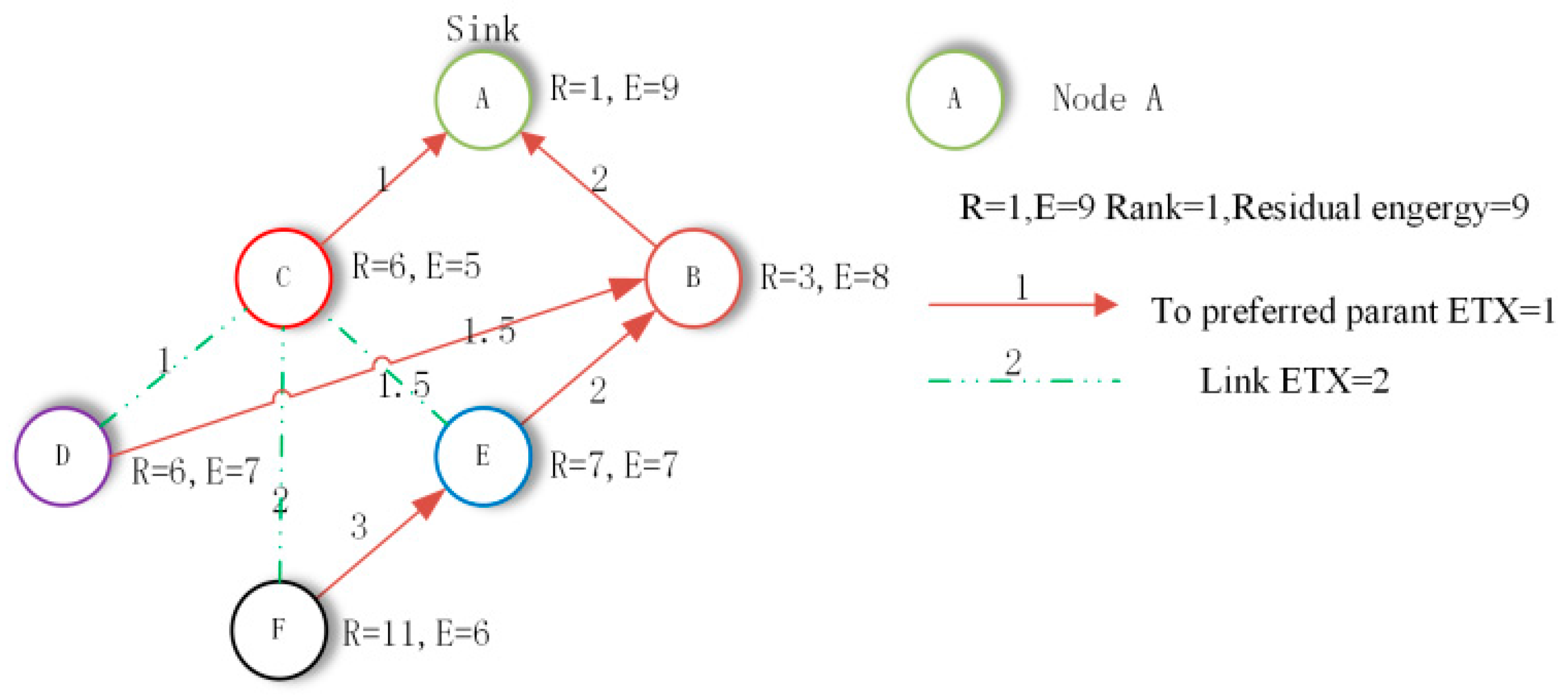
3.1.2. The Metric Definition of Energy Balance
| Algorithm 1 Evaluation of different metrics based on RPL protocol |
| Input: The sender node a; the candidate parent set of a, parent(a); the bottleneck set, C; and its number N Output: the preferred parent of a Initialization min_MD = 100,000;
|
3.1.3. Multi-Path Energy Consumption
3.2. Multi-Path Traffic Distributions
| Algorithm 2 Energy balance based on a multi-path |
| Input: Object function Output: for energy balance Initialization , = random [0, 1] and , ,
|
3.3. End-to-End Delay Optimization
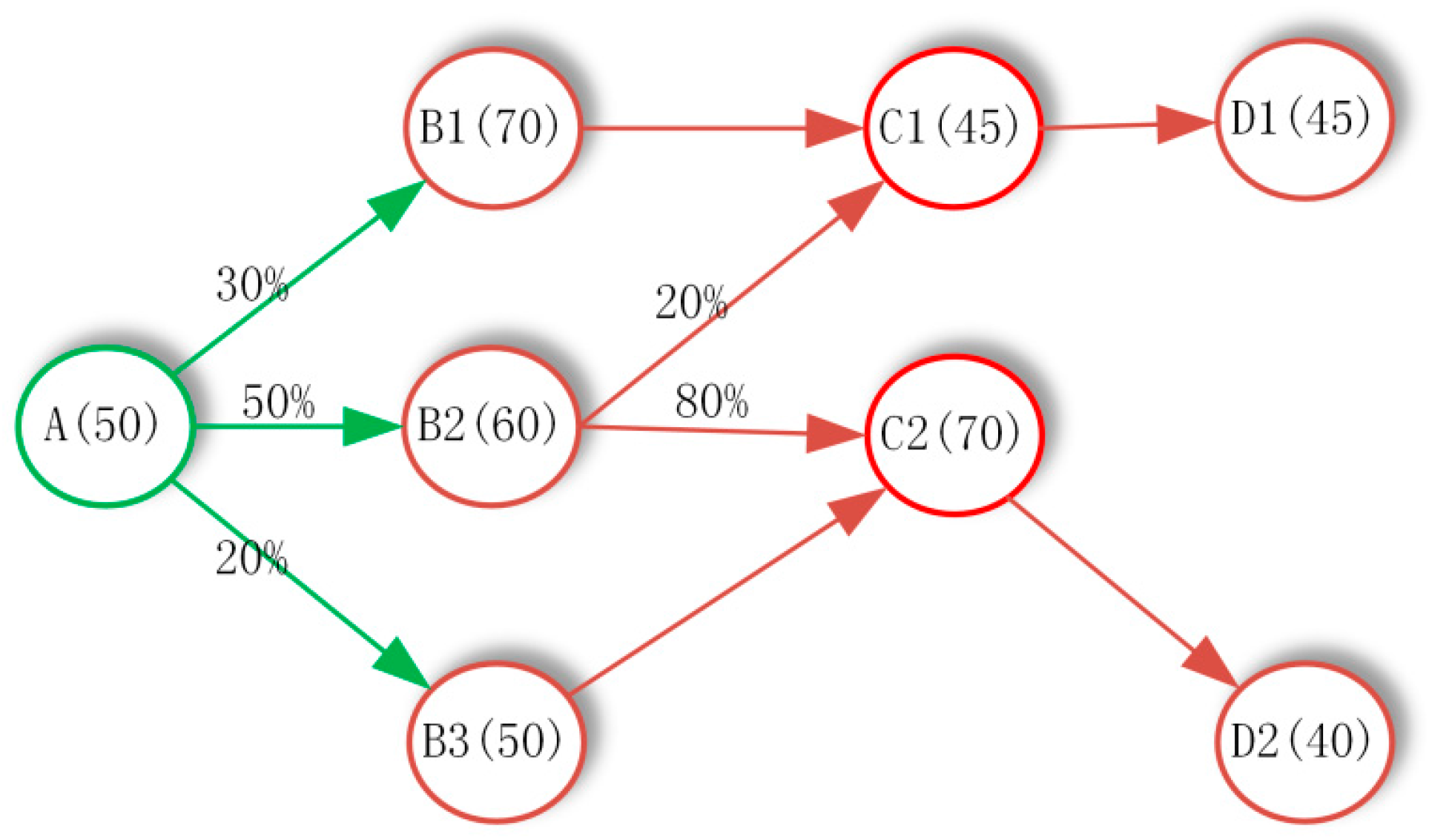
3.3.1. Data Forwarding Model and Node Transfer Latency
3.3.2. Waiting Time for Multi-Path Transmission Nodes
3.3.3. Multi-Path Traffic Distribution
| Algorithm 3 End-to-end delay based on multi-path |
| Input: The sender node A and its transmission quantity; the candidate parent set of A, parent(A) and its number; the bottleneck set, C, and its number N; Output: all
|
3.3.4. Adaptive Traffic Assignment Algorithm
| Algorithm 4 Adaptive Multipath Traffic Loading |
| Input: and // is the threshold for energy dispersion of the network, is the threshold utilization rate for delay of bottleneck. Output:
|
4. Analysis of the Performance
4.1. Evaluation Environment
4.2. Analysis of the Network Performance
4.2.1. Network Load Distribution with Different Buffer Size
4.2.2. Network-Lifetime
4.2.3. Analysis of the End-to-End Delay
4.2.4. The Stability of the Route
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, K.F. Smart home technology for telemedicine and emergency management. J. Ambient Intell. Humaniz. Comput. 2012, 4, 535–546. [Google Scholar] [CrossRef]
- Sanislav, T.; Mois, G.; Folea, S.; Miclea, L. A cloud-based Cyber-Physical System for environmental monitoring. In Proceedings of the 3rd Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 15–19 June 2014; pp. 6–9. [Google Scholar]
- Wang, S.; Xing, J.; Li, J.; Yang, Q. A decentralized flat control system for intelligent building. In Proceedings of the 27th Control and Decision Conference (CCDC), Qingdao, China, 23–25 May 2015; pp. 2622–2627. [Google Scholar]
- Thubert, P.; Winter, T.; Brandt, A.; Hui, J.; Kelsey, R.; Levis, P. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks. March 2012. Available online: https://www.rfc-editor.org/info/rfc6550 (accessed on 6 May 2017).
- Andrea, K.; Simon, R. Design and Evaluation of an RPL-based Multi-Sink Routing Protocol for Low-Power and Lossy Networks. In Proceedings of the 18th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Cancun, Mexico, 2–6 November 2015; pp. 141–150. [Google Scholar]
- De Couto, D.S.J.; Aguayo, D.; Bicket, J.; Morris, R. A High-Throughput Path Metric for Multi-Hop Wireless Routing; Springer Wireless Networks: London, UK, 2005; pp. 419–434. [Google Scholar]
- Conti, M.; Gregori, E.; Maselli, G. Reliable and efficient forwarding in ad hoc networks. Ad Hoc Netw. 2006, 4, 389–415. [Google Scholar] [CrossRef]
- Radi, M.; Dezfouli, B.; Bakar, K.A.; Lee, M. Multipath Routing in Wireless Sensor Networks: Survey and Research Challenges. Sensors 2012, 12, 650–685. [Google Scholar] [CrossRef] [PubMed]
- Hong, K.S.; Choi, L. DAG-based multipath routing for mobile sensor networks. In Proceedings of the ICT Convergence (ICTC), Seoul, Korea, 28–30 September 2011; pp. 261–266. [Google Scholar]
- Nurmio, J.; Nigussie, E.; Poellabauer, C. Equalizing energy distribution in sensor nodes through optimization of RPL. In Proceedings of the 15th IEEE International Conference on Computer and Information Technology, CIT 2015, Liverpool, UK, 26–28 October 2015; In Proceedings of the 14th IEEE International Conference on Ubiquitous Computing and Communications, IUCC 2015, Liverpool, UK, 26–28 October 2015; In Proceedings of the 13th IEEE International Conference on Dependable, Autonomic and Secure Computing, DASC 2015, Liverpool, UK, 26–28 October 2015; In Proceedings of the 13th IEEE International Conference on Pervasive Intelligence and Computing, PICom 2015, Liverpool, UK, 26–28 October 2015. pp. 83–91. [Google Scholar]
- Chen, Y.; Nasser, N. Energy-balancing multipath routing protocol for wireless sensor networks. In Proceedings of the 3rd International Conference on Quality of Service in Heterogeneous Wired/Wireless Networks, Waterloo, ON, Canada, 7–9 August 2006; pp. 21–24. [Google Scholar]
- Yahya, B.; Ben-Othman, J. REER: Robust and Energy Efficient Multipath Routing Protocol for Wireless Sensor Networks. In Proceedings of the Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–7. [Google Scholar]
- Liu, X.; Guo, J.; Bhatti, G.; Orlik, P. Load balanced routing for low power and lossy networks. In Proceedings of the Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 2238–2243. [Google Scholar]
- Moghadam, M.N.; Taheri, H. High throughput load balanced multipath routing in homogeneous wireless sensor networks. In Proceedings of the 22nd Iranian Electrical Engineering (ICEE), Tehran, Iran, 20–22 May 2014; pp. 1516–1521. [Google Scholar]
- Pavković, B.; Theoleyre, F.; Duda, A. Multipath opportunistic RPL routing over IEEE 802.15.4. In Proceedings of the 14th ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Miami, FL, USA, 31 October–4 November 2011; pp. 179–186. [Google Scholar]
- Grubman, T.; Şekercioğlu, Y.A.; Moore, N. Opportunistic Routing in Low Duty-Cycle Wireless Sensor Networks. ACM Trans. Sens. Netw. 2014, 10, 1–39. [Google Scholar]
- Kacimi, R.; Dhaou, R.; Beylot, A.L. Load balancing techniques for lifetime maximizing in wireless sensor networks. Ad Hoc Netw. 2013, 11, 2172–2186. [Google Scholar] [CrossRef]
- Iova, O.; Theoleyre, F.; Noel, T. Using multiparent routing in RPL to increase the stability and the lifetime of the network. Ad Hoc Netw. 2015, 29, 45–62. [Google Scholar] [CrossRef]
- Chang, J.H.; Tassiulas, L. Maximum lifetime routing in wireless sensor networks. IEEE/ACM Trans. Netw. 2004, 12, 609–619. [Google Scholar] [CrossRef]
- Systems, C.; Kim, M.; Pister, K.; Dejean, N.; Barthel, D. Routing Metrics Used for Path Calculation in Low-Power and Lossy Networks. March 2012. Available online: https://www.rfc-editor.org/info/rfc6551 (accessed on 20 April 2017).
- Liu, H.; Zhang, Z.L.; Srivastava, J.; Firoiu, V. PWave: A Multi-source Multi-sink Anycast Routing Framework for Wireless Sensor Networks. In Proceedings of the 6th International IFIP-TC6 Networking Conference, Atlanta, GA, USA, 14 May 2007; pp. 179–190. [Google Scholar]
- Chang, L.H.; Lee, T.H.; Chen, S.J.; Liao, C.Y. Energy-Efficient Oriented Routing Algorithm in Wireless Sensor Networks. In Proceedings of the Systems, Man, and Cybernetics (SMC), Manchester, UK, 13–16 October 2013; pp. 3813–3818. [Google Scholar]
- Le, Q.; Ngo-Quynh, T.; Magedanz, T. RPL-based multipath routing protocols for Internet of Things on wireless sensor networks. In Proceedings of the Advanced Technologies for Communications (ATC), Hanoi, Vietnam, 15–17 October 2014; pp. 424–429. [Google Scholar]
- Hossain, A.K.M.; Sreenan, C.J.; Alberola, R.D.P. Neighbour-disjoint multipath for low-power and lossy networks. ACM Trans. Sens. Netw. 2016, 12, 23. [Google Scholar] [CrossRef]
- Barcelo, M.; Correa, A.; Vicario, J.L.; Morell, A. Cooperative interaction among multiple RPL instances in wireless sensor networks. Comput. Commun. 2016, 81, 61–67. [Google Scholar] [CrossRef]
- Gonizzi, P.; Monica, R.; Ferrari, G. Design and evaluation of a delay-efficient RPL routing metric. In Proceedings of the 9th International Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 1573–1577. [Google Scholar]
- Mohamed, B.; Mohamed, F. QoS Routing RPL for Low Power and Lossy Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 1–10. [Google Scholar] [CrossRef]
- Gaddour, O.; Koubâa, A.; Abid, M. Quality-of-service aware routing for static and mobile IPv6-based low-power and lossy sensor networks using RPL. Ad Hoc Netw. 2015, 33, 233–256. [Google Scholar] [CrossRef]
- Michel, M.; Duquennoy, S.; Quoitin, B. Load-Balanced Data Collection through Opportunistic Routing. In Proceedings of the Distributed Computing in Sensor Systems (DCOSS), Fortaleza, Brazil, 10–12 June 2015; pp. 62–70. [Google Scholar]
- Hao, X.C.; Wang, M.Q.; Hou, S.; Gong, Q.Q.; Liu, B. Distributed Topology Control and Channel Allocation Algorithm for Energy Efficiency in Wireless Sensor Network: From a Game Perspective. EBSCO. Wirel. Pers. Commun. 2015, 80, 1557–1577. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning | Notation | Meaning |
|---|---|---|---|
| Etat(x) | Sending energy consumption of x | Tr | Receive time |
| Erce(x) | Receiving energy consumption of x | Ecrt | Current energy |
| Ecmp(x) | Calculating energy consumption of x | Erse | Residual energy |
| Et | Sending energy consumption per second | Tat(x,y) | Data transfer from x to y |
| Er | Receiving energy consumption per second | Buffer_Use(x) | Node x cache usage |
| Ec | Energy consumption per instruction cycle | Ntask | Task processing instruction cycle |
| Dd | Sending rate | Dp | Processing rate |
| Dr | Receiving rate | PRR(x,y) | x received a number of ACK packets |
| Sr | Receive data | Tp | Processing time of each instruction |
| Measurement | Maximum | Minimum | Average |
|---|---|---|---|
| Range | 98.6920 | 96.3815 | 97.5278 |
| Average Deviation | 40.4198 | 9.3249 | 26.5953 |
| Standard Deviation | 28.7187 | 9.3249 | 28.5178 |
| ED | 1.4985 × 104 | 3.9625 × 103 | 8.6994 × 104 |
| Measurement | Maximum | Minimum | Average |
|---|---|---|---|
| Range | 71.0600 | 69.9184 | 71.0588 |
| Average Deviation | 27.7367 | 6.1617 | 27.7151 |
| Standard Deviation | 28.8025 | 6.1617 | 28.8007 |
| ED | 1.0438 × 105 | 574.5076 | 678.3107 |
| Parameter | Value |
|---|---|
| Number of nodes | At most 89 |
| Area | 100 × 100 m |
| communication radius | 10–20 m |
| Flow patterns and rates | CBR, 5 pkt/min |
| The size of packet | 126 bytes |
| Duration time | 1 h |
| Number of bottleneck | 5 |
| Minimum step size of RPL | MinHopRankIncrease = 128 |
| Trickle | Imin = 27 ms, Imax = 16 ms, k = 10 |
| MAC | IEEE 802.15.4 |
| Energy consumption model | According to CC2530 data sheet |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, L.; Wang, R.; Yang, H. Multi-Path Data Distribution Mechanism Based on RPL for Energy Consumption and Time Delay. Information 2017, 8, 124. https://doi.org/10.3390/info8040124
Zhu L, Wang R, Yang H. Multi-Path Data Distribution Mechanism Based on RPL for Energy Consumption and Time Delay. Information. 2017; 8(4):124. https://doi.org/10.3390/info8040124
Chicago/Turabian StyleZhu, Licai, Ruchuan Wang, and Hao Yang. 2017. "Multi-Path Data Distribution Mechanism Based on RPL for Energy Consumption and Time Delay" Information 8, no. 4: 124. https://doi.org/10.3390/info8040124
APA StyleZhu, L., Wang, R., & Yang, H. (2017). Multi-Path Data Distribution Mechanism Based on RPL for Energy Consumption and Time Delay. Information, 8(4), 124. https://doi.org/10.3390/info8040124